bionica quick
DESCRIPTION
Bionica quickTRANSCRIPT
UNIVERSIDAD NACIONAL DE SAN AGUSTIN
FACULTAD DE PRODUCCIÓN Y SERVICIOS
ESCUELA PROFESIONAL DE INGENIERÍA ELECTRÓNICA
Primera Monografía de Ing. Biomédica
Tema: Biónica
Docente: Ing. Erasmo Sulla Espinoza
Integrantes:
Torres Machaca, Luis A.
Santana Solis, Luis A.
03 Setiembre del 2015
Arequipa 2015-B
INDICE
Resumen 1
Introducción
Desarrollo
Evolución de la prótesis
¿Qué es la biónica? 2
Prótesis 3
Tipos de prótesis
Prótesis pasivas Prótesis mecánicas Prótesis eléctricas Prótesis neumáticas Prótesis mioeléctricas Prótesis hibridas
Prótesis de mano biónica 4
Exo esqueleto 5
Prótesis coclear6
Glosario
Bibliografía 7
Resumen
En este documento se realizara una idea general del estudio acerca del tema de la biónica. Gracias a la biónica, una de las ramas de la robótica, se logra reemplazar miembros humanos por artefactos distintos a los naturales convirtiéndose en una herramienta de gran ayuda para personas con/sin ciertas discapacidades. Con el pasar de los años, el campo de la robótica aplicada al ser humano (Biónica) ha proporcionado al ser humano extremidades complementarias, las mismas que se vuelven cada vez más eficientes.
INTRODUCCION
Desde hace tiempo el hombre se ha enfrentado ya sea a situaciones peligrosas o sido blanco de enfermedades en las cuales ha sido inevitable la perdida de alguna de sus extremidades y en el peor de los casos de su vida, un claro ejemplo son las guerras en donde los soldados morían o eran mutilados en el fervor de la batalla o en la actualidad los accidentes de tránsito, malas prácticas deportivas, enfermedades cancerígenas, etc. Y ya que la tecnología ha avanzado a paso agigantados y siempre con el mismo objetivo, el de facilitar de alguna manera la vida del ser humano, es así que surge la necesidad de reemplazar ciertas partes del cuerpo por aparatos robóticos o mejorar ciertas características del mismo.
DESARROLLO
Evolución de las prótesis
El uso de las prótesis tiene un pasado compartido con respecto a nuestra historia desde tiempos muy antiguos, y este ha ido evolucionando junto a la adquisición de conocimiento del hombre. La transformación de las prótesis es larga y está plagada de historias, desde sus comienzos primitivos, pasando por el sofisticado presente, hasta las increíbles visiones del futuro.
Al igual que en otros campos, algunas ideas e invenciones han funcionado y se han explorado más detalladamente, como el pie de posición fija, mientras que otras se han dejado de lado o peor aún, se volvieron obsoletas, como el uso de hierro en las prótesis. El largo y complejo
camino hacia la pierna computarizada comenzó alrededor del año 1500 a.C. y, desde entonces ha estado en constante evolución. Ha habido muchos perfeccionamientos desde las primeras patas de palo y los primeros ganchos de mano, y el resultado ha sido la fijación y el moldeado altamente personalizado que se encuentran en los dispositivos actuales.
¿Qué es la Biónica?
La palabra biónica (ciencia que estudia como los seres vivos realizan ciertas tareas, para luego crear aparatos electrónicos que los imiten) fue acuñada en 1958, por el medico estadounidense Jack Steele (1924-2009). El primer elemento (bio-), viene del griego bios (bios = vida, como en biología). El segundo elemento (-nica) es la terminación de la palabra electrónica.
La palabra bios se vincula con la raíz indoeuropea *gwei- (vivir), de donde nos viene la palabra vida a través del latín vita.
La biónica engloba varios conocimientos interdisciplinarios entre la biología y la electrónica cuyo propósito es la creación de sistemas artificiales para producir características y la estructura de organismos vivos.
Mano biónica, que permite sentir lo que se está tocando
Prótesis biónica que imita el movimiento natural de la flexión del tobillo
Prótesis
Es la sustitución de un órgano del cuerpo o un miembro por otro con un dispositivo o aparato en especial que reproduce lo mejor posible la parte que falta o esté dañada.
Tipos de prótesis
Prótesis pasivas.- Son conocidas como prótesis estéticas, estas no tienen movimiento, su función es solo cubrir el aspecto estético del miembro amputado
Prótesis mecánicas.- Estas cumplen las funciones básicas como apertura y cerrado de la mano. Están limitadas para el agarre de objetos grandes y a movimientos imprecisos.
Prótesis Eléctricas.- Su uso se basa en motores eléctricos, que pueden controlarse mediante servo-motores, pulsantes o interruptores. Posee desventajas como reparación muy costosa, su peso y al estar expuesto a ambientes hostiles se deteriora
Prótesis Neumáticas.- Estas hacen uso del aire de presión obtenido de un compresor, esta puede proporcionar una gran fuerza y rapidez de movimiento pero los dispositivos que se complementan para su control son relativamente grandes y su mantenimiento costoso
Prótesis mioeléctricas.- Estas prótesis son de mayor aplicación en la actualidad, debido a que brindan un mayor confort y un elevado porcentaje de precisión y fuerza, basado en la obtención de señales musculares obtenidas mediante el uso de electrodos.
Prótesis Hibridas.- Estas son utilizadas por personas que tienen amputaciones por encima del coso, ya que fusiona la acción del cuerpo con el accionamiento por electricidad.
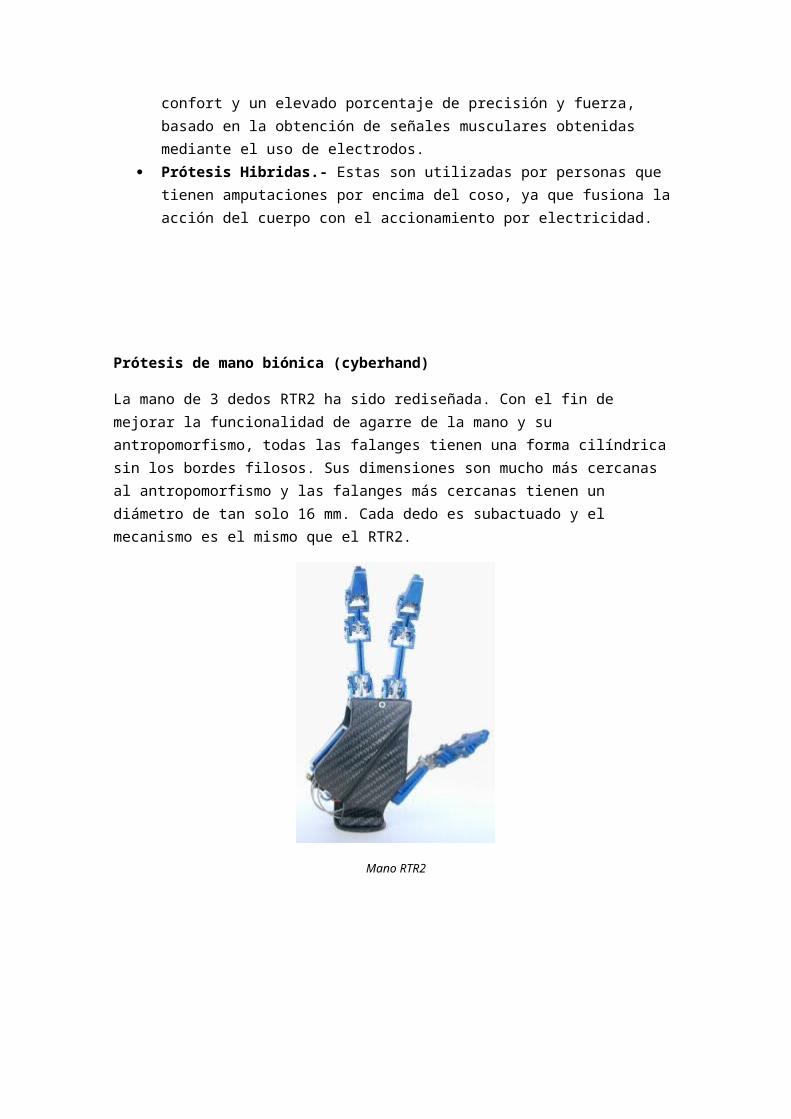
Prótesis de mano biónica (cyberhand)
La mano de 3 dedos RTR2 ha sido rediseñada. Con el fin de mejorar la funcionalidad de agarre de la mano y su antropomorfismo, todas las falanges tienen una forma cilíndrica sin los bordes filosos. Sus dimensiones son mucho más cercanas al antropomorfismo y las falanges más cercanas tienen un diámetro de tan solo 16 mm. Cada dedo es subactuado y el mecanismo es el mismo que el RTR2.
Mano RTR2
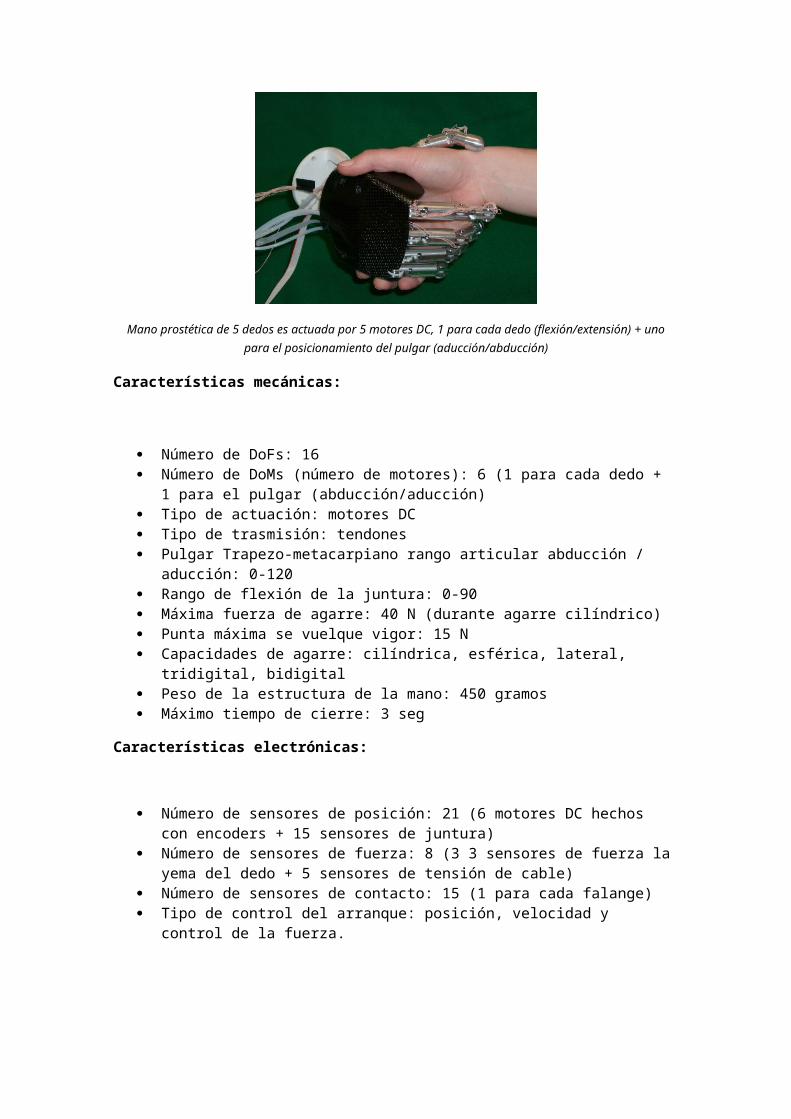
Mano prostética de 5 dedos es actuada por 5 motores DC, 1 para cada dedo (flexión/extensión) + uno para el posicionamiento del pulgar (aducción/abducción)
Características mecánicas:
Número de DoFs: 16 Número de DoMs (número de motores): 6 (1 para cada dedo + 1 para el pulgar
(abducción/aducción) Tipo de actuación: motores DC Tipo de trasmisión: tendones Pulgar Trapezo-metacarpiano rango articular abducción / aducción: 0-120
Rango de flexión de la juntura: 0-90 Máxima fuerza de agarre: 40 N (durante agarre cilíndrico) Punta máxima se vuelque vigor: 15 N Capacidades de agarre: cilíndrica, esférica, lateral, tridigital, bidigital Peso de la estructura de la mano: 450 gramos Máximo tiempo de cierre: 3 seg
Características electrónicas:
Número de sensores de posición: 21 (6 motores DC hechos con encoders + 15 sensores de juntura)
Número de sensores de fuerza: 8 (3 3 sensores de fuerza la yema del dedo + 5 sensores de tensión de cable)
Número de sensores de contacto: 15 (1 para cada falange) Tipo de control del arranque: posición, velocidad y control de la fuerza.
Exo esqueleto
¿Cómo Funciona un Exoesqueleto?
¿Qué es un exoesqueleto?
Exo es una palabra griega que significa fuera. De manera opuesta al esqueleto humano normal, el cual sostiene el cuerpo desde adentro, un exoesqueleto sostiene al cuerpo desde afuera. Los exoesqueletos usualmente son diseñados para permitir caminar o aumentar la fuerza y resistencia a las personas con desordenes de movilidad.
Los exoesqueletos tienen varios componentes clave:
Marco: Usualmente hecho de materiales ligeros, el marco debe ser lo suficientemente fuerte para sostener el peso del cuerpo así como el peso del exoesqueleto y sus componentes. El marco también debe poder sostener el cuerpo en su lugar de una manera segura sin el riesgo que quien lo usa se caiga. El marco usualmente tiene una serie de uniones las cuales coinciden con las uniones del cuerpo, en la cadera, la rodilla y tobillo.
Baterías: Deben poder hacer funcionar el exoesqueleto la mayor parte del día o ser fáciles de reemplazar para que las baterías agotadas puedan quitarse fácilmente y ser reemplazadas con baterías cargadas durante el día. Las baterías deben ser ligeras y pequeñas para que el exoesqueleto no sea ni pesado ni voluminoso. Las baterías también deben ser de recarga rápida para que el exoesqueleto esté listo para el siguiente día.
Sensores: Estos capturan la información sobre como el usuario desea moverse. Los sensores pueden ser manuales, como una palanca, o pueden ser eléctricos y detectar los impulsos fisiológicos generados por el cuerpo, o los sensores pueden estar combinados con dispositivos como un control remoto y un detector de movimiento que permite a quien lo usa cambiar el
movimiento de caminar a subir gradas. La información capturada por los sensores es enviada a la computadora para ser analizada.
Controlador: Actúa como el cerebro del dispositivo, el controlador es una computadora a bordo la cual toma la información capturada por los sensores y controla a los actuadores. La computadora coordina a los distintos actuadores en el exoesqueleto y permite al exoesqueleto y su usuario, pararse, caminar, subir o descender.
Actuadores: Si el marco es como los huesos del cuerpo y el controlador el cerebro, entonces los actuadores son como los músculos que ejercen el movimiento. Los actuadores son usualmente motores eléctricos o hidráulicos. Usando la energía de las baterías y la información enviada por la computadora, los actuadores mueven el exoesqueleto y la persona que lo usa.
Control de Balance y Paso: La mayoría de los exoesqueletos actuales no ofrecen control de balance o paso. Los exoesqueletos actuales requieren que el usuario tenga suficiente fuerza de la parte superior del cuerpo para que el exoesqueleto y el usuario no se caigan. El balance de los exoesqueletos actuales es usualmente controlado con el uso de muletas. También, la mayoría de exoesqueletos en la actualidad no imitan el paso humano normal. Caminar ha sido descrito como el “caer hacia delante de manera controlada”. Con cada paso, lanzamos nuestros cuerpos hacia adelante y movemos el otro pie para que nos reciba y evite que nuestros cuerpos caigan al suelo. El paso humano normal se mueve de talón a pie y de pie a punta cuando caminamos. Nuestro paso cambia cuando caminamos hacia adelante o hacia atrás, o subimos una grada o bajamos una colina. Los exoesqueletos de la actualidad no pueden imitar estas funciones y son menos eficientes y menos cómodos. Los exoesqueletos del futuro seguramente tendrán sistemas de control de balance integrados, como giroscopios, para evitar que el usuario caiga y controles de paso integrados los cuales imitaran el movimiento fisiológico humano normal.
Exo esqueleto de Rex Bionics
Exo esqueleto HULC, para uso militar
Prótesis coclear
Es una prótesis electrónica que permite a pacientes con sordera severa y profunda recuperar cierta percepción auditiva, estimulando las neuronas aferentes y permitiendo así obtener la sensación de sonido.
Glosario
DOFS : Distributed Optical Fiber Sensing (Distribuido de fibra óptica de detección)
DOMS : Delayed Onset Muscular Soreness (Dolor Muscular de inicio retrasado)
Bibliografía
https://www.media.mit.edu/people/hherr
http://news.mit.edu/2014/hugh-herr-bionic-ankle-emulates-nature-0417#.U0_Vf6wDSSk.twitter
http://www.advancedbionics.com/com/en/your_journey/what_is_a_cochlearimplantsystem.html
http://www-arts.sssup.it/Cyberhand/introduction/biomechand.htm
http://intl.eksobionics.com/