apuntes estática estructural f monroy fi unam 2008
DESCRIPTION
Estática EstructuralTRANSCRIPT
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 1/322
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 2/322
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICOFACULTAD DE INGENIERÍA
APUNTES DE ESTÁTICA ESTRUCTURAL
FERNANDO MONROY MIRANDA
DIVISIÓN DE INGENIERÍAS CIVIL Y GEOMÁTICA
DEPARTAMENTO DE ESTRUCTURAS
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 3/322
Apuntes de Estática Estructural
PRÓLOGO
Estos apuntes de Estática Estructural surgen de la conveniencia de rescatar y actualizar parte de unmaterial existente y que era de uso común por algunos profesores y alumnos de la carrera de Ing. Civilde la Facultad de Ingeniería de la UNAM desde hace varios años. Los cambios en el orden y contenidode la materia producto de las modificaciones al plan de estudios de la carrera hacen necesaria suadecuación para que este material se siga utilizando.
Dado que el material original representa el esfuerzo de varios profesores del Departamento deEstructuras, el autor considera conveniente incluir en el presente trabajo parte de ese materialenriqueciéndolo con elementos propios desarrollados durante los años en que ha impartido la materia ysobre todo adecuarlos al contenido de la misma.
Este material tiene por objeto ayudar a los alumnos que cursan la materia de “ESTÁTICA
ESTRUCTURAL” en la teoría y la aplicación de los temas incluidos en el programa de esta asignaturaincluyendo una serie de ejercicios típicos que se pueden encontrar dispersos en algunos textosrelacionados con la materia.
Para la solución de la mayoría de los problemas, en general, aplicarán y reforzarán los conceptos básicos de la estática, en otros tendrán que demostrar cierta habilidad en el manejo de las ecuaciones deequilibrio estático y relaciones entre ellas. La mayoría de los ejemplos vienen acompañados de lasolución correspondiente para que sirva de guía y comprobación al alumno.
Se procurará que este material sea revisado con cierta frecuencia para enriquecerlo con los comentarios
y sugerencias de los interesados en la materia así como de adecuarlos a los futuros cambios ynecesidades del programa de la asignatura mencionada.
El autor agradece a loa Ingenieros Luis Herrejón De La Torre y Agripino Galván Sánchez por permitirle incluir, en este trabajo, gran parte del material elaborado por cada uno de ellos, lo quefacilitó la actualización de estos apuntes.
Ciudad Universitaria, México, D. F. Mayo 2008
Fernando Monroy Miranda
Fernando Monroy, Facultad de Ingeniería UNAMii
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 4/322
Apuntes de Estática Estructural
ÍNDICE
1.
Conceptos básicos de la estática
Introducción.
.1.1 Definiciones: modelo de cuerpo, partícula, cuerpo rígido y cuerpo deformable1.2 Leyes de Newton y algunas de sus aplicaciones.1.3 Descripción de los tipos de fuerzas. Efectos internos y externos producidos por
fuerzas. Postulado de Stevin o Regla Generalizada del Paralelogramo. Principios deequilibrio, de transmisibilidad y de superposición de causas y efectos.
1.4
Momento de una fuerza respecto a un punto y respecto a un eje.1.5
Par de Fuerzas, Momento de un par de fuerzas.
2. Estudio de los sistemas de fuerzas
2.1
Teorema de Varignon. Sistema general de fuerzas. Sistemas generales de fuerzas,fuerzas concurrentes, colineales, paralelas, en el plano y en el espacio.
2.2
Sistemas equivalentes de fuerzas. Traslación de una fuerza, par de transporte.2.3
Definición de diagrama de cuerpo libre.2.4
Ejemplos y aplicaciones a cuerpos rígidos.
3. Propiedades Geométricas de superficies planas
3.1 Primero momento de superficies planas.
3.2
Obtención de centroides de superficies planas.3.3 Segundo momento de superficies planas.3.4 Producto de inercia y radio de giro de superficies planas3.5 Centro de gravedad, centros de masa.
4. Equilibrio de sistemas de fuerzas y de cuerpos
4.1 Sistema de fuerza en equilibrio. Condiciones para el equilibrio en el plano y en elespacio.
4.2 Equilibrio Estático y Dinámico.
4.3
Grados de libertad en el plano y en el espacio.4.4 Tipos de apoyos más usuales y simbología. Restricciones al giro y aldesplazamiento.
4.5 Hipostaticidad, isostaticidad e hiperestaticidad de las estructuras.4.6 Obtención de reacciones en estructuras isostáticas.
5. Elementos mecánicos en estructuras formadas por barras
Fernando Monroy, Facultad de Ingeniería UNAMiii
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 5/322
Apuntes de Estática Estructural
5.1 Fuerzas internas y fuerzas externas.5.2 Definición de momento flexionante, fuerza cortante y fuerza axial y su relación
entre ellos con las fuerzas externas aplicadas.5.3 Obtención de las ecuaciones de elementos mecánicos y trazo de diagramas.5.4 Obtención directa de diagramas de elementos mecánicos por el método de la suma y
por superposición.
5.5
Obtención de diagramas en estructuras con barras inclinadas, Sistemas decoordenadas globales y locales. Matriz de transformación.5.6 Obtención de diagramas en estructuras con barras de eje curvo. Arcos en
compresión.5.7 Armaduras isostáticas. Hipótesis para su análisis. Estabilidad geométrica. Método
de los nudos. Método de las secciones. Solución de ejemplos por computadora.
Apéndice A. Solicitaciones Sobre las Estructuras
Apéndice B. Propiedades Geométricas de una superficie poligonal, aplicación de lacomputadora
Apéndice C. Aplicación de las funciones de singularidad a la obtención de elementosmecánicos
Apéndice D. Planteamiento matricial de las ecuaciones de equilibrio estático para lasolución de armaduras planas isostáticas, aplicación de la computadora
Apéndice E. Cables flexibles e inextensibles
INTRODUCCIÓN
Fernando Monroy, Facultad de Ingeniería UNAMiv
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 6/322
Apuntes de Estática Estructural
En el campo de las estructuras, la asignatura de Estática Estructural es el comienzo del aprendizaje conrespecto al comportamiento de las estructuras en cuanto a fuerzas se refiere, por lo que constituye unantecedente fundamental para que el alumno pueda cursar las asignaturas de Mecánica de Materiales,Análisis Estructural y Diseño Estructural. Por esta razón, y para evitar deficiencias o complicacionesen el desarrollo del estudiante durante su formación académica, es necesario que comprenda y practique los temas elementales de dicho campo.
El presente trabajo se elaboró con el objetivo de integrar los elementos básicos de esta disciplina con base en el programa vigente de la materia y pueda emplearse como material de texto o apoyo para losalumnos que cursen la asignatura.
Sabemos que los temas contenidos en el programa, pueden ser encontrados en una gran variedad delibros, aunque en ocasiones es laborioso encontrar uno de esos textos que nos muestre la mayoría deesos temas. Los apuntes de la materia sirven como un elemento que ayuda a comenzar la búsqueda deinformación o simplemente como una introducción de lo que contempla el curso. Para abundar oextenderse más en el conocimiento de temas específicos, se proporcionan referencias bibliográficas queayudarán a ese fin.
Por lo anterior, en los capítulos 1 y 2 se presentan los conceptos básicos de la asignatura, como lo sondefiniciones de estructura, elementos estructurales, solicitaciones y análisis de cargas, todo esto con el propósito de conocer los elementos principales con los que se trabaja en los capítulos subsecuentes,también se estudian los diagramas de cuerpo libre en nudos y barras, los diferentes tipos de apoyo que podemos encontrar en las estructuras.
En el capítulo 3 se estudian algunas propiedades de las superficies planas como son momentosestáticos y centroides así como centro de masa, algunos de estos conceptos se aplican para la obtenciónde resultantes de fuerzas con determinada ley de variación.
En el capítulo 4 se estudian a los sistemas de fuerza, obteniéndose la resultante de los diversos sistemasde fuerzas, también se plantean las ecuaciones de equilibrio estático que ayudarán a obtener el valor delas incógnitas (reacciones en los apoyos). También se trata el comportamiento lineal y se incluye elPrincipio de Superposición, el cual facilita el trabajo con diversos tipos, sistemas y combinaciones decargas. Este capítulo, finaliza con el análisis de la isostaticidad en las estructuras.
En el capítulo 5, se analizan las estructuras isostáticas sometidas a fuerzas estáticas, se presentan losconceptos de momento flexionante y momento torsionante, fuerza cortante y fuerza axial, tambiénconocidos como elementos mecánicos. Ya definidos los términos anteriores se pasa a la obtención desus características en formas estructurales sencillas: vigas, marcos y arcos para continuar con el trazode diagramas de elementos mecánicos, que son una herramienta muy útil e indispensable en el área de
las estructuras.
En este capítulo, también se incluye el análisis de arcos en compresión y el análisis de armaduras planas, para estas se analiza el comportamiento estructural, estabilidad y métodos de análisis, como elmétodo de los nudos, método de las secciones.También se incluyen una serie de apéndices que contienen algunos temas que pueden ser consideradoscomo tópicos sobre la estática estructural, por ejemplo, el tema de cables, elementos importantes enalgunas estructuras así como la aplicación de las computadoras a la solución de problemas, ejes principales de superficies planas, propiedades geométricas de una superficie poligonal, aplicación de
Fernando Monroy, Facultad de Ingeniería UNAMv

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 7/322
Apuntes de Estática Estructural
las funciones de singularidad a la obtención de elementos mecánicos, solución matricial de armaduras planas isostáticas y el campo de la Ingeniería Estructural.
Se sugiere que el alumno complemente el estudio de este material con los ejemplos que sobre lamateria se presentan en las publicaciones respectivas editadas por el departamento de Estructuras de laDivisión de Ingeniería Civil y Geomática de la Facultad de la UNAM.
Fernando Monroy, Facultad de Ingeniería UNAMvi
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 8/322
Apuntes de Estática Estructural
FUNDAMENTOS DE LA ME CÁNICA CLÁSICA
Introducción
Con el fin de comprender aspectos básicos de la Ingeniería Estructural, es necesario precisar algunos
términos de uso común, como lo son el de: estructura, elementos estructurales y cargas o acciones.
Estructura, es un conjunto de elementos estructurales que interactúan entre sí, convenientemente
dispuestos y vinculados entre sí con el propósito, principalmente, de soportar las cargas aplicadassobre ella y transferirlas a sus apoyos y de estos hacia el terreno (Figura 1.1).
Figura 1.1. Estructura para una nave industrial.
Los elementos estructurales, son las piezas fundamentales de una estructura. Son elementos físicos y
están construidos con materiales que, en general, deben ser resistentes y poco deformables (Figura 1.2).
La clasificación clásica contempla elementos nombrados generalmente barras, placas y sólidos, y
específicamente reciben el nombre de: vigas, trabes, contratrabes, columnas, castillos, diagonales,
Fernando Monroy, Facultad de Ingeniería UNAM
1
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 9/322
Apuntes de Estática Estructural
montantes, cuerdas, contravientos, losas, muros, etc. las características específicas que hacen que un
elemento reciba particularmente alguno de los nombres anteriores las trataremos más adelante.
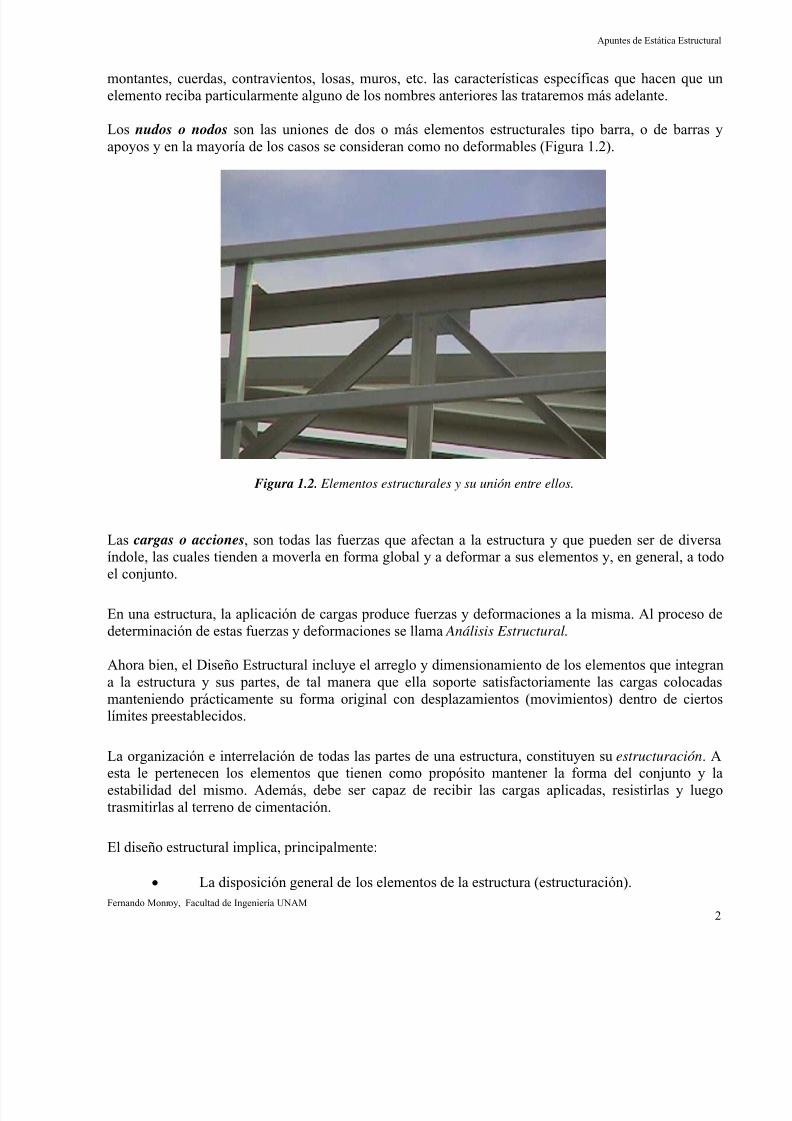
Los nudos o nodos son las uniones de dos o más elementos estructurales tipo barra, o de barras y
apoyos y en la mayoría de los casos se consideran como no deformables (Figura 1.2).
Figura 1.2. Elementos estructurales y su unión entre ellos.
Las cargas o acciones, son todas las fuerzas que afectan a la estructura y que pueden ser de diversa
índole, las cuales tienden a moverla en forma global y a deformar a sus elementos y, en general, a todoel conjunto.
En una estructura, la aplicación de cargas produce fuerzas y deformaciones a la misma. Al proceso de
determinación de estas fuerzas y deformaciones se llama Análisis Estructural.
Ahora bien, el Diseño Estructural incluye el arreglo y dimensionamiento de los elementos que integran
a la estructura y sus partes, de tal manera que ella soporte satisfactoriamente las cargas colocadas
manteniendo prácticamente su forma original con desplazamientos (movimientos) dentro de ciertoslímites preestablecidos.
La organización e interrelación de todas las partes de una estructura, constituyen su estructuración. Aesta le pertenecen los elementos que tienen como propósito mantener la forma del conjunto y la
estabilidad del mismo. Además, debe ser capaz de recibir las cargas aplicadas, resistirlas y luego
trasmitirlas al terreno de cimentación.
El diseño estructural implica, principalmente:
• La disposición general de los elementos de la estructura (estructuración).
Fernando Monroy, Facultad de Ingeniería UNAM
2
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 10/322
Apuntes de Estática Estructural
• El estudio de los posibles tipos o formas estructurales que representen solucionesfactibles.
• La selección de los materiales a utilizar con fines estructurales.
• Consideración de los tipos de acciones que puedan presentarse sobre la estructura
(viento, sismo, etc.).
• Análisis y diseño preliminares de las soluciones posibles así como su evaluación.
• Selección de una alternativa de solución y análisis y diseño estructural final de la
estructura, incluyendo la preparación de planos estructurales, especificaciones,
recomendaciones de tipo constructivo, mantenimiento, etc.
Es importante mencionar que, una propuesta de solución a un problema específico debe ser la másconveniente después de haber considerado la diversidad de factores, que en muchos casos busca lograr
el mayor beneficio social posible combinando funcionalidad, resistencia, durabilidad, factores
ambientales, estéticos, tiempo y costo.
El realizar una obra de ingeniería implica también llevar un orden, que empieza con el planteamiento
del problema y termina con la puesta en operación de su solución, sin olvidar el mantenimiento que sele tenga que dar durante su vida útil. El proceso se puede dividir en cinco etapas:
a) Planeación b) Proyecto
c) Análisis
d) Diseño y dimensionamiento
e) Ejecución de la obra (supervisión estructural)
a) Planeación
La etapa de planeación es el estudio de las necesidades y análisis de los recursos, para obtener el
planteamiento general de la solución.
Un programa de necesidades se deriva del conocimiento del problema por resolver, de cuya solución
general se determina un plan a seguir. Para esto se considera toda la gama de elementos que puedaninfluir en la solución del problema o que aporten alguna proposición particular para ella.
b) Proyecto
El proyecto involucra la geometría general y distribución particular del sistema mecánico o estructural,
de acuerdo con los servicios u objetivo que prestará durante su vida útil.
Una vez conocidos el programa de necesidades por satisfacer y, en general, los recursos disponibles
para ello, se elabora un proyecto o una proposición concreta para resolver el problema, pero sin entraren detalles sobre las dimensiones de los elementos de dicha proposición.
Fernando Monroy, Facultad de Ingeniería UNAM
3
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 11/322
Apuntes de Estática Estructural
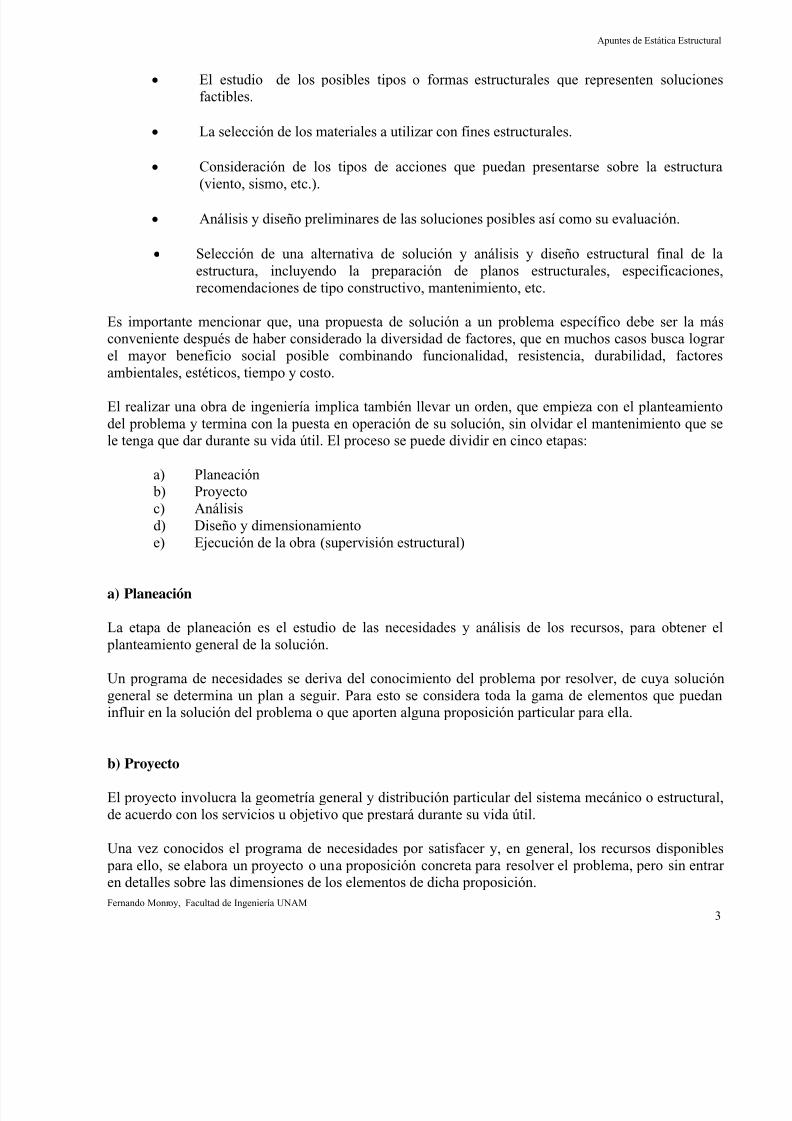
c) Análisis
Dentro del análisis, primero se determinan todas las cargas que actúan sobre el sistema, incluyendodesde luego, las de su peso propio y otras, producto de su función específica y localización geográfica
y topográfica. Después, se definen los tipos de uniones que deben existir entre los diversos elementos
del sistema estructural y entre éstos y el sistema de tierra o algún otro al cual se fije.
Por último, se calculan los efectos internos (fuerzas y momentos) en las secciones transversales de los
elementos del sistema producto de la combinación de acciones (fuerzas) definidas por un criterio o
reglamento y según el tipo de estructura. Lo que interesa especialmente, es determinar los valorescaracterísticos, o sea, máximos, mínimos o nulos de esos efectos y el lugar específico de la estructura
en que se encuentran todos ellos, lo mismo que las funciones matemáticas que los definen.
El análisis también incluye la determinación de los efectos externos producidos por esas acciones tales
como: deformaciones, vibraciones y agrietamientos con el fin de determinar que ellos no rebasen
ciertos límites preestablecidos los cuales, de acuerdo a la experiencia, se consideren adecuados.
Figura 1.3. Modelo de computadora para el análisis estructural de un puente.
d) Diseño y dimensionamiento
En función de las fuerzas y momentos obtenidos en la etapa anterior y tomando en cuenta la forma de
las secciones transversales de los diferentes miembros y los materiales disponibles para suconstrucción, se obtienen o verifican las dimensiones de cada elemento estructural para que todos los
elementos sean capaces de resistir esas fuerzas, vertiendo los datos correspondientes en los diferentes
tipos de planos.
También se verificará que la respuesta (desplazamientos, vibraciones, etc.) que experimentan los
elementos estructurales se mantengan dentro de ciertos valores máximos generalmente especificados en
el reglamento a utilizar.
e) Ejecución
Fernando Monroy, Facultad de Ingeniería UNAM
4
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 12/322
Apuntes de Estática Estructural
Una vez terminadas las etapas anteriores, se tiene una serie de planos de la estructura, en los cuales se
concreta y detalla la solución propuesta por el equipo de ingeniería; dicho conjunto abarca las
diferentes vistas arquitectónicas, los sistemas internos y externos de unión, la ubicación ycaracterísticas de las secciones transversales de los miembros con sus dimensiones particulares y los
materiales que constituyen la estructura. Cada plano, debidamente acotado, irá acompañado de los
detalles (cortes, uniones, etc,) y notas que aclaren, ayuden y simplifiquen posteriormente el proceso
constructivo.
Para realizar la obra, se elabora un plan a seguir según la planeación realizada en la primera etapa,
considerando todos los recursos disponibles y las recomendaciones generales durante el diseño de lamisma. Se idea también un programa de construcción para la obra, durante su ejecución es conveniente
realizar inspecciones periódicas para verificar que se han seguido las especificaciones de la estructura
indicadas en planos y se han utilizado los materiales estructurales con las calidades y característicasindicadas por el proyectista de la estructura y que se está construyendo de acuerdo a la práctica usual y
se han implementado y realizado las pruebas de obra y laboratorio necesarias para verificar esa calidad.
1.1 Definiciones
Como sabemos, la aplicación de la estática permite el estudio de las fuerzas y los siguientes conceptosacerca del equilibrio son de gran importancia.
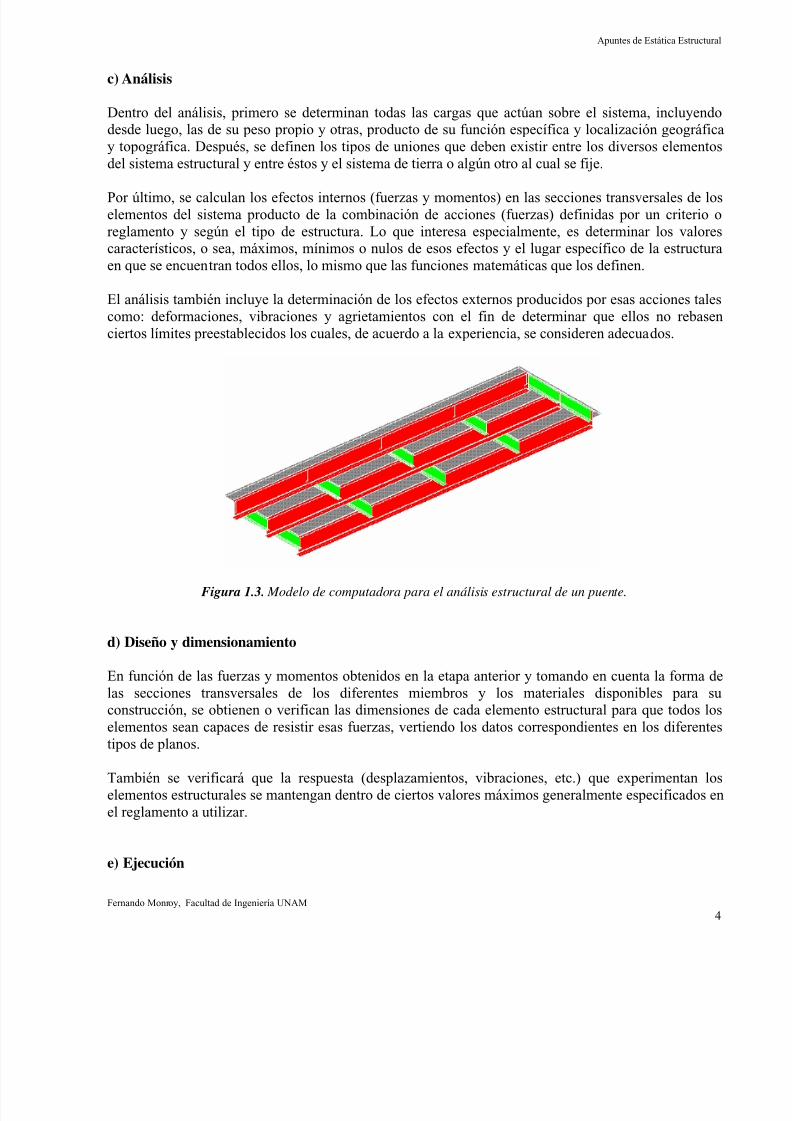
1.1.1 Modelo de cuerpo
Un cuerpo puede ser considerado como una cierta cantidad de materia con forma y dimensiones dadas,
en los problemas de estática estructural, es común asociar al cuerpo una propiedad de superficie, masao peso.
Figura 1.4 a. Modelo de cuerpo.
Fernando Monroy, Facultad de Ingeniería UNAM
5
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 13/322
Apuntes de Estática Estructural
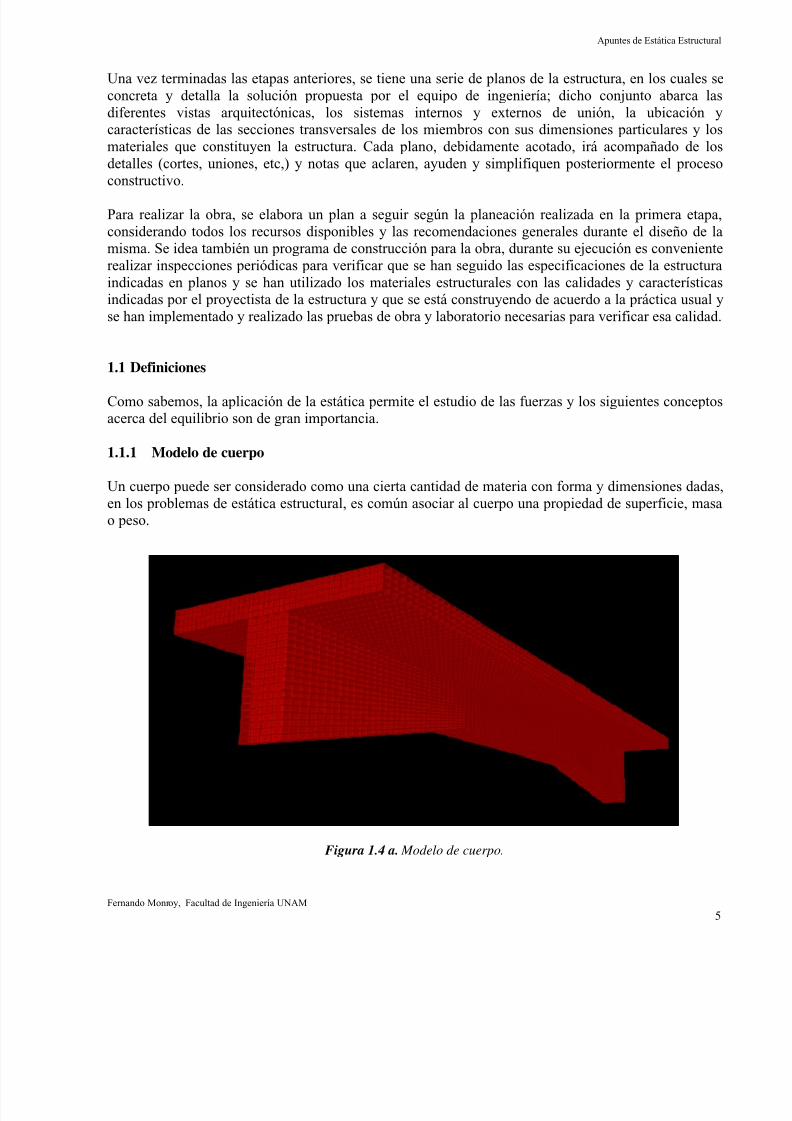
Figura 1.4 b. Cuerpo físico (Estructura).
1.1.2 Punto material o partícula
Es un cuerpo cuyas dimensiones son tan pequeñas, que las fuerzas que sobre él actúan pueden
considerarse concentradas (Figura 1.5).
FuerzaPunto material
Figura 1.5. Punto material o partícula.
1.1.3 Cuerpo rígido
Es aquel cuyas partículas no sufren desplazamientos relativos al actuar fuerzas sobre él (Figura 1.6a).
Fernando Monroy, Facultad de Ingeniería UNAM
6
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 14/322
Apuntes de Estática Estructural
b'
d = invariable
deformación
d'
b
..
a.
a'.
d a
b
'd d ≠
d
a) Cuerpo Rígido b) Cuerpo Deformable
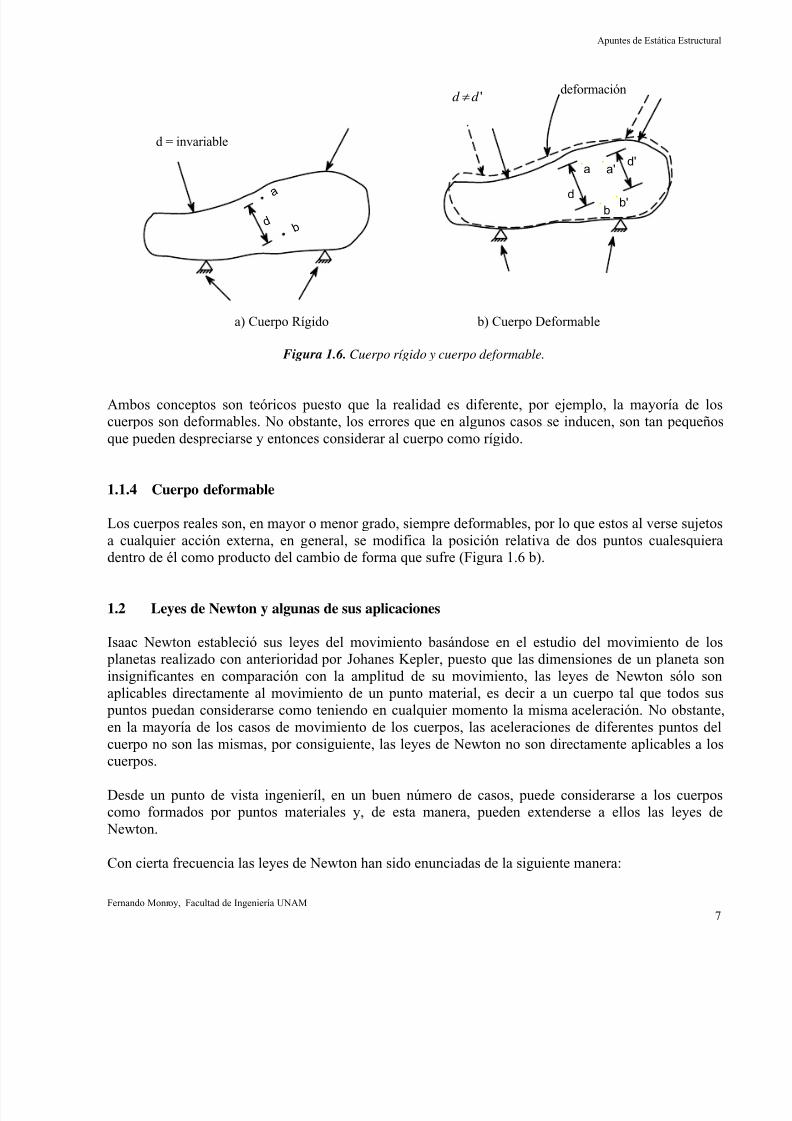
Figura 1.6. Cuerpo rígido y cuerpo deformable.
Ambos conceptos son teóricos puesto que la realidad es diferente, por ejemplo, la mayoría de loscuerpos son deformables. No obstante, los errores que en algunos casos se inducen, son tan pequeños
que pueden despreciarse y entonces considerar al cuerpo como rígido.
1.1.4 Cuerpo deformable
Los cuerpos reales son, en mayor o menor grado, siempre deformables, por lo que estos al verse sujetos
a cualquier acción externa, en general, se modifica la posición relativa de dos puntos cualesquiera
dentro de él como producto del cambio de forma que sufre (Figura 1.6 b).
1.2 Leyes de Newton y algunas de sus aplicaciones
Isaac Newton estableció sus leyes del movimiento basándose en el estudio del movimiento de los planetas realizado con anterioridad por Johanes Kepler, puesto que las dimensiones de un planeta son
insignificantes en comparación con la amplitud de su movimiento, las leyes de Newton sólo son
aplicables directamente al movimiento de un punto material, es decir a un cuerpo tal que todos sus puntos puedan considerarse como teniendo en cualquier momento la misma aceleración. No obstante,
en la mayoría de los casos de movimiento de los cuerpos, las aceleraciones de diferentes puntos del
cuerpo no son las mismas, por consiguiente, las leyes de Newton no son directamente aplicables a loscuerpos.
Desde un punto de vista ingenieríl, en un buen número de casos, puede considerarse a los cuerposcomo formados por puntos materiales y, de esta manera, pueden extenderse a ellos las leyes de
Newton.
Con cierta frecuencia las leyes de Newton han sido enunciadas de la siguiente manera:
Fernando Monroy, Facultad de Ingeniería UNAM
7
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 15/322
Apuntes de Estática Estructural
Primera ley. Si sobre un punto material no actúa ninguna fuerza, el punto continúa en reposo o se
mueve con una velocidad uniforme en línea recta.
La primera ley implica que un punto material se resiste a que cambie su movimiento es decir, tiene
inercia. Implica que una fuerza tiene que actuar sobre el punto para que su movimiento (velocidad)
cambie en dirección o en magnitud, es decir, se acelere.
Segunda ley. Si sobre un punto material actúa una fuerza, este se acelera; la dirección de la aceleración
es la misma que la de la fuerza y su magnitud es directamente proporcional a la fuerza e inversamente
proporcional a la masa del punto.
La segunda ley es cuantitativa, nos dice cuál debe ser la magnitud y la dirección de la fuerza para
producir una cierta aceleración de un punto material especifico y, muestra que, aunque un puntomaterial no puede por sí mismo cambiar su estado de movimiento, sin embargo, si influye en el cambio
de movimiento causado por la fuerza, regulando o gobernando la manera en que tendrá lugar la
aceleración; es decir, que ésta siempre será inversamente proporcional a la masa del punto.
Tercera ley. Entre dos puntos materiales cualesquiera de un cuerpo, existen acciones mutuas tales que
la acción de uno sobre el otro es igual, colineal y opuesta a la de aquél sobre éste.
En la segunda ley se supone que sobre un punto único actúa una sola fuerza. Pero la tercera ley hace
resaltar el hecho de que no existe una fuerza única. El significado especial de la tercera ley reside en
que, mediante su uso, la segunda ley de Newton (que sólo es aplicable a un punto único bajo lainfluencia de una fuerza única), puede extenderse a un sistema de puntos (cuerpo) sobre el que actúa un
sistema de fuerzas.
La segunda ley de Newton puede expresarse matemáticamente por medio de la ecuación siguiente.
F = ma (1.1)
Donde a es la aceleración del punto de masa m, y F es la fuerza única que actúa sobre el puntomaterial. En general, la masa de un cuerpo se designará por M y la de un punto material del cuerpo porm o dM .
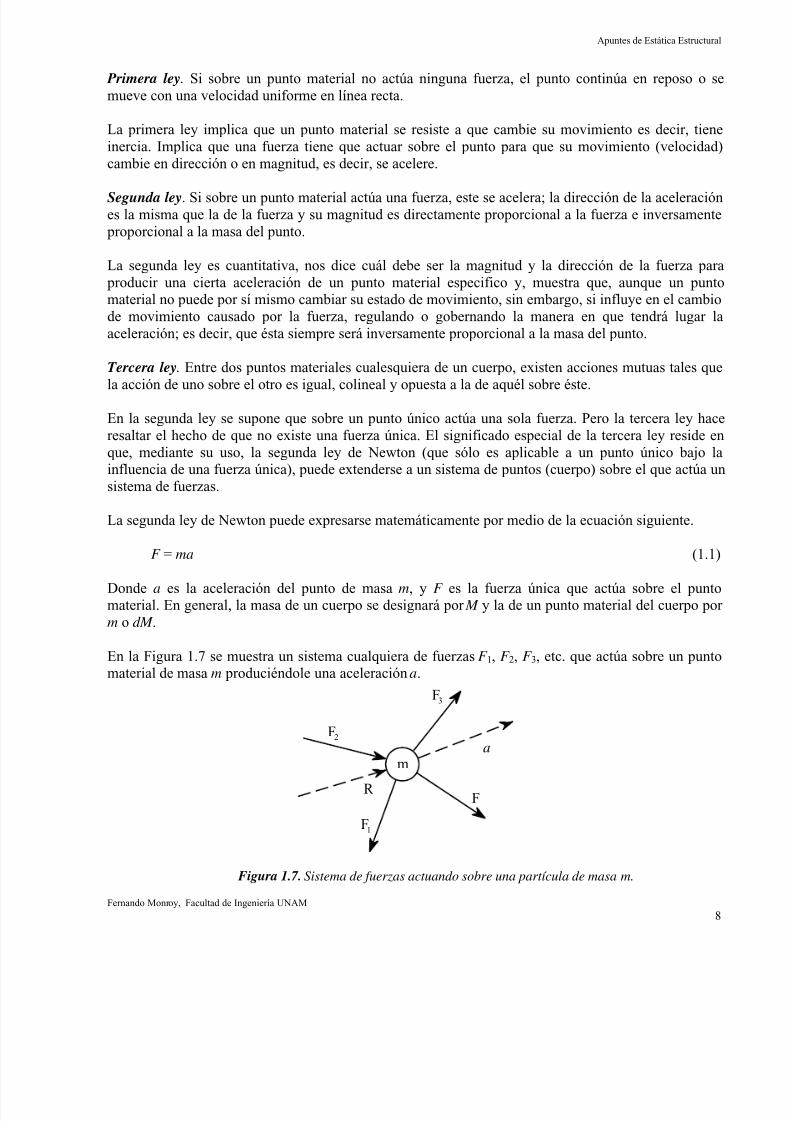
En la Figura 1.7 se muestra un sistema cualquiera de fuerzas F 1, F 2, F 3, etc. que actúa sobre un puntomaterial de masa m produciéndole una aceleración a.
2F
3F
1F
FR
am
Figura 1.7. Sistema de fuerzas actuando sobre una partícula de masa m.
Fernando Monroy, Facultad de Ingeniería UNAM
8
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 16/322
Apuntes de Estática Estructural
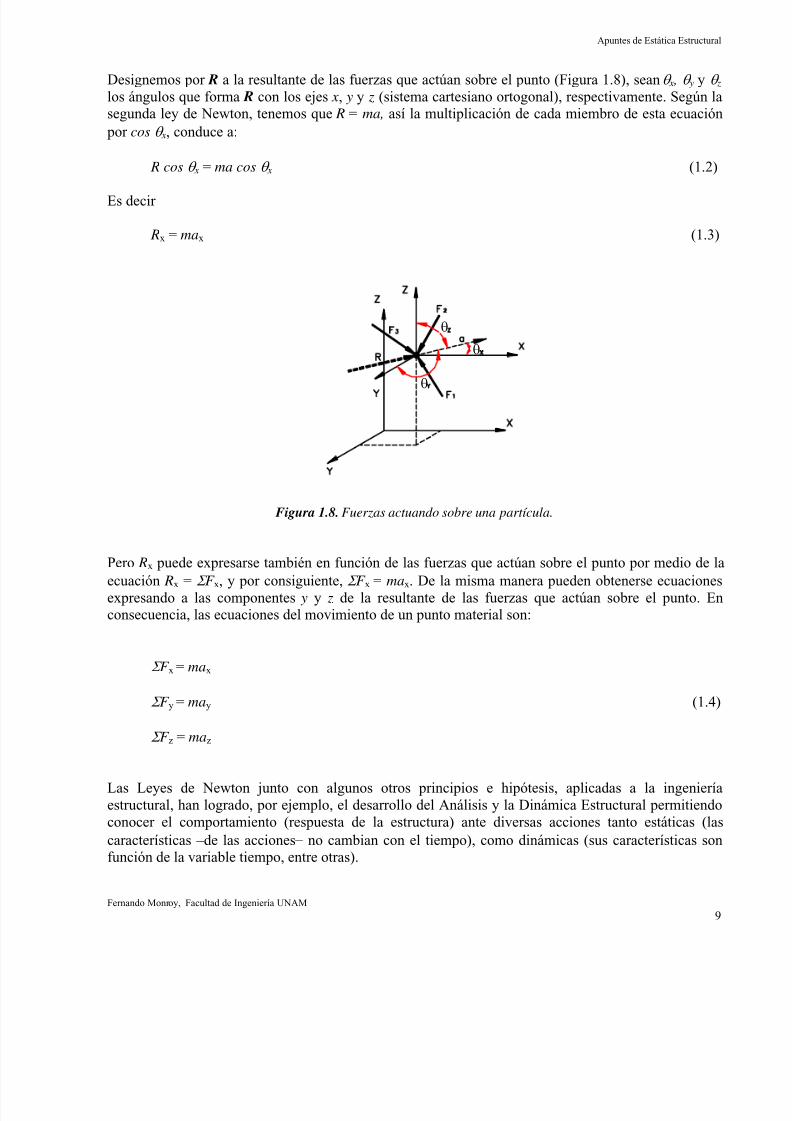
Designemos por R a la resultante de las fuerzas que actúan sobre el punto (Figura 1.8), sean θ x , θ y y θ z
los ángulos que forma R con los ejes x, y y z (sistema cartesiano ortogonal), respectivamente. Según lasegunda ley de Newton, tenemos que R = ma, así la multiplicación de cada miembro de esta ecuación
por cos θ x, conduce a:
R cos θ x = ma cos θ x (1.2)
Es decir
Rx = max (1.3)
Figura 1.8. Fuerzas actuando sobre una partícula.
θ
θ
θ
Pero Rx puede expresarse también en función de las fuerzas que actúan sobre el punto por medio de laecuación Rx = Σ F x, y por consiguiente, Σ F x = max. De la misma manera pueden obtenerse ecuaciones
expresando a las componentes y y z de la resultante de las fuerzas que actúan sobre el punto. Enconsecuencia, las ecuaciones del movimiento de un punto material son:
Σ F x = max
Σ F y = may (1.4)
Σ F z = maz
Las Leyes de Newton junto con algunos otros principios e hipótesis, aplicadas a la ingeniería
estructural, han logrado, por ejemplo, el desarrollo del Análisis y la Dinámica Estructural permitiendo
conocer el comportamiento (respuesta de la estructura) ante diversas acciones tanto estáticas (las
características –de las acciones− no cambian con el tiempo), como dinámicas (sus características sonfunción de la variable tiempo, entre otras).
Fernando Monroy, Facultad de Ingeniería UNAM
9
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 17/322
Apuntes de Estática Estructural
1.3 Descripción de los tipos de fuerzas
1.3.1 Concepto de fuerza
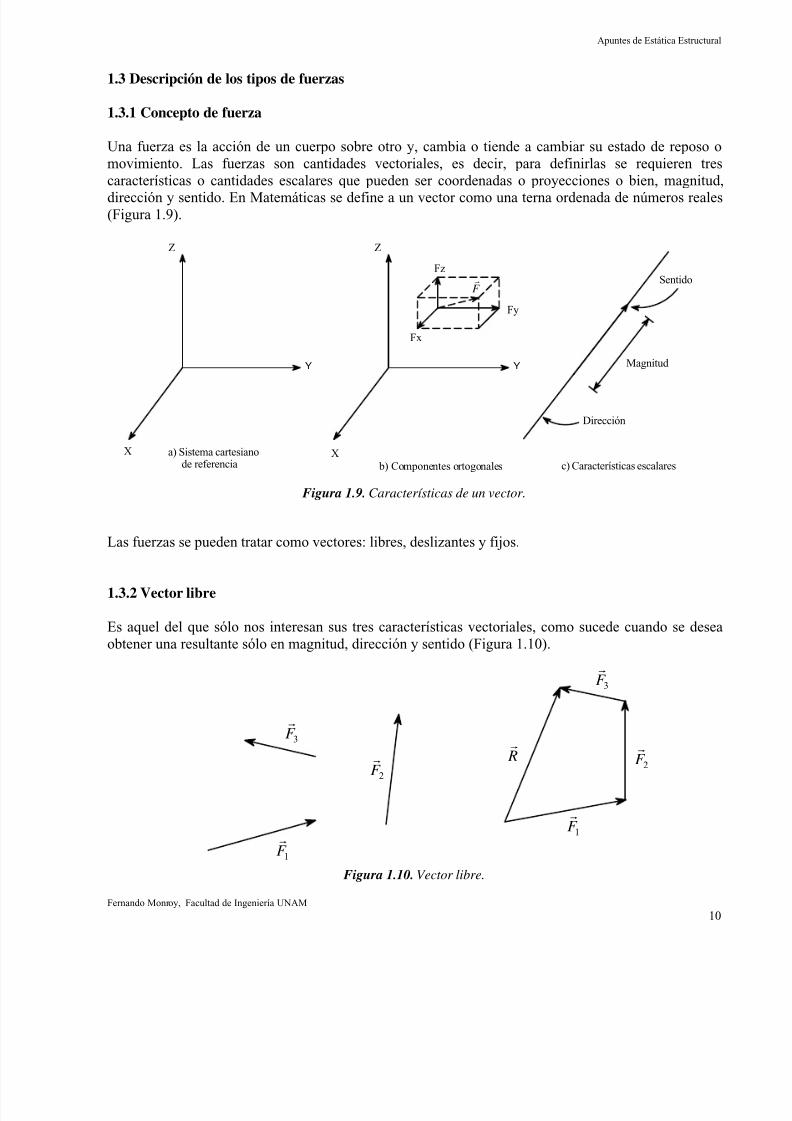
Una fuerza es la acción de un cuerpo sobre otro y, cambia o tiende a cambiar su estado de reposo o
movimiento. Las fuerzas son cantidades vectoriales, es decir, para definirlas se requieren tres
características o cantidades escalares que pueden ser coordenadas o proyecciones o bien, magnitud,dirección y sentido. En Matemáticas se define a un vector como una terna ordenada de números reales
(Figura 1.9).
Fx
Fy
Magnitud
Sentido
c) Características escalares
Fz
Z
Y
X
Dirección
a) Sistema cartesiano de referencia b) Componentes ortogonales
F r
Z
Y
X
Figura 1.9. Características de un vector.
Las fuerzas se pueden tratar como vectores: libres, deslizantes y fijos.
1.3.2 Vector libre
Es aquel del que sólo nos interesan sus tres características vectoriales, como sucede cuando se desea
obtener una resultante sólo en magnitud, dirección y sentido (Figura 1.10).
3F r
3F r
2F r
1F r
2F r
1F r
Rr
Figura 1.10. Vector libre.
Fernando Monroy, Facultad de Ingeniería UNAM
10
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 18/322
Apuntes de Estática Estructural
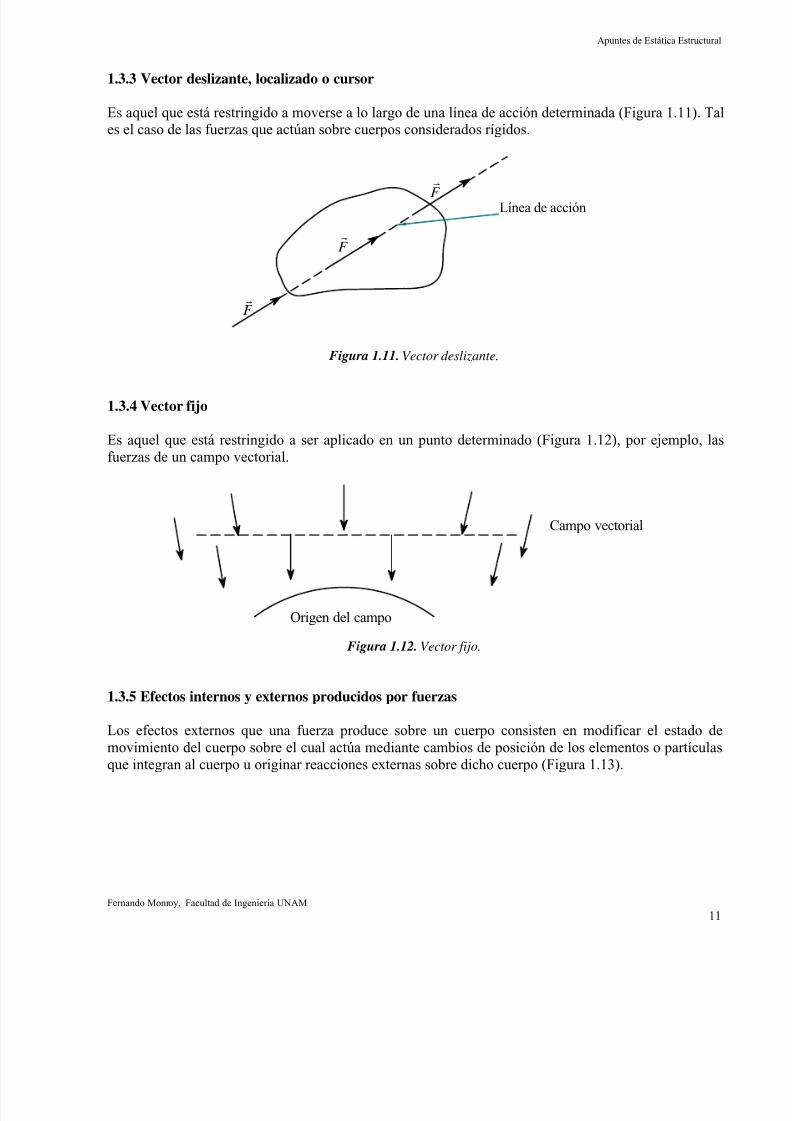
1.3.3 Vector deslizante, localizado o cursor
Es aquel que está restringido a moverse a lo largo de una línea de acción determinada (Figura 1.11). Tales el caso de las fuerzas que actúan sobre cuerpos considerados rígidos.
Línea de acción
F r
F r
F r
Figura 1.11. Vector deslizante.
1.3.4 Vector fijo
Es aquel que está restringido a ser aplicado en un punto determinado (Figura 1.12), por ejemplo, las
fuerzas de un campo vectorial.
Origen del campo
Campo vectorial
Figura 1.12. Vector fijo.
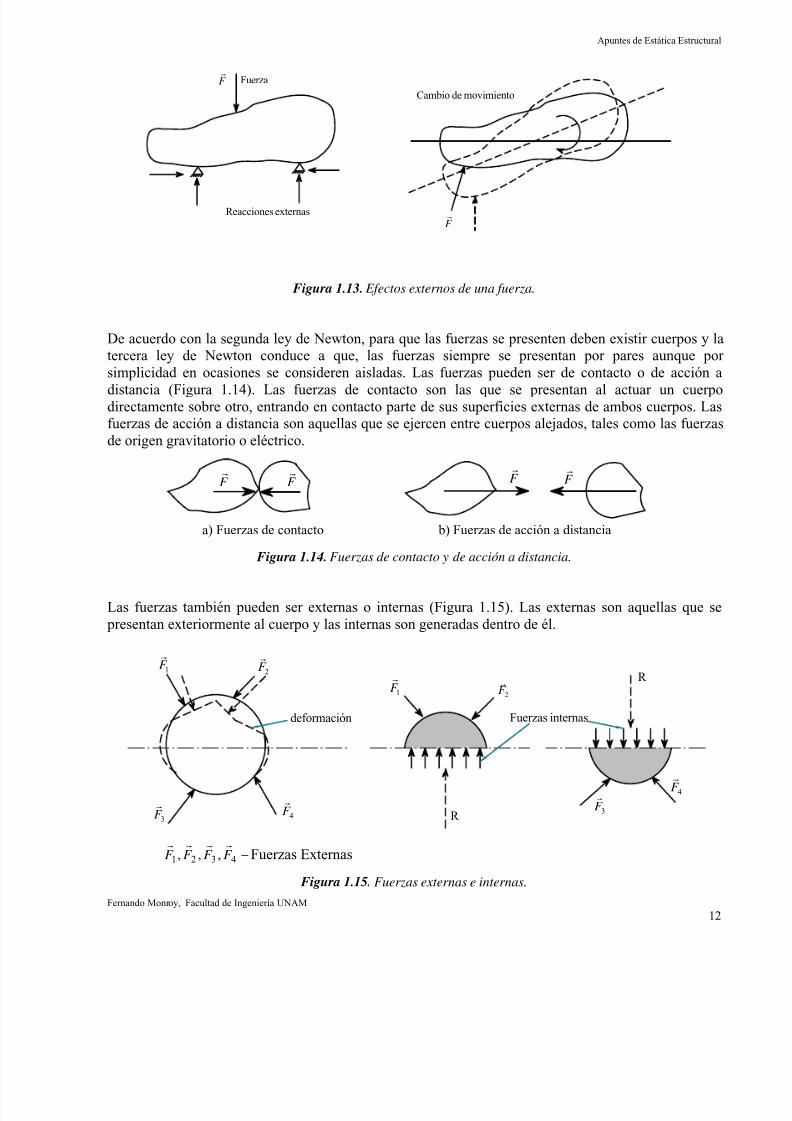
1.3.5 Efectos internos y externos producidos por fuerzas
Los efectos externos que una fuerza produce sobre un cuerpo consisten en modificar el estado de
movimiento del cuerpo sobre el cual actúa mediante cambios de posición de los elementos o partículasque integran al cuerpo u originar reacciones externas sobre dicho cuerpo (Figura 1.13).
Fernando Monroy, Facultad de Ingeniería UNAM
11
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 19/322
Apuntes de Estática Estructural
Cambio de movimiento
Fuerza
Reacciones externas
F r
F r
Figura 1.13. Efectos externos de una fuerza.
De acuerdo con la segunda ley de Newton, para que las fuerzas se presenten deben existir cuerpos y latercera ley de Newton conduce a que, las fuerzas siempre se presentan por pares aunque por
simplicidad en ocasiones se consideren aisladas. Las fuerzas pueden ser de contacto o de acción adistancia (Figura 1.14). Las fuerzas de contacto son las que se presentan al actuar un cuerpo
directamente sobre otro, entrando en contacto parte de sus superficies externas de ambos cuerpos. Lasfuerzas de acción a distancia son aquellas que se ejercen entre cuerpos alejados, tales como las fuerzas
de origen gravitatorio o eléctrico.
F r
F r
F r
F r
a) Fuerzas de contacto b) Fuerzas de acción a distancia
Figura 1.14. Fuerzas de contacto y de acción a distancia.
Las fuerzas también pueden ser externas o internas (Figura 1.15). Las externas son aquellas que se
presentan exteriormente al cuerpo y las internas son generadas dentro de él.
deformación Fuerzas internas
R
R
3F r
1F r
4F r
2F r
3F r
4F r
2F r
1F r
−4321 ,,, F F F F
rrrr
Fuerzas Externas
Figura 1.15. Fuerzas externas e internas.
Fernando Monroy, Facultad de Ingeniería UNAM
12
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 20/322
Apuntes de Estática Estructural
Las deformaciones son también efectos internos de las fuerzas sobre un cuerpo, aclarando que, estas y
las fuerzas internas, si dependen de la localización de las fuerzas externas a lo largo de su línea de
acción. Por ejemplo, los desplazamientos producidos por el cambio de forma generado debido a laaplicación de fuerzas, en el caso de una estructura dependerán del tipo y lugar de aplicación de las
fuerzas que sobre ella actúen.
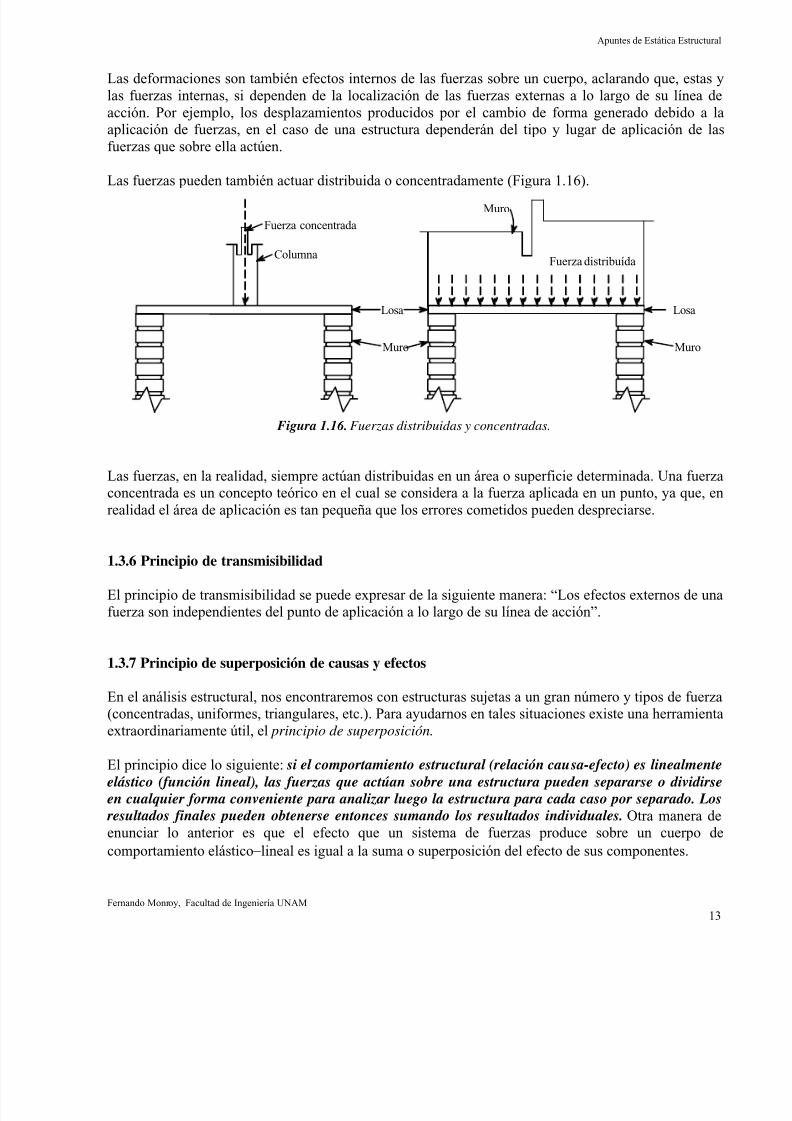
Las fuerzas pueden también actuar distribuida o concentradamente (Figura 1.16).
Fuerza distribuída
Losa
Muro
Fuerza concentrada
Columna
Losa
Muro
Muro
Figura 1.16. Fuerzas distribuidas y concentradas.
Las fuerzas, en la realidad, siempre actúan distribuidas en un área o superficie determinada. Una fuerzaconcentrada es un concepto teórico en el cual se considera a la fuerza aplicada en un punto, ya que, en
realidad el área de aplicación es tan pequeña que los errores cometidos pueden despreciarse.
1.3.6 Principio de transmisibilidad
El principio de transmisibilidad se puede expresar de la siguiente manera: “Los efectos externos de unafuerza son independientes del punto de aplicación a lo largo de su línea de acción”.
1.3.7 Principio de superposición de causas y efectos
En el análisis estructural, nos encontraremos con estructuras sujetas a un gran número y tipos de fuerza(concentradas, uniformes, triangulares, etc.). Para ayudarnos en tales situaciones existe una herramienta
extraordinariamente útil, el principio de superposición.
El principio dice lo siguiente: si el comportamiento estructural (relación causa-efecto) es linealmente
elástico (función lineal), las fuerzas que actúan sobre una estructura pueden separarse o dividirse
en cualquier forma conveniente para analizar luego la estructura para cada caso por separado. Los
resultados finales pueden obtenerse entonces sumando los resultados individuales. Otra manera deenunciar lo anterior es que el efecto que un sistema de fuerzas produce sobre un cuerpo de
comportamiento elástico−lineal es igual a la suma o superposición del efecto de sus componentes.
Fernando Monroy, Facultad de Ingeniería UNAM
13
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 21/322
Apuntes de Estática Estructural
El principio de superposición, cuando es válido, se puede aplicar no sólo a reacciones (fuerzas en los
apoyos), sino también a fuerzas internas, deformaciones y desplazamientos.
Así, por ejemplo, si en una estructura tenemos diferentes tipos de fuerzas actuando sobre ella, para
facilitar el cálculo de los efectos producidos por las fuerzas es posible hacer el análisis por separado de
cada fuerza sobre la estructura y al final sumar algebraicamente las magnitudes de los efectos; por otro
lado, también pueden obtenerse fuerzas resultantes de los diferentes tipos de cargas y hacer un cálculode los efectos con todas las fuerzas resultantes actuando sobre la estructura.
A
L
R AX
A
R AY
B
RBY
+
R AX
A
R AY
L
B
+
RBY
A
R AY
B
L
C
R AX
B
RBY
A
R AX
R AY
A
=
L
CB
RBY
B
Para comprender más claramente la idea anterior, en la Figura 1.17 se muestra una viga bajo la acciónde una carga con una ley de distribución particular. En este caso es posible descomponer la fuerza en
varias más sencillas para analizar y obtener las resultantes de cada una de ellas, de esta manera será
mucho más práctico obtener, por ejemplo, las reacciones en los apoyos.
Figura 1.17. Descomposición de una carga.
En la figura anterior podemos observar que no es sencillo determinar fácilmente la magnitud y posición
de la fuerza resultante, para esto, se divide la carga en otras tres más sencillas y así tener una resultante
para cada una de ellas.
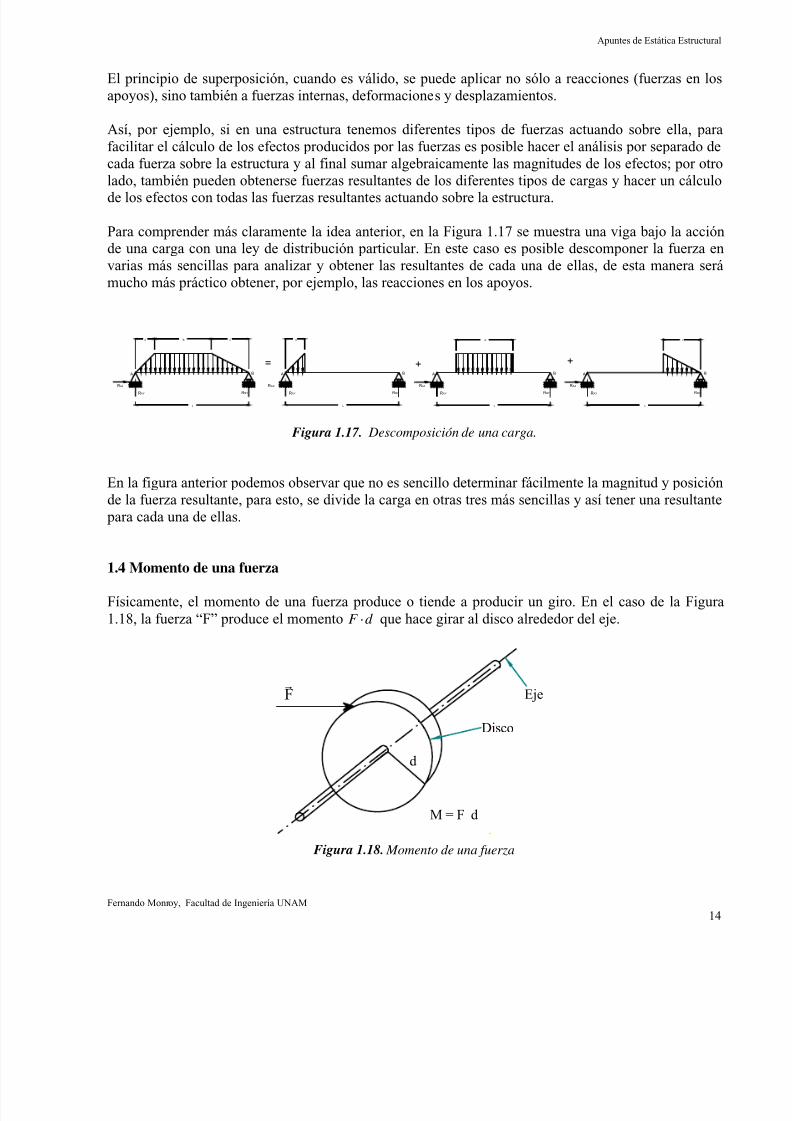
1.4 Momento de una fuerza
Físicamente, el momento de una fuerza produce o tiende a producir un giro. En el caso de la Figura
1.18, la fuerza “F” produce el momento d F ⋅ que hace girar al disco alrededor del eje.
Eje
Disco
d
M = F d .
Fr
Figura 1.18. Momento de una fuerza
Fernando Monroy, Facultad de Ingeniería UNAM
14

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 22/322
Apuntes de Estática Estructural
(1.5)d F M =
Obsérvese que una fuerza paralela al eje del disco no produce giro de este, puesto que no produce
momento respecto a dicho eje.
En una forma más estricta el momento de una fuerza F r
respecto a un punto “o” se define como el
producto vectorial (producto cruz) de los vectores r F r
r
y (Figura 1.19), siendo un vector de posiciónque va desde el punto con respecto al cual se evalúa el momento a cualquier punto contenido en la línea
de acción de la fuerza , es decir:
r r
F r
X
Z
0
Y
o M r
jr
ir
r r
F r
k r
Figura 1.19. Momento de la fuerza F
r
con respecto al punto “O”
F r M o
r
r
r
×= (1.6)
jik rr
r
×=
(1.7)
La dirección de 0 M r
es perpendicular al plano formado por r r
y F r
el sentido estará de acuerdo con la
convención que se elija, y la magnitud es el área del paralelogramo formado por r r
y (Figura 1.20).F r
d F A M ⋅==0
r
(1.8)
Fernando Monroy, Facultad de Ingeniería UNAM
15
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 23/322
Apuntes de Estática Estructural
X
Y
A/2
Z
A/2
A/2
A0
o M r
jr
r r
F r
k
r
ir
F r
F r
F r
F r
4 0 d 3 3d
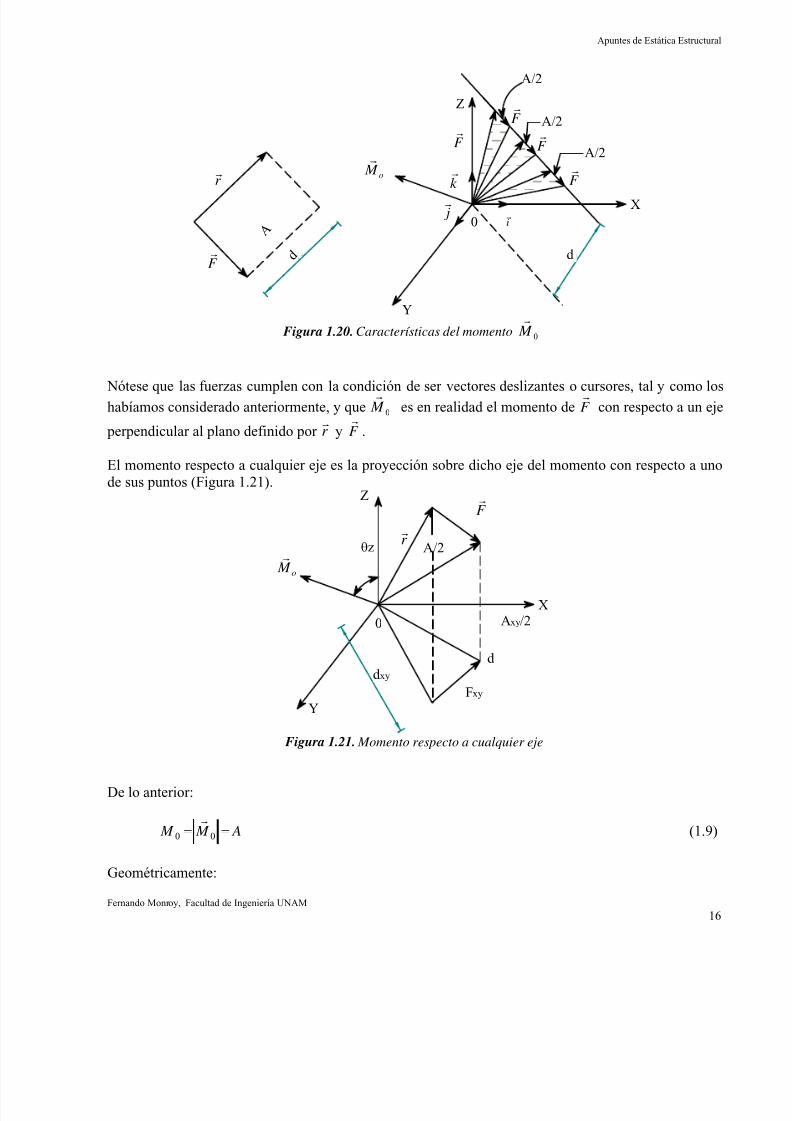
Figura 1.20. Características del momento 0 M r
Nótese que las fuerzas cumplen con la condición de ser vectores deslizantes o cursores, tal y como los
habíamos considerado anteriormente, y que 0 M r
es en realidad el momento de con respecto a un eje
perpendicular al plano definido por
F r
r r
y F r
.
El momento respecto a cualquier eje es la proyección sobre dicho eje del momento con respecto a unode sus puntos (Figura 1.21).
X
d
Y
0
A/2θz
Z
Axy/2
Fxy
o M r
r r
F r
4 6 d xy
Figura 1.21. Momento respecto a cualquier eje
De lo anterior:
A M M == 00
r
(1.9)
Geométricamente:
Fernando Monroy, Facultad de Ingeniería UNAM
16
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 24/322
Apuntes de Estática Estructural
A xy = Acos φ z (1.10)
Y por definición:
M z = M 0 K (1.11)
M z = M 0 cos φ z (1.12)
Por lo que:
M z = Acos φ z (1.13)
Y por lo consiguiente:
M z = A xy (1.14)
Puesto que:
A xy = F xyd xy (1.15)
Resulta que:
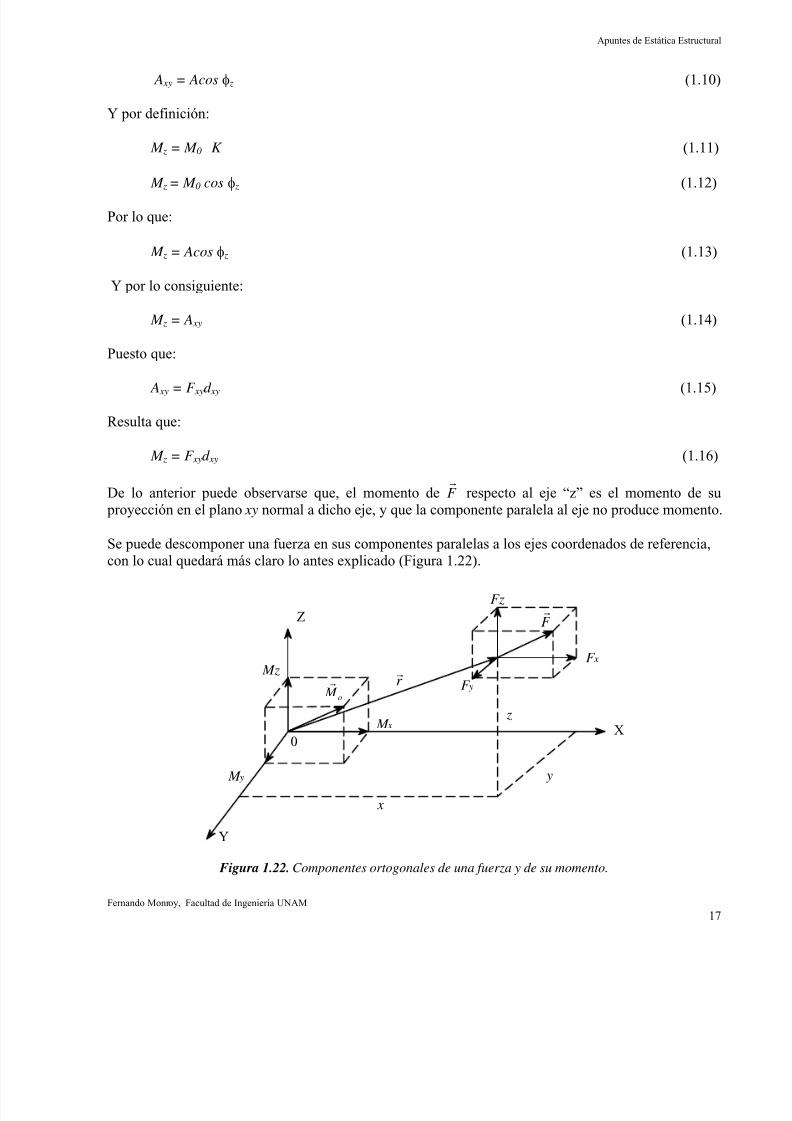
M z = F xyd xy (1.16)
De lo anterior puede observarse que, el momento de F r
respecto al eje “z” es el momento de su proyección en el plano xy normal a dicho eje, y que la componente paralela al eje no produce momento.
Se puede descomponer una fuerza en sus componentes paralelas a los ejes coordenados de referencia,
con lo cual quedará más claro lo antes explicado (Figura 1.22).
M x
x
M y
Y
y
zX
Z
F y
0
Mz
Fz
F x
o M r r
r
F r
Figura 1.22. Componentes ortogonales de una fuerza y de su momento.
Fernando Monroy, Facultad de Ingeniería UNAM
17

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 25/322
Apuntes de Estática Estructural
F r M
M M M M
z y xr
F F F F
z y x
z y x
r
r
r
r
r
v
×=0
0 ),,(
),,(
),,(
Desarrollando el producto cruz tenemos que:
)()()(0 x y x z y z
z y x
yF xF k zF xF j zF yF i
F F F
z y x
k ji
M −+−−−==r
rrr
(1.17)
k yF xF j xF zF i zF yF M x y z x y z
rrrr
)()()(0 −+−+−=
(1.18)
(1.19)k M j M i M M z y x
rrrr
++=0
Por lo tanto.
(1.20) zF yF M y z x −=
xF zF M z x y −=
(1.21)
yF xF M x y z −= (1.22)
Se puede obtener el momento con respecto a cualquier eje que pase por “O” asociando dicho eje a un
vector unitario er
y obteniendo la proyección de 0 M r
dicho eje (Figura 1.23).
Fernando Monroy, Facultad de Ingeniería UNAM
18

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 26/322
Apuntes de Estática Estructural
X
d
Y
0
Z
Fxy
Plano de la fuerza
o M
r
F r
er
er
F r
aaraleloE e
r r
Figura 1.23. Momento de una fuerza.
e M M er
r
,0= (1.23)
1=er
Para el caso del eje z:
k M M z
rr
,0= (1.24)
Si el eje es paralelo a ,F r
0=e M r
puesto que está en el plano de la fuerza que es perpendicular a .0 M r
Analíticamente las características de un cursor representativo de una fuerza, pueden expresarse por el
vector libre que nos dará la magnitud, dirección y sentido de la fuerza, y el vectorF r
0 M r
nos dará su
línea de acción.
La pareja ordenada ( ,F r
0 M r
) se denomina coordenadas vectoriales o pluckerianas de las fuerzas. Es
decir, para caracterizar una fuerza es necesario conocer su magnitud, dirección y sentido ( F r
) y su
momento con respecto a un punto “0” ( 0 M r
) siendo esto último equivalente a conocer la posición de su
línea de acción o soporte que es la recta de ecuación (Figura 1.24):
(1.25)0)( =×− F r r P
r
rr
0 M F r rr
r
=× (1.26)
Fernando Monroy, Facultad de Ingeniería UNAM
19
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 27/322
Apuntes de Estática Estructural
X
Y
0
Z
r r
Pr r
r r
F r
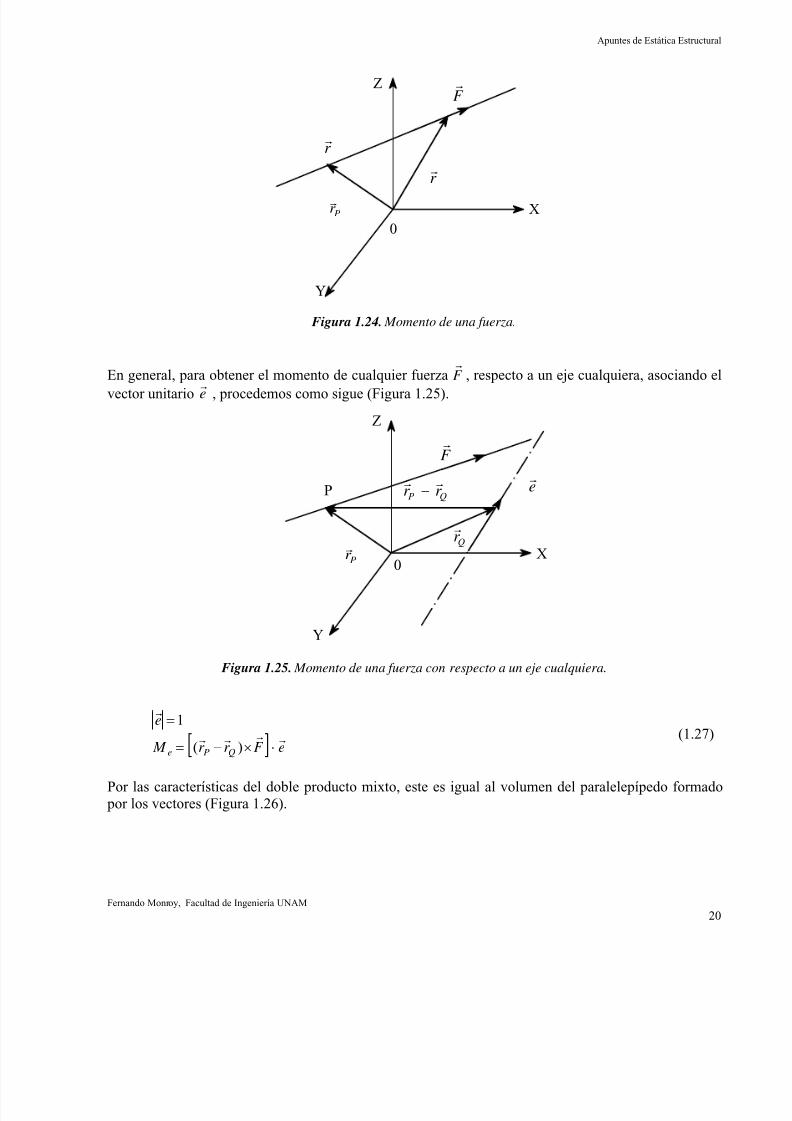
Figura 1.24. Momento de una fuerza.
En general, para obtener el momento de cualquier fuerza F
r
, respecto a un eje cualquiera, asociando elvector unitario e
r
, procedemos como sigue (Figura 1.25).
P
X
Y
0
Z
QP r r rr
−
P
r r
er
F r
Qr r
Figura 1.25. Momento de una fuerza con respecto a un eje cualquiera.
[ eF r r M
e
QPe
r
r
rr
]
r
⋅×−=
=
)(
1 (1.27)
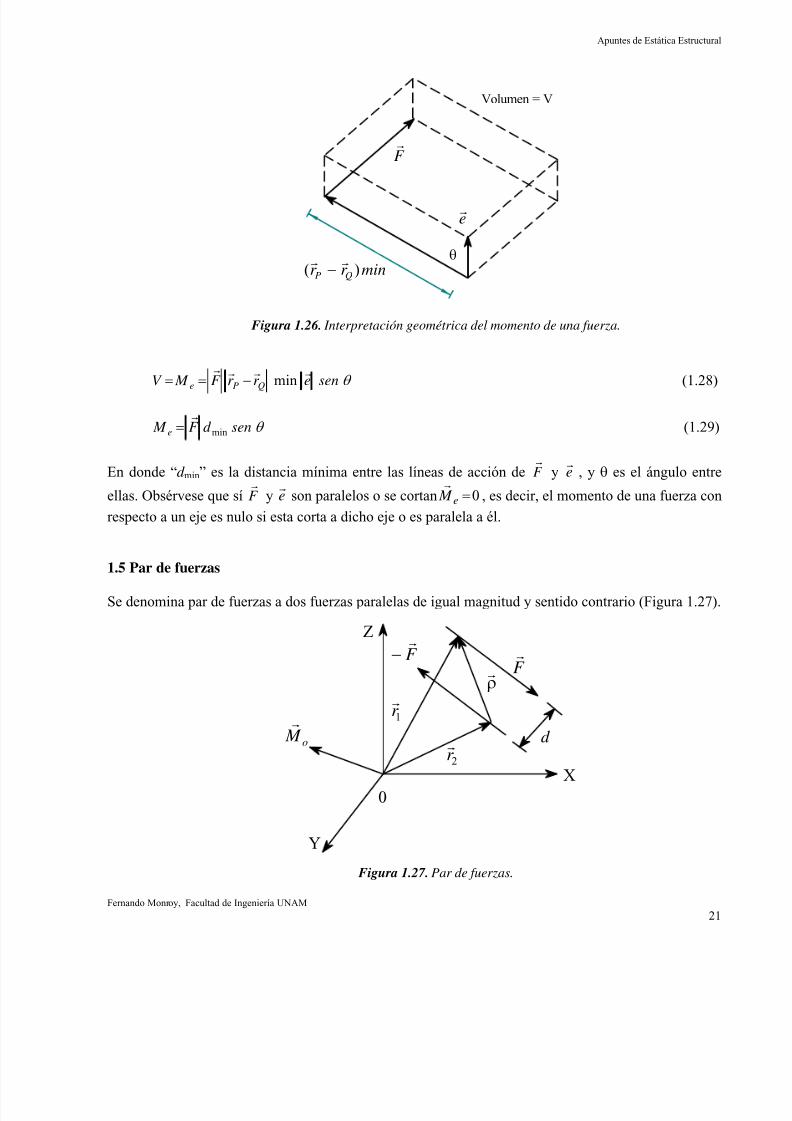
Por las características del doble producto mixto, este es igual al volumen del paralelepípedo formado por los vectores (Figura 1.26).
Fernando Monroy, Facultad de Ingeniería UNAM
20
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 28/322
Apuntes de Estática Estructural
θ
F r
er
Volumen = V
minr r QP )( rr
−
5 7
Figura 1.26. Interpretación geométrica del momento de una fuerza.
θ sener r F M V QPe
rrr
r
min−== (1.28)
θ send F M e min
r
= (1.29)
En donde “d min” es la distancia mínima entre las líneas de acción de F r
y er
, y θ es el ángulo entre
ellas. Obsérvese que sí y eF r
r
son paralelos o se cortan 0=e M r
, es decir, el momento de una fuerza con
respecto a un eje es nulo si esta corta a dicho eje o es paralela a él.
1.5 Par de fuerzas
Se denomina par de fuerzas a dos fuerzas paralelas de igual magnitud y sentido contrario (Figura 1.27).
X
d
Y
0
Z
o M r
F rF
r
−
1r r
2r r
ρr
Figura 1.27. Par de fuerzas.
Fernando Monroy, Facultad de Ingeniería UNAM
21

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 29/322
Apuntes de Estática Estructural
=0 M r
Momento del par respecto a 0
F r F r M r
r
r
r
r
−×+×= 210 (1.30)
F r F r
r
r
r
r
×−×= 21
( ) F r r M r
rr
r
×−= 210 puesto que : )( 21 r r rr
− = ρ r
Entonces
F M r
r
r
×= ρ 0
(1.31)
Además observando la Figura 1.28 se tiene que:
d
A
F
F
A
F
F
AF
F
Figura 1.28. Momento de un par de fuerzas.
Fd M =0 (1.32)
En donde d = brazo del par
El momento tiene por magnitud el producto de la magnitud de las fuerzas por el brazo del par, su
dirección es normal al plano del par y el sentido estará de acuerdo con la convención elegida. Puede
verse que el momento de un par es un vector libre, tal y como se demuestra a continuación (Figura1.29).
Fernando Monroy, Facultad de Ingeniería UNAM
22

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 30/322
Apuntes de Estática Estructural
X'
d
Y'
0'
Z'
X
Y
0
Z
F r
F r
−
1r r
2r r
ρ
r '2r r
F r
'1r r
Figura 1.29. Momento de un par de fuerzas (vector libre).
Momento del par respecto a 0’:
F M
F r r
F r F r
F r F r M
r
r
r
r
rr
r
r
r
r
r
r
r
r
r
×ρ=
×−=
×−×=
−×+×=
'0
21
21
210
)(
)(
Ya que:
F x M r
r
r
ρ =0
Por lo tanto:
'00 M M rr
= (Vector libre) (1.33)
Las maneras de indicar un par de fuerzas se muestran en la Figura 1.30.
Fernando Monroy, Facultad de Ingeniería UNAM
23

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 31/322
Apuntes de Estática Estructural
X
M
0
Y
M
X
M
0
Z
M
Y
Figura 1.30. Diversas maneras de indicar un par de fuerzas.
Dos pares son iguales siempre y cuando su magnitud, dirección y sentido sean iguales (Figura 1.31).
sí F 21 M M rr
= 1 d 1 = F 2 d 2 y además son iguales sus direcciones y sentidos.
Y
d 2
X0
Z
d 1
1 M r
1F r
1F r
−
2F r
2F r
−
2 M r
9
9
Figura 1.31. Pares iguales.
Fernando Monroy, Facultad de Ingeniería UNAM
24
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 32/322
Apuntes de Estática Estructural
ESTUDIO DE L OS
SISTEMAS DE FUERZAS
2.1 Sistema de fuerzas
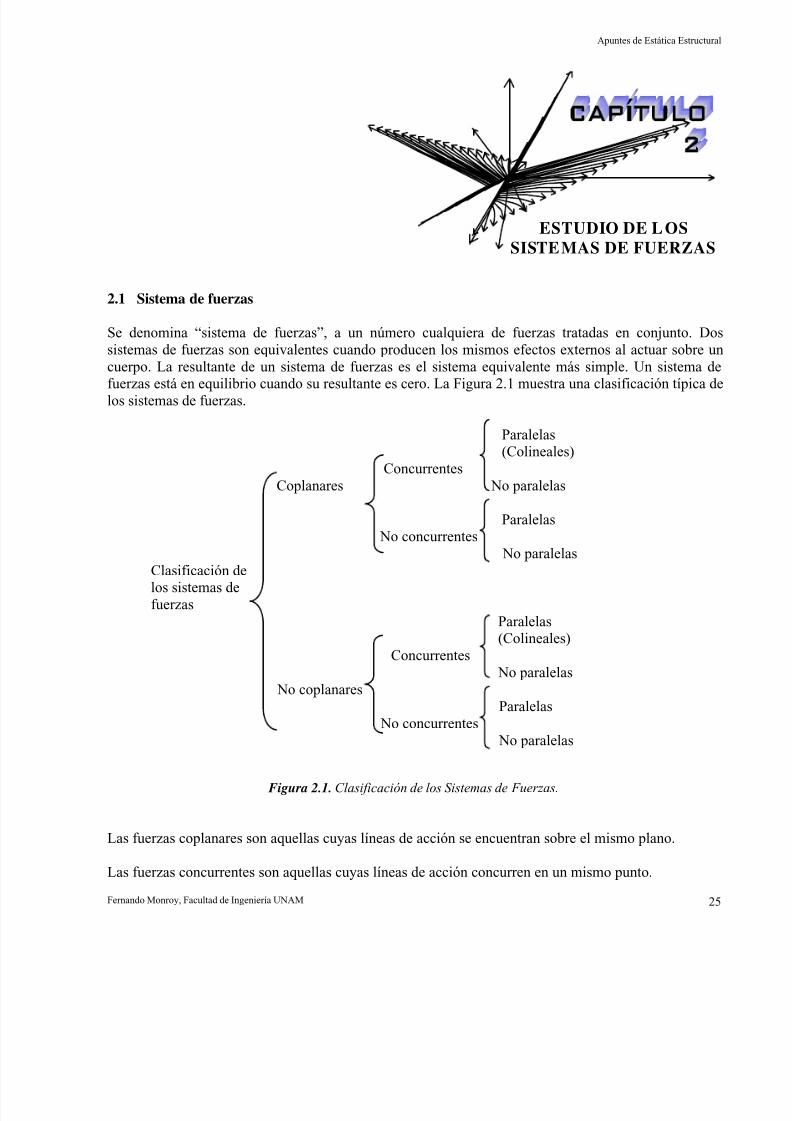
Se denomina “sistema de fuerzas”, a un número cualquiera de fuerzas tratadas en conjunto. Dos
sistemas de fuerzas son equivalentes cuando producen los mismos efectos externos al actuar sobre un
cuerpo. La resultante de un sistema de fuerzas es el sistema equivalente más simple. Un sistema defuerzas está en equilibrio cuando su resultante es cero. La Figura 2.1 muestra una clasificación típica de
los sistemas de fuerzas.
Paralelas(Colineales)
Concurrentes
Coplanares No paralelas
Fernando Monroy, Facultad de Ingeniería UNAM 25
Paralelas No concurrentes
No paralelas
Clasificación delos sistemas de
fuerzas
Paralelas(Colineales)
Concurrentes
No paralelas
No coplanaresParalelas
No concurrentes
No paralelas
Figura 2.1. Clasificación de los Sistemas de Fuerzas.
Las fuerzas coplanares son aquellas cuyas líneas de acción se encuentran sobre el mismo plano.
Las fuerzas concurrentes son aquellas cuyas líneas de acción concurren en un mismo punto.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 33/322
Apuntes de Estática Estructural
Fuerzas paralelas son aquellas cuyas líneas de acción son paralelas, siendo colineales cuando estas
coinciden.
2.1.1 Resultante de una fuerza y un par coplanares
Sean F y M una fuerza y un par coplanares (Figura 2.2).
F
aM
F
a bFF a
d
F
.. . .
F
M d =
Figura 2.2. Fuerza y par coplanares.
Es decir, al sumarle a la fuerza F (que pasa por “a”) el par M, esta se traslada a una posición paralela
(pasando por “b”).
2.1.2 Resultante de una fuerza y un par cualquiera
Con relación a la Figura 2.3, tenemos que:
aa b
Plano de la fuerzas
C
a
II
b M N'
M L M r
a bML
C
M L
Torsor N M
r
M
r
T M r
F r
I
F
M N '
F
M N
F r
F
r
F r
Figura 2.3. Resultante de una fuerza y un par.
F
r
= Fuerza en el plano I
T M r
= Componente tangencial en el plano I
N M r
= Componente normal al plano I (par de fuerzas en el plano I)
M r
= Par cualquiera
L M r
= Componente paralela al plano II
N M r
= Componente normal al plano II (par de fuerzas en el plano II)
Fernando Monroy, Facultad de Ingeniería UNAM 26

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 34/322
Apuntes de Estática Estructural
Es decir, al sumarle a la fuerza F r
(pasando por “a”) el par M r
, esta se traslada (pasando por “c”)
siendo la resultante el torsor constituido por F r
(pasando por “c” y el par L M r
).
2.1.3 Teorema de Varignon
“El momento de la resultante es igual a la suma de los momentos de las fuerzas componentes delsistema”.
Esto queda implicado al obtener la resultante de un sistema en general, pero lo verificaremos para dosfuerzas concurrentes (Figura 2.4).
Z
X
Y
0
2 F r
1 F r
r
r
Rr
Figura 2.4. Fuerzas concurrentes.
Sumando los momentos de las fuerzas del sistema:
)( 210
210
F F r M Σ
F r F r M Σ rr
r
r
r
r
r
r
r
+×=
×+×=
Pero:
(2.1)
Rr M Σ
R F F r
r
r
rrr
×=
=+
0
21
2.1.4 Resultante de un sistema de fuerzas en general
Sea el sistema de fuerzas (i = 1, 2, 3,...,n) y de paresi F r
j M r
(j = 1, 2, 3,...,m) (Figura 2.5), cada una de
las fuerzas puede trasladarse al origen “0” introduciendo un par de transporte ir i F r
r
x i F r
, y los pares
Fernando Monroy, Facultad de Ingeniería UNAM 27

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 35/322
Apuntes de Estática Estructural
j M r
como vectores libres también pueden trasladarse a dicho punto, por lo que el sistema exterior
puede expresarse como sigue y esto a su vez es igual a una resultante de todas las fuerzas.
Y
Z
Torsor
X0
Y
X
Y
0
Z
X
0
Z
X0
Y
Z
j M r
z M r
1 F r
z F r
2r r
1r r
n F r
m M r
nr r m M
r
n F r
1 F r
1 M
r
2 F r
22 x F r r
r
z M r
11 x F r r
r
nn F r r
r
x
L M r
Rr
∑+∑===
m
j ji
n
iiot M F xr M
11
rr
r
r
Figura 2.5. Sistema general de fuerzas.
Es decir, la resultante de un sistema de fuerzas en general es un torsor. En casos particulares dicharesultante es sólo una fuerza o un par. Puede también concluirse que para obtener la resultante de un
sistema de fuerzas en general, se requiere de dos ecuaciones vectoriales las cuales son equivalentes a 6
ecuaciones escalares como se expresa a continuación:
F Σ F Rnr r r
Fernando Monroy, Facultad de Ingeniería UNAM 28
ii =∑=
z z
y y
x x
F Σ R
F Σ R
Σ F R
=
=
=
== 11 ji
=1
(2.2)
∑=∑+∑= 0 M M F xr M j
m
i
n
iot
rrr
r
r
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 36/322
Apuntes de Estática Estructural
z z
y y
x x
M Σ M
M Σ M
M Σ M
=
=
=
0
0
0
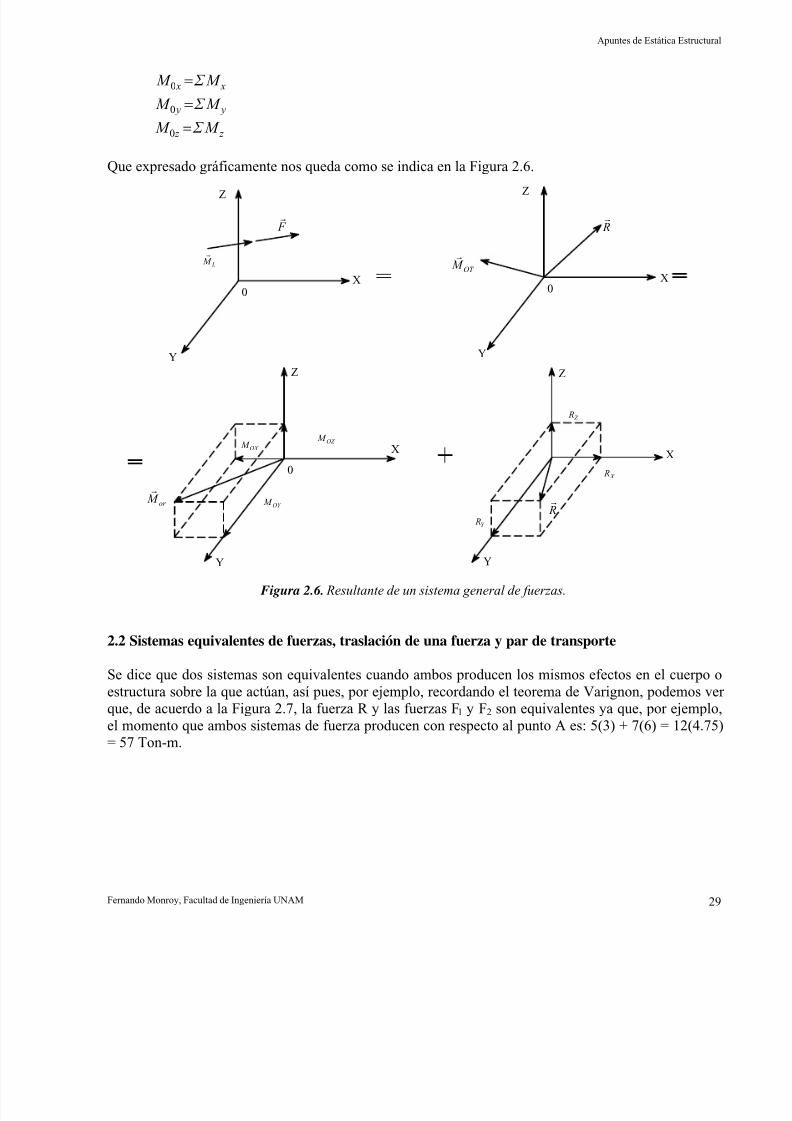
Que expresado gráficamente nos queda como se indica en la Figura 2.6.
Z
X0
Y
X
0
Y
Z
X
Y
Z
X0
Y
Z
Rr
OT M r
or M r
Rr
F r
L M r
OZ M OX M
OY M
Y R
X R
Z R
Figura 2.6. Resultante de un sistema general de fuerzas.
2.2 Sistemas equivalentes de fuerzas, traslación de una fuerza y par de transporte
Se dice que dos sistemas son equivalentes cuando ambos producen los mismos efectos en el cuerpo o
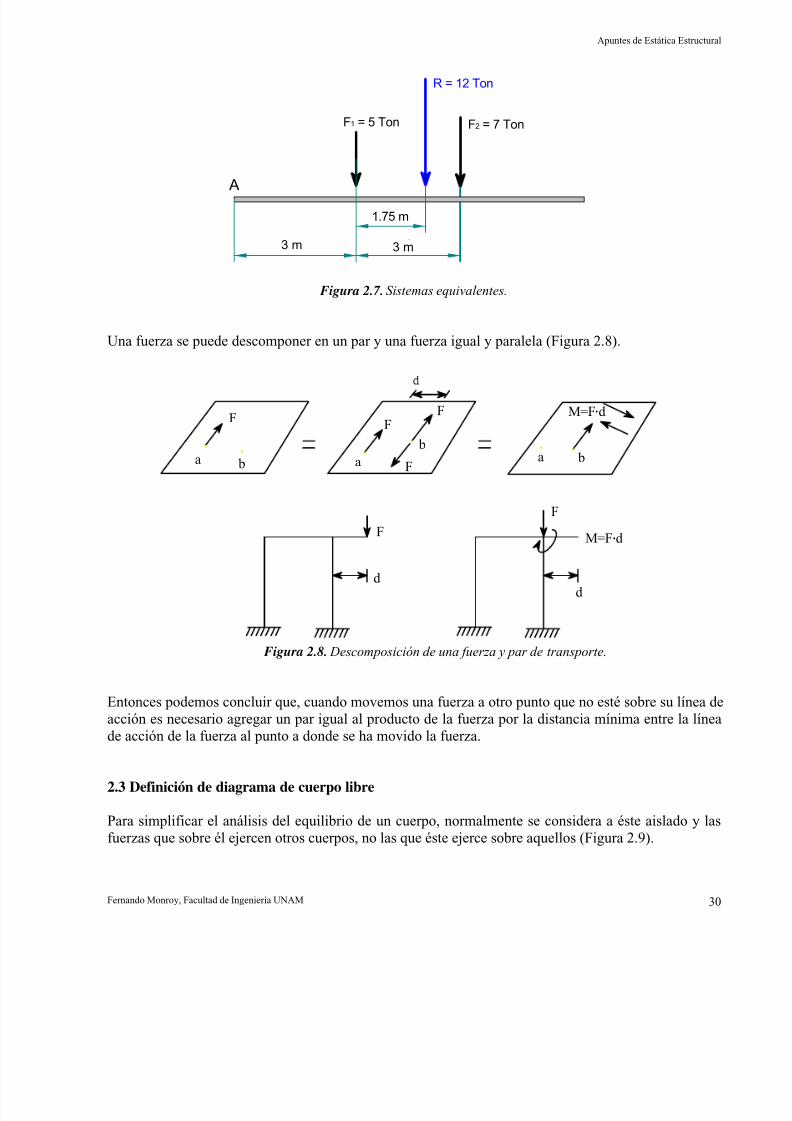
estructura sobre la que actúan, así pues, por ejemplo, recordando el teorema de Varignon, podemos verque, de acuerdo a la Figura 2.7, la fuerza R y las fuerzas F1 y F2 son equivalentes ya que, por ejemplo,
el momento que ambos sistemas de fuerza producen con respecto al punto A es: 5(3) + 7(6) = 12(4.75)= 57 Ton-m.
Fernando Monroy, Facultad de Ingeniería UNAM 29
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 37/322
Apuntes de Estática Estructural
F1 = 5 Ton
0
R = 12 Ton
F2 = 7 Ton
0
A
10
3 m
1.75 m
3 m
Figura 2.7. Sistemas equivalentes.
Una fuerza se puede descomponer en un par y una fuerza igual y paralela (Figura 2.8).
F
a b
M=F d
a b
.
F
F
d
F
a F
b
F
d
M=F d .
. . .. . .
Figura 2.8. Descomposición de una fuerza y par de transporte.
Entonces podemos concluir que, cuando movemos una fuerza a otro punto que no esté sobre su línea de
acción es necesario agregar un par igual al producto de la fuerza por la distancia mínima entre la línea
de acción de la fuerza al punto a donde se ha movido la fuerza.
2.3 Definición de diagrama de cuerpo libre
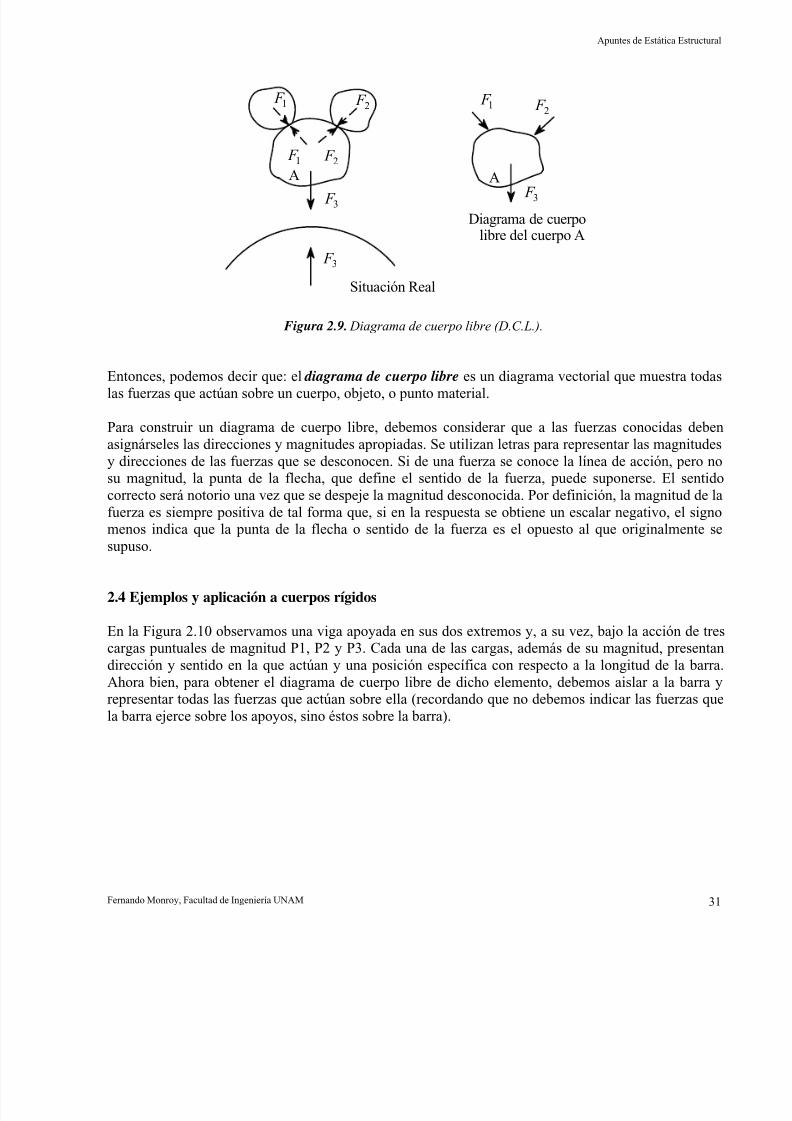
Para simplificar el análisis del equilibrio de un cuerpo, normalmente se considera a éste aislado y las
fuerzas que sobre él ejercen otros cuerpos, no las que éste ejerce sobre aquellos (Figura 2.9).
Fernando Monroy, Facultad de Ingeniería UNAM 30
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 38/322
Apuntes de Estática Estructural
A
Diagrama de cuerpo libre del cuerpo A
A
Situación Real
1 F 2 F
1 F 2 F
3 F
1 F 2 F
3 F
3 F
Figura 2.9. Diagrama de cuerpo libre (D.C.L.).
Entonces, podemos decir que: el diagrama de cuerpo libre es un diagrama vectorial que muestra todaslas fuerzas que actúan sobre un cuerpo, objeto, o punto material.
Para construir un diagrama de cuerpo libre, debemos considerar que a las fuerzas conocidas deben
asignárseles las direcciones y magnitudes apropiadas. Se utilizan letras para representar las magnitudes
y direcciones de las fuerzas que se desconocen. Si de una fuerza se conoce la línea de acción, pero nosu magnitud, la punta de la flecha, que define el sentido de la fuerza, puede suponerse. El sentido
correcto será notorio una vez que se despeje la magnitud desconocida. Por definición, la magnitud de la
fuerza es siempre positiva de tal forma que, si en la respuesta se obtiene un escalar negativo, el signomenos indica que la punta de la flecha o sentido de la fuerza es el opuesto al que originalmente se
supuso.
2.4 Ejemplos y aplicación a cuerpos rígidos
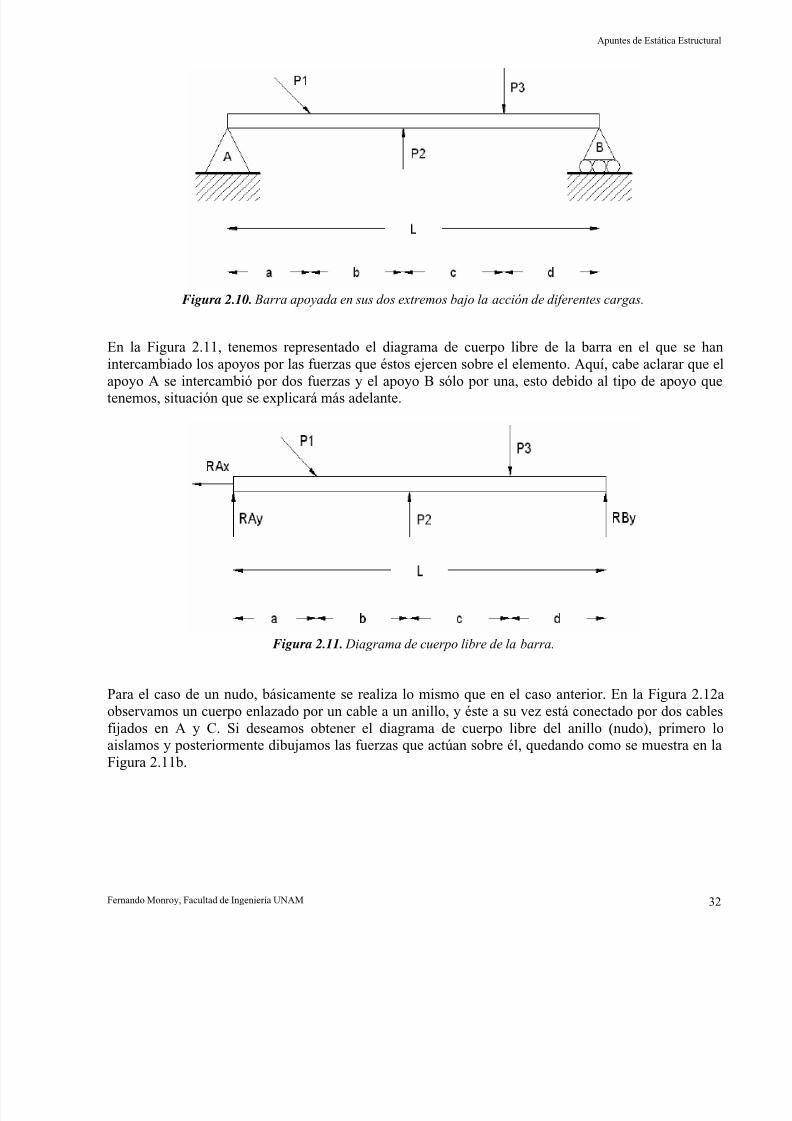
En la Figura 2.10 observamos una viga apoyada en sus dos extremos y, a su vez, bajo la acción de trescargas puntuales de magnitud P1, P2 y P3. Cada una de las cargas, además de su magnitud, presentan
dirección y sentido en la que actúan y una posición específica con respecto a la longitud de la barra.
Ahora bien, para obtener el diagrama de cuerpo libre de dicho elemento, debemos aislar a la barra yrepresentar todas las fuerzas que actúan sobre ella (recordando que no debemos indicar las fuerzas que
la barra ejerce sobre los apoyos, sino éstos sobre la barra).
Fernando Monroy, Facultad de Ingeniería UNAM 31
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 39/322
Apuntes de Estática Estructural
Figura 2.10. Barra apoyada en sus dos extremos bajo la acción de diferentes cargas.
En la Figura 2.11, tenemos representado el diagrama de cuerpo libre de la barra en el que se han
intercambiado los apoyos por las fuerzas que éstos ejercen sobre el elemento. Aquí, cabe aclarar que el
apoyo A se intercambió por dos fuerzas y el apoyo B sólo por una, esto debido al tipo de apoyo quetenemos, situación que se explicará más adelante.
Figura 2.11. Diagrama de cuerpo libre de la barra.
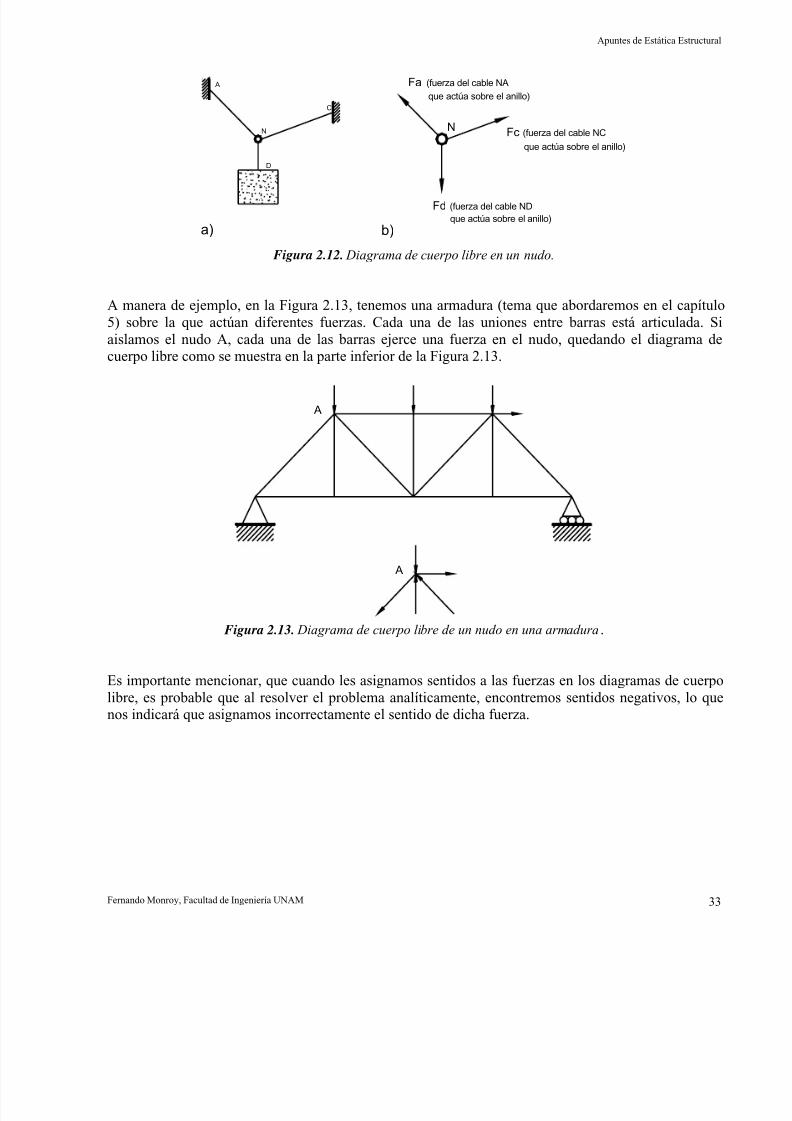
Para el caso de un nudo, básicamente se realiza lo mismo que en el caso anterior. En la Figura 2.12a
observamos un cuerpo enlazado por un cable a un anillo, y éste a su vez está conectado por dos cables
fijados en A y C. Si deseamos obtener el diagrama de cuerpo libre del anillo (nudo), primero lo
aislamos y posteriormente dibujamos las fuerzas que actúan sobre él, quedando como se muestra en laFigura 2.11b.
Fernando Monroy, Facultad de Ingeniería UNAM 32
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 40/322
Apuntes de Estática Estructural
N
A
C
D
N
Fa (fuerza del cable NA
que actúa sobre el anillo)
Fc (fuerza del cable NC
que actúa sobre el anillo)
Fd (fuerza del cable ND
que actúa sobre el anillo)
a) b)
Figura 2.12. Diagrama de cuerpo libre en un nudo.
A manera de ejemplo, en la Figura 2.13, tenemos una armadura (tema que abordaremos en el capítulo
5) sobre la que actúan diferentes fuerzas. Cada una de las uniones entre barras está articulada. Si
aislamos el nudo A, cada una de las barras ejerce una fuerza en el nudo, quedando el diagrama decuerpo libre como se muestra en la parte inferior de la Figura 2.13.
A
A
Figura 2.13. Diagrama de cuerpo libre de un nudo en una armadura.
Es importante mencionar, que cuando les asignamos sentidos a las fuerzas en los diagramas de cuerpo
libre, es probable que al resolver el problema analíticamente, encontremos sentidos negativos, lo quenos indicará que asignamos incorrectamente el sentido de dicha fuerza.
Fernando Monroy, Facultad de Ingeniería UNAM 33

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 41/322
Apuntes de Estática Estructural
PROPIEDADES GEOMÉTRICAS DE SUPERFICIES PLANAS
3.1 Centro de un sistema de fuerzas paralelas.
Consideremos las fuerzas F1 y F2 asociadas a los puntos A y B (Figura 3.1).
Q B A
R
α
α
F 2 F 1
Figura 3.1. Centro de un sistema de fuerzas paralelas.
Tomando en cuenta que, el momento de la resultante R respecto a cualquier punto es igual a la suma delos momentos de las componentes del sistema F 1 y F 2 respecto al mismo punto, se llega a la relación:
QA
QB
F
F =
2
1 (3.1)
Consideremos ahora un giro de la línea AB y con la misma consideración de momentos anterior se llegaa la misma relación en la siguiente forma:
QA
QB
cosQA
cosQB
F
F ==
α
α
2
1 (3.2)
Por lo que puede concluirse que la resultante R de las fuerzas F 1 y F 2 paralelas y asociadas a los puntos A y B, pasa siempre por el punto Q independientemente de su orientación respecto a la línea AB .Fernando Monroy, Facultad de Ingeniería UNAM 34
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 42/322
Apuntes de Estática Estructural
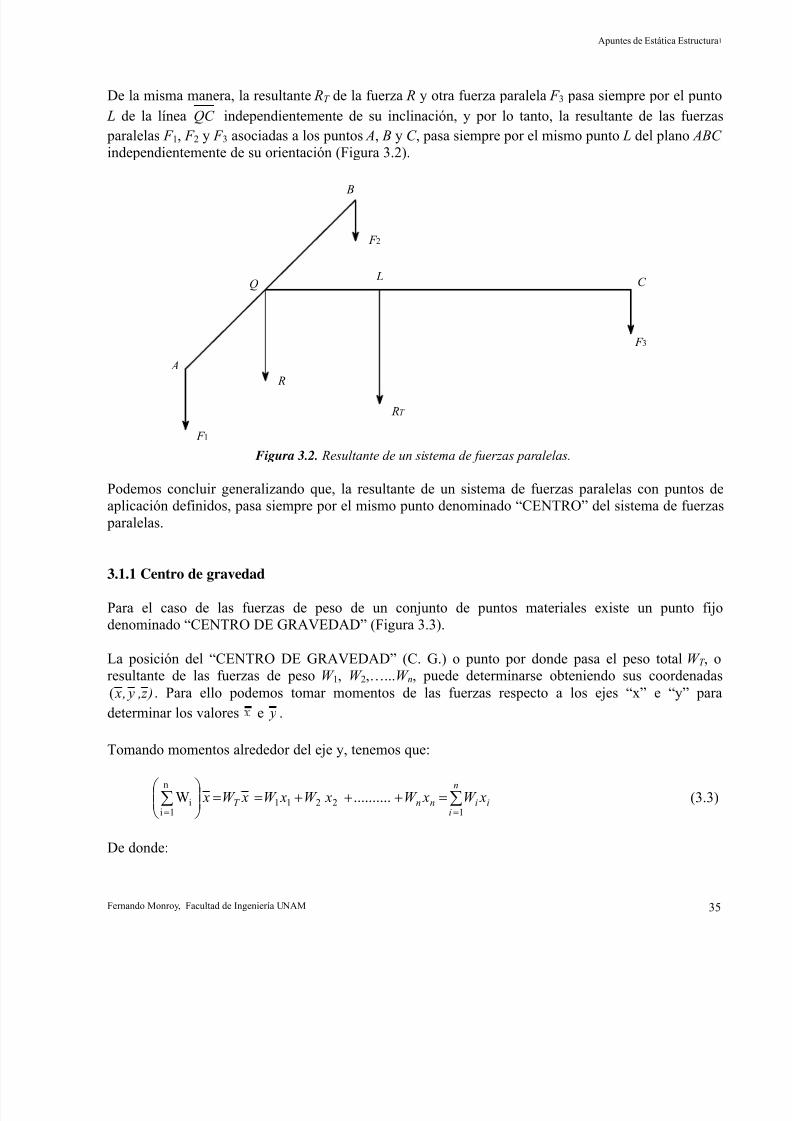
De la misma manera, la resultante RT de la fuerza R y otra fuerza paralela F 3 pasa siempre por el punto
L de la línea QC independientemente de su inclinación, y por lo tanto, la resultante de las fuerzas paralelas F 1, F 2 y F 3 asociadas a los puntos A, B y C , pasa siempre por el mismo punto L del plano ABC independientemente de su orientación (Figura 3.2).
Q
B
A
R
C L
F 2
RT
F 3
F 1 Figura 3.2. Resultante de un sistema de fuerzas paralelas.
Podemos concluir generalizando que, la resultante de un sistema de fuerzas paralelas con puntos deaplicación definidos, pasa siempre por el mismo punto denominado “CENTRO” del sistema de fuerzas paralelas.
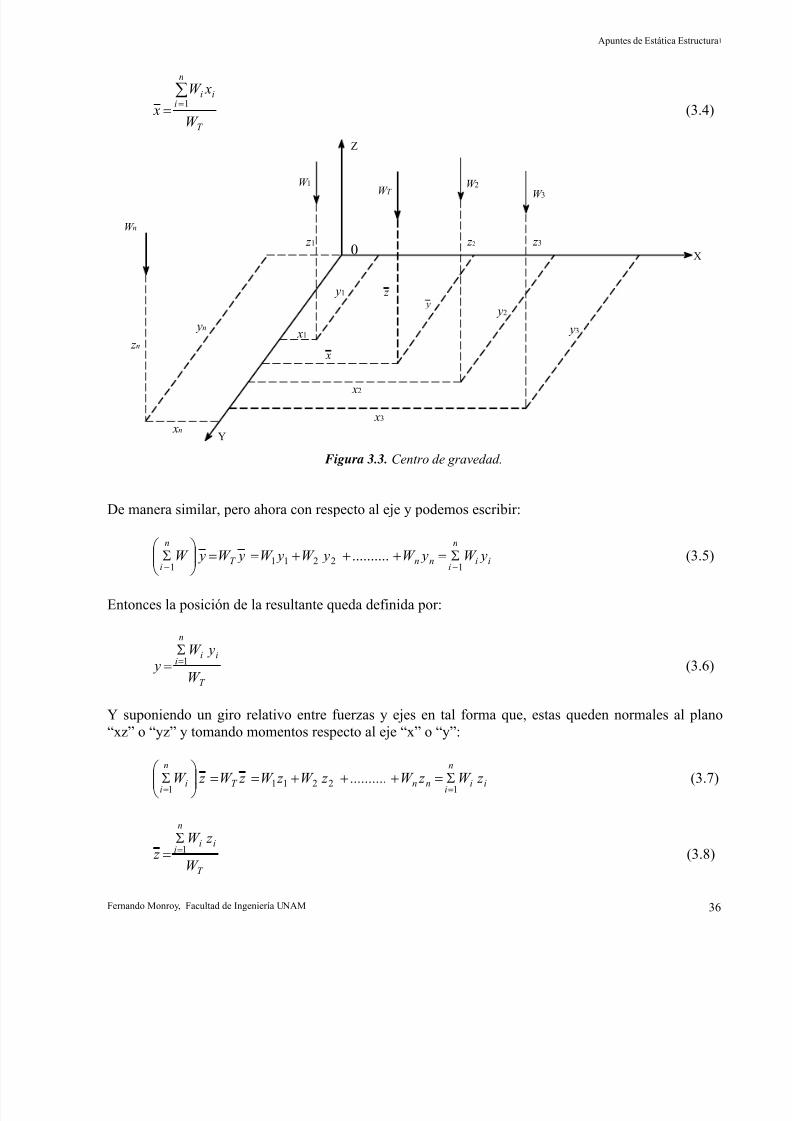
3.1.1 Centro de gravedad
Para el caso de las fuerzas de peso de un conjunto de puntos materiales existe un punto fijodenominado “CENTRO DE GRAVEDAD” (Figura 3.3).
La posición del “CENTRO DE GRAVEDAD” (C. G.) o punto por donde pasa el peso total W T , oresultante de las fuerzas de peso W 1, W 2,…...W n, puede determinarse obteniendo sus coordenadas
) z , y , x( . Para ello podemos tomar momentos de las fuerzas respecto a los ejes “x” e “y” paradeterminar los valores ye .
Tomando momentos alrededor del eje y, tenemos que:
∑∑==
=+++==⎟⎟ ⎠
⎞⎜⎜⎝
⎛ n
iiinnT xW xW xW xW xW x
12211
n
1ii ..........W (3.3)
De donde:
Fernando Monroy, Facultad de Ingeniería UNAM 35
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 43/322
Apuntes de Estática Estructural
T
n
iii
W
xW
x∑=
=1 (3.4)
Z
Y
0
y z
x
X
W 1
W 2 W 3W T
z3 z1 z2
W n
zn x1
y1
y2
y3
x2
x3
xn
yn
Figura 3.3. Centro de gravedad.
De manera similar, pero ahora con respecto al eje y podemos escribir:
ii
n
innT
n
i yW yW yW yW yW yW
122111..........
−−
Σ=+++==⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ Σ (3.5)
Entonces la posición de la resultante queda definida por:
T
ii
n
i
W
yW y 1=
Σ= (3.6)
Y suponiendo un giro relativo entre fuerzas y ejes en tal forma que, estas queden normales al plano“xz” o “yz” y tomando momentos respecto al eje “x” o “y”:
ii
n
innT i
n
i zW zW .......... zW zW zW zW
12211
1 ==Σ=+++==⎟⎟
⎠
⎞⎜⎜⎝
⎛ Σ (3.7)
T
ii
n
i
W
zW z 1=
Σ= (3.8)
Fernando Monroy, Facultad de Ingeniería UNAM 36
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 44/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 37
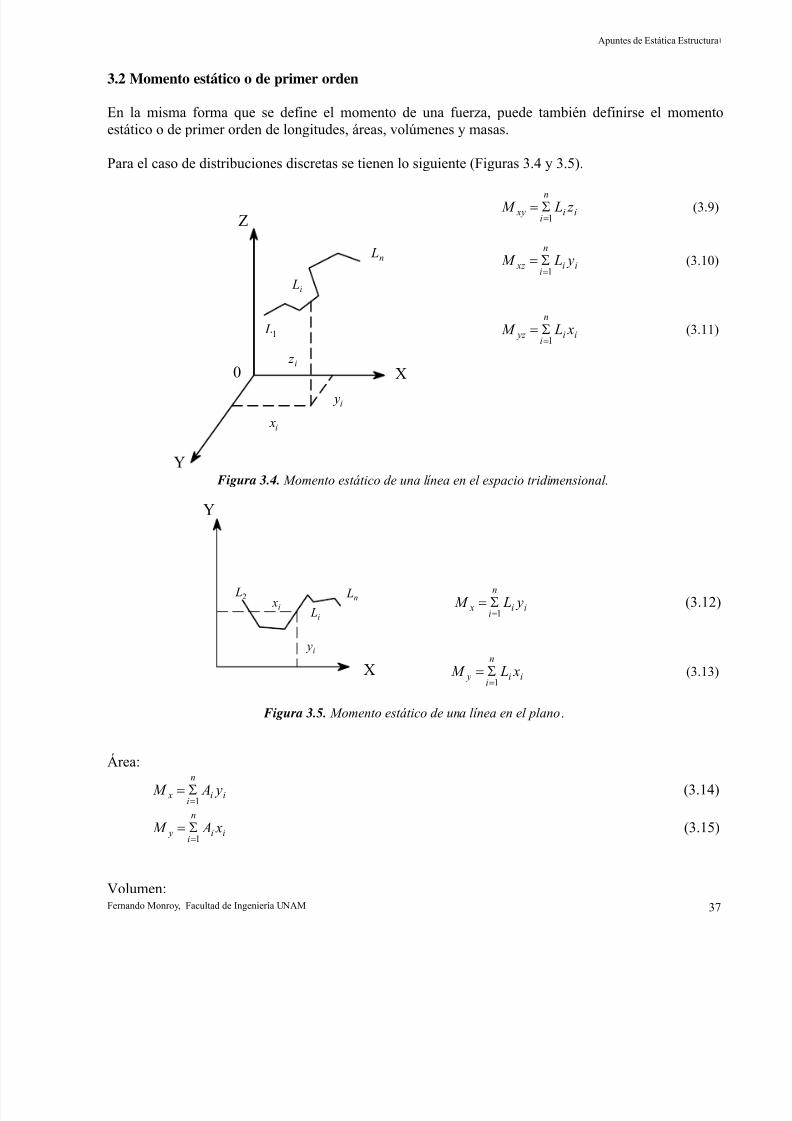
3.2 Momento estático o de primer orden
En la misma forma que se define el momento de una fuerza, puede también definirse el momentoestático o de primer orden de longitudes, áreas, volúmenes y masas.
Para el caso de distribuciones discretas se tienen lo siguiente (Figuras 3.4 y 3.5).
X
Z (3.9)ii
n
i xy z L M
1=Σ=
n L
Y
i L
i z
i x
i y
(3.10)ii
n
i xz y L M
1=Σ=
1 L (3.11)ii
n
i yz x L M
1=Σ=
0
Figura 3.4. Momento estático de una línea en el espacio tridimensional.
Y
X
n L
L2 L
i x (3.12) ii
n
i x y L M
1=Σ=
i
i y
(3.13)ii
n
i y x L M
1=Σ=
Figura 3.5. Momento estático de una línea en el plano.
Área:
(3.14)ii
n
i x y A M
1=Σ=
(3.15)ii
n
i y x A M
1=Σ=
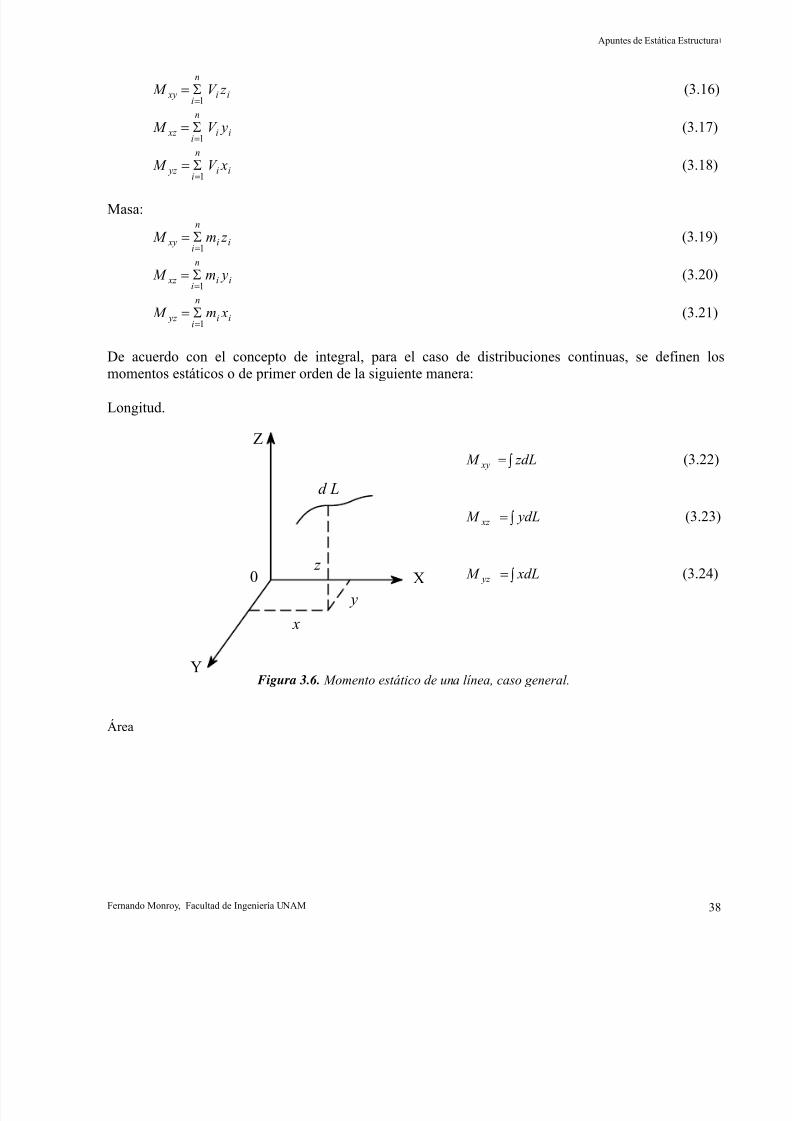
Volumen:
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 45/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 38
ii
n
i xy zV M
1=Σ= (3.16)
ii
n
i xz yV M
1=Σ= (3.17)
ii
n
i yz xV M
1=Σ= (3.18)
Masa:
(3.19)ii
n
i xy zm M
1=Σ=
(3.20)ii
n
i xz ym M
1=Σ=
(3.21)ii
n
i yz xm M
1=Σ=
De acuerdo con el concepto de integral, para el caso de distribuciones continuas, se definen los
momentos estáticos o de primer orden de la siguiente manera:
Longitud.
X
Z
Y
0 z
y
x
d L
∫= zdL M xy (3.22)
∫= ydL M xz (3.23)
∫= xdL M yz (3.24)
Figura 3.6. Momento estático de una línea, caso general.
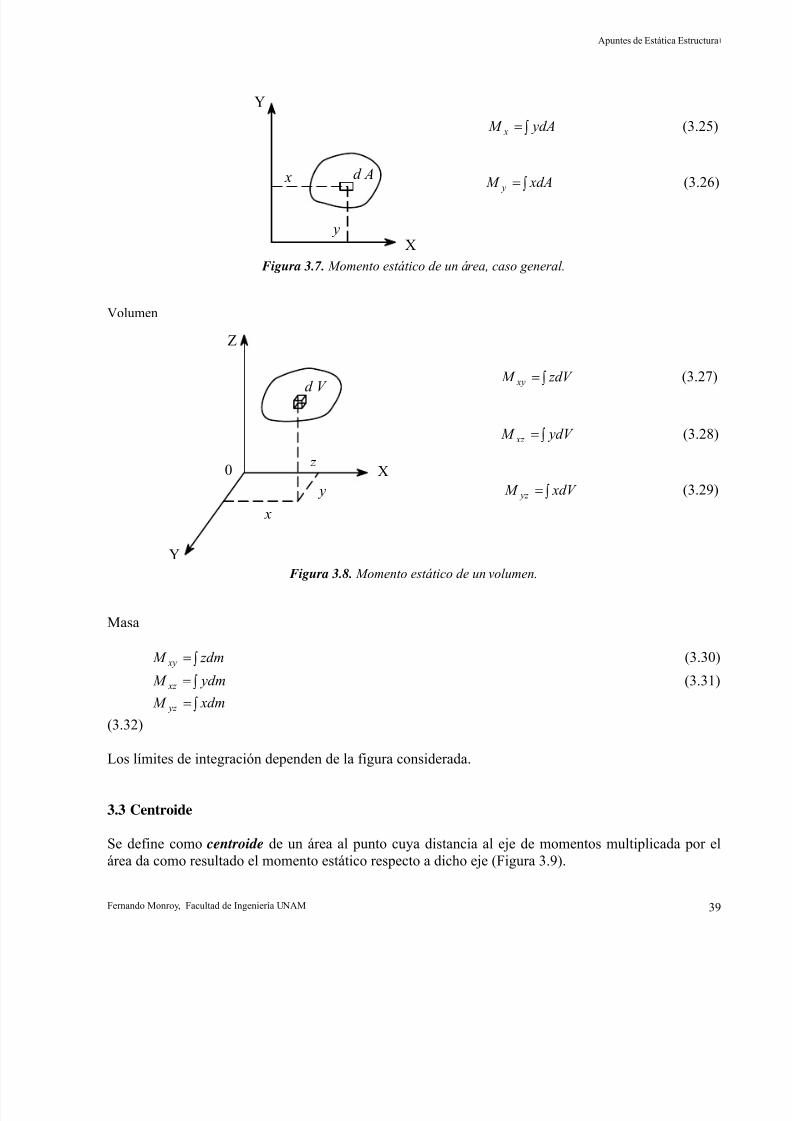
Área
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 46/322
Apuntes de Estática Estructural
X
Y
∫= ydA M x (3.25)
y
d A x
∫= xdA M y (3.26)
Figura 3.7. Momento estático de un área, caso general.
X
Volumen
Z
Fernando Monroy, Facultad de Ingeniería UNAM 39
Y
0 z
y
d V ∫= zdV M xy (3.27)
∫= ydV M xz (3.28)
∫= xdV M yz (3.29)
x
Figura 3.8. Momento estático de un volumen.
Masa
∫= zdm M xy (3.30)
∫= ydm M xz (3.31)
∫= xdm M yz
(3.32)
Los límites de integración dependen de la figura considerada.
3.3 Centroide
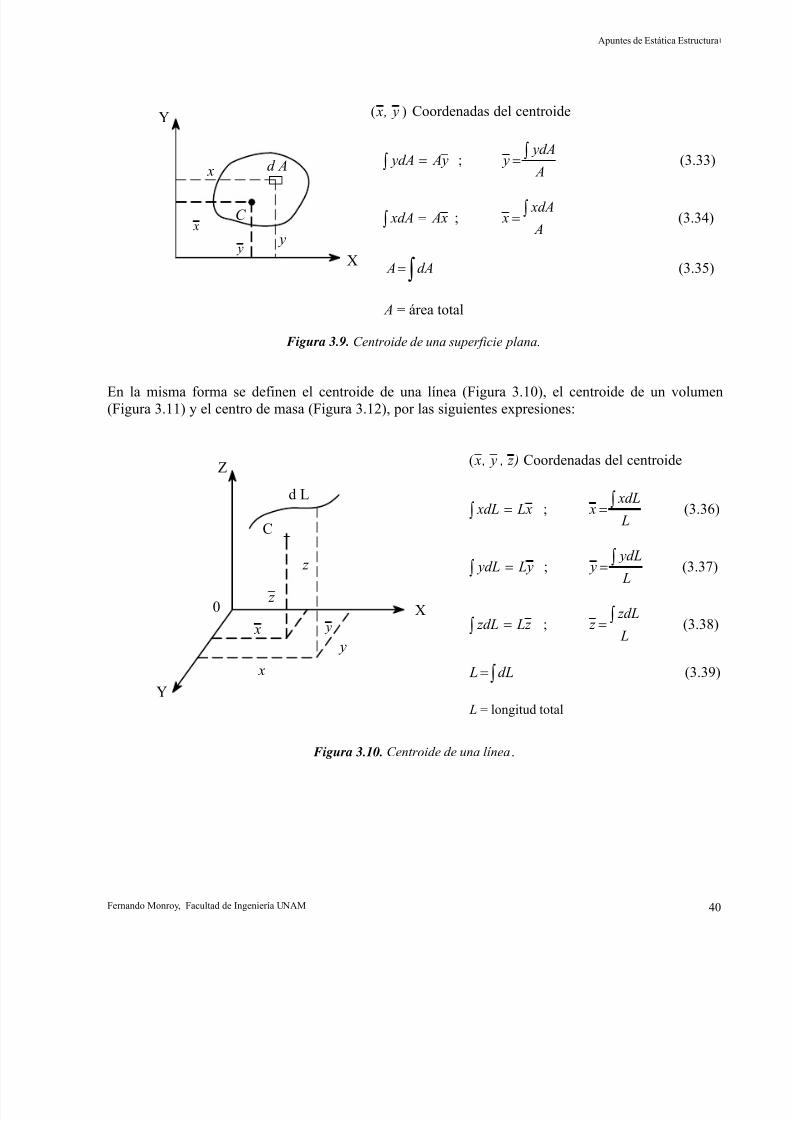
Se define como centroide de un área al punto cuya distancia al eje de momentos multiplicada por elárea da como resultado el momento estático respecto a dicho eje (Figura 3.9).
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 47/322
Apuntes de Estática Estructural
X
Y
x d A
)( y , x Coordenadas del centroide
∫ = y A ydA ; A
ydA y ∫= (3.33)
C x
Fernando Monroy, Facultad de Ingeniería UNAM 40
y y
∫ = x A xdA ; A
xdA x ∫= (3.34)
∫= dA A (3.35)
A = área total
Figura 3.9. Centroide de una superficie plana.
En la misma forma se definen el centroide de una línea (Figura 3.10), el centroide de un volumen(Figura 3.11) y el centro de masa (Figura 3.12), por las siguientes expresiones:
X
Z
Y
0
z
y
x
C
d L
y
) z , y , x( Coordenadas del centroide
∫ = x L xdL ; L
xdL x ∫
= (3.36)
x
z
∫ = y L ydL ; L
ydL y ∫= (3.37)
∫ = z L zdL ; L
zdL z ∫= (3.38)
(3.39)∫= dL L
L = longitud total
Figura 3.10. Centroide de una línea.
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 48/322
Apuntes de Estática Estructural
X
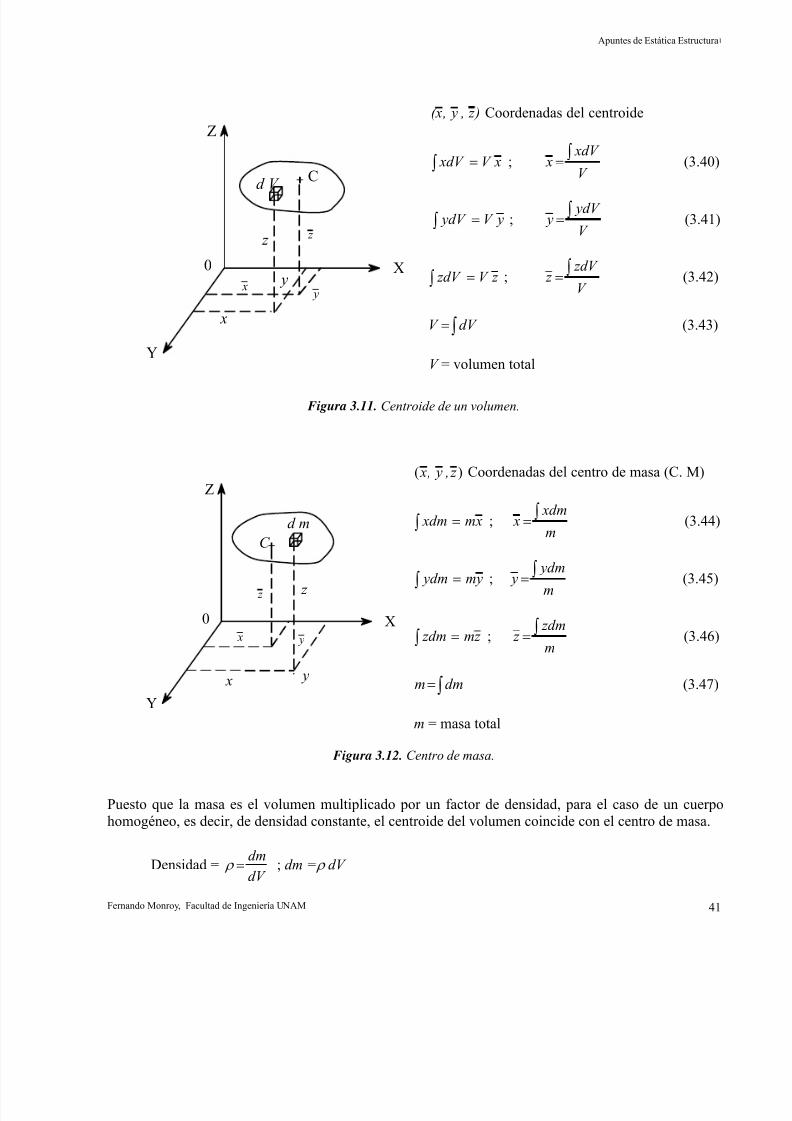
) z , y , x( Coordenadas del centroideZ
∫ = xV xdV ;V
xdV x ∫
= (3.40)
Fernando Monroy, Facultad de Ingeniería UNAM 41
Y
0
z
y
d V C
z ∫ = yV ydV ;
V
ydV y ∫
= (3.41)
x y
∫ = zV zdV ;V
zdV z ∫= (3.42)
x ∫= dV V (3.43)
V = volumen total
Figura 3.11. Centroide de un volumen.
X
Z )( z , y , x Coordenadas del centro de masa (C. M)
Y
0
z
y x
d mC
∫ = xm xdm ;m
xdm x ∫= (3.44)
z ∫ = ym ydm ;
m ydm y ∫= (3.45)
y x ∫ = zm zdm ;m
zdm z ∫= (3.46)
(3.47)∫= dmm
m = masa total
Figura 3.12. Centro de masa.
Puesto que la masa es el volumen multiplicado por un factor de densidad, para el caso de un cuerpohomogéneo, es decir, de densidad constante, el centroide del volumen coincide con el centro de masa.
Densidad =dV
dm= ρ ; dm = ρ dV

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 49/322
Apuntes de Estática Estructural
∫ = xm xdm
x = coordenada del centro de masa
∫ = xV ρdV ρ x
∫ = xV xdV
x = coordenada del cendroide del volumen
Prácticamente el centro de masa y el centro de gravedad coinciden.
∫ = xW xdW
x = coordenada del centro de gravedad
W = mg ; g = aceleración de la gravedad = constante
∫ = xm g dm g x
∫ = xm xdm
x = coordenada del centro de masa
Si una figura es simétrica respecto a un plano, su centroide se encuentra en dicho plano. Si la figura essimétrica respecto a dos planos también lo será respecto a la línea de intersección de ellos y su
centroide se encuentra en esa línea de intersección. Si es simétrica respecto a tres planos y por lo tantoa las dos líneas de intersección, su centroide será el punto común de estos.
C +
Eje de simetría− x
dAdA
x
Y
X
0
Ilustraremos lo anterior para el caso de una superficie simétrica respecto a un eje (Figura 3.13).
A todo punto de coordenada “ x” lecorresponde otro de coordenada “− x”
∫ ∫ ∫ ==−= x A xdAdA xdA x 0
0≠ A : == 0 x coordenadadel centroide que se encuentraen el eje de simetría.
Figura 3.13. Centroide de una superficie con un eje de simetría.
Fernando Monroy, Facultad de Ingeniería UNAM 42
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 50/322
Apuntes de Estática Estructural
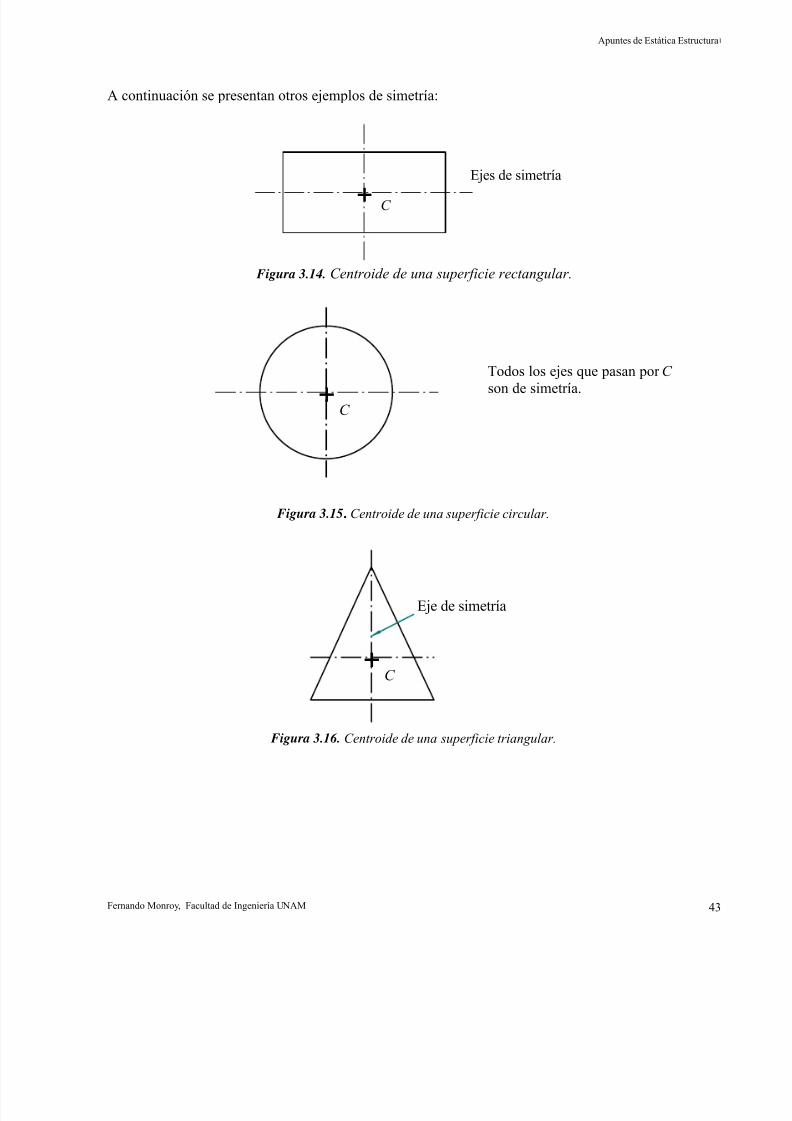
A continuación se presentan otros ejemplos de simetría:
C +Ejes de simetría
Figura 3.14. Centroide de una superficie rectangular.
C +
Todos los ejes que pasan por C son de simetría.
Figura 3.15. Centroide de una superficie circular.
C +
Eje de simetría
Figura 3.16. Centroide de una superficie triangular.
Fernando Monroy, Facultad de Ingeniería UNAM 43
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 51/322
Apuntes de Estática Estructural
X
Z
Y
X
Z
Y
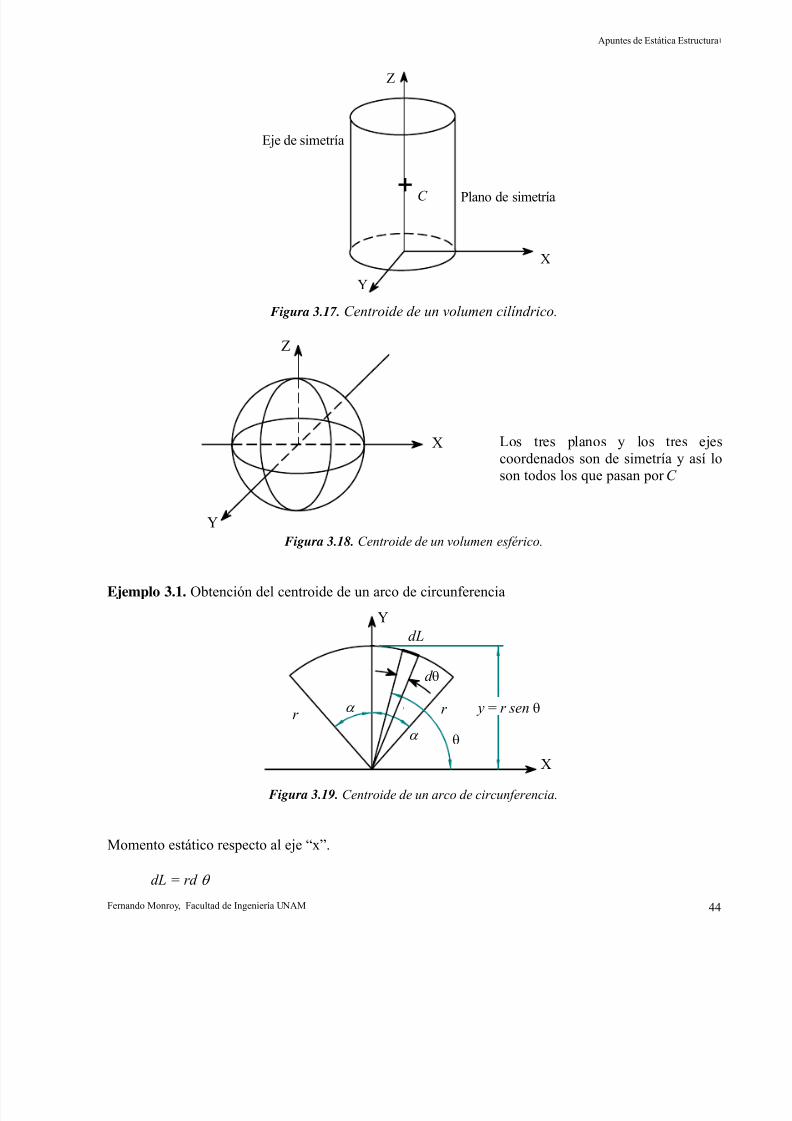
C + Plano de simetría
Eje de simetría
Figura 3.17. Centroide de un volumen cilíndrico.
Los tres planos y los tres ejescoordenados son de simetría y así loson todos los que pasan por C
Figura 3.18. Centroide de un volumen esférico.
Fernando Monroy, Facultad de Ingeniería UNAM 44
Ejemplo 3.1. Obtención del centroide de un arco de circunferencia
d θ
α θ
X
Y
r
dL
4 1 ° 7 6 °
4 2 ° 4 4 y = r sen θr α
Figura 3.19. Centroide de un arco de circunferencia.
Momento estático respecto al eje “x”.
dL = rd θ

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 52/322
Apuntes de Estática Estructural
2r θ rd θ senr ydL == ∫∫ [ ]
α π
α π
α π
α π
−
−
−
−=∫ 2
2
22
2
θ cosr θ d θ sen
(Simetría respecto al eje “ y”)
Longitud total del arco: L = 2r α
Posición del centroide sobre el eje de simetría “ y”
r α
α senr
L
ydL y
2
22
== ∫
α
α senr y =
Fernando Monroy, Facultad de Ingeniería UNAM 45
Casos particulares.
C
Y
XC
Y
X+
π
r 2y =
0=
=
y
π α semicircunferencia
circunferenciacompleta
8
2 4 r
Figura 3.20. Centroide de una semi-circunferencia y de una circunferencia completa.
Ejemplo 3.2. Centroide de un sector circular.
dA = ρ d θ d ρ
X
Y
d ρ
d θ
0
r
ρ
4 2 °
α
1 8 ° θ
46 x= ρ cos θ
Figura 3.21. Centroide de un sector circular.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 53/322
Apuntes de Estática Estructural
La figura es simétrica respecto al eje “ x”, por lo que su centroide se encuentra sobre dicho eje.
A
xdA x ∫
=
∫ == totaláreadA A
∫∫∫ == ρd d θ cos xdA ρ ρ ρ θ d θ cosd ∫∫ −
α
α ρ ρ
r
0
2
[ ] α α ρ α
α senr senr
θ sen3
3r
0
3
3
22
33 ==
⎥⎥⎦
⎤
⎢⎢⎣
⎡= −
∫∫∫ === ρ ρ d θ d dA A θ d d α
α∫∫ −
r
0 ρ ρ
[ ] α α ρ α
α
22r
0
2
r 22
r θ
2 ==
⎥⎥⎦
⎤
⎢⎢⎣
⎡= −
αr
α senr x
2
3
3
2
=
α
α senr x
3
2=
Casos particulares
Fernando Monroy, Facultad de Ingeniería UNAM 46
C
Y
X
C
Y
X
+
π
π α
3r 4
2
=
=
y
0=
=
x
π α
Semi-circulo Circulo completo
+π 3
4r 1 3
Figura 3.22. Centroide de un semi-circulo y de un círculo completo.
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 54/322
Apuntes de Estática Estructural
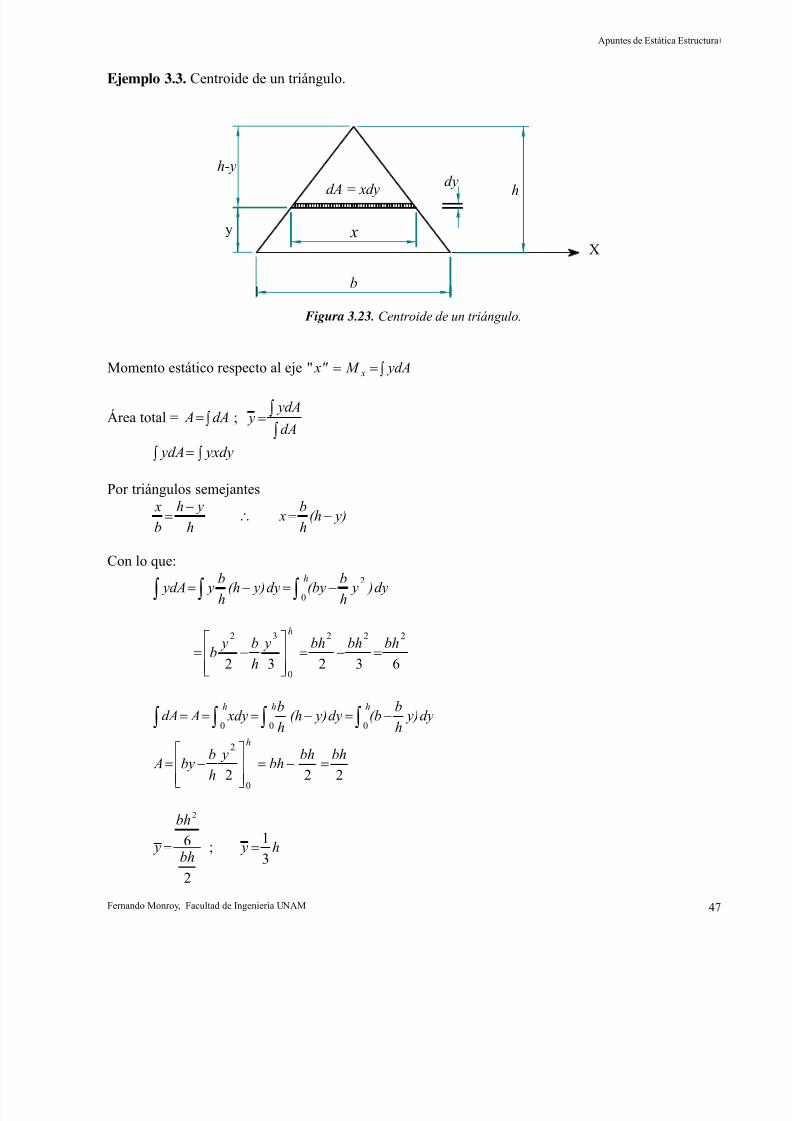
Ejemplo 3.3. Centroide de un triángulo.
X
dA = xdy
45 x
2 9
1 6y
h-y
4 5 h
70b
2
dy
Figura 3.23. Centroide de un triángulo.
Momento estático respecto al eje∫
== ydA M x" x
"
Área total = ;∫= dA A∫
∫=dA
ydA y
∫=∫ yxdy ydA Por triángulos semejantes
y)(hh
b x
h
yh
b
x−=∴
−=
Con lo que:
∫∫∫ −=−=h
dy ) yh
b(bydy y)(h
h
b y ydA
0
2
63232
222
0
32bhbhbh y
h
b yb
h
=−=⎥⎥⎦
⎤
⎢⎢⎣
⎡−=
∫∫∫∫ −=−===hhh
dy y)h
b(bdy y)(h
h
b xdy AdA
000
2220
2
bhbhbh yhbby A
h
=−=⎥⎥⎦
⎤⎢⎢⎣
⎡ −=
2
6
2
bh
bh
y = ; h y3
1=
Fernando Monroy, Facultad de Ingeniería UNAM 47
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 55/322
Apuntes de Estática Estructural
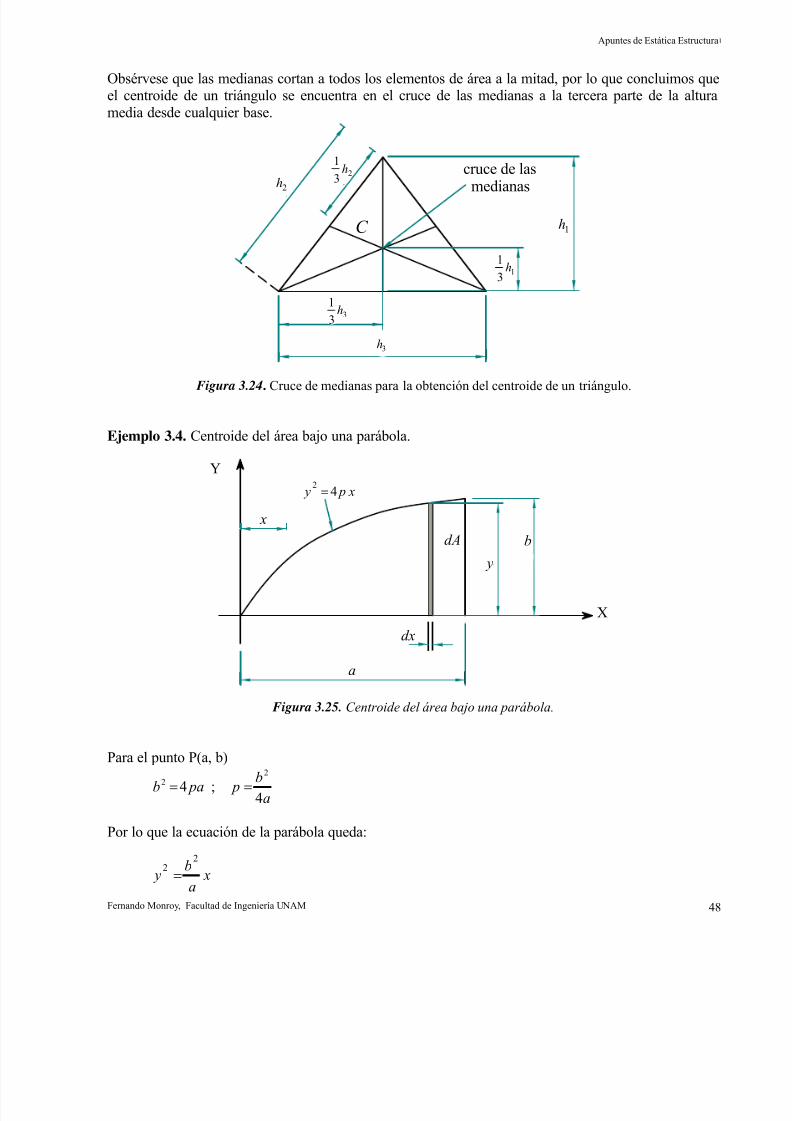
Obsérvese que las medianas cortan a todos los elementos de área a la mitad, por lo que concluimos queel centroide de un triángulo se encuentra en el cruce de las medianas a la tercera parte de la alturamedia desde cualquier base.
C
cruce de las
medianas 5 82h 2 7
23
1h
1 5
35
70
4 6
1h
13
1h
33
1h
3h
Figura 3.24. Cruce de medianas para la obtención del centroide de un triángulo.
Ejemplo 3.4. Centroide del área bajo una parábola.
dA
Y
X
x p y 42
=
b 4 2
4
1
y
81a
16 x
2dx
Figura 3.25. Centroide del área bajo una parábola.
Para el punto P(a, b)
a
b p pab
4;4
22 ==
Por lo que la ecuación de la parábola queda:
xa
b y
22
=
Fernando Monroy, Facultad de Ingeniería UNAM 48

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 56/322
Apuntes de Estática Estructural
Además
∫=∫= xydx xdA M y Pero
a
x
b y=
dx xa
bdx
a
x xb M
/ y ∫∫ ==
23
ba xa
ba
o
/ 225
5
2
5
2=⎥⎦
⎤⎢⎣
⎡=
dx y ydx y
dA y
M x
∫∫∫ ===
2
2
1
22
222
0
2
4
1
222
1ab
x
a
b xdx
a
ba
o
a
=⎥⎥⎦
⎤
⎢⎢⎣
⎡== ∫
∫ =∫== ydxdA A ∫ =
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=a
a
/
ab x
a
bdx x
a
b
0
0
23
3
2
3
2
Puesto que:
A
M y
A
M x x y
== ;
Tenemos:
ab
ba x
3
25
2 2
= ; a x5
3=
ab
ab y
3
241 2
= ; b y8
3=
Resumen
Fernando Monroy, Facultad de Ingeniería UNAM 49

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 57/322
Apuntes de Estática Estructural
C
Y
X
xa
b y
22
=
0
+ 4 2
1 6b83
b
2741
68aa
5
2a
5
3
Figura 3.26. Posición del centroide del área bajo una parábola.
3.3.1 Centroide de superficies compuestas
Si una superficie puede dividirse en partes cuyos centroides se conocen, entonces el momento de todala superficie respecto a cualquier plano o eje se puede obtener sin tener que recurrir a los métodos deintegración. El momento de la superficie compuesta es la suma algebraica de los momentos de lasdiferentes partes.
Si a1 , a2 , a3, …….. an, son las áreas de las partes y n x........ , x , x , x 321 , sus distancias centroidales
respectivas, entonces tenemos:
x )a..aa(a xa........ xa xa xa nnn ++++=++++ 321332211 (3.48)
x A xa ii
n
i=Σ
=1 (3.49)
A
xa
a
xa x
ii
n
i
i
n
i
ii
n
i 1
1
1 =
=
=Σ
=
Σ
Σ=
(3.50)
3.3.2 Centroide de cuerpos compuestos
Si un cuerpo se puede dividir en partes cuyos centroides se conocen, entonces se puede obtener elcentroide del volumen del cuerpo aplicando el mismo principio que para la superficie compuesta.
x )v..vv(v xv........ xv xv xv nnn ++++=++++ 321332211
(3.51)
Fernando Monroy, Facultad de Ingeniería UNAM 50
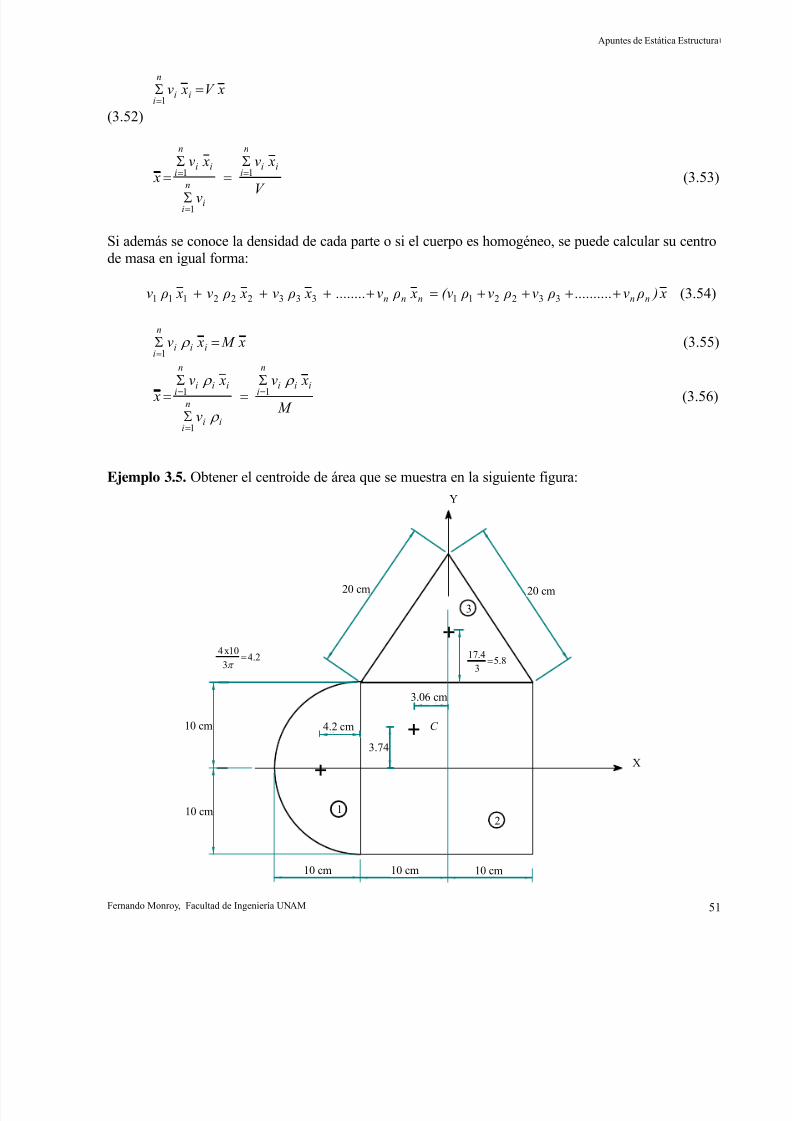
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 58/322
Apuntes de Estática Estructural
xV xv ii
n
i=Σ
=1
(3.52)
V
xv
v
xv x
ii
n
i
in
i
ii
n
i 1
1
1 =
=
=Σ
=
Σ
Σ= (3.53)
Si además se conoce la densidad de cada parte o si el cuerpo es homogéneo, se puede calcular su centrode masa en igual forma:
x ) ρv.......... ρv ρv ρ(v x ρv........ x ρv x ρv x ρv nnnnn ++++=++++ 332211333222111 (3.54)
x M xv iii
n
i=Σ
= ρ
1 (3.55)
M
xv
v
xv x
iii
n
i
ii
n
i
iii
n
i ρ
ρ
ρ 1
1
1 =
=
= Σ=
Σ
Σ= (3.56)
Ejemplo 3.5. Obtener el centroide de área que se muestra en la siguiente figura:
Fernando Monroy, Facultad de Ingeniería UNAM 51
X
+
Y
0 0
12
3
+
8.53
4.17=
20 cm
+ C
2.43
10x4=
π
20 cm
4 0
4 0
16
194.2 cm
1 9
3.74
10 cm
10 cm
40 41 4010 cm 10 cm 10 cm
3.06 cm
0
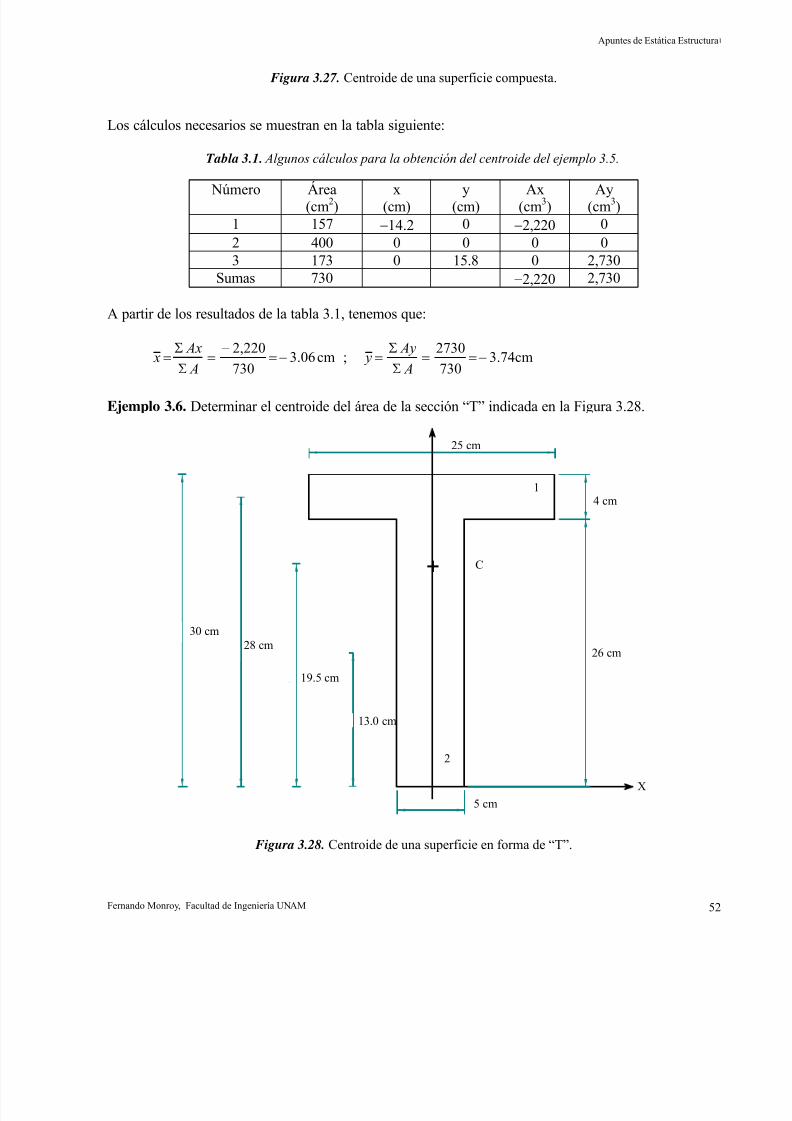
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 59/322
Apuntes de Estática Estructural
Figura 3.27. Centroide de una superficie compuesta.
Los cálculos necesarios se muestran en la tabla siguiente:
Tabla 3.1. Algunos cálculos para la obtención del centroide del ejemplo 3.5.
Número Área(cm2)
x(cm)
y(cm)
Ax(cm3)
Ay(cm3)
1 157 −14.2 0 −2,220 02 400 0 0 0 03 173 0 15.8 0 2,730
Sumas 730 −2,220 2,730
A partir de los resultados de la tabla 3.1, tenemos que:
cm3.06
730
2,220−=
−=
Σ
Σ=
A
Ax x ; 3.74cm
730
2730−==
Σ
Σ=
A
Ay y
Ejemplo 3.6. Determinar el centroide del área de la sección “T” indicada en la Figura 3.28.
+ C
2
19.5 cm
28 cm
4 cm
5 cm
13.0 cm
30 cm
X
1 4 0
1 3 0
1 0 0
6 0
0
0
0
0 26 cm
1
25 cm
Figura 3.28. Centroide de una superficie en forma de “T”.
Fernando Monroy, Facultad de Ingeniería UNAM 52
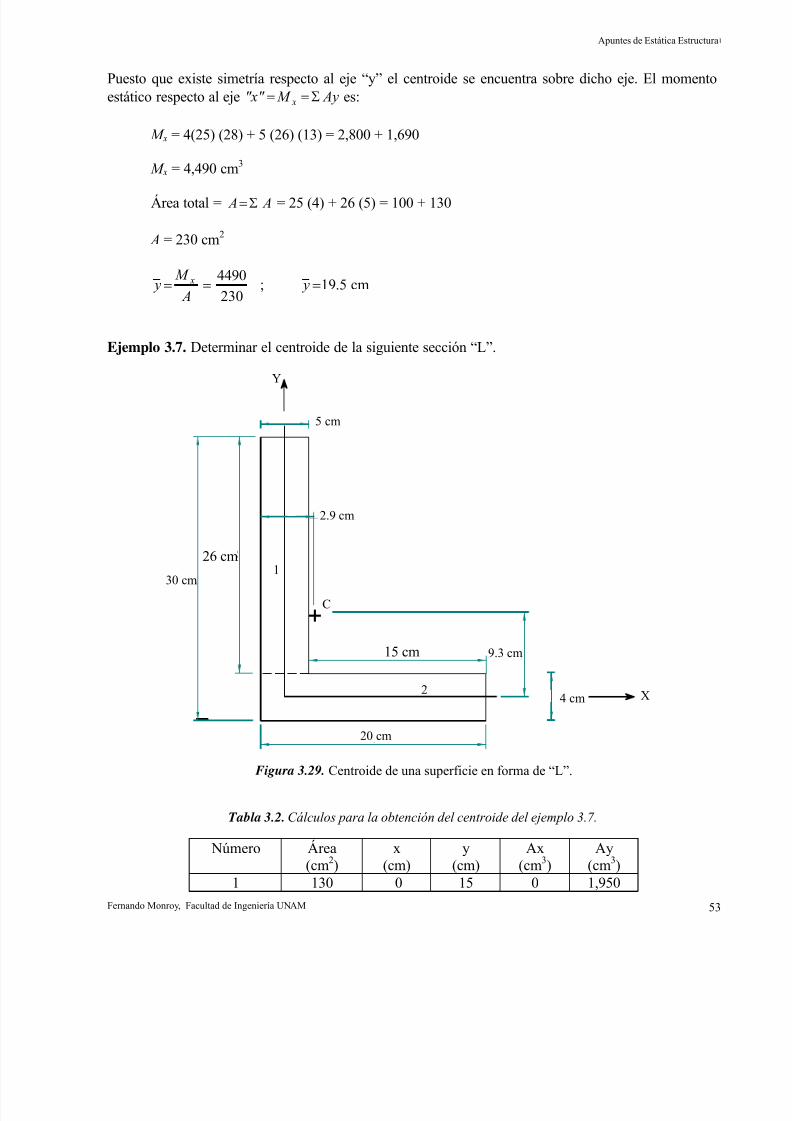
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 60/322
Apuntes de Estática Estructural
Puesto que existe simetría respecto al eje “y” el centroide se encuentra sobre dicho eje. El momentoestático respecto al eje es: Ay M "x" x Σ==
M x = 4(25) (28) + 5 (26) (13) = 2,800 + 1,690
M x = 4,490 cm3
Área total = = 25 (4) + 26 (5) = 100 + 130 A A Σ=
A = 230 cm2
cm.519;230
4490=== y
A
M y x
Ejemplo 3.7. Determinar el centroide de la siguiente sección “L”.
+C
2
5 cm
Y
X
2.9 cm
4 cm
1
20
020 cm
0
1 0 0
75 3 59.3 cm15 cm
030 cm
26 cm
0
Figura 3.29. Centroide de una superficie en forma de “L”.
Tabla 3.2. Cálculos para la obtención del centroide del ejemplo 3.7.
Número Área(cm2)
x(cm)
y(cm)
Ax(cm3)
Ay(cm3)
1 130 0 15 0 1,950
Fernando Monroy, Facultad de Ingeniería UNAM 53
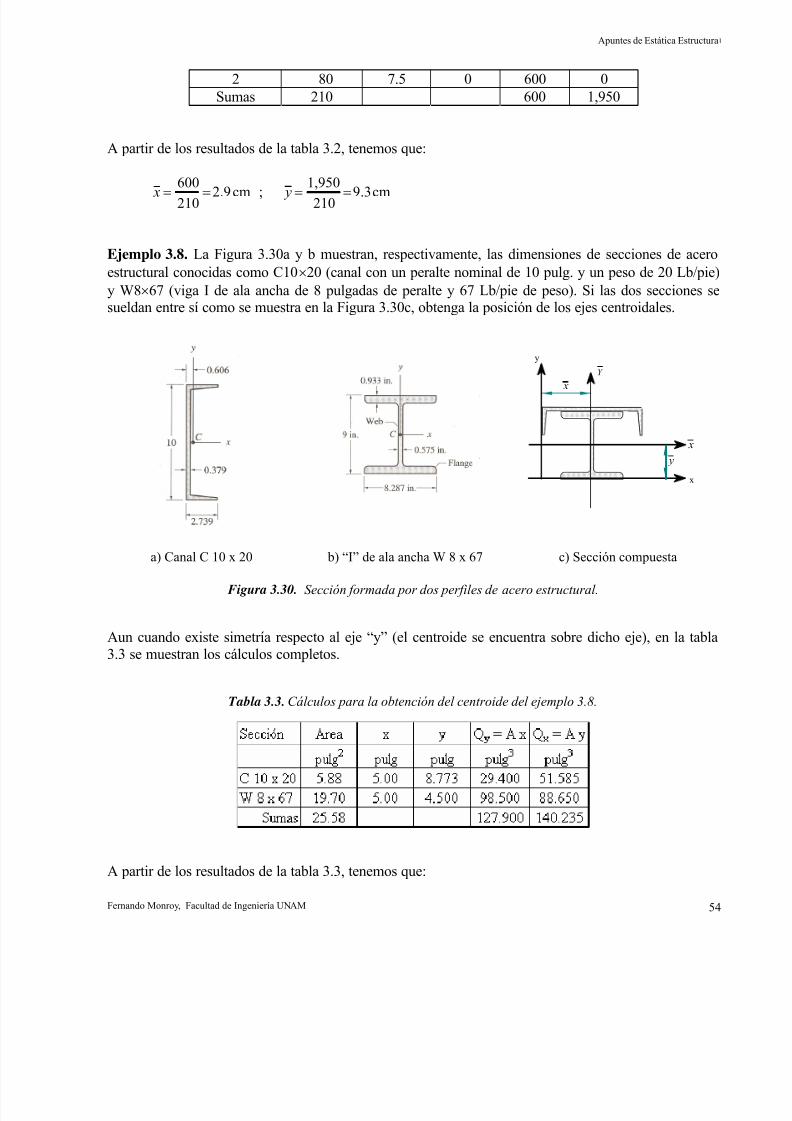
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 61/322
Apuntes de Estática Estructural
2 80 7.5 0 600 0Sumas 210 600 1,950
A partir de los resultados de la tabla 3.2, tenemos que:
cm.92210060 == x ; cm3.92101,950 == y
Ejemplo 3.8. La Figura 3.30a y b muestran, respectivamente, las dimensiones de secciones de aceroestructural conocidas como C10×20 (canal con un peralte nominal de 10 pulg. y un peso de 20 Lb/pie)y W8×67 (viga I de ala ancha de 8 pulgadas de peralte y 67 Lb/pie de peso). Si las dos secciones sesueldan entre sí como se muestra en la Figura 3.30c, obtenga la posición de los ejes centroidales.
y
x
Y
x y 0
0 x
a) Canal C 10 x 20 b) “I” de ala ancha W 8 x 67 c) Sección compuesta
Figura 3.30. Sección formada por dos perfiles de acero estructural.
Aun cuando existe simetría respecto al eje “y” (el centroide se encuentra sobre dicho eje), en la tabla3.3 se muestran los cálculos completos.
Tabla 3.3. Cálculos para la obtención del centroide del ejemplo 3.8.
A partir de los resultados de la tabla 3.3, tenemos que:
Fernando Monroy, Facultad de Ingeniería UNAM 54

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 62/322
Apuntes de Estática Estructural
pulg525.58
9.127== x ; pulg48.5
25.58
140.235== y
3.4 Momentos de inercia de áreas planas
Las propiedades geométricas, algunas necesarias en el análisis estructural y otras de uso muy frecuenteen otras áreas de la ingeniería estructural son las denominadas “Momentos de Inercia o de Segundo Orden”,cuyas definiciones, expresiones para formas planas típicas y relación entre algunos de ellos se presentan acontinuación.
Para ello consideremos el área de una superficie plana y los ejes coordenados ortogonales “x” y “y”(Figura 3.31).
X
Y
r y
dA x
Figura 3.31. Área de una superficie plana.
Se define al momento de inercia respecto al eje “x” ( I x) como:
∫= dA y I x2
(3.57)
De manera similar el momento de inercia respecto al eje “y” ( I y) está determinado por la siguienteexpresión:
∫= dA x I y2
(3.58)
3.5 Producto de inercia
El producto de inercia ( I xy) con respecto a los ejes “xy” se expresa por:
∫= dA xy I xy (3.59)
Puede observarse que el producto de inercia respecto a ejes, en donde uno de los cuales es de simetría,vale cero.Fernando Monroy, Facultad de Ingeniería UNAM 55

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 63/322
Apuntes de Estática Estructural
C
Y
X
Ixy = 0
Figura 3.32. Producto de inercia para una sección simétrica.
El momento polar de inercia ( I p) respecto a un eje normal al plano del área que la corta en el origen “0”de los ejes “x” y “y” está expresado por:
∫= dAr I P
2
(3.60)
A continuación analizaremos la relación que existe entre los momentos de inercia respecto a los ejes “x” e “y” yel momento polar de inercia.
De la Figura 3.31 se observa que:222
y xr +=
∫∫∫ +=+= dA ydA xdA y x I p2222
)(
(3.61) y x p I I I +=
Es decir, el momento polar de inercia es igual a la suma de los momentos de inercia respecto a los ejes “x” e “y”.
3.5.1 Traslación de ejes
Fernando Monroy, Facultad de Ingeniería UNAM 56
Consideremos un área y dos ejes paralelos (x y x’) uno de los cuales pasa por su centroide (Figura 3.33).
y
1
1
x
x' y' 1 y
dA
y
),( y xC
Figura 3.33. Traslación de ejes.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 64/322
Apuntes de Estática Estructural
De acuerdo a las definiciones anteriores, el momento de inercia del área con respecto al eje x es:
∫∫ +== dA ydA y I x22
)'y( ∫ ++= dA y y y y )''2(22
I x ∫ ∫∫ ++= dA y' dA y' ydA y
22
2
Pero como: ∫ == 0y dA y' ,cte y (momento estático del área con respecto a su centroide) por lo que
finalmente se obtiene:
2 y A I I x x += (3.62)
La anterior es la expresión del Teorema de Steiner, o de los ejes paralelos, es decir, el momento deinercia de un área cualquiera respecto a un eje cualquiera es igual al momento de inercia respecto a sueje centroidal paralelo al anterior más el producto del área por el cuadrado de la distancia entre los dos
ejes. Las unidades para está propiedad comúnmente son: ( L2)( L2)= L4, m4, cm4, pulg4, etc.
3.5.2 Radio de giro
El radio de giro (k ), para los ejes “x” e “y”, se define de la siguiente manera:
Ak I x x2
=
(3.63)
A I k x
x = (3.64)
Ak I y y2
=
(3.65)
A
I k
y y = (3.66)
Ak I p p
2
= (3.67)
A
I k
p p = (3.68)
Ya que: I p = I x + I y
Fernando Monroy, Facultad de Ingeniería UNAM 57
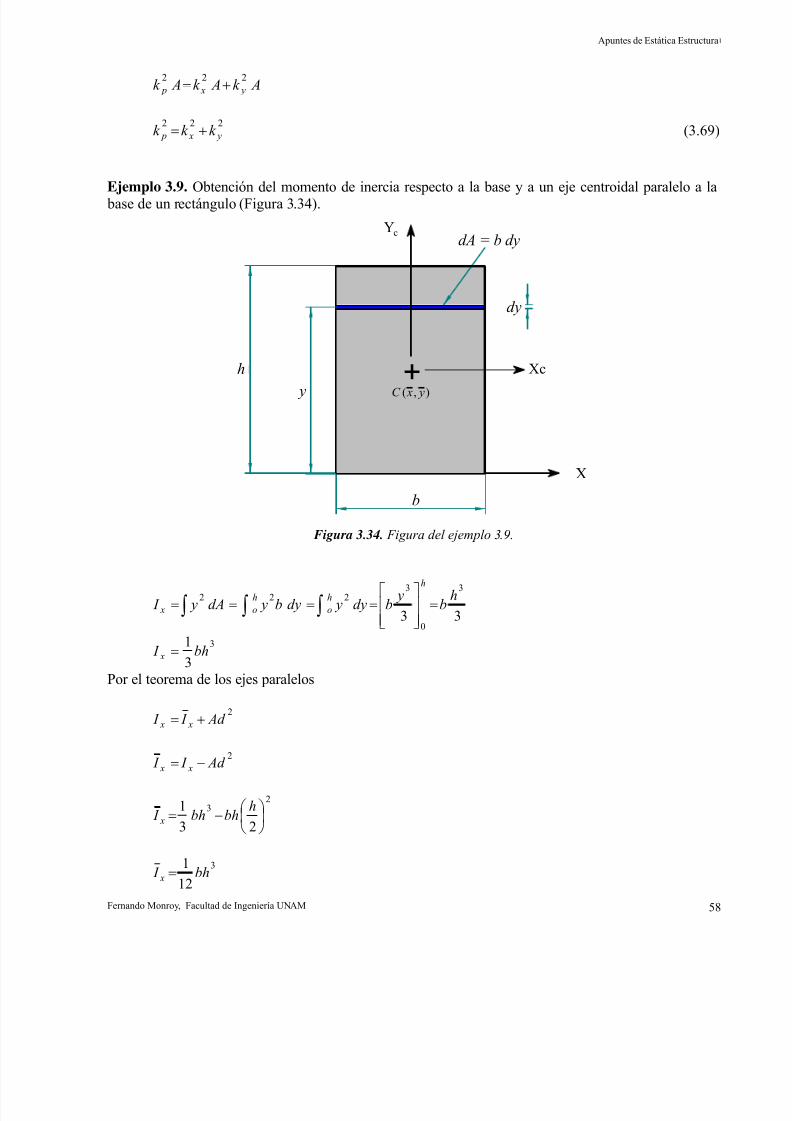
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 65/322
Apuntes de Estática Estructural
Ak Ak Ak y x p222
+=
(3.69)222
y x p k k k +=
Ejemplo 3.9. Obtención del momento de inercia respecto a la base y a un eje centroidal paralelo a la base de un rectángulo (Figura 3.34).
X
dA = b dy
+
cY
Xc
1
1
1
h
b
),( y xC
dy
5 7 y
Figura 3.34. Figura del ejemplo 3.9.
33
3
0
3222 h
b y
bdy ydyb ydA y I
h
ho
ho x =
⎥⎥⎦
⎤
⎢⎢⎣
⎡==== ∫∫∫
3
3
1bh I x =
Por el teorema de los ejes paralelos
2 Ad I I x x +=
2 Ad I I x x −=
23
23
1⎟
⎠
⎞⎜⎝
⎛ −=
hbhbh I x
3
12
1bh I x =
Fernando Monroy, Facultad de Ingeniería UNAM 58
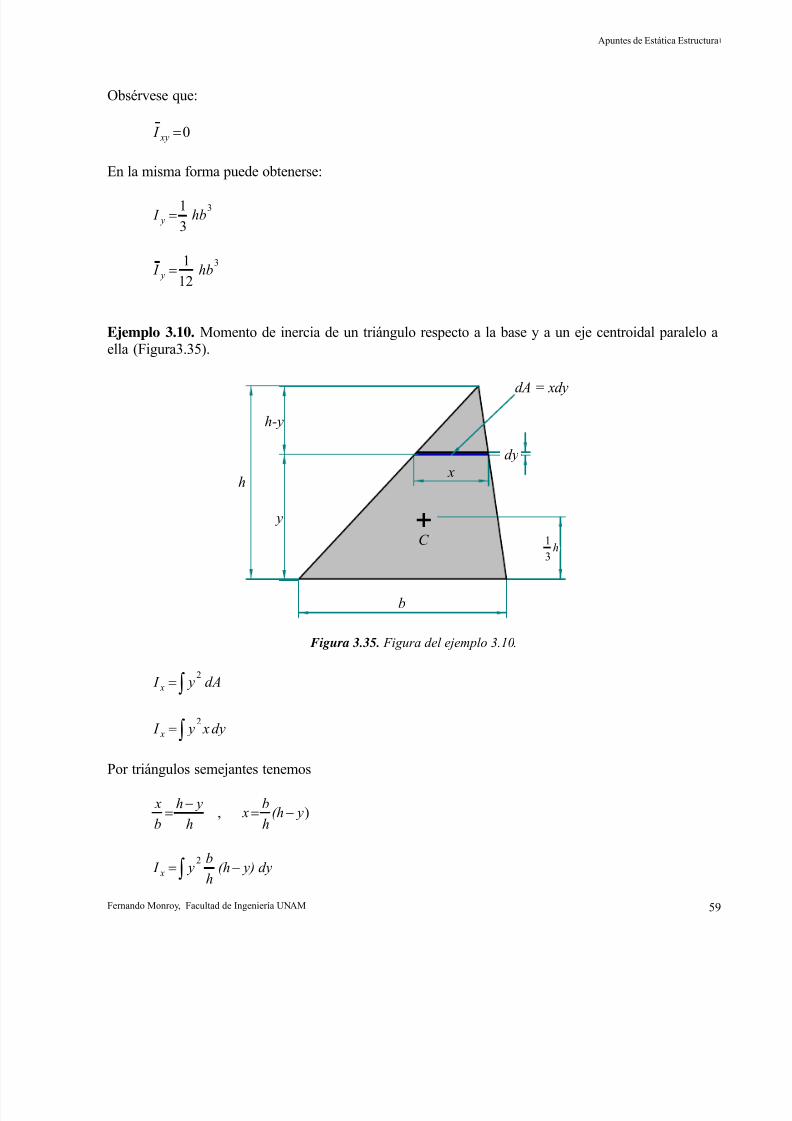
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 66/322
Apuntes de Estática Estructural
Obsérvese que:
0= xy I
En la misma forma puede obtenerse:
3
3
1hb I y =
3
12
1hb I y =
Ejemplo 3.10. Momento de inercia de un triángulo respecto a la base y a un eje centroidal paralelo aella (Figura3.35).
C +
dA = xdy
1
1
1 1
1h x
dy
b
2 4
4 5
h-y
y
h31
Figura 3.35. Figura del ejemplo 3.10.
dA y I x ∫=2
dy x y I x ∫=2
Por triángulos semejantes tenemos
h
yh
b
x −= , ) y(h
h
b x −=
y) dy(hh
b y I x −= ∫
2
Fernando Monroy, Facultad de Ingeniería UNAM 59

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 67/322
Apuntes de Estática Estructural
∫ ∫−=h h
dy yh
bdy yb
0 0
32
hh
y
h
b yb
0
4
0
3
43 ⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡−
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡==
43
33bhbh
−=
3
12
1bh I x =
A partir del teorema de los ejes paralelos tenemos que:
2 Ad I I x x −= ;
23
31
2121 ⎟
⎠ ⎞⎜
⎝ ⎛ −= hbhbh I x
3
36
1bh I x =
Fernando Monroy, Facultad de Ingeniería UNAM 60
Ejemplo 3.11. Momento de inercia de un círculo respecto a un eje diametral.
dA = ρ d θ d ρ
X
Y
1 °
1
1
1
1
1
y= ρ cos θ
0 x= ρ cos θ
r
dρ
ρ
θ
1 ° d θ
Figura 3.36. Figura del ejemplo 3.11.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 68/322
Apuntes de Estática Estructural
∫= dA y I x2
φd ρd ρ )φ sen( ρ I x2
∫=
∫= φd ρd φ sen ρ
23
φ φ ρ ρ π
d send ∫∫=2
0
2r
0
3
φ φ ρ π
d cos∫ ⎟ ⎠
⎞⎜⎝
⎛ −
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
2
0
r
0
4
22
1
2
1
4
⎥
⎦
⎤⎢
⎣
⎡−= ∫∫
π π φ φ φ
2
0
2
0
4
22
2
1
2
1
4
d cosd r
∫∫ −= π π
φ φ φ 2
0
42
0
4
2282
1
4d cos
r d
r
π
φ φ
2
0
4
24
1
8 ⎥⎦
⎤⎢⎣
⎡−= sen
r
y x I r
I ==
4
4π
Ejemplo 3.12. Momento polar de inercia de un círculo respecto a su centro (Figura 3.37).Y
X
dA = 2π P d ρ
d ρ
ρ
+
r
Figura 3.37. Figura del ejemplo 3.12.
Fernando Monroy, Facultad de Ingeniería UNAM 61
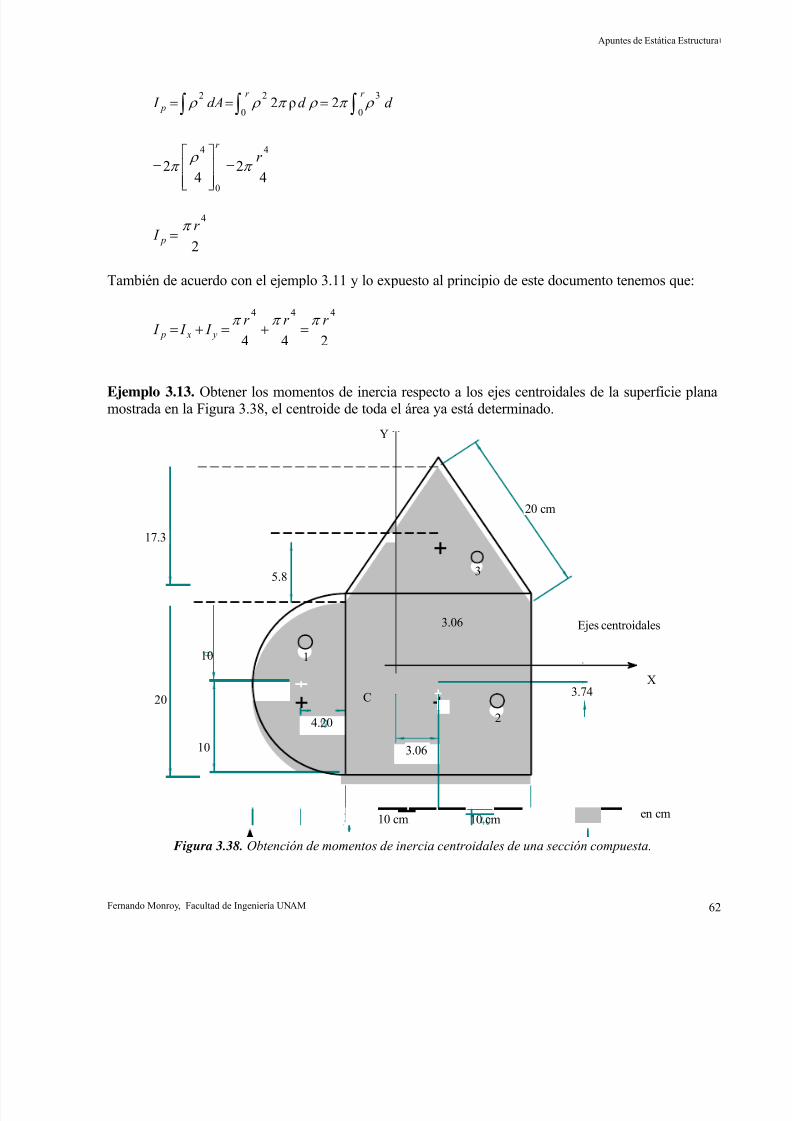
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 69/322
Apuntes de Estática Estructural
d d dA I r r
p 2ρ20
3
0
22
∫∫∫ === ρ π ρ π ρ ρ
42
42
4
0
4r
r
π ρ
π =⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=
2
4r
I pπ
=
También de acuerdo con el ejemplo 3.11 y lo expuesto al principio de este documento tenemos que:
244
444r r r
I I I y x pπ π π
=+=+=
Ejemplo 3.13. Obtener los momentos de inercia respecto a los ejes centroidales de la superficie planamostrada en la Figura 3.38, el centroide de toda el área ya está determinado.
X
Y
0
+C
3.06 Ejes centroidales
Acotaciones en cm
05.8
03.74
20 cm
017.3
19
03.06
020
010
0
10
40 4010 cm 10 cm
+3
2+
4.20
1
Figura 3.38. Obtención de momentos de inercia centroidales de una sección compuesta.
Fernando Monroy, Facultad de Ingeniería UNAM 62

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 70/322
Apuntes de Estática Estructural
Tabla 3.4. Algunos cálculos para el ejemplo 3.13.A x I y I y x 2
y A 2
x A x I y I
No. cm2 cm4 cm4 cm cm cm4 cm4 cm4 cm4
1 157 3,927 1,158 −3.74 −11.14 2,196 19,483 6,123 20,6412 400 13,333 13,333 −3.74 3.06 5,596 3,745 18,928 17,0783 173 2,876 2,883 12.06 3.06 25,161 1,620 28,037 4,503
Σ = 730 53,088 42,222
Los momentos de inercia que se muestran en la Tabla 3.4 (columnas 3 y 4) se obtienen de la siguientemanera:
927,3)10(8
1 4
1== π x I 158,1)2.4(157)10(
8
1 24
1=−= π y I
333,13)20(2012
1 3
2== x I 333,13)20(20
12
1 3
2== y I
876,2)3.17(2036
1 3
3== x I 883,2)10(3.17
12
12
3
3=⎟
⎠
⎞⎜⎝
⎛ = y I
En resumen:
4cm53,088= x I
4cm222,42= y I
Ejemplo 3.14. Producto de inercia de un rectángulo (Figura 3.39).
Si los ejes son de simetría resulta:
Fernando Monroy, Facultad de Ingeniería UNAM 63
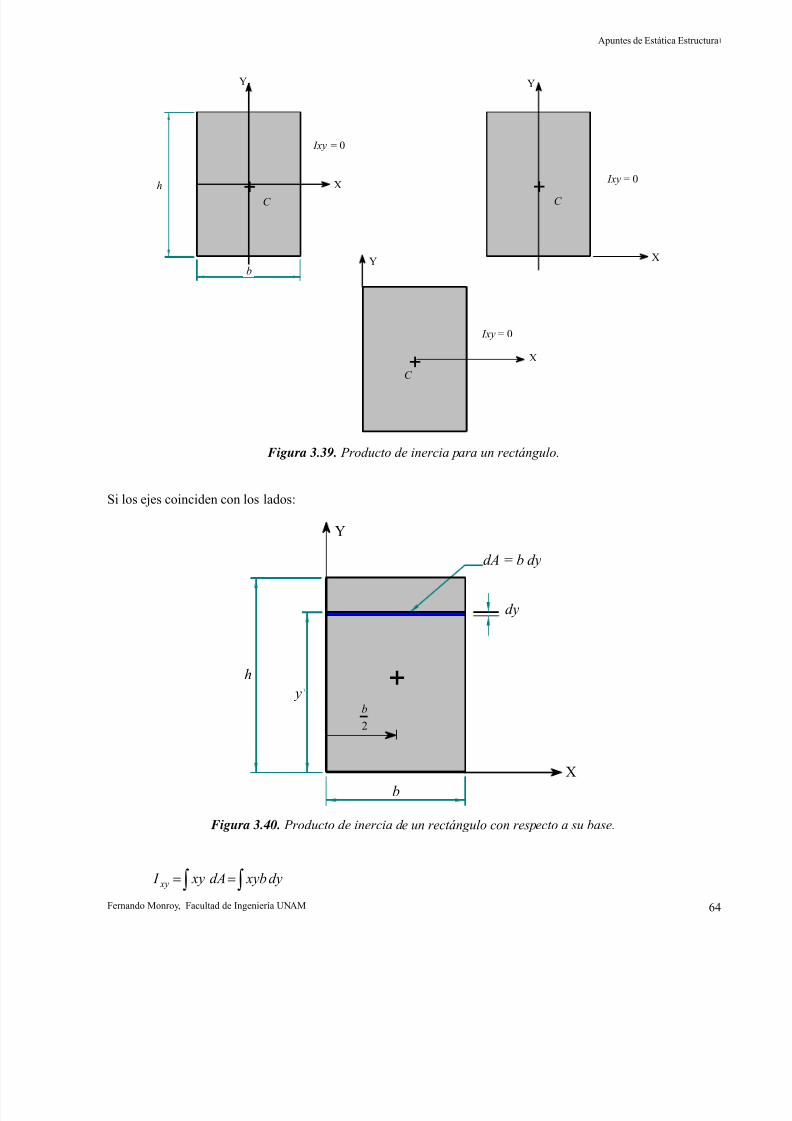
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 71/322
Apuntes de Estática Estructural
C
Ixy = 0
+ X
Y
C
Ixy = 0
+
X
Y
C
Ixy = 0
+ X
Y50b
7
0
h
Figura 3.39. Producto de inercia para un rectángulo.
Fernando Monroy, Facultad de Ingeniería UNAM 64
Si los ejes coinciden con los lados:
dy
X
dA = b dy
+
2
b
Y
0
50b
5 8 y
7 0 h
Figura 3.40. Producto de inercia de un rectángulo con respecto a su base.
dy xybdA xy I xy ∫∫ ==

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 72/322
Apuntes de Estática Estructural
Como:2
b x =
[ ] 22
02
2
0
2
442h
b y
bdy y
b I
hh
xy === ∫
4
22 hb I xy =
Ejemplo 3.15. Producto de inercia de un cuadrante de círculo.
dA = ρ d θ d ρ
X
Y
d ρ
00
1 ° θ
4 0 y = ρ senθ
r
30 x= ρ cos θ
0 ° d θ
Figura 3.41. Figura del ejemplo 3.15.
φ ρ ρ φ ρ φ ρ d d encosdA xy I xy s∫∫ ==
φ ρ φ φ ρ d sencos∫=3
Como: cos φ sen φ φ 22
1 sen=
φ φ ρ ρ
π
d send I r
xy 224
12
00
3
∫∫=
Fernando Monroy, Facultad de Ingeniería UNAM 65

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 73/322
Apuntes de Estática Estructural
∫⎥⎥⎦
⎤
⎢⎢⎣
⎡= 2
0
4
24
1
4
π
φ φ ρ
d sen
r
0
4
22
4
1
4
2
0
4
−=⎥⎦
⎤⎢⎣
⎡−=
π
φ cosr
Entonces:4
8
1r I xy =
3.5.3 Traslación de ejes para el producto de inercia.
Consideremos un área y dos sistemas de ejes paralelos uno de los cuales pasa por su centroide.
d A
x'
X
y'
Y
C+
16x'
1 0y '
69 x
6 5 y
Figura 3.42. Traslación de ejes para el producto de inercia
dA xy I xy ∫=
Pero: x' x x +=
y' y y +=
( )( )dA y' y x' x I xy ++= ∫
dA y' x' dA x' ydA y' xdA y x ∫∫∫∫ +++=
Fernando Monroy, Facultad de Ingeniería UNAM 66
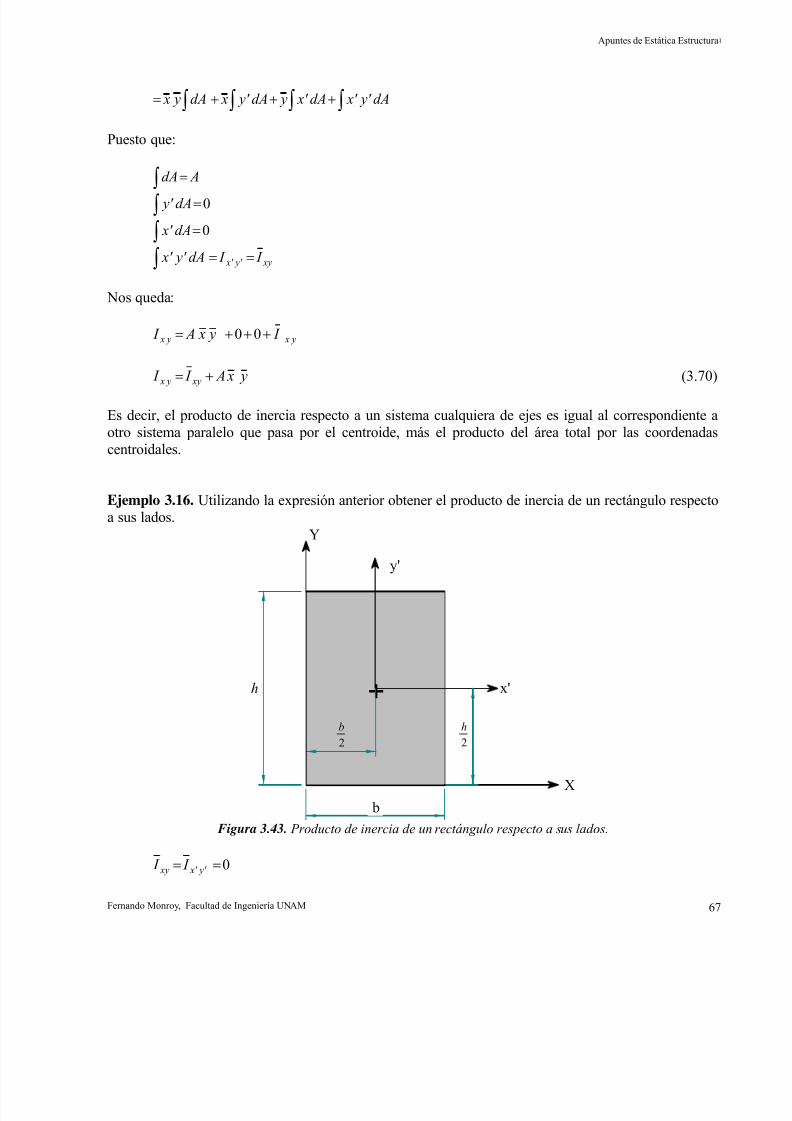
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 74/322
Apuntes de Estática Estructural
dA y' x' dA x' ydA y' xdA y x ∫∫∫∫ +++=
Puesto que:
AdA=
∫ 0=∫ dA y'
0=∫ dA x'
xy y' x' I I dA y' x' ==∫
Nos queda:
y x y x I y x A I +++= 00
y x A I I xy y x += (3.70)
Es decir, el producto de inercia respecto a un sistema cualquiera de ejes es igual al correspondiente aotro sistema paralelo que pasa por el centroide, más el producto del área total por las coordenadascentroidales.
Ejemplo 3.16. Utilizando la expresión anterior obtener el producto de inercia de un rectángulo respectoa sus lados.
x'
y'
+
X
Y
7 0h
3 5
25
50
2b
b
2h
Figura 3.43. Producto de inercia de un rectángulo respecto a sus lados.
0== y' x' xy I I
Fernando Monroy, Facultad de Ingeniería UNAM 67
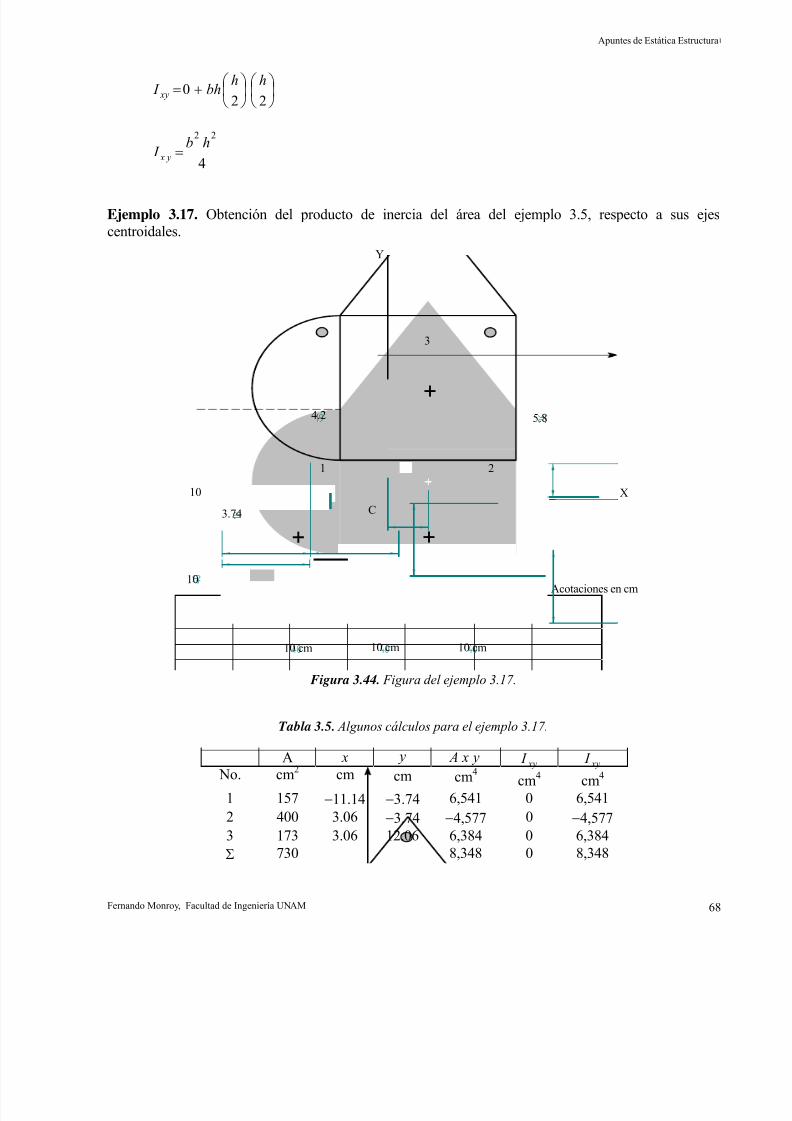
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 75/322
Apuntes de Estática Estructural
⎟ ⎠
⎞⎜⎝
⎛ ⎟
⎠
⎞⎜⎝
⎛ +=
220
hhbh I xy
4
22hb
I y x =
Ejemplo 3.17. Obtención del producto de inercia del área del ejemplo 3.5, respecto a sus ejescentroidales.
X
Y
+
C
Acotaciones en cm03.06
4 010
4 010
40 4010 cm 10 cm
+
+
4010 cm
194.2 2 6
1 83.74
3
1 2
5.8
Figura 3.44. Figura del ejemplo 3.17.
Tabla 3.5. Algunos cálculos para el ejemplo 3.17.
No.A
cm2 x cm
y cm
y x Acm4
xy I cm4
xy I cm4
1 157 −11.14 −3.74 6,541 0 6,5412 400 3.06 −3.74 −4,577 0 −4,5773 173 3.06 12.06 6,384 0 6,384Σ 730 8,348 0 8,348
Fernando Monroy, Facultad de Ingeniería UNAM 68
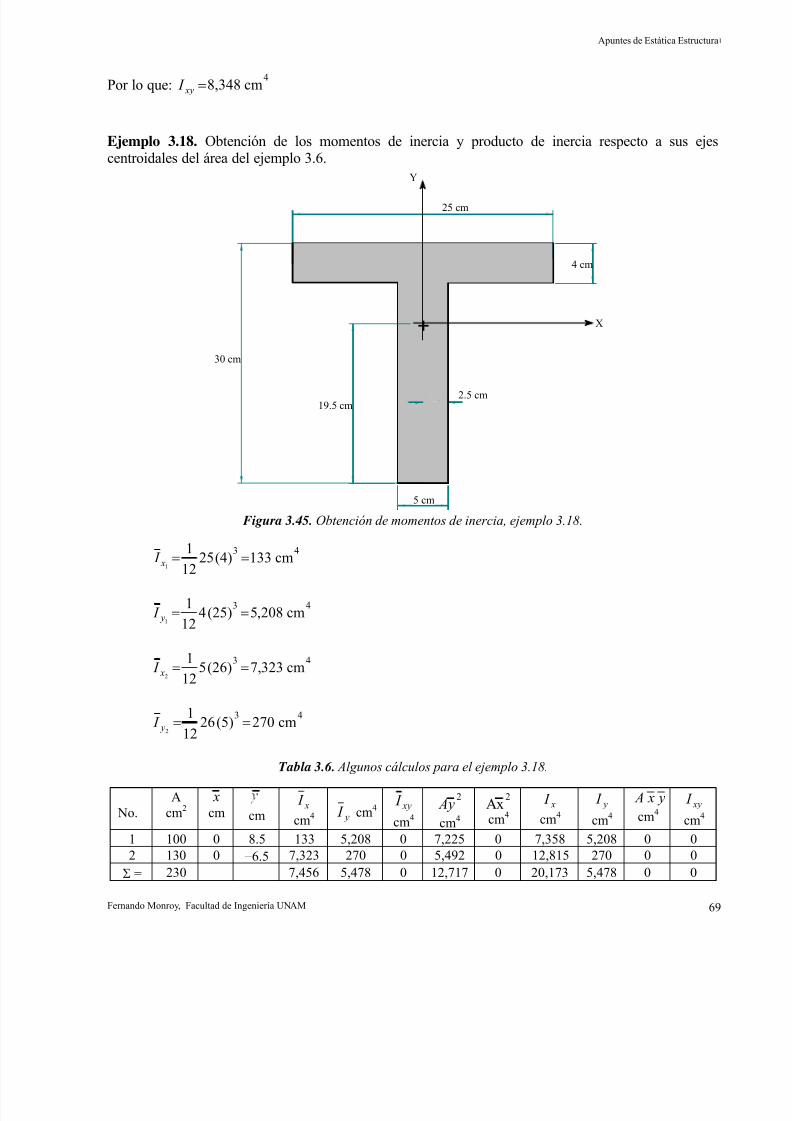
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 76/322
Apuntes de Estática Estructural
Por lo que:4
cm8,348= xy I
Ejemplo 3.18. Obtención de los momentos de inercia y producto de inercia respecto a sus ejescentroidales del área del ejemplo 3.6.
+
2.5 cm
X
Y
1 2 030 cm
8 019.5 cm
255 cm
13
13025 cm
2 04 cm
Figura 3.45. Obtención de momentos de inercia, ejemplo 3.18.
43
cm133(4)2512
11
== x I
43cm208,5(25)4
12
11
== y I
43cm323,7(26)5
12
12
== x I
43cm270(5)26
12
12
== y I
Tabla 3.6. Algunos cálculos para el ejemplo 3.18.
No.A
cm2 x cm cm
x I
cm4
y I cm4 xy I
cm4
2 y A
cm4
2xA
cm4 x I
cm4 y I
cm4
y x Acm4
xy I
cm4
1 100 0 8.5 133 5,208 0 7,225 0 7,358 5,208 0 02 130 0 −6.5 7,323 270 0 5,492 0 12,815 270 0 0
Σ = 230 7,456 5,478 0 12,717 0 20,173 5,478 0 0
Fernando Monroy, Facultad de Ingeniería UNAM 69
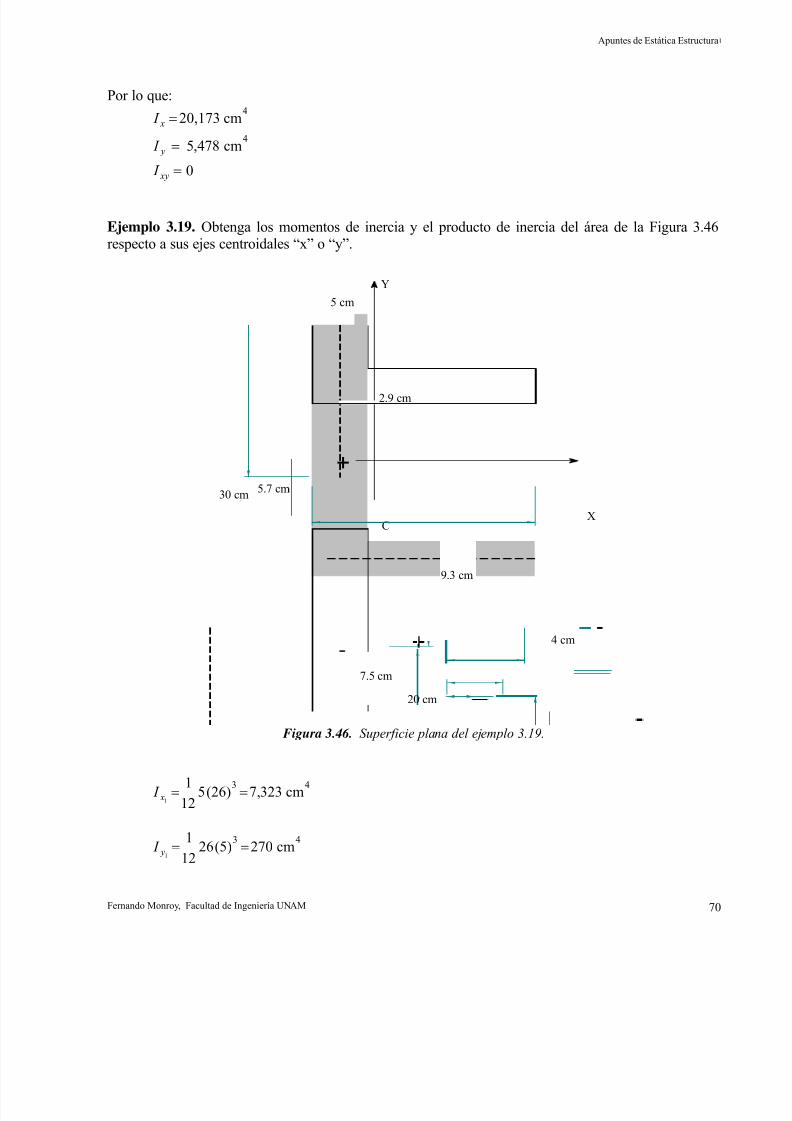
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 77/322
Apuntes de Estática Estructural
Por lo que:
0
cm784,5
cm20,1734
4
=
=
=
xy
y
x
I
I
I
Ejemplo 3.19. Obtenga los momentos de inercia y el producto de inercia del área de la Figura 3.46respecto a sus ejes centroidales “x” o “y”.
+
C
Y
X
+
5 69.3 cm
2 04 cm
10020 cm
357.5 cm
1 4 930 cm
122.9 cm
255 cm
2 45.7 cm
Figura 3.46. Superficie plana del ejemplo 3.19.
43cm323,7(26)5
12
11
== x I
43cm270(5)26
12
11
== y I
Fernando Monroy, Facultad de Ingeniería UNAM 70
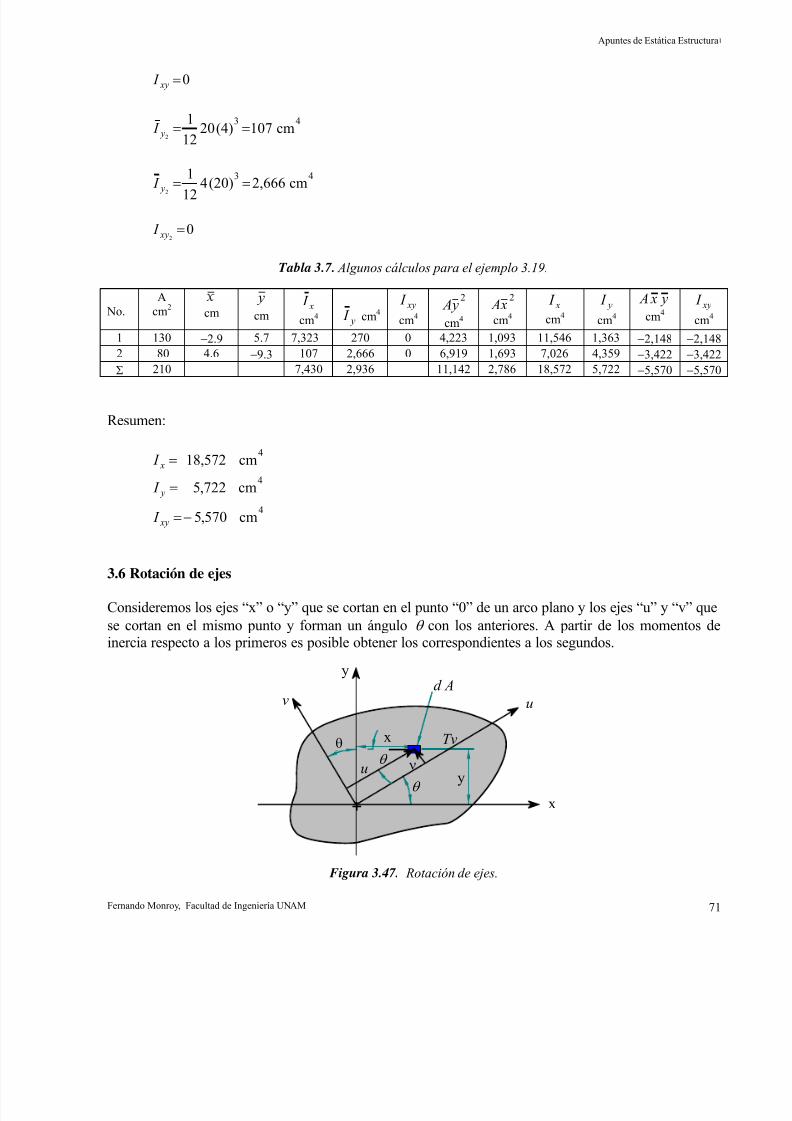
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 78/322
Apuntes de Estática Estructural
0= xy I
43
cm710(4)2012
12
== y I
43
cm2,666(20)412
12 == y I
02
= xy I
Tabla 3.7. Algunos cálculos para el ejemplo 3.19.
No.A
cm2
cm y
cm x I
cm4
y I cm4 xy I
cm4
2 y A
cm4
2 x A
cm4 x I
cm4 y I
cm4
y x Acm4
xy I
cm4
1 130 −2.9 5.7 7,323 270 0 4,223 1,093 11,546 1,363 −2,148 −2,1482 80 4.6 −9.3 107 2,666 0 6,919 1,693 7,026 4,359 −3,422 −3,422Σ
210 7,430 2,936 11,142 2,786 18,572 5,722 −
5,570−
5,570
Resumen:
4
4
4
cm570,5
cm722,5
cm18,572
−=
=
=
xy
y
x
I
I
I
3.6 Rotación de ejes
Consideremos los ejes “x” o “y” que se cortan en el punto “0” de un arco plano y los ejes “u” y “v” quese cortan en el mismo punto y forman un ángulo θ con los anteriores. A partir de los momentos deinercia respecto a los primeros es posible obtener los correspondientes a los segundos.
Fernando Monroy, Facultad de Ingeniería UNAM 71
d A
+
y
x
Tv
uv
u
21x
2 0 y3
1 ° θ
3 1 °θ3 0
° θ ν
Figura 3.47. Rotación de ejes.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 79/322
Apuntes de Estática Estructural
De la Figura 3.47 se pueden establecer las relaciones siguientes:
θ θ
θ θ
sen xcos yv
sen ycos xu
−=
+=
El momento de inercia respecto al eje u
dAv Iu ∫=2
dA sen x x sen y coscos ydA x sencos y )2()(2222θ θ θ θ θ θ +−=−= ∫∫
dA x ycos sendA x sendA ycos ∫∫∫ −+= θ θ θ θ 22222
(3.71)θ θ θ θ cos xy sen I sen Iy Ixcos Iu 222
−+=
Pero:
θ θ θ 22 sencos sen =
2
21;
2
21 22 θ θ
θ θ
cos sen
coscos
−=
+=
Por lo tanto:
)2(2
212
21 θ θ θ sen Ixycos Iycos Ix Iu −⎟ ⎠ ⎞⎜
⎝ ⎛ −+⎟
⎠ ⎞⎜
⎝ ⎛ +=
θ θ 2222
sen Ixycos Iy Ix Iy Ix
Iu −−
++
= (3.72)
Con las expresiones 3.71 ó 3.72 se puede obtener el valor de Iu en función de Ix, Iy, Ixy, y θ. En lamisma forma el momento de inercia respecto al eje v es:
dAu Iv ∫=2
dA y sencos x2
)( θ θ += ∫
dA sen y sen xycoscos x )2(2222θ θ θ θ ++= ∫
dA xy sencosdA y sendA xcos ∫∫∫ ++= θ θ θ θ 22222
Fernando Monroy, Facultad de Ingeniería UNAM 72

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 80/322
Apuntes de Estática Estructural
(3.73)θ θ θ θ cos xy sen I cos Iy Ix sen Iv 222
++=
Pero:
θ θ θ 22 sencos sen =
221;
221 22 θ
θ θ
θ cos sencoscos −=+=
Por lo tanto:
)2(2
21
2
21θ
θ θ sen Ixy
cos Iy
cos Ix Iv +⎟
⎠
⎞⎜⎝
⎛ ++⎟
⎠
⎞⎜⎝
⎛ −=
θ θ 2222
sen Ixycos Ix- Iy Iy Ix
Iv +++
= (3.74)
Con las expresiones 3.73 ó 3.74 podemos obtener Iv en función de Ix, Iy, Ixy, y θ. Sumando lasexpresiones 3.72 y 3.74 se obtiene:
Iu + Iv = Ix + Iy = Ip.
Es decir, para un punto dado de un área, la suma de los momentos de inercia respecto a dos ejesrectangulares es constante e igual al momento polar de inercia. Además:
== ∫ dAuv Iuv Producto de inercia respecto a los ejes “u” y “v”
dA xsen ycos ysen xcos )]()[( θ θ θ θ −+= ∫
dA sen xy sencos xcos sen ycos xy )(2222θ θ θ θ θ θ −−+= ∫
∫∫∫∫ −−+= xydA sendA x sencosdA ycos sen xydAcos θ θ θ θ θ θ 2222
θ θ θ θ θ θ cos Iy sencos x sen I Ixy sencos Ixy −+−=22
⎟ ⎠ ⎞⎜
⎝ ⎛ −⎟
⎠ ⎞⎜
⎝ ⎛ +⎟
⎠ ⎞⎜
⎝ ⎛ −−⎟
⎠ ⎞⎜
⎝ ⎛ +=
22
22
221
221 θ θ θ θ sen Iy sen Ixcos Ixycos Ixy Iuv
θ θ 2sen2
IyIx2cosIxyIuv ⎟
⎠
⎞⎜⎝
⎛ −+= (3.75)
Fernando Monroy, Facultad de Ingeniería UNAM 73

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 81/322
Apuntes de Estática Estructural
Expresión con la cual se puede obtener Iuv en función de Ix, Iy, Ixy, y θ. Obsérvese que al girar los ejesun ángulo 90º se aumenta 2θ en 180º y el producto de inercia conservando su valor absoluto cambia designo.
3.7 Ejes principales
Para un punto dado de un área, es posible obtener un par de ejes para los cuales el momento de inerciaes máximo y mínimo, dichos ejes se denominan ejes principales.
Puesto que:
θ θ 2222
Ixy sencos Iy Ix Iy Ix
Iu −−
++
=
Derivando respecto a θ
)22()22(2
θ θ cos Ixy sen Iy Ixd θ dIu −−⎟
⎠ ⎞⎜
⎝ ⎛ −=
Igualando a cero para obtener los valores máximo o mínimo.
022( =−−− θ θ cos Ixy2 sen ) Iy Ix
Ix Iy
IxyTan
−=
22θ (3.76)
Con esta expresión se pueden obtener dos valores del ángulo θ , los cuales difieren 90º, que nos dan losvalores máximo o mínimo del momento de inercia, siendo éstos los siguientes:
( ) ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+−
−−±
+=
22 422
Ixy Ix Ix
Ix Iy Iy Ix Iy Ix I minmax,
( ) ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+−
±22 4
2
Ixy Ix Iy
Ixy Ixy
22
2
2 22
2
4
2
42
Ixy Iy)(Ix
Ixy
Ixy Iy)(Ix
Iy)(Ix Iy Ix I minmax,
+−
±
+−
−±
+=
22
22
4(2
4
2 Ixy Iy) Ix
Ixy Iy)(Ix Iy Ix I minmax,
+−
−±
+=
22
22
4(
4
2
1
2 Ixy Iy) Ix
Ixy Iy)(Ix Iy Ix I minmax,
+−
+−±
+=
Fernando Monroy, Facultad de Ingeniería UNAM 74

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 82/322
Apuntes de Estática Estructural
224
2
1
2 Ixy Iy)(Ix
Iy Ix I max +−+
+= (3.77)
224
2
1
2 Ixy Iy)(Ix
Iy Ix I min +−−
+= (3.78)
Con las expresiones anteriores (3.77 y 3.78) podemos obtener los valores máximo y mínimo delmomento de inercia del área respecto a ejes que pasan por un punto dado de ella.
Es conveniente observar que para los ejes principales el producto de inercia es nulo; es decir,substituyendo 3.76 en 3.75:
0
4
2
24
22
122
=
+−
−+
+−
−=
Ixy Ix)(Iy
Ixy Iy Ix
Ixy Ix)(Iy
Ix Iy Ixy Iuv
Por lo que los ejes de simetría son principales, pero no todos los ejes principales son de simetría.
3.7.1 Círculo de Mohr
De la expresión 3.72 antes presentada
θ θ 2222
sen Ixycos Iy- Ix Iy Ix
Iu −=+
−
Y la expresión 3.75, la cual se muestra a continuación
θ 22θ2
cos Ixy sen Iy Ix
Iuv +−
=
Podemos elevar al cuadrado las dos expresiones anteriores y obtener, para la primera:
θ sen Ixyθ θ cos Ixy sen Iy) Ixθ cos Iy Ix Iy Ix
Iu 222(222
22222
+−−⎟ ⎠
⎞⎜⎝
⎛ −=⎟
⎠
⎞⎜⎝
⎛ +−
Para la segunda:
)22)222
222222
22
2θ cosθ (sen Ixyθ cos(sen
Iy Ixuv I
Iy Ixuv I +++⎟
⎠
⎞⎜⎝
⎛ −=+⎟
⎠
⎞⎜⎝
⎛ −= θ
22
22
22 Ixy
Iy Ix Iuv
Iy Ix Iu +⎟
⎠
⎞⎜⎝
⎛ −=+⎟
⎠
⎞⎜⎝
⎛ +−
Fernando Monroy, Facultad de Ingeniería UNAM 75
Observando esta expresión podemos ver que se trata de la ecuación de una circunferencia, relacionandolas variables Iu y Iuv, el centro C y el radio R se expresan por:
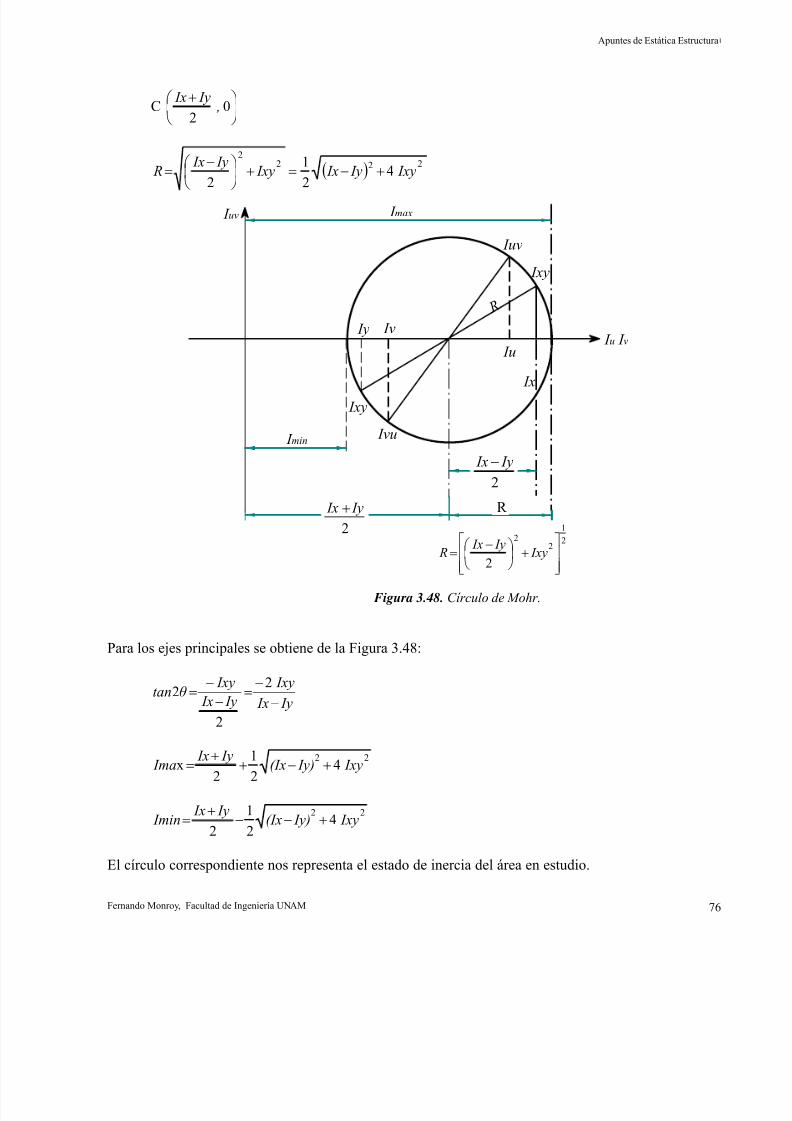
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 83/322
Apuntes de Estática Estructural
C ⎟ ⎠
⎞⎜⎝
⎛ +0
2 ,
Iy Ix
( ) 2222
4
2
1
2
Ixy Iy Ix Ixy Iy Ix
R +−=+⎟
⎠
⎞⎜
⎝
⎛ −=
Iy Iv
Iu
Ix
Ixy
Ivu
Iuv
Ixy
2
1
22
2 ⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡+⎟
⎠
⎞⎜
⎝
⎛ −= Ixy
Iy Ix R
111 I max I uv
37 I min
74
2
Iy Ix +
32
37R
2
Iy Ix −
R
I u I v
Figura 3.48. Círculo de Mohr.
Para los ejes principales se obtiene de la Figura 3.48:
Iy Ix
Ixy Iy Ix
Ixyθ tan
−
−=
−
−=
2
2
2
224
21
2x Ixy Iy)(Ix Iy Ix Ima +−++=
224
2
1
2 Ixy Iy)(Ix
Iy Ix Imin +−−
+=
El círculo correspondiente nos representa el estado de inercia del área en estudio.
Fernando Monroy, Facultad de Ingeniería UNAM 76

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 84/322
Apuntes de Estática Estructural
Ejemplo 3.20. Obtención de los ejes principales centroidales y los momentos de inercia máximo ymínimo de la figura de los ejemplos 3.13 y 3.17.
X
Y
0
3.74 cm
20 cm
4 0
4 0
40 4040
10 cm
10 cm
10 cm 10 cm 10 cm
18
3.06 cm
0
5 6 °
2 4 ° 'o
3028
'o3061
Figura 3.49. Superficie plana del ejemplo 3.20.
Anteriormente se obtuvo:
Ix = 53,088 cm4 Iy = 4,222 cm4 Ixy = 8,348 cm4
De acuerdo con estos valores, podemos obtener la inclinación de los ejes principales en la siguienteforma:
54.1866,10
696,16
088,53222,42
)348,8(22 −=
−=
−=θ tan ; 2θ = ang tan (−1.54) ; 2θ = − 57º 00’ 123º 00’
θ = − 28º 30’ 61º 30’
Los valores máximos de los momentos de inercia se obtienen de la siguiente forma:
22)348,8(4)866,10(
2
1
2
222,42088,53+±
+=minmax, I
Fernando Monroy, Facultad de Ingeniería UNAM 77
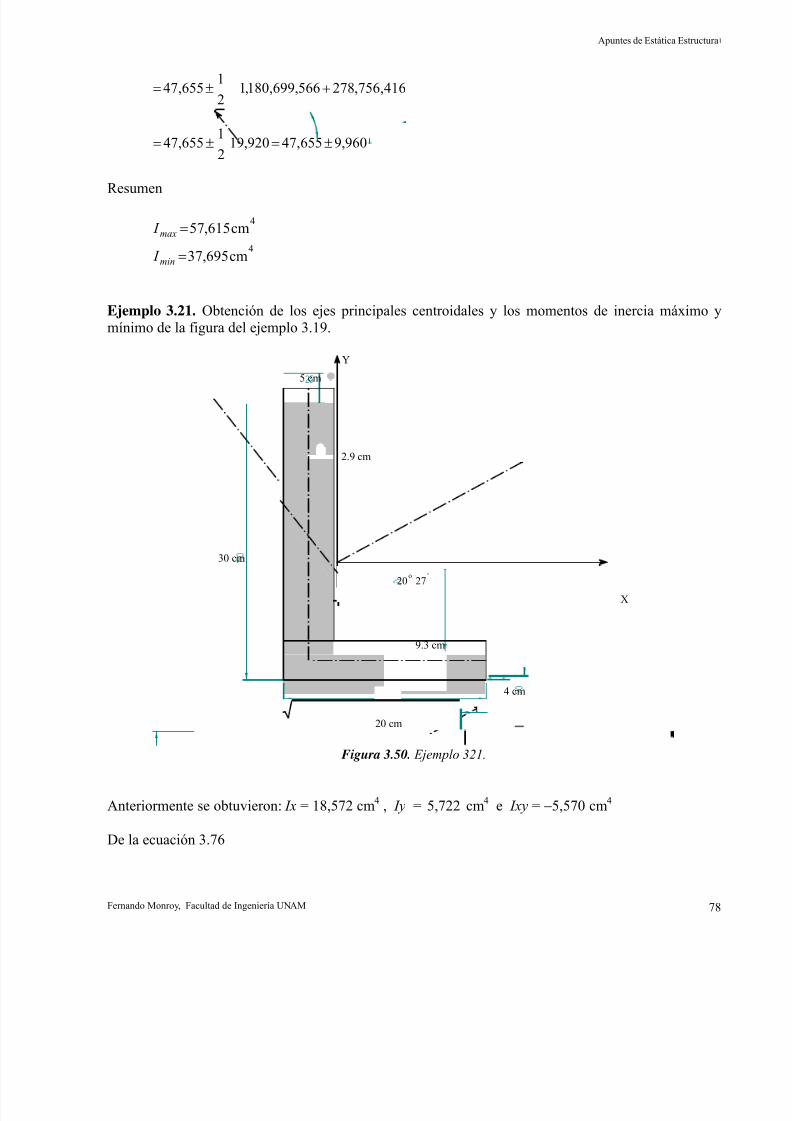
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 85/322
Apuntes de Estática Estructural
416,756,278566,699,180,12
1655,47 +±=
960,9655,47920,192
1655,47 ±=±=
Resumen
4
4
cm695,37
cm615,57
=
=
min
max
I
I
Ejemplo 3.21. Obtención de los ejes principales centroidales y los momentos de inercia máximo ymínimo de la figura del ejemplo 3.19.
+
Y
X
2.9 cm
255 cm
0
0 °
'o2720
4 59.3 cm
2 04 cm
1 5 0
100
30 cm
20 cm
Figura 3.50. Ejemplo 321.
Anteriormente se obtuvieron: Ix = 18,572 cm4 , Iy = 5,722 cm4 e Ixy = −5,570 cm4
De la ecuación 3.76
Fernando Monroy, Facultad de Ingeniería UNAM 78
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 86/322
Apuntes de Estática Estructural
8669.0850,12
140,11
572,18722,5
)570,5(22 =
−
−=
−
−=θ tan ; 2θ = ang tan (.8695); 2θ = 40º 55’; 220º 55’
θ = 20º 27’; 110º 27’
)5540(2
5,72218,572
2
5,72218,572
I
'o
27'20o cos
−+
+=
– (–5,570 ( sen 40º 55’))
= 12,147 + 6,425 (0.7557) +5,570(0.6548)
= 12,147 + 4,855 + 3,648
= 27'20
o I 20,650 cm4 = I max
= 27'110
o I 12,147 + 6,425 (cos 220º 55’) + (–5,570 ( sen 220º 55’))
= 12,147 – 6,425 (0.7557) – 5,570 (0.6548)
= 12,147 – 4,855 – 3,648
= 27'110
o I 3,645 cm4 = I min
Comprobación
De las ecuaciones (3.77) y (3.78)
22
)570,5(4)850,12(21147,12 −++=max I
600,099,124000,122,1652
1147,12 +±= 600,221,289
2
1147,12 +=
= 12,147 + 8,503
4cm650,20=max I
4
cm644,3503,8147,12 =−=min I
En resumen
'o42720 paracm650,20 == θ I max
'o427110 paracm645,3 == θ I min
Fernando Monroy, Facultad de Ingeniería UNAM 79
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 87/322
Apuntes de Estática Estructural
EQUILIBRIO DE SISTEMAS
DE FUERZAS Y DE CUERPOS
4.1 Sistema de fuerzas en equilibrio
De acuerdo con las expresiones obtenidas para obtener la resultante de un sistema de fuerzas en generaly tomando en cuenta que existe equilibrio cuando la resultante es cero, se llega a las siguientes
ecuaciones para analizar el equilibrio de un sistema de fuerzas en general:
0= F Σ r
0
0
0
=
=
=
z
y
x
F Σ
F Σ
F Σ
(4.1)
00 = M Σ r
0
0
0
=
=
=
z
y
x
M Σ
M Σ
M Σ
Es decir, se cuenta con dos ecuaciones vectoriales o seis ecuaciones escalares para un problema generalde equilibrio, por lo que, se pueden tener como máximo seis incógnitas en un problema de este tipo,estas pudieran ser, por ejemplo, las reacciones en los apoyos de la estructura.
4.1.1 Equilibrio de un sistema de fuerzas concurrentes
Puesto que todas las fuerzas pasan por el punto “0”, se eliminan las ecuaciones de momentos y laresultante es una fuerza única (Figura 4.1).
Fernando Monroy, Facultad de Ingeniería UNAM 80
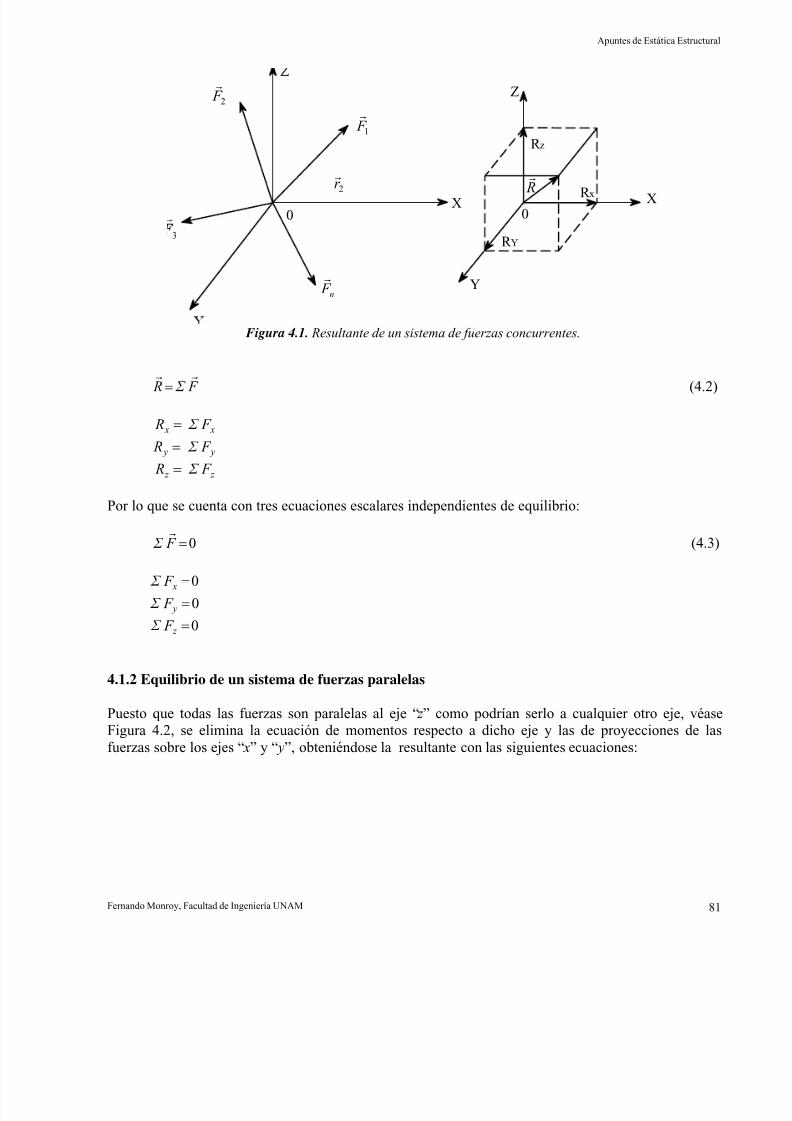
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 88/322
Apuntes de Estática Estructural
R x X
Y
Z
X0 0
R z
R Y
2 F r
1 F r
3
n F r
2r
r
R
r
Figura 4.1. Resultante de un sistema de fuerzas concurrentes.
F Σ Rrr
= (4.2)
z
y
x
z
y
x
F Σ
F Σ
F Σ
R
R
R
=
=
=
Por lo que se cuenta con tres ecuaciones escalares independientes de equilibrio:
0= F Σ r
(4.3)
0
0
0
=
=
=
z
y
x
F Σ
F Σ
F Σ
4.1.2 Equilibrio de un sistema de fuerzas paralelas
Puesto que todas las fuerzas son paralelas al eje “ z” como podrían serlo a cualquier otro eje, véaseFigura 4.2, se elimina la ecuación de momentos respecto a dicho eje y las de proyecciones de las
fuerzas sobre los ejes “ x” y “ y”, obteniéndose la resultante con las siguientes ecuaciones:
Fernando Monroy, Facultad de Ingeniería UNAM 81
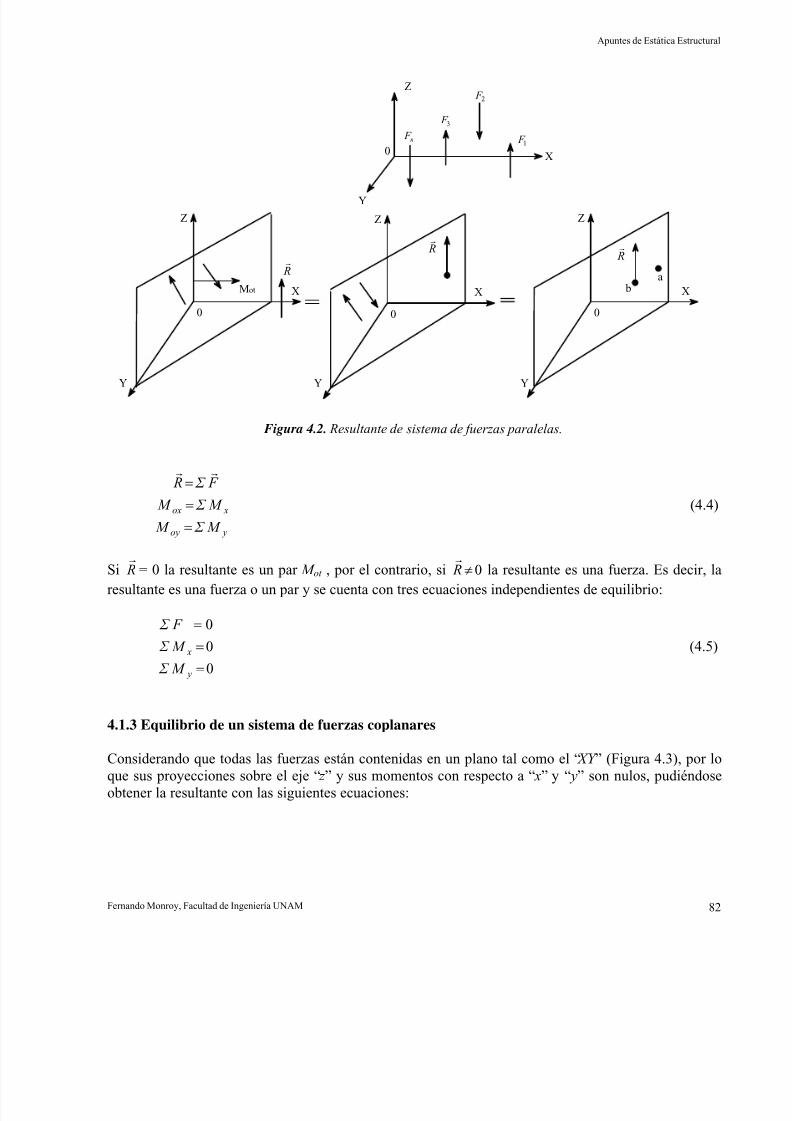
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 89/322
Apuntes de Estática Estructural
Y
X0
Z
a
0
Y
Z
X
0
Y
Z
Mot X
0
Y
Z
X b
Rr
Rr
Rr
2 F
n F 3 F
1 F
Figura 4.2. Resultante de sistema de fuerzas paralelas.
(4.4)
yoy
xox
M Σ M
M Σ M
F Σ R
=
=
= rr
Si Rr
= 0 la resultante es un par M ot , por el contrario, si 0≠ Rr
la resultante es una fuerza. Es decir, laresultante es una fuerza o un par y se cuenta con tres ecuaciones independientes de equilibrio:
0
0
0
=
=
=
y
x
M Σ
M Σ
F Σ
(4.5)
4.1.3 Equilibrio de un sistema de fuerzas coplanares
Considerando que todas las fuerzas están contenidas en un plano tal como el “ XY ” (Figura 4.3), por loque sus proyecciones sobre el eje “ z” y sus momentos con respecto a “ x” y “ y” son nulos, pudiéndoseobtener la resultante con las siguientes ecuaciones:
Fernando Monroy, Facultad de Ingeniería UNAM 82

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 90/322
Apuntes de Estática Estructural
X0
Y
Fn
Fn
M1
F2
Mm
M2
F1
Figura 4.3. Equilibrio de un sistema de fuerzas coplanares.
(4.6)
0 M Σ M
F Σ R
F Σ R
ot
y y
x x
=
=
=
Puesto que una fuerza y un par coplanares siempre se pueden sumar dándonos una fuerza única,concluimos que la resultante de un sistema de este tipo es una fuerza o un par. Se cuenta, en este caso,con tres ecuaciones independientes de equilibrio:
(4.7)
0
0
0
0 =
=
=
M Σ
F Σ
F Σ
y
x
4.1.4 Equilibrio de un sistema de fuerzas concurrentes coplanares.Z
F4
F1
Fn
0
F2
Y
F3
Figura 4.4. Sistema de fuerzas concurrentes y coplanares.
La resultante del sistema se obtiene utilizando:
y y
x x
F Σ R
F Σ R
=
= (4.8)
Fernando Monroy, Facultad de Ingeniería UNAM 83

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 91/322
Apuntes de Estática Estructural
Las ecuaciones de equilibrio quedan expresadas por:
(4.9)0
0
=Σ
=Σ
y
x
F
F
Es decir, se dispone de dos ecuaciones independientes de equilibrio.
4.1.5 Equilibrio de un sistema de fuerzas coplanares paralelas
Resultante
0 M Σ M
F Σ R
ot =
= (4.10)
Equilibrio
0
0
0 ==
==
M Σ M
F Σ R
ot
(4.11)
Es decir, se cuenta con dos ecuaciones independientes de equilibrio.
X0
YFn
F1
F3
F2
Figura 4.5. Fuerzas coplanares y paralelas.
4.1.6 Ecuaciones independientes de equilibrio.
Cualquier ecuación de equilibrio adicional que se establezca es combinación lineal de las antesmencionadas, lo cual queda demostrado a continuación (Figura 4.6).
Tomando en cuenta el sistema de ejes (x, y, z), las ecuaciones de equilibrio para el sistema de fuerzasindicadas en la Figura 4.6 son:
0=i F Σ r
(4.12)
Fernando Monroy, Facultad de Ingeniería UNAM 84
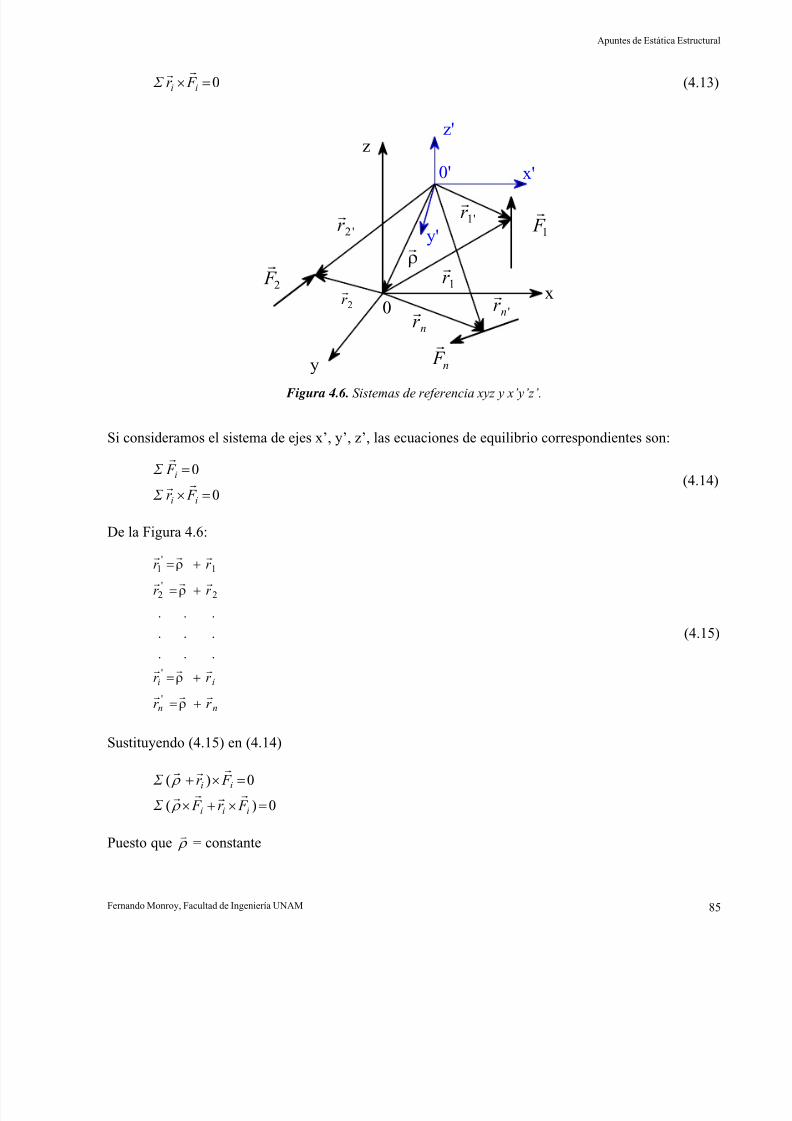
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 92/322
Apuntes de Estática Estructural
0=× ii F r Σ r
r
(4.13)
x'
x
y'
0'
z'z
y
0
2 F r
2r r
'2r r '1r
r
1r r
nr r
ρr
n F r
'nr r
1 F r
Figura 4.6. Sistemas de referencia xyz y x’y’z’.
Si consideramos el sistema de ejes x’, y’, z’, las ecuaciones de equilibrio correspondientes son:
(4.14)0
0
=×
=
ii
i
F r Σ
F Σ r
r
r
De la Figura 4.6:
nn
ii
r r
r r
r r r r
rrr
rrr
rrr
rrr
+ρ=
+ρ=
+ρ=+ρ=
'
'
2'
2
1'1
...
...
...
(4.15)
Sustituyendo (4.15) en (4.14)
0)(
0)(
=×+×
=×+
iii
ii
F r F Σ
F r Σ r
r
r
r
r
rr
ρ
ρ
Puesto que ρ
v
= constante
Fernando Monroy, Facultad de Ingeniería UNAM 85
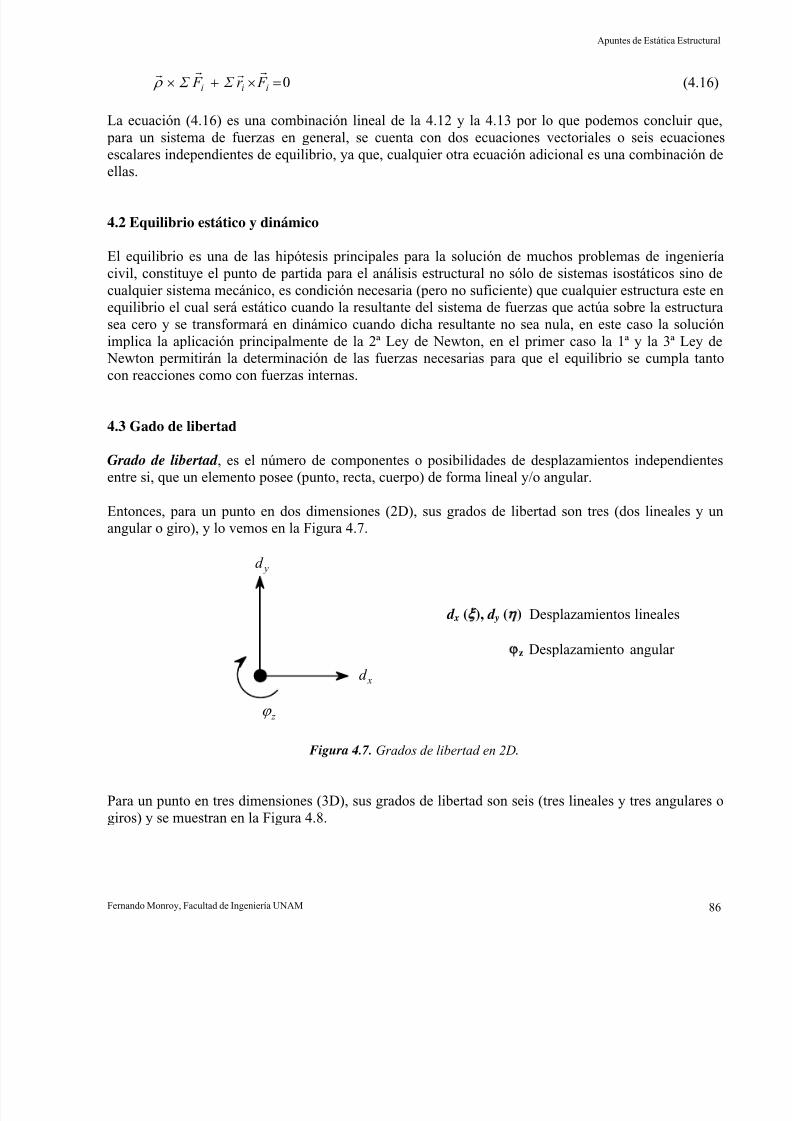
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 93/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 86
0=×+× iii F r Σ F Σ r
r
r
r
ρ (4.16)
La ecuación (4.16) es una combinación lineal de la 4.12 y la 4.13 por lo que podemos concluir que, para un sistema de fuerzas en general, se cuenta con dos ecuaciones vectoriales o seis ecuacionesescalares independientes de equilibrio, ya que, cualquier otra ecuación adicional es una combinación deellas.
4.2 Equilibrio estático y dinámico
El equilibrio es una de las hipótesis principales para la solución de muchos problemas de ingenieríacivil, constituye el punto de partida para el análisis estructural no sólo de sistemas isostáticos sino decualquier sistema mecánico, es condición necesaria (pero no suficiente) que cualquier estructura este enequilibrio el cual será estático cuando la resultante del sistema de fuerzas que actúa sobre la estructurasea cero y se transformará en dinámico cuando dicha resultante no sea nula, en este caso la soluciónimplica la aplicación principalmente de la 2ª Ley de Newton, en el primer caso la 1ª y la 3ª Ley de Newton permitirán la determinación de las fuerzas necesarias para que el equilibrio se cumpla tanto
con reacciones como con fuerzas internas.
4.3 Gado de libertad
Grado de libertad , es el número de componentes o posibilidades de desplazamientos independientesentre si, que un elemento posee (punto, recta, cuerpo) de forma lineal y/o angular.
Entonces, para un punto en dos dimensiones (2D), sus grados de libertad son tres (dos lineales y unangular o giro), y lo vemos en la Figura 4.7.
yd
xd
zϕ
d x (ξ), d y ( ) Desplazamientos lineales
z Desplazamiento angular
Figura 4.7. Grados de libertad en 2D.
Para un punto en tres dimensiones (3D), sus grados de libertad son seis (tres lineales y tres angulares ogiros) y se muestran en la Figura 4.8.
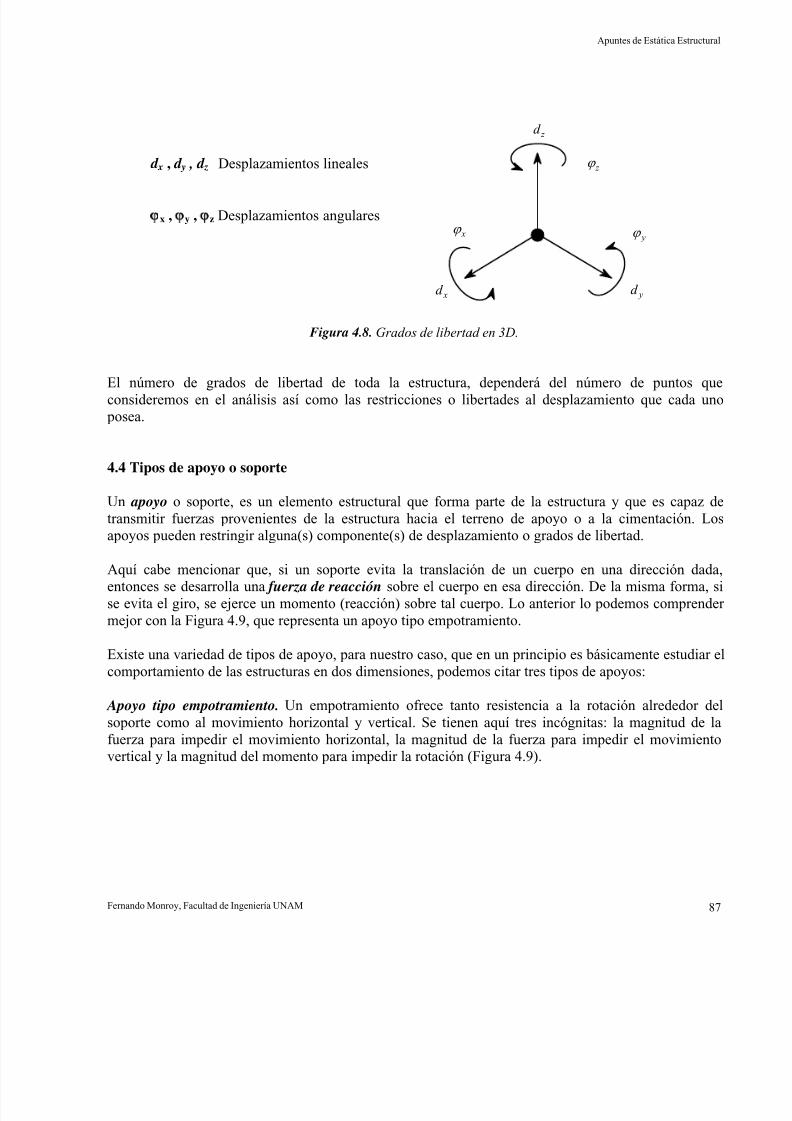
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 94/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 87
zd
zϕ
yd xd
yϕ xϕ
d x , d y , d z Desplazamientos lineales
x , y , z Desplazamientos angulares
Figura 4.8. Grados de libertad en 3D.
El número de grados de libertad de toda la estructura, dependerá del número de puntos queconsideremos en el análisis así como las restricciones o libertades al desplazamiento que cada uno posea.
4.4 Tipos de apoyo o soporte
Un apoyo o soporte, es un elemento estructural que forma parte de la estructura y que es capaz detransmitir fuerzas provenientes de la estructura hacia el terreno de apoyo o a la cimentación. Losapoyos pueden restringir alguna(s) componente(s) de desplazamiento o grados de libertad.
Aquí cabe mencionar que, si un soporte evita la translación de un cuerpo en una dirección dada,entonces se desarrolla una fuerza de reacción sobre el cuerpo en esa dirección. De la misma forma, sise evita el giro, se ejerce un momento (reacción) sobre tal cuerpo. Lo anterior lo podemos comprendermejor con la Figura 4.9, que representa un apoyo tipo empotramiento.
Existe una variedad de tipos de apoyo, para nuestro caso, que en un principio es básicamente estudiar elcomportamiento de las estructuras en dos dimensiones, podemos citar tres tipos de apoyos:
Apoyo tipo empotramiento. Un empotramiento ofrece tanto resistencia a la rotación alrededor delsoporte como al movimiento horizontal y vertical. Se tienen aquí tres incógnitas: la magnitud de lafuerza para impedir el movimiento horizontal, la magnitud de la fuerza para impedir el movimiento
vertical y la magnitud del momento para impedir la rotación (Figura 4.9).
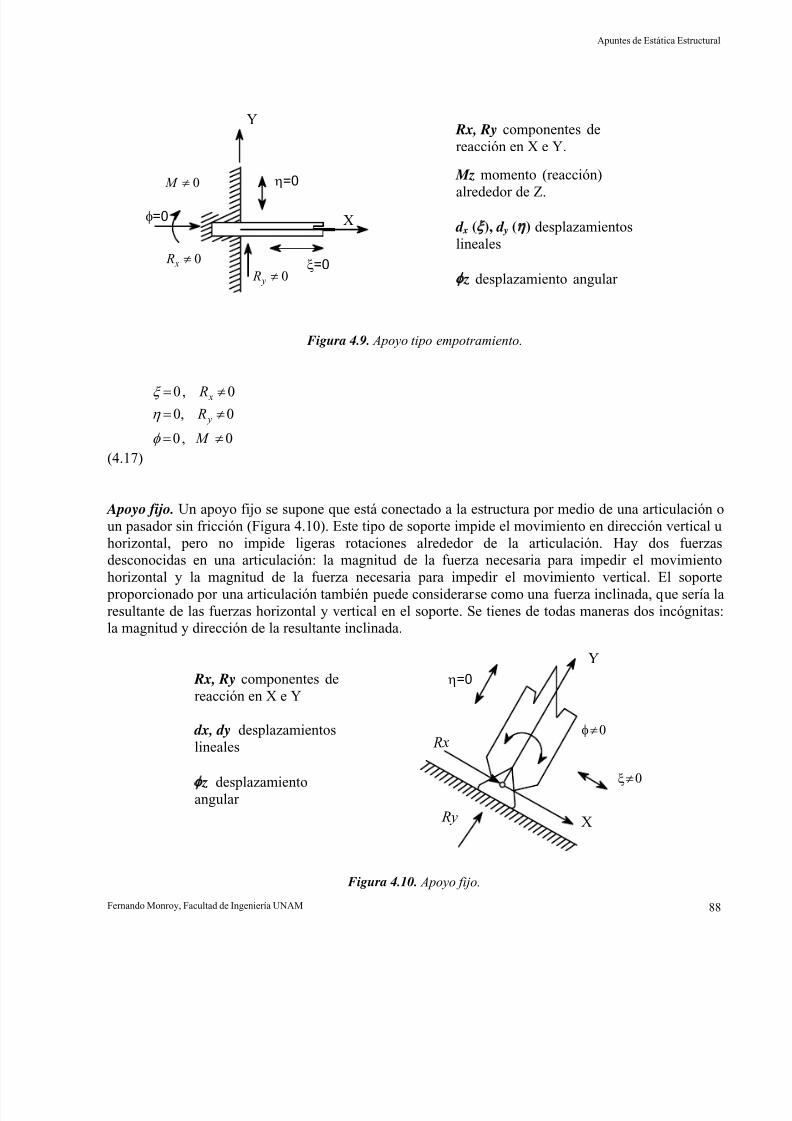
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 95/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 88
φ=0
η 0=
ξ=0
Y
0≠ x R0≠ y R
Rx, Ry componentes dereacción en X e Y.
0≠ M
Mz momento (reacción)
alrededor de Z.
X d x (ξ), d y ( ) desplazamientoslineales
z desplazamiento angular
Figura 4.9. Apoyo tipo empotramiento.
0,0
0,0
0,0
≠=
≠=
≠=
M
R
R
y
x
φ
η
ξ
(4.17)
Y
R x
η=0
R y X
0≠ξ
0≠φ
Apoyo fijo. Un apoyo fijo se supone que está conectado a la estructura por medio de una articulación oun pasador sin fricción (Figura 4.10). Este tipo de soporte impide el movimiento en dirección vertical uhorizontal, pero no impide ligeras rotaciones alrededor de la articulación. Hay dos fuerzas
desconocidas en una articulación: la magnitud de la fuerza necesaria para impedir el movimientohorizontal y la magnitud de la fuerza necesaria para impedir el movimiento vertical. El soporte proporcionado por una articulación también puede considerarse como una fuerza inclinada, que sería laresultante de las fuerzas horizontal y vertical en el soporte. Se tienes de todas maneras dos incógnitas:la magnitud y dirección de la resultante inclinada.
Rx, Ry componentes dereacción en X e Y
dx, dy desplazamientos
lineales
z desplazamientoangular
Figura 4.10. Apoyo fijo.
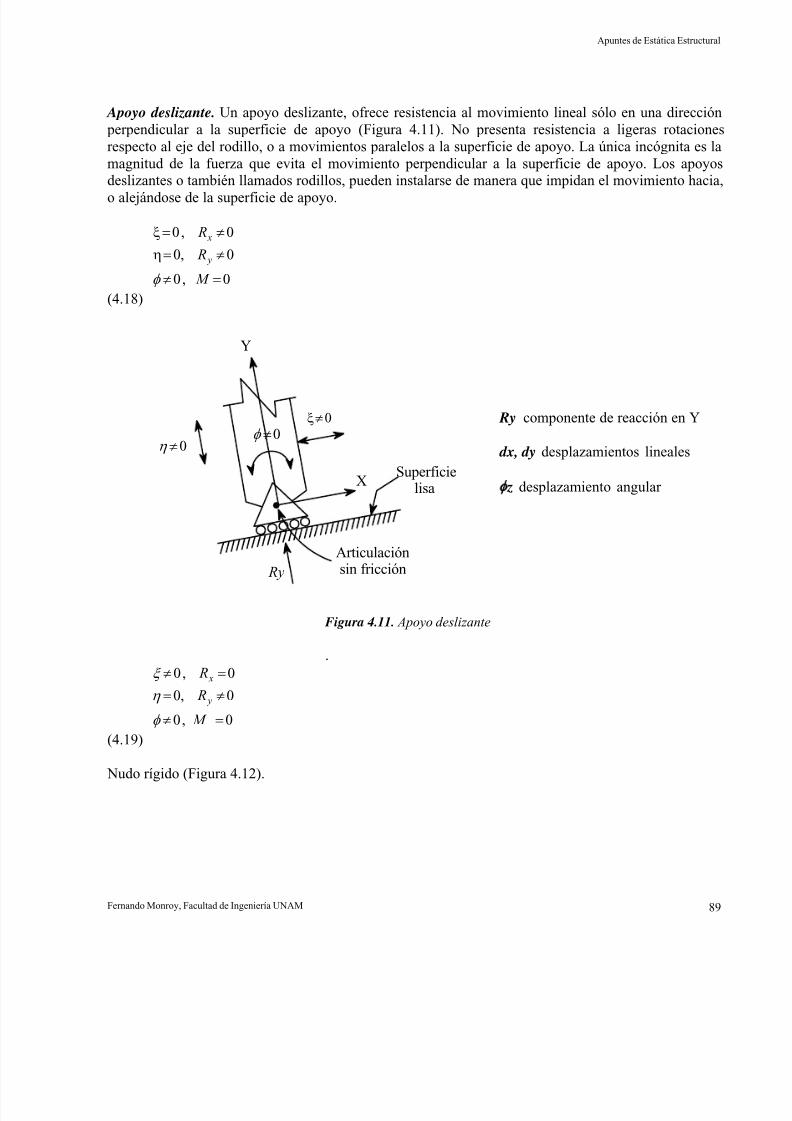
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 96/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 89
Apoyo deslizante. Un apoyo deslizante, ofrece resistencia al movimiento lineal sólo en una dirección perpendicular a la superficie de apoyo (Figura 4.11). No presenta resistencia a ligeras rotacionesrespecto al eje del rodillo, o a movimientos paralelos a la superficie de apoyo. La única incógnita es lamagnitud de la fuerza que evita el movimiento perpendicular a la superficie de apoyo. Los apoyos
deslizantes o también llamados rodillos, pueden instalarse de manera que impidan el movimiento hacia,o alejándose de la superficie de apoyo.
0,0
0,0
0,0
=≠
≠=η
≠=ξ
M
R
R
y
x
φ
(4.18)
X
Y
Ry
Superficie
Ry componente de reacción en Y0≠ξ0≠φ
0≠η dx, dy desplazamientos lineales
lisa
Articulación sin fricción
z desplazamiento angular
Figura 4.11. Apoyo deslizante
.
0,0
0,0
0,0
=≠
≠=
=≠
M
R
R
y
x
φ
η
ξ
(4.19)
Nudo rígido (Figura 4.12).
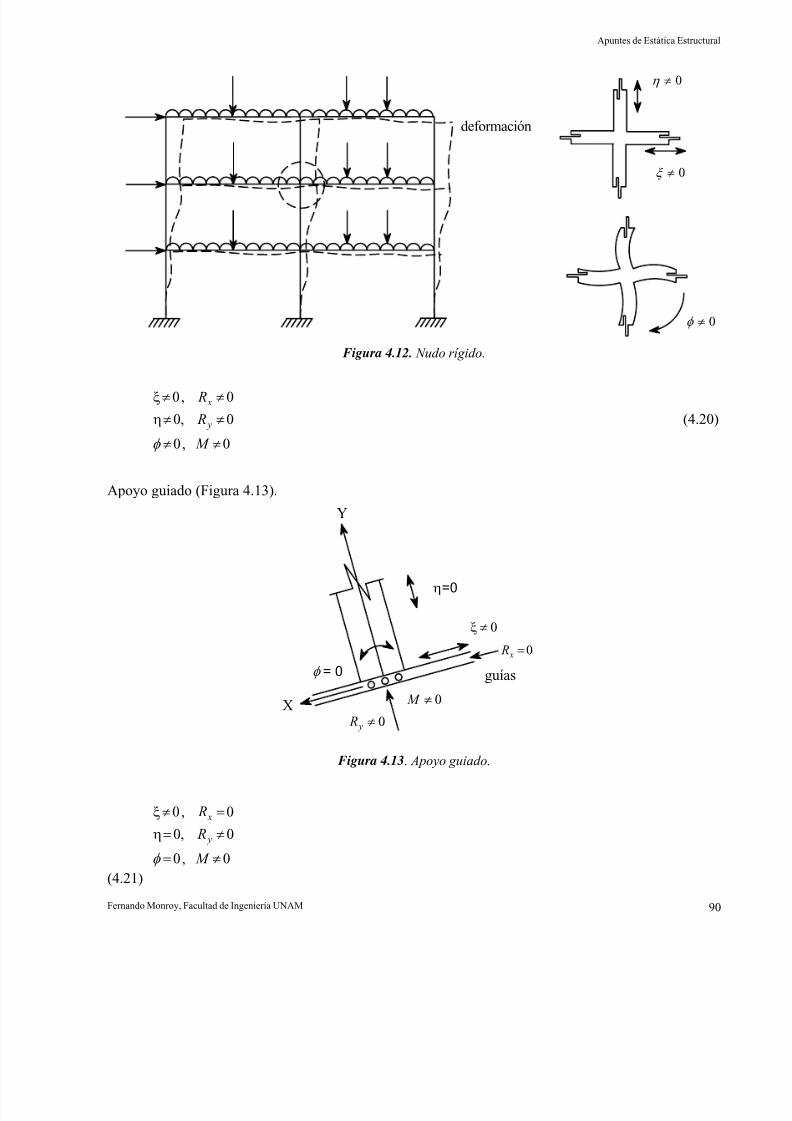
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 97/322
Apuntes de Estática Estructural
deformación
0≠η
0≠ξ
0≠φ
Figura 4.12. Nudo rígido.
0,0
0,0
0,0
≠≠
≠≠η
≠≠ξ
M
R
R
y
x
φ
(4.20)
Apoyo guiado (Figura 4.13).
η=0
Y
guías
X
φ = 0
0≠ M
0≠ y R
0≠ξ
0= x R
Figura 4.13. Apoyo guiado.
0,0
0,0
0,0
≠=
≠=η
=≠ξ
M
R
R
y
x
φ
(4.21)
Fernando Monroy, Facultad de Ingeniería UNAM 90
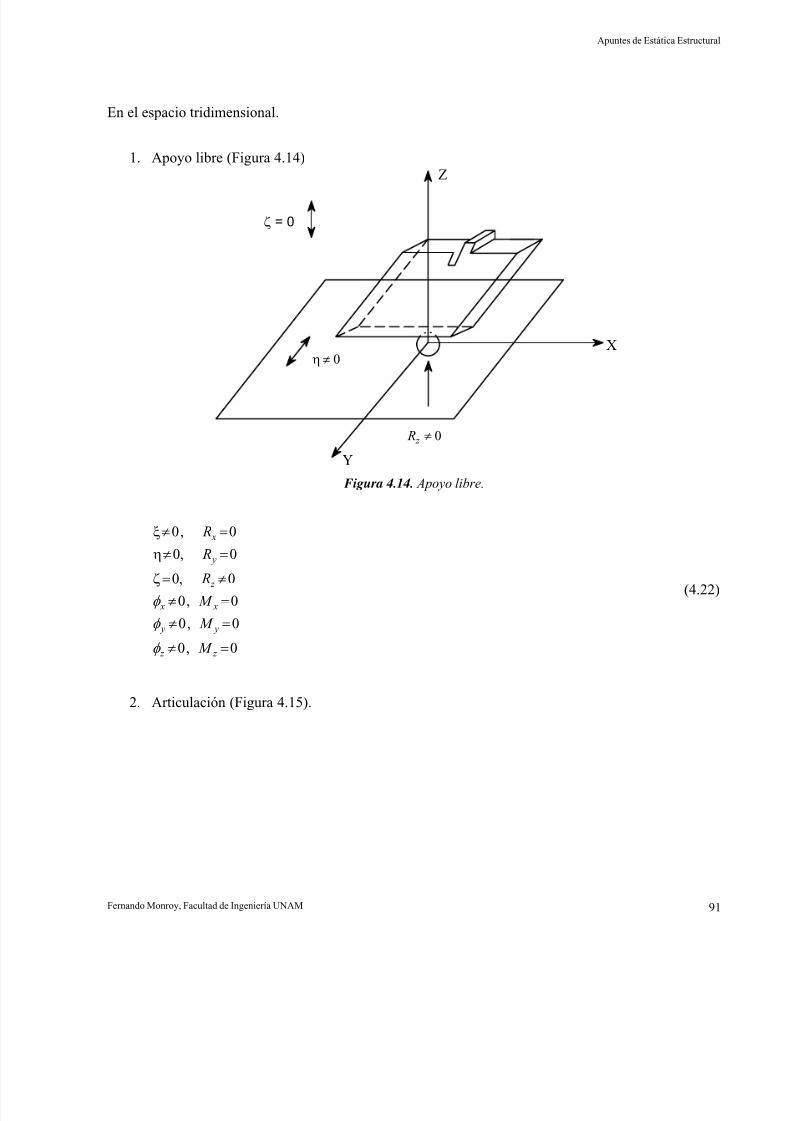
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 98/322
Apuntes de Estática Estructural
En el espacio tridimensional.
1. Apoyo libre (Figura 4.14)Z
X
Y
ζ = 0
0≠η
0≠ z R
Figura 4.14. Apoyo libre.
0,0
0,0
0,0
0,0
0,0
0,0
=≠
=≠
=≠
≠=ζ
=≠η
=≠ξ
z z
y y
x x
z
y
x
M
M
M
R
R
R
φ
φ
φ (4.22)
2. Articulación (Figura 4.15).
Fernando Monroy, Facultad de Ingeniería UNAM 91
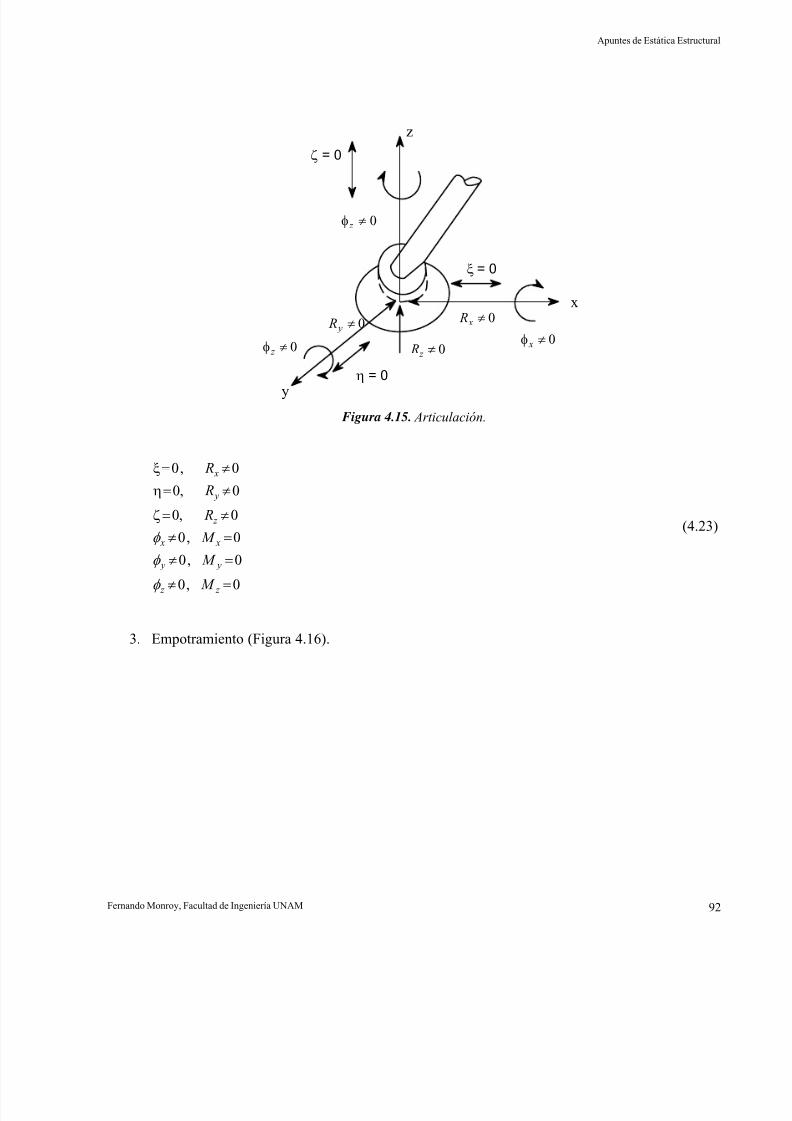
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 99/322
Apuntes de Estática Estructural
ζ = 0
z
ξ = 0
x
y η = 0
0≠φ z
0≠ z R
0≠ y R 0≠ x R
0≠φ x0≠φ z
Figura 4.15. Articulación.
0,00,0
0,0
0,0
0,0
0,0
=≠=≠
=≠
≠=ζ
≠=η
≠=ξ
z z
y y
x x
z
y
x
M M
M
R
R
R
φ φ
φ (4.23)
3. Empotramiento (Figura 4.16).
Fernando Monroy, Facultad de Ingeniería UNAM 92
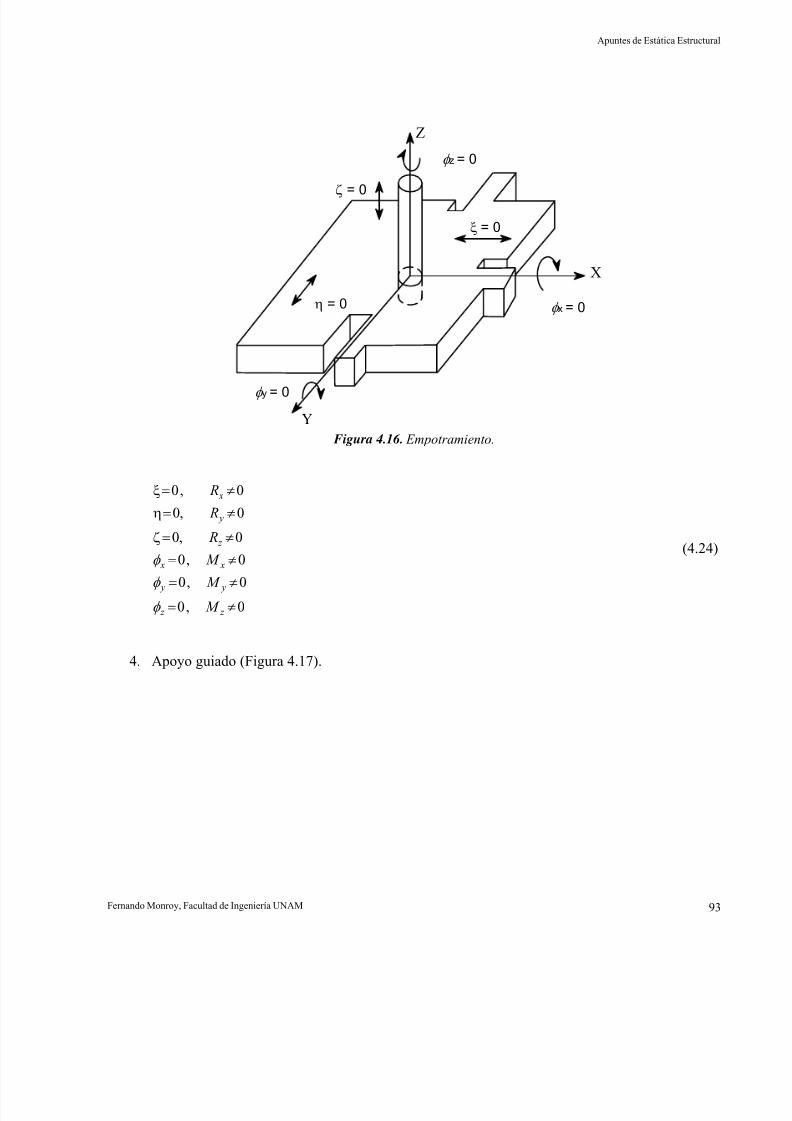
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 100/322
Apuntes de Estática Estructural
Z
X
Y
φ y = 0
φ z = 0
φ x = 0
ξ = 0
ζ = 0
η = 0
Figura 4.16. Empotramiento.
0,0
0,00,0
0,0
0,0
0,0
≠=
≠=≠=
≠=ζ
≠=η
≠=ξ
z z
y y
x x
z
y
x
M
M M
R
R
R
φ
φ φ
(4.24)
4. Apoyo guiado (Figura 4.17).
Fernando Monroy, Facultad de Ingeniería UNAM 93
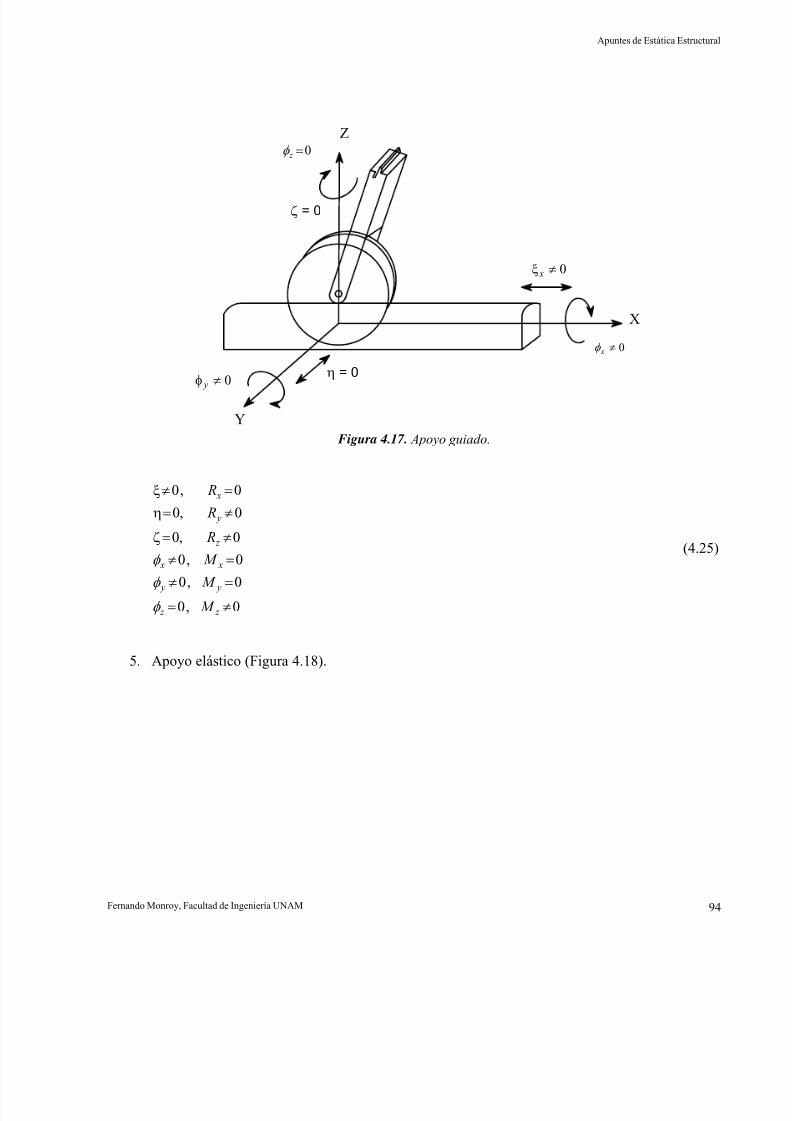
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 101/322
Apuntes de Estática Estructural
ζ = 0
η = 0
X
Y
0≠φ y
0≠ξ x
0≠ xφ
Z0= zφ
Figura 4.17. Apoyo guiado.
0,0
0,00,0
0,0
0,0
0,0
≠=
=≠=≠
≠=ζ
≠=η
=≠ξ
z z
y y
x x
z
y
x
M
M M
R
R
R
φ
φ φ
(4.25)
5. Apoyo elástico (Figura 4.18).
Fernando Monroy, Facultad de Ingeniería UNAM 94
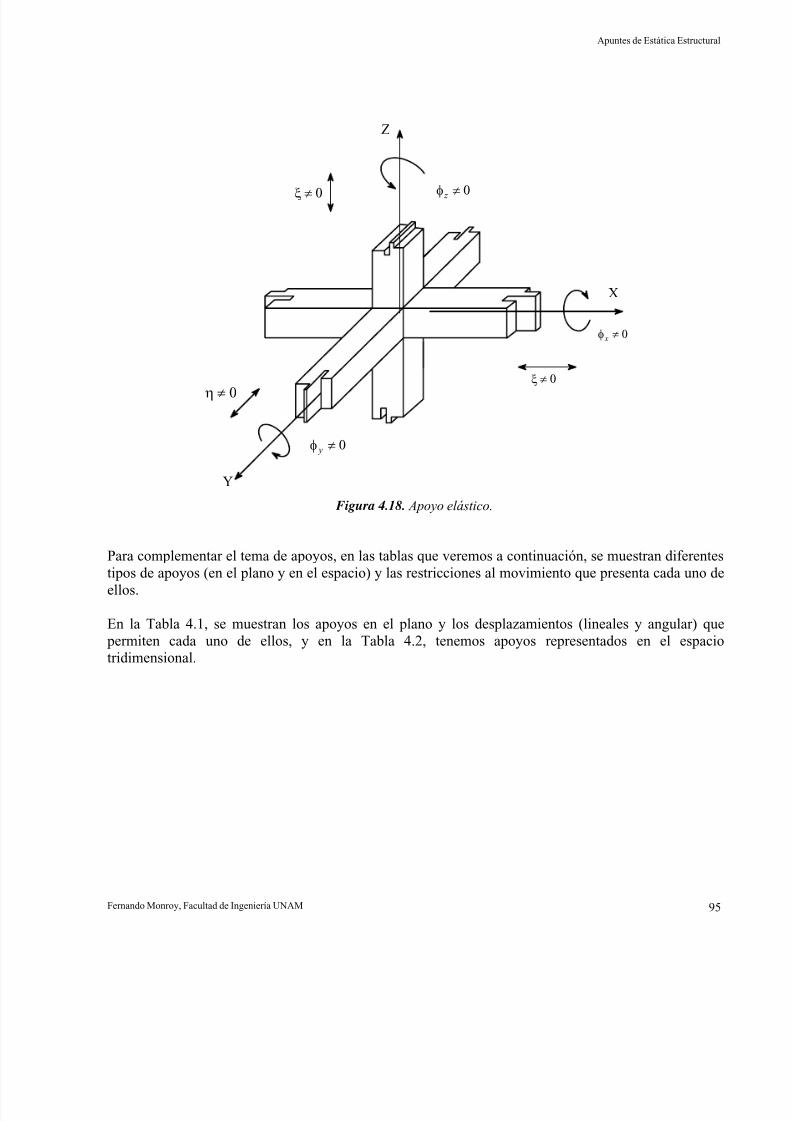
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 102/322
Apuntes de Estática Estructural
0≠φ z
Z
X
Y
0≠ξ
0≠ξ
0≠φ x
0≠φ y
0≠η
Figura 4.18. Apoyo elástico.
Para complementar el tema de apoyos, en las tablas que veremos a continuación, se muestran diferentestipos de apoyos (en el plano y en el espacio) y las restricciones al movimiento que presenta cada uno deellos.
En la Tabla 4.1, se muestran los apoyos en el plano y los desplazamientos (lineales y angular) que permiten cada uno de ellos, y en la Tabla 4.2, tenemos apoyos representados en el espaciotridimensional.
Fernando Monroy, Facultad de Ingeniería UNAM 95
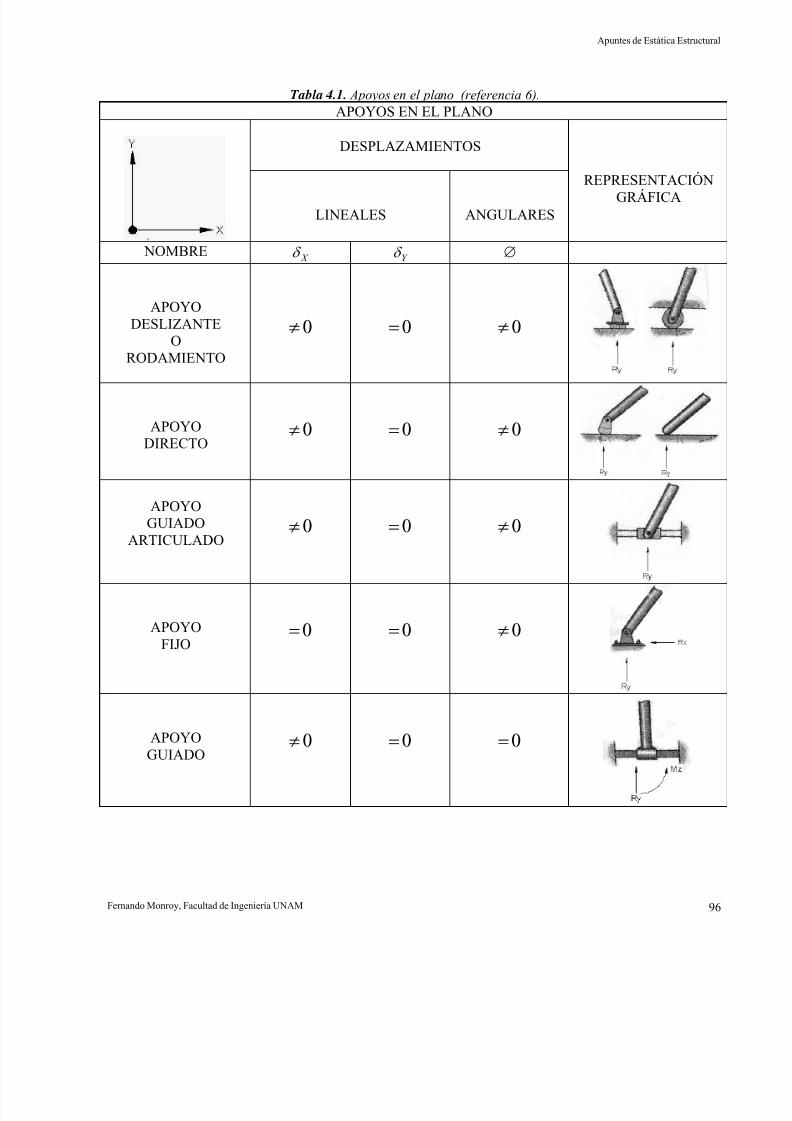
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 103/322
Apuntes de Estática Estructural
Tabla 4.1. Apoyos en el plano (referencia 6).APOYOS EN EL PLANO
DESPLAZAMIENTOS
LINEALES ANGULARESREPRESENTACIÓNGRÁFICA
NOMBRE X δ Y δ ∅
APOYODESLIZANTE
ORODAMIENTO
0≠ 0= 0≠
APOYODIRECTO
0≠ 0= 0≠
APOYOGUIADO
ARTICULADO0≠ 0= 0≠
APOYOFIJO
0= 0= 0≠
APOYO
GUIADO0≠ 0= 0=
Fernando Monroy, Facultad de Ingeniería UNAM 96

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 104/322
Apuntes de Estática Estructural
APOYOTIPO
EMPOTRAMIENTO0= 0= 0=
Tabla 4.2. Apoyos en el espacio (referencia 6)
Fernando Monroy, Facultad de Ingeniería UNAM 97
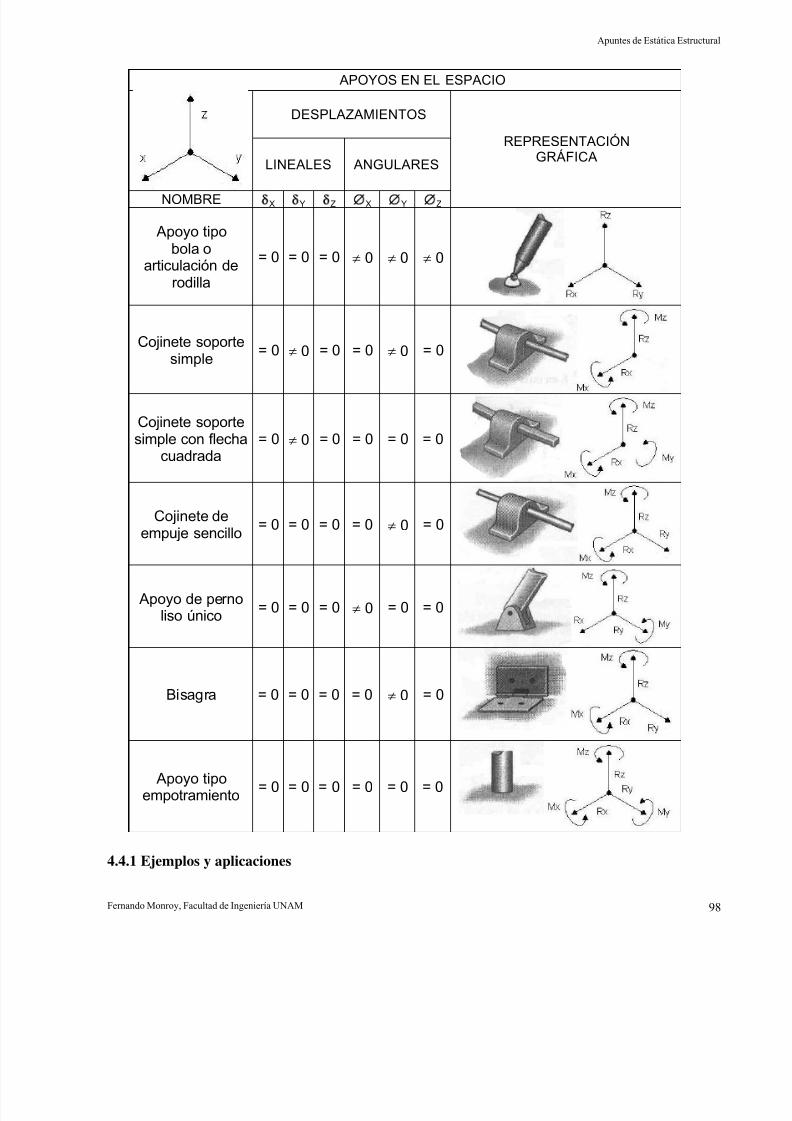
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 105/322
Apuntes de Estática Estructural
APOYOS EN EL ESPACIO
DESPLAZAMIENTOS
LINEALES ANGULARES
NOMBRE X Y Z ∅X ∅Y ∅Z
REPRESENTACIÓN
GRÁFICA
Apoyo tipobola o
articulación derodilla
= 0 = 0 = 0 ≠ 0 ≠ 0 ≠ 0
Cojinete soportesimple
= 0 ≠ 0 = 0 = 0 ≠ 0 = 0
Cojinete soportesimple con flecha
cuadrada= 0 ≠ 0 = 0 = 0 = 0 = 0
Cojinete deempuje sencillo
= 0 = 0 = 0 = 0 ≠ 0 = 0
Apoyo de pernoliso único
= 0 = 0 = 0 ≠ 0 = 0 = 0
Bisagra = 0 = 0 = 0 = 0 ≠ 0 = 0
Apoyo tipoempotramiento
= 0 = 0 = 0 = 0 = 0 = 0
4.4.1 Ejemplos y aplicaciones
Fernando Monroy, Facultad de Ingeniería UNAM 98
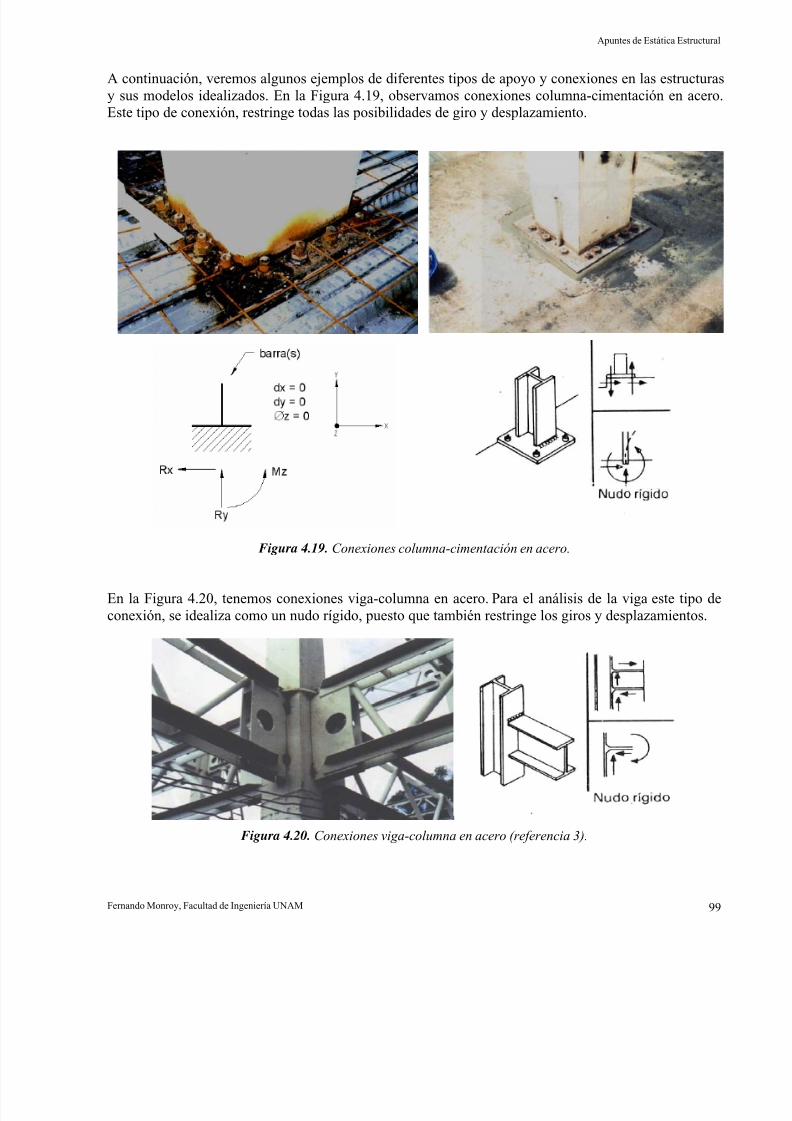
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 106/322
Apuntes de Estática Estructural
A continuación, veremos algunos ejemplos de diferentes tipos de apoyo y conexiones en las estructurasy sus modelos idealizados. En la Figura 4.19, observamos conexiones columna-cimentación en acero.Este tipo de conexión, restringe todas las posibilidades de giro y desplazamiento.
Fernando Monroy, Facultad de Ingeniería UNAM 99
Figura 4.19. Conexiones columna-cimentación en acero.
En la Figura 4.20, tenemos conexiones viga-columna en acero. Para el análisis de la viga este tipo deconexión, se idealiza como un nudo rígido, puesto que también restringe los giros y desplazamientos.
Figura 4.20. Conexiones viga-columna en acero (referencia 3).

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 107/322
Apuntes de Estática Estructural
También podemos tener conexiones viga-columna y columna-cimentación y ser idealizadas no comoempotramiento, sino como apoyos libres, en los cuales no existe restricción al giro, tal como se muestraen la Figura 4.21.
Figura 4.21. Conexiones viga-columna y columna-cimentación en acero (referencia 3).
Los apoyos en puentes vehiculares son otro ejemplo. En este tipo de apoyo, tenemos un apoyo directode la superficie de rodamiento sobre las columnas de apoyo, el cual podemos idealizar como un apoyodeslizante (Figura 4.22).
Figura 4.22. Apoyo en un puente vehicular.
Un ejemplo más sería una losa de concreto sobre muro de mampostería (Figura 4.23). Las cargasaplicadas a la losa, tienden a flexionarla, produciéndose un giro y flexión en los muros, pero lasholguras y la deformabilidad del mortero de las hiladas adyacentes producen rotaciones locales queliberan a los muros de las flexiones y hacen que la losa funcione como simplemente apoyada.
Fernando Monroy, Facultad de Ingeniería UNAM 100
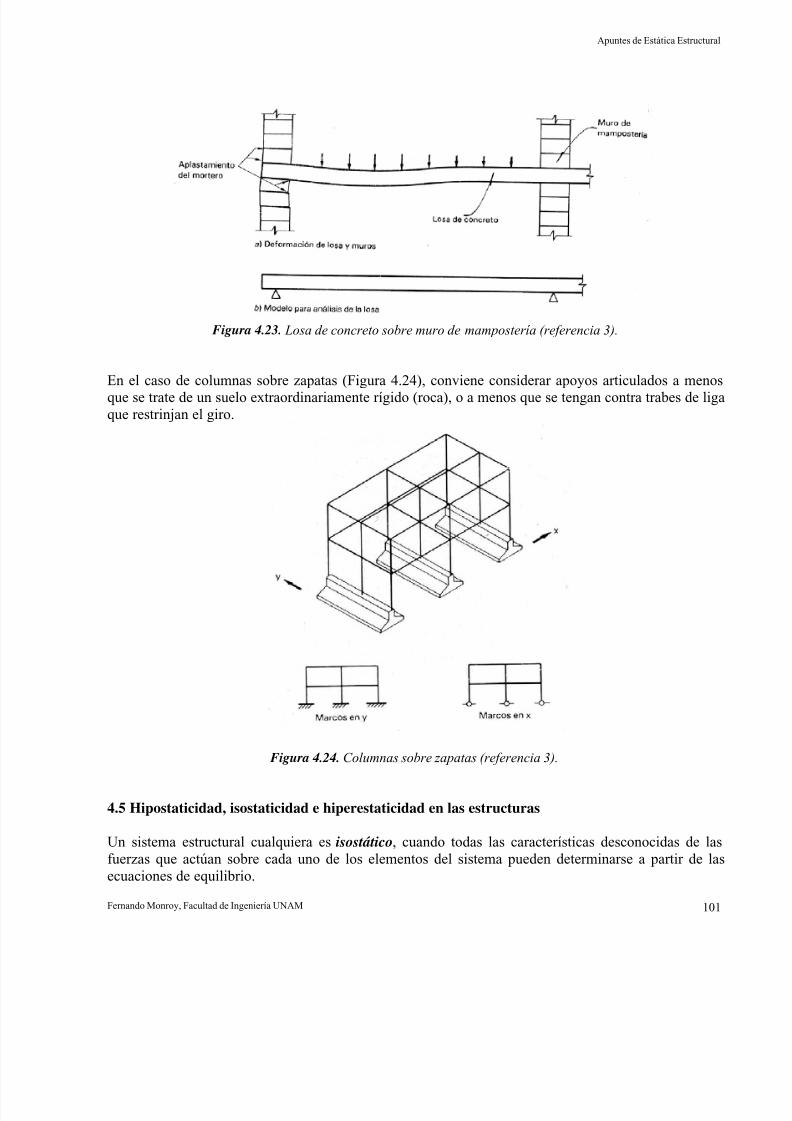
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 108/322
Apuntes de Estática Estructural
Figura 4.23. Losa de concreto sobre muro de mampostería (referencia 3).
En el caso de columnas sobre zapatas (Figura 4.24), conviene considerar apoyos articulados a menosque se trate de un suelo extraordinariamente rígido (roca), o a menos que se tengan contra trabes de ligaque restrinjan el giro.
Figura 4.24. Columnas sobre zapatas (referencia 3).
4.5 Hipostaticidad, isostaticidad e hiperestaticidad en las estructuras
Un sistema estructural cualquiera es isostático, cuando todas las características desconocidas de lasfuerzas que actúan sobre cada uno de los elementos del sistema pueden determinarse a partir de lasecuaciones de equilibrio.
Fernando Monroy, Facultad de Ingeniería UNAM 101
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 109/322
Apuntes de Estática Estructural
La isostaticidad de un sistema de elementos es una característica intrínseca a él como función del tipode uniones internas y externas asociadas a sus elementos, es decir, que es independiente de lascaracterísticas de la condición de carga a que se encuentre sometido el sistema.
Mediante el diagrama de cuerpo libre del sistema estructural, puede determinarse, por ejemplo, el
número total de incógnitas del sistema. Al número de incógnitas lo representamos comúnmente con laletra (I).
Las condiciones analíticas de equilibrio, aplicadas a cada elemento del sistema, permiten conocer elnúmero total de ecuaciones independientes que se pueden plantear para dicho sistema. Al número deecuaciones independientes lo representamos, digamos, con la letra (E).
Como resultado de comparar las dos cantidades mencionadas (I y E), se atribuye al sistema estructuralen estudio cualquiera de los calificativos siguientes:
1. Si el número de ecuaciones independientes es igual al número de incógnitas, y se tiene unsistema de ecuaciones compatible y determinado, la solución será única para las “n”incógnitas existentes.
Entonces, sí I = E el sistema es ISOSTÁTICO
2. Si el número de ecuaciones independientes es mayor que el número de incógnitas delsistema estructural, el sistema de ecuaciones planteado es incompatible y no tiene solucióndesde el punto de vista de la estática.
Por lo que, sí I < E el sistema es HIPOSTÁTICO
3. Si el número de ecuaciones independientes es menor que el número de incógnitas delsistema estructural, el sistema de ecuaciones planteado es compatible e indeterminado ytiene una infinidad de soluciones que cumplen con la estática.
Es decir, sí I > E el sistema es HIPERESTÁTICO
Puede presentarse el caso particular en el que el número de ecuaciones independientes es igual alnúmero de incógnitas del sistema estructural, pero el sistema de ecuaciones planteado no es compatibley determinado. Por lo tanto, no cumple con la definición de sistema isostático.
El caso antes mencionado, se presenta en aquellos sistemas estructurales formados por conjuntos deelementos, tales que, hacen que una porción del sistema tenga uniones excesivas, es decir, que sea
hiperestática y logran que otra se comporte como hipostática. Esta situación, aunque mantiene laigualdad entre el número de ecuaciones independientes y de incógnitas del sistema, no está asociada aun sistema de ecuaciones compatible determinado, ya que no se mantiene la estabilidad del sistemaestructural en estudio. Analicemos este caso a partir de la Figura 4.25.
Fernando Monroy, Facultad de Ingeniería UNAM 102

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 110/322
Apuntes de Estática Estructural
B
A
4
2
3
1
B
2
4
3
A
C
6
D
5
5
D
6
1 C
Figura 4.25. Sistema estructural en l que se muestran el número de incógnitas de cada elemento.
En la Figura 4.25, tenemos un sistema estructural y el número de incógnitas de cada uno de suselementos. Con base en lo anterior, podemos ver que la barra uno tiene seis incógnitas; las barras tres ycinco, tienen 5 incógnitas; las barras dos, cuatro y seis, tienen cuatro incógnitas, los nudos B y C,tienen tres incógnitas y los nudos A y D, tienen dos incógnitas (articulaciones).
Sabemos que a cada barra y nudo le podemos aplicar las tres ecuaciones de la estática, y a las unionesarticuladas sólo dos; de esta manera podremos determinar el número de ecuaciones independientes conlas que contamos una vez que ya sabemos el número de incógnitas que tenemos.
Para facilitar el análisis tomemos la siguiente notación:
bi = barra con “i” incógnitasn j = unión de “j” incógnitas B j = barra de “j” ecuaciones
Nuestro sistema estructural, tomando en cuenta la notación descrita, queda de la siguiente forma:
Fernando Monroy, Facultad de Ingeniería UNAM 103
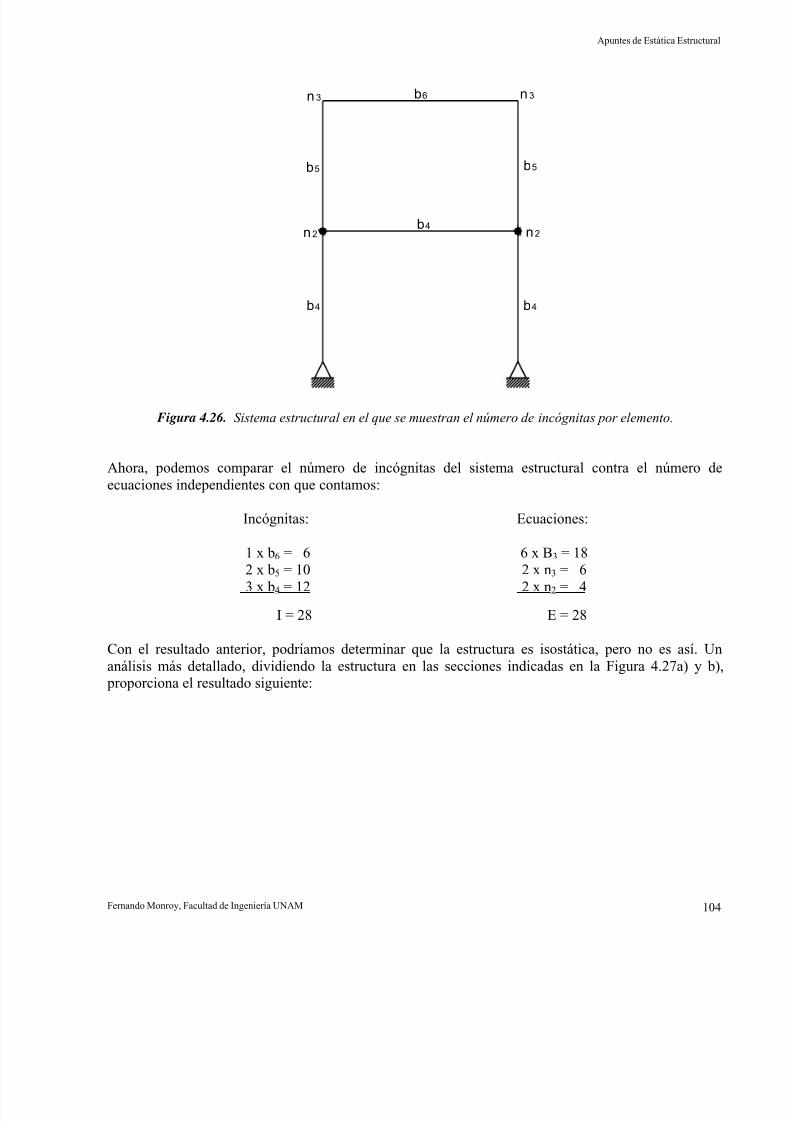
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 111/322
Apuntes de Estática Estructural
b6
n2
n 3
b4
b5
n2
n 3
b4
b5
b4
Figura 4.26. Sistema estructural en el que se muestran el número de incógnitas por elemento.
Ahora, podemos comparar el número de incógnitas del sistema estructural contra el número deecuaciones independientes con que contamos:
Incógnitas:
1 x b6 = 62 x b5 = 103 x b4 = 12
I = 28
Ecuaciones:
6 x B3 = 182 x n3 = 62 x n2 = 4
E = 28
Con el resultado anterior, podríamos determinar que la estructura es isostática, pero no es así. Unanálisis más detallado, dividiendo la estructura en las secciones indicadas en la Figura 4.27a) y b), proporciona el resultado siguiente:
Fernando Monroy, Facultad de Ingeniería UNAM 104
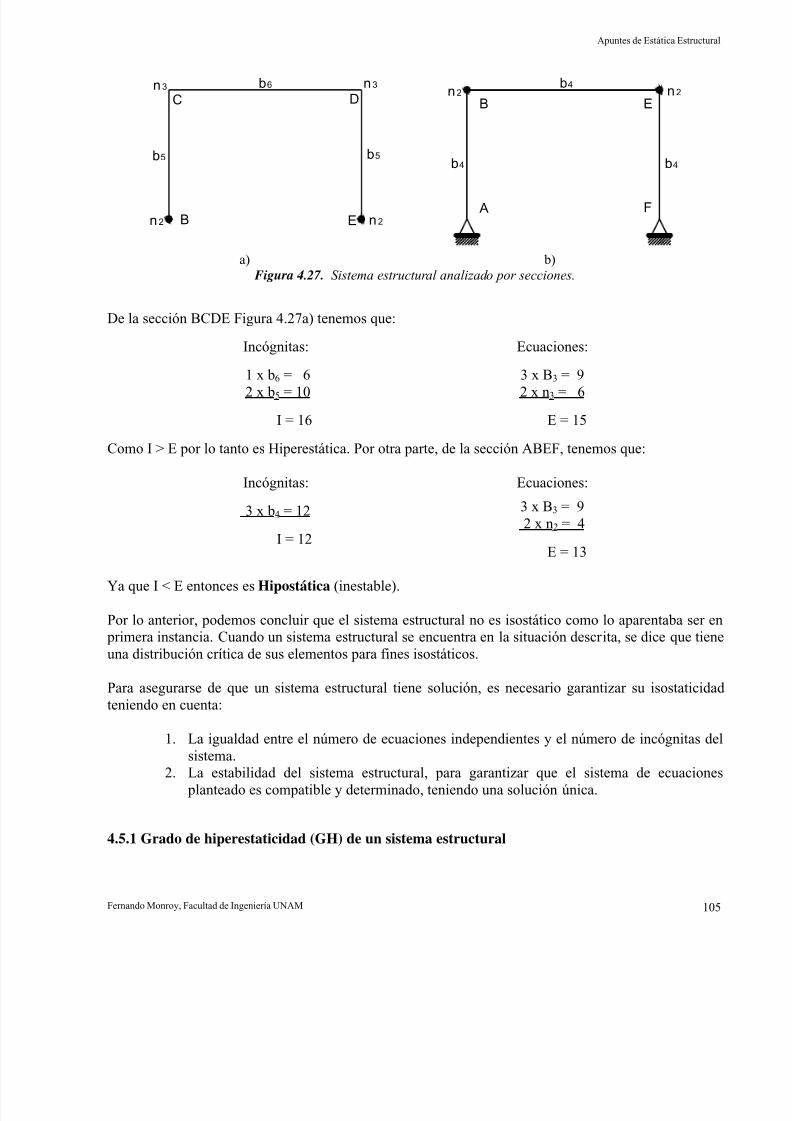
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 112/322
Apuntes de Estática Estructural
b6
n2
n3
b5
n2
n3
b5
n2
b4
n2
b4
b4
B
C D
E A
B E
F
a) b)
Figura 4.27. Sistema estructural analizado por secciones.
De la sección BCDE Figura 4.27a) tenemos que:
Incógnitas:
1 x b6 = 62 x b5 = 10
I = 16
Ecuaciones:
3 x B3 = 92 x n3 = 6
E = 15
Como I > E por lo tanto es Hiperestática. Por otra parte, de la sección ABEF, tenemos que:
Incógnitas:
3 x b4 = 12
I = 12
Ecuaciones:
3 x B3 = 92 x n2 = 4
E = 13
Ya que I < E entonces es Hipostática (inestable).
Por lo anterior, podemos concluir que el sistema estructural no es isostático como lo aparentaba ser en primera instancia. Cuando un sistema estructural se encuentra en la situación descrita, se dice que tieneuna distribución crítica de sus elementos para fines isostáticos.
Para asegurarse de que un sistema estructural tiene solución, es necesario garantizar su isostaticidadteniendo en cuenta:
1. La igualdad entre el número de ecuaciones independientes y el número de incógnitas del
sistema.2. La estabilidad del sistema estructural, para garantizar que el sistema de ecuaciones
planteado es compatible y determinado, teniendo una solución única.
4.5.1 Grado de hiperestaticidad (GH) de un sistema estructural
Fernando Monroy, Facultad de Ingeniería UNAM 105
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 113/322
Apuntes de Estática Estructural
Grado de hiperestaticidad de un sistema estructural, es la diferencia entre el número total de incógnitasdel sistema y el número total de ecuaciones independientes que pueden plantearse en función de lascondiciones analíticas de equilibrio.
GH = I – E
Donde siempre se cumple que I > E, por ser hiperestático el sistema.Para determinar el grado de hiperestaticidad se siguen los siguientes pasos:
1. Se obtienen los diagramas de cuerpo libre de todos los elementos que forman el sistema.
2. Se determina el número de incógnitas del sistema de fuerzas que actúan sobre cada elementoen particular, y se calcula el total de incógnitas del todo el sistema estructural: suma de lasincógnitas de cada elemento.
3. Se calcula el número de ecuaciones independientes que permita establecer la estática, según
el tipo de sistema de fuerzas que actúe sobre cada elemento, y se determina el total deecuaciones independientes del sistema estructural: suma de las ecuaciones independientes decada elemento.
4. Si el número de incógnitas es mayor que el número de ecuaciones independientes delsistema, se calcula el valor de GH, de acuerdo con la expresión GH = I – E; donde I > E.
4.5.2 Determinación de los grados de libertad (GL) de un sistema estructural hipostático
Grado de libertad de un sistema estructural hipostático, es la diferencia entre el total de ecuacionesindependientes que pueden plantearse en función de las condiciones analíticas de equilibrio y el total deincógnitas del sistema y representa el número de elementos de unión que es necesario adicionarle alsistema para que sea isostático.
GL = E – I donde siempre se cumple que I < E por ser hipostático el sistema considerado.
Para determinar el grado de libertad de un sistema estructural, se siguen los tres primeros pasos para ladeterminación del grado de hiperestaticidad. El cuarto se sustituye por el enunciado siguiente:
Si el número de ecuaciones independientes es mayor que el número de incógnitas, se calcula el valor deGL, de acuerdo con la expresión GL = E – I; donde I < E.
Hemos visto que dependiendo del número de incógnitas y ecuaciones independientes que tengamos ennuestro sistema estructural, tendremos una estructura isostática, hiperestática o hipostática, y tambiénque, si es hiperestática podremos calcular el grado de hiperestaticidad y que si es hipostática podremoscalcular el grado de libertad. Lo anterior, a manera de resumen, lo podemos esquematizar en elsiguiente diagrama de flujo (Figura 4.28):
Fernando Monroy, Facultad de Ingeniería UNAM 106
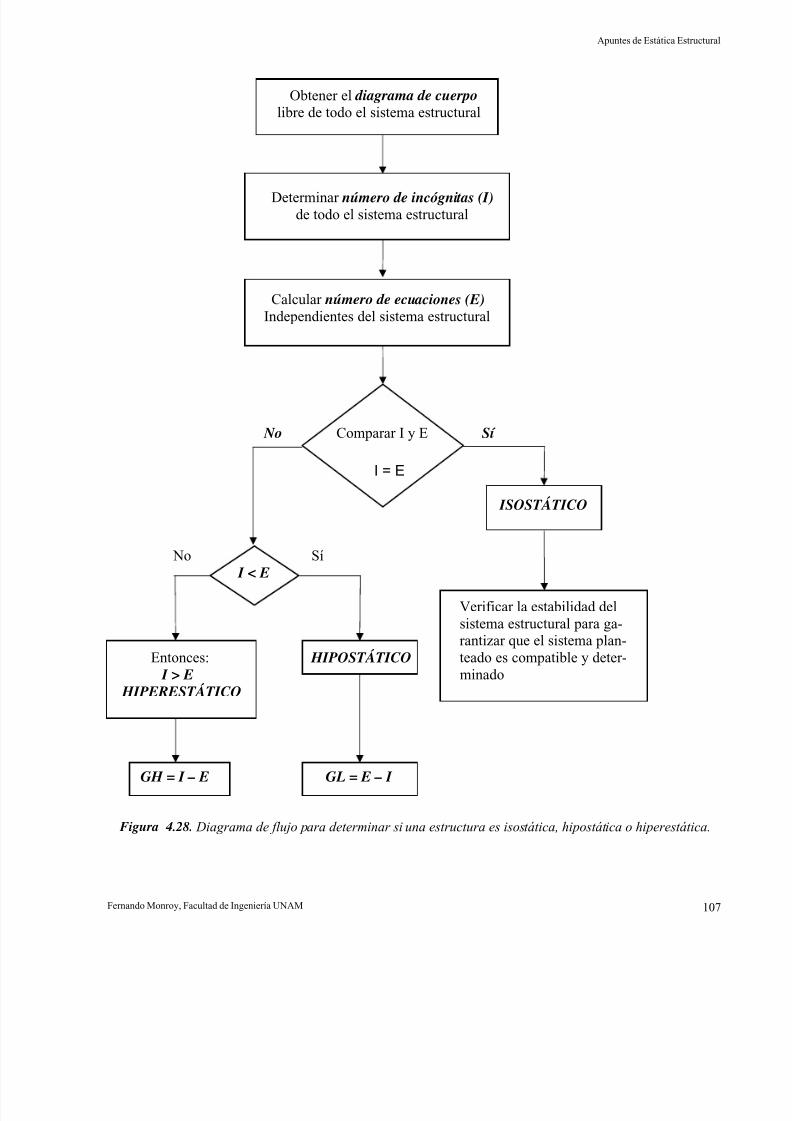
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 114/322
Apuntes de Estática Estructural
Obtener el diagrama de cuerpo libre de todo el sistema estructural
Determinar número de incógnitas (I) de todo el sistema estructural
Calcular número de ecuaciones (E) Independientes del sistema estructural
No Comparar I y E Sí
I = E
ISOSTÁTICO
No Sí I < E
Fernando Monroy, Facultad de Ingeniería UNAM 107
Verificar la estabilidad delsistema estructural para ga-rantizar que el sistema plan-
Entonces: HIPOSTÁTICO teado es compatible y deter- I > E minado
HIPERESTÁTICO
GH = I – E GL = E – I
Figura 4.28. Diagrama de flujo para determinar si una estructura es isostática, hipostática o hiperestática.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 115/322
Apuntes de Estática Estructural
A continuación se presentan algunos ejemplos que ilustran la obtención de la isostaticidad de unaestructura.
Ejemplo 4.1. Obtener la isostaticidad de la estructura que se muestra en la Figura 4.29.
n3
b5
b6
A
B
n 3
b4
C
D
Figura 4.29. Estructura del ejemplo 4.1.
Incógnitas:
1 x b6 = 61 x b5 = 51 x b4 = 4
I = 15
Ecuaciones:
3 x B3 = 92 x n3 = 6
E = 15
I = E ∴ ISOSTÁTICA
Ejemplo 4.2. Obtener la isostaticidad de la estructura que se muestra en la Figura 4.30.
B A
b6
Figura 4.30. Estructura del ejemplo 4.2.
Incógnitas:
1 x b6 = 6
I = 6
Ecuaciones:
1 x B3 = 3
E = 3
I > E ∴HIPERESTÁTICAGH = I – E
GH = 6 – 3 = 3
Fernando Monroy, Facultad de Ingeniería UNAM 108
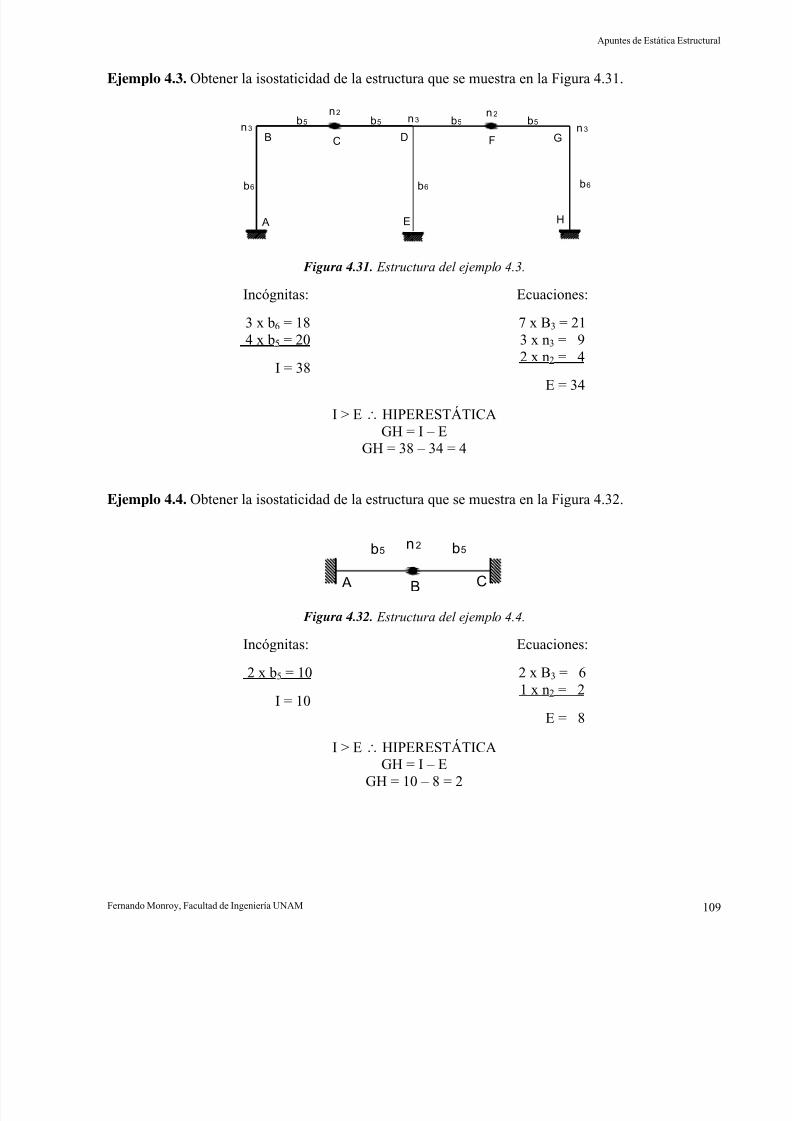
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 116/322
Apuntes de Estática Estructural
Ejemplo 4.3. Obtener la isostaticidad de la estructura que se muestra en la Figura 4.31.
n3
b6
D
E A
B
n3
b6
C F G
H
n3
n2 n2
b6
b5 b5 b5 b5
Figura 4.31. Estructura del ejemplo 4.3.
Incógnitas:
3 x b6 = 184 x b5 = 20
I = 38
Ecuaciones:
7 x B3 = 213 x n3 = 92 x n2 = 4
E = 34
I > E ∴ HIPERESTÁTICAGH = I – E
GH = 38 – 34 = 4
Ejemplo 4.4. Obtener la isostaticidad de la estructura que se muestra en la Figura 4.32.
CB A
b5n2 b5
Figura 4.32. Estructura del ejemplo 4.4.
Incógnitas:
2 x b5 = 10
I = 10
Ecuaciones:
2 x B3 = 61 x n2 = 2
E = 8
I > E ∴ HIPERESTÁTICAGH = I – EGH = 10 – 8 = 2
Fernando Monroy, Facultad de Ingeniería UNAM 109
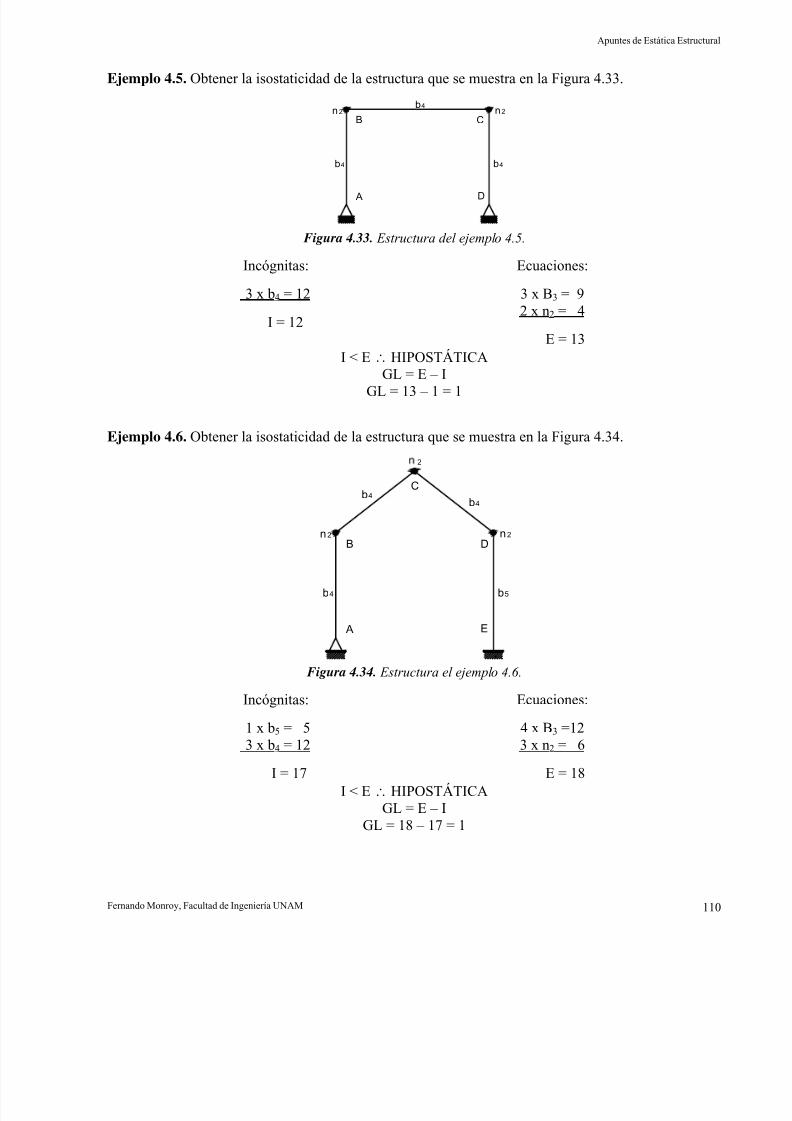
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 117/322
Apuntes de Estática Estructural
Ejemplo 4.5. Obtener la isostaticidad de la estructura que se muestra en la Figura 4.33.
b4
b4n2n2
b4
B
A
C
D
Figura 4.33. Estructura del ejemplo 4.5.
Incógnitas:
3 x b4 = 12
I = 12
Ecuaciones:
3 x B3 = 92 x n2 = 4
E = 13I < E ∴ HIPOSTÁTICA
GL = E – IGL = 13 – 1 = 1
Ejemplo 4.6. Obtener la isostaticidad de la estructura que se muestra en la Figura 4.34.
b4
n2n2
b5
B
A E
D
C
2
b4b4
Figura 4.34. Estructura el ejemplo 4.6.
Incógnitas:
1 x b5 = 5
3 x b4 = 12I = 17
Ecuaciones:
4 x B3 =12
3 x n2 = 6E = 18
I < E ∴ HIPOSTÁTICAGL = E – I
GL = 18 – 17 = 1
Fernando Monroy, Facultad de Ingeniería UNAM 110
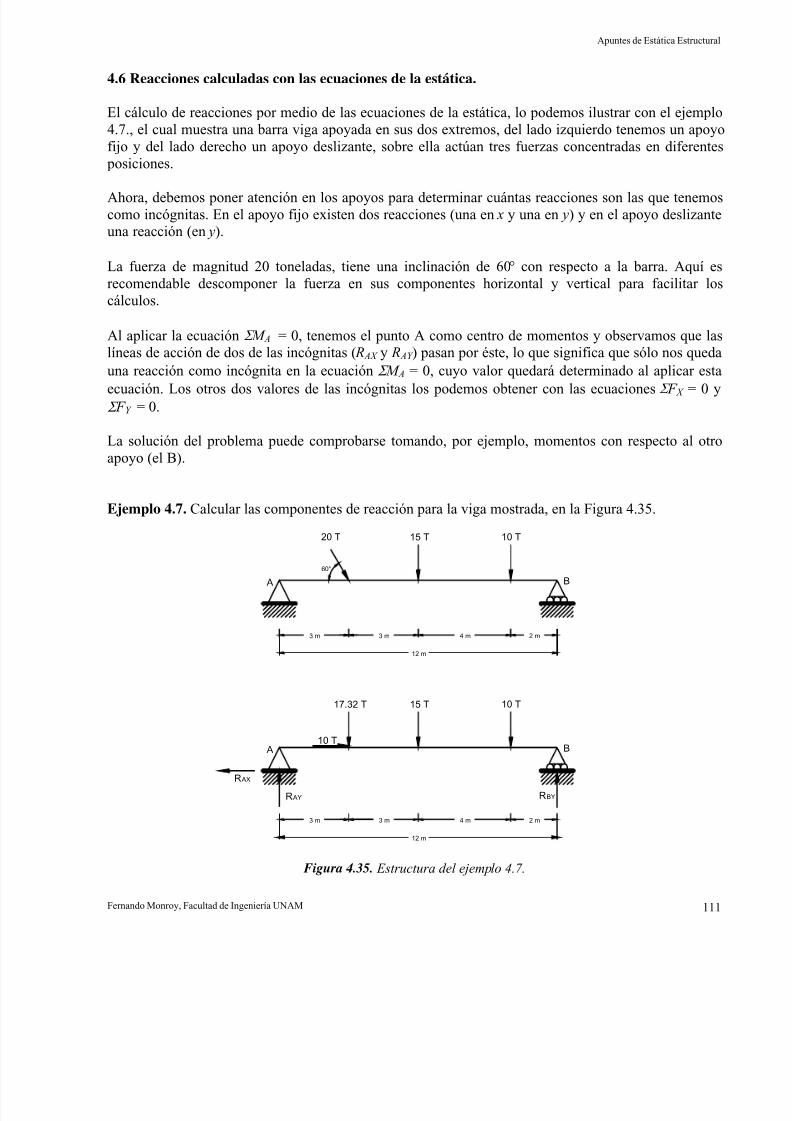
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 118/322
Apuntes de Estática Estructural
4.6 Reacciones calculadas con las ecuaciones de la estática.
El cálculo de reacciones por medio de las ecuaciones de la estática, lo podemos ilustrar con el ejemplo4.7., el cual muestra una barra viga apoyada en sus dos extremos, del lado izquierdo tenemos un apoyofijo y del lado derecho un apoyo deslizante, sobre ella actúan tres fuerzas concentradas en diferentes posiciones.
Ahora, debemos poner atención en los apoyos para determinar cuántas reacciones son las que tenemoscomo incógnitas. En el apoyo fijo existen dos reacciones (una en x y una en y) y en el apoyo deslizanteuna reacción (en y).
La fuerza de magnitud 20 toneladas, tiene una inclinación de 60° con respecto a la barra. Aquí esrecomendable descomponer la fuerza en sus componentes horizontal y vertical para facilitar loscálculos.
Al aplicar la ecuación Σ M A = 0, tenemos el punto A como centro de momentos y observamos que laslíneas de acción de dos de las incógnitas ( R AX y R AY ) pasan por éste, lo que significa que sólo nos queda
una reacción como incógnita en la ecuación Σ M A = 0, cuyo valor quedará determinado al aplicar estaecuación. Los otros dos valores de las incógnitas los podemos obtener con las ecuaciones Σ F X = 0 yΣ F Y = 0.
La solución del problema puede comprobarse tomando, por ejemplo, momentos con respecto al otroapoyo (el B).
Ejemplo 4.7. Calcular las componentes de reacción para la viga mostrada, en la Figura 4.35.
20 T 15 T 10 T
B A
12 m
3 m 2 m4 m3 m
60°
17.32 T
3 m
A
12 m
2 m4 m3 m
B
10 T15 T
10 T
R AY RBY
R AX
Figura 4.35. Estructura del ejemplo 4.7.
Fernando Monroy, Facultad de Ingeniería UNAM 111
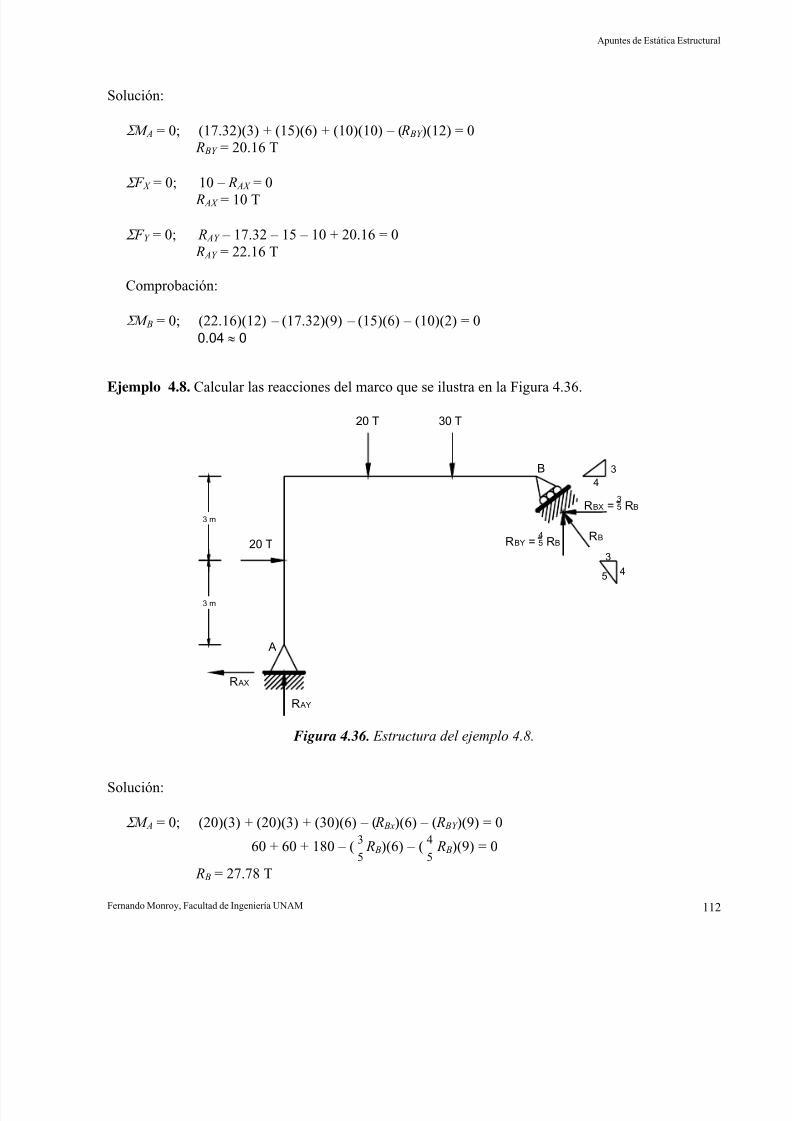
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 119/322
Apuntes de Estática Estructural
Solución:
Σ M A = 0; (17.32)(3) + (15)(6) + (10)(10) – ( R BY )(12) = 0 R BY = 20.16 T
Σ F X = 0; 10 – R AX = 0 R AX = 10 T
Σ F Y = 0; R AY – 17.32 – 15 – 10 + 20.16 = 0 R AY = 22.16 T
Comprobación:
Σ M B = 0; (22.16)(12) – (17.32)(9) – (15)(6) – (10)(2) = 0B
0.04 ≈ 0
Ejemplo 4.8. Calcular las reacciones del marco que se ilustra en la Figura 4.36.
R AX
R AY
A
RBY =45 RB
B4
3
4
3
5
RBX =35 RB
RB
20 T 30 T
20 T
3 m
3 m
Figura 4.36. Estructura del ejemplo 4.8.
Solución:
Σ M A = 0; (20)(3) + (20)(3) + (30)(6) – ( R Bx)(6) – ( R BY )(9) = 0
60 + 60 + 180 – (5
3 R B)(6) – (B
5
4 R BB)(9) = 0
R B = 27.78 TB
Fernando Monroy, Facultad de Ingeniería UNAM 112
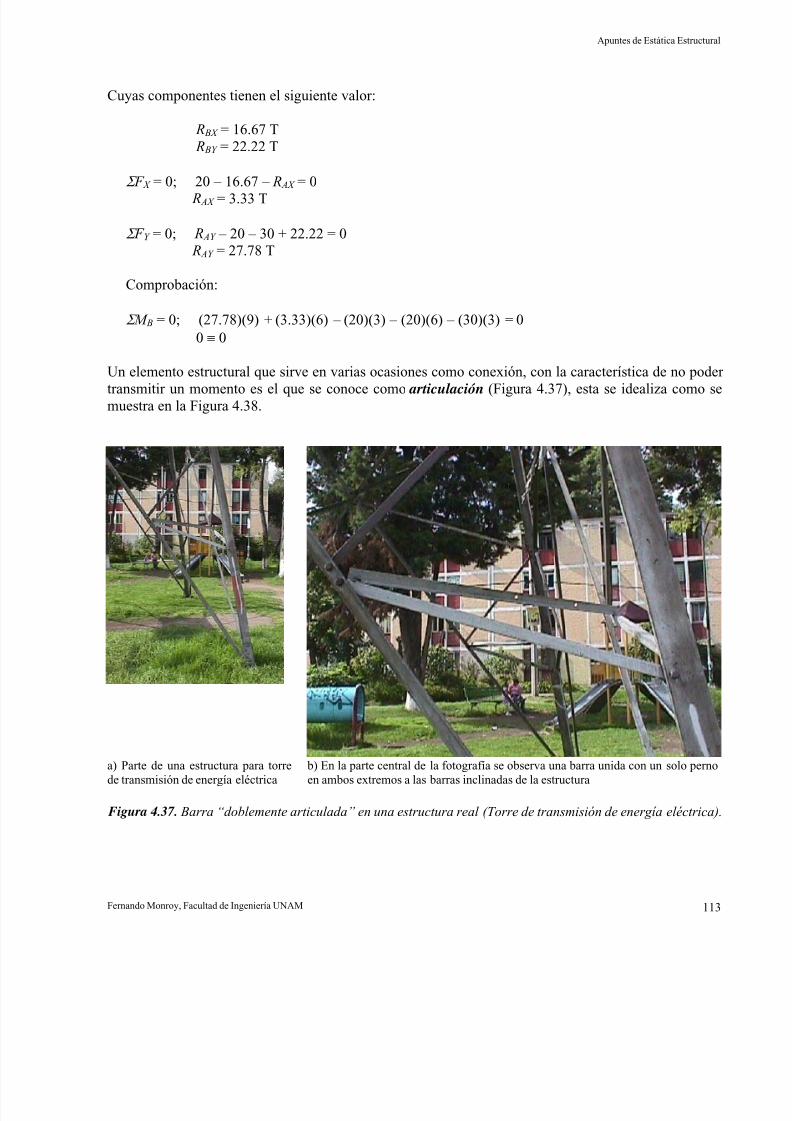
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 120/322
Apuntes de Estática Estructural
Cuyas componentes tienen el siguiente valor:
R BX = 16.67 T R BY = 22.22 T
Σ F X = 0; 20 – 16.67 – R AX = 0 R AX = 3.33 T
Σ F Y = 0; R AY – 20 – 30 + 22.22 = 0 R AY = 27.78 T
Comprobación:
Σ M B = 0; (27.78)(9) + (3.33)(6) – (20)(3) – (20)(6) – (30)(3) = 0B
0 ≡ 0
Un elemento estructural que sirve en varias ocasiones como conexión, con la característica de no podertransmitir un momento es el que se conoce como articulación (Figura 4.37), esta se idealiza como semuestra en la Figura 4.38.
a) Parte de una estructura para torrede transmisión de energía eléctrica
b) En la parte central de la fotografía se observa una barra unida con un solo pernoen ambos extremos a las barras inclinadas de la estructura
Figura 4.37. Barra “doblemente articulada” en una estructura real (Torre de transmisión de energía eléctrica).
Fernando Monroy, Facultad de Ingeniería UNAM 113
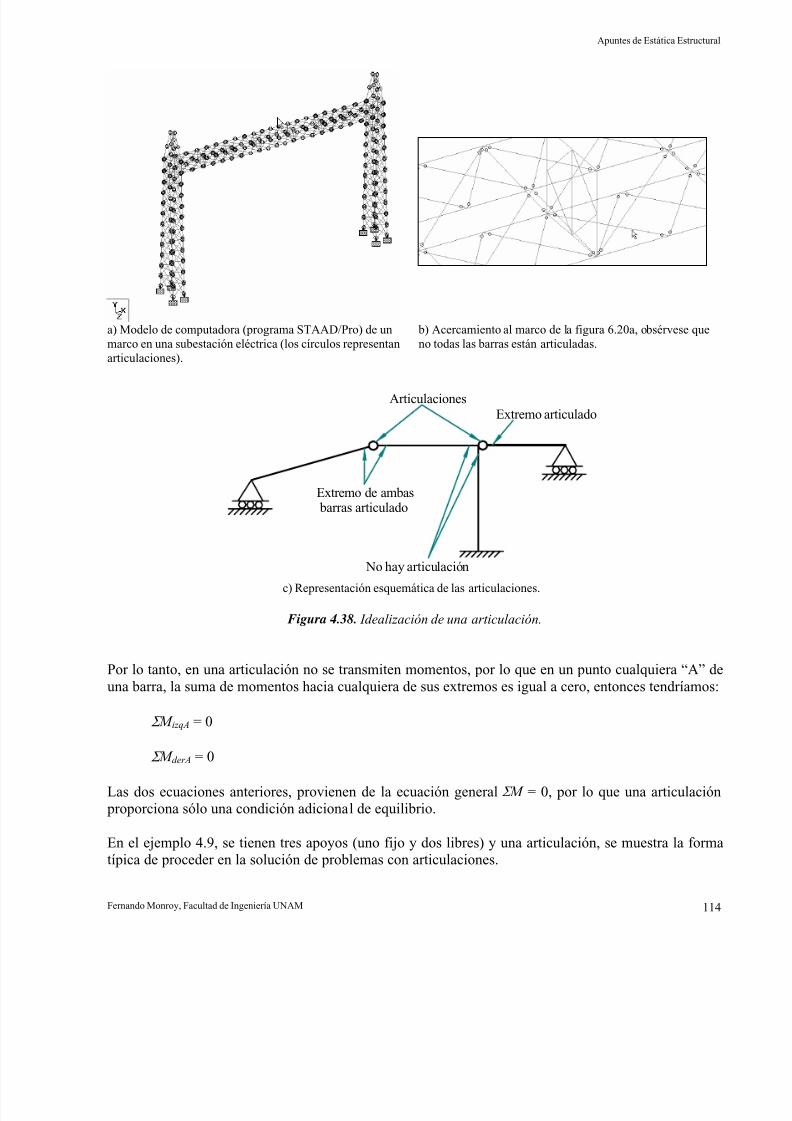
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 121/322
Apuntes de Estática Estructural
a) Modelo de computadora (programa STAAD/Pro) de unmarco en una subestación eléctrica (los círculos representanarticulaciones).
b) Acercamiento al marco de la figura 6.20a, obsérvese queno todas las barras están articuladas.
Extremo articulado
Extremo de ambas barras articulado
No hay articulación
Articulaciones
c) Representación esquemática de las articulaciones.
Figura 4.38. Idealización de una articulación.
Por lo tanto, en una articulación no se transmiten momentos, por lo que en un punto cualquiera “A” deuna barra, la suma de momentos hacia cualquiera de sus extremos es igual a cero, entonces tendríamos:
Σ M izqA = 0
Σ M derA = 0
Las dos ecuaciones anteriores, provienen de la ecuación general Σ M = 0, por lo que una articulación proporciona sólo una condición adicional de equilibrio.
En el ejemplo 4.9, se tienen tres apoyos (uno fijo y dos libres) y una articulación, se muestra la formatípica de proceder en la solución de problemas con articulaciones.
Fernando Monroy, Facultad de Ingeniería UNAM 114
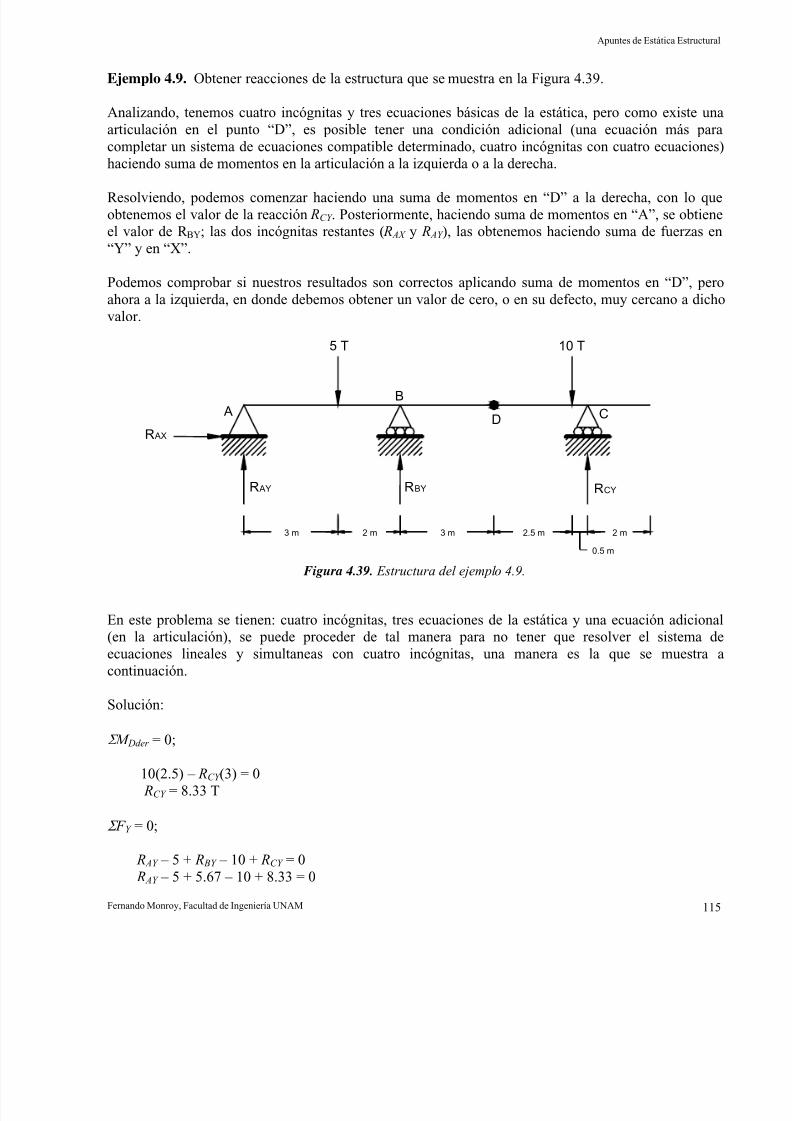
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 122/322
Apuntes de Estática Estructural
Ejemplo 4.9. Obtener reacciones de la estructura que se muestra en la Figura 4.39.
Analizando, tenemos cuatro incógnitas y tres ecuaciones básicas de la estática, pero como existe unaarticulación en el punto “D”, es posible tener una condición adicional (una ecuación más paracompletar un sistema de ecuaciones compatible determinado, cuatro incógnitas con cuatro ecuaciones)haciendo suma de momentos en la articulación a la izquierda o a la derecha.
Resolviendo, podemos comenzar haciendo una suma de momentos en “D” a la derecha, con lo queobtenemos el valor de la reacción RCY . Posteriormente, haciendo suma de momentos en “A”, se obtieneel valor de R BY; las dos incógnitas restantes ( R AX y R AY ), las obtenemos haciendo suma de fuerzas en“Y” y en “X”.
Podemos comprobar si nuestros resultados son correctos aplicando suma de momentos en “D”, peroahora a la izquierda, en donde debemos obtener un valor de cero, o en su defecto, muy cercano a dichovalor.
5 T 10 T
AB
D C
R AY
R AX
RBY RCY
3 m 2 m 3 m 2.5 m
0.5 m
2 m
Figura 4.39. Estructura del ejemplo 4.9.
En este problema se tienen: cuatro incógnitas, tres ecuaciones de la estática y una ecuación adicional(en la articulación), se puede proceder de tal manera para no tener que resolver el sistema deecuaciones lineales y simultaneas con cuatro incógnitas, una manera es la que se muestra acontinuación.
Solución:
Σ M Dder = 0;
10(2.5) – RCY (3) = 0 RCY = 8.33 T
Σ F Y = 0;
R AY – 5 + R BY – 10 + RCY = 0 R AY – 5 + 5.67 – 10 + 8.33 = 0
Fernando Monroy, Facultad de Ingeniería UNAM 115
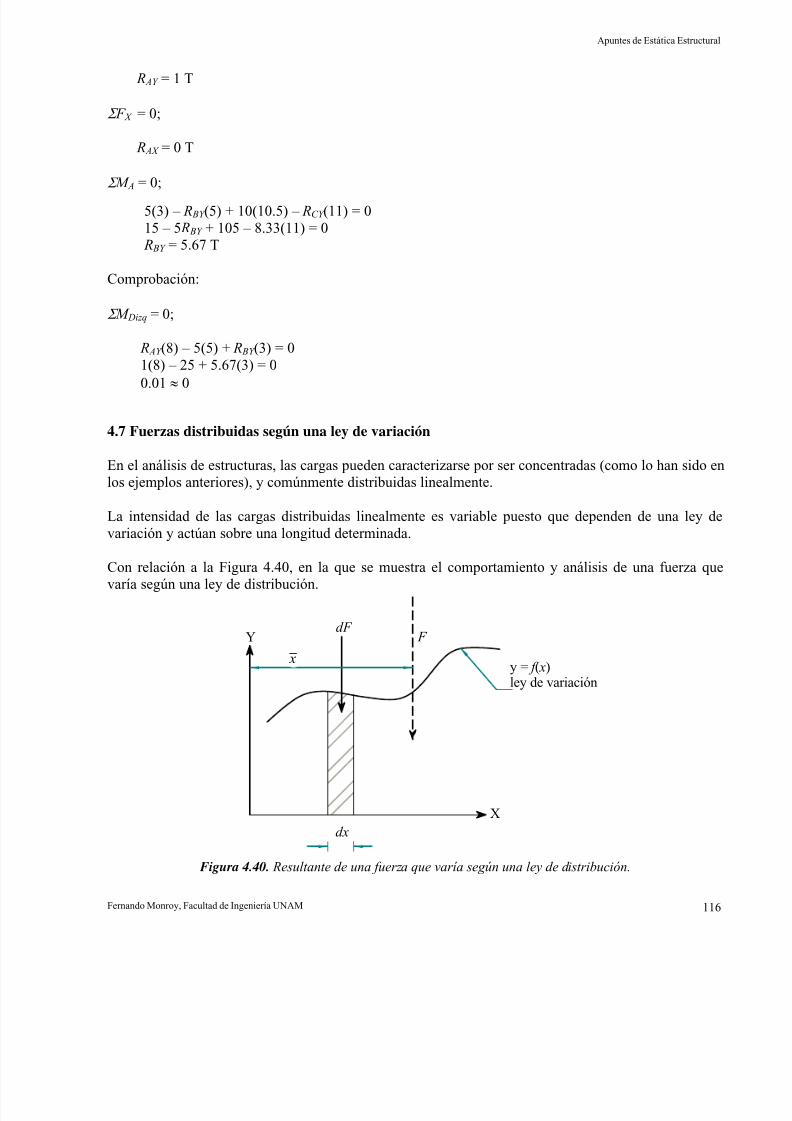
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 123/322
Apuntes de Estática Estructural
R AY = 1 T
Σ F X = 0;
R AX = 0 T
Σ M A = 0;5(3) – R BY (5) + 10(10.5) – RCY (11) = 015 – 5 R BY + 105 – 8.33(11) = 0 R BY = 5.67 T
Comprobación:
Σ M Dizq = 0;
R AY (8) – 5(5) + R BY (3) = 01(8) – 25 + 5.67(3) = 00.01 ≈ 0
4.7 Fuerzas distribuidas según una ley de variación
En el análisis de estructuras, las cargas pueden caracterizarse por ser concentradas (como lo han sido enlos ejemplos anteriores), y comúnmente distribuidas linealmente.
La intensidad de las cargas distribuidas linealmente es variable puesto que dependen de una ley devariación y actúan sobre una longitud determinada.
Con relación a la Figura 4.40, en la que se muestra el comportamiento y análisis de una fuerza quevaría según una ley de distribución.
Fernando Monroy, Facultad de Ingeniería UNAM 116
Y
X
63
dF F
0dx
xy = f ( x)ley de variación
Figura 4.40. Resultante de una fuerza que varía según una ley de distribución.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 124/322
Apuntes de Estática Estructural
Ahora, lo que nos interesa es encontrar el valor de la resultante R y de su posición x .
dF = y(x)dx = d Área
∫ ∫== y(x)dxdF R
R = Área bajo la curva de distribución de la fuerza f ( x)
Si calculamos el momento de R, por ejemplo, con respecto al eje y, tenemos:
= x R Σ Momentos de las componentes
∫ ∫== xy(x)dx xdF x R
= x R Momento estático del área bajo la curva = Q
centroidedel posición== RQ x
En la Figura 4.41, se muestra el caso más sencillo que es el de la carga uniforme. Primeramente seanaliza con integración y después podemos observar que se puede hacer un análisis más sencillo,donde la carga uniforme tiene la forma de un rectángulo, y sabemos que la fuerza resultante R es igualal área bajo la curva. El área de un rectángulo está dado por el producto de la base por la altura,entonces tendríamos que R = wL. Sólo falta analizar el signo o sentido de la carga, y como la carga estáen sentido contrario al sentido del eje y, finalmente tenemos que R = – wL. Ahora, la fuerza resultante R se extiende a través del centro geométrico o centroide de ésta área rectangular, de tal forma que x = L/2.
Pasando al caso de una carga triangular, se puede hacer un análisis similar al de la carga uniforme. Enla Figura 4.42, se muestra el valor de la resultante y de la posición del centroide obtenidos medianteintegración y mediante un análisis geométrico, en el que el área bajo la curva se obtiene mediante elárea de un triángulo (A = ½ bh) y la posición del centroide o centro geométrico está a 2/3 de distanciasobre el eje horizontal con respecto al origen, que representa el inicio de la carga o donde su valor escero.
Fernando Monroy, Facultad de Ingeniería UNAM 117
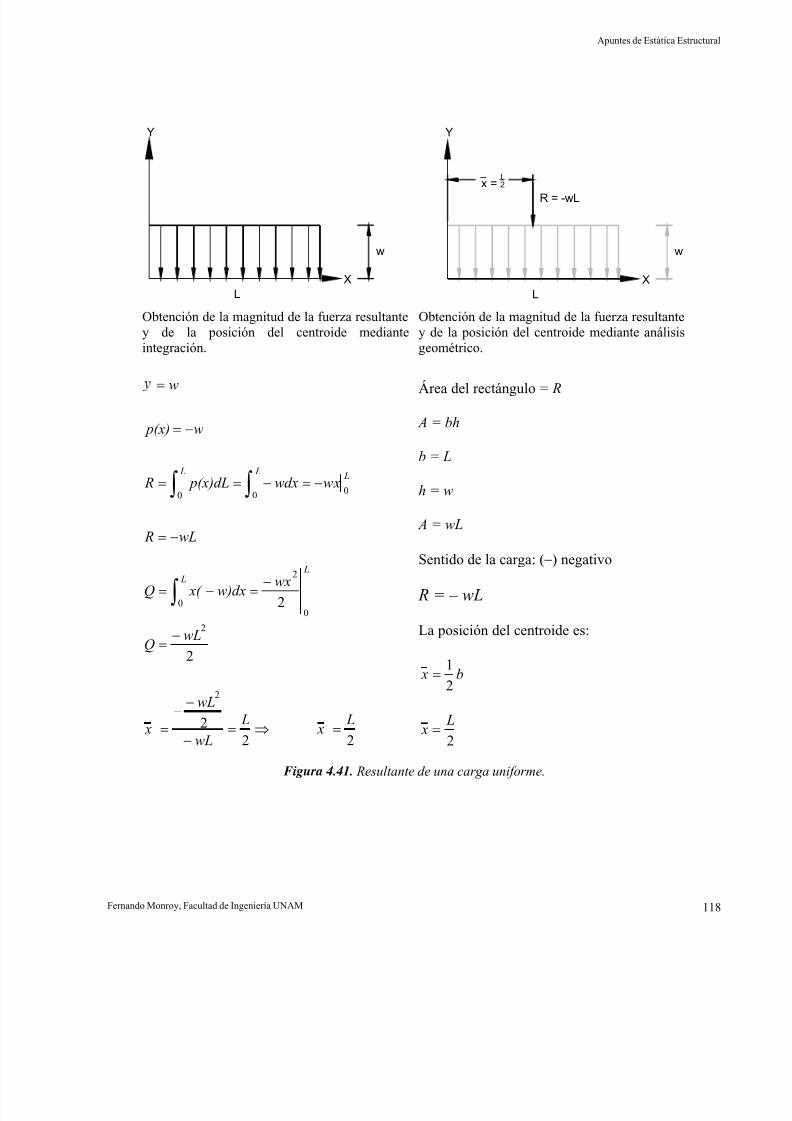
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 125/322
Apuntes de Estática Estructural
X
Y
L
w w
L
Y
X
x =
L
2R = -wL
Obtención de la magnitud de la fuerza resultantey de la posición del centroide medianteintegración.
wL R
xwwdx p(x)dL R
w p(x)
w
L L L
−=
−=−==
−=
=
∫ ∫0 0 0
222
2
2
2
2
00
2
L x
L
wL
wL
x
wLQ
wxw)dx x( Q
L L
=⇒=−
−−
=
−=
−=−= ∫
Obtención de la magnitud de la fuerza resultantey de la posición del centroide mediante análisisgeométrico.
Área del rectángulo = R
A = bh
b = L
h = w
A = wL
Sentido de la carga: (−) negativo
R = – wL
La posición del centroide es:
b x2
1=
2
L x =
Figura 4.41. Resultante de una carga uniforme.
Fernando Monroy, Facultad de Ingeniería UNAM 118
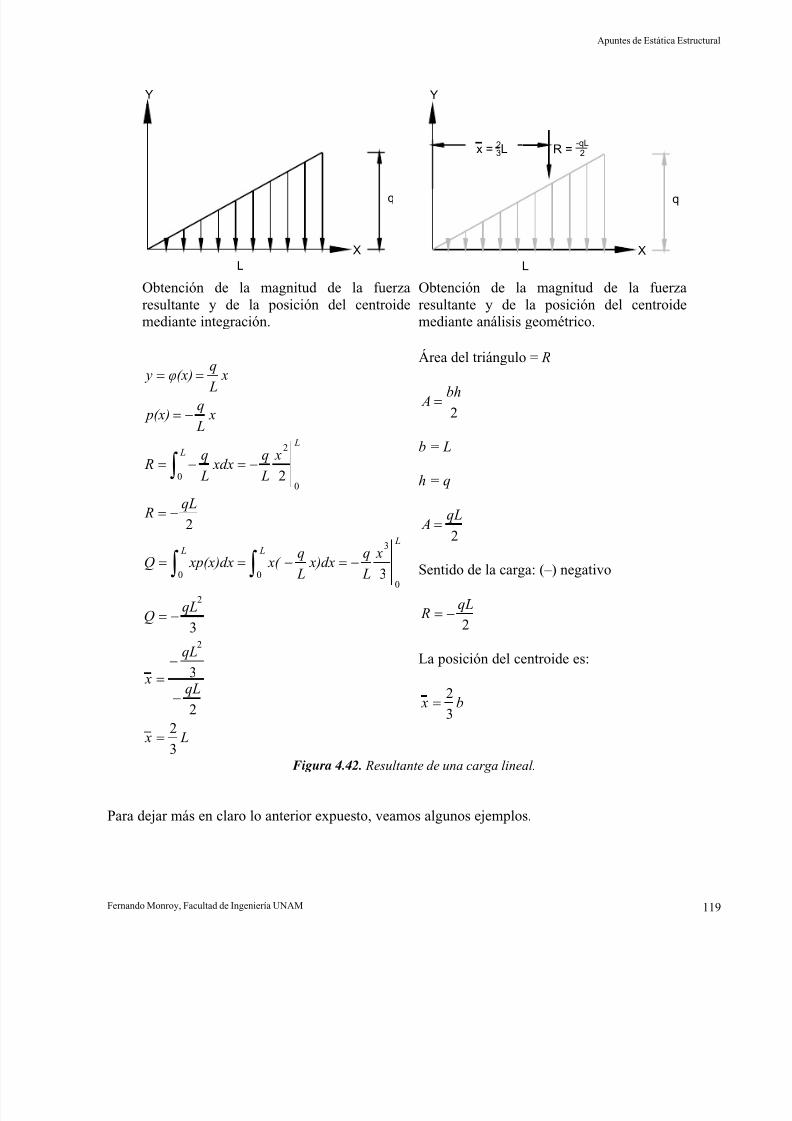
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 126/322
Apuntes de Estática Estructural
Y
L
q
L
Y
X X
q
x = 23L R =
-qL2
Obtención de la magnitud de la fuerzaresultante y de la posición del centroidemediante integración.
L x
qL
qL
x
qLQ
x
L
q x)dx L
q x( xp(x)dxQ
qL R
x
L
q xdx
L
q R
x L
q p(x)
x L
qφ(x) y
L L L
L L
3
22
3
3
3
2
2
2
2
0 00
3
00
2
=
−
−=
−=
−=−==
−=
−=−=
−=
==
∫ ∫
∫
Obtención de la magnitud de la fuerzaresultante y de la posición del centroidemediante análisis geométrico.
Área del triángulo = R
2
bh A =
b = L
h = q
2
qL A =
Sentido de la carga: (–) negativo
2
qL R −=
La posición del centroide es:
b x3
2=
Figura 4.42. Resultante de una carga lineal.
Para dejar más en claro lo anterior expuesto, veamos algunos ejemplos.
Fernando Monroy, Facultad de Ingeniería UNAM 119
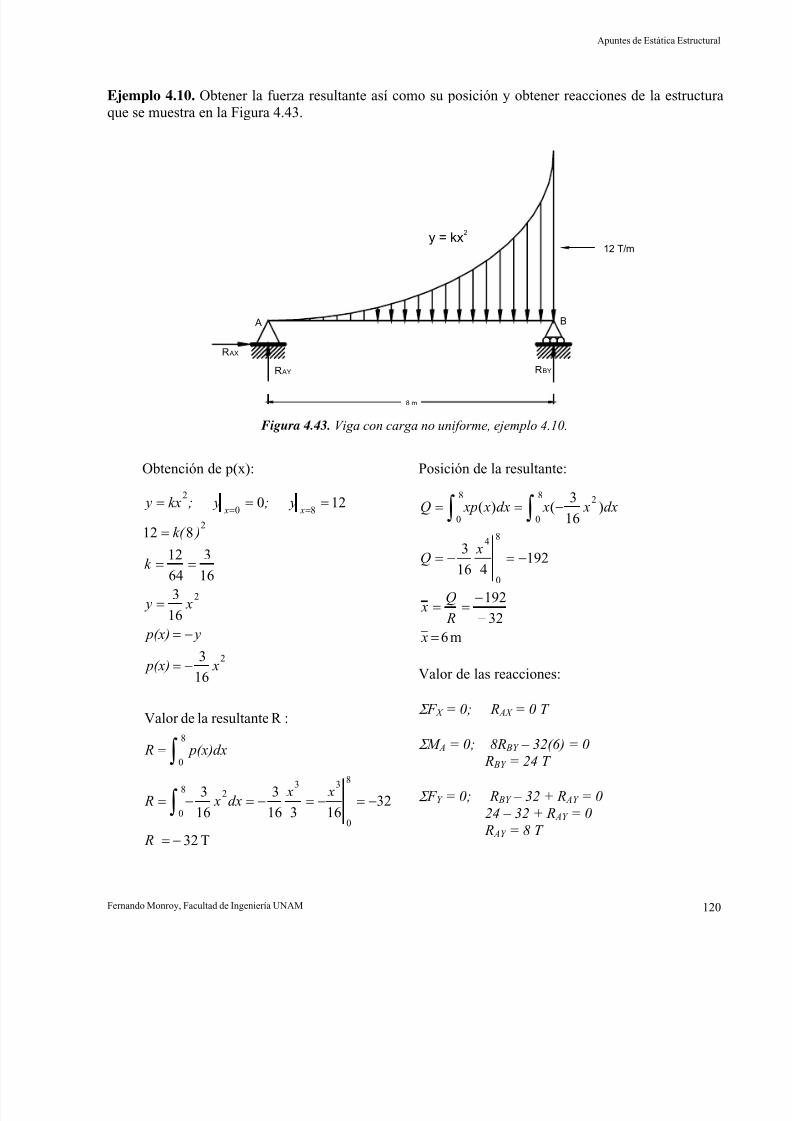
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 127/322
Apuntes de Estática Estructural
Ejemplo 4.10. Obtener la fuerza resultante así como su posición y obtener reacciones de la estructuraque se muestra en la Figura 4.43.
R AX
R AY
A
RBY
B
8 m
12 T/my = kx
2
Figura 4.43. Viga con carga no uniforme, ejemplo 4.10.
Obtención de p(x):
T32
3216316
3
16
3
:R resultanteladeValor
16
3
16
316
3
64
12
812
120
8
0
8
0
332
8
0
2
2
2
80
2
−=
−=−=−=−=
=
−=
−=
=
==
=
===
∫∫
==
R
x xdx x R
p(x)dx R
x p(x)
y p(x)
x y
k
)k(
y; y;kx y x x
Posición de la resultante:
m632
192
192416
3
)16
3()(
8
0
4
8
0
8
0
2
=−
−==
−=−=
−== ∫ ∫
x R
Q x
x
Q
dx x xdx x xpQ
Valor de las reacciones:
Σ F X = 0; R AX = 0 T
Σ M A
= 0; 8R BY
– 32(6) = 0 R BY = 24 T
Σ F Y = 0; R BY – 32 + R AY = 024 – 32 + R AY = 0 R AY = 8 T
Fernando Monroy, Facultad de Ingeniería UNAM 120
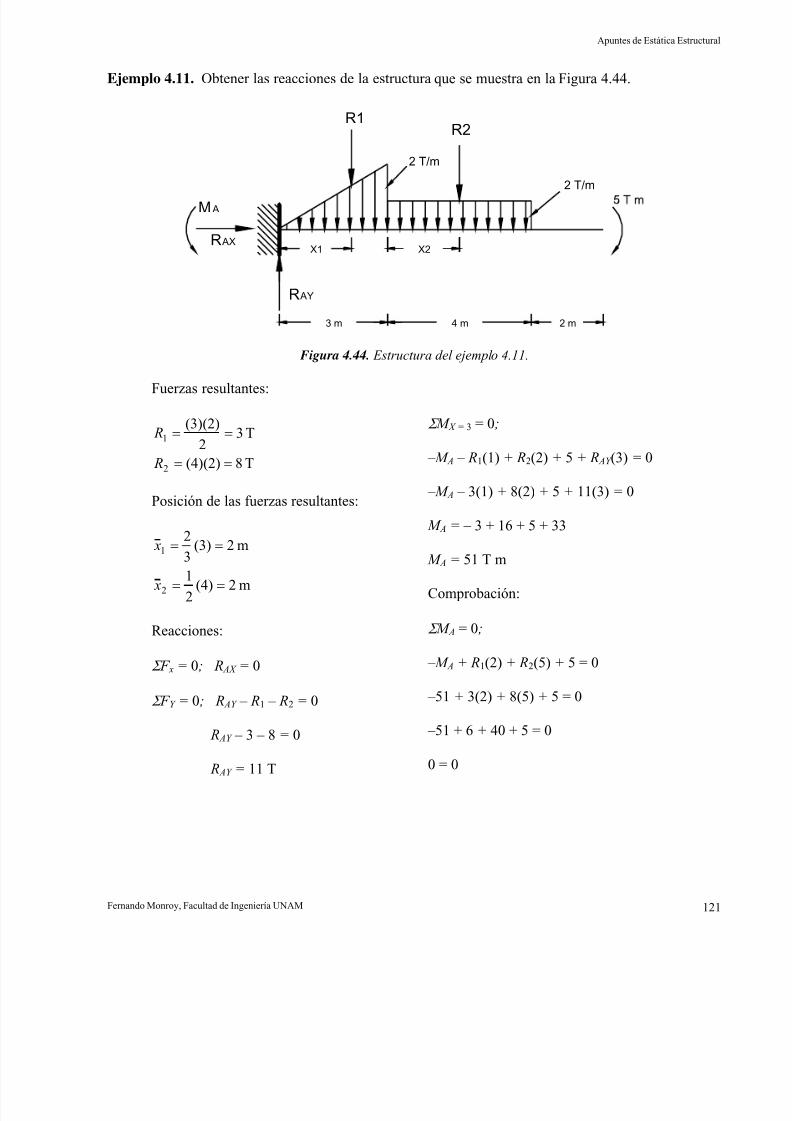
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 128/322
Apuntes de Estática Estructural
Ejemplo 4.11. Obtener las reacciones de la estructura que se muestra en la Figura 4.44.
R2R1
R AY
R AX
M A
4 m3 m 2 m
2 T/m
2 T/m
X1 X2
Figura 4.44. Estructura del ejemplo 4.11.
Fuerzas resultantes:
T8(4)(2)
T32
(3)(2)
2
1
==
==
R
R
Posición de las fuerzas resultantes:
m2(4)2
1
m2(3)
3
2
2
1
==
==
x
x
Reacciones:
Σ F x = 0; R AX = 0
Σ F Y = 0; R AY – R1 – R2 = 0
R AY – 3 – 8 = 0
R AY = 11 T
Σ M X = 3 = 0;
–M A – R1(1) + R2(2) + 5 + R AY (3) = 0
–M A – 3(1) + 8(2) + 5 + 11(3) = 0
M A = – 3 + 16 + 5 + 33
M A = 51 T m
Comprobación:
Σ M A = 0;
–M A + R1(2) + R2(5) + 5 = 0
– 51 + 3(2) + 8(5) + 5 = 0
– 51 + 6 + 40 + 5 = 0
0 = 0
Fernando Monroy, Facultad de Ingeniería UNAM 121
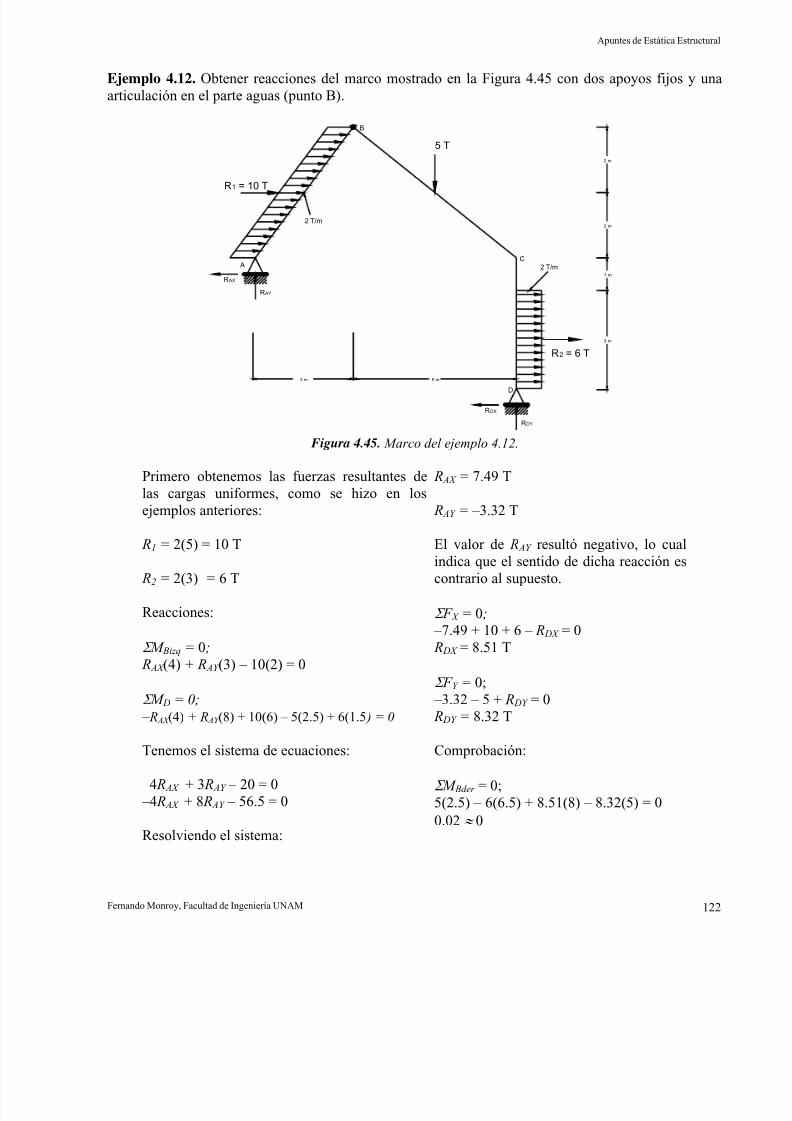
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 129/322
Apuntes de Estática Estructural
Ejemplo 4.12. Obtener reacciones del marco mostrado en la Figura 4.45 con dos apoyos fijos y unaarticulación en el parte aguas (punto B).
A
R AY
R AX
D
RDY
RDX
5 T
R1 = 10 T
2 T/m
C
B
R2 = 6 T
2 T/m
5 m3 m
3 m
1 m
2 m
2 m
Figura 4.45. Marco del ejemplo 4.12.
Primero obtenemos las fuerzas resultantes delas cargas uniformes, como se hizo en losejemplos anteriores:
R1 = 2(5) = 10 T
R2 = 2(3) = 6 T
Reacciones:
Σ M Bizq = 0; R AX (4) + R AY (3) – 10(2) = 0
Σ M D = 0; – R AX (4) + R AY (8) + 10(6) – 5(2.5) + 6(1.5 ) = 0
Tenemos el sistema de ecuaciones:
4 R AX + 3 R AY – 20 = 0 –4 R AX + 8 R AY – 56.5 = 0
Resolviendo el sistema:
R AX = 7.49 T
R AY = –3.32 T
El valor de R AY resultó negativo, lo cual
indica que el sentido de dicha reacción escontrario al supuesto.
Σ F X = 0; –7.49 + 10 + 6 – R DX = 0 R DX = 8.51 T
Σ F Y = 0; –3.32 – 5 + R DY = 0 R DY = 8.32 T
Comprobación:
Σ M Bder = 0; 5(2.5) – 6(6.5) + 8.51(8) – 8.32(5) = 00.02 ≈ 0
Fernando Monroy, Facultad de Ingeniería UNAM 122
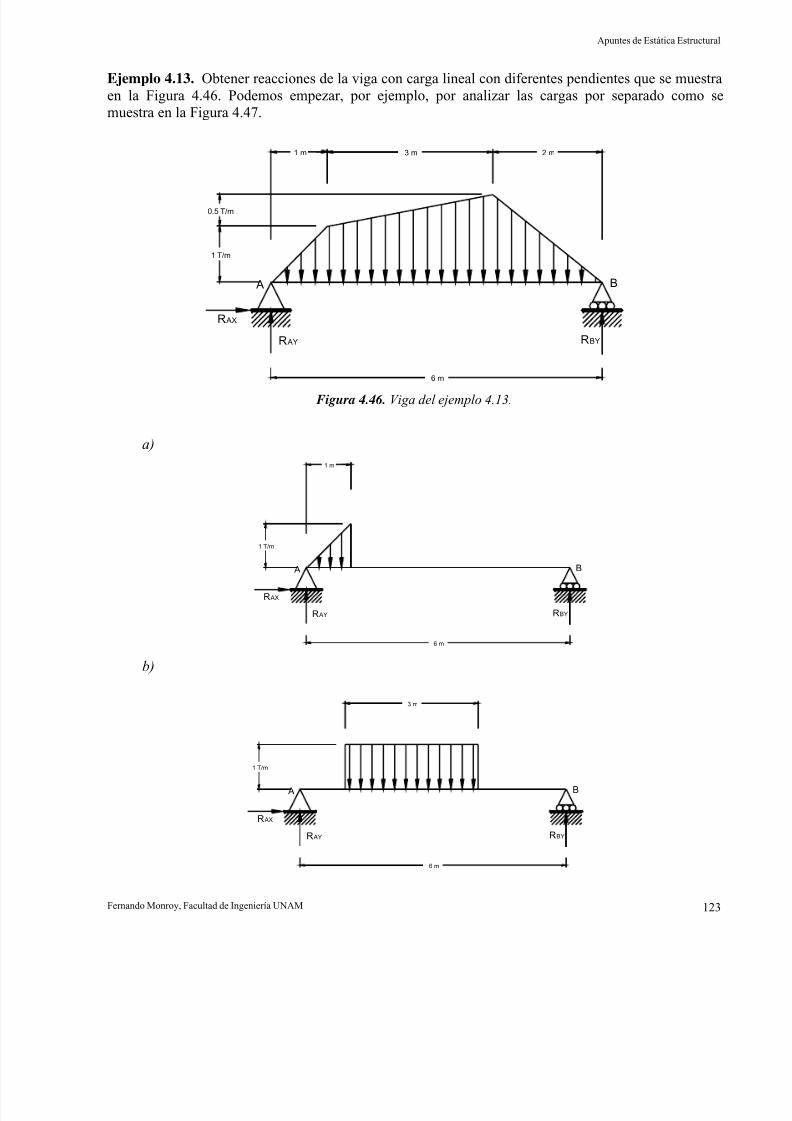
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 130/322
Apuntes de Estática Estructural
Ejemplo 4.13. Obtener reacciones de la viga con carga lineal con diferentes pendientes que se muestraen la Figura 4.46. Podemos empezar, por ejemplo, por analizar las cargas por separado como semuestra en la Figura 4.47.
R AX
R AY
A
6 m
3 m
RBY
B
2 m1 m
1 T/m
0.5 T/m
Figura 4.46. Viga del ejemplo 4.13.
Fernando Monroy, Facultad de Ingeniería UNAM 123
a)
1 T/m
1 m
A
R AY
R AX
B
RBY
6 m
b)
1 T/m
A
R AY
R AX
B
RBY
3 m
6 m
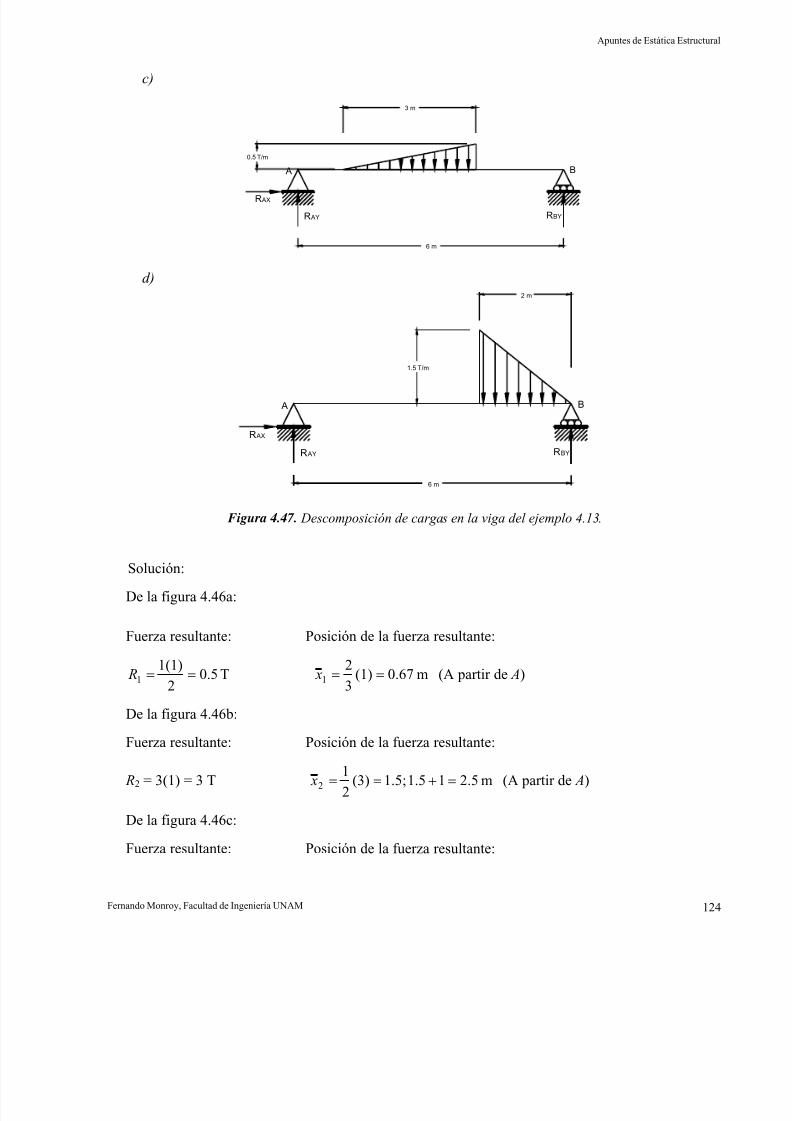
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 131/322
Apuntes de Estática Estructural
c)
0.5 T/m
A
R AY
R AX
B
RBY
3 m
6 m
d)
A
R AY
R AX
2 m
B
RBY
6 m
1.5 T/m
Figura 4.47. Descomposición de cargas en la viga del ejemplo 4.13.
Solución:
De la figura 4.46a:
Fuerza resultante: Posición de la fuerza resultante:
T0.52
1(1)1 == R m0.67(1)
3
21 == x (A partir de A)
De la figura 4.46b:
Fuerza resultante: Posición de la fuerza resultante:
R2 = 3(1) = 3 T m2.511.51.5;(3)2
12 =+== x (A partir de A)
De la figura 4.46c:
Fuerza resultante: Posición de la fuerza resultante:
Fernando Monroy, Facultad de Ingeniería UNAM 124
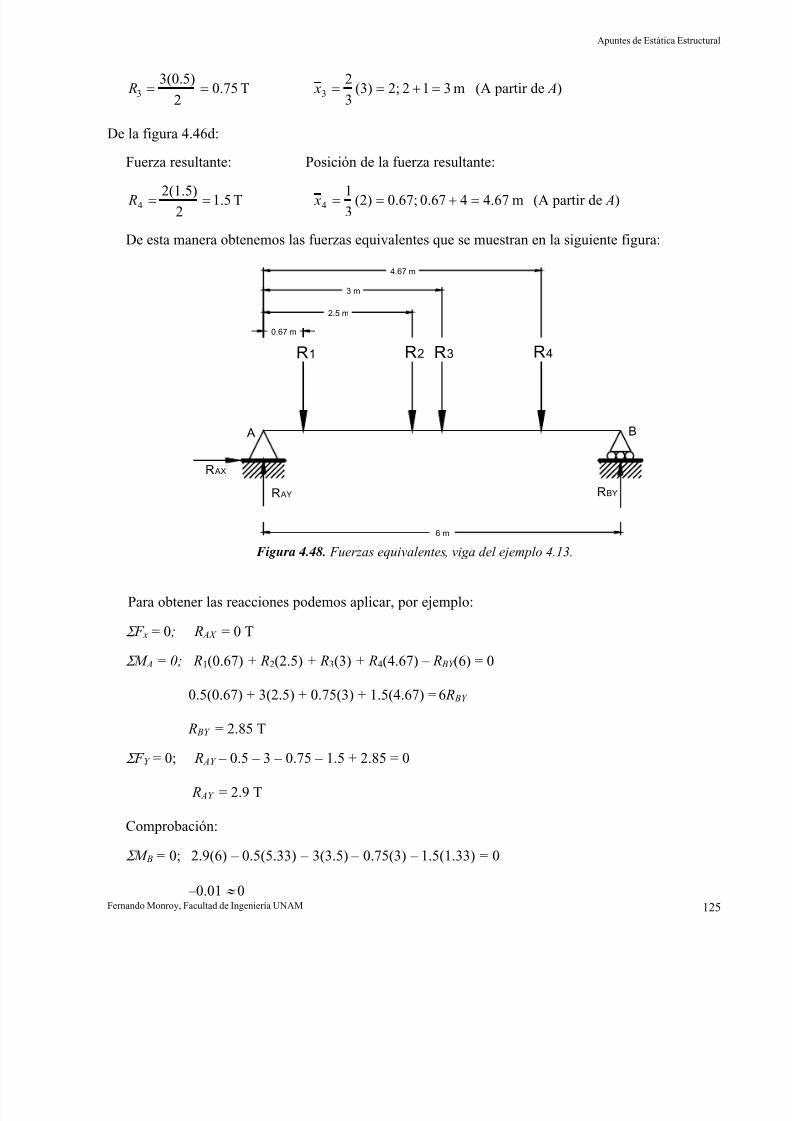
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 132/322
Apuntes de Estática Estructural
T0.752
3(0.5)3 == R m3122;(3)
3
23 =+== x (A partir de A)
De la figura 4.46d:
Fuerza resultante: Posición de la fuerza resultante:
T1.52
2(1.5)4 == R m4.6740.670.67;(2)
31
4 =+== x (A partir de A)
De esta manera obtenemos las fuerzas equivalentes que se muestran en la siguiente figura:
R AX
R AY
A
6 m
RBY
B
R1 R2 R3 R4
0.67 m
2.5 m
3 m
4.67 m
Figura 4.48. Fuerzas equivalentes, viga del ejemplo 4.13.
Para obtener las reacciones podemos aplicar, por ejemplo:
Σ F x = 0; R AX = 0 T
Σ M A = 0; R1(0.67) + R2(2.5) + R3(3) + R4(4.67) – R BY (6) = 0
0.5(0.67) + 3(2.5) + 0.75(3) + 1.5(4.67) = 6 R BY
R BY = 2.85 T
Σ F Y = 0; R AY – 0.5 – 3 – 0.75 – 1.5 + 2.85 = 0
R AY = 2.9 T
Comprobación:
Σ M B = 0; 2.9(6) – 0.5(5.33) – 3(3.5) – 0.75(3) – 1.5(1.33) = 0B
Fernando Monroy, Facultad de Ingeniería UNAM 125 –0.01 ≈ 0
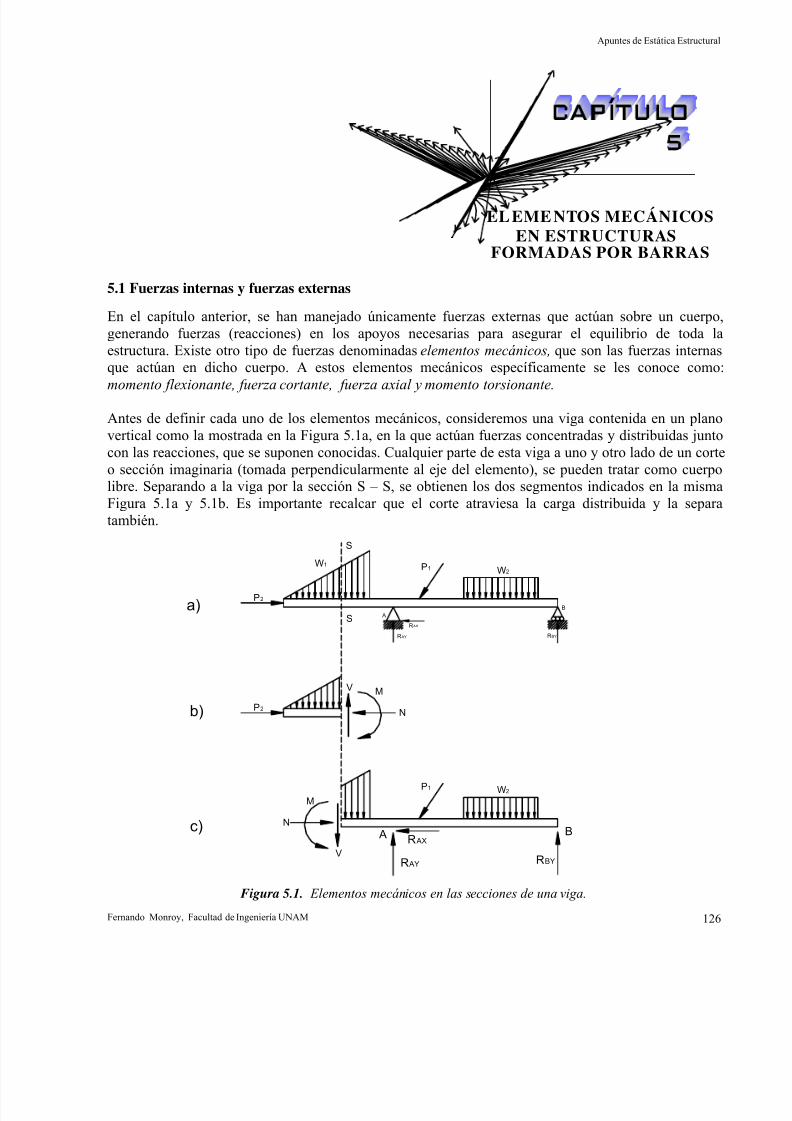
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 133/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 126
V
M
NB
RBY
A RAX
RAY
W2P1
P2
W1
P2
S
N
MV
P1 W2
A
RAX
RBY
B
RAY
S
a)
b)
c)
ELEME NTOS MECÁNICOS EN ESTRUCTURAS FORMADAS POR BARRAS
5.1 Fuerzas internas y fuerzas externas
En el capítulo anterior, se han manejado únicamente fuerzas externas que actúan sobre un cuerpo,generando fuerzas (reacciones) en los apoyos necesarias para asegurar el equilibrio de toda laestructura. Existe otro tipo de fuerzas denominadas elementos mecánicos, que son las fuerzas internasque actúan en dicho cuerpo. A estos elementos mecánicos específicamente se les conoce como:momento flexionante, fuerza cortante, fuerza axial y momento torsionante.
Antes de definir cada uno de los elementos mecánicos, consideremos una viga contenida en un planovertical como la mostrada en la Figura 5.1a, en la que actúan fuerzas concentradas y distribuidas juntocon las reacciones, que se suponen conocidas. Cualquier parte de esta viga a uno y otro lado de un corteo sección imaginaria (tomada perpendicularmente al eje del elemento), se pueden tratar como cuerpolibre. Separando a la viga por la sección S – S, se obtienen los dos segmentos indicados en la mismaFigura 5.1a y 5.1b. Es importante recalcar que el corte atraviesa la carga distribuida y la separatambién.
Figura 5.1. Elementos mecánicos en las secciones de una viga.
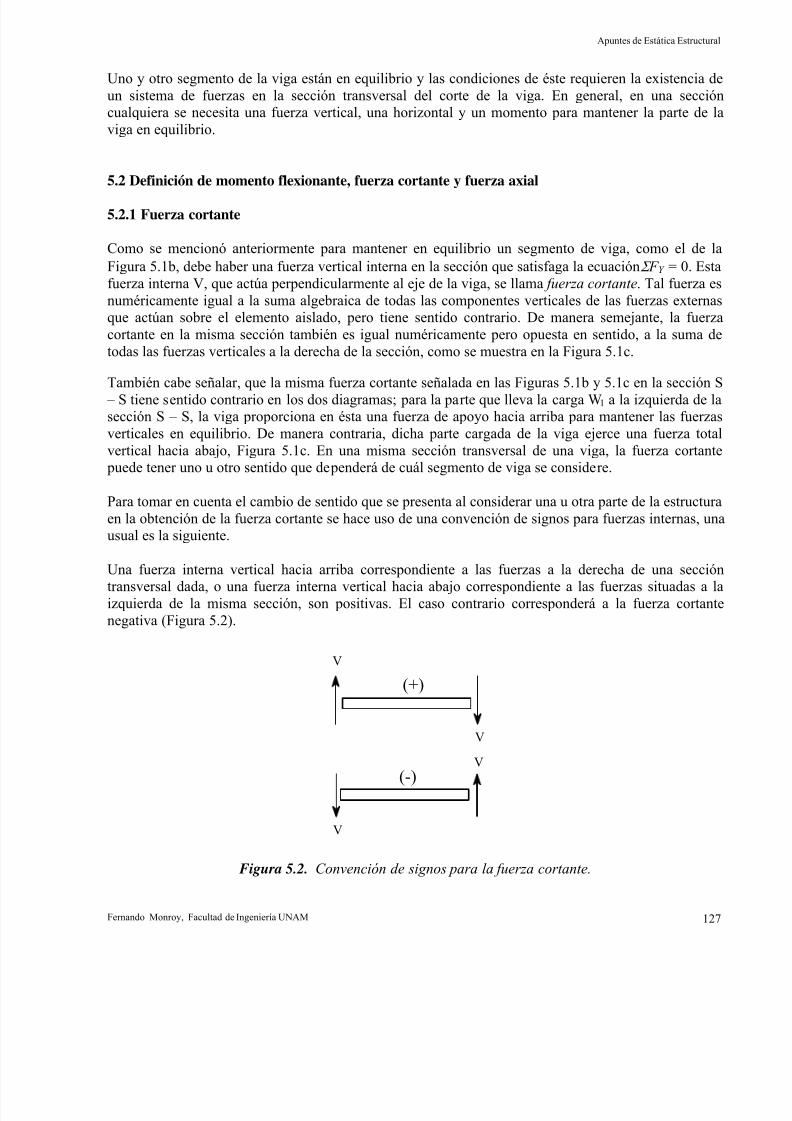
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 134/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 127
Uno y otro segmento de la viga están en equilibrio y las condiciones de éste requieren la existencia deun sistema de fuerzas en la sección transversal del corte de la viga. En general, en una seccióncualquiera se necesita una fuerza vertical, una horizontal y un momento para mantener la parte de laviga en equilibrio.
5.2 Definición de momento flexionante, fuerza cortante y fuerza axial
5.2.1 Fuerza cortante
Como se mencionó anteriormente para mantener en equilibrio un segmento de viga, como el de laFigura 5.1b, debe haber una fuerza vertical interna en la sección que satisfaga la ecuación Σ F Y = 0. Estafuerza interna V, que actúa perpendicularmente al eje de la viga, se llama fuerza cortante. Tal fuerza esnuméricamente igual a la suma algebraica de todas las componentes verticales de las fuerzas externasque actúan sobre el elemento aislado, pero tiene sentido contrario. De manera semejante, la fuerzacortante en la misma sección también es igual numéricamente pero opuesta en sentido, a la suma detodas las fuerzas verticales a la derecha de la sección, como se muestra en la Figura 5.1c.
También cabe señalar, que la misma fuerza cortante señalada en las Figuras 5.1b y 5.1c en la sección S – S tiene sentido contrario en los dos diagramas; para la parte que lleva la carga W1 a la izquierda de lasección S – S, la viga proporciona en ésta una fuerza de apoyo hacia arriba para mantener las fuerzasverticales en equilibrio. De manera contraria, dicha parte cargada de la viga ejerce una fuerza totalvertical hacia abajo, Figura 5.1c. En una misma sección transversal de una viga, la fuerza cortante puede tener uno u otro sentido que dependerá de cuál segmento de viga se considere.
Para tomar en cuenta el cambio de sentido que se presenta al considerar una u otra parte de la estructuraen la obtención de la fuerza cortante se hace uso de una convención de signos para fuerzas internas, unausual es la siguiente.
Una fuerza interna vertical hacia arriba correspondiente a las fuerzas a la derecha de una seccióntransversal dada, o una fuerza interna vertical hacia abajo correspondiente a las fuerzas situadas a laizquierda de la misma sección, son positivas. El caso contrario corresponderá a la fuerza cortantenegativa (Figura 5.2).
(+)
V
(-)V
V
V
Figura 5.2. Convención de signos para la fuerza cortante.
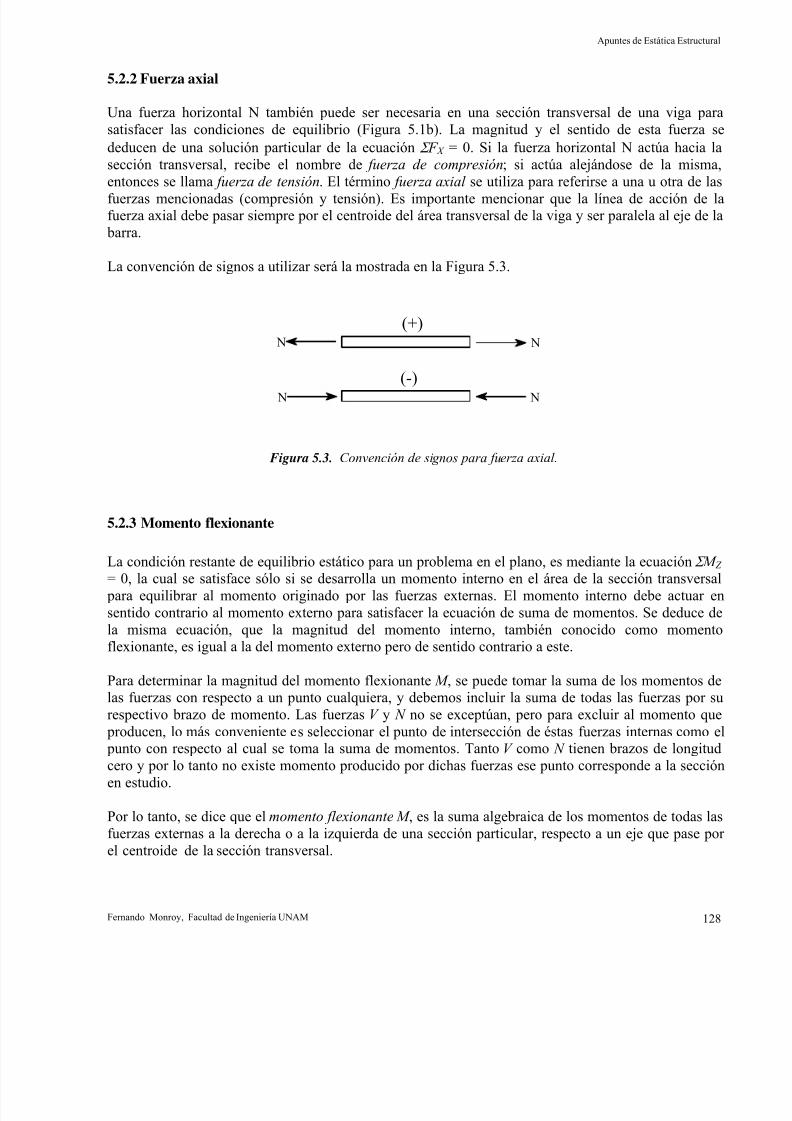
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 135/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 128
5.2.2 Fuerza axial
Una fuerza horizontal N también puede ser necesaria en una sección transversal de una viga parasatisfacer las condiciones de equilibrio (Figura 5.1b). La magnitud y el sentido de esta fuerza sededucen de una solución particular de la ecuación Σ F X = 0. Si la fuerza horizontal N actúa hacia lasección transversal, recibe el nombre de fuerza de compresión; si actúa alejándose de la misma,
entonces se llama fuerza de tensión. El término fuerza axial se utiliza para referirse a una u otra de lasfuerzas mencionadas (compresión y tensión). Es importante mencionar que la línea de acción de lafuerza axial debe pasar siempre por el centroide del área transversal de la viga y ser paralela al eje de la barra.
La convención de signos a utilizar será la mostrada en la Figura 5.3.
(+) N
(-) N
N
N
Figura 5.3. Convención de signos para fuerza axial.
5.2.3 Momento flexionante
La condición restante de equilibrio estático para un problema en el plano, es mediante la ecuación Σ M Z = 0, la cual se satisface sólo si se desarrolla un momento interno en el área de la sección transversal para equilibrar al momento originado por las fuerzas externas. El momento interno debe actuar ensentido contrario al momento externo para satisfacer la ecuación de suma de momentos. Se deduce dela misma ecuación, que la magnitud del momento interno, también conocido como momentoflexionante, es igual a la del momento externo pero de sentido contrario a este.
Para determinar la magnitud del momento flexionante M , se puede tomar la suma de los momentos delas fuerzas con respecto a un punto cualquiera, y debemos incluir la suma de todas las fuerzas por surespectivo brazo de momento. Las fuerzas V y N no se exceptúan, pero para excluir al momento que producen, lo más conveniente es seleccionar el punto de intersección de éstas fuerzas internas como el
punto con respecto al cual se toma la suma de momentos. Tanto V como N tienen brazos de longitudcero y por lo tanto no existe momento producido por dichas fuerzas ese punto corresponde a la secciónen estudio.
Por lo tanto, se dice que el momento flexionante M , es la suma algebraica de los momentos de todas lasfuerzas externas a la derecha o a la izquierda de una sección particular, respecto a un eje que pase porel centroide de la sección transversal.
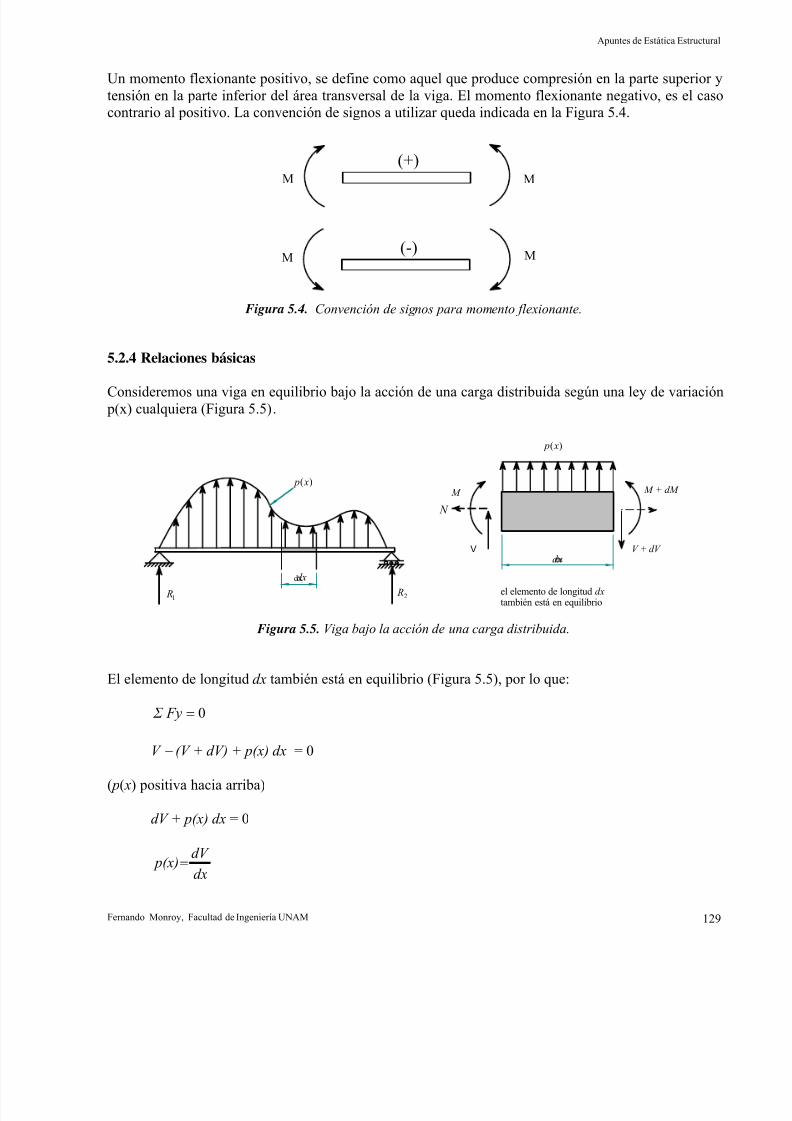
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 136/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 129
Un momento flexionante positivo, se define como aquel que produce compresión en la parte superior ytensión en la parte inferior del área transversal de la viga. El momento flexionante negativo, es el casocontrario al positivo. La convención de signos a utilizar queda indicada en la Figura 5.4.
(+)M
(-) M
M
M
Figura 5.4. Convención de signos para momento flexionante.
5.2.4 Relaciones básicas
Consideremos una viga en equilibrio bajo la acción de una carga distribuida según una ley de variación p(x) cualquiera (Figura 5.5).
el elemento de longitud dxtambién está en equilibrio
M + dM
V
M
V + dV
1 R
)( x p
2 R
51dxdx
N
)( x p
16dxdx
Figura 5.5. Viga bajo la acción de una carga distribuida.
El elemento de longitud dx también está en equilibrio (Figura 5.5), por lo que:
0= Fy Σ
V − (V + dV) + p(x) dx = 0
( p( x) positiva hacia arriba)
dV + p(x) dx = 0
dx
dV p(x)=

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 137/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 130
La ecuación anterior relaciona la fuerza cortante con la carga distribuida, ahora en la siguiente relaciónse despreciarán los términos de orden superior.
00 = M Σ
M − (M + dM) + V dx + p(x) dx 02
=dx
− dM + V dx = 0
dx
dM V =
La ecuación anterior establece que la derivada de la función de momento flexionante es igual a lafunción de fuerza cortante.
5.3 Obtención de elementos mecánicos para vigas y marcos
De manera general los elementos mecánicos en cualquier sección de una estructura, se pueden obteneraplicando el método de las secciones. Dicho método lo podemos resumir en los siguientes cuatro pasos:
1. Obtener reacciones.2. Hacer un corte en el punto en donde se quieren obtener los elementos mecánicos.3. Aislar ambas partes de la estructura.4. Aplicar las ecuaciones de equilibrio estático.
Veamos un ejemplo, para el caso de una viga en la que queremos conocer los elementos mecánicos en
un punto específico.
En la Figura 5.6, tenemos una viga bajo la acción de una carga concentrada al centro del claro, ydeseamos conocer los elementos mecánicos en el corte C – C.
A
RAY
RAX
B
RBY
L/2L/2
P
C
C
3L/4
Figura 5.6. Viga bajo la acción de una carga concentrada.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 138/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 131
Como primer paso, debemos obtener las reacciones en los apoyos, las cuales podemos obtener, demanera general, mediante la aplicación de las ecuaciones de equilibrio estático. En este caso, como sólose trata de una carga concentrada aplicada al centro del claro, por simetría sabemos que cada apoyodeberá soportar la mitad de la carga. La reacción horizontal en A es cero, debido a que no existenfuerzas paralelas a la viga actuando sobre ella. Ahora que ya conocemos las reacciones, (Figura 5.7),hagamos un corte en C – C para aislar las dos secciones (Figura 5.8).
L/2
RAY = P2
A
3L/4
C
C
P
L/2
RBY = P2
B
Figura 5.7. Reacciones obtenidas en los apoyos.
Si, aplicamos la ecuación Σ F Y = 0 a la parte izquierda de la sección C – C, en donde, desde luego,debemos de incluir a las fuerzas R AY y P y a la fuerza cortante V para mantener el equilibrio de lamisma, tenemos:
2
2
0
P V
V P P
V P Ay
R
=
−=−
=+−
En forma similar para Σ M = 0, tenemos:
8
84
04
1
4
3
04
1
4
3
PL M
3PL PL M
M L) P( L)( 2
P
M L) P( L)( Ay
R
+=
+−=
=−−
=−−
Si realizamos los pasos anteriores, pero ahora para la sección a la derecha del corte C – C, llegamos alos valores:
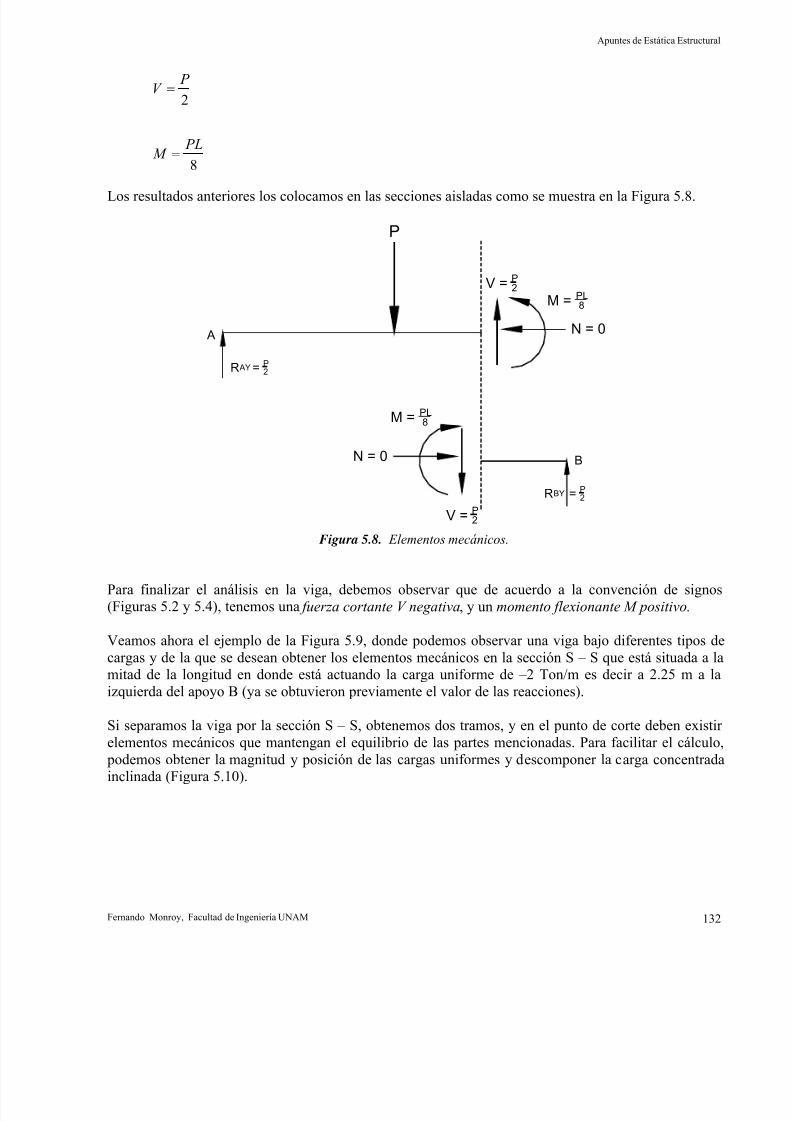
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 139/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 132
8
2
PL M
P V
=
=
Los resultados anteriores los colocamos en las secciones aisladas como se muestra en la Figura 5.8.
A
RAY = P
2
P
B
RBY = P2
N = 0
M = PL8
V = P2
V = P2
M = PL8
N = 0
Figura 5.8. Elementos mecánicos.
Para finalizar el análisis en la viga, debemos observar que de acuerdo a la convención de signos(Figuras 5.2 y 5.4), tenemos una fuerza cortante V negativa, y un momento flexionante M positivo.
Veamos ahora el ejemplo de la Figura 5.9, donde podemos observar una viga bajo diferentes tipos decargas y de la que se desean obtener los elementos mecánicos en la sección S – S que está situada a lamitad de la longitud en donde está actuando la carga uniforme de –2 Ton/m es decir a 2.25 m a laizquierda del apoyo B (ya se obtuvieron previamente el valor de las reacciones).
Si separamos la viga por la sección S – S, obtenemos dos tramos, y en el punto de corte deben existirelementos mecánicos que mantengan el equilibrio de las partes mencionadas. Para facilitar el cálculo, podemos obtener la magnitud y posición de las cargas uniformes y descomponer la carga concentradainclinada (Figura 5.10).
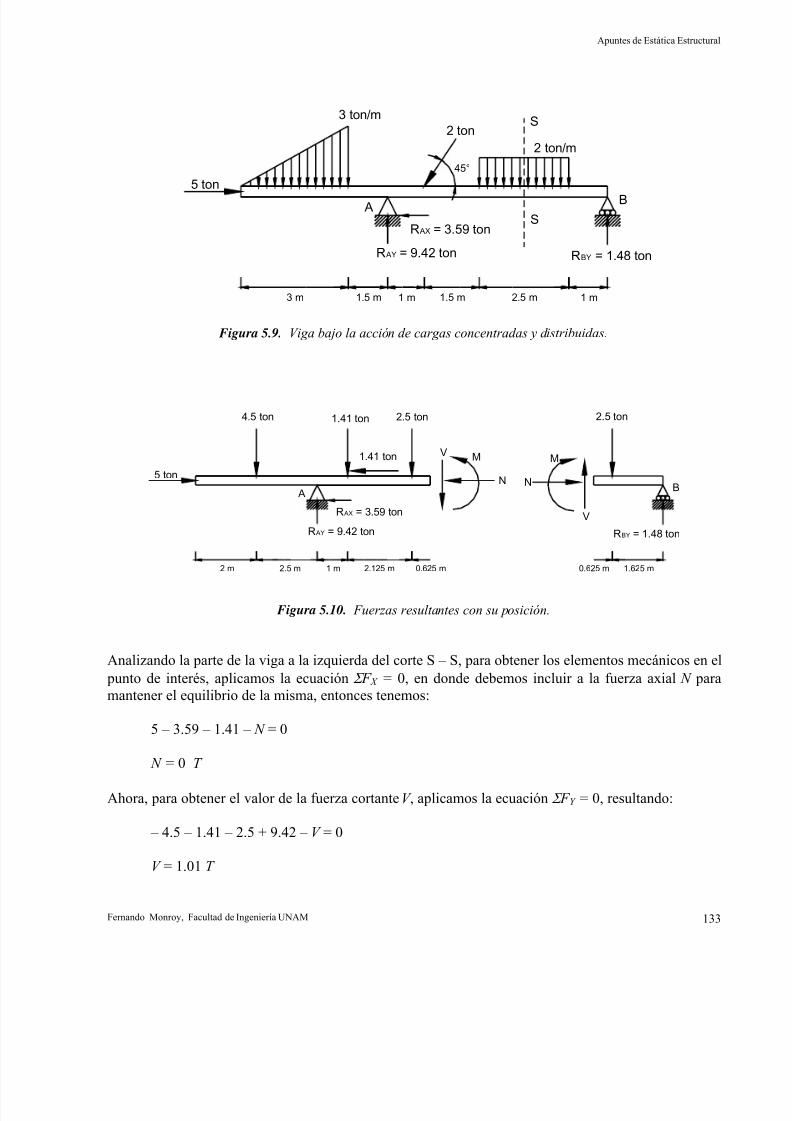
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 140/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 133
1.5 m
3 ton/m
3 m
5 ton
1 m2.5 m1.5 m1 m
45°
A
RAY = 9.42 ton
RAX = 3.59 ton
B
2 ton2 ton/m
S
S
RBY = 1.48 ton
Figura 5.9. Viga bajo la acción de cargas concentradas y distribuidas.
5 ton
MV
RAY = 9.42 ton
2.5 m2 m
4.5 ton 2.5 ton
0.625 m2.125 m
1.41 ton
1.41 ton
RAX = 3.59 ton
A
1 m
RBY = 1.48 ton
B
0.625 m 1.625 m
2.5 ton
M
V
N N
Figura 5.10. Fuerzas resultantes con su posición.
Analizando la parte de la viga a la izquierda del corte S – S, para obtener los elementos mecánicos en el punto de interés, aplicamos la ecuación Σ F X = 0, en donde debemos incluir a la fuerza axial N paramantener el equilibrio de la misma, entonces tenemos:
5 – 3.59 – 1.41 – N = 0
N = 0 T
Ahora, para obtener el valor de la fuerza cortante V , aplicamos la ecuación Σ F Y = 0, resultando:
– 4.5 – 1.41 – 2.5 + 9.42 – V = 0
V = 1.01 T
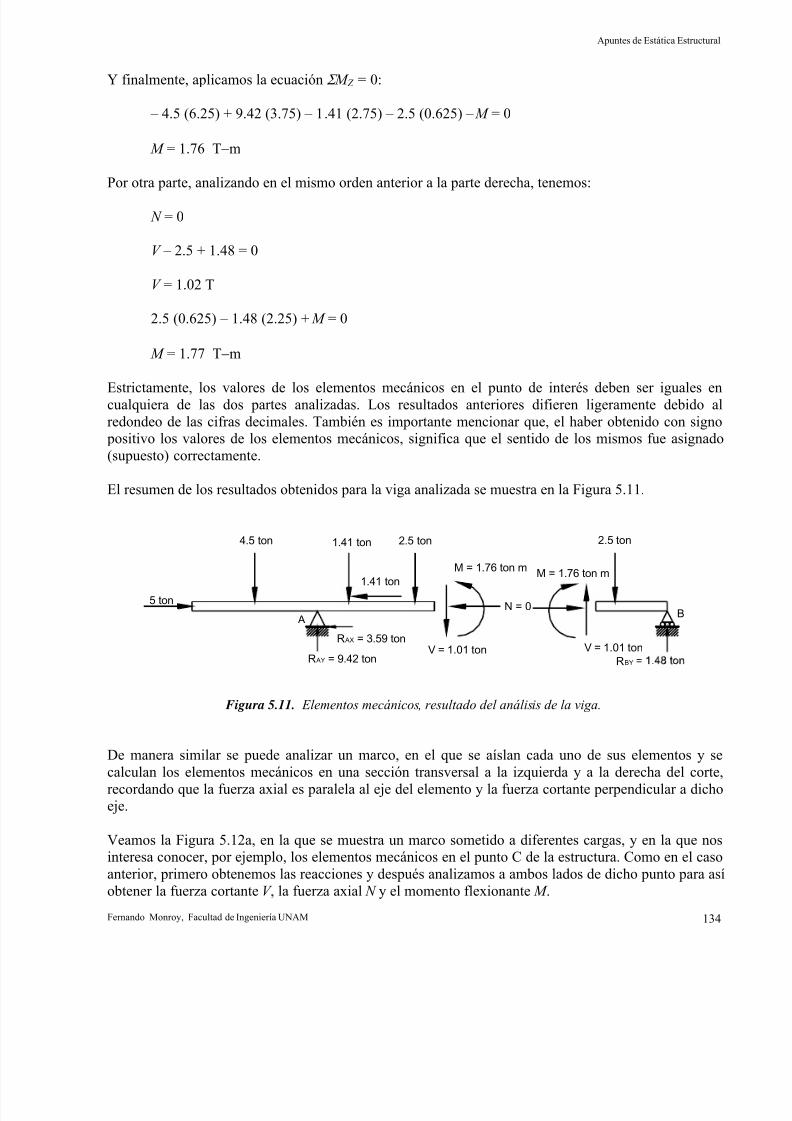
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 141/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 134
Y finalmente, aplicamos la ecuación Σ M Z = 0:
– 4.5 (6.25) + 9.42 (3.75) – 1.41 (2.75) – 2.5 (0.625) – M = 0
M = 1.76 T−m
Por otra parte, analizando en el mismo orden anterior a la parte derecha, tenemos:
N = 0
V – 2.5 + 1.48 = 0
V = 1.02 T
2.5 (0.625) – 1.48 (2.25) + M = 0
M = 1.77 T−m
Estrictamente, los valores de los elementos mecánicos en el punto de interés deben ser iguales encualquiera de las dos partes analizadas. Los resultados anteriores difieren ligeramente debido alredondeo de las cifras decimales. También es importante mencionar que, el haber obtenido con signo positivo los valores de los elementos mecánicos, significa que el sentido de los mismos fue asignado(supuesto) correctamente.
El resumen de los resultados obtenidos para la viga analizada se muestra en la Figura 5.11.
5 ton
M = 1.76 ton m
V = 1.01 tonRAY = 9.42 ton
4.5 ton 2.5 ton
1.41 ton
1.41 ton
RAX = 3.59 ton
A
RBY
B
2.5 ton
M = 1.76 ton m
V = 1.01 ton
N = 0
Figura 5.11. Elementos mecánicos, resultado del análisis de la viga.
De manera similar se puede analizar un marco, en el que se aíslan cada uno de sus elementos y secalculan los elementos mecánicos en una sección transversal a la izquierda y a la derecha del corte,recordando que la fuerza axial es paralela al eje del elemento y la fuerza cortante perpendicular a dichoeje.
Veamos la Figura 5.12a, en la que se muestra un marco sometido a diferentes cargas, y en la que nosinteresa conocer, por ejemplo, los elementos mecánicos en el punto C de la estructura. Como en el casoanterior, primero obtenemos las reacciones y después analizamos a ambos lados de dicho punto para asíobtener la fuerza cortante V , la fuerza axial N y el momento flexionante M .
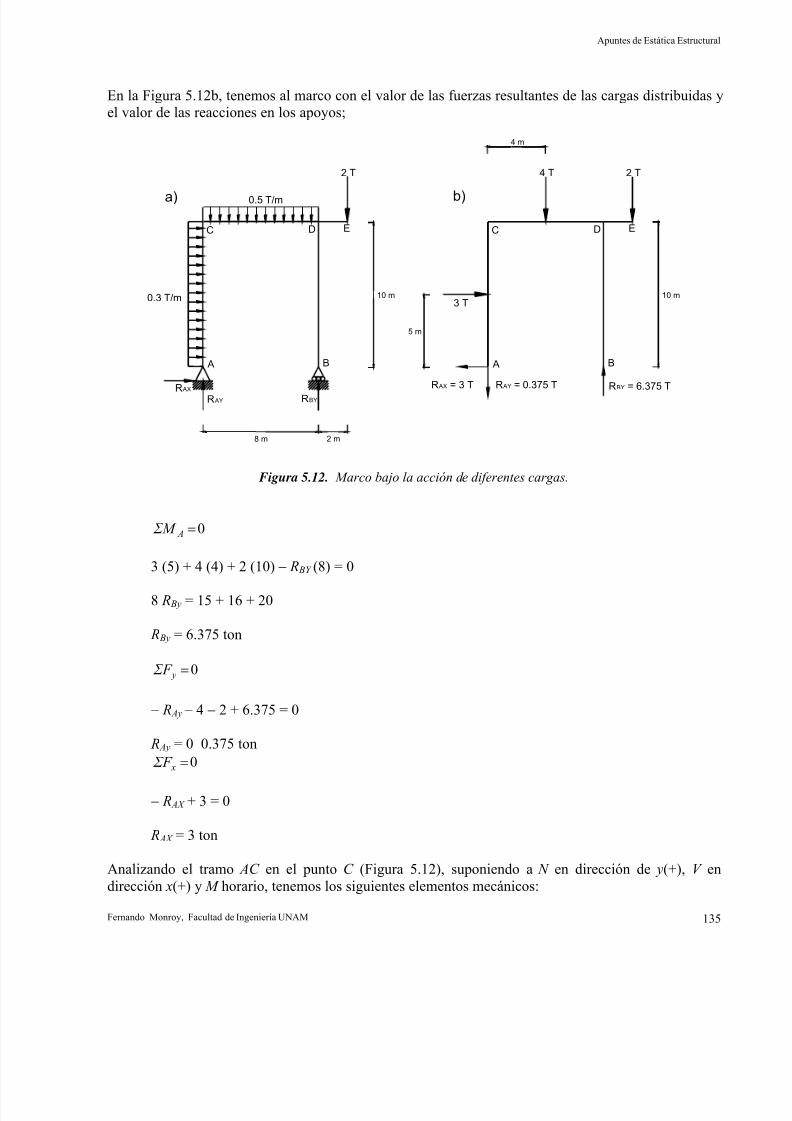
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 142/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 135
En la Figura 5.12b, tenemos al marco con el valor de las fuerzas resultantes de las cargas distribuidas yel valor de las reacciones en los apoyos;
a)
0.3 T/m
A
C
RAY
RAX
4 m
b)
5 m
3 T
C
A
2 T
10 m
2 m8 m
RBY
B
ED
0.5 T/m
4 T
D E
B
10 m
2 T
RBY = 6.375 TRAY = 0.375 TRAX = 3 T
Figura 5.12. Marco bajo la acción de diferentes cargas.
0= A Σ M
3 (5) + 4 (4) + 2 (10) − R BY (8) = 0
8 R By = 15 + 16 + 20
R By = 6.375 ton
0= y Σ F
− R Ay − 4 − 2 + 6.375 = 0
R Ay
= 0 0.375 ton0= x Σ F
− R AX + 3 = 0
R AX = 3 ton
Analizando el tramo AC en el punto C (Figura 5.12), suponiendo a N en dirección de y(+), V endirección x(+) y M horario, tenemos los siguientes elementos mecánicos:
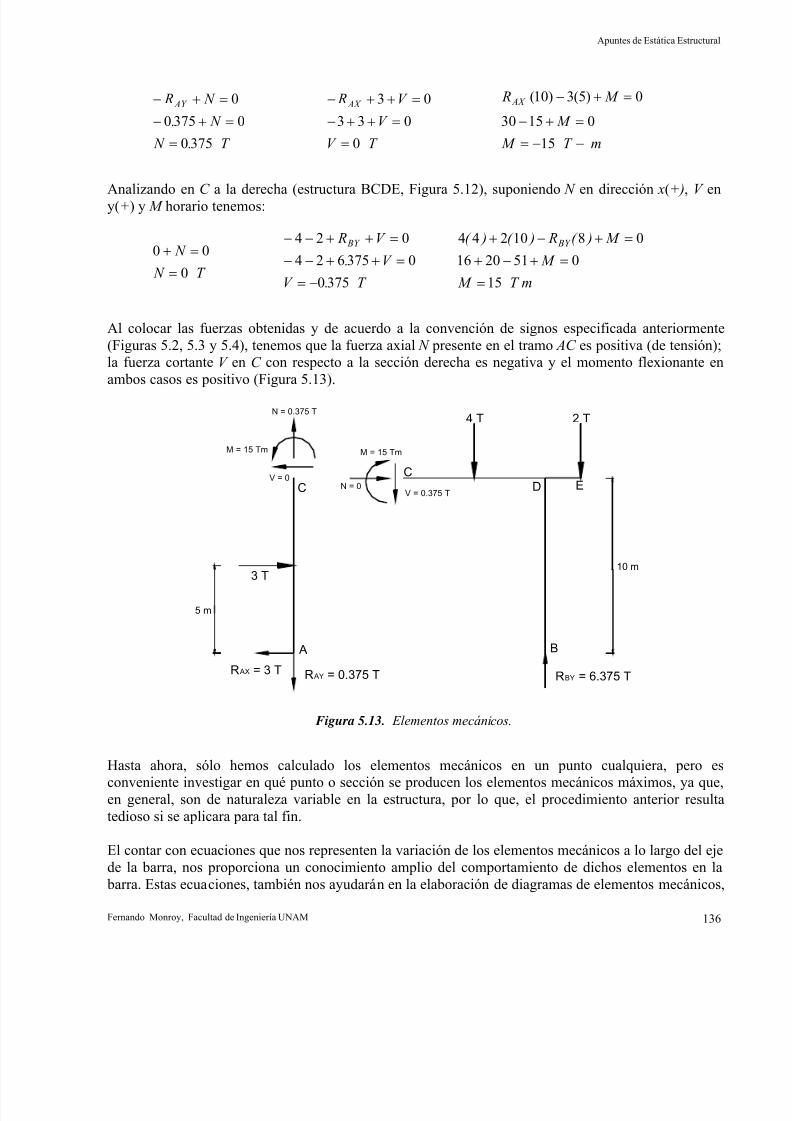
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 143/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 136
T . N
N .
N R AY
3750
03750
0
=
=+−
=+−
T V
V
V R AX
0
033
03
=
=++−
=++−
m T M
M
M R AX
−−=
=+−
=+−
15
01530
0)5(3)10(
Analizando en C a la derecha (estructura BCDE, Figura 5.12), suponiendo N en dirección x(+), V eny(+) y M horario tenemos:
T N
N
0
00
=
=+
T .V
V .
V R BY
3750
0375624
024
−=
=++−−
=++−−
T m M
M
M )( R )( )( BY
15
0512016
0810244
=
=+−+
=+−+
Al colocar las fuerzas obtenidas y de acuerdo a la convención de signos especificada anteriormente(Figuras 5.2, 5.3 y 5.4), tenemos que la fuerza axial N presente en el tramo AC es positiva (de tensión);la fuerza cortante V en C con respecto a la sección derecha es negativa y el momento flexionante en
ambos casos es positivo (Figura 5.13).
5 m
CN = 0
M = 15 Tm
V = 0.375 T
N = 0.375 T
M = 15 Tm
V = 0
B
4 T
D
A
C
3 T
E
10 m
2 T
RBY = 6.375 TRAX = 3 T RAY = 0.375 T
Figura 5.13. Elementos mecánicos.
Hasta ahora, sólo hemos calculado los elementos mecánicos en un punto cualquiera, pero esconveniente investigar en qué punto o sección se producen los elementos mecánicos máximos, ya que,en general, son de naturaleza variable en la estructura, por lo que, el procedimiento anterior resultatedioso si se aplicara para tal fin.
El contar con ecuaciones que nos representen la variación de los elementos mecánicos a lo largo del ejede la barra, nos proporciona un conocimiento amplio del comportamiento de dichos elementos en la barra. Estas ecuaciones, también nos ayudarán en la elaboración de diagramas de elementos mecánicos,
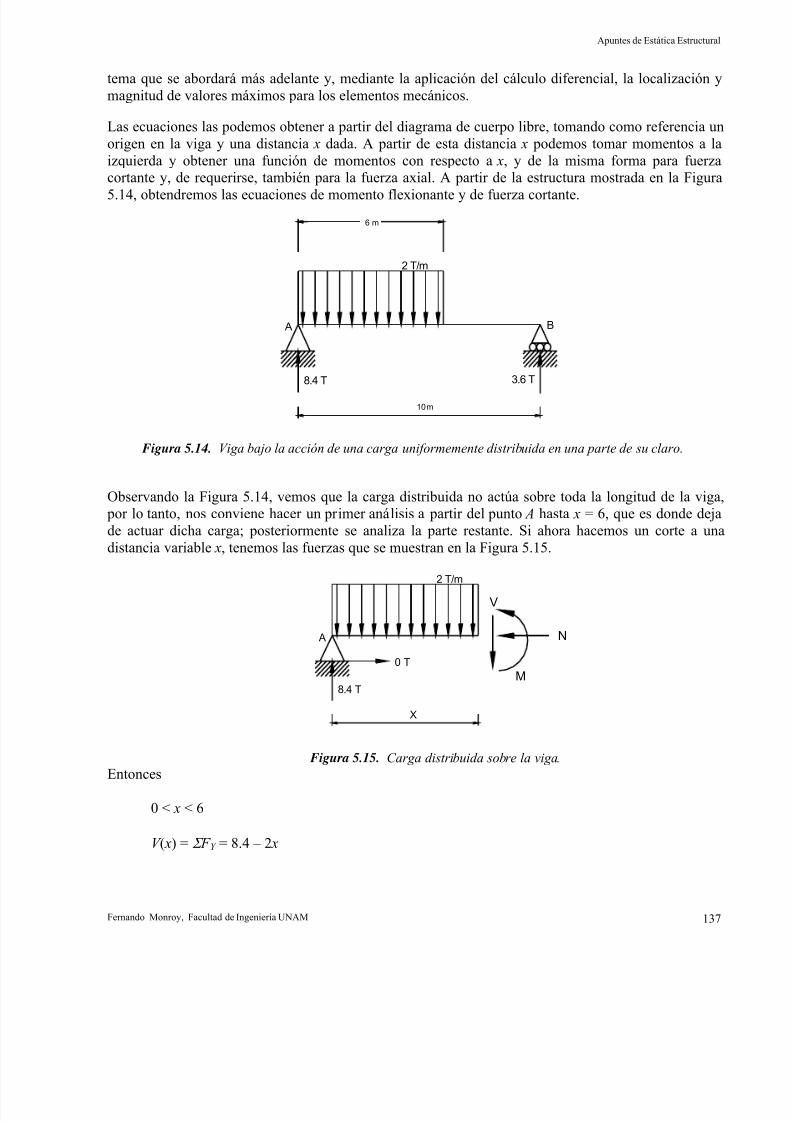
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 144/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 137
tema que se abordará más adelante y, mediante la aplicación del cálculo diferencial, la localización ymagnitud de valores máximos para los elementos mecánicos.
Las ecuaciones las podemos obtener a partir del diagrama de cuerpo libre, tomando como referencia unorigen en la viga y una distancia x dada. A partir de esta distancia x podemos tomar momentos a laizquierda y obtener una función de momentos con respecto a x, y de la misma forma para fuerzacortante y, de requerirse, también para la fuerza axial. A partir de la estructura mostrada en la Figura5.14, obtendremos las ecuaciones de momento flexionante y de fuerza cortante.
3.6 T
B
8.4 T
2 T/m
A
6 m
10 m
Figura 5.14. Viga bajo la acción de una carga uniformemente distribuida en una parte de su claro.
Observando la Figura 5.14, vemos que la carga distribuida no actúa sobre toda la longitud de la viga, por lo tanto, nos conviene hacer un primer análisis a partir del punto A hasta x = 6, que es donde dejade actuar dicha carga; posteriormente se analiza la parte restante. Si ahora hacemos un corte a unadistancia variable x, tenemos las fuerzas que se muestran en la Figura 5.15.
8.4 T
2 T/m
A
V
M
X
N
0 T
Figura 5.15. Carga distribuida sobre la viga.
Entonces
0 < x < 6
V ( x) = Σ F Y = 8.4 – 2 x
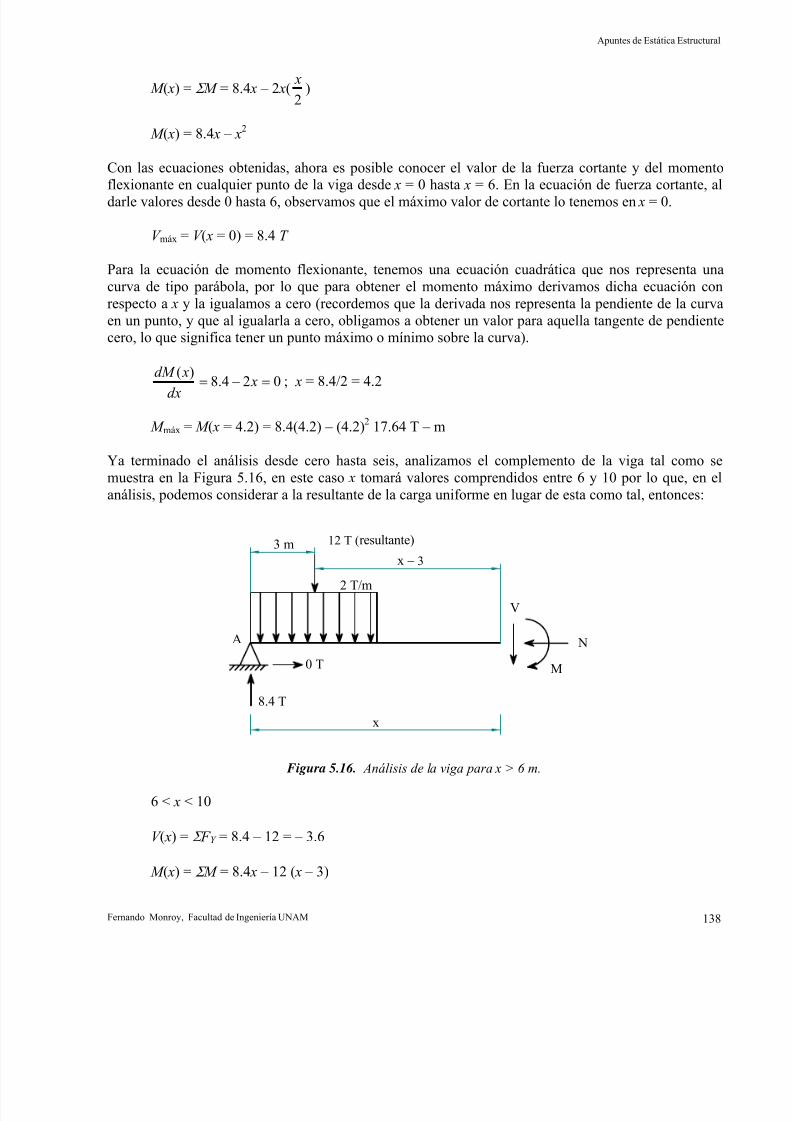
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 145/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 138
M ( x) = Σ M = 8.4 x – 2 x(2
x)
M ( x) = 8.4 x – x2
Con las ecuaciones obtenidas, ahora es posible conocer el valor de la fuerza cortante y del momento
flexionante en cualquier punto de la viga desde x = 0 hasta x = 6. En la ecuación de fuerza cortante, aldarle valores desde 0 hasta 6, observamos que el máximo valor de cortante lo tenemos en x = 0.
V máx = V ( x = 0) = 8.4 T
Para la ecuación de momento flexionante, tenemos una ecuación cuadrática que nos representa unacurva de tipo parábola, por lo que para obtener el momento máximo derivamos dicha ecuación conrespecto a x y la igualamos a cero (recordemos que la derivada nos representa la pendiente de la curvaen un punto, y que al igualarla a cero, obligamos a obtener un valor para aquella tangente de pendientecero, lo que significa tener un punto máximo o mínimo sobre la curva).
028.4)( =−= xdx
xdM ; x = 8.4/2 = 4.2
M máx = M ( x = 4.2) = 8.4(4.2) – (4.2)2 17.64 T – m
Ya terminado el análisis desde cero hasta seis, analizamos el complemento de la viga tal como semuestra en la Figura 5.16, en este caso x tomará valores comprendidos entre 6 y 10 por lo que, en elanálisis, podemos considerar a la resultante de la carga uniforme en lugar de esta como tal, entonces:
A
M
N
2 T/m
263 m
0 T
8.4 T
100 x
V
75x − 3
12 Τ (resultante)
Figura 5.16. Análisis de la viga para x > 6 m.
6 < x < 10
V ( x) = Σ F Y = 8.4 – 12 = – 3.6
M ( x) = Σ M = 8.4 x – 12 ( x – 3)

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 146/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 139
M ( x) = – 3.6 x + 36
Mmáx = M ( x = 6) = 14.4 T−m
5.3.1 Ejemplos
Ejemplo 5.1. Obtención de los diagramas de momento flexionante y fuerza cortante para una vigasujeta a carga uniformemente distribuida (Figura 5.17).
a) Cálculo de reacciones.
Por simetría, las dos reacciones en los apoyos valen ω L/2.
b) Obtención de la fuerza cortante.
x Lω
xV ω −=
2
)(
Si x = 0, V ( x) =2
Lω
Si x = 0)(,2
= xV L
Si x = L, V ( x = L) = −2
Lω
c) Obtención del momento flexionante.
Consideremos una sección a la distancia x de referencia, que en este caso es el apoyo izquierdo. Elequilibro en momentos nos conduce a la siguiente ecuación:
22)(
2 xω
x Lω
x M −=
Si x = 0, M ( x) = 0
Si x = L, M ( x) = 022
22=− Lω Lω
d) Obtención del momento máximo
0=dx
dM(x) 0
2 =−∴ xω
Lω
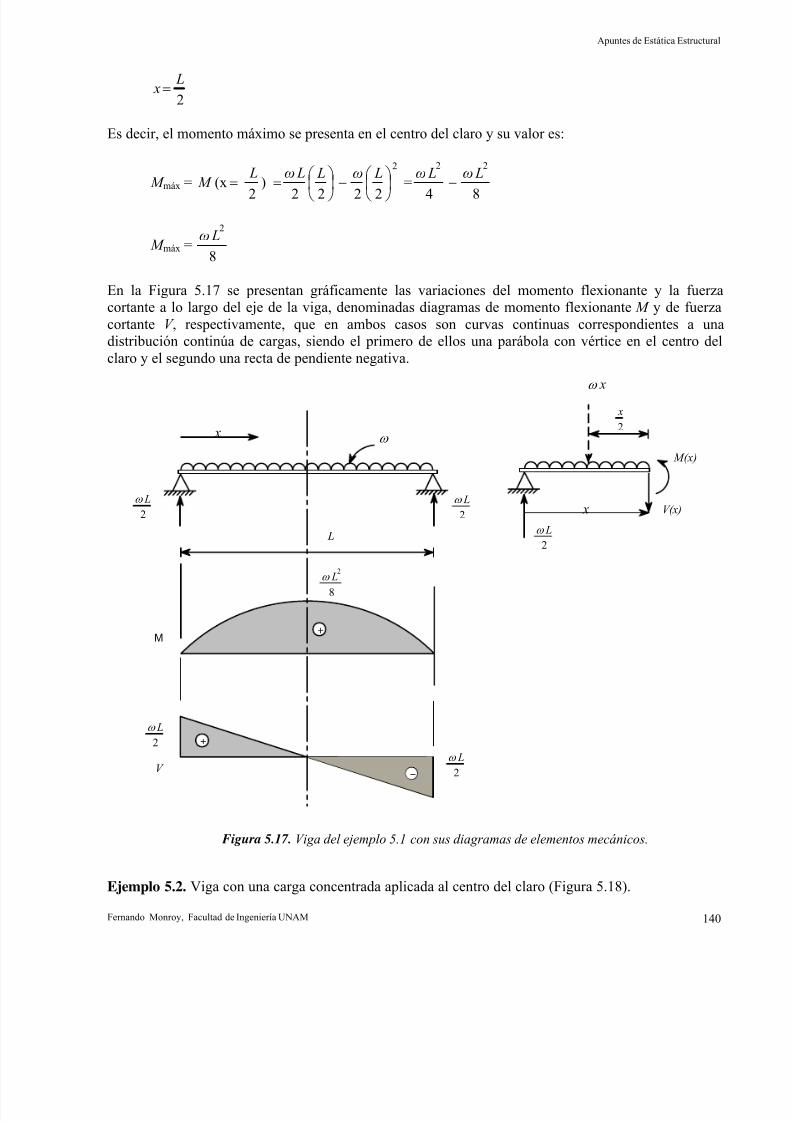
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 147/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 140
2
L x =
Es decir, el momento máximo se presenta en el centro del claro y su valor es:
M máx = )2(x
L
M =
2
2222 ⎟ ⎠
⎞
⎜⎝
⎛
−⎟ ⎠
⎞
⎜⎝
⎛
=
Lω L Lω
= 84
22 Lω Lω
−
M máx =8
2 Lω
En la Figura 5.17 se presentan gráficamente las variaciones del momento flexionante y la fuerzacortante a lo largo del eje de la viga, denominadas diagramas de momento flexionante M y de fuerzacortante V , respectivamente, que en ambos casos son curvas continuas correspondientes a unadistribución continúa de cargas, siendo el primero de ellos una parábola con vértice en el centro delclaro y el segundo una recta de pendiente negativa.
-
L
M +
ω
+
V
x
V(x) x
M(x)
ω x
2 Lω
2 Lω
8
2 Lω
2 Lω
2 Lω
2 Lω
2
x
Figura 5.17. Viga del ejemplo 5.1 con sus diagramas de elementos mecánicos.
Ejemplo 5.2. Viga con una carga concentrada aplicada al centro del claro (Figura 5.18).
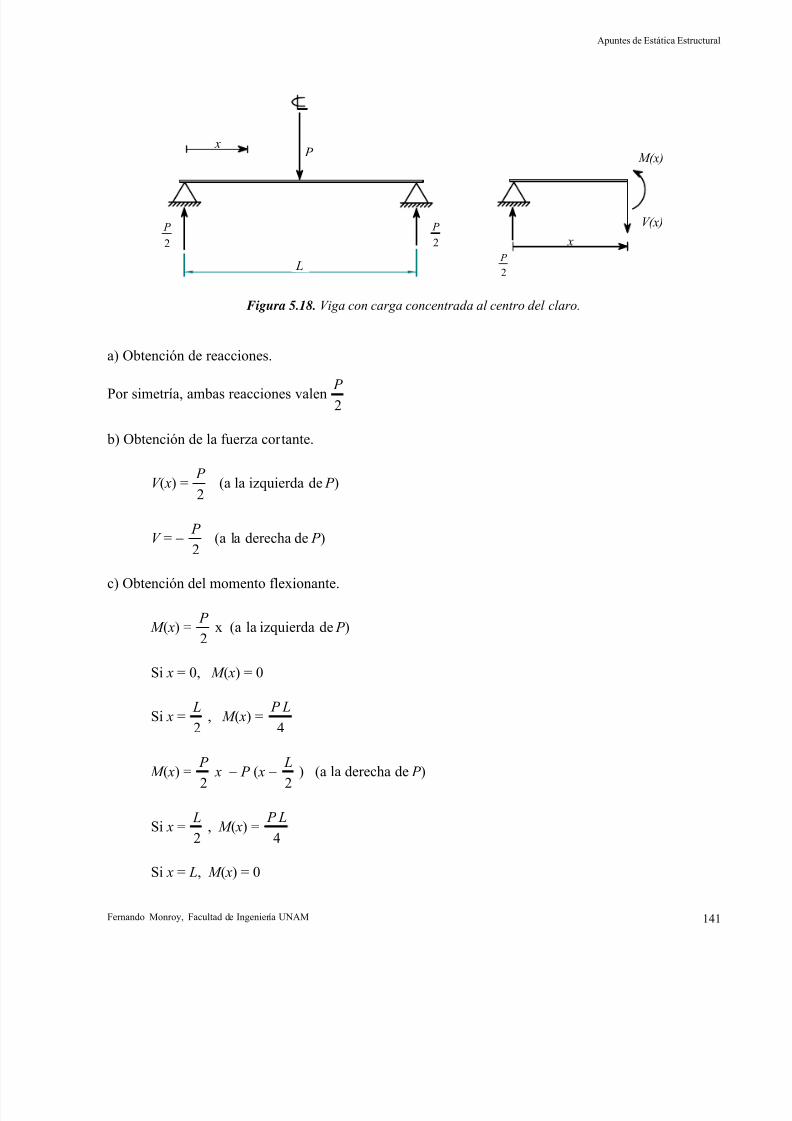
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 148/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 141
P x
V ( x )
M ( x )
x2
P
2
P
2
P 95 L
Figura 5.18. Viga con carga concentrada al centro del claro.
a) Obtención de reacciones.
Por simetría, ambas reacciones valen2
P
b) Obtención de la fuerza cortante.
V ( x) =2
P (a la izquierda de P )
V = − 2
P (a la derecha de P )
c) Obtención del momento flexionante.
M ( x) =2
P x (a la izquierda de P )
Si x = 0, M ( x) = 0
Si x =2
L, M ( x) =
4
L P
M ( x) =2
P x − P ( x −
2
L) (a la derecha de P )
Si x =2
L, M ( x) =
4
L P
Si x = L, M ( x) = 0
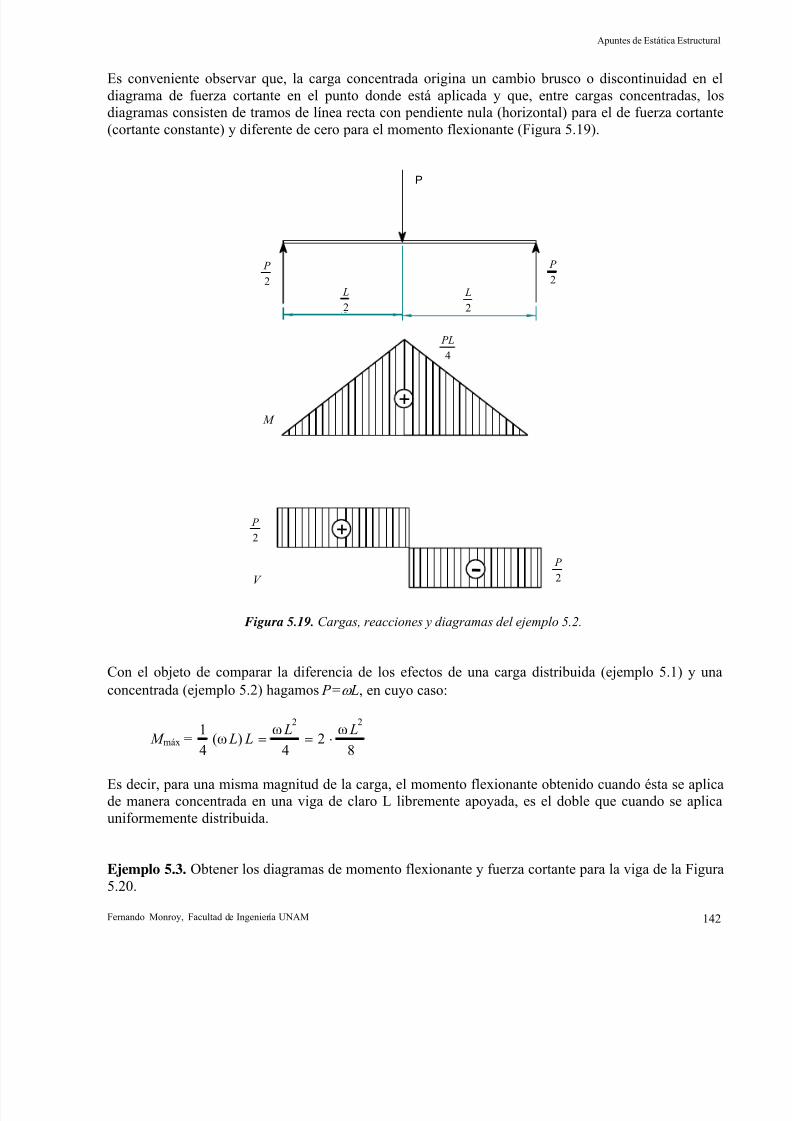
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 149/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 142
Es conveniente observar que, la carga concentrada origina un cambio brusco o discontinuidad en eldiagrama de fuerza cortante en el punto donde está aplicada y que, entre cargas concentradas, losdiagramas consisten de tramos de línea recta con pendiente nula (horizontal) para el de fuerza cortante(cortante constante) y diferente de cero para el momento flexionante (Figura 5.19).
P
V -
+
+
M
45 512 L
2 L
2
P
2 P
4 PL
2 P
2 P
Figura 5.19. Cargas, reacciones y diagramas del ejemplo 5.2.
Con el objeto de comparar la diferencia de los efectos de una carga distribuida (ejemplo 5.1) y unaconcentrada (ejemplo 5.2) hagamos P=ω L, en cuyo caso:
M máx =
8
ω2
4
ω)(ω
4
122
L L L L ⋅==
Es decir, para una misma magnitud de la carga, el momento flexionante obtenido cuando ésta se aplicade manera concentrada en una viga de claro L libremente apoyada, es el doble que cuando se aplicauniformemente distribuida.
Ejemplo 5.3. Obtener los diagramas de momento flexionante y fuerza cortante para la viga de la Figura5.20.
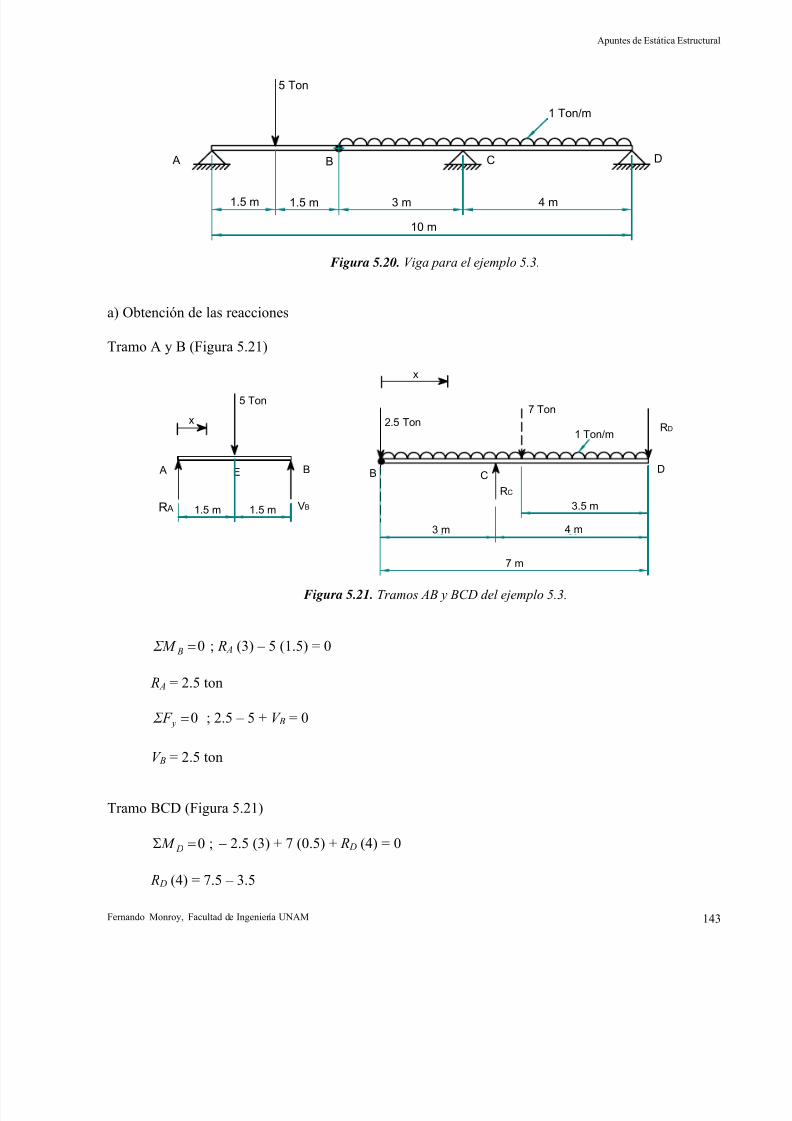
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 150/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 143
D
5 Ton
B
1 Ton/m
A C
23 23 45 61
151
1.5 m 1.5 m 3 m 4 m
10 m
Figura 5.20. Viga para el ejemplo 5.3.
a) Obtención de las reacciones
Tramo A y B (Figura 5.21)
5 Ton
B
VB
A
2.5 Ton
D
7 Ton
B
1 Ton/mRD
x
RA
x
C
RC
E
22 221.5 m 1.5 m 50
45 60
106
3.5 m
4 m3 m
7 m
Figura 5.21. Tramos AB y BCD del ejemplo 5.3.
0= B Σ M ; R A (3) – 5 (1.5) = 0
R A = 2.5 ton
0= y Σ F ; 2.5 – 5 + V B = 0
V B = 2.5 ton
Tramo BCD (Figura 5.21)
;0=Σ D M − 2.5 (3) + 7 (0.5) + R D (4) = 0
R D (4) = 7.5 – 3.5
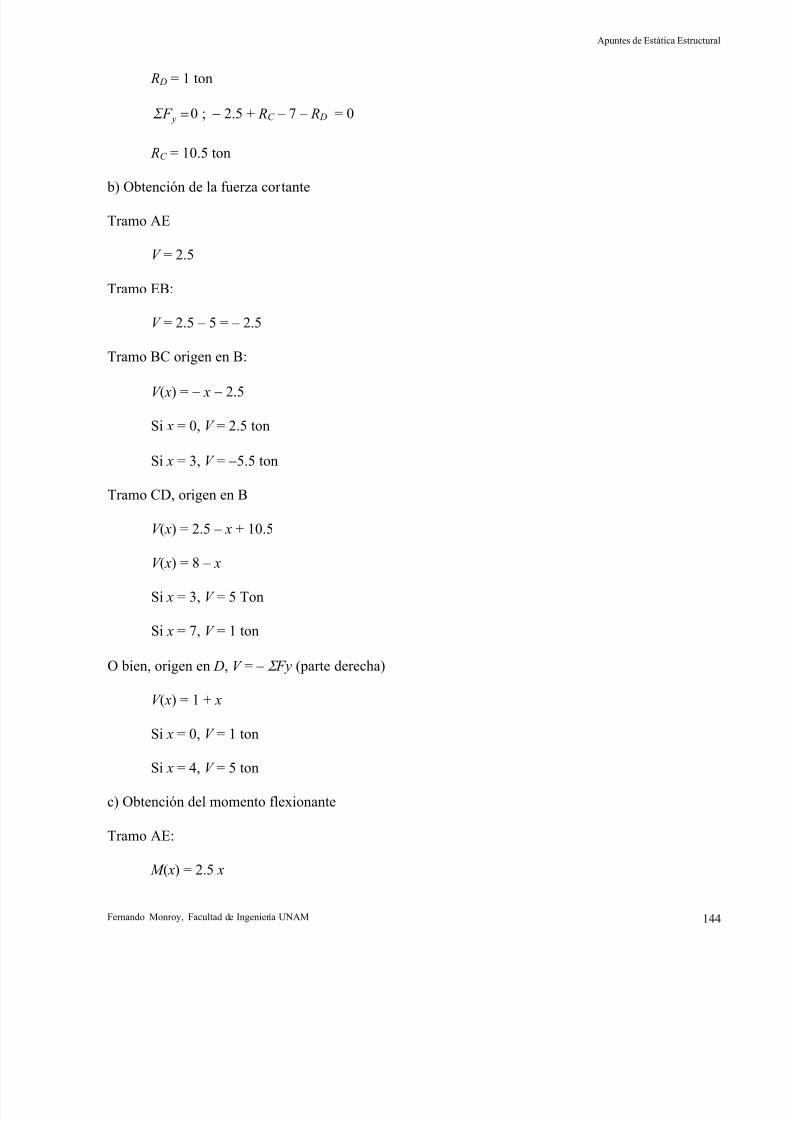
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 151/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 144
R D = 1 ton
;0= y Σ F − 2.5 + RC – 7 – R D = 0
RC = 10.5 ton
b) Obtención de la fuerza cortante
Tramo AE
V = 2.5
Tramo EB:
V = 2.5 – 5 = – 2.5
Tramo BC origen en B:
V ( x) = − x − 2.5
Si x = 0, V = 2.5 ton
Si x = 3, V = −5.5 ton
Tramo CD, origen en B
V ( x) = 2.5 – x + 10.5
V ( x) = 8 – x
Si x = 3, V = 5 Ton
Si x = 7, V = 1 ton
O bien, origen en D, V = – Σ Fy (parte derecha)
V ( x) = 1 + x
Si x = 0, V = 1 ton
Si x = 4, V = 5 ton
c) Obtención del momento flexionante
Tramo AE:
M ( x) = 2.5 x
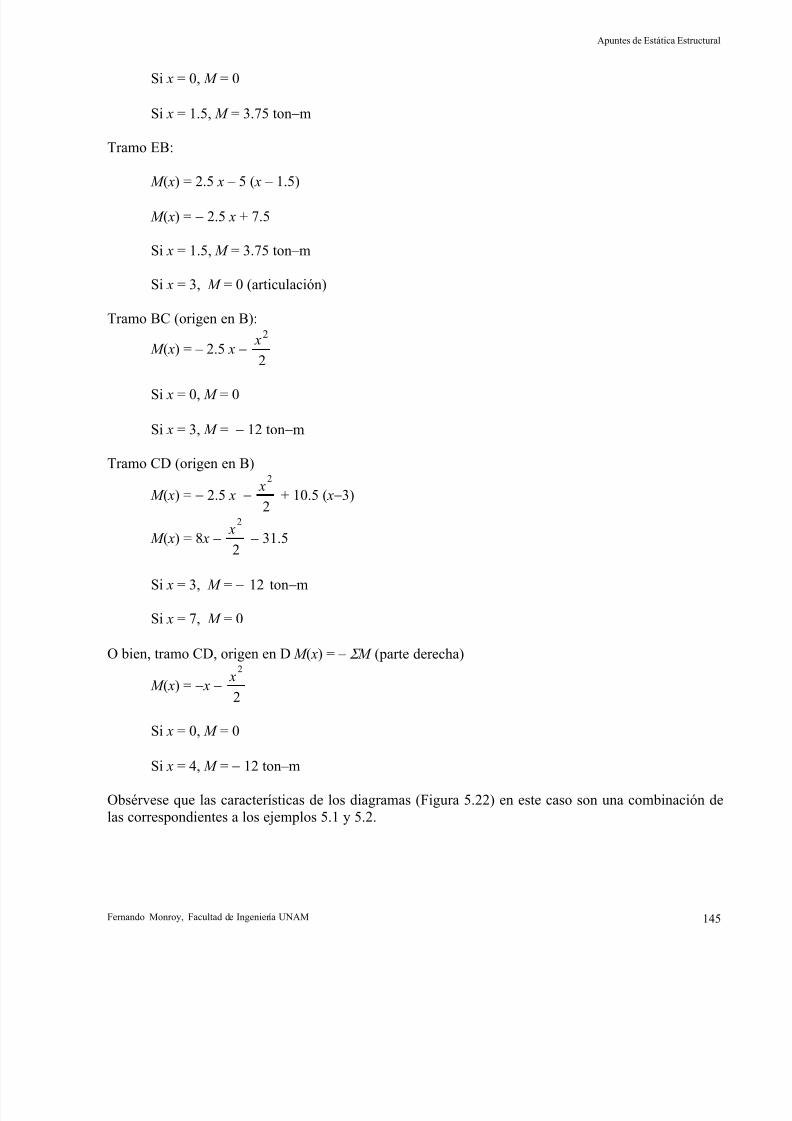
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 152/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 145
Si x = 0, M = 0
Si x = 1.5, M = 3.75 ton−m
Tramo EB:
M ( x) = 2.5 x – 5 ( x – 1.5)
M ( x) = − 2.5 x + 7.5
Si x = 1.5, M = 3.75 ton–m
Si x = 3, M = 0 (articulación)
Tramo BC (origen en B):
M ( x) = – 2.5 x − 2
2 x
Si x = 0, M = 0
Si x = 3, M = − 12 ton−m
Tramo CD (origen en B)
M ( x) = − 2.5 x − 2
2 x
+ 10.5 ( x−3)
M ( x) = 8 x − 2
2 x
− 31.5
Si x = 3, M = − 12 ton−m
Si x = 7, M = 0
O bien, tramo CD, origen en D M ( x) = – Σ M (parte derecha)
M ( x) = − x − 2
2 x
Si x = 0, M = 0
Si x = 4, M = − 12 ton–m
Obsérvese que las características de los diagramas (Figura 5.22) en este caso son una combinación delas correspondientes a los ejemplos 5.1 y 5.2.
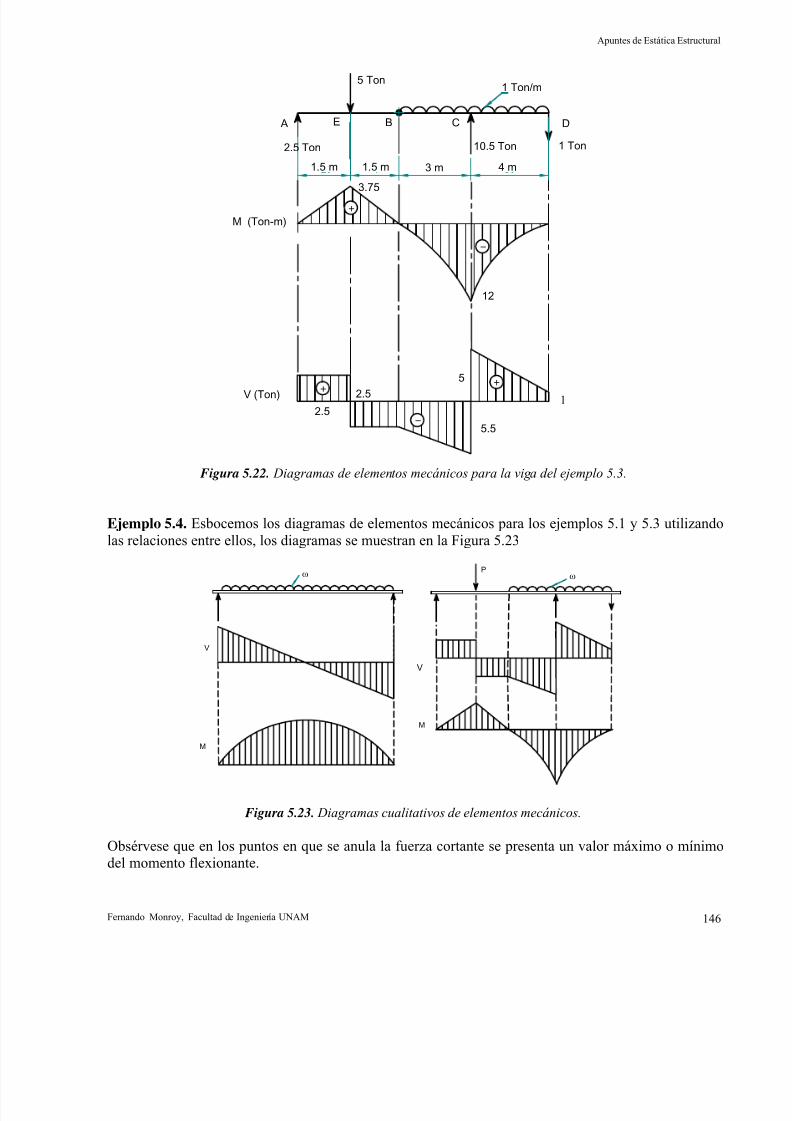
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 153/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 146
A
5 Ton
M (Ton-m)
V (Ton)
B C D
1 Ton/m
1 Ton2.5 Ton 10.5 Ton
3.75
2.5
2.5
5.5
5
1
12
E
-
-
20 19 28 301.5 m 1.5 m 3 m 4 m
+
++
Figura 5.22. Diagramas de elementos mecánicos para la viga del ejemplo 5.3.
Ejemplo 5.4. Esbocemos los diagramas de elementos mecánicos para los ejemplos 5.1 y 5.3 utilizandolas relaciones entre ellos, los diagramas se muestran en la Figura 5.23
V
M
ω
V
ωP
M
Figura 5.23. Diagramas cualitativos de elementos mecánicos.
Obsérvese que en los puntos en que se anula la fuerza cortante se presenta un valor máximo o mínimodel momento flexionante.
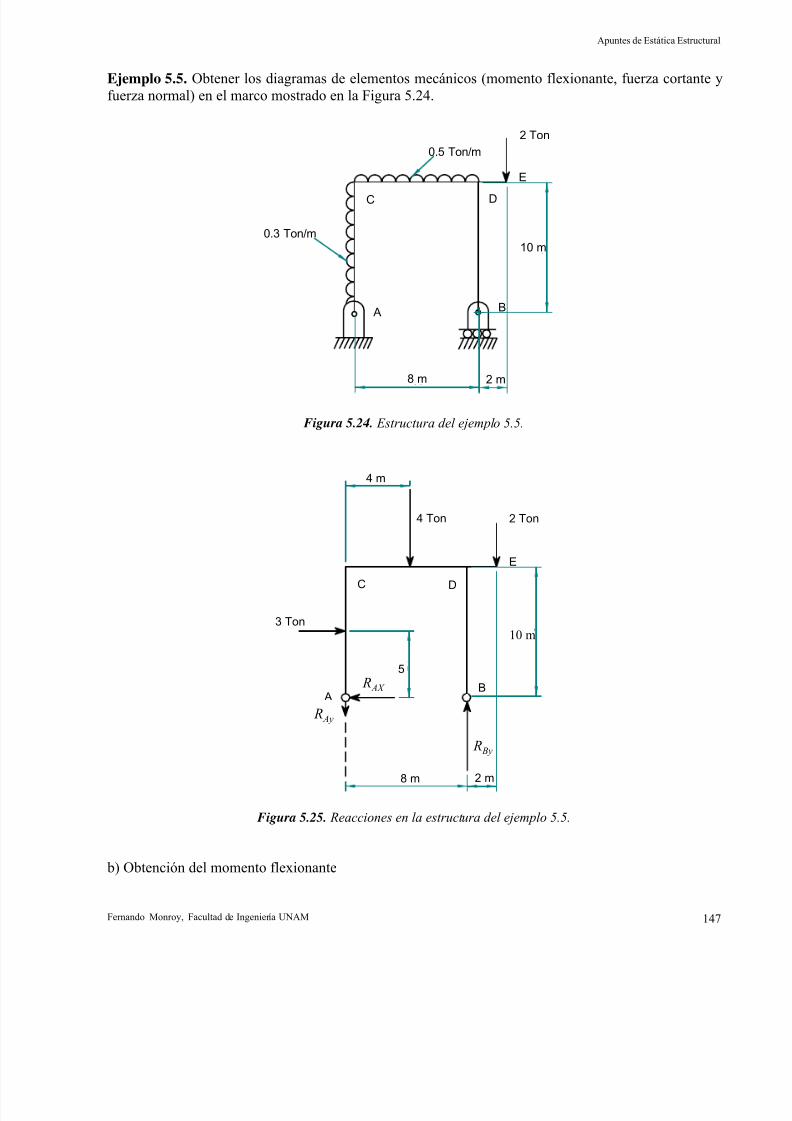
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 154/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 147
Ejemplo 5.5. Obtener los diagramas de elementos mecánicos (momento flexionante, fuerza cortante yfuerza normal) en el marco mostrado en la Figura 5.24.
0.3 Ton/m
2 Ton
0.5 Ton/m
A B
C D
E
4 6 10 m
44 102 m8 m
Figura 5.24. Estructura del ejemplo 5.5.
3 Ton
2 Ton
A B
C D E
4 Ton
23
4 6
2 4
44 11
4 m
10 m
5
8 m 2 m
.
Ay R
AX R
By R
Figura 5.25. Reacciones en la estructura del ejemplo 5.5.
b) Obtención del momento flexionante
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 155/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 148
Tramo AC (origen en A)
M = 3 y − 0.3 y ⎟ ⎠
⎞⎜⎝
⎛ 2
y
M = 3 y − 0.15 y2
Si y = 0, M = 0
Si y = 10, M = 15 ton−m
0=dy
dM ; 3 – 0.3 y = 0
y = 10
M máx para y = 10
Tramo CD (origen en C)
M = 3(10) − 0.375 x − 3(5) − 0.5 x ⎟ ⎠
⎞⎜⎝
⎛ 2
x
M = 15 – 0.375 x − 0.25 x2
Si x = 0, M = 15 ton−m
Si x = 8, M = − 4 ton−m
Tramo ED (origen en E)
M = − 2 x
Si x = 0, M = 0
Si x = 2, M = − 4 ton−m
Tramo BD (origen en B)
M = 0
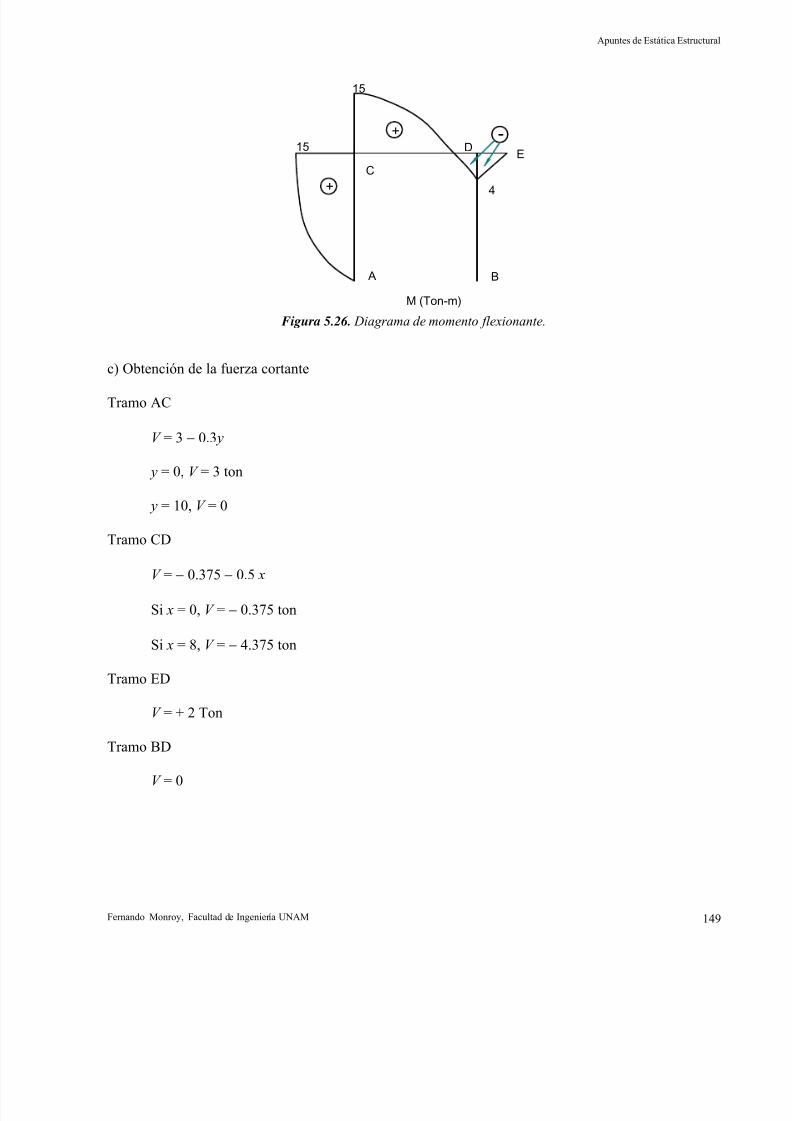
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 156/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 149
A
15
B
C
D E
+
+
15
-
4
M (Ton-m)
Figura 5.26. Diagrama de momento flexionante.
c) Obtención de la fuerza cortanteTramo AC
V = 3 − 0.3 y
y = 0, V = 3 ton
y = 10, V = 0
Tramo CD
V = − 0.375 − 0.5 x
Si x = 0, V = − 0.375 ton
Si x = 8, V = − 4.375 ton
Tramo ED
V = + 2 Ton
Tramo BDV = 0
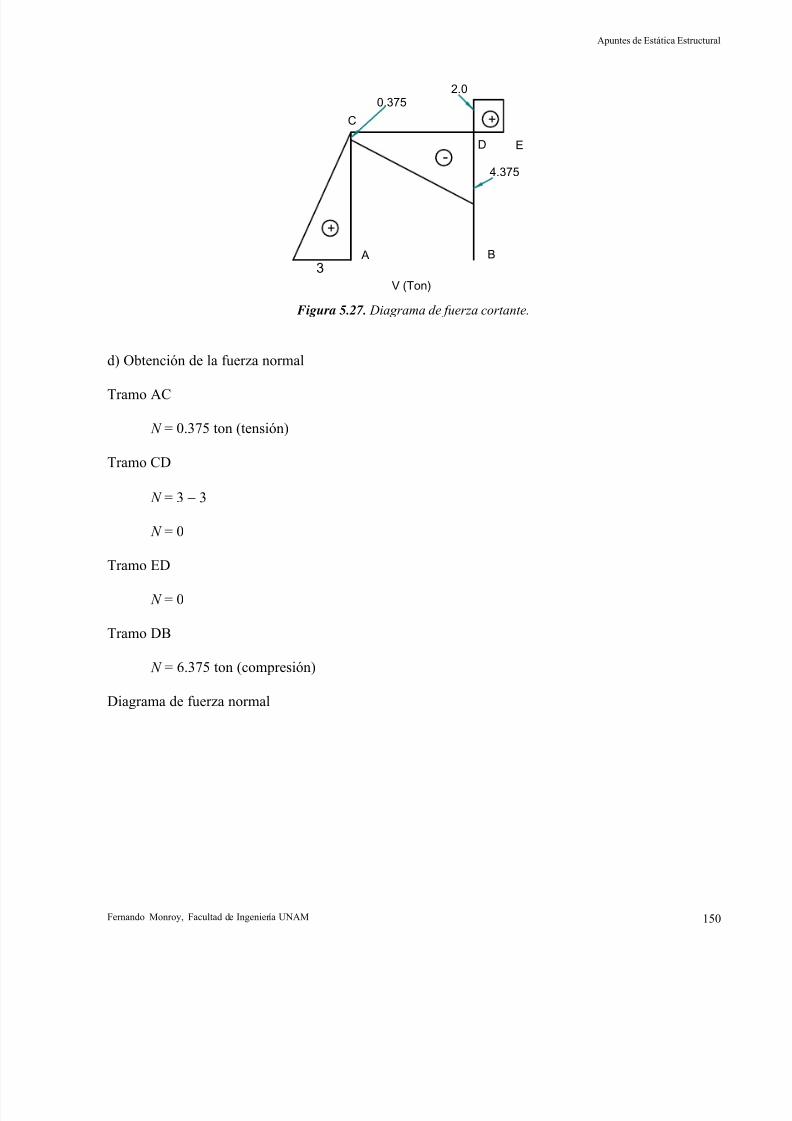
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 157/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 150
A
0.375
B
C
D E
+
+
-
V (Ton)
3
4.375
2.0
Figura 5.27. Diagrama de fuerza cortante.
d) Obtención de la fuerza normal
Tramo AC
N = 0.375 ton (tensión)
Tramo CD
N = 3 − 3
N = 0
Tramo ED
N = 0
Tramo DB
N = 6.375 ton (compresión)
Diagrama de fuerza normal
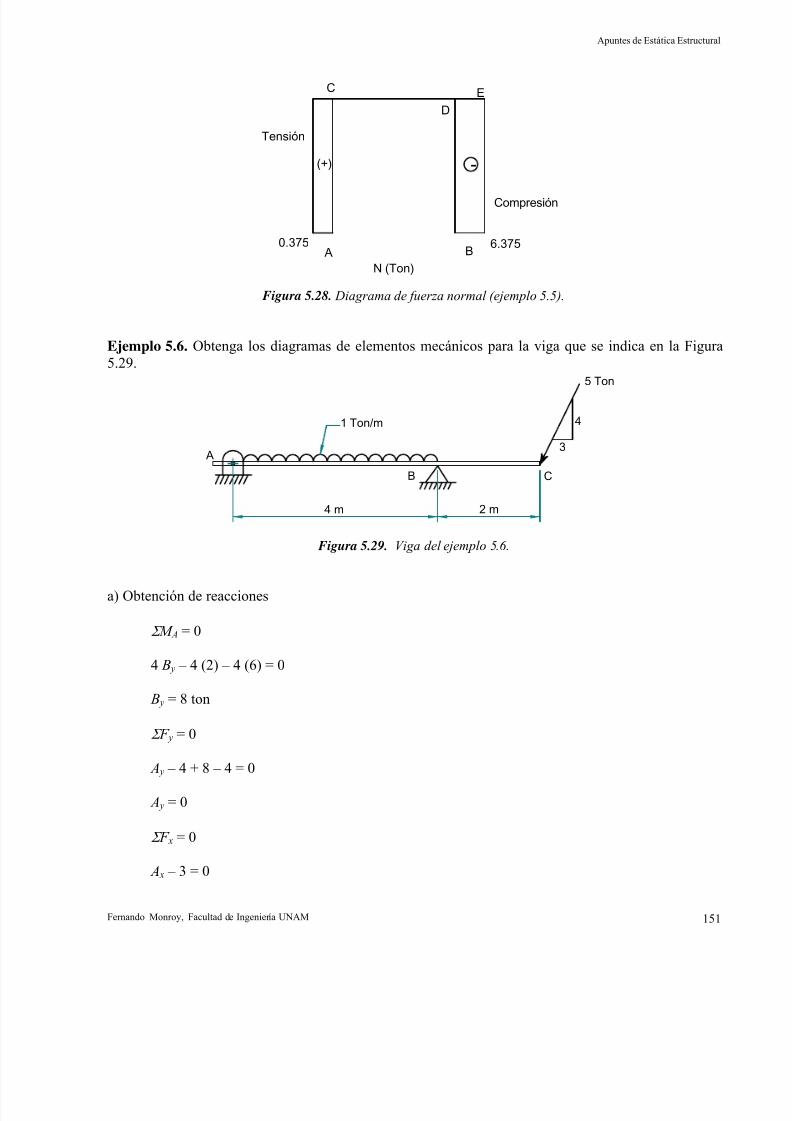
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 158/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 151
A0.375
B
C
D
E
N (Ton)
Compresión
6.375
Tensión
(+) -
Figura 5.28. Diagrama de fuerza normal (ejemplo 5.5).
Ejemplo 5.6. Obtenga los diagramas de elementos mecánicos para la viga que se indica en la Figura5.29.
A
1 Ton/m
B C
3
4
5 Ton
37744 m 2 m
Figura 5.29. Viga del ejemplo 5.6.
a) Obtención de reacciones
Σ M A = 0
4 B y – 4 (2) – 4 (6) = 0
B y = 8 ton
Σ F y = 0
A y – 4 + 8 – 4 = 0
A y = 0
Σ F x = 0
A x – 3 = 0

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 159/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 152
A x = 3 ton
b) Obtención del momento flexionante
Tramo AB
22)(
2
x x x x M −=⎟ ⎠ ⎞⎜
⎝ ⎛ −=
Si x = 0 M = 0
Si x = 4 M = − 8 ton−m
Tramo BC, origen en C
M ( x) = − 4 x 0 < x < 2
Si x = 0 M = 0
Si x = 2 M = − 8 ton−m
(c) Obtención de la fuerza cortante
Tramo AB, origen en A
V ( x) = − x 0 < x < 4
Si x = 0 V = 0
Si x = 4 V = − 4
Tramo BC
V = 4 ton
d) Obtención de la fuerza normal
N = − 3 ton para 0 < x < 6
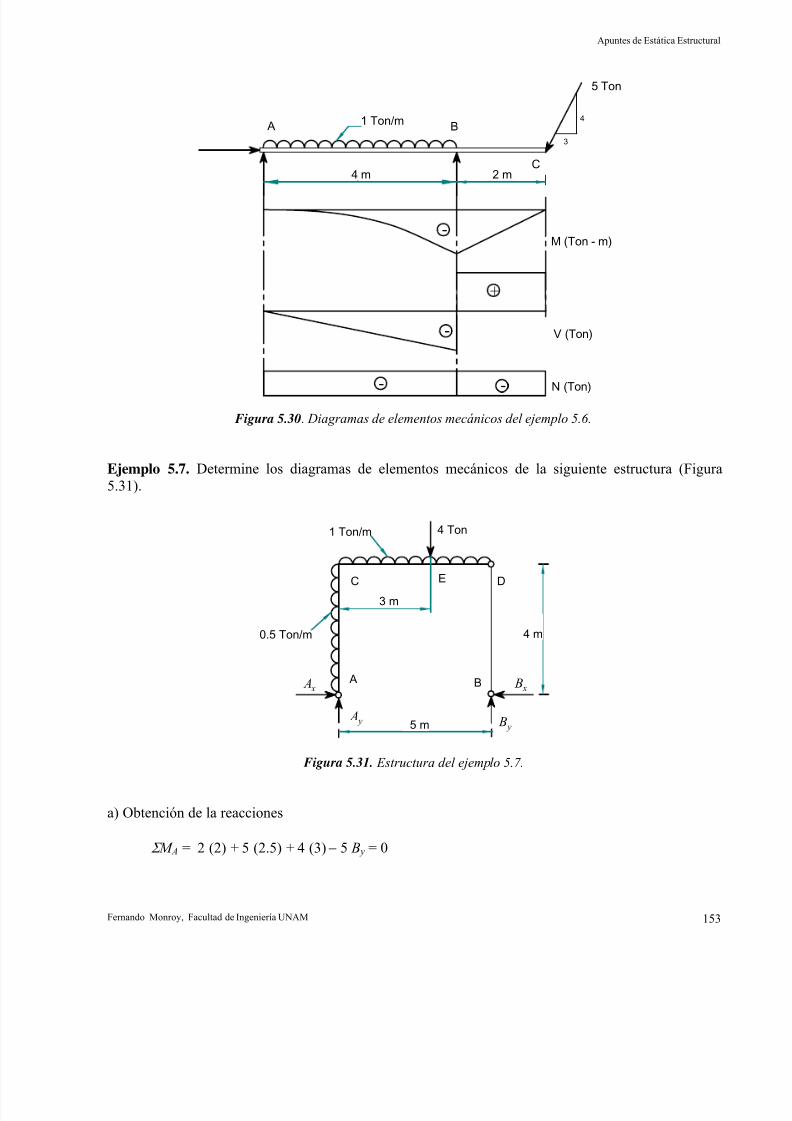
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 160/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 153
5 Ton
BA
C
3
4
-
+
M (Ton - m)
V (Ton)
N (Ton)
1 Ton/m
-
0,07 0,034 m 2 m
-
-
Figura 5.30. Diagramas de elementos mecánicos del ejemplo 5.6.
Ejemplo 5.7. Determine los diagramas de elementos mecánicos de la siguiente estructura (Figura5.31).
0.5 Ton/m
4 Ton
A B
C DE
1 Ton/m
0.03
0 ,
1
4 m
0,1
3 m
5 m
x A
y A
x B
y B
Figura 5.31. Estructura del ejemplo 5.7.
a) Obtención de la reacciones
Σ M A = 2 (2) + 5 (2.5) + 4 (3) − 5 B y = 0

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 161/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 154
B y = 7.55
125.124=
++ton
B y = 5.7 ton
Σ F y = − A y + 5.7 − 5 − 4 = 0
A y = 3.3 ton
Σ M D = 0; (tramo BD, Figura 5.32)
+ B x (4)= 0
B x = 0
Σ F x = 2 + A x − B x = 0 (Toda la estructura)
A x = 2 + B x
B x = 2 ton
5.7 Ton
y D
x D
x B
Figura 5.32. D.C.L. tramo DB.
b) Obtención del momento flexionante
Tramo AC
M ( y) = 2 y − 0.25 y2 0 < y < 4
Si y = 0 M = 0
Si y = 4 M = 4 ton−m
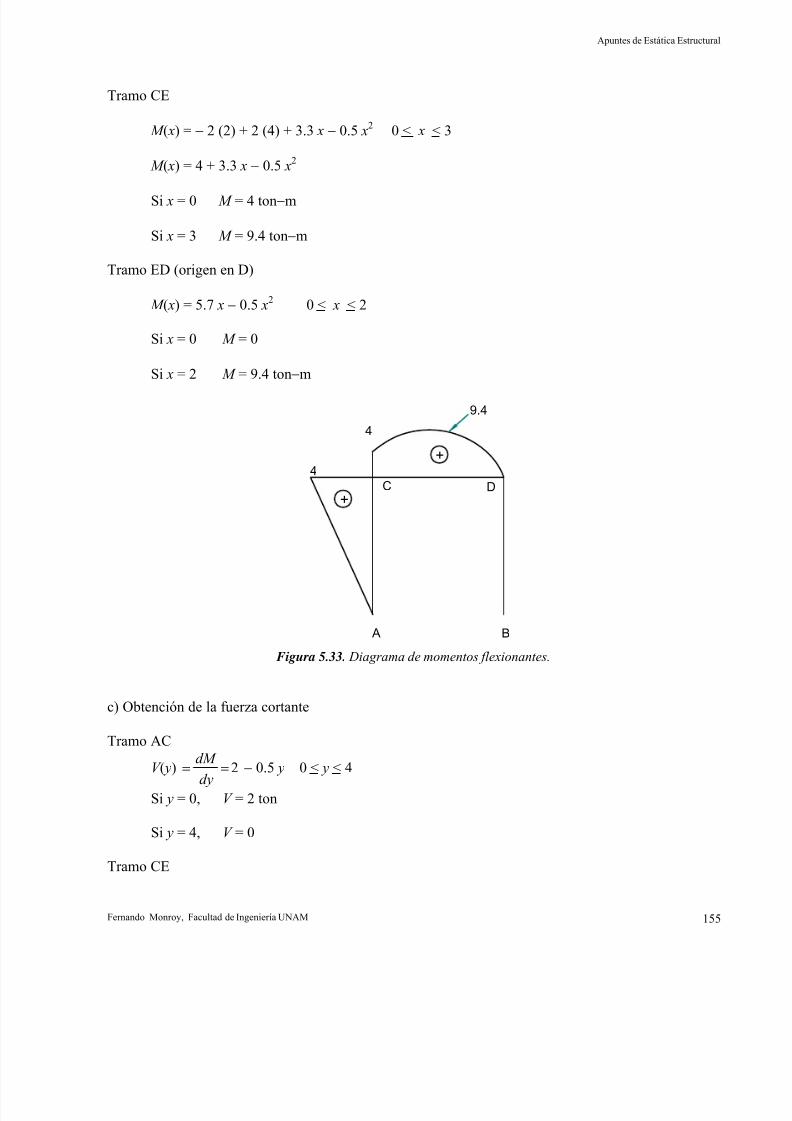
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 162/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 155
Tramo CE
M ( x) = − 2 (2) + 2 (4) + 3.3 x − 0.5 x2 0 < x < 3
M ( x) = 4 + 3.3 x − 0.5 x2
Si x = 0 M = 4 ton−m
Si x = 3 M = 9.4 ton−m
Tramo ED (origen en D)
M ( x) = 5.7 x − 0.5 x2 0 < x < 2
Si x = 0 M = 0
Si x = 2 M = 9.4 ton−m
A
4
B
C D
+
+
4
9.4
Figura 5.33. Diagrama de momentos flexionantes.
c) Obtención de la fuerza cortante
Tramo AC
V ( y) 2==dy
dM − 0.5 y 0 < y < 4
Si y = 0, V = 2 ton
Si y = 4, V = 0
Tramo CE
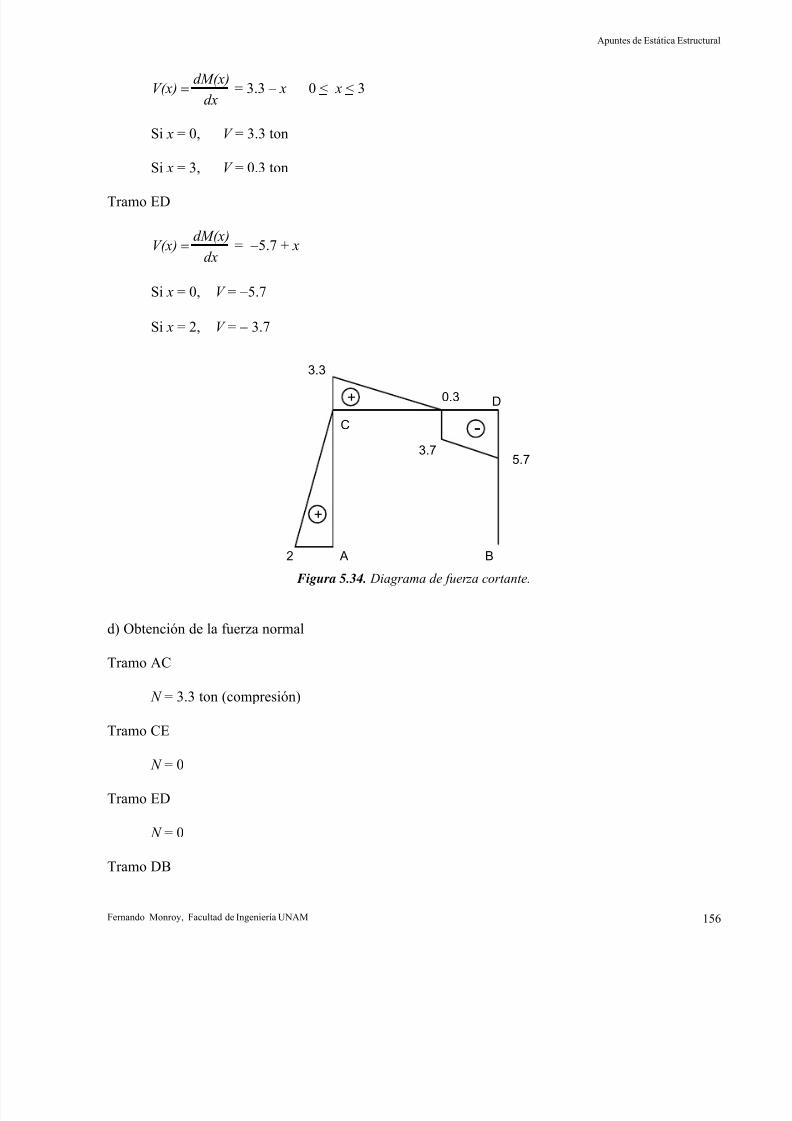
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 163/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 156
dx
dM(x)V(x) = = 3.3 – x 0 < x < 3
Si x = 0, V = 3.3 ton
Si x = 3, V = 0.3 ton
Tramo ED
dx
dM(x)V(x) = = −5.7 + x
Si x = 0, V = −5.7
Si x = 2, V = − 3.7
A2 B
C
D
3.3
+
+
-
0.3
3.7 5.7
Figura 5.34. Diagrama de fuerza cortante.
d) Obtención de la fuerza normal
Tramo AC
N = 3.3 ton (compresión)
Tramo CE
N = 0
Tramo ED
N = 0
Tramo DB
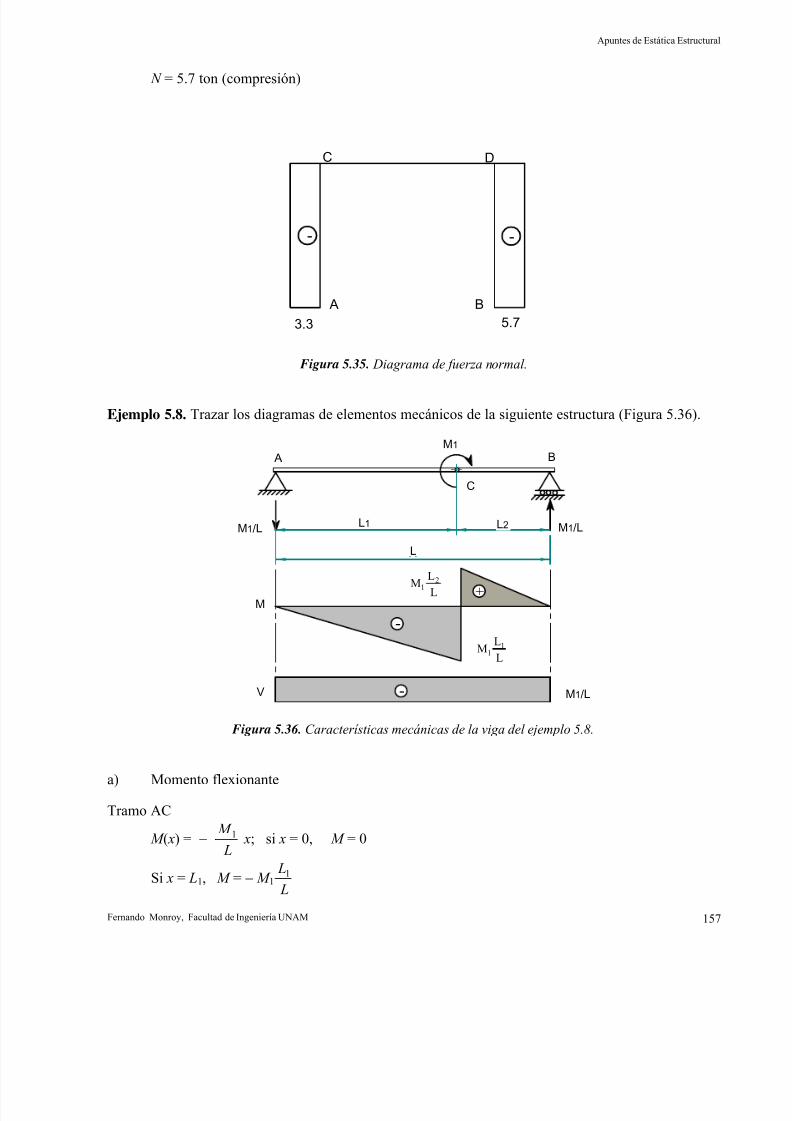
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 164/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 157
N = 5.7 ton (compresión)
-
A B
C D
3.3 5.7
-
Figura 5.35. Diagrama de fuerza normal.
Ejemplo 5.8. Trazar los diagramas de elementos mecánicos de la siguiente estructura (Figura 5.36).
BA
M1/L
C
M1
M1/L
M
V M1/L
-
+
-
L
LM 1
1
L
LM 2
1
99L
3465L1 L2
Figura 5.36. Características mecánicas de la viga del ejemplo 5.8.
a) Momento flexionante
Tramo AC
M ( x) = − L
M 1 x; si x = 0, M = 0
Si x = L1, M = − M 1 L
L1
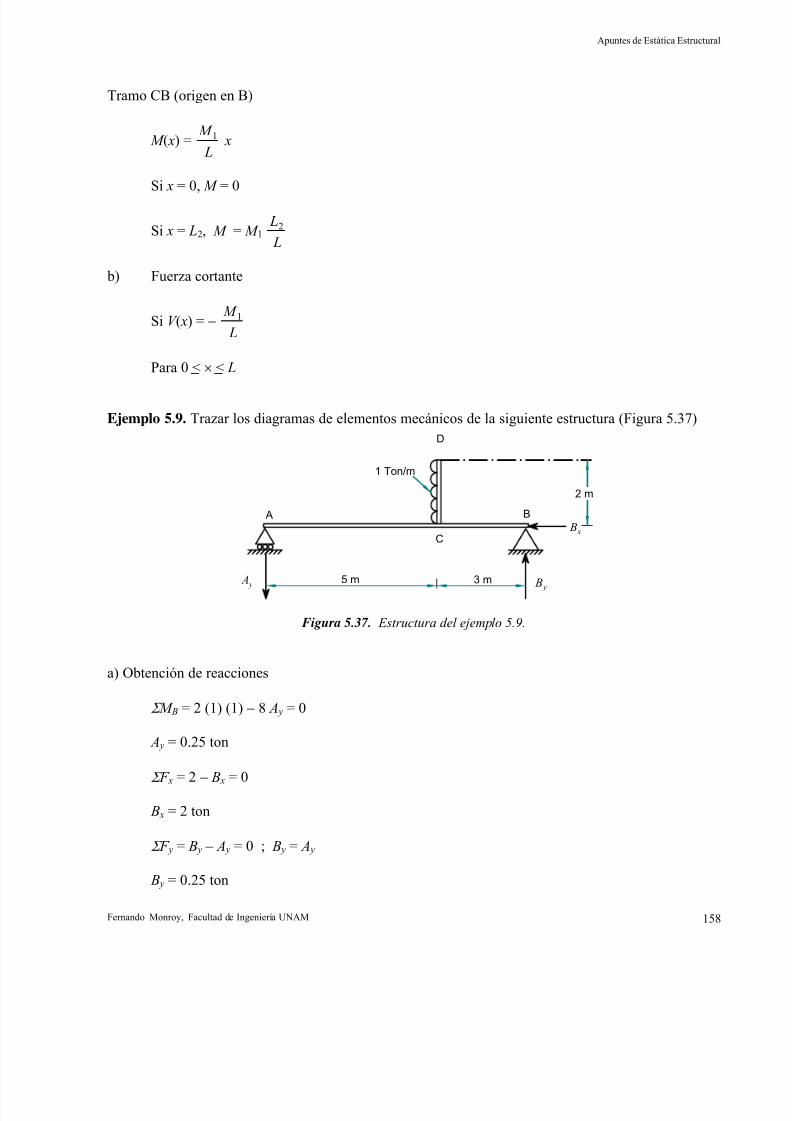
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 165/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 158
Tramo CB (origen en B)
M ( x) = L
M 1 x
Si x = 0, M = 0
Si x = L2, M = M 1 L
L2
b) Fuerza cortante
Si V ( x) = − L
M 1
Para 0 < × < L
Ejemplo 5.9. Trazar los diagramas de elementos mecánicos de la siguiente estructura (Figura 5.37)
BA
C
1 Ton/m
0,07 0,033 m
0,03
5 m
2 m
D
x B
y B y A
Figura 5.37. Estructura del ejemplo 5.9.
a) Obtención de reacciones
Σ M B = 2 (1) (1) − 8 A y = 0
A y = 0.25 ton
Σ F x = 2 − B x = 0
B x = 2 ton
Σ F y = B y – A y = 0 ; B y = A y
B y = 0.25 ton
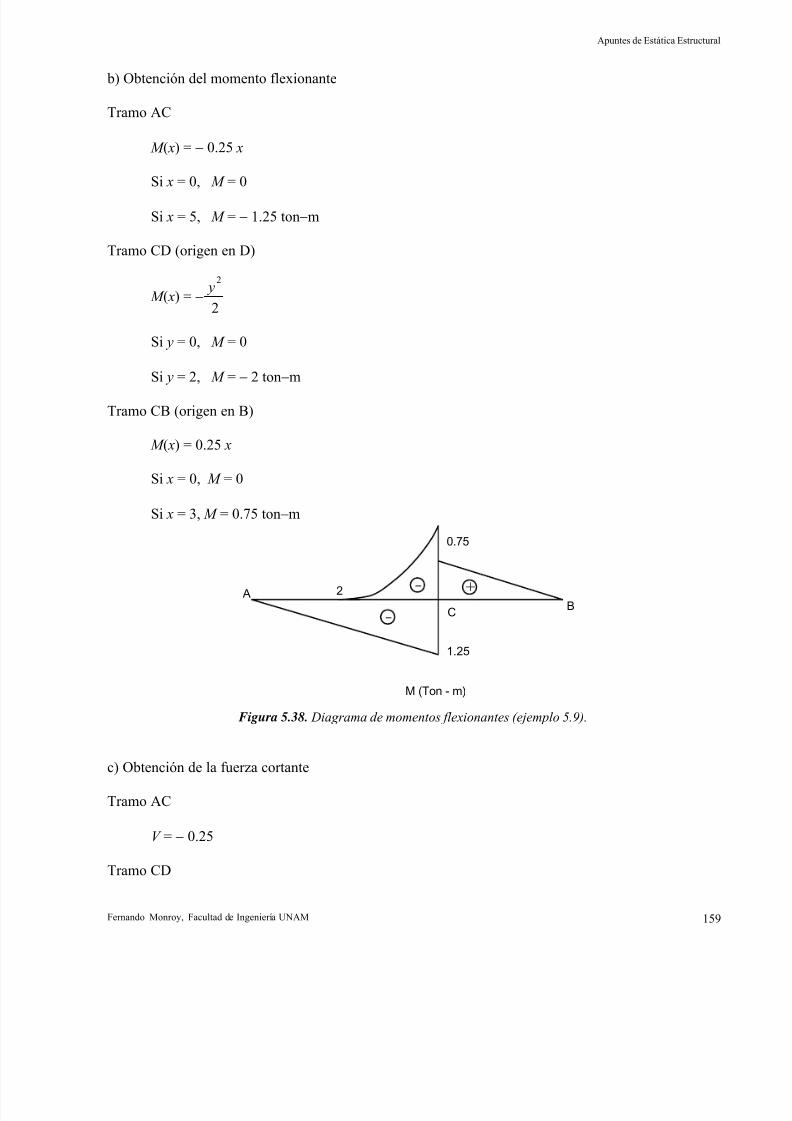
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 166/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 159
b) Obtención del momento flexionante
Tramo AC
M ( x) = − 0.25 x
Si x = 0, M = 0
Si x = 5, M = − 1.25 ton−m
Tramo CD (origen en D)
M ( x) = −2
2 y
Si y = 0, M = 0
Si y = 2, M = − 2 ton−m
Tramo CB (origen en B)
M ( x) = 0.25 x
Si x = 0, M = 0
Si x = 3, M = 0.75 ton−m
2A
-
+
0.75
1.25
C B
-
M (Ton - m)
Figura 5.38. Diagrama de momentos flexionantes (ejemplo 5.9).
c) Obtención de la fuerza cortante
Tramo AC
V = − 0.25
Tramo CD
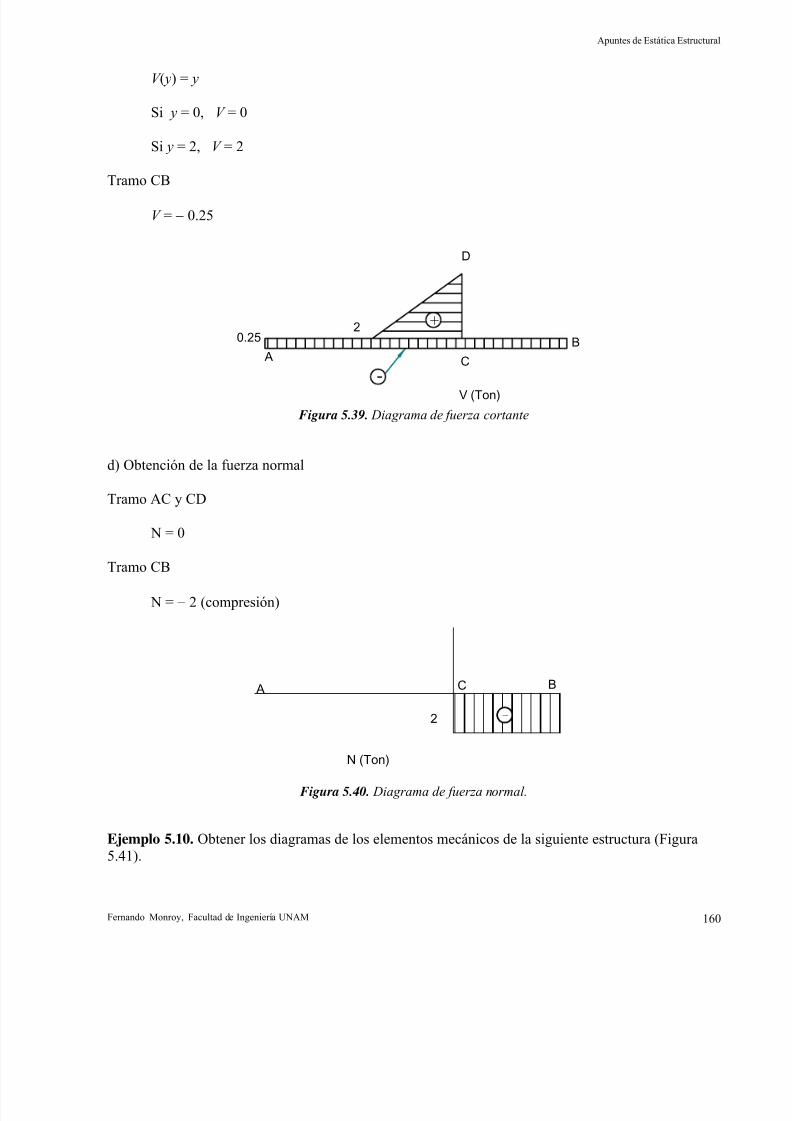
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 167/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 160
V ( y) = y
Si y = 0, V = 0
Si y = 2, V = 2
Tramo CBV = − 0.25
2
A
-
+0.25
C
B
V (Ton)
D
Figura 5.39. Diagrama de fuerza cortante
d) Obtención de la fuerza normal
Tramo AC y CD
N = 0
Tramo CB
N = − 2 (compresión)
2
A C B
N (Ton)
−
Figura 5.40. Diagrama de fuerza normal.
Ejemplo 5.10. Obtener los diagramas de los elementos mecánicos de la siguiente estructura (Figura5.41).
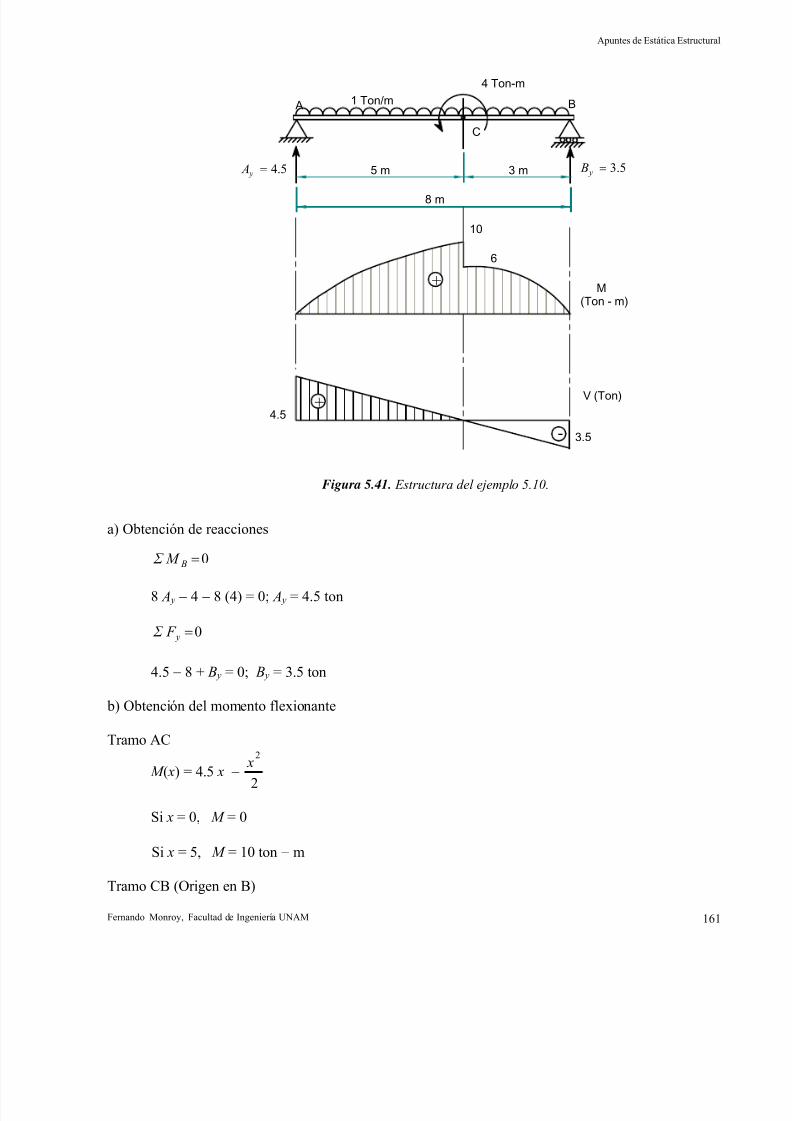
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 168/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 161
BA
C
4 Ton-m
M(Ton - m)
V (Ton)
4.5
+
3.5
1 Ton/m
10
6
+
-
393 m605 m
998 m
5.4= y A 5.3= y B
Figura 5.41. Estructura del ejemplo 5.10.
a) Obtención de reacciones
0= B M Σ
8 A y − 4 − 8 (4) = 0; A y = 4.5 ton
0= y F Σ
4.5 − 8 + B y = 0; B y = 3.5 ton
b) Obtención del momento flexionante
Tramo AC
M ( x) = 4.5 x − 2
2 x
Si x = 0, M = 0
Si x = 5, M = 10 ton − m
Tramo CB (Origen en B)
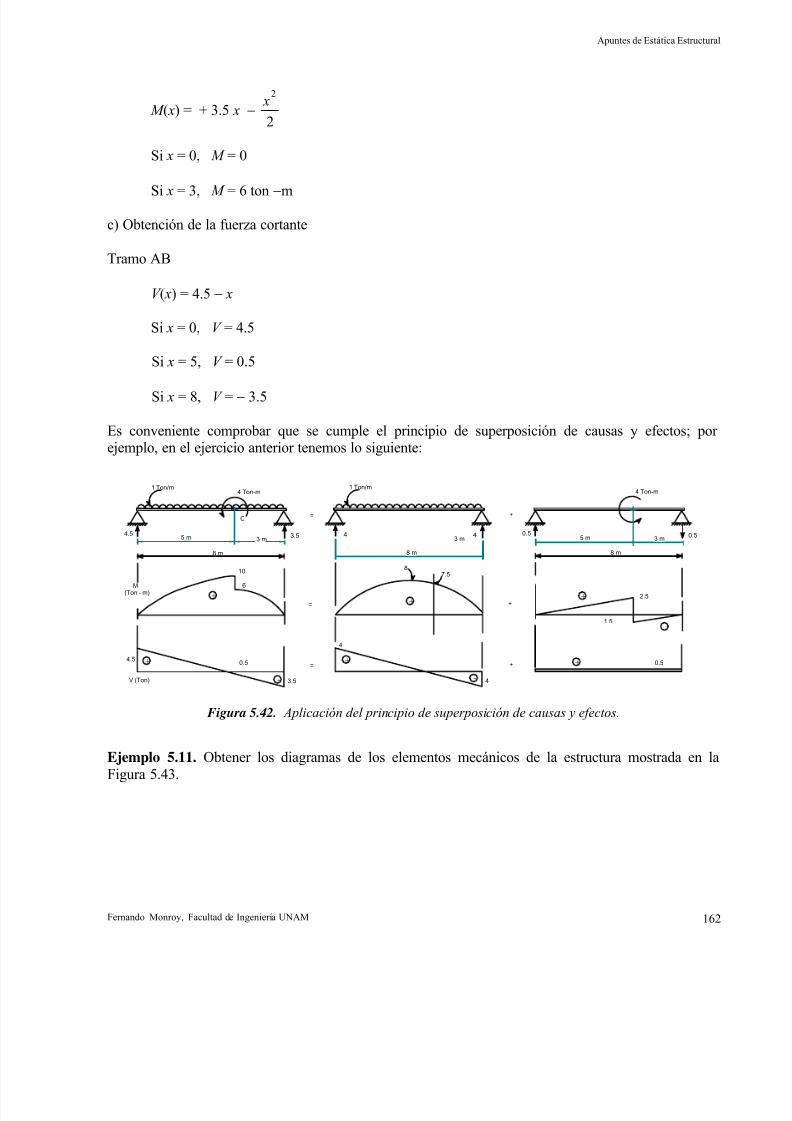
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 169/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 162
M ( x) = + 3.5 x − 2
2 x
Si x = 0, M = 0
Si x = 3, M = 6 ton −m
c) Obtención de la fuerza cortante
Tramo AB
V ( x) = 4.5 − x
Si x = 0, V = 4.5
Si x = 5, V = 0.5
Si x = 8, V = − 3.5
Es conveniente comprobar que se cumple el principio de superposición de causas y efectos; porejemplo, en el ejercicio anterior tenemos lo siguiente:
43 m
4
4
1 Ton/m
87.5
4
+
+
+
0.5
4 Ton-m
0.5
8 m
1.5
2.5
0.5
=
=
=
4.5
C
4 Ton-m
M(Ton - m)
0.5
8 m
4.5
3.5
1 Ton/m
10
6
3.5
V (Ton)
+
-
+
+
+
-
+
-
+
66 345 m 3 m
998 m
343 m665 m
Figura 5.42. Aplicación del principio de superposición de causas y efectos.
Ejemplo 5.11. Obtener los diagramas de los elementos mecánicos de la estructura mostrada en laFigura 5.43.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 170/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 163
2 Ton/m
16/3
4 Ton
-
-
M (Ton-m)
V Ton
4
16/3
b)
y=f(x)M(x)
V(x)
a)
y
0,02
x
x/32
xy
0,01 4 m
Figura 5.43. Viga en voladizo con carga de variación lineal.
Con relación a la Figura 5.43 tenemos que:
24
y x= ;
2
x y =
por lo tanto
x P(x)2
1−=
Con respecto a la Figura 5.43a), la resultante xy/2 actuando en el centroide del área bajo la función decarga a la distancia x/3 (Figura 5.43a), las funciones de elementos mecánicos resultan
1234
32 x x x
M(x) −
=−=
Si x = 0, M = 0
Si x = 4, M =3
16−ton−m
4
2 x
V(x) −=
Si x = 0, V = 0
Si x = 4, V = − 4 ton
Ejemplo 5.12. Obtener los diagramas de los elementos mecánicos de la estructura mostrada en laFigura 5.44.
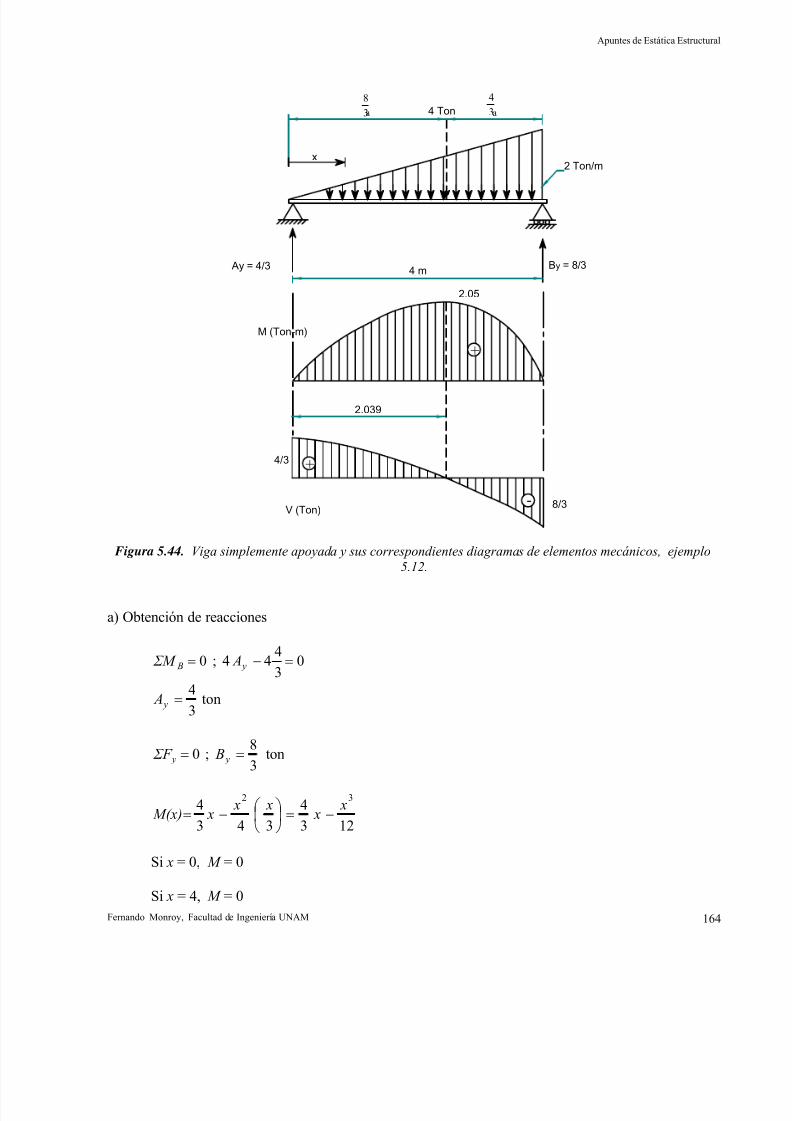
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 171/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 164
By = 8/3
4/3
8/3
2.05
4 Ton
x2 Ton/m
Ay = 4/3
V (Ton)
M (Ton-m)
+
+
-
994 m
3862 a a
612.039
38
34
Figura 5.44. Viga simplemente apoyada y sus correspondientes diagramas de elementos mecánicos, ejemplo
5.12.
a) Obtención de reacciones
0= B Σ M ; 03
444 =− y A
ton3
4= y A
0= y Σ F ; 38= y B ton
123
4
343
432
x x
x x x M(x) −=⎟
⎠
⎞⎜⎝
⎛ −=
Si x = 0, M = 0
Si x = 4, M = 0

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 172/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 165
309.2;3
16;0
43
4 22
===−= x x x
dx
dM(x)
Si x = 2.309 ; M = 2.053 ton−m
43
4 2 xV(x) −=
Si x = 0, V =3
4
Si x = 4, V = − 3
8
5.3.2 Momento torsionante
Si se presentan cargas excéntricas respecto al eje del miembro estructural, entonces se generanmomentos torsionantes internos en la forma que se ilustra en la Figura 5.45.
Z
B
P
PC
X
A
Y
Pb M M T x ==
a P M y =
Aapyoelenreaccioneslassony, y x M M P
3 6 b
48 a
Figura 5.45. Estructura con momento torsionante.
De acuerdo a los conceptos e ideas vistas anteriormente los diagramas de elementos mecánicos se
muestran en la Figura 5.46.
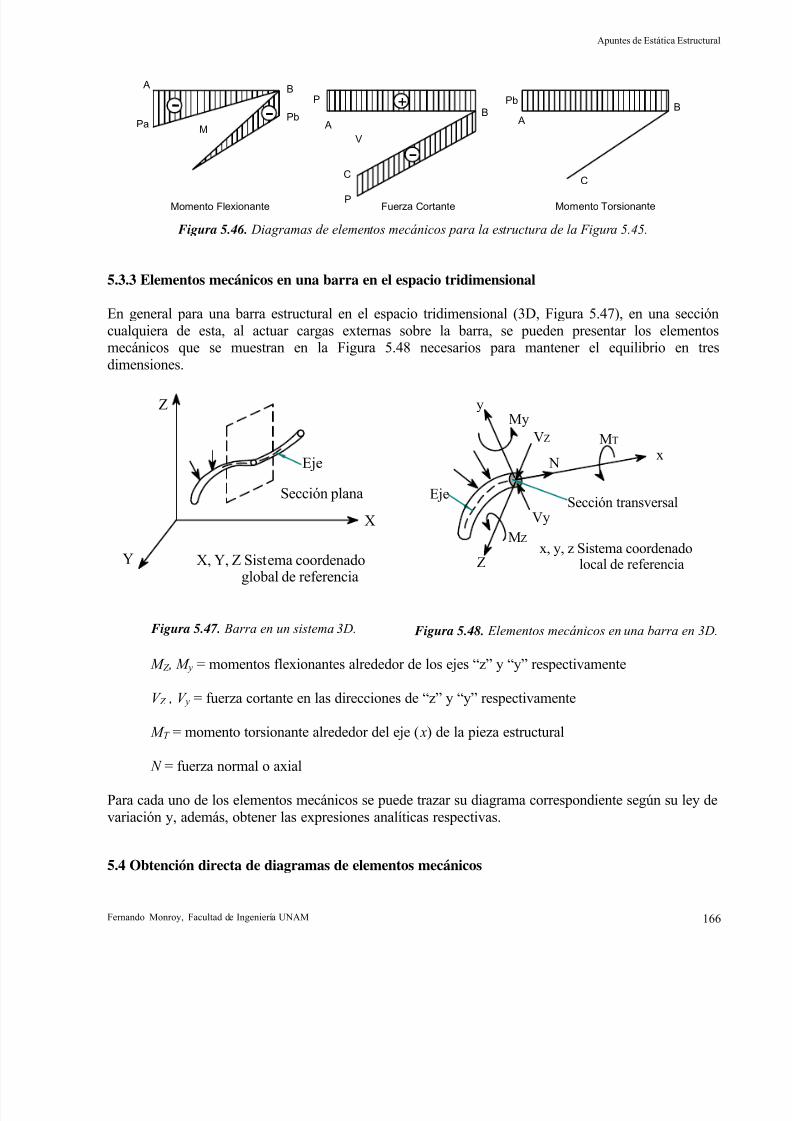
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 173/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 166
PbPa
A
-B
M
- +P
-
A
B
V
C
P
PbB
A
C
Momento Flexionante Fuerza Cortante Momento Torsionante
Figura 5.46. Diagramas de elementos mecánicos para la estructura de la Figura 5.45.
5.3.3 Elementos mecánicos en una barra en el espacio tridimensional
En general para una barra estructural en el espacio tridimensional (3D, Figura 5.47), en una seccióncualquiera de esta, al actuar cargas externas sobre la barra, se pueden presentar los elementosmecánicos que se muestran en la Figura 5.48 necesarios para mantener el equilibrio en tresdimensiones.
Eje
Sección plana
X
Z
Y X, Y, Z Sistema coordenado global de referencia
Figura 5.47. Barra en un sistema 3D.
Eje
xMT
VyMZ
Z
yMy
N
Sección transversal
VZ
x, y, z Sistema coordenado
local de referencia
Figura 5.48. Elementos mecánicos en una barra en 3D.
M Z , M y = momentos flexionantes alrededor de los ejes “z” y “y” respectivamente
V Z , V y = fuerza cortante en las direcciones de “z” y “y” respectivamente
M T = momento torsionante alrededor del eje ( x) de la pieza estructural
N = fuerza normal o axial
Para cada uno de los elementos mecánicos se puede trazar su diagrama correspondiente según su ley devariación y, además, obtener las expresiones analíticas respectivas.
5.4 Obtención directa de diagramas de elementos mecánicos
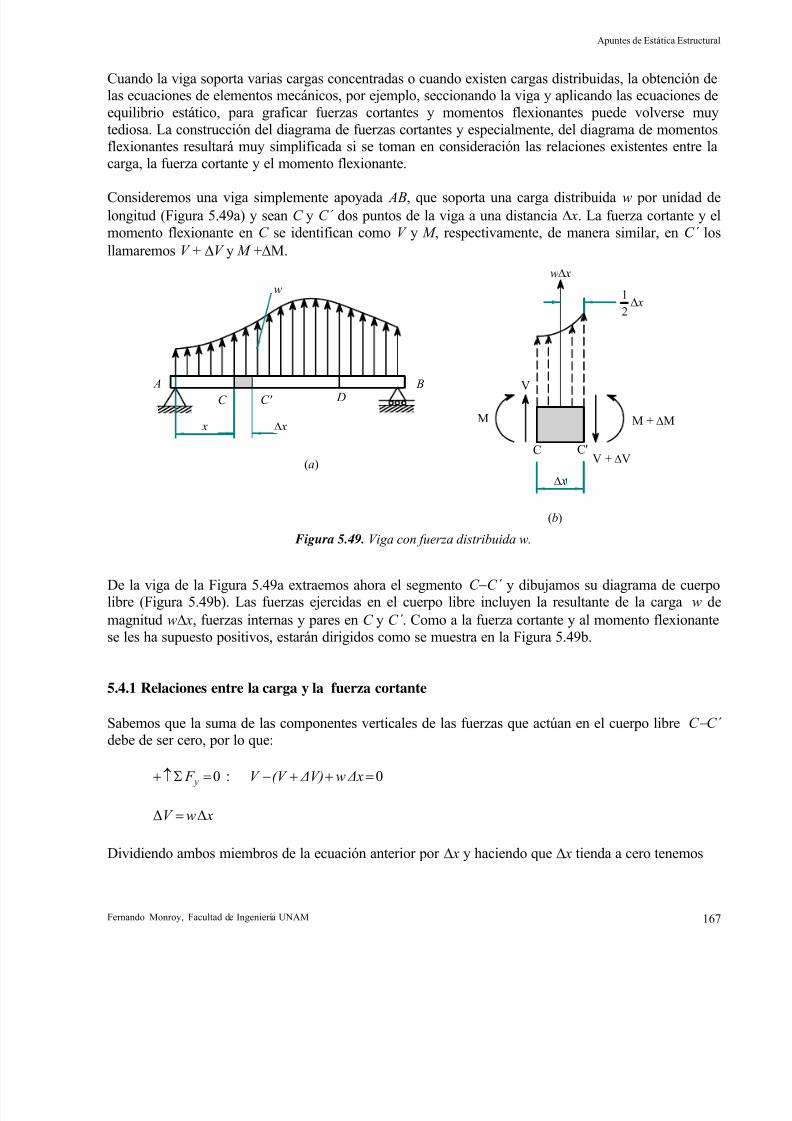
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 174/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 167
Cuando la viga soporta varias cargas concentradas o cuando existen cargas distribuidas, la obtención delas ecuaciones de elementos mecánicos, por ejemplo, seccionando la viga y aplicando las ecuaciones deequilibrio estático, para graficar fuerzas cortantes y momentos flexionantes puede volverse muytediosa. La construcción del diagrama de fuerzas cortantes y especialmente, del diagrama de momentosflexionantes resultará muy simplificada si se toman en consideración las relaciones existentes entre lacarga, la fuerza cortante y el momento flexionante.
Consideremos una viga simplemente apoyada AB, que soporta una carga distribuida w por unidad delongitud (Figura 5.49a) y sean C y C´ dos puntos de la viga a una distancia Δ x. La fuerza cortante y elmomento flexionante en C se identifican como V y M , respectivamente, de manera similar, en C´ losllamaremos V + ΔV y M +ΔM.
25 8
A
C C' D B
x Δ x
(a)
w
M M + ΔM
V
C C'V + ΔV
(b)
20Δ x
wΔ x
10 xΔ
21
Figura 5.49. Viga con fuerza distribuida w.
De la viga de la Figura 5.49a extraemos ahora el segmento C −C´ y dibujamos su diagrama de cuerpolibre (Figura 5.49b). Las fuerzas ejercidas en el cuerpo libre incluyen la resultante de la carga w demagnitud wΔ x, fuerzas internas y pares en C y C´ . Como a la fuerza cortante y al momento flexionantese les ha supuesto positivos, estarán dirigidos como se muestra en la Figura 5.49b.
5.4.1 Relaciones entre la carga y la fuerza cortante
Sabemos que la suma de las componentes verticales de las fuerzas que actúan en el cuerpo libre C − C´
debe de ser cero, por lo que:
0=Σ↑+ y F : 0=++− x ΔwV) Δ(V V
xwV ΔΔ =
Dividiendo ambos miembros de la ecuación anterior por Δ x y haciendo que Δ x tienda a cero tenemos

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 175/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 168
wdx
dV = (5.1)
La ecuación (5.1) indica que, para una viga cargada como la de la Figura 5.49a, la pendiente dV/dx dela curva de fuerza cortante en cualquier punto es igual a la carga por unidad de longitud (w).
Integrando (5.1) entre C y D, tenemos
∫=− D
C
x
xC D dxwV V (5.2)
V D − V C = área bajo la curva de carga entre C y D (5.3)
V D = V C + área bajo la curva de carga entre C y D (5.4)
Obsérvese que este resultado también pudo haberse obtenido considerando el equilibrio del segmentoCD de la viga, puesto que el área bajo la curva de carga, representa la carga total aplicada entre los
puntos C y D.
Debe anotarse que la ecuación (5.1) no es valida en un punto en donde se aplique una cargaconcentrada; la curva de fuerza cortante resulta discontinua en dicho punto. Análogamente, lasecuaciones (5.2) y (5.3) dejan de ser validas cuando se aplican cargas concentradas entre C y D, puestoque no toman en consideración el cambio súbito en la fuerza cortante producido por una cargaconcentrada. Las ecuaciones (5.2) y (5.3), por lo tanto, deben aplicarse únicamente entre cargasconcentradas sucesivas y/o en segmentos con carga distribuida.
Si una o varias fuerzas concentradas externas actúa sobre el segmento de viga analizado, la ecuación(5.4) se modifica quedando como:
− V D + V C + área bajo la curva de carga entre C y D + Σ Fext C−D = 0
En la ecuación anterior Σ Fext es la suma de fuerzas externas concentradas (perpendiculares al eje de la barra) aplicadas al segmento CD, entonces
V D = V C + área bajo la curva de carga entre C y D + Σ Fext C−D
5.4.2 Relaciones entre fuerza cortante y momento flexionante
Regresando al diagrama de cuerpo libre de la Figura 5.49b y escribiendo la suma de los momentos conrespecto a C' e igualando la a es cero (momentos horarios se consideran positivos) tenemos
0' =Σ C M ; 02
)( =Δ
Δ−Δ++Δ+− x
xw xV M M M
2)(
2
1 xw xV M Δ+Δ=Δ

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 176/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 169
Despreciando diferenciales de orden superior y dividiendo ambos miembros de la ecuación por Δ x yhaciendo que Δ x tienda a cero, obtenemos:
V dx
dM = (5.5)
La ecuación (5.5) indica que la pendiente dM/dx de la curva de momento flexionante es igual a1 valorde la fuerza cortante. Esto es cierto en cualquier punto en donde la fuerza cortante tenga un valor biendefinido, es decir, en cualquier punto en donde no hay una carga concentrada. La ecuación (5.5)muestra también que la fuerza cortante es cero en puntos en donde el momento flexionante es máximo.Como aplicación de lo anterior, esta propiedad facilita la identificación de puntos en donde la viga puede fallar a flexión.
Integrando (5.5) entre los puntos C y D, tenemos
∫=− D
C
x
xC D dxV M M (5.6)
M D − M C = área bajo la curva de fuerza cortante entre los puntos C y D (5.7)
M D = M C + área bajo la curva de fuerza cortante entre los puntos C y D (5.8)
Nótese que el área bajo la curva de fuerza cortante debe ser considerada positiva cuando la fuerzacortante sea positiva y negativa en caso contrario. Las ecuaciones (5.6) y (5.7) son validas aunque seapliquen cargas concentradas entre los puntos C y D, siempre y cuando, la curva de fuerza cortantehaya sido bien trazada. Las ecuaciones (5.6) y (5.7) dejan de ser validas, cuando se aplica un par en un punto entre C y D, puesto que en su obtención no se tomó en cuenta el súbito cambio en momentoflexionante, producido por un par.
Puede verse que si sobre el segmento actúan pares externos M1, M2, … cuya suma consideremos comoΣ Mext C-D la ecuación (5.8) queda como:
M D = M C + área bajo la curva de fuerza cortante entre los puntos C y D + Σ Mext C−D (5.9)
5.4.3 Ejemplos
A continuación se desarrollan algunos ejemplos sencillos que muestran la aplicación de loanteriormente expuesto, principalmente de las ecuaciones (5.4) a (5.8).
Ejemplo 5.13. Trazar los diagramas de fuerza cortante y de momento flexionante para la vigasimplemente apoyada de la Figura 5.50a y obtenga el valor máximo del momento flexionante.
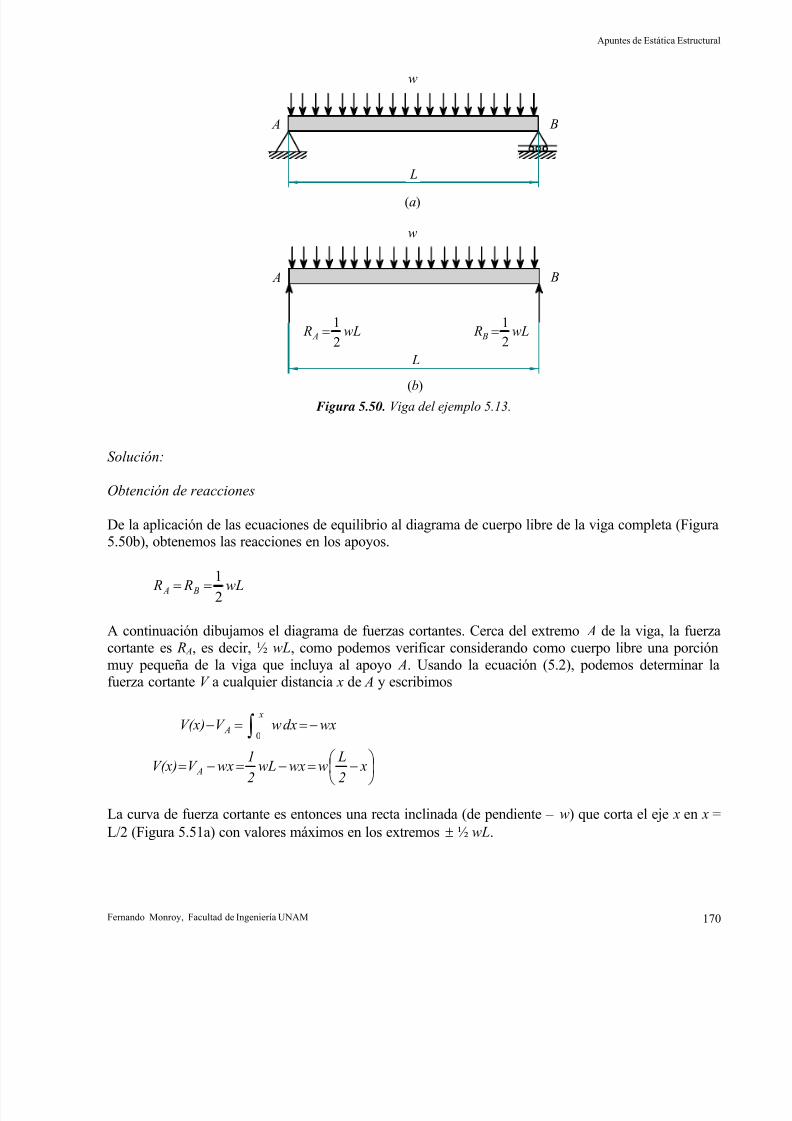
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 177/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 170
A B
(a)
w
98 L
A B
(b)
w
98 L
wL R A 2
1= wL R B 2
1=
Figura 5.50. Viga del ejemplo 5.13.
Solución:
Obtención de reacciones
De la aplicación de las ecuaciones de equilibrio al diagrama de cuerpo libre de la viga completa (Figura5.50b), obtenemos las reacciones en los apoyos.
wL R R B A 2
1==
A continuación dibujamos el diagrama de fuerzas cortantes. Cerca del extremo A de la viga, la fuerzacortante es R A, es decir, ½ wL, como podemos verificar considerando como cuerpo libre una porciónmuy pequeña de la viga que incluya al apoyo A. Usando la ecuación (5.2), podemos determinar lafuerza cortante V a cualquier distancia x de A y escribimos
⎟ ⎠ ⎞⎜
⎝ ⎛ −=−=−=
−==− ∫ x
2
LwwxwL
2
1wxV V(x)
wxdxwV V(x)
A
x
A0
La curva de fuerza cortante es entonces una recta inclinada (de pendiente – w) que corta el eje x en x =L/2 (Figura 5.51a) con valores máximos en los extremos ± ½ wL.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 178/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 171
V ( x)
L x
wL21
wL21
−(a)
8
2wL
M ( x)
L x
(b)
48 L
21
47 L2
1
Figura 5.51. Diagramas de elementos mecánicos, viga del ejemplo 5.13.
Obtención de momentos flexionantes
En relación al momento flexionante observamos en primer lugar que M A = 0. El valor del momentoflexionante M a cualquier distancia x ( M ( x)) desde A puede obtenerse a partir de la ecuación (5.5);escribimos
( )2 x
0
x
0 A
x Lxw2
1dx x
2
Lw x M
dxV M x M
−=⎟ ⎠
⎞⎜⎝
⎛ −=
=−
∫
∫)(
)(
Analizando la ecuación anterior podemos ver que la curva de momento flexionante es una parábola. Elvalor máximo ocurre en x = L/2 puesto que V (y por lo tanto dM/dx) es cero para ese valor de x.Sustituyendo x = L/2 en la ecuación anterior tenemos que M máx= wL
2/8 (Figura 5.51b).
En la mayoría de las aplicaciones de ingeniería, es necesario conocer el valor del momento flexionante
solamente en unos pocos puntos específicos. Una vez que el diagrama de fuerza cortante ha sidodibujado y por equilibrio, por ejemplo, se determina el momento M en uno de los extremos de la viga,el valor del momento flexionante puede calcularse en cualquier punto, evaluando el área bajo la curvade fuerza cortante y usando la ecuación (5.9). Por ejemplo, como M A = 0 para la viga de la Figura5.50a, el valor máximo del momento flexionante para esa viga, puede obtenerse simplemente midiendoel área del triángulo sombreado en el diagrama de fuerzas cortantes de la Figura 5.51a, entonces
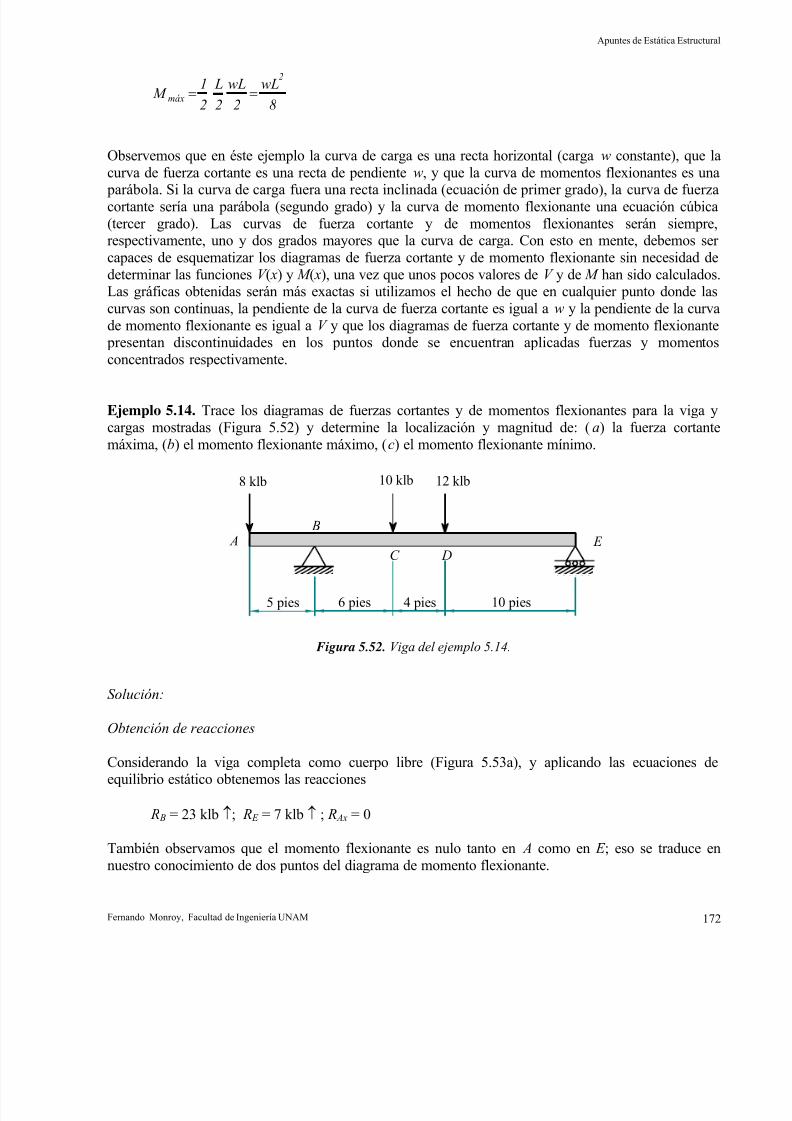
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 179/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 172
8
wL
2
wL
2
L
2
1 M
2
máx ==
Observemos que en éste ejemplo la curva de carga es una recta horizontal (carga w constante), que lacurva de fuerza cortante es una recta de pendiente w, y que la curva de momentos flexionantes es una
parábola. Si la curva de carga fuera una recta inclinada (ecuación de primer grado), la curva de fuerzacortante sería una parábola (segundo grado) y la curva de momento flexionante una ecuación cúbica(tercer grado). Las curvas de fuerza cortante y de momentos flexionantes serán siempre,respectivamente, uno y dos grados mayores que la curva de carga. Con esto en mente, debemos sercapaces de esquematizar los diagramas de fuerza cortante y de momento flexionante sin necesidad dedeterminar las funciones V ( x) y M ( x), una vez que unos pocos valores de V y de M han sido calculados.Las gráficas obtenidas serán más exactas si utilizamos el hecho de que en cualquier punto donde lascurvas son continuas, la pendiente de la curva de fuerza cortante es igual a w y la pendiente de la curvade momento flexionante es igual a V y que los diagramas de fuerza cortante y de momento flexionante presentan discontinuidades en los puntos donde se encuentran aplicadas fuerzas y momentosconcentrados respectivamente.
Ejemplo 5.14. Trace los diagramas de fuerzas cortantes y de momentos flexionantes para la viga ycargas mostradas (Figura 5.52) y determine la localización y magnitud de: (a) la fuerza cortantemáxima, (b) el momento flexionante máximo, (c) el momento flexionante mínimo.
AC D
E
25 30 20 50
8 klb 10 klb 12 klb
B
6 pies 10 pies5 pies 4 pies
Figura 5.52. Viga del ejemplo 5.14.
Solución:
Obtención de reacciones
Considerando la viga completa como cuerpo libre (Figura 5.53a), y aplicando las ecuaciones deequilibrio estático obtenemos las reacciones
R B = 23 klb ↑; R E = 7 klb ↑ ; R Ax = 0
También observamos que el momento flexionante es nulo tanto en A como en E ; eso se traduce ennuestro conocimiento de dos puntos del diagrama de momento flexionante.
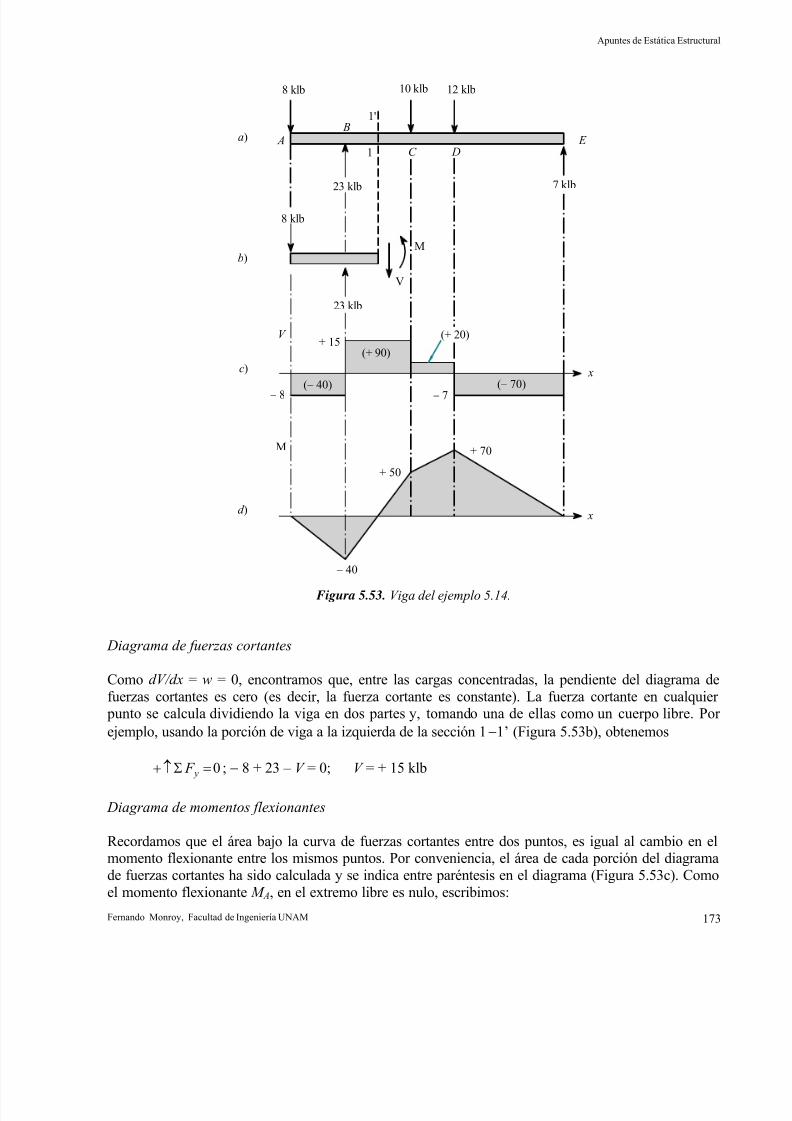
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 180/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 173
AC D
E
8 klb 10 klb 12 klb
B
1
8 klb
23 klb
M
V
23 klb
V + 15
(+ 20)
− 7− 8
M
− 40
+ 50
+ 70
x
x
7 klb
a)
b)
c)
d )
1'
(− 40)
(+ 90)
(− 70)
Figura 5.53. Viga del ejemplo 5.14.
Diagrama de fuerzas cortantes
Como dV/dx = w = 0, encontramos que, entre las cargas concentradas, la pendiente del diagrama defuerzas cortantes es cero (es decir, la fuerza cortante es constante). La fuerza cortante en cualquier punto se calcula dividiendo la viga en dos partes y, tomando una de ellas como un cuerpo libre. Porejemplo, usando la porción de viga a la izquierda de la sección 1−1’ (Figura 5.53b), obtenemos
0=Σ↑+ y F ; − 8 + 23 – V = 0; V = + 15 klb
Diagrama de momentos flexionantes
Recordamos que el área bajo la curva de fuerzas cortantes entre dos puntos, es igual al cambio en elmomento flexionante entre los mismos puntos. Por conveniencia, el área de cada porción del diagramade fuerzas cortantes ha sido calculada y se indica entre paréntesis en el diagrama (Figura 5.53c). Comoel momento flexionante M A, en el extremo libre es nulo, escribimos:
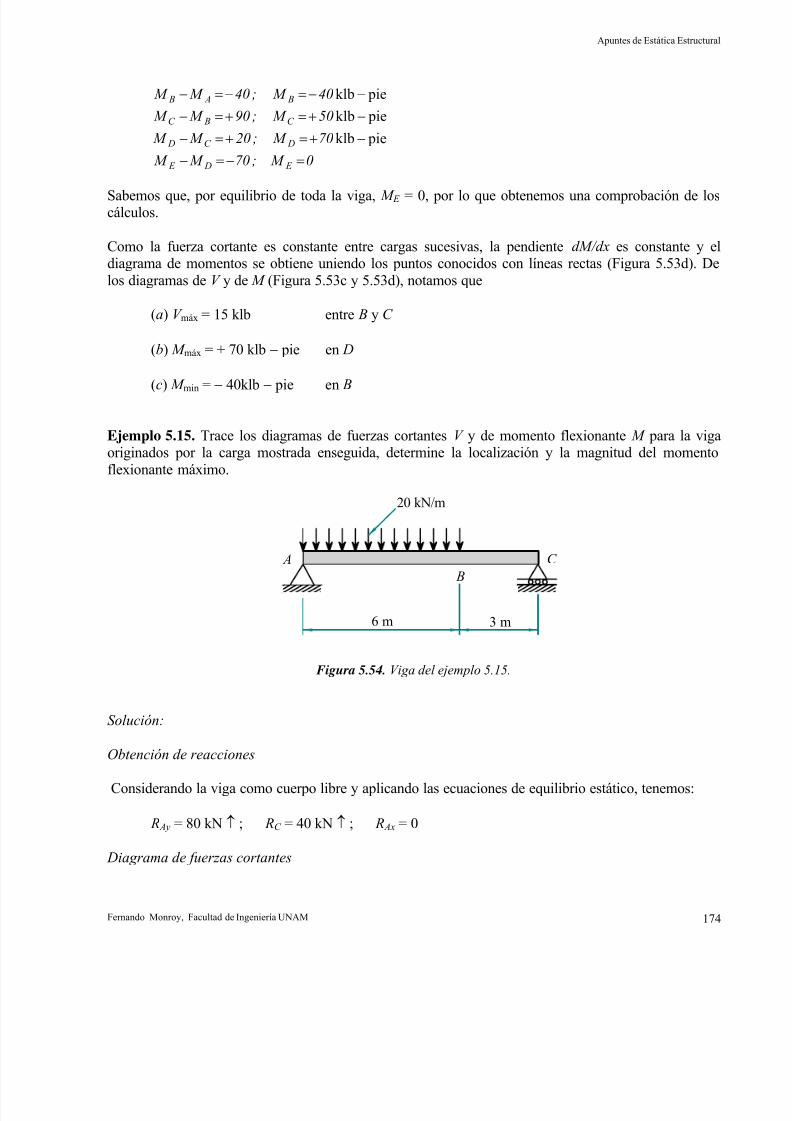
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 181/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 174
0 M ;70 M M
70 M ;20 M M
50 M ;90 M M
40 M ;40 M M
E D E
DC D
C BC
B A B
=−=−
−+=+=−
−+=+=−
−−=−=−
pieklb
pieklb
pieklb
Sabemos que, por equilibrio de toda la viga, M E = 0, por lo que obtenemos una comprobación de loscálculos.
Como la fuerza cortante es constante entre cargas sucesivas, la pendiente dM/dx es constante y eldiagrama de momentos se obtiene uniendo los puntos conocidos con líneas rectas (Figura 5.53d). Delos diagramas de V y de M (Figura 5.53c y 5.53d), notamos que
(a) V máx = 15 klb entre B y C
(b) M máx = + 70 klb − pie en D
(c) M min = − 40klb − pie en B
Ejemplo 5.15. Trace los diagramas de fuerzas cortantes V y de momento flexionante M para la vigaoriginados por la carga mostrada enseguida, determine la localización y la magnitud del momentoflexionante máximo.
A C
20 kN/m
B
60 303 m6 m
Figura 5.54. Viga del ejemplo 5.15.
Solución:
Obtención de reacciones
Considerando la viga como cuerpo libre y aplicando las ecuaciones de equilibrio estático, tenemos:
R Ay = 80 kN ↑ ; RC = 40 kN ↑ ; R Ax = 0
Diagrama de fuerzas cortantes
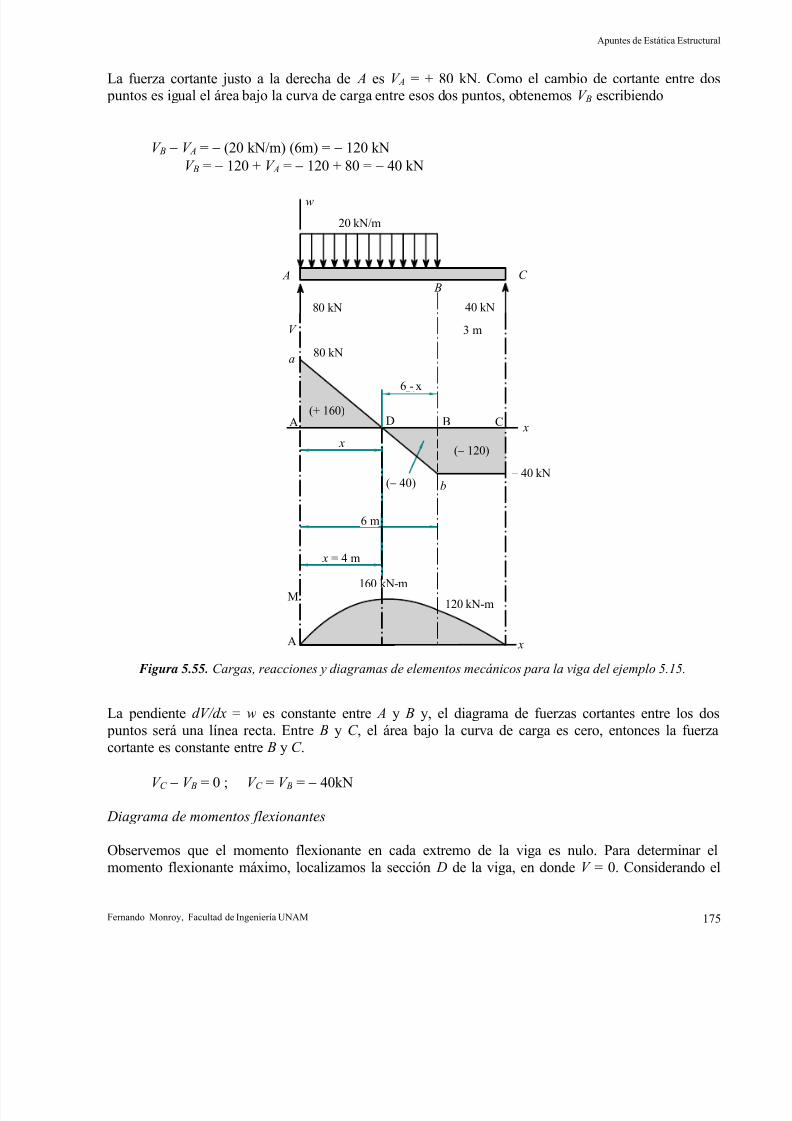
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 182/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 175
La fuerza cortante justo a la derecha de A es V A = + 80 kN. Como el cambio de cortante entre dos puntos es igual el área bajo la curva de carga entre esos dos puntos, obtenemos V B escribiendo
V B − V A = − (20 kN/m) (6m) = − 120 kNV B = − 120 + V A = − 120 + 80 = − 40 kN
A C
20 kN/m
B
3 m
w
80 kN
80 kN
40 kN
V
a
A(+ 160)
xD B C
(− 40) b
(− 120)
− 40 kN
60
36 x
36
M
A
160 kN-m
x
120 kN-m
x = 4 m
6 m
246 - x
Figura 5.55. Cargas, reacciones y diagramas de elementos mecánicos para la viga del ejemplo 5.15.
La pendiente dV/dx = w es constante entre A y B y, el diagrama de fuerzas cortantes entre los dos puntos será una línea recta. Entre B y C , el área bajo la curva de carga es cero, entonces la fuerza
cortante es constante entre B y C .
V C − V B = 0 ; V C = V B = − 40kN
Diagrama de momentos flexionantes
Observemos que el momento flexionante en cada extremo de la viga es nulo. Para determinar elmomento flexionante máximo, localizamos la sección D de la viga, en donde V = 0. Considerando el
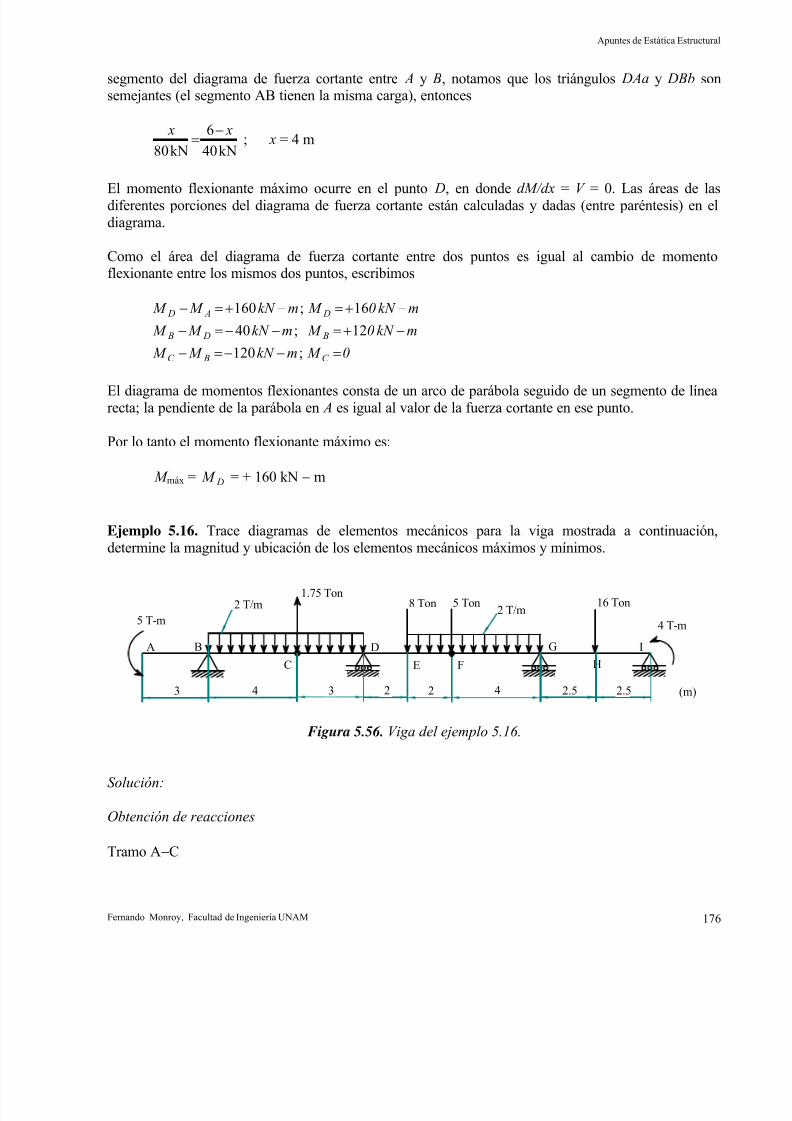
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 183/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 176
segmento del diagrama de fuerza cortante entre A y B, notamos que los triángulos DAa y DBb sonsemejantes (el segmento AB tienen la misma carga), entonces
kN40
6
kN80
x x −= ; x = 4 m
El momento flexionante máximo ocurre en el punto D, en donde dM/dx = V = 0. Las áreas de lasdiferentes porciones del diagrama de fuerza cortante están calculadas y dadas (entre paréntesis) en eldiagrama.
Como el área del diagrama de fuerza cortante entre dos puntos es igual al cambio de momentoflexionante entre los mismos dos puntos, escribimos
0 M mkN M M
mkN 0 M mkN M M
mkN 0 M mkN M M
C BC
B D B
D A D
=−−=−
−+=−−=−
−+=−+=−
;120
12;40
16;160
El diagrama de momentos flexionantes consta de un arco de parábola seguido de un segmento de línearecta; la pendiente de la parábola en A es igual al valor de la fuerza cortante en ese punto.
Por lo tanto el momento flexionante máximo es:
M máx = D M = + 160 kN − m
Ejemplo 5.16. Trace diagramas de elementos mecánicos para la viga mostrada a continuación,determine la magnitud y ubicación de los elementos mecánicos máximos y mínimos.
404
C E F
G
H
A B
30
D
20 20 40 252.5422
I
303 252.53 (m)
2 T/m1.75 Ton
8 Ton 5 Ton2 T/m
16 Ton
4 T-m5 T-m
Figura 5.56. Viga del ejemplo 5.16.
Solución:
Obtención de reacciones
Tramo A−C
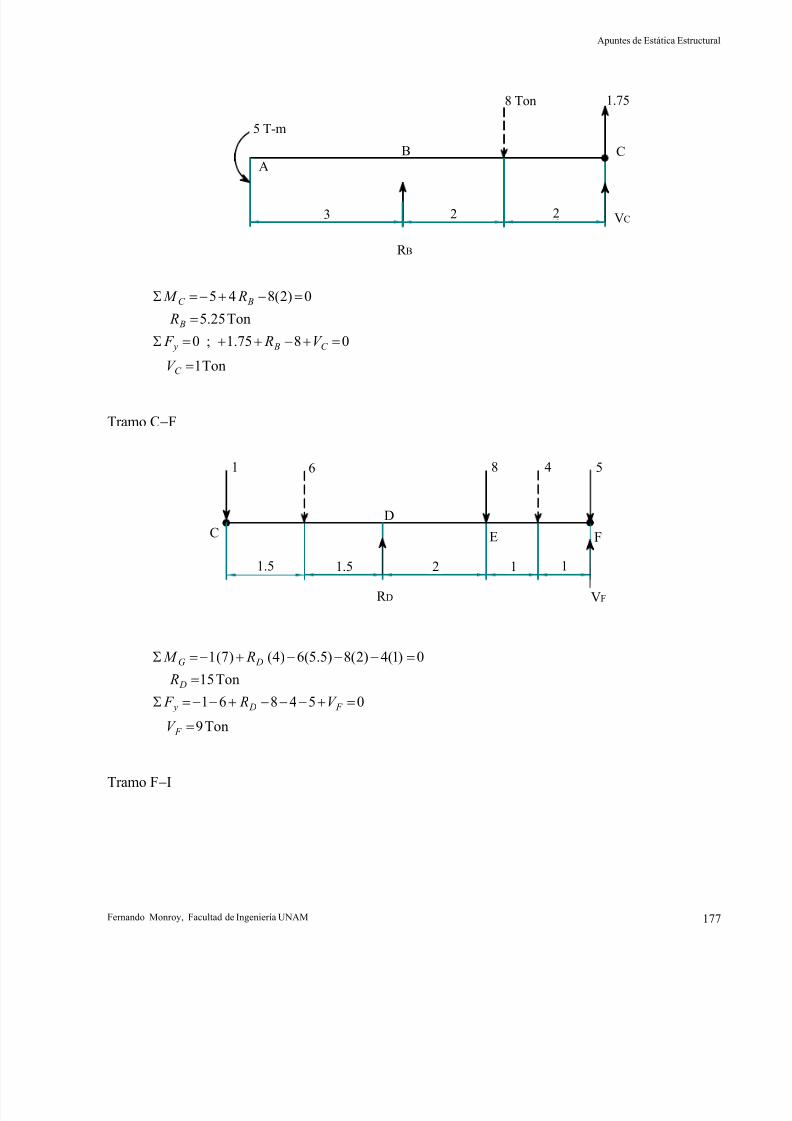
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 184/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 177
5 T-m
40
8 Ton 1.75
603 402 2
R B
VC
AB C
Ton1
0875.1;0
Ton25.5
0)2(845
=
=+−++=Σ
=
=−+−=Σ
C
C B y
B
BC
V
V R F
R
R M
Tramo C−F
30 30 40 20 20
D
R D
1 6 8 4 5
FE
VF
1.5 1.5 2 1 1
C
Ton9
054861
Ton15
0)1(4)2(8)5.5(6)4()7(1
=
=+−−−+−−=Σ
=
=−−−+−=Σ
F
F D y
D
DG
V
V R F
R
R M
Tramo F−I
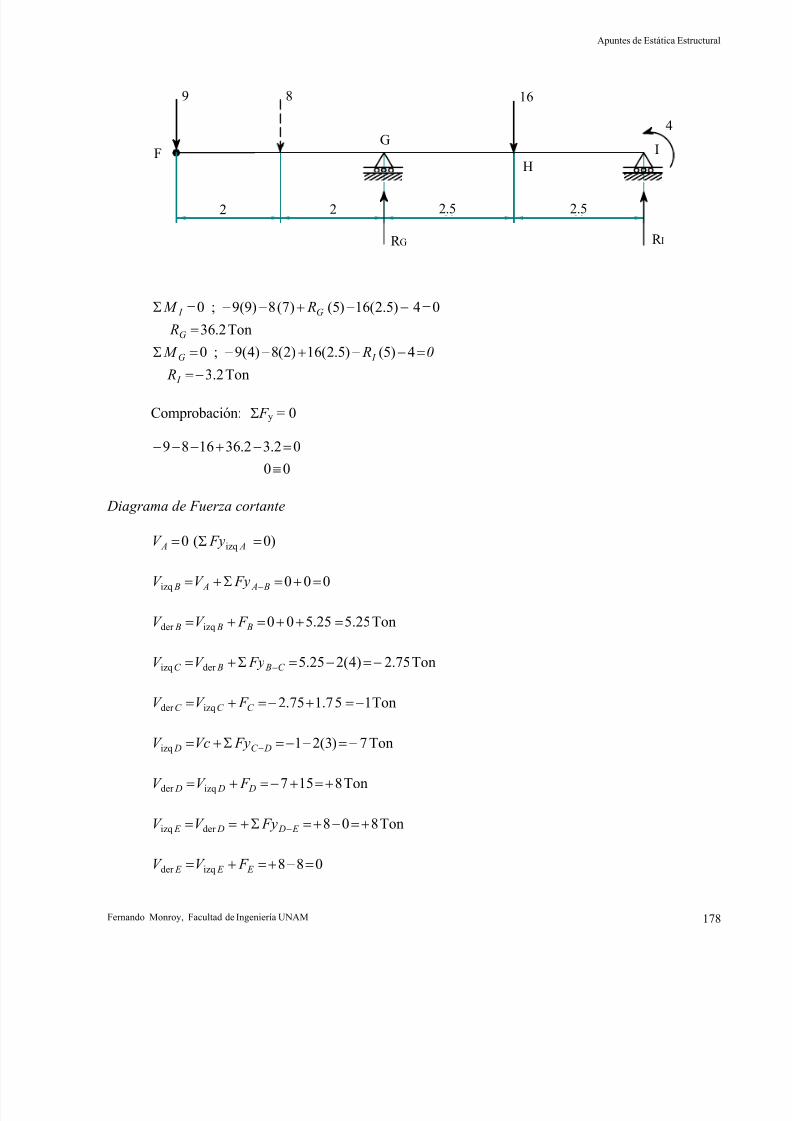
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 185/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 178
169 8
4
40 40 50 502 2 2.5 2.5
R G R I
FG
IH
Ton2.3
4)5()5.2(16)2(8)4(9;0
Ton2.36
04)5.2(16)5()7(8)9(9;0
−=
=−−+−−=Σ
=
=−−+−−=Σ
I
I G
G
G I
R
0 R M
R
R M
Comprobación: Σ F y = 0
00
02.32.361689
≡
=−+−−−
Diagrama de Fuerza cortante
)0(0 izq =Σ= A A FyV
000izq =+=Σ+= − B A A B FyV V
Ton25.525.500izqder =++=+= B B B F V V
Ton75.2)4(225.5der izq −=−=Σ+= −C B BC FyV V
Ton157.175.2izqder −=+−=+= C C C F V V
Ton7)3(21izq
−=−−=Σ+= − DC D
FyVcV
Ton8157izqder +=+−=+= D D D F V V
Ton808der izq +=−+=Σ+== − E D D E FyV V
088izqder =−+=+= E E E F V V

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 186/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 179
Ton4)2(20der izq −=−=Σ+== − F E E F FyV V
Ton954izqder −=−−=+= F F F F V V
Ton17)4(29der izq −=−−=Σ+= −G F F G FyV V
Ton2.192.3617izqder +=+−=+= GGG F V V
Ton2.1902.91der izq =+=Σ+= − H GG H FyV V
Ton2.3162.91izqder =−=+= H H H F V V
Ton2.302.3der izq =+=Σ+= − I H H I FyV V
02.32.3izqder =−=+= I I I F V V
En la Figura 5.57b se muestra el diagrama correspondiente, de donde se observa que:
V máx = + 19.2 Ton a la derecha del apoyo G
V min = − 17 Ton a la izquierda del apoyo G
Diagrama de momento de flexionante
Áreas del diagrama de fuerza cortante.
4;375.12
75.2;625.2
2
25.5=+==== baba
89.62
)25.5(1 ==
a A
89.12
)75.2(2 −=
−=
b A
12)3(2
713 −=−−= A
16)2(84 +== A
42
)2(45 −=
−= A
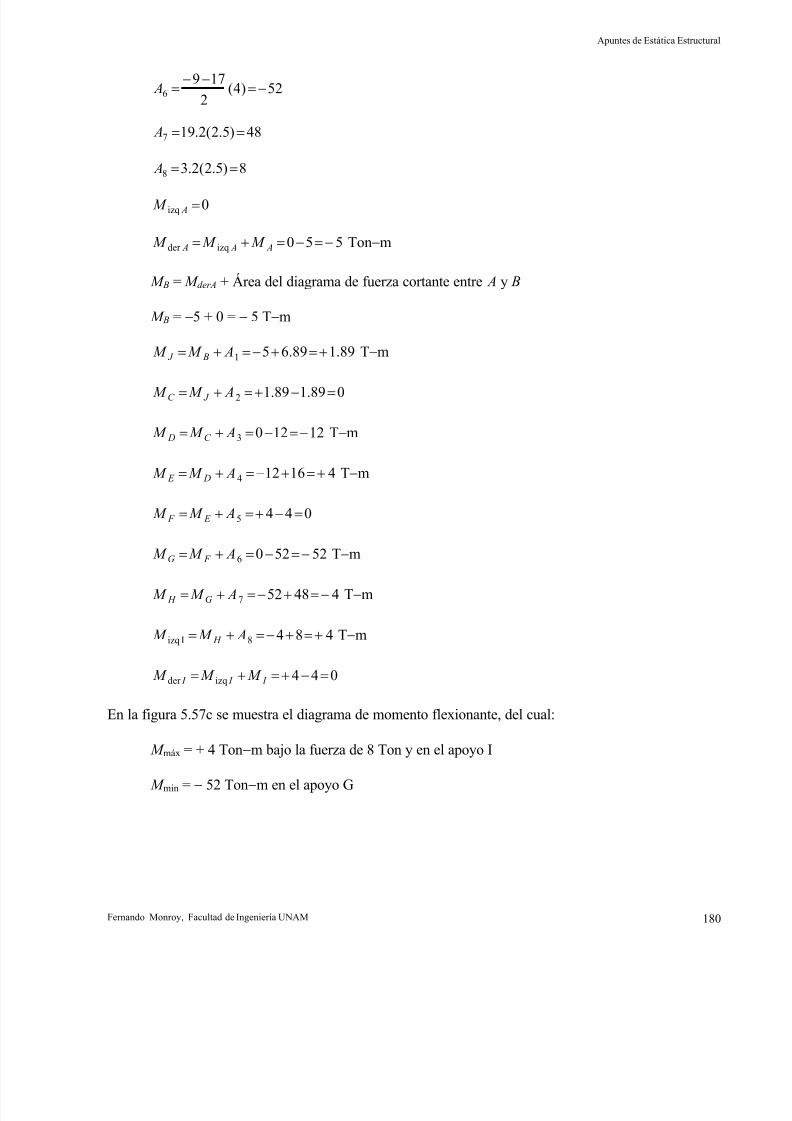
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 187/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 180
52)4(2
1796 −=
−−= A
48)5.2(2.197 == A
8)5.2(2.38 == A
0izq = A M
550izqder −=−=+= A A A M M M Ton−m
M B = M derA + Área del diagrama de fuerza cortante entre A y B
M B = −5 + 0 = − 5 T−m
89.189.651 +=+−=+= A M M B J T−m
089.189.12 =−+=+= A M M J C
121203 −=−=+= A M M C D T−m
416124 +=+−=+= A M M D E T−m
0445 =−+=+= A M M E F
525206
−=−=+= A M M F G
T−m
448527 −=+−=+= A M M G H T−m
4848Iizq +=+−=+= A M M H T−m
044izqder =−+=+= I I I M M M
En la figura 5.57c se muestra el diagrama de momento flexionante, del cual:
M máx = + 4 Ton−m bajo la fuerza de 8 Ton y en el apoyo I
M min = − 52 Ton−m en el apoyo G
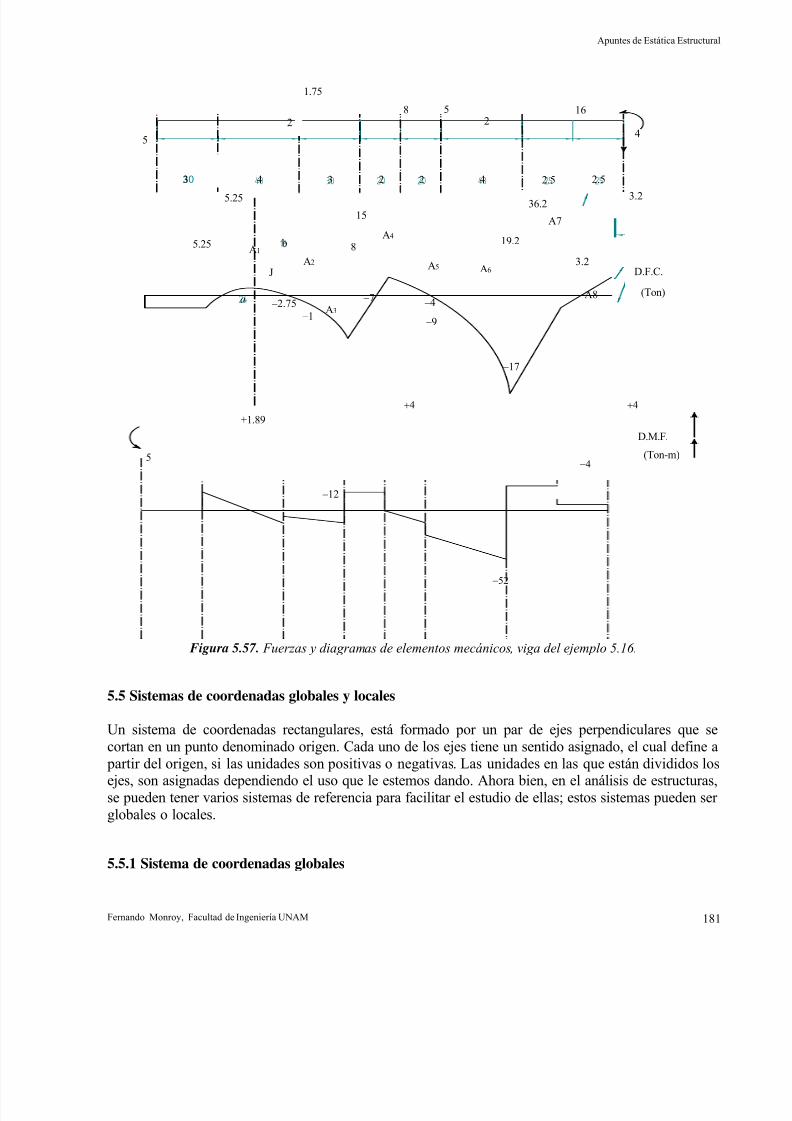
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 188/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 181
30 40 30 2020 40 25 25
4
3 4 3 2 2 4 2.5 2.5
5
2 28 5 16
5.25
15
3.2
5.25 A1
JA2
A3−1
24
16 b
a −7
8A4
A6
−4
−9
19.2
A7
3.2
A8
D.F.C.
(Ton)
A5
−17
−5
+1.89
−12
+4
−52
−4
+4
D.M.F.
(Ton-m)
1.75
36.2
−2.75
Figura 5.57. Fuerzas y diagramas de elementos mecánicos, viga del ejemplo 5.16.
5.5 Sistemas de coordenadas globales y locales
Un sistema de coordenadas rectangulares, está formado por un par de ejes perpendiculares que se
cortan en un punto denominado origen. Cada uno de los ejes tiene un sentido asignado, el cual define a partir del origen, si las unidades son positivas o negativas. Las unidades en las que están divididos losejes, son asignadas dependiendo el uso que le estemos dando. Ahora bien, en el análisis de estructuras,se pueden tener varios sistemas de referencia para facilitar el estudio de ellas; estos sistemas pueden serglobales o locales.
5.5.1 Sistema de coordenadas globales
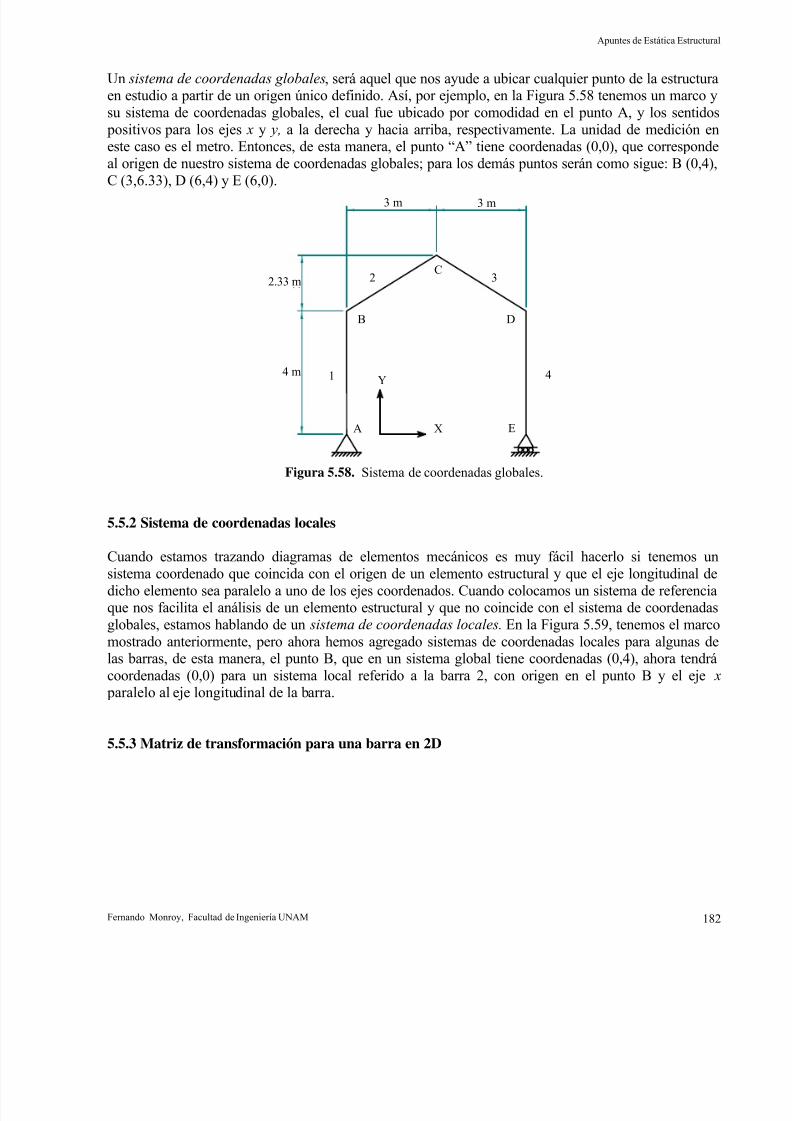
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 189/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 182
Un sistema de coordenadas globales, será aquel que nos ayude a ubicar cualquier punto de la estructuraen estudio a partir de un origen único definido. Así, por ejemplo, en la Figura 5.58 tenemos un marco ysu sistema de coordenadas globales, el cual fue ubicado por comodidad en el punto A, y los sentidos positivos para los ejes x y y, a la derecha y hacia arriba, respectivamente. La unidad de medición eneste caso es el metro. Entonces, de esta manera, el punto “A” tiene coordenadas (0,0), que correspondeal origen de nuestro sistema de coordenadas globales; para los demás puntos serán como sigue: B (0,4),
C (3,6.33), D (6,4) y E (6,0).
A
B
C
D
1
2 3
4
E
5
5
2 5
40 40
4 m
2.33 m
3 m 3 m
X
Y
Figura 5.58. Sistema de coordenadas globales.
5.5.2 Sistema de coordenadas locales
Cuando estamos trazando diagramas de elementos mecánicos es muy fácil hacerlo si tenemos unsistema coordenado que coincida con el origen de un elemento estructural y que el eje longitudinal dedicho elemento sea paralelo a uno de los ejes coordenados. Cuando colocamos un sistema de referenciaque nos facilita el análisis de un elemento estructural y que no coincide con el sistema de coordenadasglobales, estamos hablando de un sistema de coordenadas locales. En la Figura 5.59, tenemos el marcomostrado anteriormente, pero ahora hemos agregado sistemas de coordenadas locales para algunas delas barras, de esta manera, el punto B, que en un sistema global tiene coordenadas (0,4), ahora tendrácoordenadas (0,0) para un sistema local referido a la barra 2, con origen en el punto B y el eje x paralelo al eje longitudinal de la barra.
5.5.3 Matriz de transformación para una barra en 2D
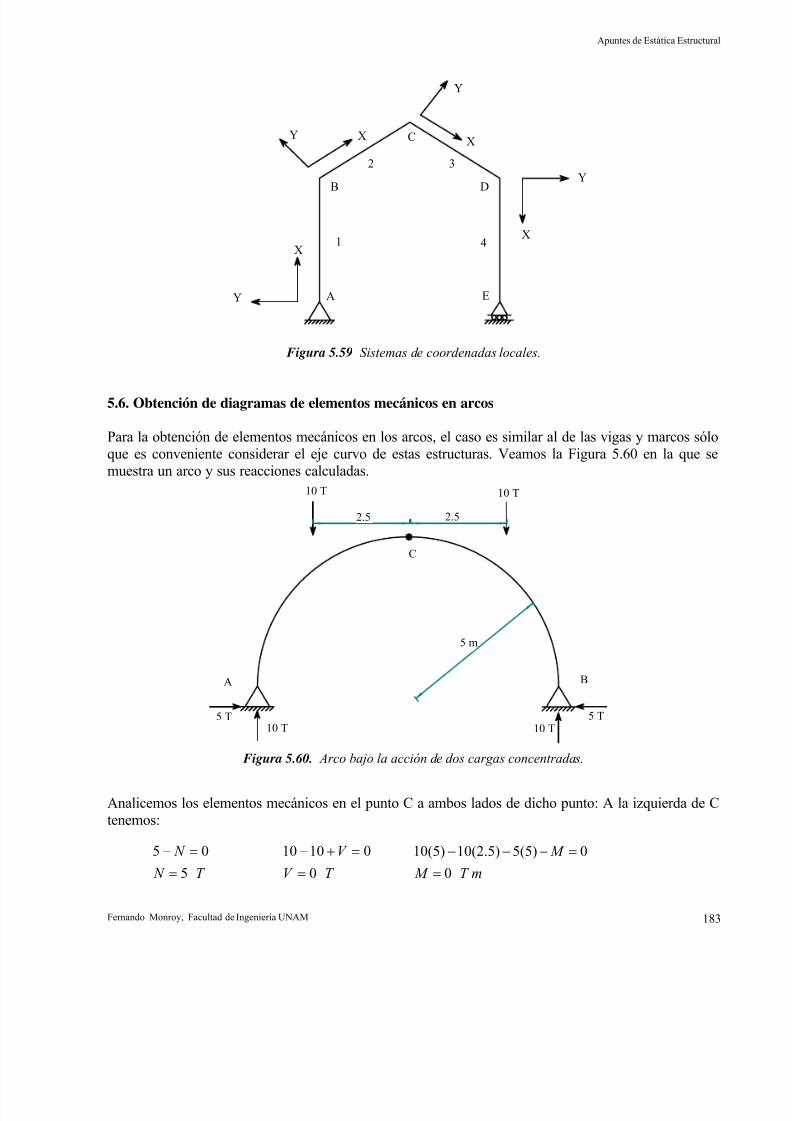
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 190/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 183
A
B
C
D
1
2 3
4
E
X
Y
XY
X
Y
X
Y
Figura 5.59 Sistemas de coordenadas locales.
5.6. Obtención de diagramas de elementos mecánicos en arcos
Para la obtención de elementos mecánicos en los arcos, el caso es similar al de las vigas y marcos sóloque es conveniente considerar el eje curvo de estas estructuras. Veamos la Figura 5.60 en la que semuestra un arco y sus reacciones calculadas.
C
A
5 T10 T
B
5 T10 T
7 0
10 T 10 T
5 m
452.5452.5
Figura 5.60. Arco bajo la acción de dos cargas concentradas.
Analicemos los elementos mecánicos en el punto C a ambos lados de dicho punto: A la izquierda de Ctenemos:
T N
N
5
05
=
=−
T V
V
0
01001
=
=+−
T m M
M
0
05(5)10(2.5)0(5)1
=
=−−−
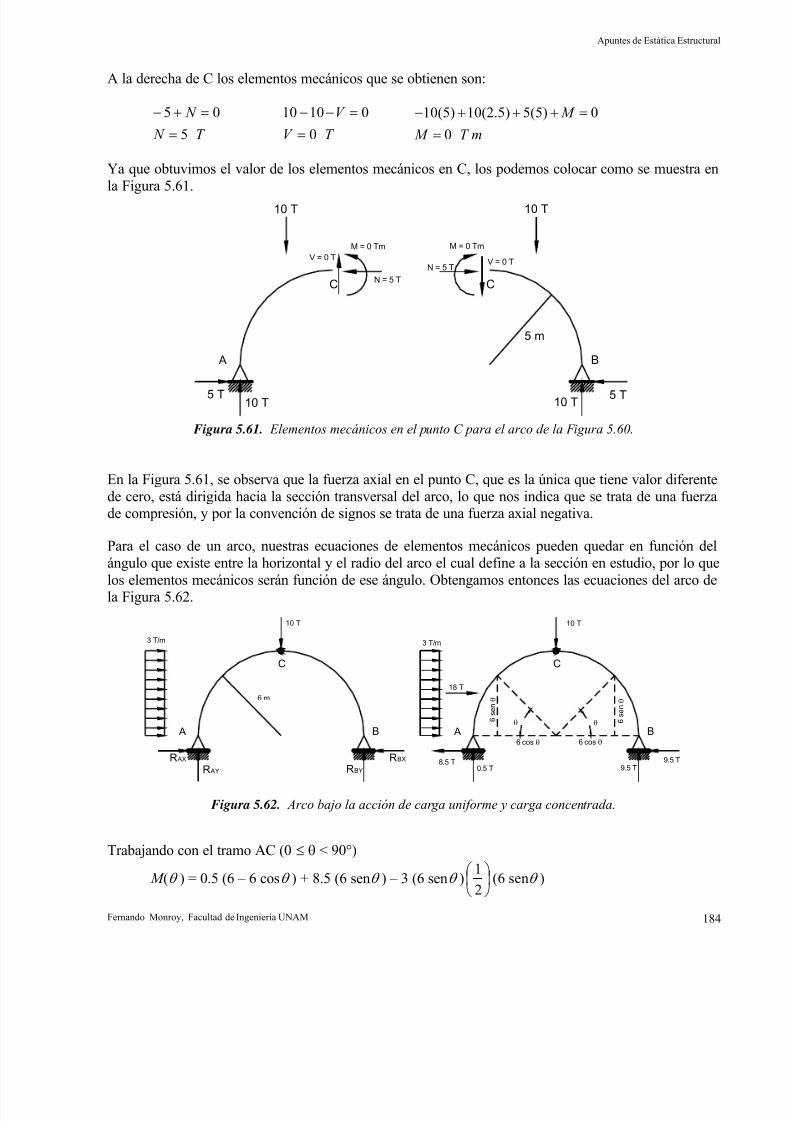
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 191/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 184
A la derecha de C los elementos mecánicos que se obtienen son:
T N
N
5
05
=
=+−
T V
V
0
01001
=
=−−
T m M
M
0
05(5)10(2.5)(5)10
=
=+++−
Ya que obtuvimos el valor de los elementos mecánicos en C, los podemos colocar como se muestra en
la Figura 5.61.
10 T5 T
A
10 T
C
10 T
5 T10 T
B
5 m
C
N = 5 T
M = 0 Tm
V = 0 T
M = 0 TmV = 0 T
N = 5 T
Figura 5.61. Elementos mecánicos en el punto C para el arco de la Figura 5.60.
En la Figura 5.61, se observa que la fuerza axial en el punto C, que es la única que tiene valor diferentede cero, está dirigida hacia la sección transversal del arco, lo que nos indica que se trata de una fuerzade compresión, y por la convención de signos se trata de una fuerza axial negativa.
Para el caso de un arco, nuestras ecuaciones de elementos mecánicos pueden quedar en función del
ángulo que existe entre la horizontal y el radio del arco el cual define a la sección en estudio, por lo quelos elementos mecánicos serán función de ese ángulo. Obtengamos entonces las ecuaciones del arco dela Figura 5.62.
RAX
A
3 T/m
C
6 m
RBX
B
RBYRAY
10 T
8.5 T
3 T/m
10 T
0.5 T 9.5 T
B
9.5 T
C
A
18 T
6
s e n
θ
6 cos θ 6 cos θ
6
s e n
θ
θθ
Figura 5.62. Arco bajo la acción de carga uniforme y carga concentrada.
Trabajando con el tramo AC (0 ≤ θ < 90°)
M (θ ) = 0.5 (6 – 6 cosθ ) + 8.5 (6 senθ ) – 3 (6 senθ ) ⎟ ⎠
⎞⎜⎝
⎛ 2
1(6 senθ )
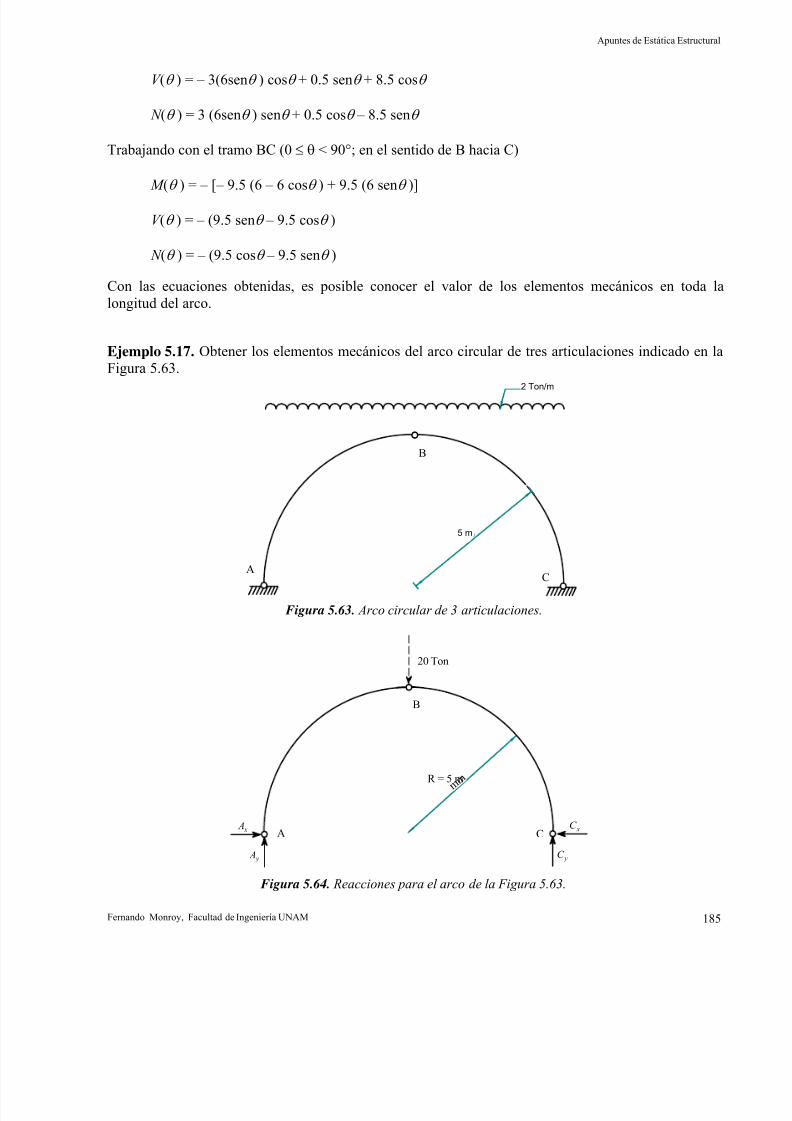
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 192/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 185
V (θ ) = – 3(6senθ ) cosθ + 0.5 senθ + 8.5 cosθ
N (θ ) = 3 (6senθ ) senθ + 0.5 cosθ – 8.5 senθ
Trabajando con el tramo BC (0 ≤ θ < 90°; en el sentido de B hacia C)
M (θ ) = – [– 9.5 (6 – 6 cosθ ) + 9.5 (6 senθ )]
V (θ ) = – (9.5 senθ – 9.5 cosθ )
N (θ ) = – (9.5 cosθ – 9.5 senθ )
Con las ecuaciones obtenidas, es posible conocer el valor de los elementos mecánicos en toda lalongitud del arco.
Ejemplo 5.17. Obtener los elementos mecánicos del arco circular de tres articulaciones indicado en laFigura 5.63.
B
CA
2 Ton/m
7 05 m
Figura 5.63. Arco circular de 3 articulaciones.
B
CA
20 Ton
7 0 m mR = 5 m
x A
y A
xC
yC
Figura 5.64. Reacciones para el arco de la Figura 5.63.
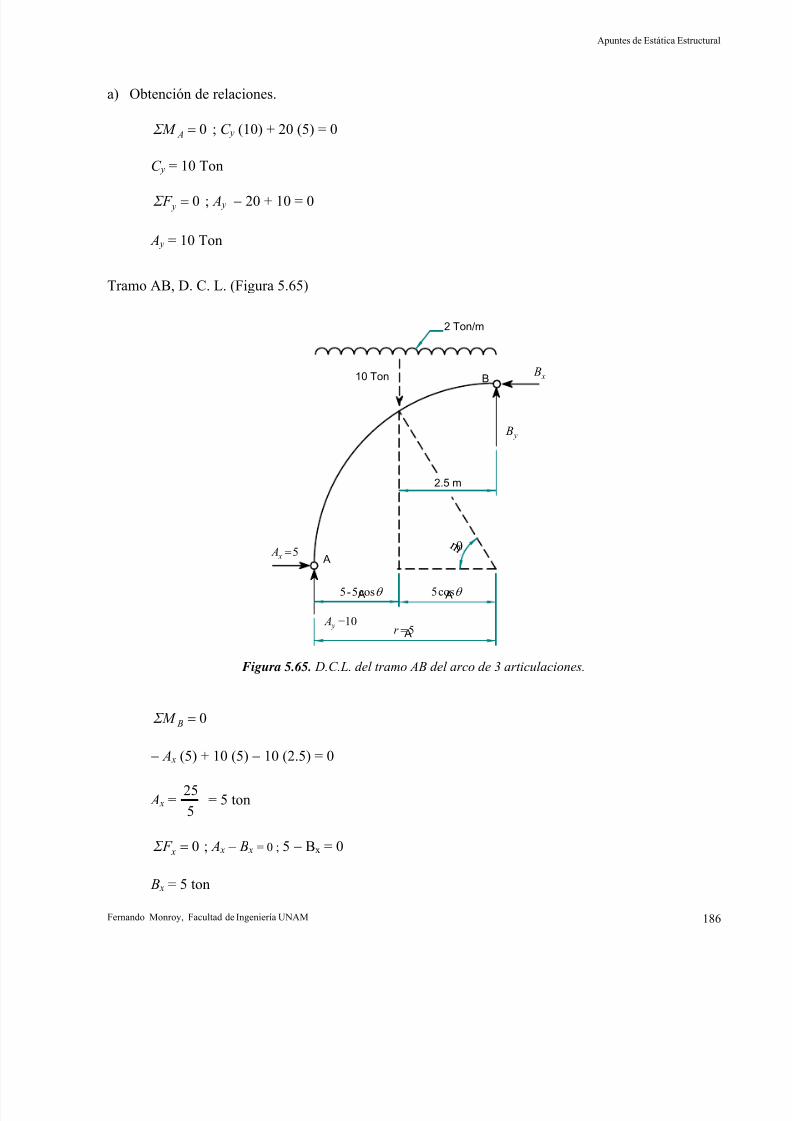
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 193/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 186
a) Obtención de relaciones.
0= A Σ M ; C y (10) + 20 (5) = 0
C y = 10 Ton
0= y Σ F ; A y − 20 + 10 = 0
A y = 10 Ton
Tramo AB, D. C. L. (Figura 5.65)
B
A
2 Ton/m
10 Ton
5= x A
33 37
70
382.5 m
A θ cos5-5
10= y A A5=r
A θ cos5
5 8 °m θ
x B
y B
Figura 5.65. D.C.L. del tramo AB del arco de 3 articulaciones.
0= B Σ M
− A x (5) + 10 (5) − 10 (2.5) = 0
A x =5
25 = 5 ton
0= x Σ F ; A x – B x = 0 ; 5 − Bx = 0
B x = 5 ton
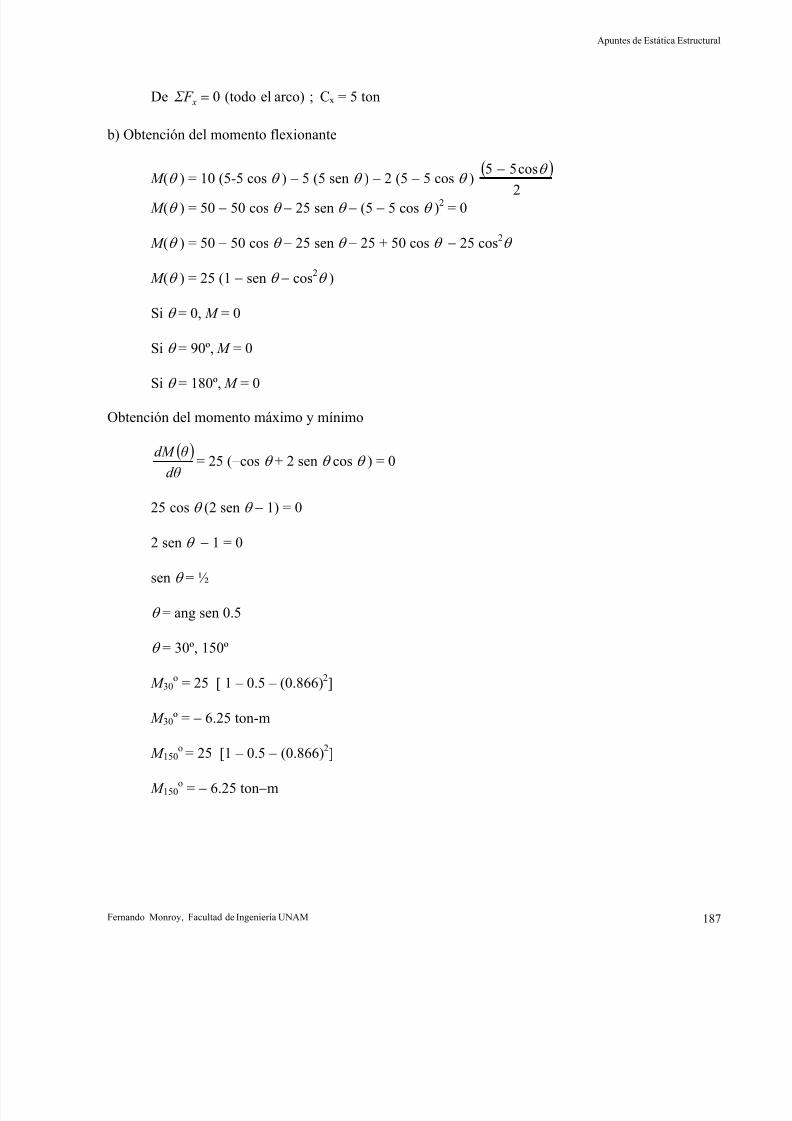
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 194/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 187
De 0= x Σ F (todo el arco) ; Cx = 5 ton
b) Obtención del momento flexionante
M (θ ) = 10 (5-5 cos θ ) − 5 (5 sen θ ) − 2 (5 − 5 cos θ )( )
2
cos55 θ −
M (θ ) = 50 − 50 cos θ − 25 sen θ − (5 − 5 cos θ )2 = 0
M (θ ) = 50 − 50 cos θ − 25 sen θ − 25 + 50 cos θ − 25 cos2θ
M (θ ) = 25 (1 − sen θ − cos2θ )
Si θ = 0, M = 0
Si θ = 90º, M = 0
Si θ = 180º, M = 0
Obtención del momento máximo y mínimo
( )d θ
θ dM = 25 (−cos θ + 2 sen θ cos θ ) = 0
25 cos θ (2 sen θ − 1) = 0
2 sen θ − 1 = 0
sen θ = ½
θ = ang sen 0.5
θ = 30º, 150º
M 30o = 25 [ 1 – 0.5 – (0.866)2]
M 30º = − 6.25 ton-m
M 150o = 25 [1 – 0.5 − (0.866)2]
M 150o = − 6.25 ton−m
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 195/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 188
+
3 2 6.25
-
o
3 26.25
2 6 °
2 7 ° 30
o 30
Figura 5.66. Diagrama de momento flexionante.
c) Obtención de la fuerza cortante
V (θ )= 10 sen θ – 5 cos θ − 2 (5 – 5 cos θ )(sen θ )
V (θ ) = 5 cos θ (2 – sen θ − 1)
V (θ )= 10 cos θ sen θ − 5 cos θ
Si θ = 0, V = − 5 ton
Si θ = 90º, V = 0
Si θ = 180º, V = 5 ton
d θ
dV( θ )= 10 cos2 θ − 10 sen2 θ + 5 sen θ = 0
− (20 sen2 θ − 5 sen θ − 10) = 0
4 sen2 θ − sen θ − 2 = 0
sen θ =8
7.51+
sen θ = 0.84
θ = ang sen 0.8
θ =57º, 123º
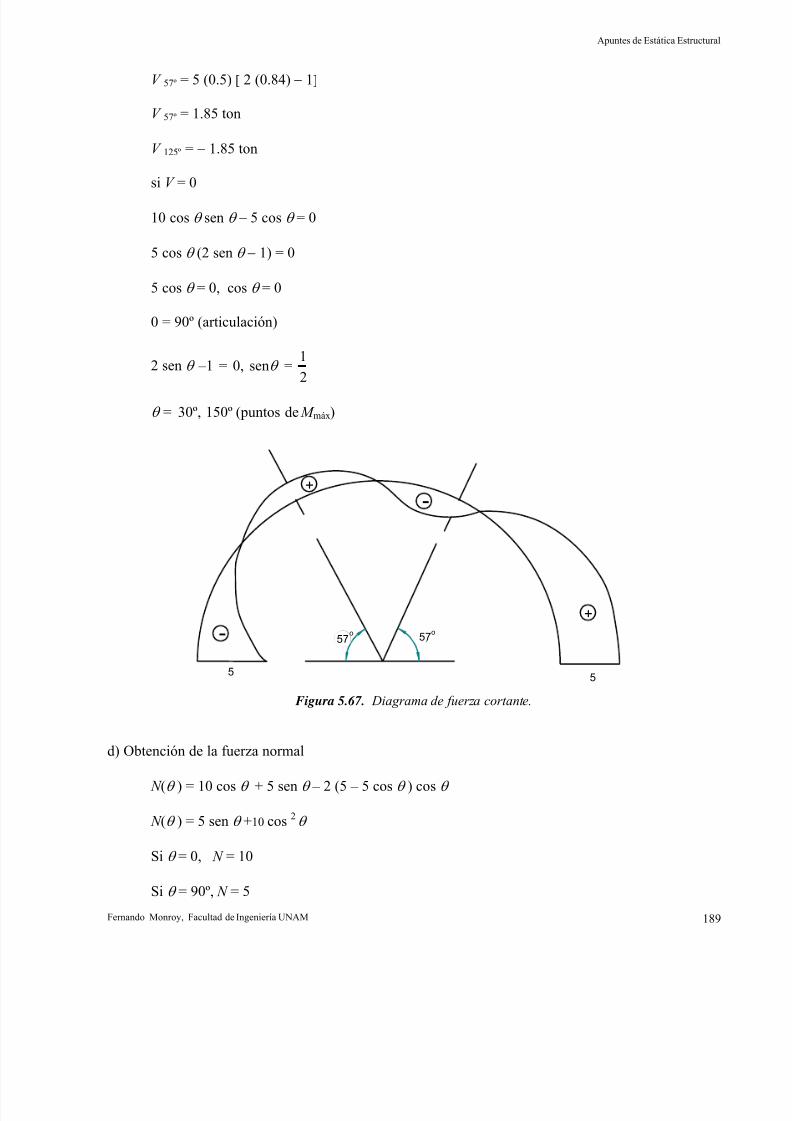
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 196/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 189
V 57º = 5 (0.5) [ 2 (0.84) − 1]
V 57º = 1.85 ton
V 125º = − 1.85 ton
si V = 0
10 cos θ sen θ − 5 cos θ = 0
5 cos θ (2 sen θ − 1) = 0
5 cos θ = 0, cos θ = 0
0 = 90º (articulación)
2 sen θ –1 = 0, senθ =2
1
θ = 30º, 150º (puntos de M máx)
5 5
-
+ o -
+
6 5 ° 57
6 2 ° 57
o
Figura 5.67. Diagrama de fuerza cortante.
d) Obtención de la fuerza normal
N (θ ) = 10 cos θ + 5 sen θ – 2 (5 – 5 cos θ ) cos θ
N (θ ) = 5 sen θ +10 cos 2 θ
Si θ = 0, N = 10
Si θ = 90º, N = 5
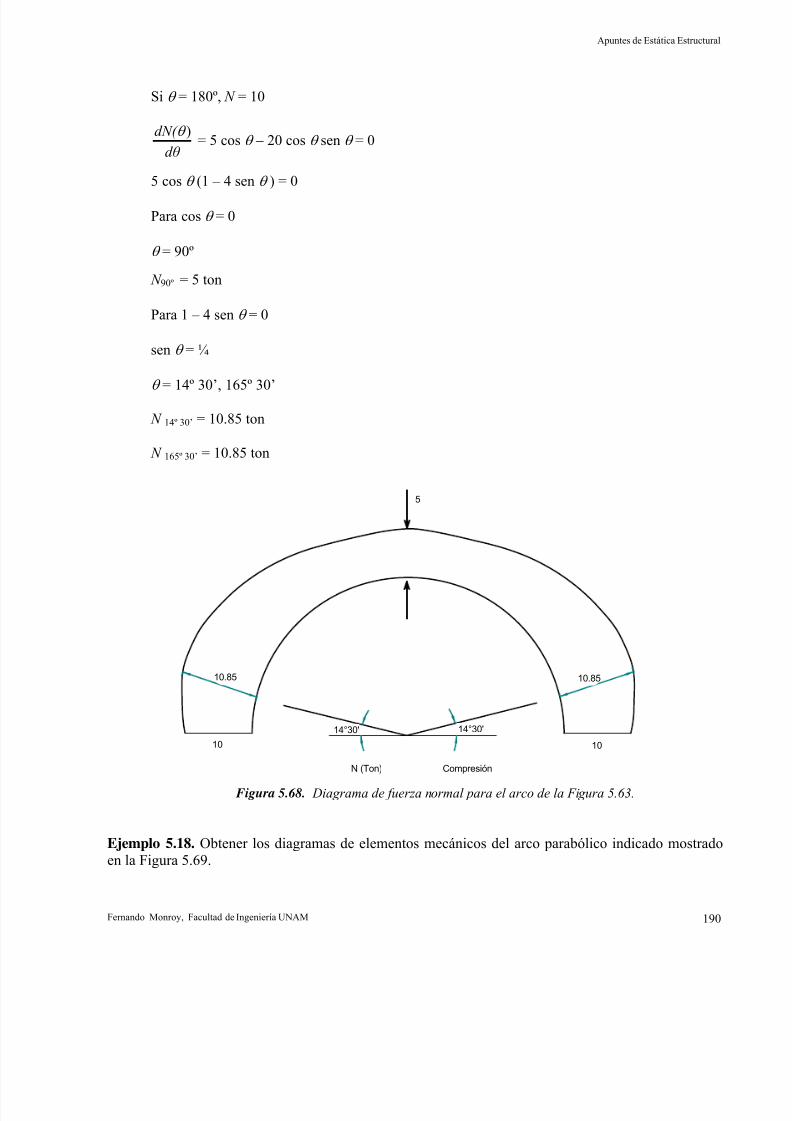
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 197/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 190
Si θ = 180º, N = 10
d θ
dN( )θ = 5 cos θ − 20 cos θ sen θ = 0
5 cosθ
(1 – 4 senθ
) = 0Para cos θ = 0
θ = 90º
N 90º = 5 ton
Para 1 – 4 sen θ = 0
sen θ = ¼
θ = 14º 30’, 165º 30’
N 14º 30’ = 10.85 ton
N 165º 30’ = 10.85 ton
10
5
N (Ton)
10
Compresión
1 4 °
1 4 ° 14°30'14°30'
3 510.853 5 10.85
Figura 5.68. Diagrama de fuerza normal para el arco de la Figura 5.63.
Ejemplo 5.18. Obtener los diagramas de elementos mecánicos del arco parabólico indicado mostradoen la Figura 5.69.
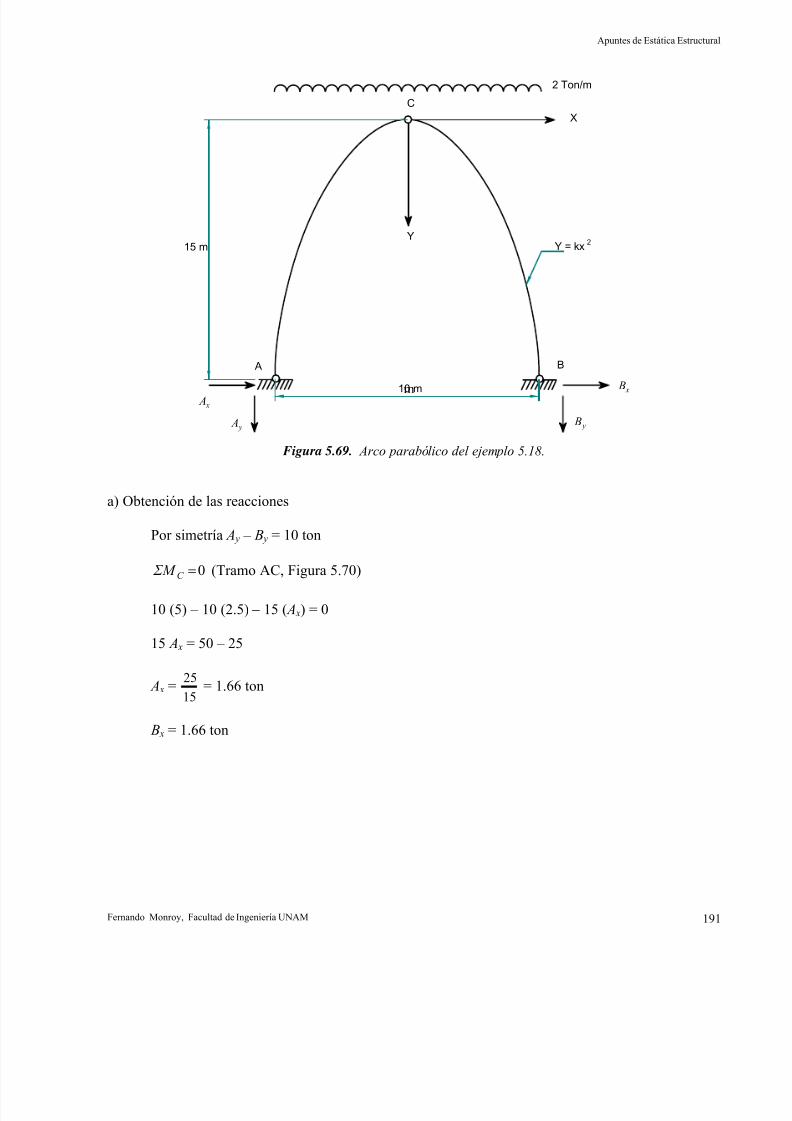
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 198/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 191
A
2 Ton/m
B
X
Y Y = kx 2
C
1 0 2 15 m
104m10 m x B
y B
x A
y A
Figura 5.69. Arco parabólico del ejemplo 5.18.
a) Obtención de las reacciones
Por simetría A y – B y = 10 ton
0=C Σ M (Tramo AC, Figura 5.70)
10 (5) – 10 (2.5) − 15 ( A x) = 0
15 A x = 50 – 25
A x =15
25= 1.66 ton
B x = 1.66 ton

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 199/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 192
2 Ton/m
10 Ton
1 0 1 15 m
27m2.5 m
66.1= x A
Ton10= y A54m5 m
xC
yC
Figura 5.70. D.C.L. parte AC del arco parabólico.
2 Ton/m
B
X
Y
10 Ton
1.66 Ton
10 Ton
A1.66 Ton
y
θ
C
1 1 1
29
104
x
10 m
5 9 ° θ
15 m 245 - x
Figura 5.71. Reacciones y sistema coordenado para el arco del ejemplo 5.18.
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 200/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 193
Ecuación de la curvaY = K x
2
Sustituyendo las coordenadas del punto B
15 = K (5)2
K = 15/25
K = 0.6
Por lo que
Y = 0.6 x2
dx
dyθ =tan
x.dx
dy21=
tan θ = 1.2 x
2.1
θtan= x
b) Obtención del momento flexionante
M ( x) = 10 (5 – x) – 1.66 (15 – y) – 2 (5 – x) )2
5( x−
Como y = 0.6 x2
M ( x) = 10 (5 – x) – 1.66 (15 – 0.6 x2) – (5 – x) 2
M ( x) = 50 – 10 x – 25 + x2 – 25 + 10 x – x2
M = 0
Es decir no hay momento flexionante
c) Obtención de la fuerza cortante
V( x) = 10 cos θ − 1.66 sen θ − 2 (5 − x) cos θ
V( x) = 10 cos θ − 1.66 sen θ − 10 cos θ + 2 x cos θ
V = 2 x cos θ –1.66 sen θ

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 201/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 194
Como x =2.1
tanθ
V = 22.1
tanθ cos θ − 1.66 sen θ
V = 1.66 sen θ − 1.66 sen θ
V = 0; Tampoco se presenta fuerza cortante
d) Obtención de la fuerza normal
N = 10 sen θ + 1.66 cos θ − 2 (5 – x) sen θ
N = 10 sen θ + 1.66 cos θ − 10 sen θ + 2 x sen θ
N = 1.66 cos θ + 21.2
tanθ sen θ
N = 1.66 cos θ + 1.66θ
θ sen
cos
2
N = 1.66 )cos
cos(
22
θ
θ senθ +
N =θ cos
66.1
Si θ = 0o, N = 1.66 ton
tan θ = 1.2 x
Si x = 5, tan θ = 0, θ = 80º 30’
;169.0
66.1
)'3080(cos
66.1o
== N N = 10.1 Ton
0cos
sen66.12
==θ
θ
d θ dM
sen θ = 0, θ = 0º ; N min = 1.66 ton
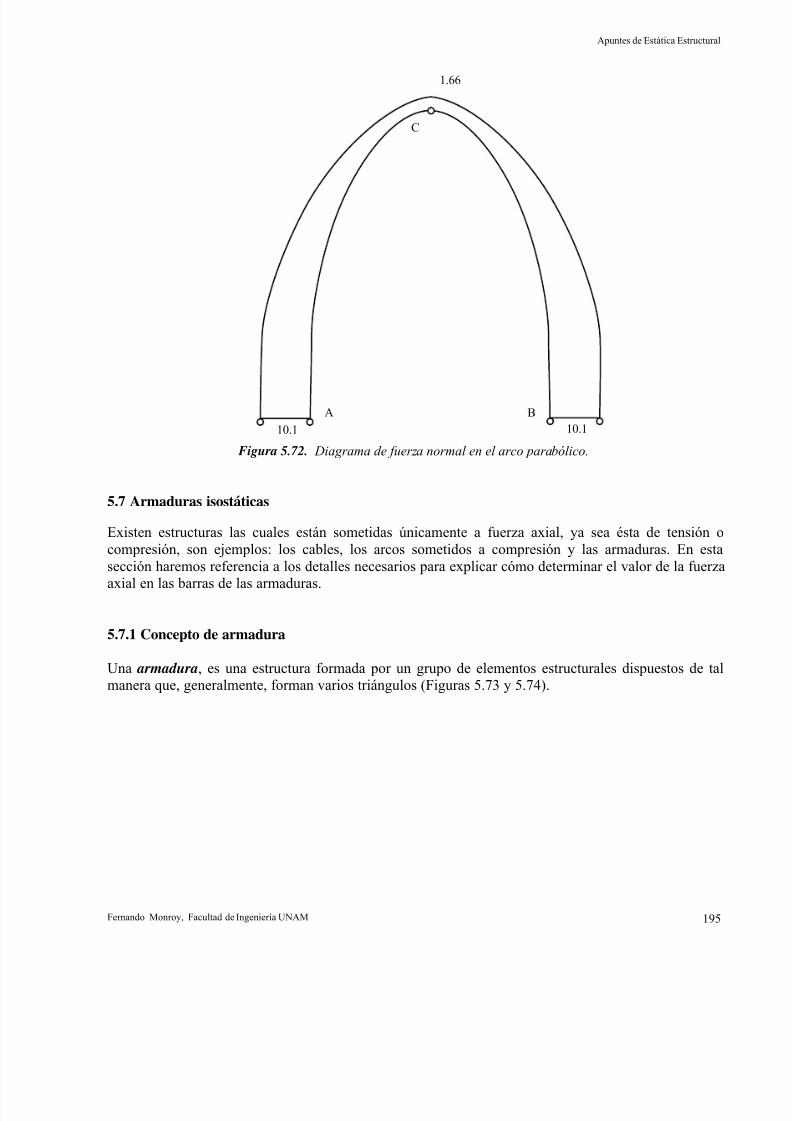
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 202/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 195
1.66
A B 10.1
C
10.1
Figura 5.72. Diagrama de fuerza normal en el arco parabólico.
5.7 Armaduras isostáticas
Existen estructuras las cuales están sometidas únicamente a fuerza axial, ya sea ésta de tensión ocompresión, son ejemplos: los cables, los arcos sometidos a compresión y las armaduras. En esta
sección haremos referencia a los detalles necesarios para explicar cómo determinar el valor de la fuerzaaxial en las barras de las armaduras.
5.7.1 Concepto de armadura
Una armadura, es una estructura formada por un grupo de elementos estructurales dispuestos de talmanera que, generalmente, forman varios triángulos (Figuras 5.73 y 5.74).
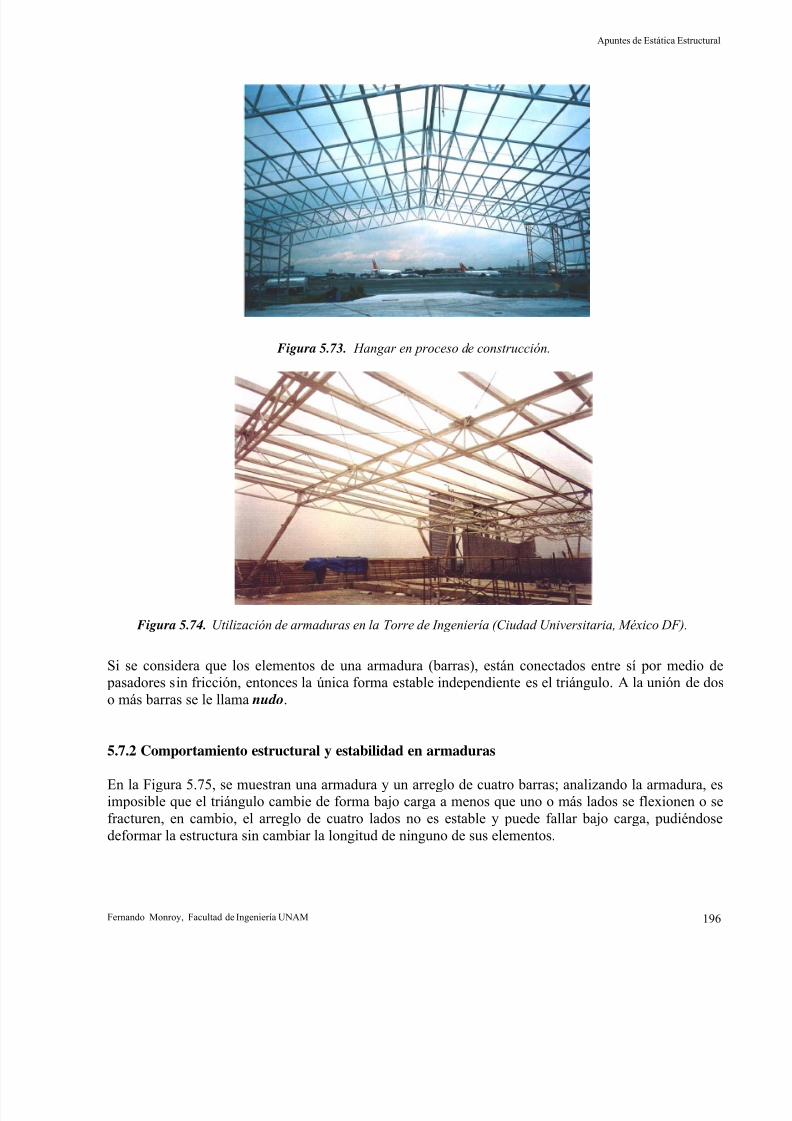
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 203/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 196
Figura 5.73. Hangar en proceso de construcción.
Figura 5.74. Utilización de armaduras en la Torre de Ingeniería (Ciudad Universitaria, México DF).
Si se considera que los elementos de una armadura (barras), están conectados entre sí por medio de pasadores sin fricción, entonces la única forma estable independiente es el triángulo. A la unión de doso más barras se le llama nudo.
5.7.2 Comportamiento estructural y estabilidad en armaduras
En la Figura 5.75, se muestran una armadura y un arreglo de cuatro barras; analizando la armadura, esimposible que el triángulo cambie de forma bajo carga a menos que uno o más lados se flexionen o sefracturen, en cambio, el arreglo de cuatro lados no es estable y puede fallar bajo carga, pudiéndosedeformar la estructura sin cambiar la longitud de ninguno de sus elementos.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 204/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 197
P
P P
Figura 5.75. Estabilidad en arreglos de barras.
5.7.3 Elementos constitutivos de una armadura
Los elementos de una armadura pueden estar fabricados de acero o madera, y las uniones pueden serremachadas, soldadas, atornilladas o de tipo mixto.
En una armadura, cada una de sus partes recibe un nombre específico que depende de la posición ofunción que realizan. Estos nombres se mencionan a continuación y se ejemplifican en la Figura 5.76También podemos ver un ejemplo de armadura en la Figura 5.77.
1. Cuerdas: son las barras que forman el perímetro de la armadura y a su vez se subdividen en
cuerdas superiores y cuerdas inferiores.
2. Montantes o verticales: son las barras que tienen una orientación vertical.
3. Diagonales: son las barras que, como su nombre lo dice, se encuentran orientadasdiagonalmente.

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 205/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 198
CUERDA SUPERIOR
MONTANTES
TRIANGULOS
DIAGONALES
CUERDA INFERIOR APOYO
NUDO ARTICULADO
BARRAS
Figura 5.76. Elementos de una armadura.
Figura 5.77. Armadura utilizada en los trabajos finales de la coronación de la cortina de la Presa Zimapán(referencia 7).
5.7.4 Hipótesis para el análisis de armaduras
Para simplificar el análisis de las armaduras pueden hacerse las siguientes hipótesis:
1. Los elementos de las armaduras están conectados por medio de pasadores sin fricción.
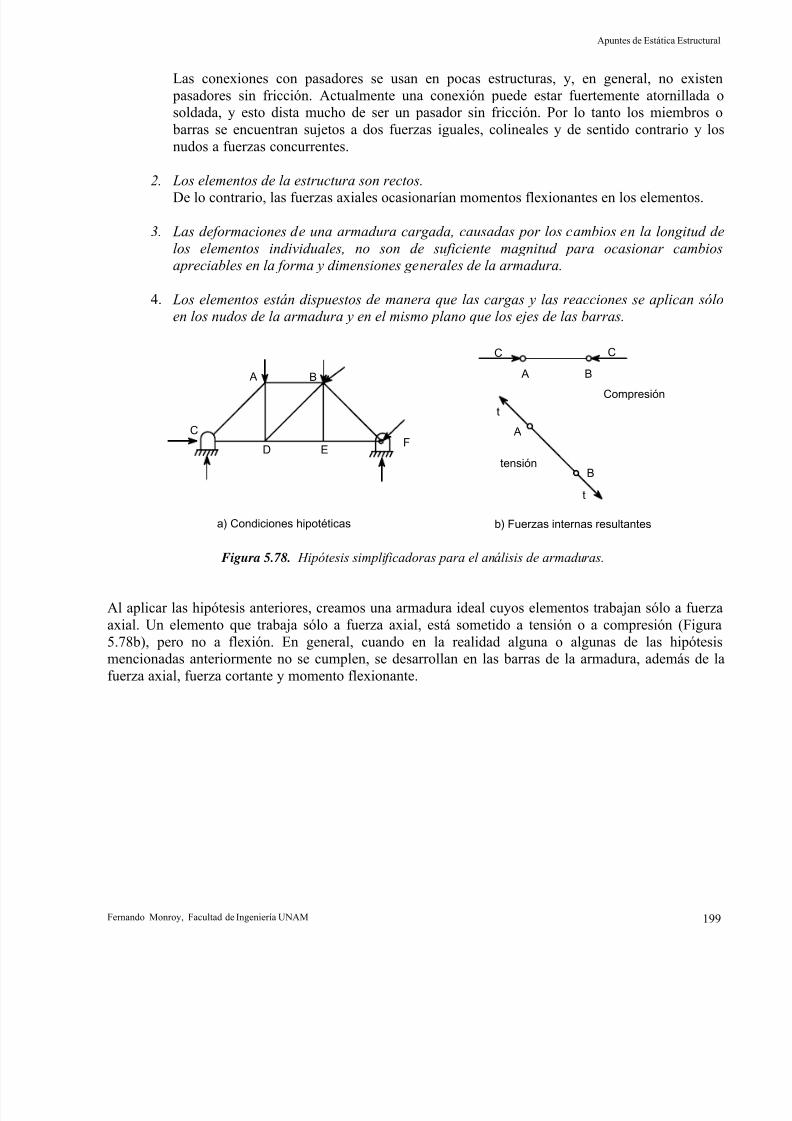
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 206/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 199
Las conexiones con pasadores se usan en pocas estructuras, y, en general, no existen pasadores sin fricción. Actualmente una conexión puede estar fuertemente atornillada osoldada, y esto dista mucho de ser un pasador sin fricción. Por lo tanto los miembros o barras se encuentran sujetos a dos fuerzas iguales, colineales y de sentido contrario y losnudos a fuerzas concurrentes.
2.
Los elementos de la estructura son rectos.De lo contrario, las fuerzas axiales ocasionarían momentos flexionantes en los elementos.
3. Las deformaciones de una armadura cargada, causadas por los cambios en la longitud de
los elementos individuales, no son de suficiente magnitud para ocasionar cambiosapreciables en la forma y dimensiones generales de la armadura.
4. Los elementos están dispuestos de manera que las cargas y las reacciones se aplican sóloen los nudos de la armadura y en el mismo plano que los ejes de las barras.
A B
D E
CF
A
B
t
t
A
C
B
C
a) Condiciones hipotéticas
Compresión
tensión
b) Fuerzas internas resultantes
Figura 5.78. Hipótesis simplificadoras para el análisis de armaduras.
Al aplicar las hipótesis anteriores, creamos una armadura ideal cuyos elementos trabajan sólo a fuerzaaxial. Un elemento que trabaja sólo a fuerza axial, está sometido a tensión o a compresión (Figura5.78b), pero no a flexión. En general, cuando en la realidad alguna o algunas de las hipótesismencionadas anteriormente no se cumplen, se desarrollan en las barras de la armadura, además de lafuerza axial, fuerza cortante y momento flexionante.
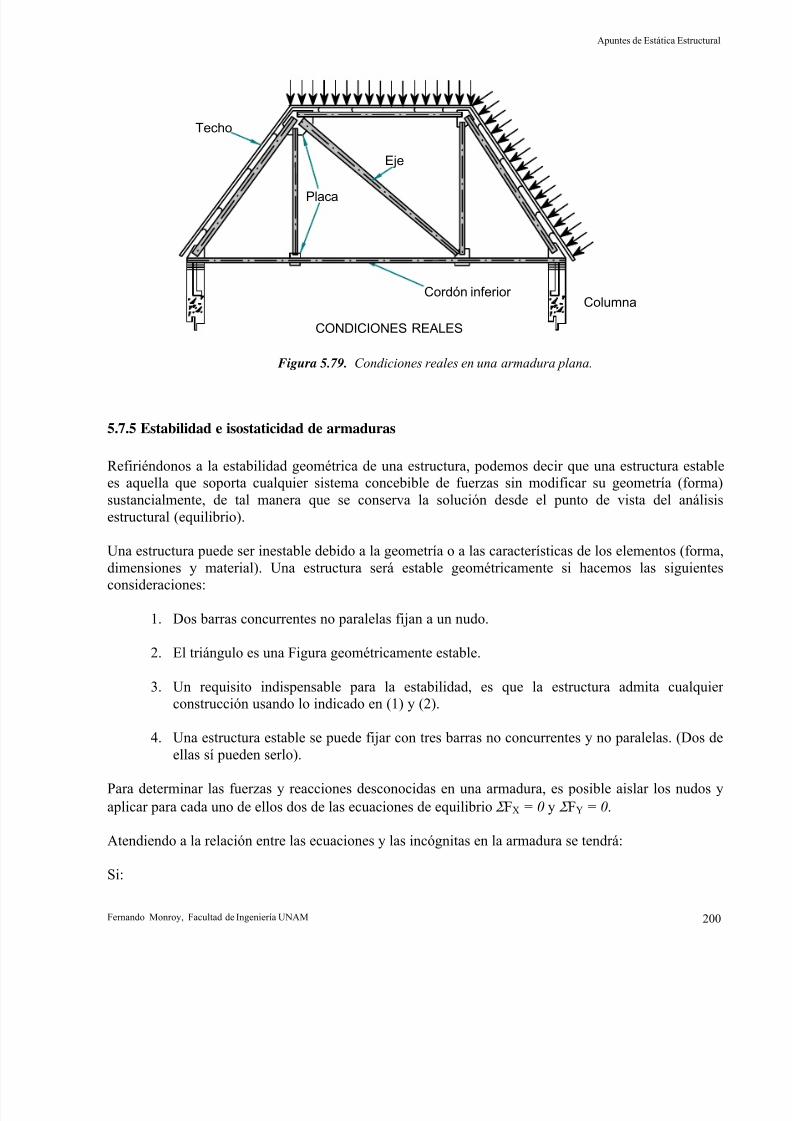
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 207/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 200
CONDICIONES REALES
Columna
Techo
Placa
Cordón inferior
Eje
Figura 5.79. Condiciones reales en una armadura plana.
5.7.5 Estabilidad e isostaticidad de armaduras
Refiriéndonos a la estabilidad geométrica de una estructura, podemos decir que una estructura establees aquella que soporta cualquier sistema concebible de fuerzas sin modificar su geometría (forma)sustancialmente, de tal manera que se conserva la solución desde el punto de vista del análisisestructural (equilibrio).
Una estructura puede ser inestable debido a la geometría o a las características de los elementos (forma,
dimensiones y material). Una estructura será estable geométricamente si hacemos las siguientesconsideraciones:
1. Dos barras concurrentes no paralelas fijan a un nudo.
2. El triángulo es una Figura geométricamente estable.
3. Un requisito indispensable para la estabilidad, es que la estructura admita cualquierconstrucción usando lo indicado en (1) y (2).
4. Una estructura estable se puede fijar con tres barras no concurrentes y no paralelas. (Dos de
ellas sí pueden serlo).
Para determinar las fuerzas y reacciones desconocidas en una armadura, es posible aislar los nudos yaplicar para cada uno de ellos dos de las ecuaciones de equilibrio Σ FX = 0 y Σ FY = 0.
Atendiendo a la relación entre las ecuaciones y las incógnitas en la armadura se tendrá:
Si:
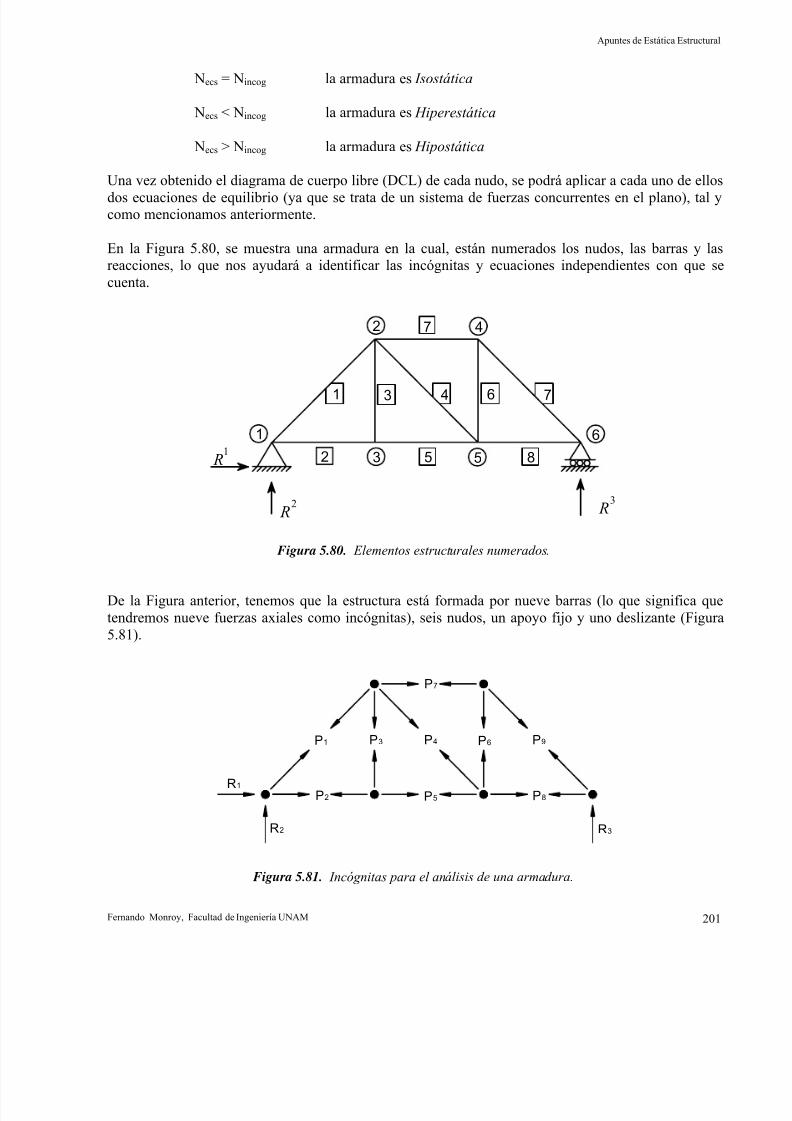
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 208/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 201
Necs = Nincog la armadura es Isostática
Necs < Nincog la armadura es Hiperestática
Necs > Nincog la armadura es Hipostática
Una vez obtenido el diagrama de cuerpo libre (DCL) de cada nudo, se podrá aplicar a cada uno de ellosdos ecuaciones de equilibrio (ya que se trata de un sistema de fuerzas concurrentes en el plano), tal ycomo mencionamos anteriormente.
En la Figura 5.80, se muestra una armadura en la cual, están numerados los nudos, las barras y lasreacciones, lo que nos ayudará a identificar las incógnitas y ecuaciones independientes con que secuenta.
2 4
43 61
6
7
5 5
7
1
321 R
2 R
8
3 R
Figura 5.80. Elementos estructurales numerados.
De la Figura anterior, tenemos que la estructura está formada por nueve barras (lo que significa quetendremos nueve fuerzas axiales como incógnitas), seis nudos, un apoyo fijo y uno deslizante (Figura5.81).
R1
R2 R3
P9
P7
P4P3
P5
P1 P6
P8P2
Figura 5.81. Incógnitas para el análisis de una armadura.
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 209/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 202
Con relación a la Figura 5.81, observamos que tenemos tres reacciones como incógnitas y tambiénnueve fuerzas axiales (P1, P2, . . . , P9).
Si N N es igual al número de nudos, entonces:
Ecs = 2 N N (Estática, ΣFX, ΣFY)
Por lo que si:
2N N = NB + NR la armadura es isostática
2N N < NB + NR la armadura es hiperestática
2N N > NB + NR la armadura es hipostática (inestable)
Donde:
NB = número de barras NR = número de reacciones
Cabe recordar que, una fuerza axial con signo positivo (+) será de tensión (aumento de longitud delelemento), y una fuerza axial negativa (–) será de compresión (disminución de la longitud delelemento).
Es posible encontrar armaduras que tengan muchas barras y que no puedan analizarse por estática, encuyo caso serán indeterminadas, por lo que NB excederá a 2N N – NR entonces habrá más barras que lasabsolutamente necesarias para cumplir las condiciones de equilibrio estático. Las barras adicionales sellaman redundantes. Sin embargo, la condición de isostaticidad no es suficiente para que una armadurasea geométricamente estable.
En la Figura 5.82, se analiza la determinación estática de diferentes armaduras, y se especifica si se tratade una armadura isostática, hiperestática o hipostática.
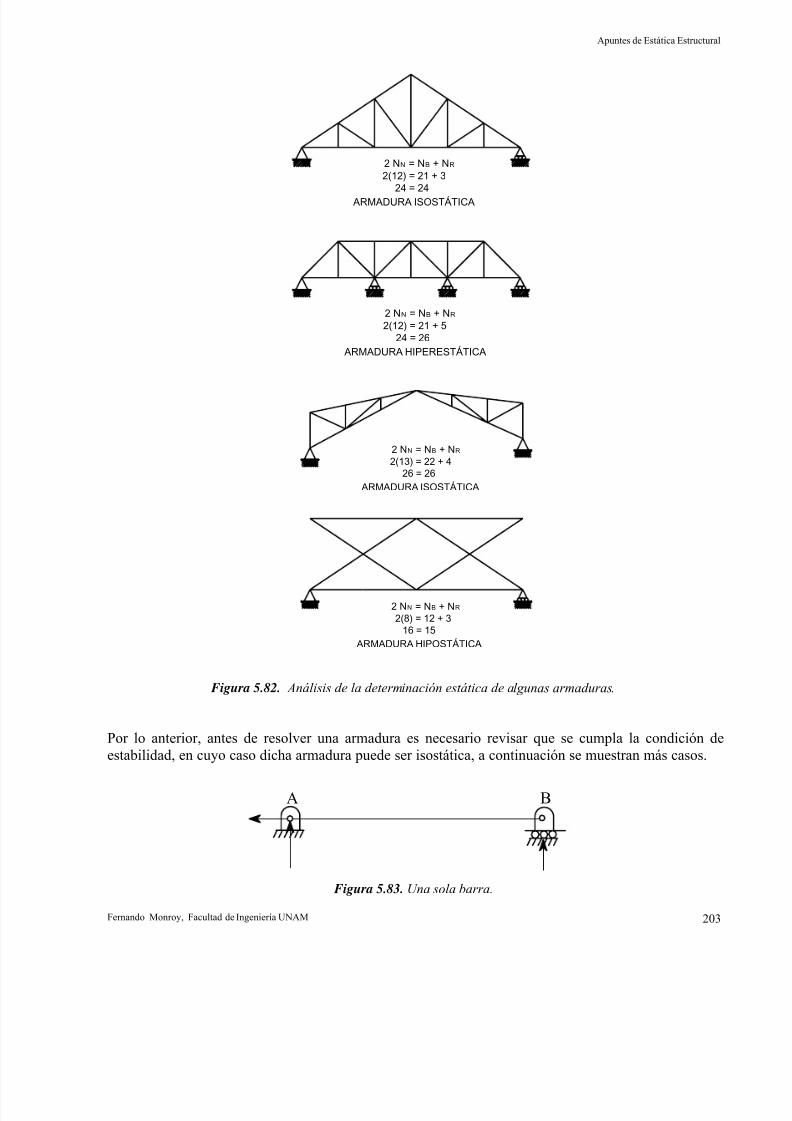
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 210/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 203
2 NN = NB + NR
2(12) = 21 + 3
24 = 24ARMADURA ISOSTÁTICA
ARMADURA HIPERESTÁTICA24 = 26
2(12) = 21 + 5BN = N2 N R+ N
ARMADURA ISOSTÁTICA
BN = N2 N R+ N2(13) = 22 + 4
26 = 26
ARMADURA HIPOSTÁTICA
2 N2(8) = 12 + 3
16 = 15
BN = N R+ N
Figura 5.82. Análisis de la determinación estática de algunas armaduras.
Por lo anterior, antes de resolver una armadura es necesario revisar que se cumpla la condición de
estabilidad, en cuyo caso dicha armadura puede ser isostática, a continuación se muestran más casos.
BA
Figura 5.83. Una sola barra.
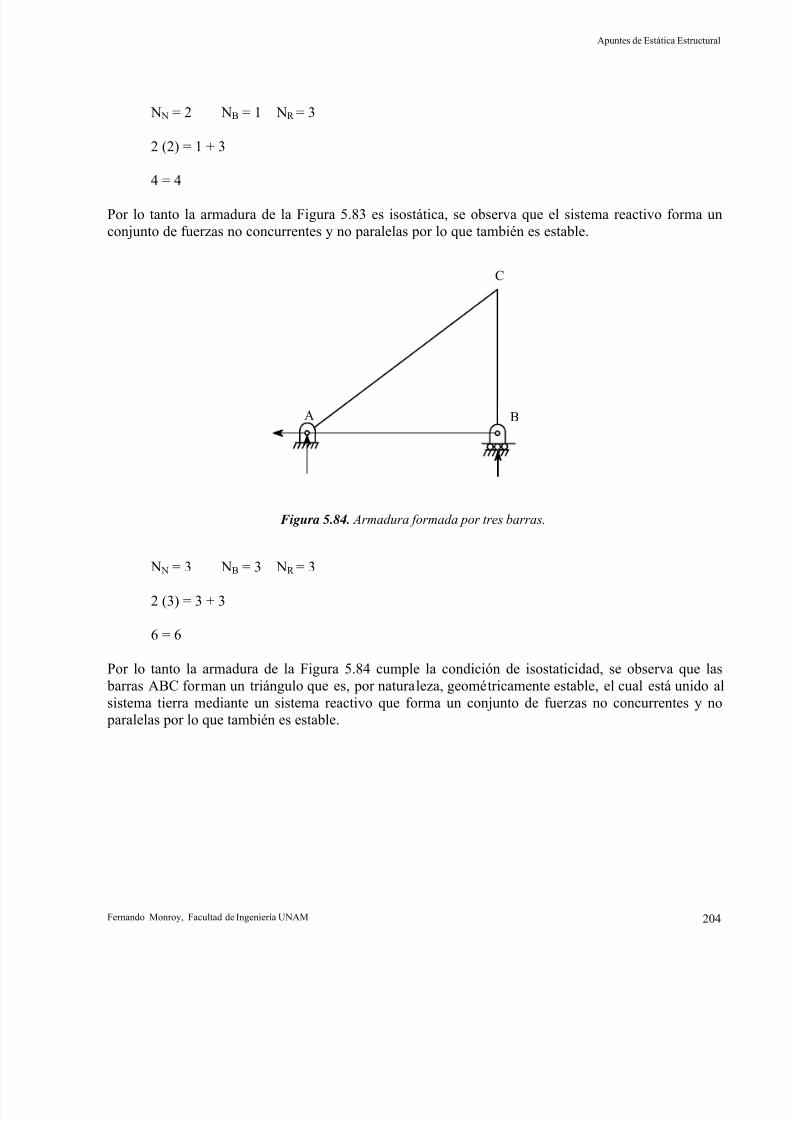
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 211/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 204
N N = 2 NB = 1 NR = 3
2 (2) = 1 + 3
4 = 4Por lo tanto la armadura de la Figura 5.83 es isostática, se observa que el sistema reactivo forma unconjunto de fuerzas no concurrentes y no paralelas por lo que también es estable.
Figura 5.84. Armadura formada por tres barras.
N N = 3 NB = 3 NR = 3
2 (3) = 3 + 3
6 = 6
Por lo tanto la armadura de la Figura 5.84 cumple la condición de isostaticidad, se observa que las barras ABC forman un triángulo que es, por naturaleza, geométricamente estable, el cual está unido alsistema tierra mediante un sistema reactivo que forma un conjunto de fuerzas no concurrentes y no paralelas por lo que también es estable.
BA
C
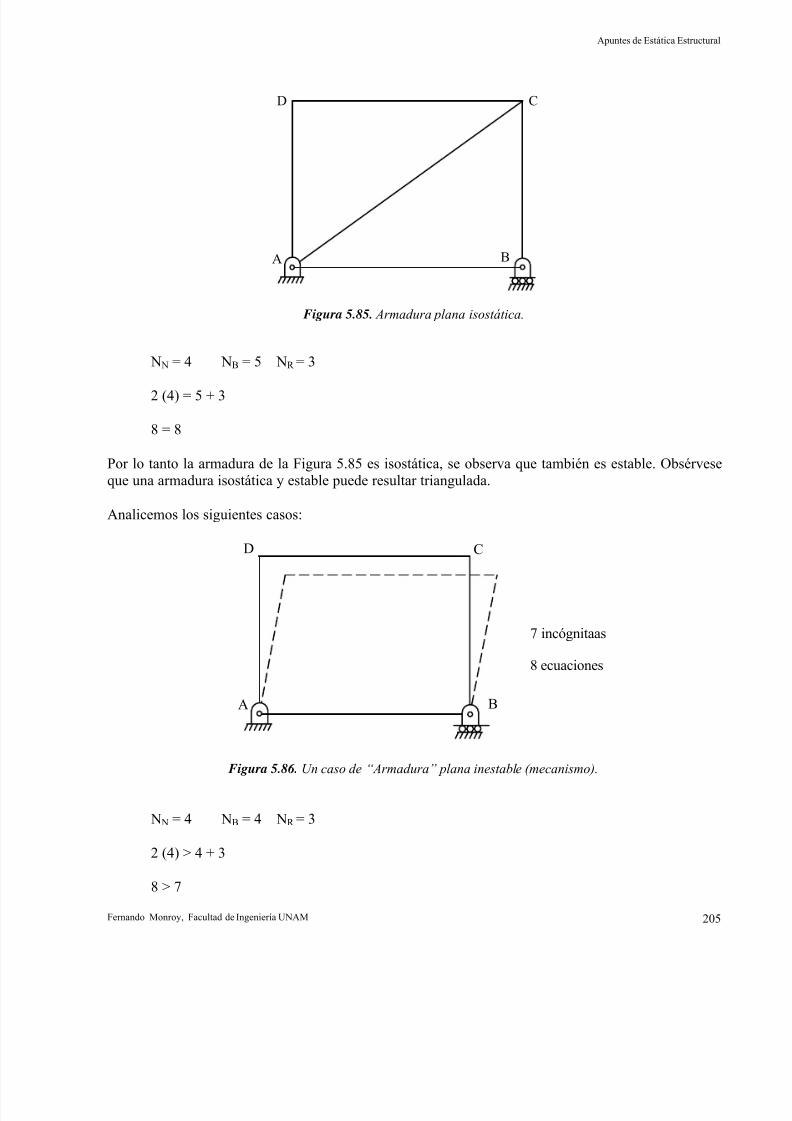
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 212/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 205
Figura 5.85. Armadura plana isostática.
N N = 4 NB = 5 NR = 3
2 (4) = 5 + 3
8 = 8
Por lo tanto la armadura de la Figura 5.85 es isostática, se observa que también es estable. Obsérveseque una armadura isostática y estable puede resultar triangulada.
Analicemos los siguientes casos:
Figura 5.86. Un caso de “Armadura” plana inestable (mecanismo).
N N = 4 NB = 4 NR = 3
2 (4) > 4 + 3
8 > 7
BA
CD
BA
CD
7 incógnitaas
8 ecuaciones
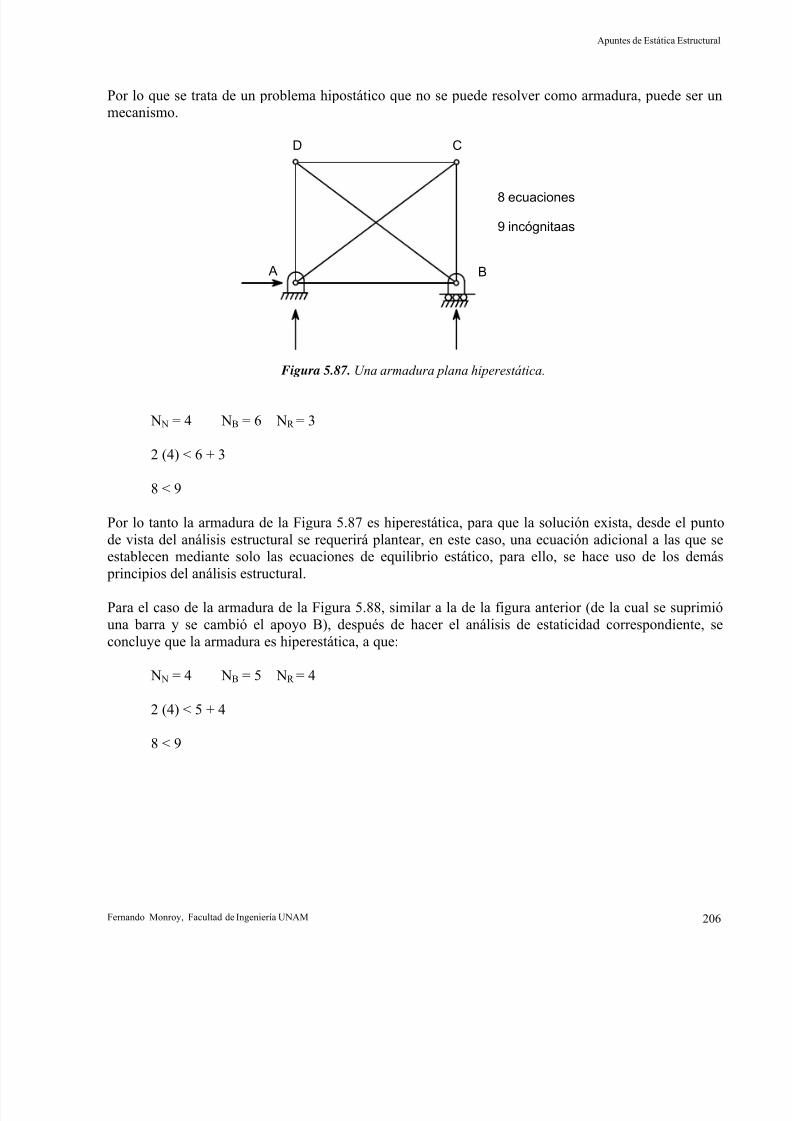
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 213/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 206
Por lo que se trata de un problema hipostático que no se puede resolver como armadura, puede ser unmecanismo.
BA
CD
8 ecuaciones
9 incógnitaas
Figura 5.87. Una armadura plana hiperestática.
N N = 4 NB = 6 NR = 3
2 (4) < 6 + 3
8 < 9
Por lo tanto la armadura de la Figura 5.87 es hiperestática, para que la solución exista, desde el puntode vista del análisis estructural se requerirá plantear, en este caso, una ecuación adicional a las que se
establecen mediante solo las ecuaciones de equilibrio estático, para ello, se hace uso de los demás principios del análisis estructural.
Para el caso de la armadura de la Figura 5.88, similar a la de la figura anterior (de la cual se suprimióuna barra y se cambió el apoyo B), después de hacer el análisis de estaticidad correspondiente, seconcluye que la armadura es hiperestática, a que:
N N = 4 NB = 5 NR = 4
2 (4) < 5 + 4
8 < 9
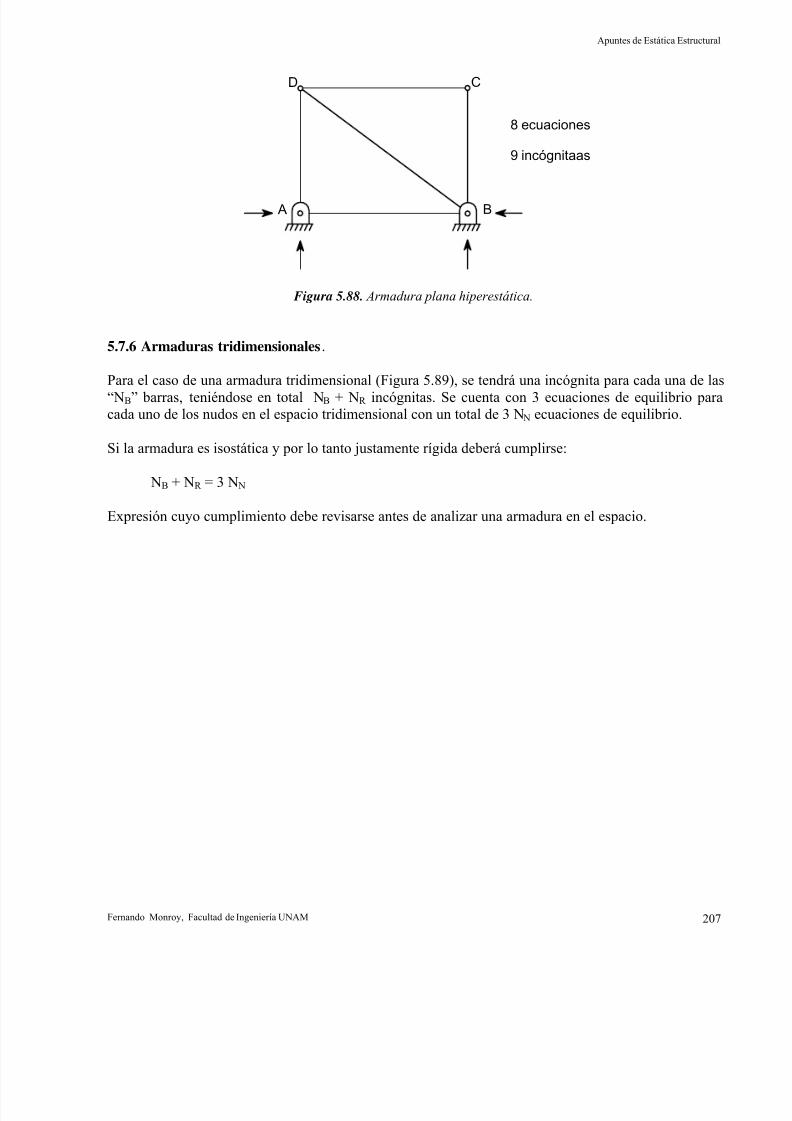
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 214/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 207
BA
CD
8 ecuaciones
9 incógnitaas
Figura 5.88. Armadura plana hiperestática.
5.7.6 Armaduras tridimensionales.
Para el caso de una armadura tridimensional (Figura 5.89), se tendrá una incógnita para cada una de las“NB” barras, teniéndose en total NB + NR incógnitas. Se cuenta con 3 ecuaciones de equilibrio paracada uno de los nudos en el espacio tridimensional con un total de 3 N N ecuaciones de equilibrio.
Si la armadura es isostática y por lo tanto justamente rígida deberá cumplirse:
NB + NR = 3 N N
Expresión cuyo cumplimiento debe revisarse antes de analizar una armadura en el espacio.
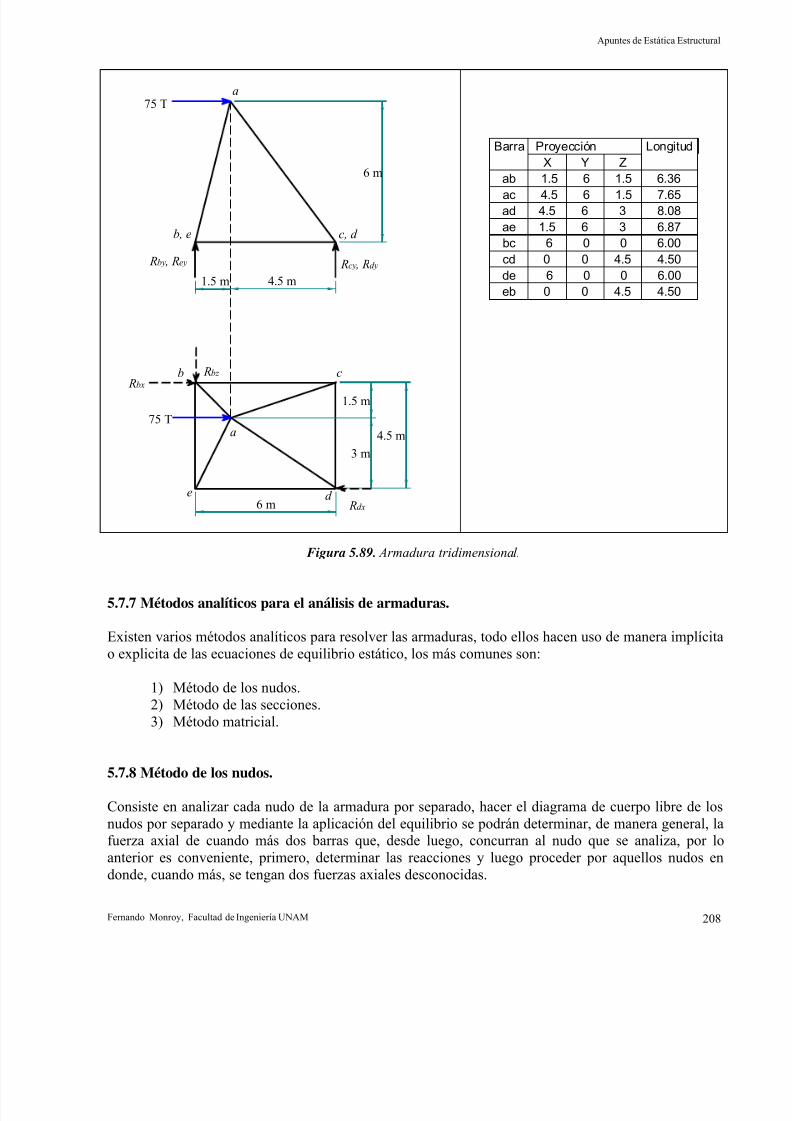
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 215/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 208
6 0
15 45
75 Ta
6 m
1.5 m 4.5 m
1 5
3 0
4 5
75 Ta
e
1.5 m
3 m
4.5 m
606 md
b c
b, e
Rby , Rey
c, d
Rcy , Rdy
Rbz
Rdx
Rbx
Barra Proyección Longitud X Y Z
ab 1.5 6 1.5 6.36ac 4.5 6 1.5 7.65ad 4.5 6 3 8.08ae 1.5 6 3 6.87bc 6 0 0 6.00cd 0 0 4.5 4.50de 6 0 0 6.00eb 0 0 4.5 4.50
Figura 5.89. Armadura tridimensional.
5.7.7 Métodos analíticos para el análisis de armaduras.
Existen varios métodos analíticos para resolver las armaduras, todo ellos hacen uso de manera implícitao explicita de las ecuaciones de equilibrio estático, los más comunes son:
1) Método de los nudos.2) Método de las secciones.3) Método matricial.
5.7.8 Método de los nudos.
Consiste en analizar cada nudo de la armadura por separado, hacer el diagrama de cuerpo libre de losnudos por separado y mediante la aplicación del equilibrio se podrán determinar, de manera general, lafuerza axial de cuando más dos barras que, desde luego, concurran al nudo que se analiza, por loanterior es conveniente, primero, determinar las reacciones y luego proceder por aquellos nudos endonde, cuando más, se tengan dos fuerzas axiales desconocidas.
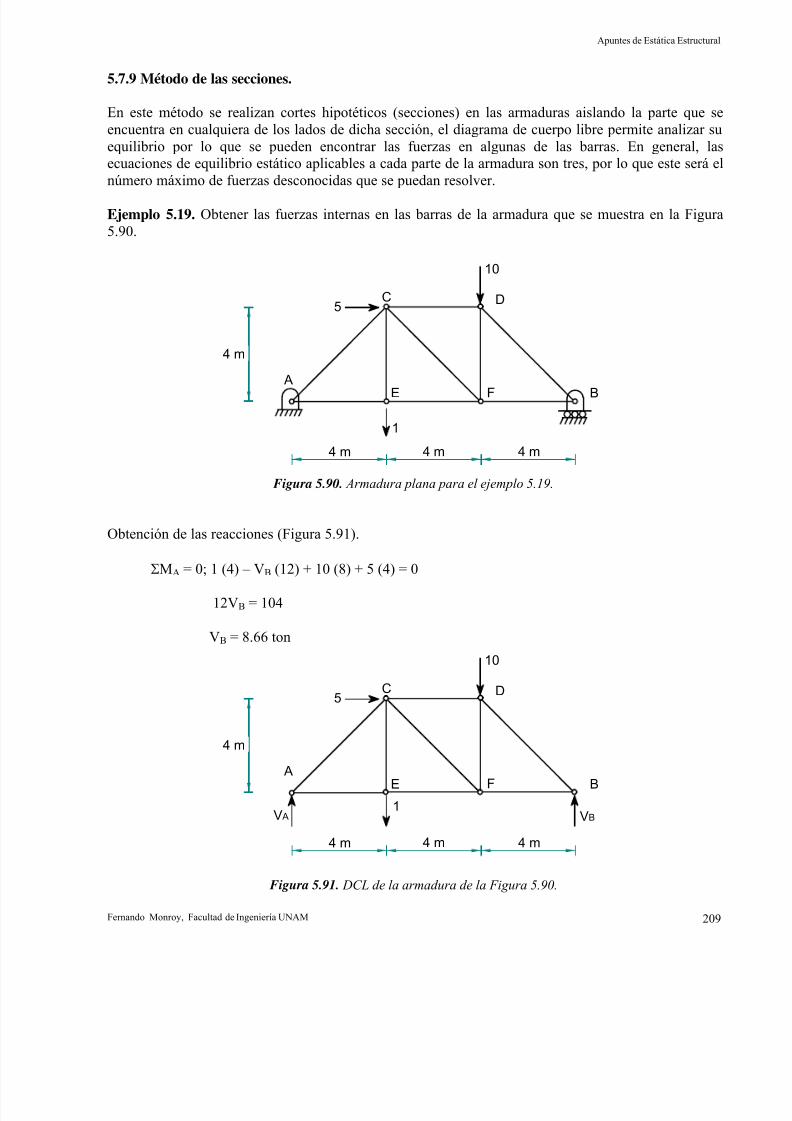
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 216/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 209
5.7.9 Método de las secciones.
En este método se realizan cortes hipotéticos (secciones) en las armaduras aislando la parte que seencuentra en cualquiera de los lados de dicha sección, el diagrama de cuerpo libre permite analizar suequilibrio por lo que se pueden encontrar las fuerzas en algunas de las barras. En general, lasecuaciones de equilibrio estático aplicables a cada parte de la armadura son tres, por lo que este será el
número máximo de fuerzas desconocidas que se puedan resolver.Ejemplo 5.19. Obtener las fuerzas internas en las barras de la armadura que se muestra en la Figura5.90.
C D
FEA
B
5
1
10
3 5 4 m
35 35 354 m 4 m 4 m
Figura 5.90. Armadura plana para el ejemplo 5.19.
Obtención de las reacciones (Figura 5.91).
ΣMA = 0; 1 (4) – VB (12) + 10 (8) + 5 (4) = 0
12VB = 104
VB = 8.66 ton
1VA VB
C D
FEA
B
5
10
3 5
4 m
35 35 354 m 4 m 4 m
Figura 5.91. DCL de la armadura de la Figura 5.90.
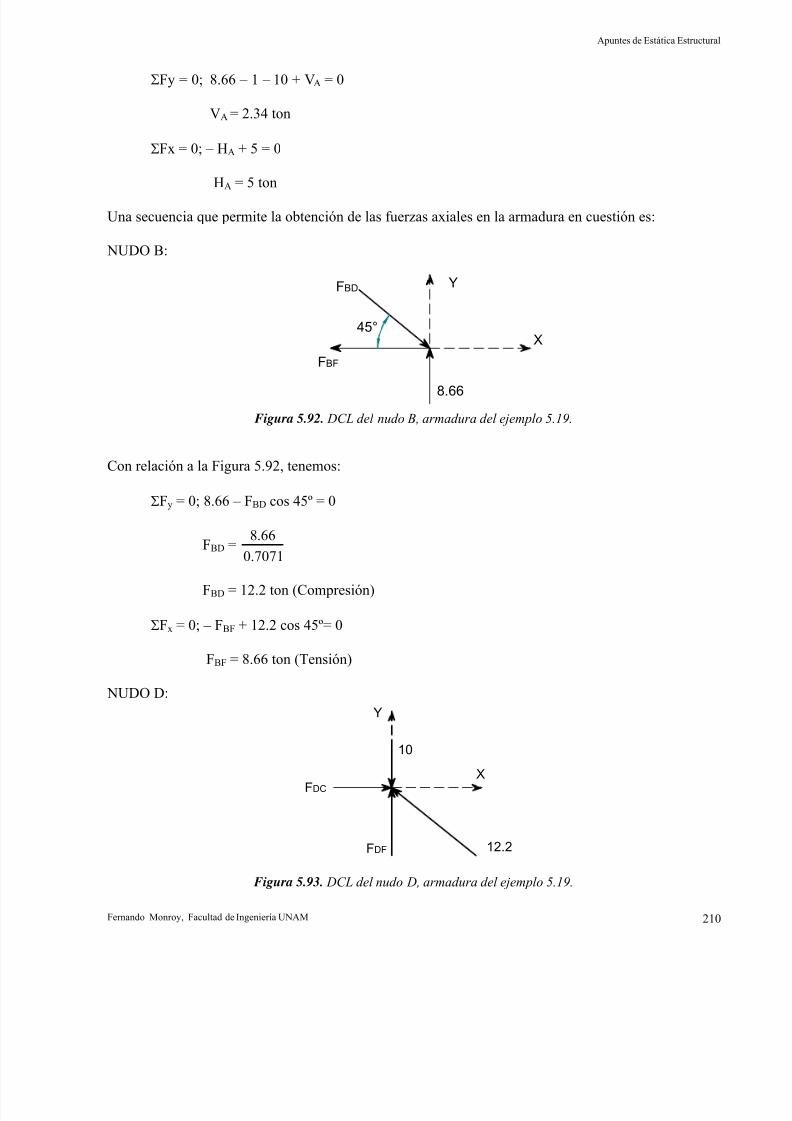
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 217/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 210
ΣFy = 0; 8.66 – 1 – 10 + VA = 0
VA = 2.34 ton
ΣFx = 0; – HA + 5 = 0
HA = 5 ton
Una secuencia que permite la obtención de las fuerzas axiales en la armadura en cuestión es:
NUDO B:
YFBD
X
FBF
8.66
3 9 °45°
Figura 5.92. DCL del nudo B, armadura del ejemplo 5.19.
Con relación a la Figura 5.92, tenemos:
ΣFy = 0; 8.66 – FBD cos 45º = 0
FBD =7071.0
66.8
FBD = 12.2 ton (Compresión)
ΣFx = 0; – FBF + 12.2 cos 45º= 0
FBF = 8.66 ton (Tensión)
NUDO D:Y
FDF
XFDC
12.2
10
Figura 5.93. DCL del nudo D, armadura del ejemplo 5.19.
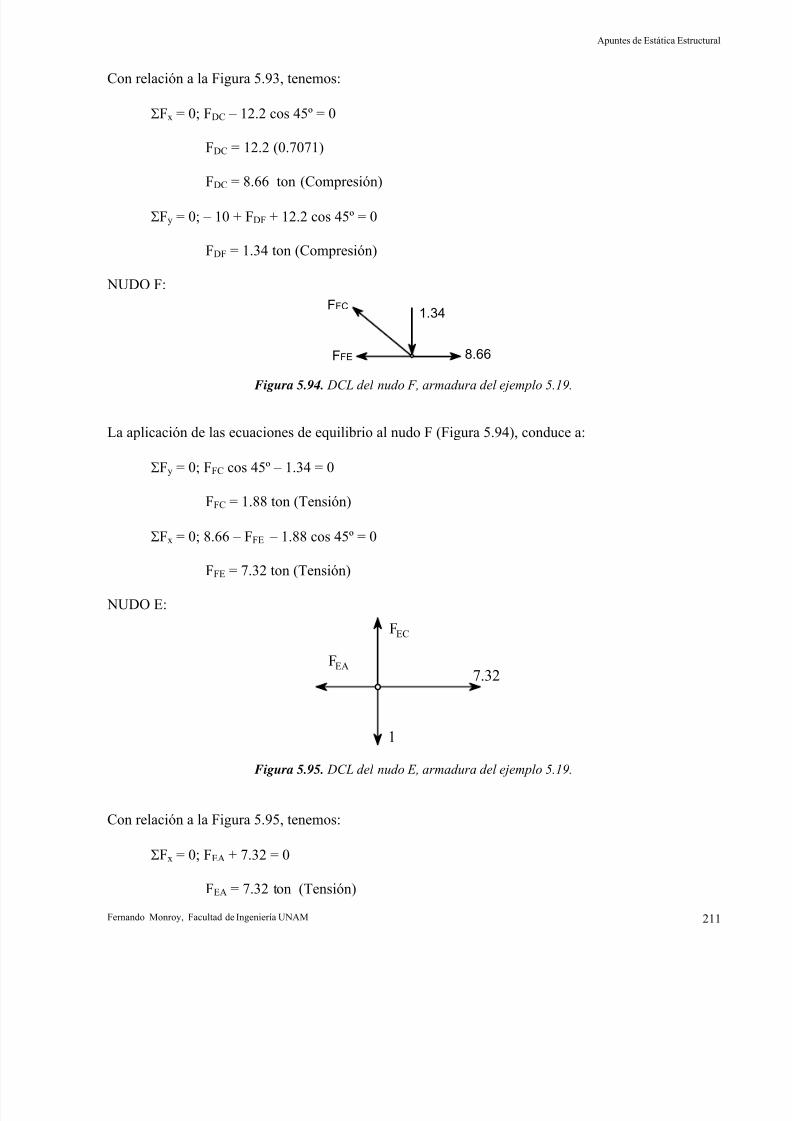
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 218/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 211
Con relación a la Figura 5.93, tenemos:
ΣFx = 0; FDC – 12.2 cos 45º = 0
FDC = 12.2 (0.7071)
FDC = 8.66 ton (Compresión)
ΣFy = 0; – 10 + FDF + 12.2 cos 45º = 0
FDF = 1.34 ton (Compresión)
NUDO F:FFC
FFE
1.34
8.66
Figura 5.94. DCL del nudo F, armadura del ejemplo 5.19.
La aplicación de las ecuaciones de equilibrio al nudo F (Figura 5.94), conduce a:
ΣFy = 0; FFC cos 45º – 1.34 = 0
FFC = 1.88 ton (Tensión)
ΣFx = 0; 8.66 – FFE – 1.88 cos 45º = 0
FFE = 7.32 ton (Tensión)
NUDO E:
7.32
1
ECF
EAF
Figura 5.95. DCL del nudo E, armadura del ejemplo 5.19.
Con relación a la Figura 5.95, tenemos:
ΣFx = 0; FEA + 7.32 = 0
FEA = 7.32 ton (Tensión)
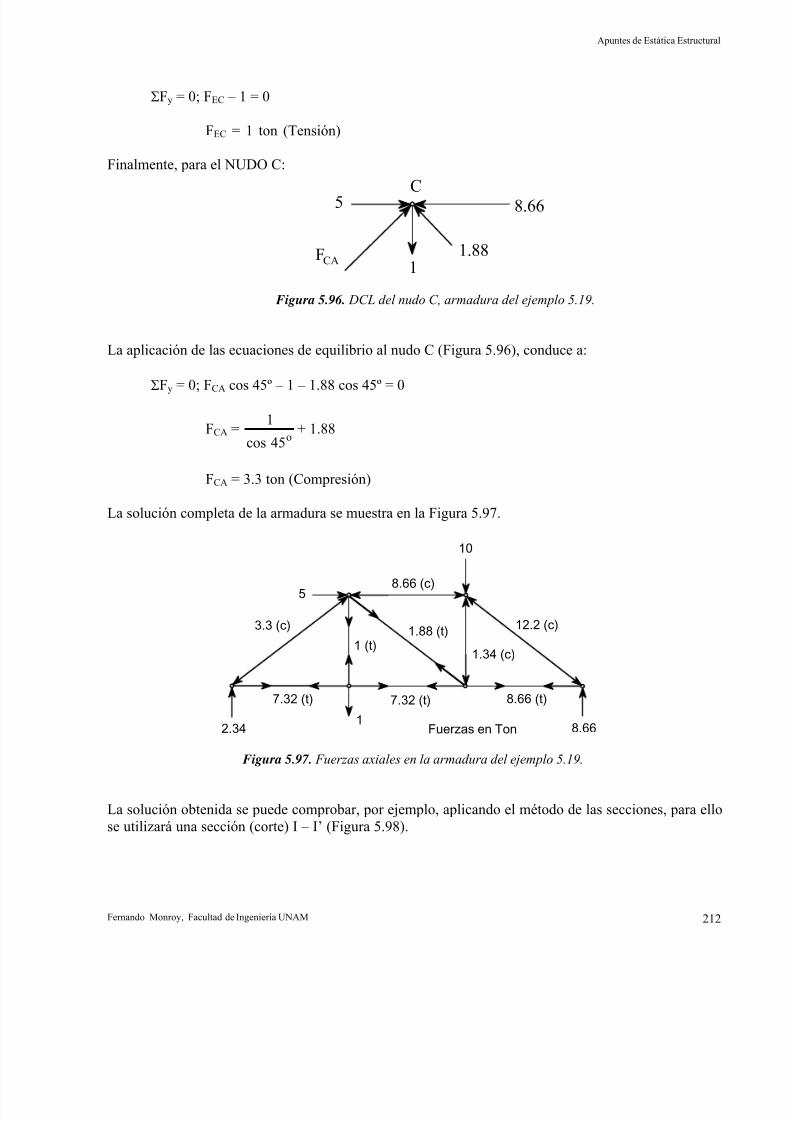
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 219/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 212
ΣFy = 0; FEC – 1 = 0
FEC = 1 ton (Tensión)
Finalmente, para el NUDO C:
C
1.88
8.66
1CAF
5
Figura 5.96. DCL del nudo C, armadura del ejemplo 5.19.
La aplicación de las ecuaciones de equilibrio al nudo C (Figura 5.96), conduce a:
ΣFy = 0; FCA cos 45º – 1 – 1.88 cos 45º = 0
FCA =o45cos
1+ 1.88
FCA = 3.3 ton (Compresión)
La solución completa de la armadura se muestra en la Figura 5.97.
8.66 (t)
8.66
12.2 (c)
1.34 (c)
1
1 (t)
2.34
7.32 (t)
5
Fuerzas en Ton
3.3 (c)
7.32 (t)
1.88 (t)
8.66 (c)
10
Figura 5.97. Fuerzas axiales en la armadura del ejemplo 5.19.
La solución obtenida se puede comprobar, por ejemplo, aplicando el método de las secciones, para ellose utilizará una sección (corte) I – I’ (Figura 5.98).
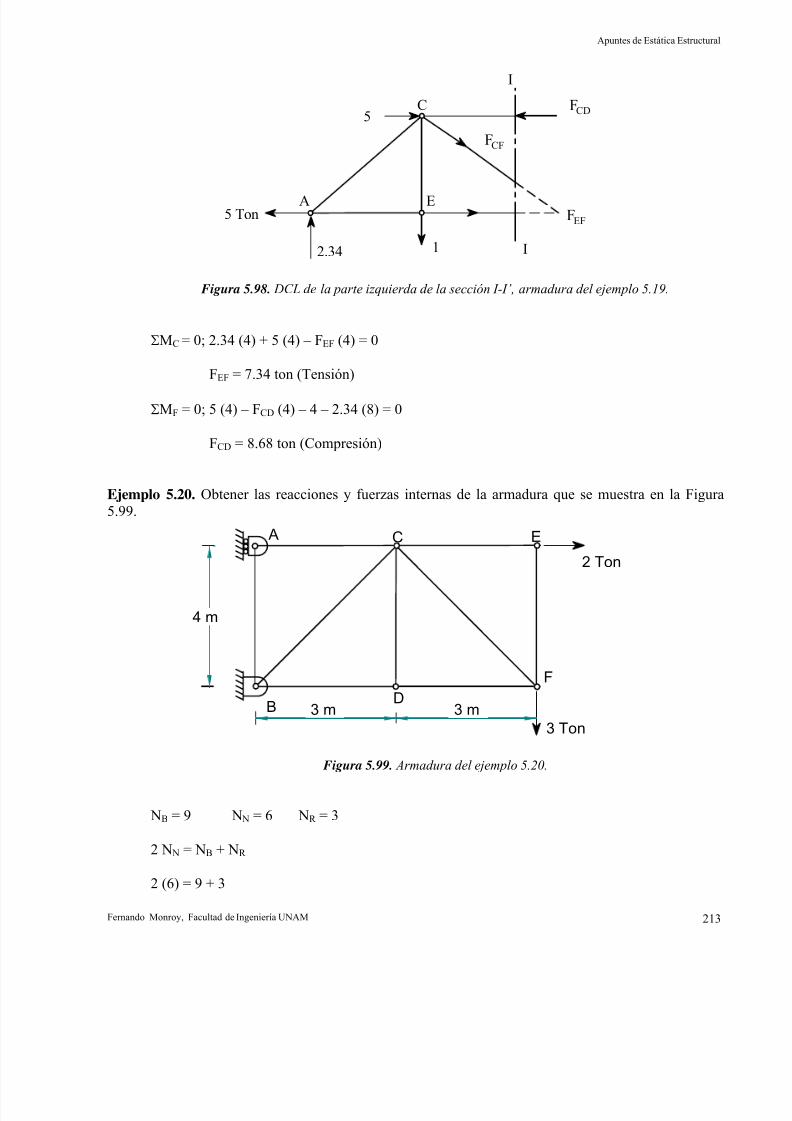
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 220/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 213
1 I2.34
5 Ton
5
A
I
E
C CDF
EFF
CFF
Figura 5.98. DCL de la parte izquierda de la sección I-I’, armadura del ejemplo 5.19.
ΣMC = 0; 2.34 (4) + 5 (4) – FEF (4) = 0
FEF = 7.34 ton (Tensión)
ΣMF = 0; 5 (4) – FCD (4) – 4 – 2.34 (8) = 0
FCD = 8.68 ton (Compresión)
Ejemplo 5.20. Obtener las reacciones y fuerzas internas de la armadura que se muestra en la Figura5.99.
2 Ton
B
3 Ton
A
F
E
D
C
0,04 45,093 m
0 , 4
3 m
4 m
Figura 5.99. Armadura del ejemplo 5.20.
NB = 9 N N = 6 NR = 3
2 N N = NB + NR
2 (6) = 9 + 3
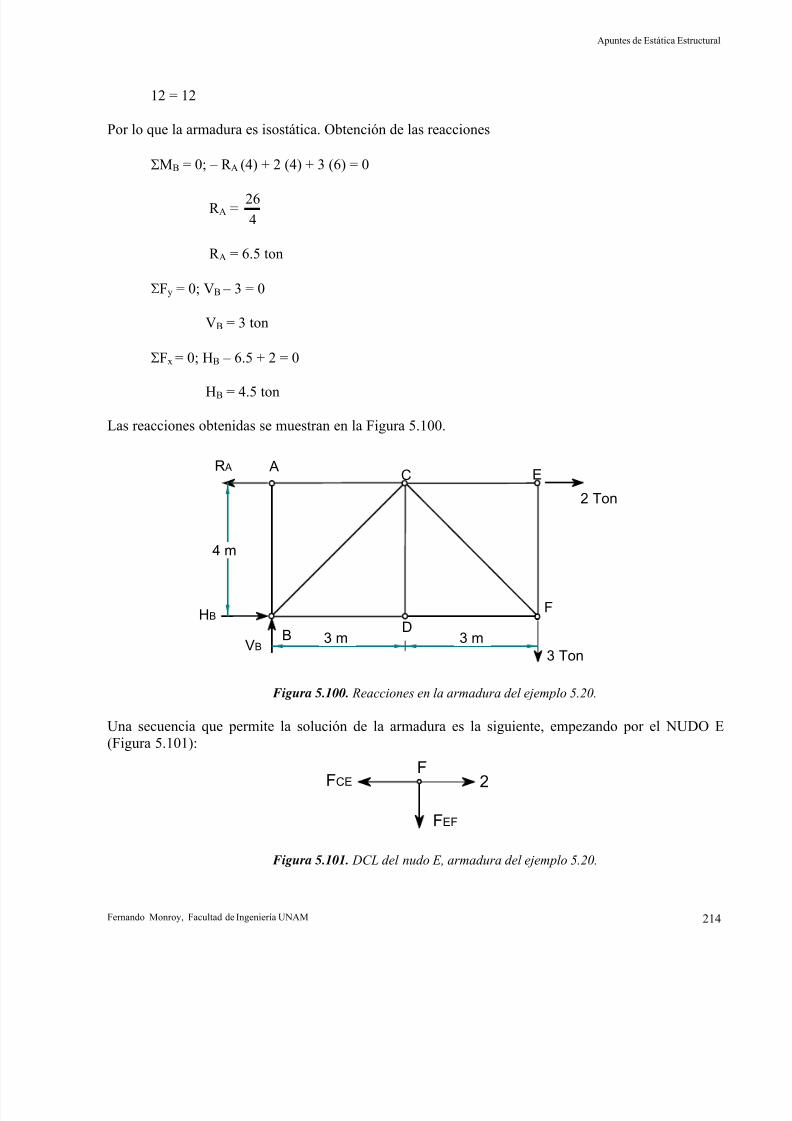
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 221/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 214
12 = 12
Por lo que la armadura es isostática. Obtención de las reacciones
ΣMB = 0; – R A (4) + 2 (4) + 3 (6) = 0
R A =4
26
R A = 6.5 ton
ΣFy = 0; VB – 3 = 0
VB = 3 ton
ΣFx = 0; HB – 6.5 + 2 = 0
HB = 4.5 ton
Las reacciones obtenidas se muestran en la Figura 5.100.
2 Ton
B
3 Ton
A
F
E
D
C
VB
RA
0,04 45,093 m
0 , 4
3 m
4 m
HB
Figura 5.100. Reacciones en la armadura del ejemplo 5.20.
Una secuencia que permite la solución de la armadura es la siguiente, empezando por el NUDO E(Figura 5.101):
FEF
F2FCE
Figura 5.101. DCL del nudo E, armadura del ejemplo 5.20.
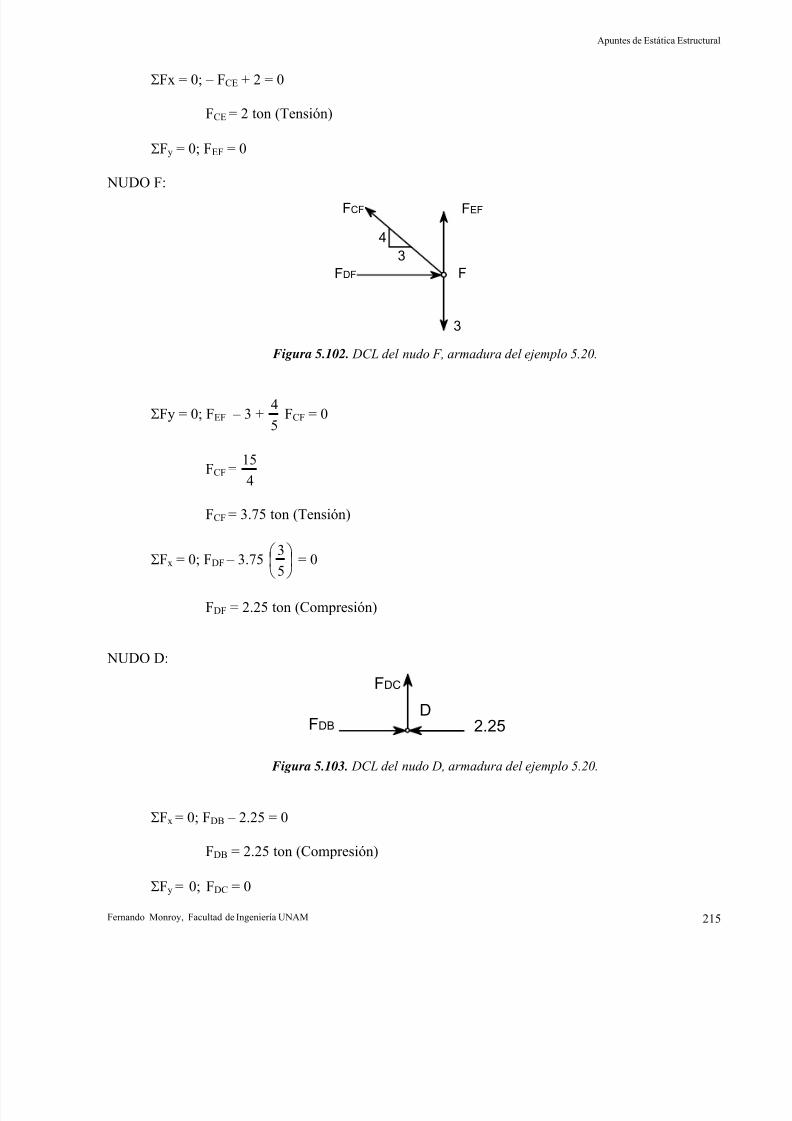
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 222/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 215
ΣFx = 0; – FCE + 2 = 0
FCE = 2 ton (Tensión)
ΣFy = 0; FEF = 0
NUDO F:FEF
FDF
34
FCF
3
F
Figura 5.102. DCL del nudo F, armadura del ejemplo 5.20.
ΣFy = 0; FEF – 3 +5
4FCF = 0
FCF =4
15
FCF = 3.75 ton (Tensión)
ΣFx = 0; FDF – 3.75 ⎟ ⎠
⎞
⎜⎝
⎛ 5
3
= 0
FDF = 2.25 ton (Compresión)
NUDO D:
FDC
D2.25FDB
Figura 5.103. DCL del nudo D, armadura del ejemplo 5.20.
ΣFx = 0; FDB – 2.25 = 0
FDB = 2.25 ton (Compresión)
ΣFy = 0; FDC = 0
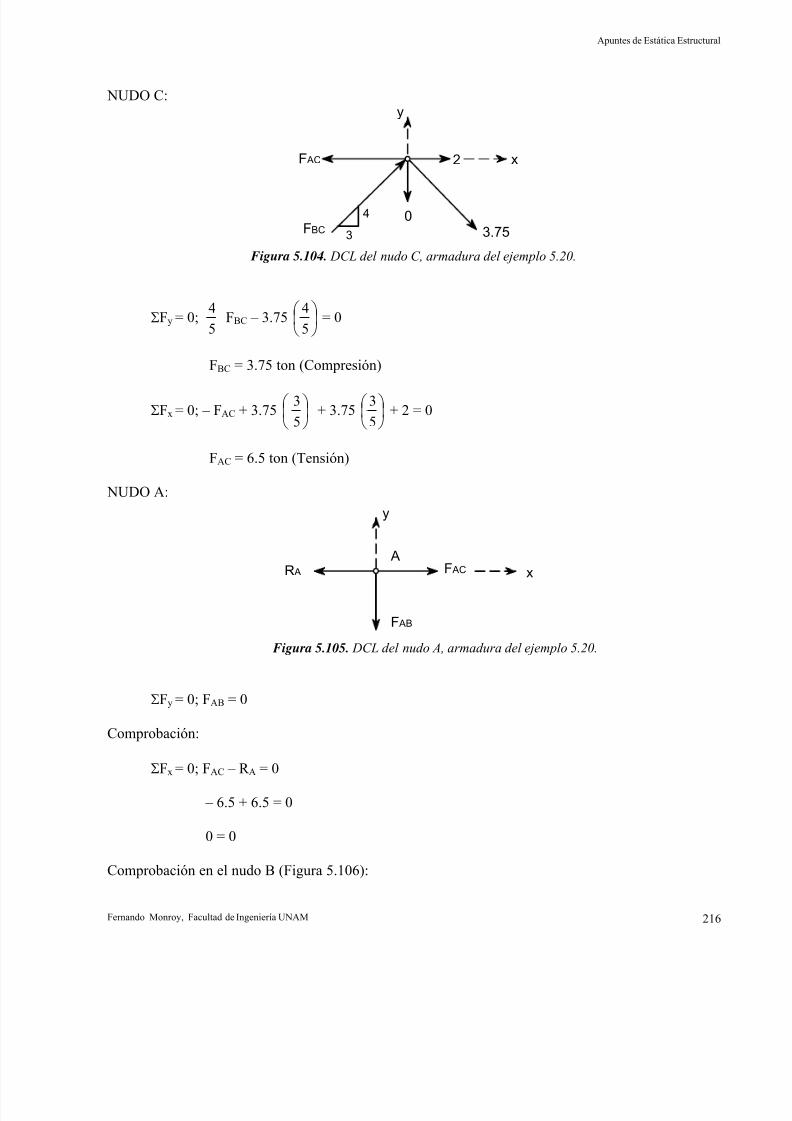
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 223/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 216
NUDO C:
4
FAC
3.75
2
0FBC 3
x
y
Figura 5.104. DCL del nudo C, armadura del ejemplo 5.20.
ΣFy = 0;5
4 FBC – 3.75 ⎟
⎠
⎞⎜⎝
⎛ 5
4= 0
FBC = 3.75 ton (Compresión)
ΣFx = 0; – FAC + 3.75 ⎟ ⎠
⎞⎜⎝
⎛ 5
3 + 3.75 ⎟
⎠
⎞⎜⎝
⎛ 5
3+ 2 = 0
FAC = 6.5 ton (Tensión)
NUDO A:
FACA
FAB
RA x
y
Figura 5.105. DCL del nudo A, armadura del ejemplo 5.20.
ΣFy = 0; FAB = 0
Comprobación:
ΣFx = 0; FAC – R A = 0
– 6.5 + 6.5 = 0
0 = 0
Comprobación en el nudo B (Figura 5.106):
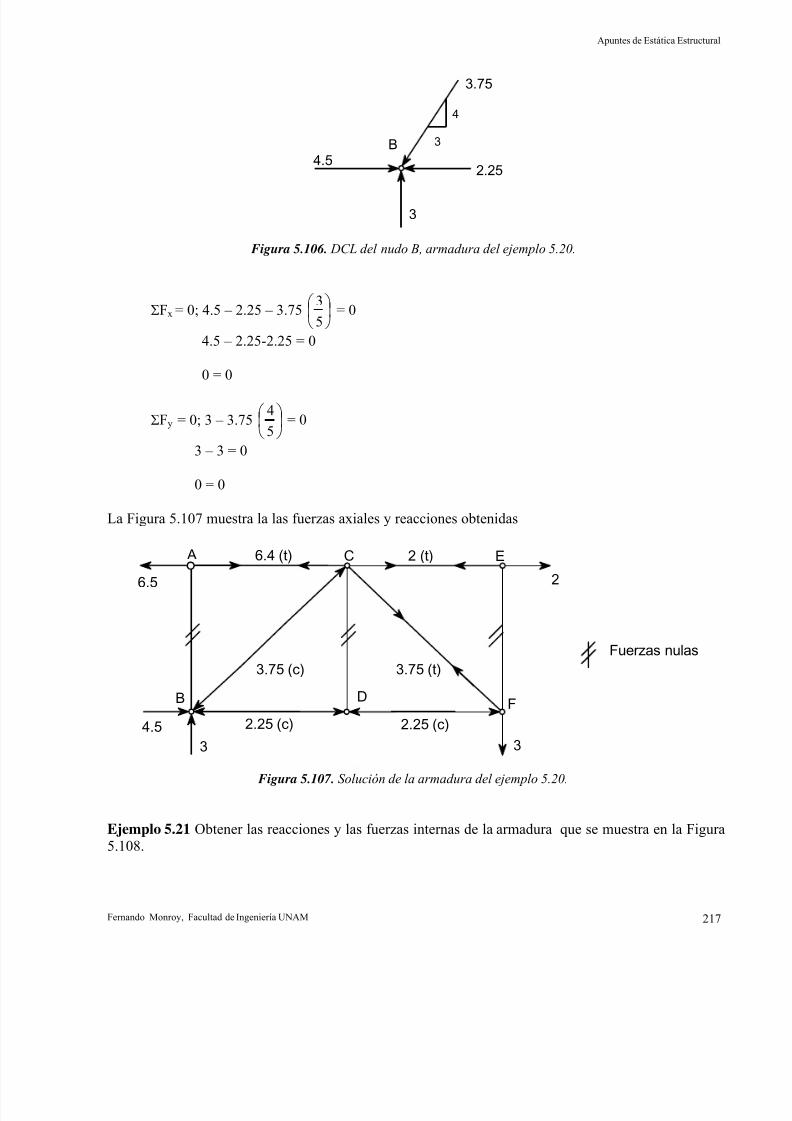
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 224/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 217
4.52.25
3
3
4
3.75
B
Figura 5.106. DCL del nudo B, armadura del ejemplo 5.20.
ΣFx = 0; 4.5 – 2.25 – 3.75 ⎟ ⎠
⎞⎜⎝
⎛ 5
3= 0
4.5 – 2.25-2.25 = 0
0 = 0
ΣFy = 0; 3 – 3.75 ⎟ ⎠
⎞⎜⎝
⎛ 5
4= 0
3 – 3 = 0
0 = 0
La Figura 5.107 muestra la las fuerzas axiales y reacciones obtenidas
4.5
2
B
3
F
E
D
C
3
3.75 (t)
2 (t)
2.25 (c)2.25 (c)
Fuerzas nulas3.75 (c)
A 6.4 (t)
6.5
Figura 5.107. Solución de la armadura del ejemplo 5.20.
Ejemplo 5.21 Obtener las reacciones y las fuerzas internas de la armadura que se muestra en la Figura5.108.
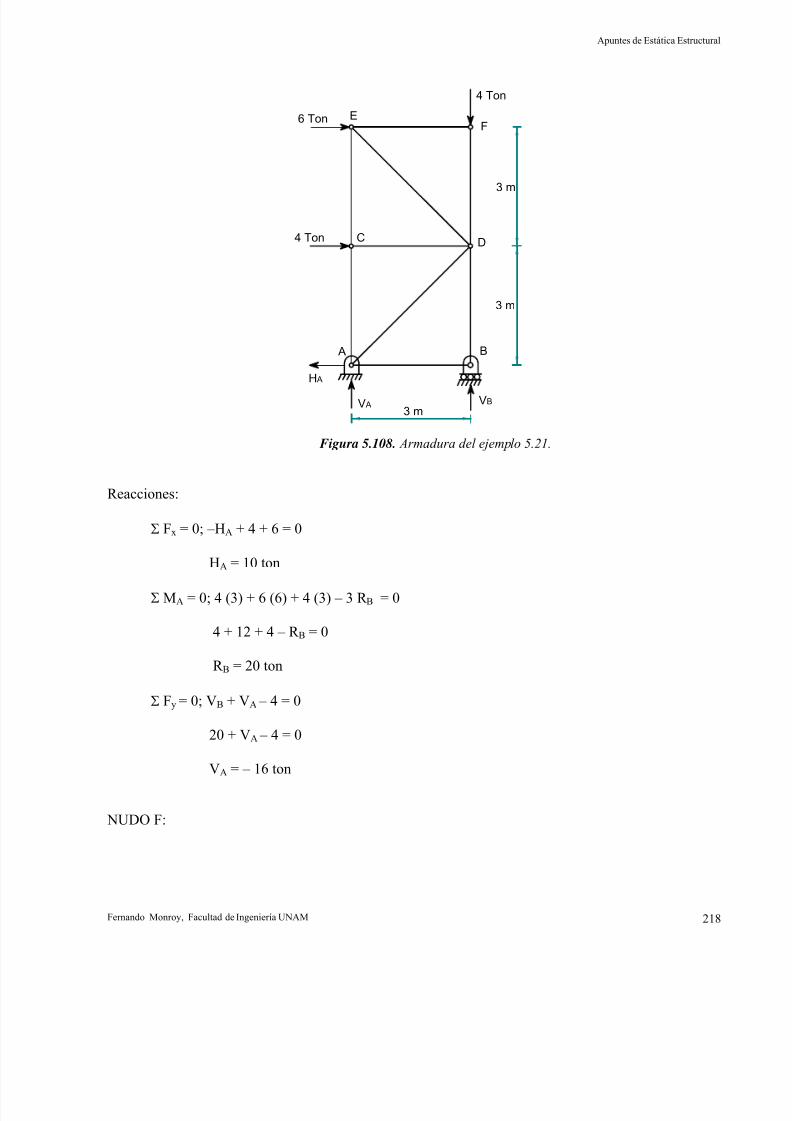
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 225/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 218
E6 Ton
4 Ton
F
C D
BA
4 Ton
HA
VA VB
5 0
3 m
5 03 m
503 m
Figura 5.108. Armadura del ejemplo 5.21.
Reacciones:
Σ Fx = 0; –HA + 4 + 6 = 0
HA = 10 ton
Σ MA = 0; 4 (3) + 6 (6) + 4 (3) – 3 R B = 0
4 + 12 + 4 – R B = 0
R B = 20 ton
Σ Fy = 0; VB + VA – 4 = 0
20 + VA – 4 = 0
VA = – 16 ton
NUDO F:
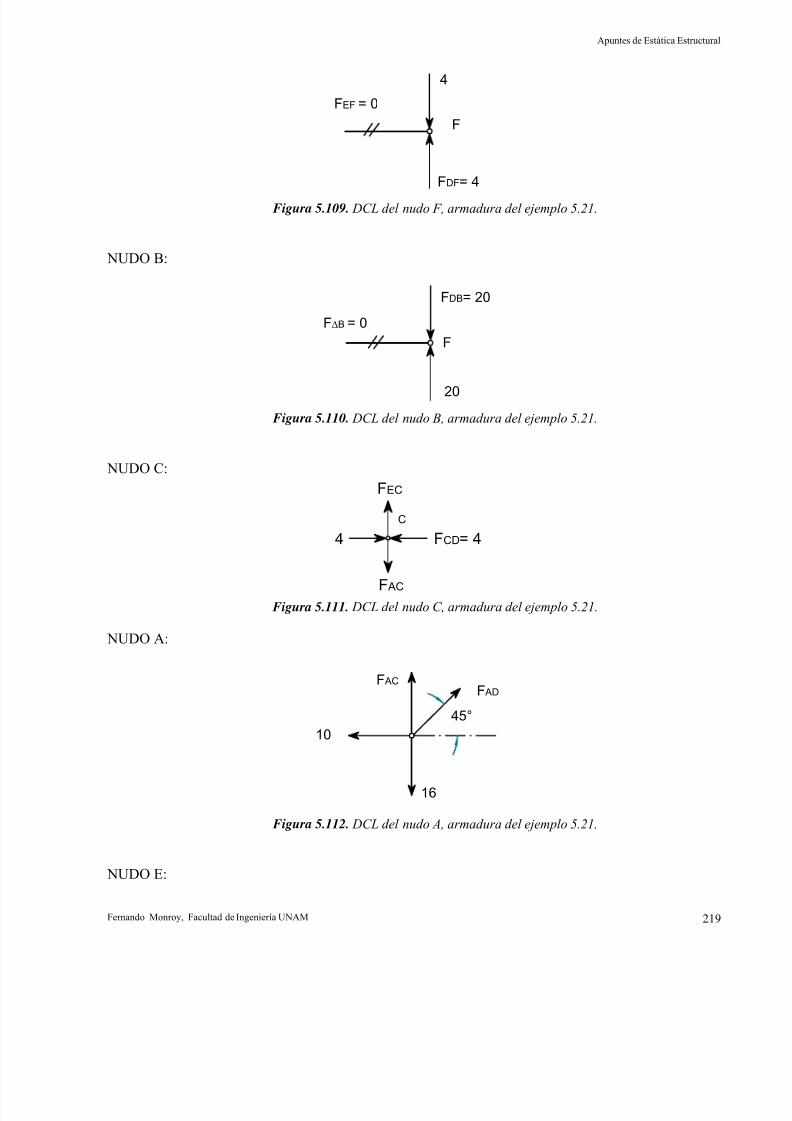
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 226/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 219
FDF= 4
FEF = 0
4
F
Figura 5.109. DCL del nudo F, armadura del ejemplo 5.21.
NUDO B:
FDB= 20
FΔB = 0
20
F
Figura 5.110. DCL del nudo B, armadura del ejemplo 5.21.
NUDO C:
FCD= 4C
4
FAC
FEC
Figura 5.111. DCL del nudo C, armadura del ejemplo 5.21.
NUDO A:
16
FAD
10
FAC
4 5 ° 45°
Figura 5.112. DCL del nudo A, armadura del ejemplo 5.21.
NUDO E:
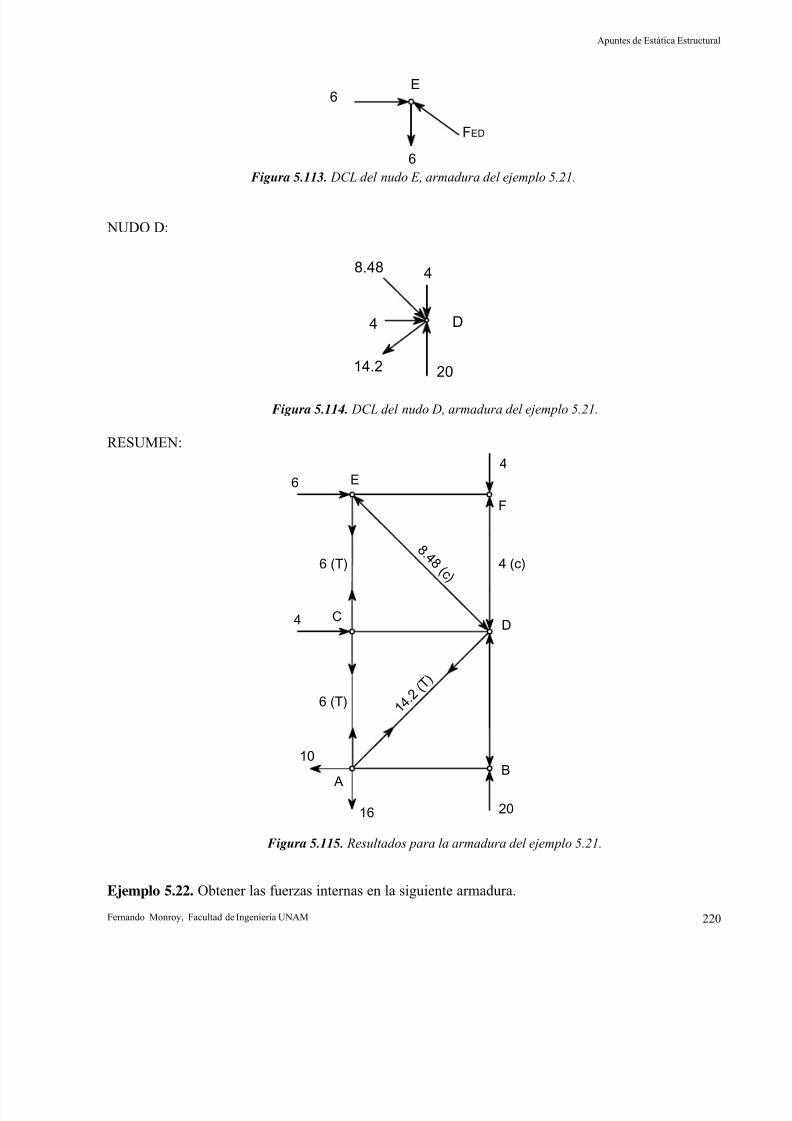
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 227/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 220
6
FED
6E
Figura 5.113. DCL del nudo E, armadura del ejemplo 5.21.
NUDO D:
D
2014.2
4
8.48 4
Figura 5.114. DCL del nudo D, armadura del ejemplo 5.21.
RESUMEN:
E6
4
6 (T) 1 4
. 2 ( T )
F
CD
BA
4
10
16 20
6 (T)
8 . 4 8 ( c ) 4 (c)
Figura 5.115. Resultados para la armadura del ejemplo 5.21.
Ejemplo 5.22. Obtener las fuerzas internas en la siguiente armadura.
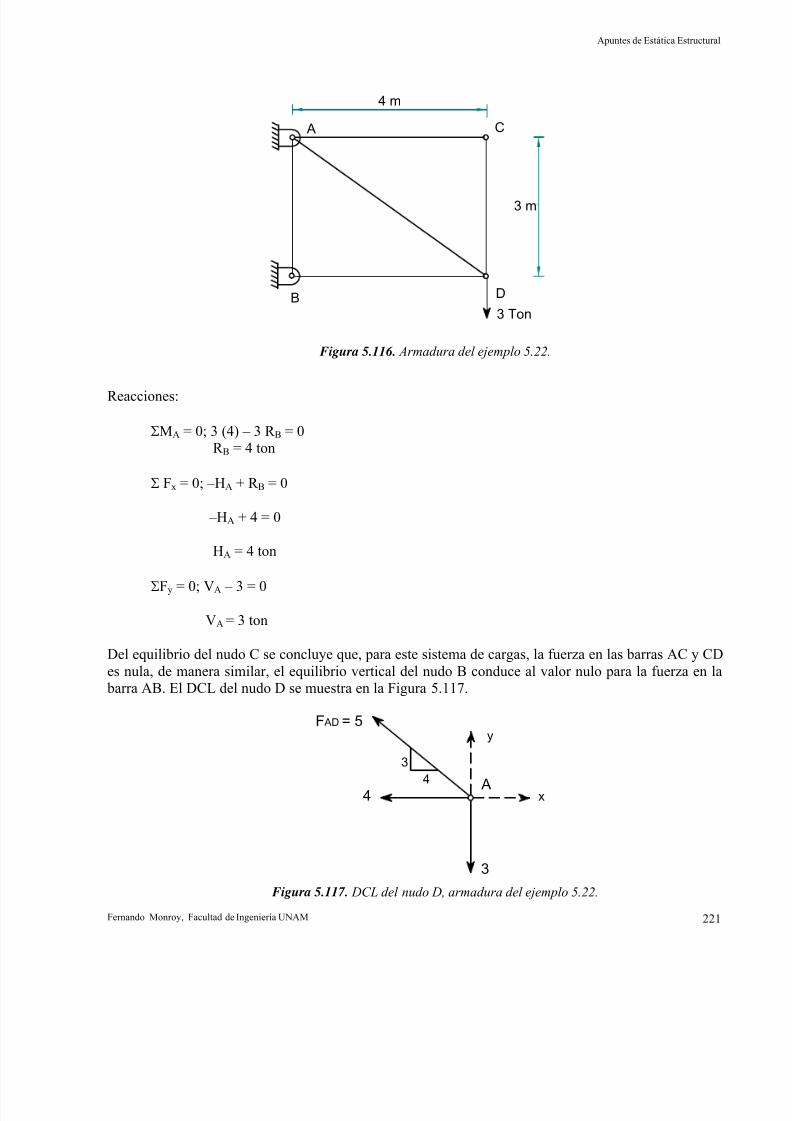
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 228/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 221
B
A
D
C
3 Ton
704 m
5 03 m
Figura 5.116. Armadura del ejemplo 5.22.
Reacciones:
ΣMA = 0; 3 (4) – 3 R B = 0R B = 4 ton
Σ Fx = 0; –HA + R B = 0
–HA + 4 = 0
HA = 4 ton
ΣFy = 0; VA – 3 = 0
VA = 3 ton
Del equilibrio del nudo C se concluye que, para este sistema de cargas, la fuerza en las barras AC y CDes nula, de manera similar, el equilibrio vertical del nudo B conduce al valor nulo para la fuerza en la barra AB. El DCL del nudo D se muestra en la Figura 5.117.
3
FAD = 5
4
34 A
y
x
Figura 5.117. DCL del nudo D, armadura del ejemplo 5.22.
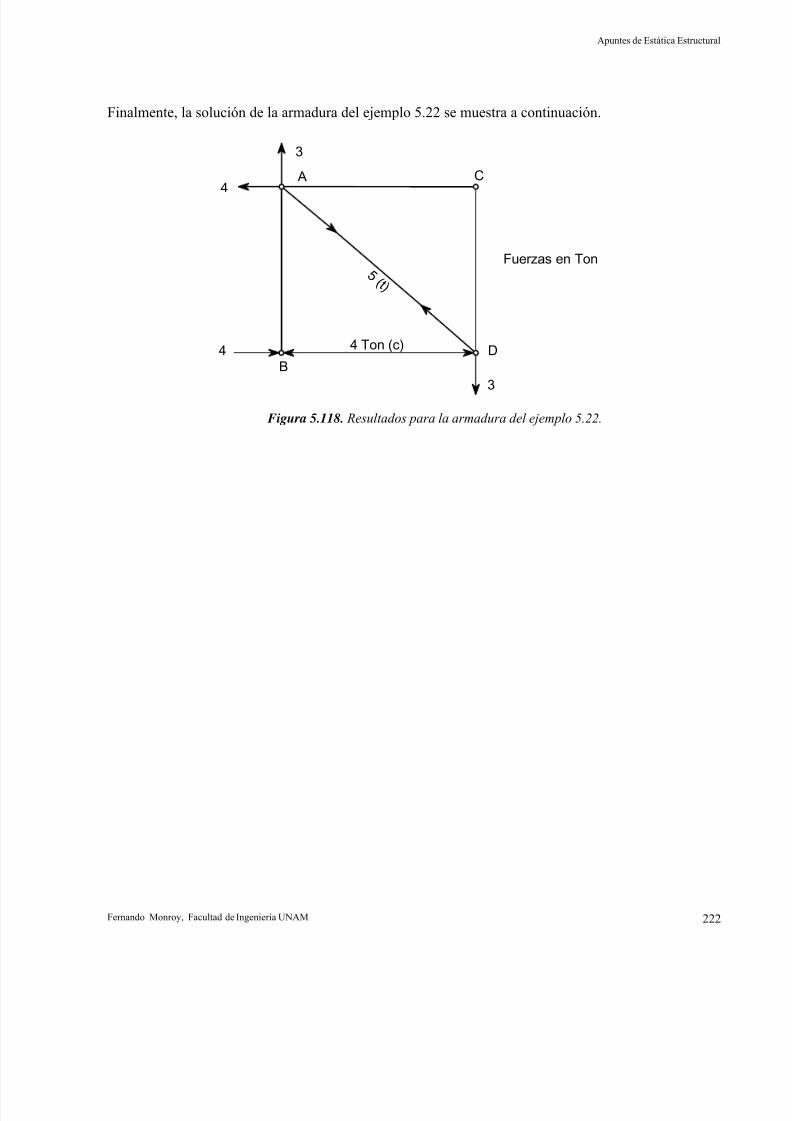
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 229/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 222
Finalmente, la solución de la armadura del ejemplo 5.22 se muestra a continuación.
5 ( t )
B
A
D
C
4 Ton (c)
3
3
4
Fuerzas en Ton
4
Figura 5.118. Resultados para la armadura del ejemplo 5.22.
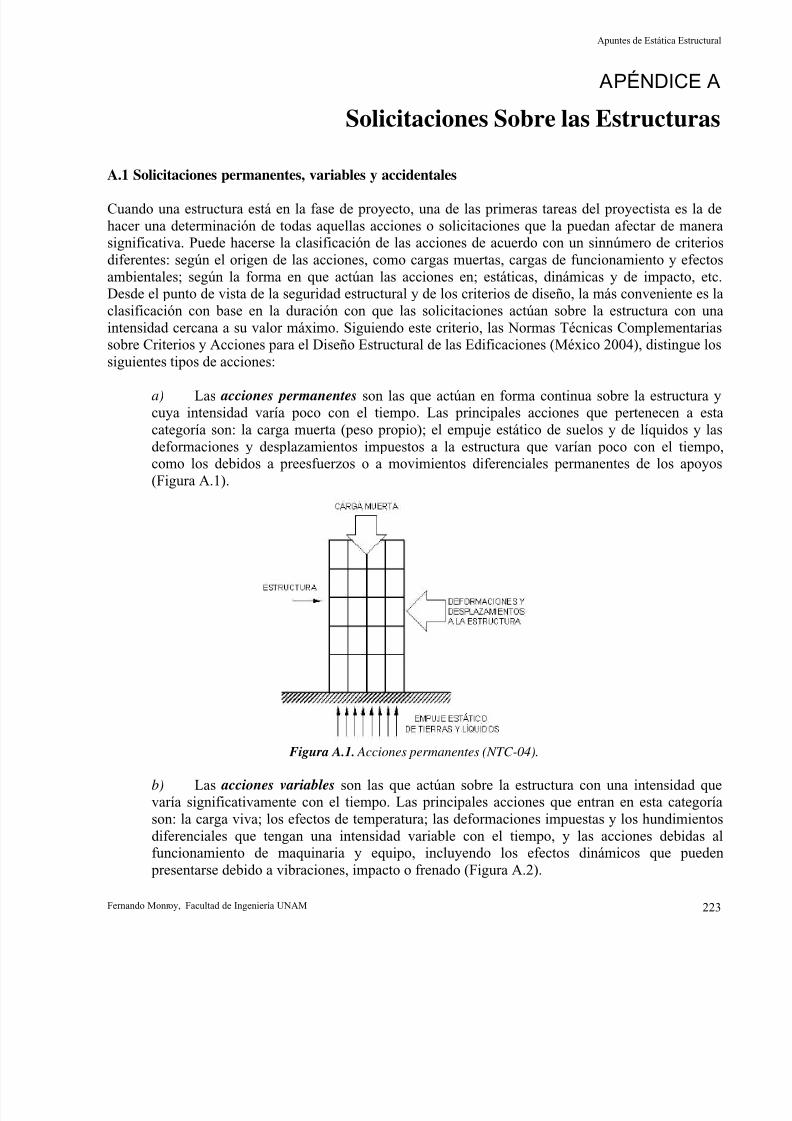
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 230/322
Apuntes de Estática Estructural
APÉNDICE A
Solicitaciones Sobre las Estructuras
A.1 Solicitaciones permanentes, variables y accidentales
Cuando una estructura está en la fase de proyecto, una de las primeras tareas del proyectista es la de
hacer una determinación de todas aquellas acciones o solicitaciones que la puedan afectar de manerasignificativa. Puede hacerse la clasificación de las acciones de acuerdo con un sinnúmero de criterios
diferentes: según el origen de las acciones, como cargas muertas, cargas de funcionamiento y efectos
ambientales; según la forma en que actúan las acciones en; estáticas, dinámicas y de impacto, etc.Desde el punto de vista de la seguridad estructural y de los criterios de diseño, la más conveniente es la
clasificación con base en la duración con que las solicitaciones actúan sobre la estructura con una
intensidad cercana a su valor máximo. Siguiendo este criterio, las Normas Técnicas Complementariassobre Criterios y Acciones para el Diseño Estructural de las Edificaciones (México 2004), distingue los
siguientes tipos de acciones:
a) Las acciones permanentes son las que actúan en forma continua sobre la estructura y
cuya intensidad varía poco con el tiempo. Las principales acciones que pertenecen a esta
categoría son: la carga muerta (peso propio); el empuje estático de suelos y de líquidos y las
deformaciones y desplazamientos impuestos a la estructura que varían poco con el tiempo,como los debidos a preesfuerzos o a movimientos diferenciales permanentes de los apoyos
(Figura A.1).
Figura A.1. Acciones permanentes (NTC-04).
b) Las acciones variables son las que actúan sobre la estructura con una intensidad que
varía significativamente con el tiempo. Las principales acciones que entran en esta categoría
son: la carga viva; los efectos de temperatura; las deformaciones impuestas y los hundimientos
diferenciales que tengan una intensidad variable con el tiempo, y las acciones debidas alfuncionamiento de maquinaria y equipo, incluyendo los efectos dinámicos que pueden
presentarse debido a vibraciones, impacto o frenado (Figura A.2).
Fernando Monroy, Facultad de Ingeniería UNAM 223
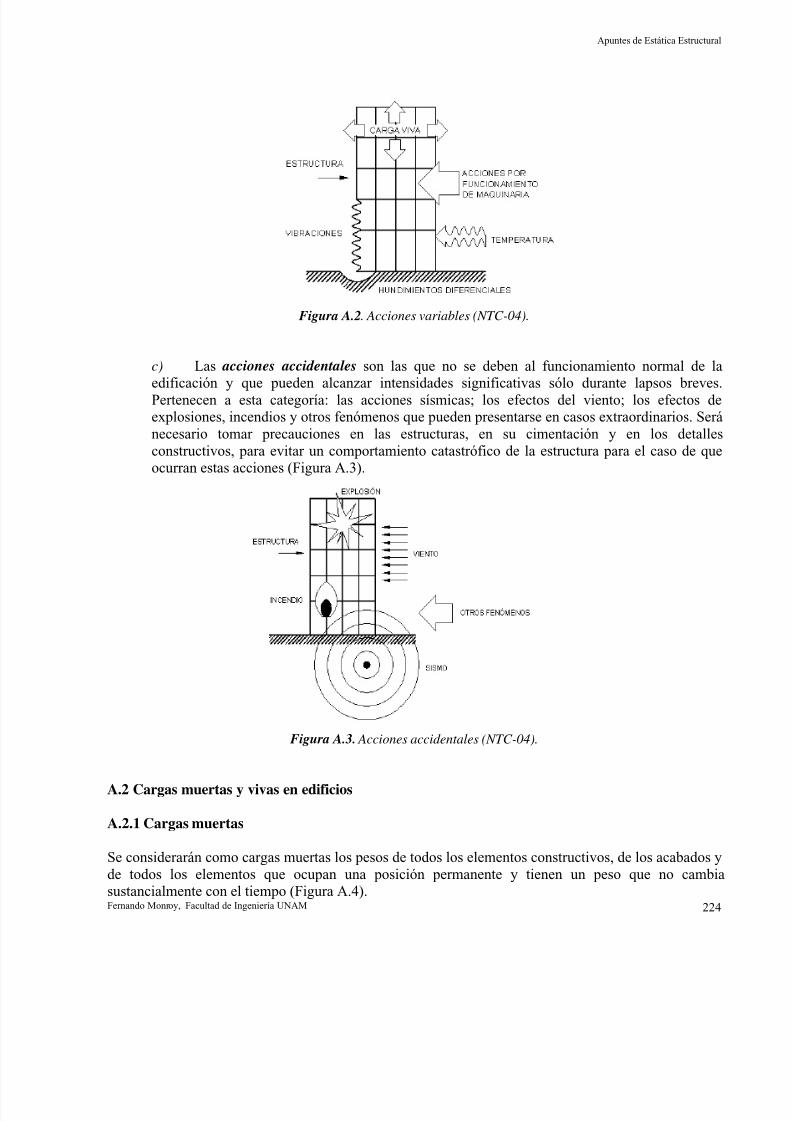
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 231/322
Apuntes de Estática Estructural
Figura A.2. Acciones variables (NTC-04).
c) Las acciones accidentales son las que no se deben al funcionamiento normal de la
edificación y que pueden alcanzar intensidades significativas sólo durante lapsos breves.
Pertenecen a esta categoría: las acciones sísmicas; los efectos del viento; los efectos deexplosiones, incendios y otros fenómenos que pueden presentarse en casos extraordinarios. Será
necesario tomar precauciones en las estructuras, en su cimentación y en los detalles
constructivos, para evitar un comportamiento catastrófico de la estructura para el caso de queocurran estas acciones (Figura A.3).
Figura A.3. Acciones accidentales (NTC-04).
A.2 Cargas muertas y vivas en edificios
A.2.1 Cargas muertas
Fernando Monroy, Facultad de Ingeniería UNAM 224
Se considerarán como cargas muertas los pesos de todos los elementos constructivos, de los acabados y
de todos los elementos que ocupan una posición permanente y tienen un peso que no cambiasustancialmente con el tiempo (Figura A.4).
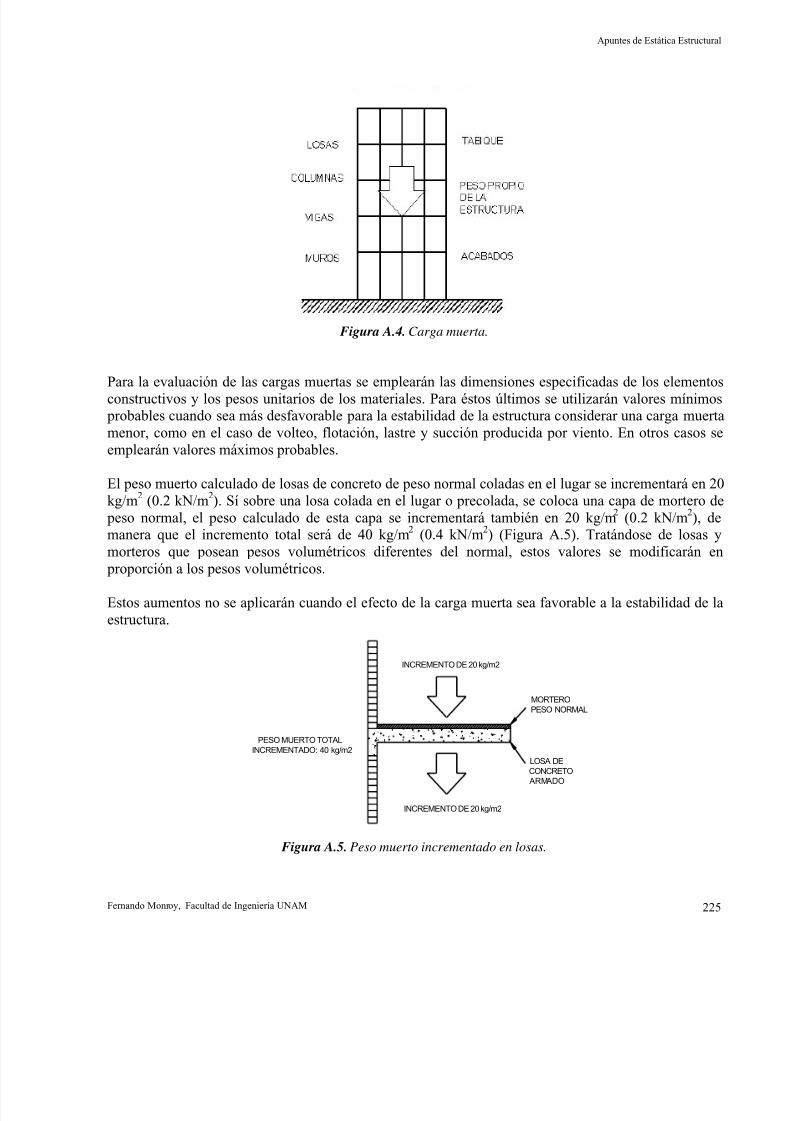
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 232/322
Apuntes de Estática Estructural
Figura A.4. Carga muerta.
Para la evaluación de las cargas muertas se emplearán las dimensiones especificadas de los elementos
constructivos y los pesos unitarios de los materiales. Para éstos últimos se utilizarán valores mínimos probables cuando sea más desfavorable para la estabilidad de la estructura considerar una carga muerta
menor, como en el caso de volteo, flotación, lastre y succión producida por viento. En otros casos se
emplearán valores máximos probables.
El peso muerto calculado de losas de concreto de peso normal coladas en el lugar se incrementará en 20
kg/m2 (0.2 kN/m
2). Sí sobre una losa colada en el lugar o precolada, se coloca una capa de mortero de
peso normal, el peso calculado de esta capa se incrementará también en 20 kg/m2 (0.2 kN/m
2), de
manera que el incremento total será de 40 kg/m2 (0.4 kN/m
2) (Figura A.5). Tratándose de losas y
morteros que posean pesos volumétricos diferentes del normal, estos valores se modificarán en
proporción a los pesos volumétricos.
Estos aumentos no se aplicarán cuando el efecto de la carga muerta sea favorable a la estabilidad de la
estructura.
Fernando Monroy, Facultad de Ingeniería UNAM 225
Figura A.5. Peso muerto incrementado en losas.
INCREMENTO DE 20 kg/m2
INCREMENTO DE 20 kg/m2
PESO MUERTO TOTAL
INCREMENTADO: 40 kg/m2LOSA DE
CONCRETO
ARMADO
MORTERO
PESO NORMAL
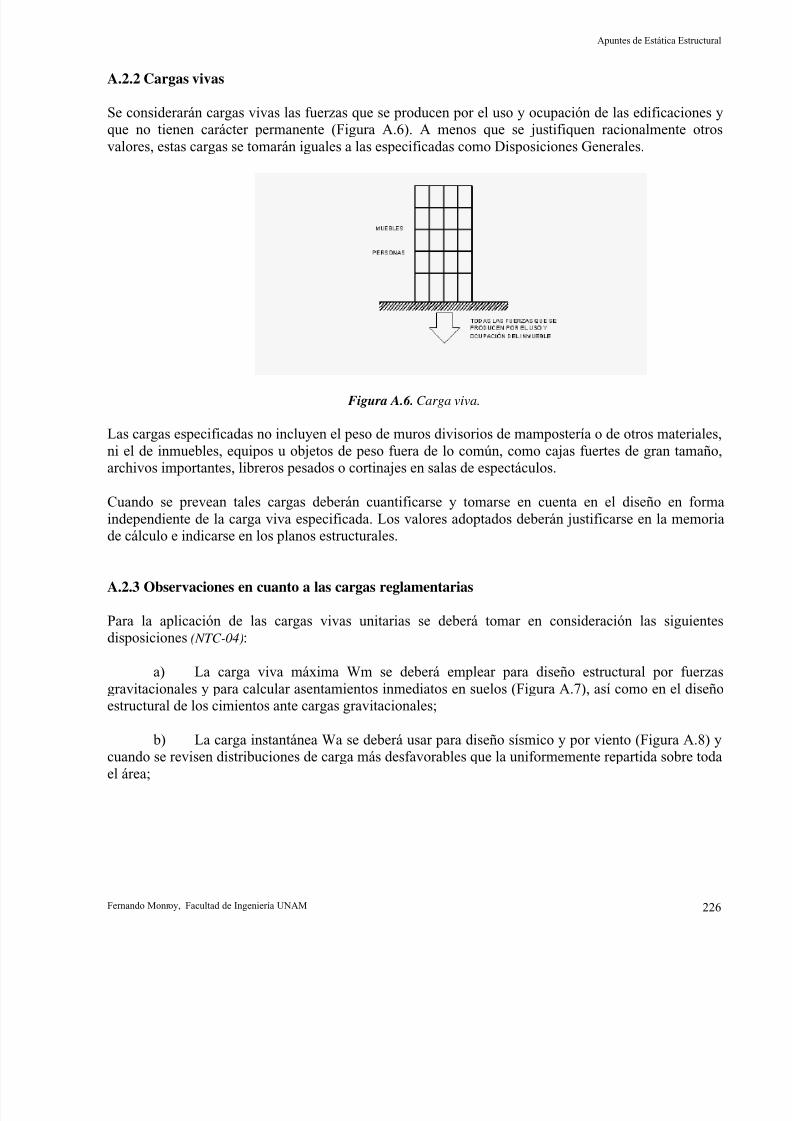
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 233/322
Apuntes de Estática Estructural
A.2.2 Cargas vivas
Se considerarán cargas vivas las fuerzas que se producen por el uso y ocupación de las edificaciones yque no tienen carácter permanente (Figura A.6). A menos que se justifiquen racionalmente otros
valores, estas cargas se tomarán iguales a las especificadas como Disposiciones Generales.
Figura A.6. Carga viva.
Las cargas especificadas no incluyen el peso de muros divisorios de mampostería o de otros materiales,
ni el de inmuebles, equipos u objetos de peso fuera de lo común, como cajas fuertes de gran tamaño,archivos importantes, libreros pesados o cortinajes en salas de espectáculos.
Cuando se prevean tales cargas deberán cuantificarse y tomarse en cuenta en el diseño en forma
independiente de la carga viva especificada. Los valores adoptados deberán justificarse en la memoriade cálculo e indicarse en los planos estructurales.
A.2.3 Observaciones en cuanto a las cargas reglamentarias
Para la aplicación de las cargas vivas unitarias se deberá tomar en consideración las siguientesdisposiciones (NTC-04):
a) La carga viva máxima Wm se deberá emplear para diseño estructural por fuerzas
gravitacionales y para calcular asentamientos inmediatos en suelos (Figura A.7), así como en el diseñoestructural de los cimientos ante cargas gravitacionales;
b) La carga instantánea Wa se deberá usar para diseño sísmico y por viento (Figura A.8) y
cuando se revisen distribuciones de carga más desfavorables que la uniformemente repartida sobre todael área;
Fernando Monroy, Facultad de Ingeniería UNAM 226
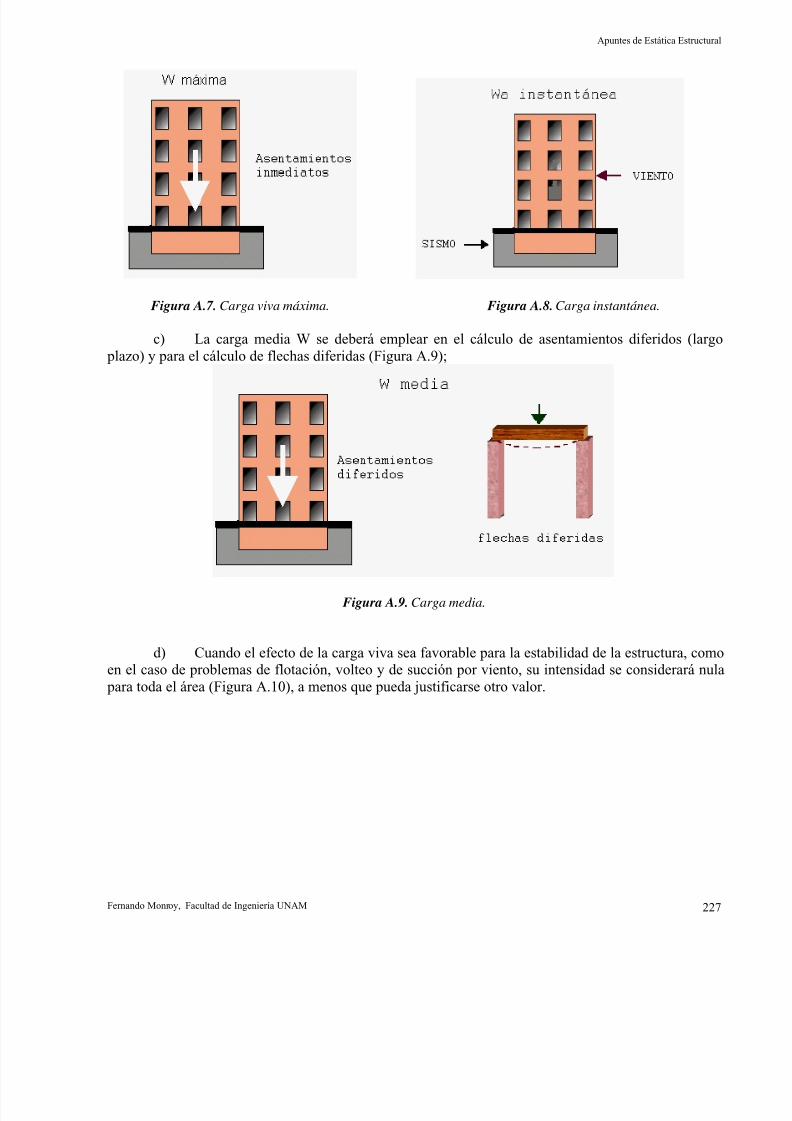
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 234/322
Apuntes de Estática Estructural
Figura A.7. Carga viva máxima. Figura A.8. Carga instantánea.
c) La carga media W se deberá emplear en el cálculo de asentamientos diferidos (largo
plazo) y para el cálculo de flechas diferidas (Figura A.9);
Figura A.9. Carga media.
d) Cuando el efecto de la carga viva sea favorable para la estabilidad de la estructura, comoen el caso de problemas de flotación, volteo y de succión por viento, su intensidad se considerará nula
para toda el área (Figura A.10), a menos que pueda justificarse otro valor.
Fernando Monroy, Facultad de Ingeniería UNAM 227
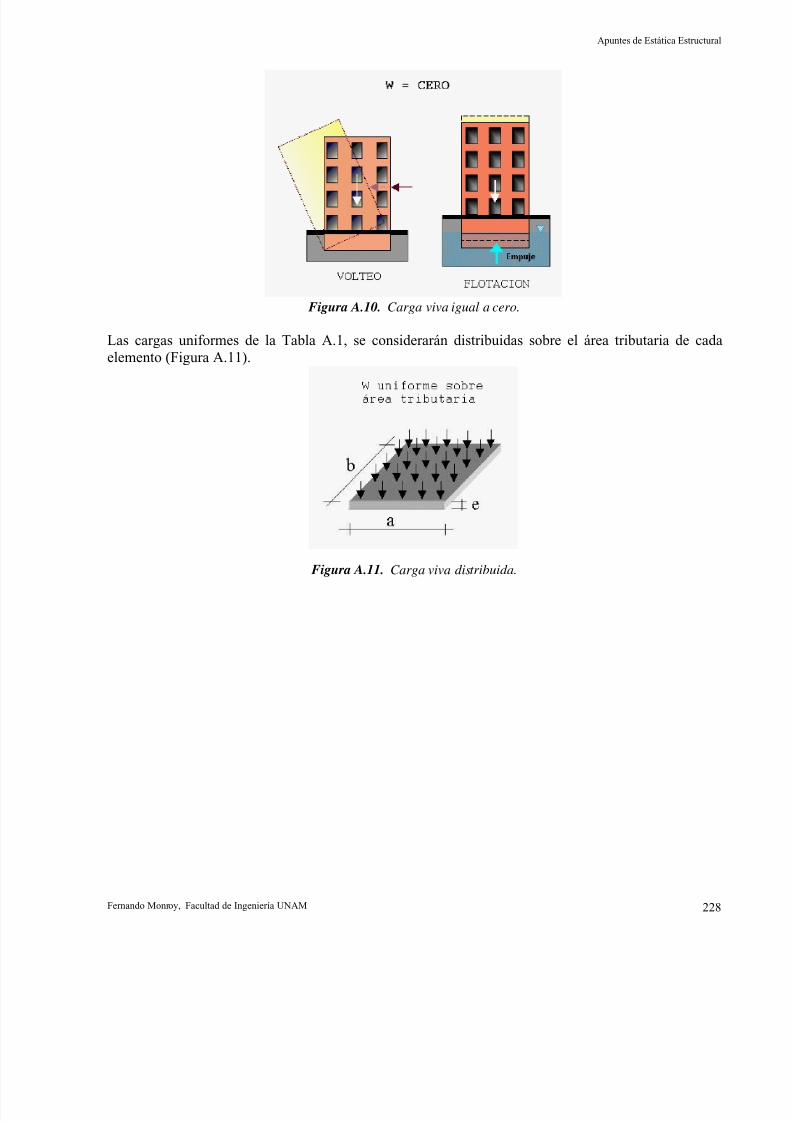
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 235/322
Apuntes de Estática Estructural
Figura A.10. Carga viva igual a cero.
Las cargas uniformes de la Tabla A.1, se considerarán distribuidas sobre el área tributaria de cada
elemento (Figura A.11).
Figura A.11. Carga viva distribuida.
Fernando Monroy, Facultad de Ingeniería UNAM 228
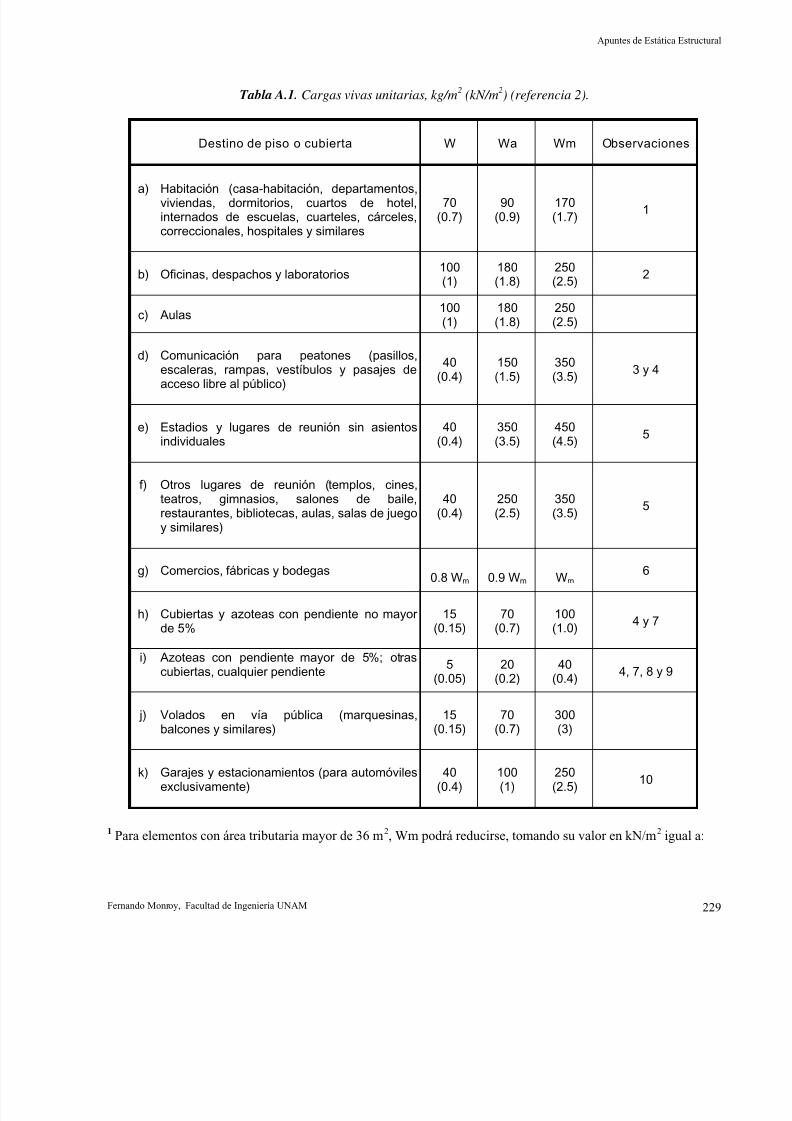
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 236/322
Apuntes de Estática Estructural
Tabla A.1. Cargas vivas unitarias, kg/m2 (kN/m
2) (referencia 2).
Destino de piso o cubierta W Wa Wm Observaciones
a) Habitación (casa-habitación, departamentos,viviendas, dormitorios, cuartos de hotel,internados de escuelas, cuarteles, cárceles,correccionales, hospitales y similares
70(0.7)
90(0.9)
170(1.7)
1
b) Oficinas, despachos y laboratorios100(1)
180(1.8)
250(2.5)
2
c) Aulas100(1)
180(1.8)
250(2.5)
d) Comunicación para peatones (pasillos,
escaleras, rampas, vestíbulos y pasajes deacceso libre al público)
40
(0.4)
150
(1.5)
350
(3.5) 3 y 4
e) Estadios y lugares de reunión sin asientosindividuales
40(0.4)
350(3.5)
450(4.5)
5
f) Otros lugares de reunión (templos, cines,teatros, gimnasios, salones de baile,restaurantes, bibliotecas, aulas, salas de juegoy similares)
40(0.4)
250(2.5)
350(3.5)
5
g) Comercios, fábricas y bodegas0.8 Wm
0.9 Wm
Wm
6
h) Cubiertas y azoteas con pendiente no mayorde 5%
15(0.15)
70(0.7)
100(1.0)
4 y 7
i) Azoteas con pendiente mayor de 5%; otrascubiertas, cualquier pendiente
5(0.05)
20(0.2)
40(0.4)
4, 7, 8 y 9
j) Volados en vía pública (marquesinas,balcones y similares)
15(0.15)
70(0.7)
300(3)
k) Garajes y estacionamientos (para automóvilesexclusivamente)
40(0.4)
100(1)
250(2.5)
10
1 Para elementos con área tributaria mayor de 36 m2, Wm podrá reducirse, tomando su valor en kN/m2 igual a:
Fernando Monroy, Facultad de Ingeniería UNAM 229
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 237/322
Apuntes de Estática Estructural
⎟ ⎠
⎞⎜⎝
⎛ +
+
2kg/men;
420100
2.40.1
A
A
Donde A es el área tributaria en m2. Cuando sea más desfavorable se considerará en lugar de Wm, una carga de 5
kN (500 kg) aplicada sobre un área de 500 × 500 mm en la posición más crítica.
Para sistemas de piso ligeros con cubierta rigidizante, se considerará en lugar de Wm, cuando sea más
desfavorable, una carga concentrada de 2.5 kN (250 kg) para el diseño de los elementos de soporte y de 1 kN
(100 kg) para el diseño de la cubierta, en ambos casos ubicadas en la posición más desfavorable.
Se considerarán sistemas de piso ligero aquéllos formados por tres o más miembros aproximadamente paralelos
y separados entre si no más de 800 mm y unidos con una cubierta de madera contrachapada, de duelas de madera
bien clavadas u con otro material que proporcione una rigidez equivalente.
2 Para elementos con área tributaria de 36 m2, Wm podrá reducirse, tomando su valor en kN/m2 igual a:
⎟ ⎠
⎞⎜⎝
⎛ +
+
2kg/men;
850110
5.81.1
A
A
Donde A es el área tributaria en m2. Cuando sea más desfavorable se considerará en lugar de Wm, una carga de
10 kN (1,000 kdg) aplicada sobre un área de 500 × 500 mm en la posición más crítica.
Para sistemas de piso ligero con cubierta rigidizante, definidos como en la nota 1, se considerará en lugar de Wm,
cuando sea más desfavorable, una carga concentrada de 5 kN (500 kg) para el diseño de los elementos de soporte
y de 1.5 kN (150kg) para el diseño de la cubierta, ubicadas en la posición más desfavorable.
3 En pareas de comunicación de casas de habitación y edificios de departamentos se considerará la misma carga
viva que en el inciso (a) de la Tabla A.1.
4 Para el diseño de los pretiles y barandales en escaleras, rampas, pasillos y balcones, se deberá fijar una carga
por metro lineal no menor de 1 kN/m (100 kg/m) actuando al nivel de pasamanos y en la dirección más
desfavorable.
5 En estos casos deberá prestarse particular atención a la revisión de los estados límite de servicio relativos a
vibraciones.
6
Atendiendo al destino del piso se determinará con los criterios de la sección 22 la carga unitaria, Wm, que noserá inferior a 3.5 kN/m2 (350 kg/m2) y deberá especificarse en los planos estructurales y en placas colocadas en
lugares fácilmente visibles de la edificación.
7 Las cargas vivas especificadas para cubiertas y azoteas no incluyen las cargas producidas por tinacos y
anuncios, ni las que se deben a equipos u objetos pesados que puedan apoyarse en o colgarse del techo. Estas
cargas deben preverse por separado y especificarse en los planos estructurales.
Fernando Monroy, Facultad de Ingeniería UNAM 230
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 238/322
Apuntes de Estática Estructural
Adicionalmente, los elementos de las cubiertas y azoteas deberán revisarse con una carga concentrada de 1 kN
(100 kg) en la posición más crítica.
8 Además, en el fondo de los valles de techos inclinados se considerará una carga debida al granizo de 0.3 kN
(30kg) por cada metro cuadrado de proyección horizontal del techo que desagüe hacia el valle. Esta carga se
considerará como una acción accidental para fines de revisión de la seguridad y se le aplicarán los factores de
carga correspondientes según la sección 3.4.
9 Para tomar en cuenta el efecto de granizo, Wm se tomará igual a 1.0 kN/m2 (100 kg/m2) y se tratará como una
carga accidental para fines de calcular los factores de carga de acuerdo con lo establecido en la sección 3.4. Esta
carga no es aditiva a la que se menciona en el inciso (1) de la Tabla A.1 en la nota 8.
10 Más una concentración de 15 kN (1,500 kg), en el lugar más desfavorable del miembro estructural de que se
trate.
A.4 Pesos volumétricos de materiales
Para cuantificar el peso propio de los elementos estructurales y así poder realizar un análisis de cargasen las estructuras (carga muerta, viva, etc.), es necesario conocer el peso volumétrico de los materiales.
Así, por ejemplo, si deseamos conocer el peso de una columna, sólo basta obtener el volumen ymultiplicarlo por el peso volumétrico del material del cual está o estará hecha la columna.
Supongamos que tenemos una viga de concreto reforzado, de sección transversal 20 x 30 cm y con unalongitud de 5 m (Figura A.12), ¿Qué debemos hacer para cuantificar el peso propio de dicho elemento?
Viga de concreto reforzado
5 m
30 cm
20 cm
Figura A.12. Viga de concreto reforzado.
El peso propio de la viga está definido por:
W = γ V
W = peso propio del elemento
γ = peso volumétrico del material
V = volumen del elemento
Fernando Monroy, Facultad de Ingeniería UNAM 231
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 239/322
Apuntes de Estática Estructural
Para este caso en particular:
V = 0.20 (0.30) (5.00) = 0.3 m3
De la Tabla A.2, tenemos que el peso volumétrico del concreto reforzado es: 2.4 ton/m3, por lo que el
peso propio de la viga será:
W = 2.4 ton/m3 (0.3 m
3)
W = 0.72 ton
En ocasiones es útil conocer y emplear el peso por unidad de longitud, y así utilizarlo también para
cuantificar, por ejemplo, el peso propio de elementos de diferentes materiales pero con la misma área
transversal, de esta manera tendremos:
wl = γ A = 2.4 ton/m3 (0.30 m x 0.20 m)
wl = 0.144 ton/m
Para el caso de elementos placa, el caso es similar. Supongamos ahora una losa maciza de concretoreforzado de 10 cm de espesor y con lados de 4m x 3m (Figura A.13).
Losa maciza
de concreto
3 m
10 cm
4 m
Figura A.13. Losa maciza de concreto.
El peso total de la losa está dado por:
W = γ V
Para este caso:
V = 0.10 (4.00) (3.00) = 1.2 m3
Fernando Monroy, Facultad de Ingeniería UNAM 232
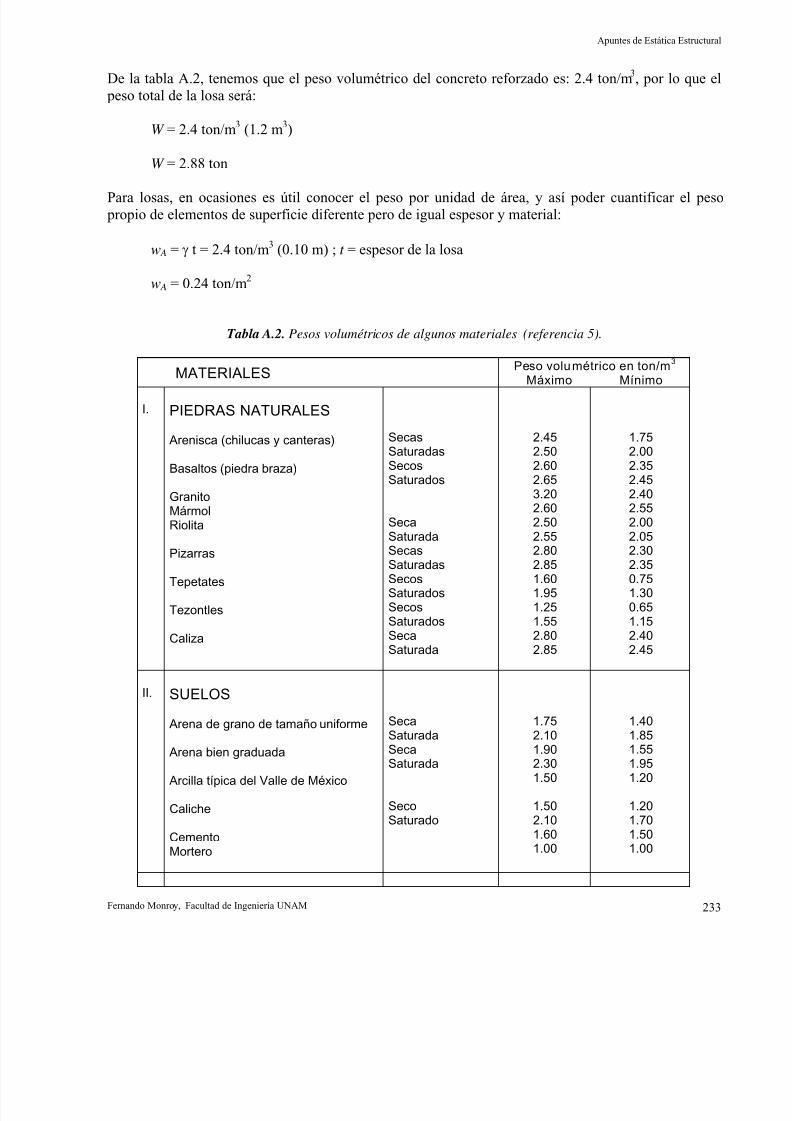
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 240/322
Apuntes de Estática Estructural
De la tabla A.2, tenemos que el peso volumétrico del concreto reforzado es: 2.4 ton/m3, por lo que el
peso total de la losa será:
W = 2.4 ton/m3 (1.2 m
3)
W = 2.88 ton
Para losas, en ocasiones es útil conocer el peso por unidad de área, y así poder cuantificar el peso
propio de elementos de superficie diferente pero de igual espesor y material:
w A = γ t = 2.4 ton/m3 (0.10 m) ; t = espesor de la losa
w A = 0.24 ton/m2
Tabla A.2. Pesos volumétricos de algunos materiales (referencia 5).
MATERIALESPeso volumétrico en ton/m3
Máximo Mínimo
I. PIEDRAS NATURALES
Arenisca (chilucas y canteras)
Basaltos (piedra braza)
GranitoMármolRiolita
Pizarras
Tepetates
Tezontles
Caliza
SecasSaturadasSecosSaturados
SecaSaturadaSecas
SaturadasSecosSaturadosSecosSaturadosSecaSaturada
2.452.502.602.653.202.602.502.552.80
2.851.601.951.251.552.802.85
1.752.002.352.452.402.552.002.052.30
2.350.751.300.651.152.402.45
II. SUELOS
Arena de grano de tamaño uniforme
Arena bien graduada
Arcilla típica del Valle de México
Caliche
CementoMortero
SecaSaturada
SecaSaturada
SecoSaturado
1.752.10
1.902.301.50
1.502.101.601.00
1.401.85
1.551.951.20
1.201.701.501.00
Fernando Monroy, Facultad de Ingeniería UNAM 233
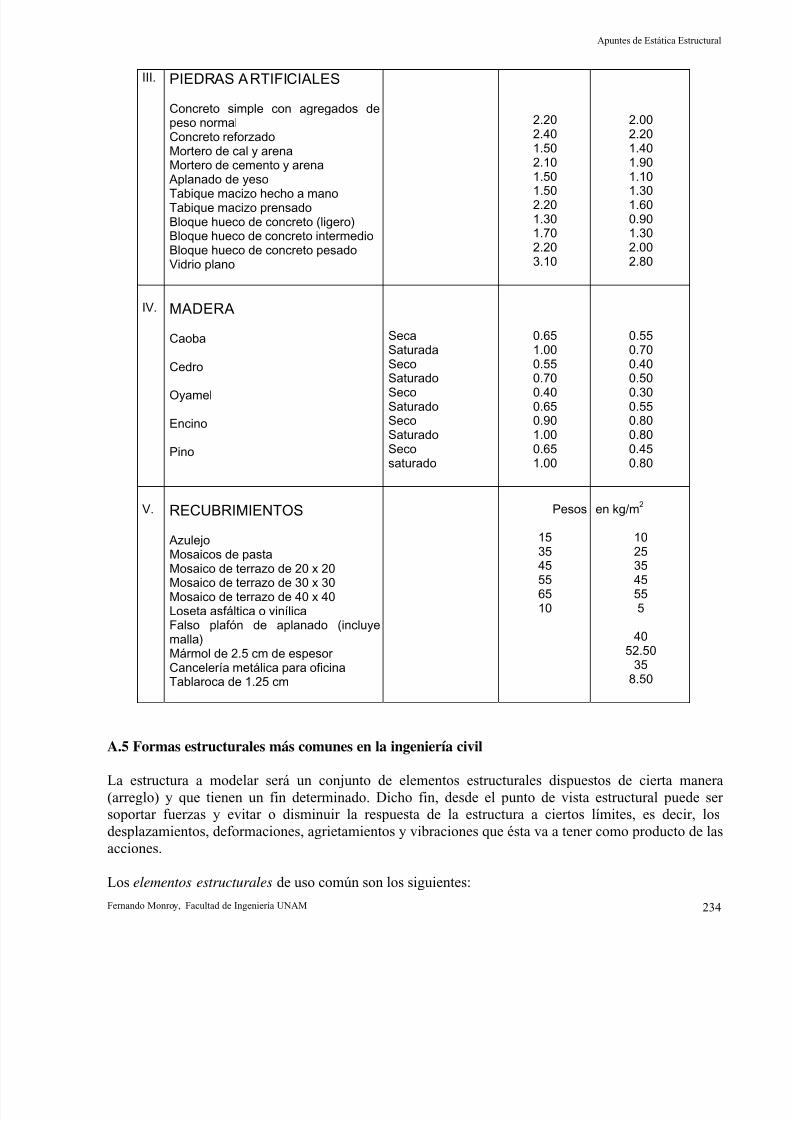
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 241/322
Apuntes de Estática Estructural
III. PIEDRAS ARTIFICIALES
Concreto simple con agregados depeso normalConcreto reforzadoMortero de cal y arenaMortero de cemento y arena
Aplanado de yesoTabique macizo hecho a manoTabique macizo prensadoBloque hueco de concreto (ligero)Bloque hueco de concreto intermedioBloque hueco de concreto pesadoVidrio plano
2.202.401.502.101.50
1.502.201.301.702.203.10
2.002.201.401.901.10
1.301.600.901.302.002.80
IV. MADERA
Caoba
Cedro
Oyamel
Encino
Pino
SecaSaturadaSeco
SaturadoSecoSaturadoSecoSaturadoSecosaturado
0.651.000.55
0.700.400.650.901.000.651.00
0.550.700.40
0.500.300.550.800.800.450.80
V. RECUBRIMIENTOS
AzulejoMosaicos de pasta
Mosaico de terrazo de 20 x 20Mosaico de terrazo de 30 x 30Mosaico de terrazo de 40 x 40Loseta asfáltica o vinílicaFalso plafón de aplanado (incluyemalla)Mármol de 2.5 cm de espesorCancelería metálica para oficinaTablaroca de 1.25 cm
Pesos
1535
45556510
en kg/m2
1025
3545555
4052.50
358.50
A.5 Formas estructurales más comunes en la ingeniería civil
La estructura a modelar será un conjunto de elementos estructurales dispuestos de cierta manera
(arreglo) y que tienen un fin determinado. Dicho fin, desde el punto de vista estructural puede sersoportar fuerzas y evitar o disminuir la respuesta de la estructura a ciertos límites, es decir, los
desplazamientos, deformaciones, agrietamientos y vibraciones que ésta va a tener como producto de las
acciones.
Los elementos estructurales de uso común son los siguientes:
Fernando Monroy, Facultad de Ingeniería UNAM 234
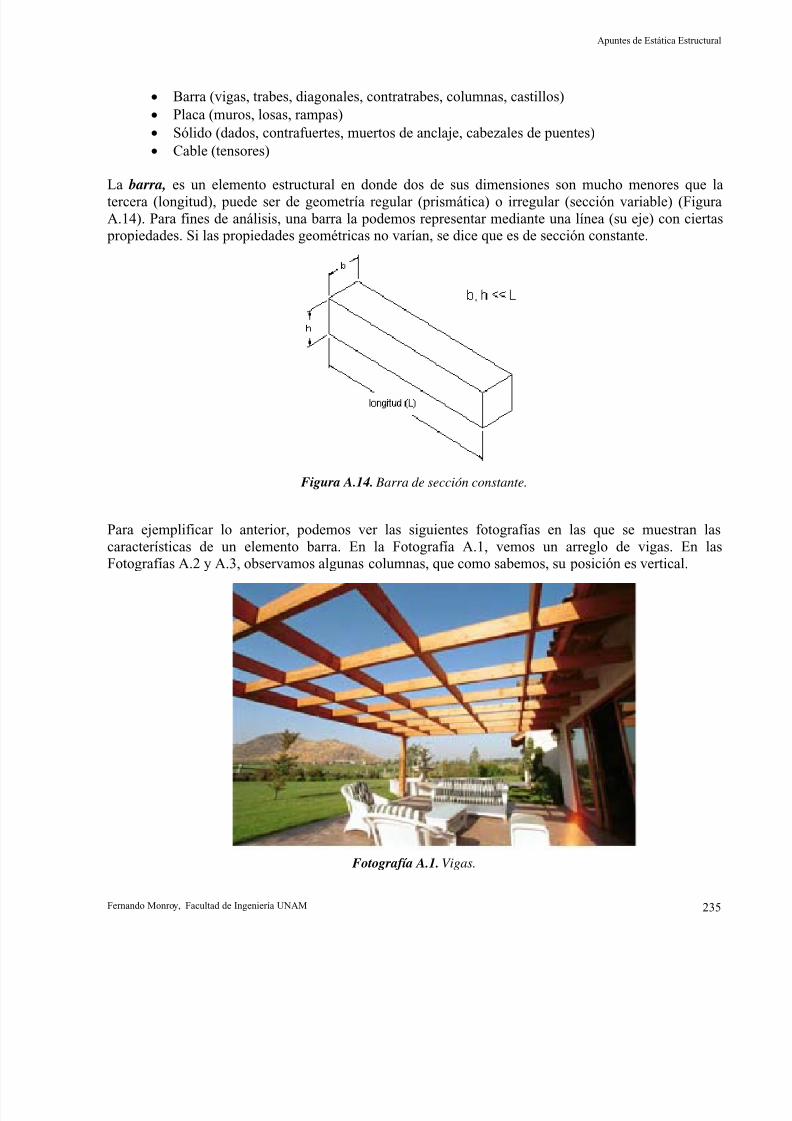
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 242/322
Apuntes de Estática Estructural
• Barra (vigas, trabes, diagonales, contratrabes, columnas, castillos)
• Placa (muros, losas, rampas)
• Sólido (dados, contrafuertes, muertos de anclaje, cabezales de puentes)
• Cable (tensores)
La barra, es un elemento estructural en donde dos de sus dimensiones son mucho menores que latercera (longitud), puede ser de geometría regular (prismática) o irregular (sección variable) (Figura
A.14). Para fines de análisis, una barra la podemos representar mediante una línea (su eje) con ciertas propiedades. Si las propiedades geométricas no varían, se dice que es de sección constante.
Figura A.14. Barra de sección constante.
Para ejemplificar lo anterior, podemos ver las siguientes fotografías en las que se muestran las
características de un elemento barra. En la Fotografía A.1, vemos un arreglo de vigas. En las
Fotografías A.2 y A.3, observamos algunas columnas, que como sabemos, su posición es vertical.
Fotografía A.1. Vigas.
Fernando Monroy, Facultad de Ingeniería UNAM 235
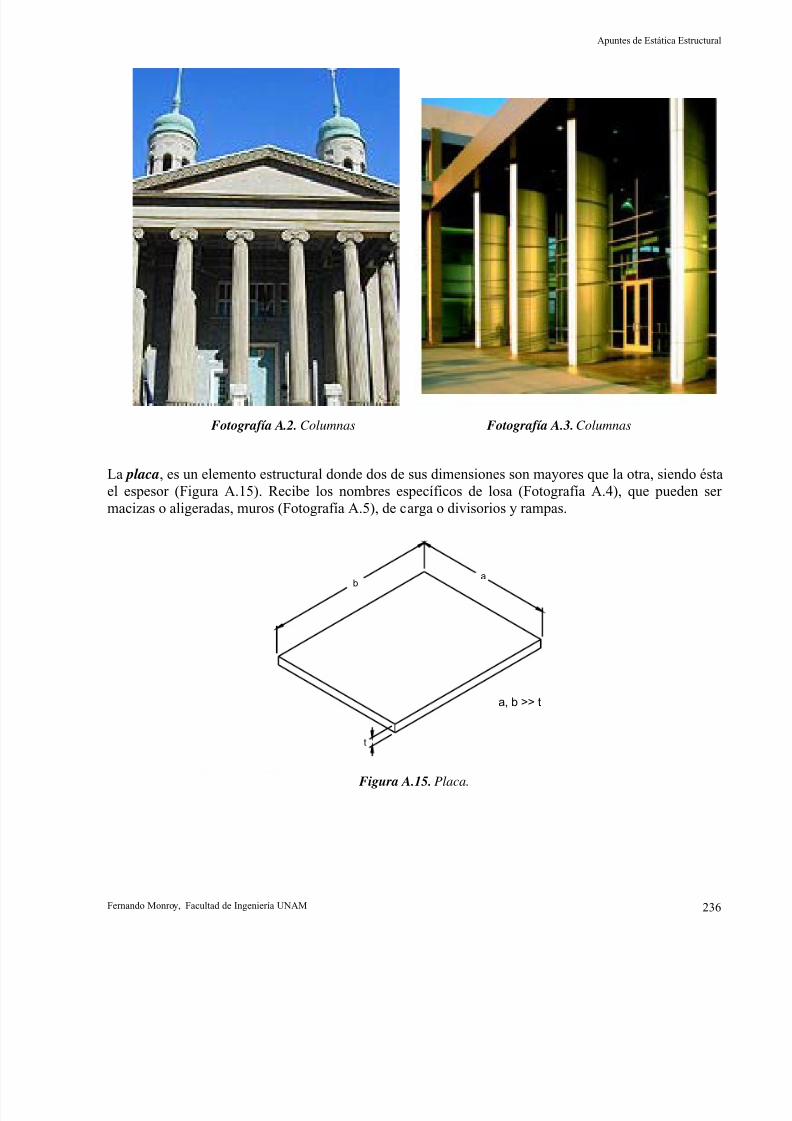
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 243/322
Apuntes de Estática Estructural
Fotografía A.2. Columnas Fotografía A.3. Columnas
La placa, es un elemento estructural donde dos de sus dimensiones son mayores que la otra, siendo ésta
el espesor (Figura A.15). Recibe los nombres específicos de losa (Fotografía A.4), que pueden ser
macizas o aligeradas, muros (Fotografía A.5), de carga o divisorios y rampas.
a, b >> t
t
ab
Figura A.15. Placa.
Fernando Monroy, Facultad de Ingeniería UNAM 236

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 244/322
Apuntes de Estática Estructural
Fotografía A.4. Losa maciza en proceso de construcción Fotografía A.5. Muro de block hueco
Los sólidos, son elementos estructurales en los que ninguna de sus dimensiones es mucho mayor que el
resto de ellas. En las cimentaciones se pueden observar elementos de este tipo como los dados (FiguraA.16.). A algunos sólidos también se les llama muertos de anclaje.
Figura A.16. Dado en cimentación de concreto (referencia 3).
Los cables, se presentan en obras de ingeniería como estructuras o como elementos de sistemas
mecánicos o estructurales, y los podemos encontrar, por ejemplo, en puentes (Fotografía A.6), en
Fernando Monroy, Facultad de Ingeniería UNAM 237
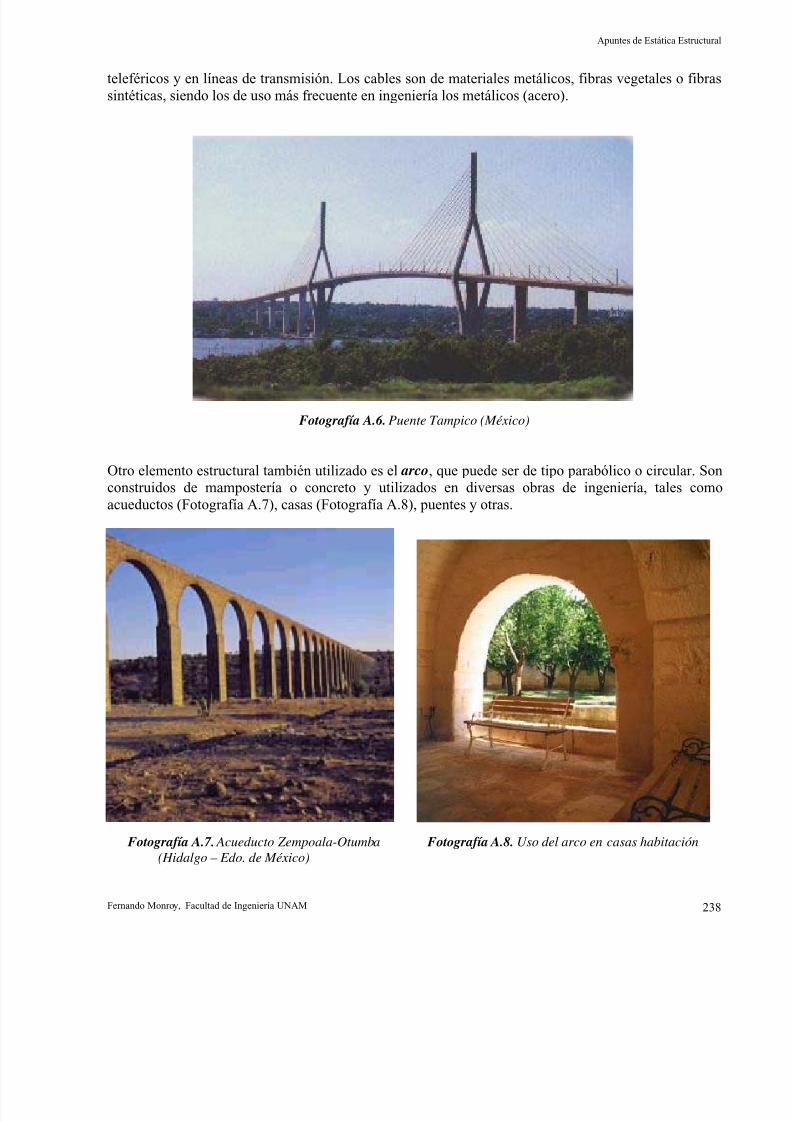
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 245/322
Apuntes de Estática Estructural
teleféricos y en líneas de transmisión. Los cables son de materiales metálicos, fibras vegetales o fibras
sintéticas, siendo los de uso más frecuente en ingeniería los metálicos (acero).
Fotografía A.6. Puente Tampico (México)
Otro elemento estructural también utilizado es el arco, que puede ser de tipo parabólico o circular. Sonconstruidos de mampostería o concreto y utilizados en diversas obras de ingeniería, tales como
acueductos (Fotografía A.7), casas (Fotografía A.8), puentes y otras.
Fotografía A.7. Acueducto Zempoala-Otumba Fotografía A.8. Uso del arco en casas habitación
(Hidalgo – Edo. de México)
Fernando Monroy, Facultad de Ingeniería UNAM 238
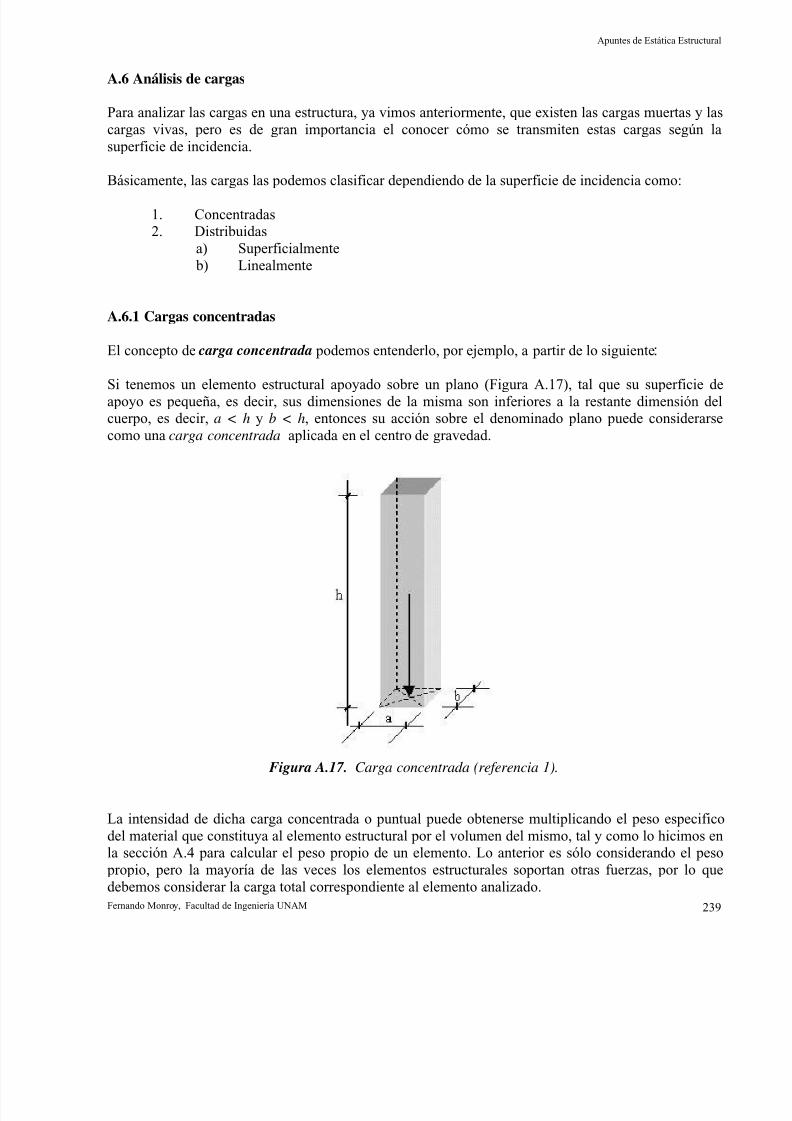
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 246/322
Apuntes de Estática Estructural
A.6 Análisis de cargas
Para analizar las cargas en una estructura, ya vimos anteriormente, que existen las cargas muertas y las
cargas vivas, pero es de gran importancia el conocer cómo se transmiten estas cargas según la
superficie de incidencia.
Básicamente, las cargas las podemos clasificar dependiendo de la superficie de incidencia como:
1. Concentradas2. Distribuidas
a) Superficialmente
b) Linealmente
A.6.1 Cargas concentradas
El concepto de carga concentrada podemos entenderlo, por ejemplo, a partir de lo siguiente:
Si tenemos un elemento estructural apoyado sobre un plano (Figura A.17), tal que su superficie de
apoyo es pequeña, es decir, sus dimensiones de la misma son inferiores a la restante dimensión delcuerpo, es decir, a < h y b < h, entonces su acción sobre el denominado plano puede considerarse
como una carga concentrada aplicada en el centro de gravedad.
Figura A.17. Carga concentrada (referencia 1).
La intensidad de dicha carga concentrada o puntual puede obtenerse multiplicando el peso especifico
del material que constituya al elemento estructural por el volumen del mismo, tal y como lo hicimos enla sección A.4 para calcular el peso propio de un elemento. Lo anterior es sólo considerando el peso
propio, pero la mayoría de las veces los elementos estructurales soportan otras fuerzas, por lo que
debemos considerar la carga total correspondiente al elemento analizado.
Fernando Monroy, Facultad de Ingeniería UNAM 239
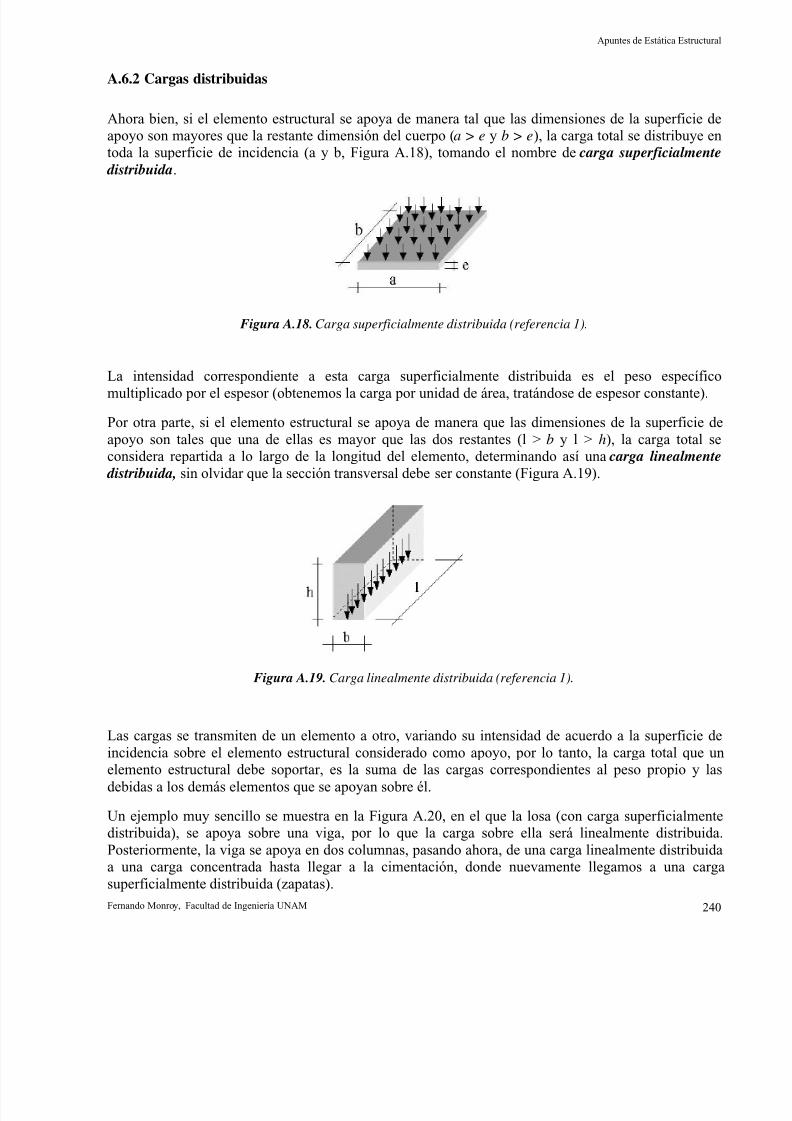
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 247/322
Apuntes de Estática Estructural
A.6.2 Cargas distribuidas
Ahora bien, si el elemento estructural se apoya de manera tal que las dimensiones de la superficie deapoyo son mayores que la restante dimensión del cuerpo (a > e y b > e), la carga total se distribuye entoda la superficie de incidencia (a y b, Figura A.18), tomando el nombre de carga superficialmente
distribuida.
Figura A.18. Carga superficialmente distribuida (referencia 1).
La intensidad correspondiente a esta carga superficialmente distribuida es el peso específicomultiplicado por el espesor (obtenemos la carga por unidad de área, tratándose de espesor constante).
Por otra parte, si el elemento estructural se apoya de manera que las dimensiones de la superficie de
apoyo son tales que una de ellas es mayor que las dos restantes (l > b y l > h), la carga total seconsidera repartida a lo largo de la longitud del elemento, determinando así una carga linealmente
distribuida, sin olvidar que la sección transversal debe ser constante (Figura A.19).
Figura A.19. Carga linealmente distribuida (referencia 1).
Las cargas se transmiten de un elemento a otro, variando su intensidad de acuerdo a la superficie de
incidencia sobre el elemento estructural considerado como apoyo, por lo tanto, la carga total que unelemento estructural debe soportar, es la suma de las cargas correspondientes al peso propio y las
debidas a los demás elementos que se apoyan sobre él.
Un ejemplo muy sencillo se muestra en la Figura A.20, en el que la losa (con carga superficialmentedistribuida), se apoya sobre una viga, por lo que la carga sobre ella será linealmente distribuida.
Posteriormente, la viga se apoya en dos columnas, pasando ahora, de una carga linealmente distribuidaa una carga concentrada hasta llegar a la cimentación, donde nuevamente llegamos a una carga
superficialmente distribuida (zapatas).
Fernando Monroy, Facultad de Ingeniería UNAM 240
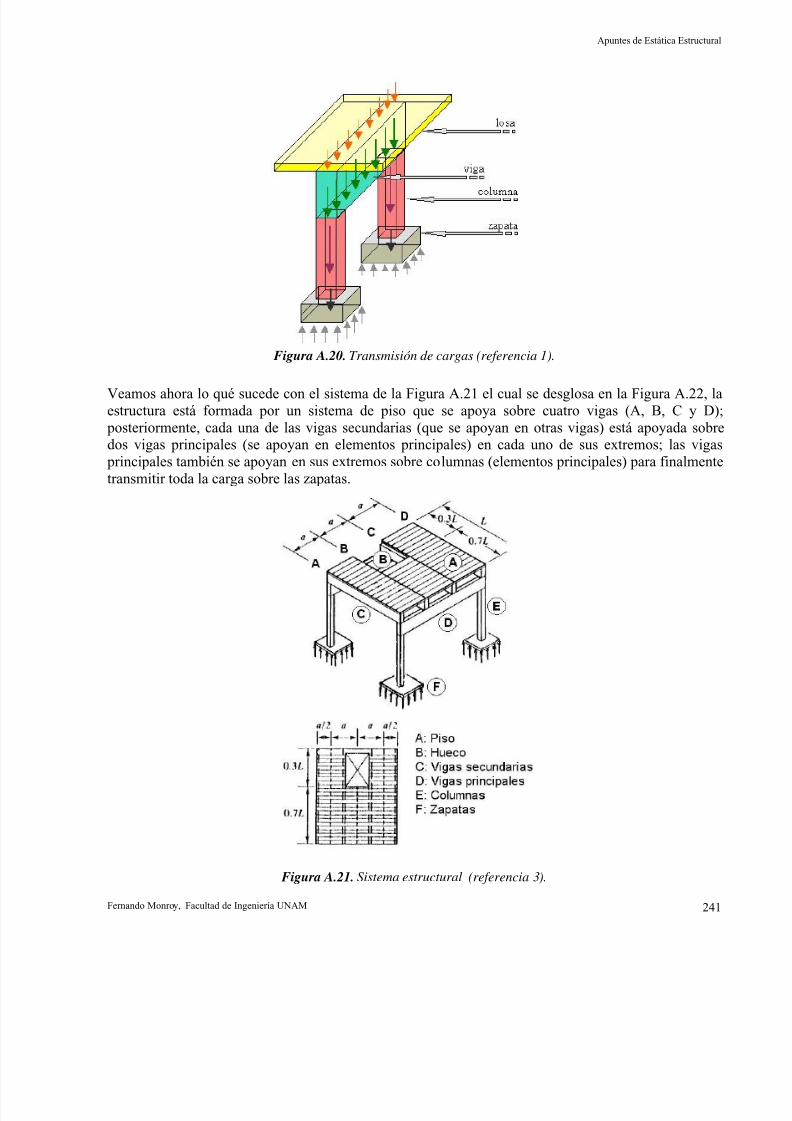
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 248/322
Apuntes de Estática Estructural
Figura A.20. Transmisión de cargas (referencia 1).
Veamos ahora lo qué sucede con el sistema de la Figura A.21 el cual se desglosa en la Figura A.22, la
estructura está formada por un sistema de piso que se apoya sobre cuatro vigas (A, B, C y D);
posteriormente, cada una de las vigas secundarias (que se apoyan en otras vigas) está apoyada sobredos vigas principales (se apoyan en elementos principales) en cada uno de sus extremos; las vigas
principales también se apoyan en sus extremos sobre columnas (elementos principales) para finalmente
transmitir toda la carga sobre las zapatas.
Figura A.21. Sistema estructural (referencia 3).
Fernando Monroy, Facultad de Ingeniería UNAM 241
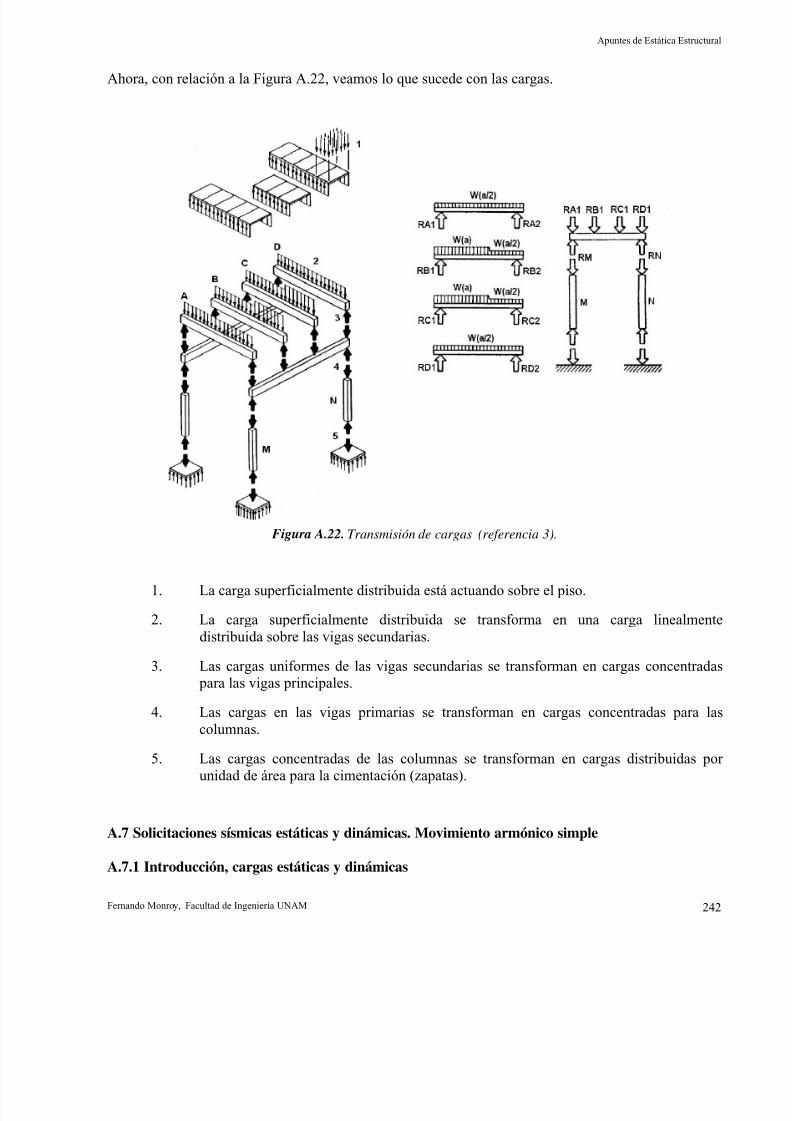
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 249/322
Apuntes de Estática Estructural
Ahora, con relación a la Figura A.22, veamos lo que sucede con las cargas.
Figura A.22. Transmisión de cargas (referencia 3).
1. La carga superficialmente distribuida está actuando sobre el piso.
2. La carga superficialmente distribuida se transforma en una carga linealmente
distribuida sobre las vigas secundarias.
3. Las cargas uniformes de las vigas secundarias se transforman en cargas concentradas para las vigas principales.
4. Las cargas en las vigas primarias se transforman en cargas concentradas para las
columnas.
5. Las cargas concentradas de las columnas se transforman en cargas distribuidas porunidad de área para la cimentación (zapatas).
A.7 Solicitaciones sísmicas estáticas y dinámicas. Movimiento armónico simple
A.7.1 Introducción, cargas estáticas y dinámicas
Fernando Monroy, Facultad de Ingeniería UNAM 242
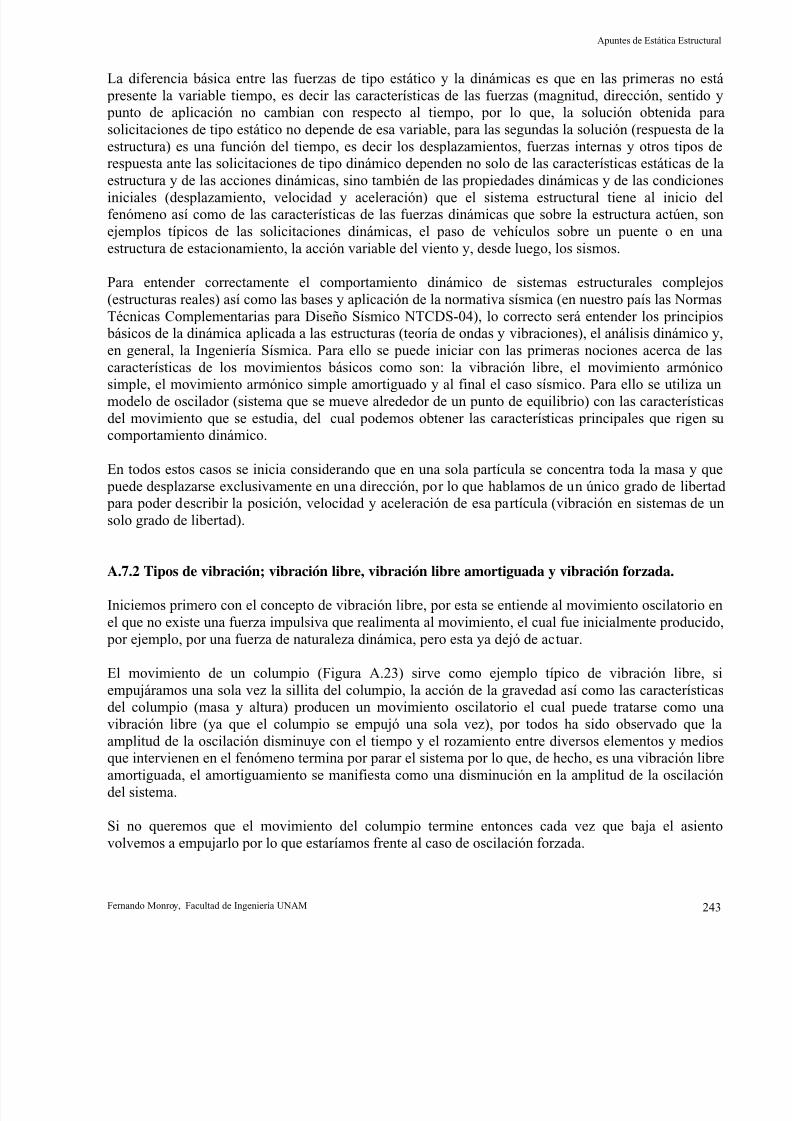
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 250/322
Apuntes de Estática Estructural
La diferencia básica entre las fuerzas de tipo estático y la dinámicas es que en las primeras no está
presente la variable tiempo, es decir las características de las fuerzas (magnitud, dirección, sentido y punto de aplicación no cambian con respecto al tiempo, por lo que, la solución obtenida para
solicitaciones de tipo estático no depende de esa variable, para las segundas la solución (respuesta de la
estructura) es una función del tiempo, es decir los desplazamientos, fuerzas internas y otros tipos derespuesta ante las solicitaciones de tipo dinámico dependen no solo de las características estáticas de la
estructura y de las acciones dinámicas, sino también de las propiedades dinámicas y de las condicionesiniciales (desplazamiento, velocidad y aceleración) que el sistema estructural tiene al inicio delfenómeno así como de las características de las fuerzas dinámicas que sobre la estructura actúen, son
ejemplos típicos de las solicitaciones dinámicas, el paso de vehículos sobre un puente o en una
estructura de estacionamiento, la acción variable del viento y, desde luego, los sismos.
Para entender correctamente el comportamiento dinámico de sistemas estructurales complejos
(estructuras reales) así como las bases y aplicación de la normativa sísmica (en nuestro país las Normas
Técnicas Complementarias para Diseño Sísmico NTCDS-04), lo correcto será entender los principios básicos de la dinámica aplicada a las estructuras (teoría de ondas y vibraciones), el análisis dinámico y,
en general, la Ingeniería Sísmica. Para ello se puede iniciar con las primeras nociones acerca de las
características de los movimientos básicos como son: la vibración libre, el movimiento armónicosimple, el movimiento armónico simple amortiguado y al final el caso sísmico. Para ello se utiliza un
modelo de oscilador (sistema que se mueve alrededor de un punto de equilibrio) con las características
del movimiento que se estudia, del cual podemos obtener las características principales que rigen sucomportamiento dinámico.
En todos estos casos se inicia considerando que en una sola partícula se concentra toda la masa y que
puede desplazarse exclusivamente en una dirección, por lo que hablamos de un único grado de libertad para poder describir la posición, velocidad y aceleración de esa partícula (vibración en sistemas de un
solo grado de libertad).
A.7.2 Tipos de vibración; vibración libre, vibración libre amortiguada y vibración forzada.
Iniciemos primero con el concepto de vibración libre, por esta se entiende al movimiento oscilatorio en
el que no existe una fuerza impulsiva que realimenta al movimiento, el cual fue inicialmente producido,
por ejemplo, por una fuerza de naturaleza dinámica, pero esta ya dejó de actuar.
El movimiento de un columpio (Figura A.23) sirve como ejemplo típico de vibración libre, si
empujáramos una sola vez la sillita del columpio, la acción de la gravedad así como las característicasdel columpio (masa y altura) producen un movimiento oscilatorio el cual puede tratarse como una
vibración libre (ya que el columpio se empujó una sola vez), por todos ha sido observado que la
amplitud de la oscilación disminuye con el tiempo y el rozamiento entre diversos elementos y mediosque intervienen en el fenómeno termina por parar el sistema por lo que, de hecho, es una vibración libre
amortiguada, el amortiguamiento se manifiesta como una disminución en la amplitud de la oscilación
del sistema.
Si no queremos que el movimiento del columpio termine entonces cada vez que baja el asiento
volvemos a empujarlo por lo que estaríamos frente al caso de oscilación forzada.
Fernando Monroy, Facultad de Ingeniería UNAM 243
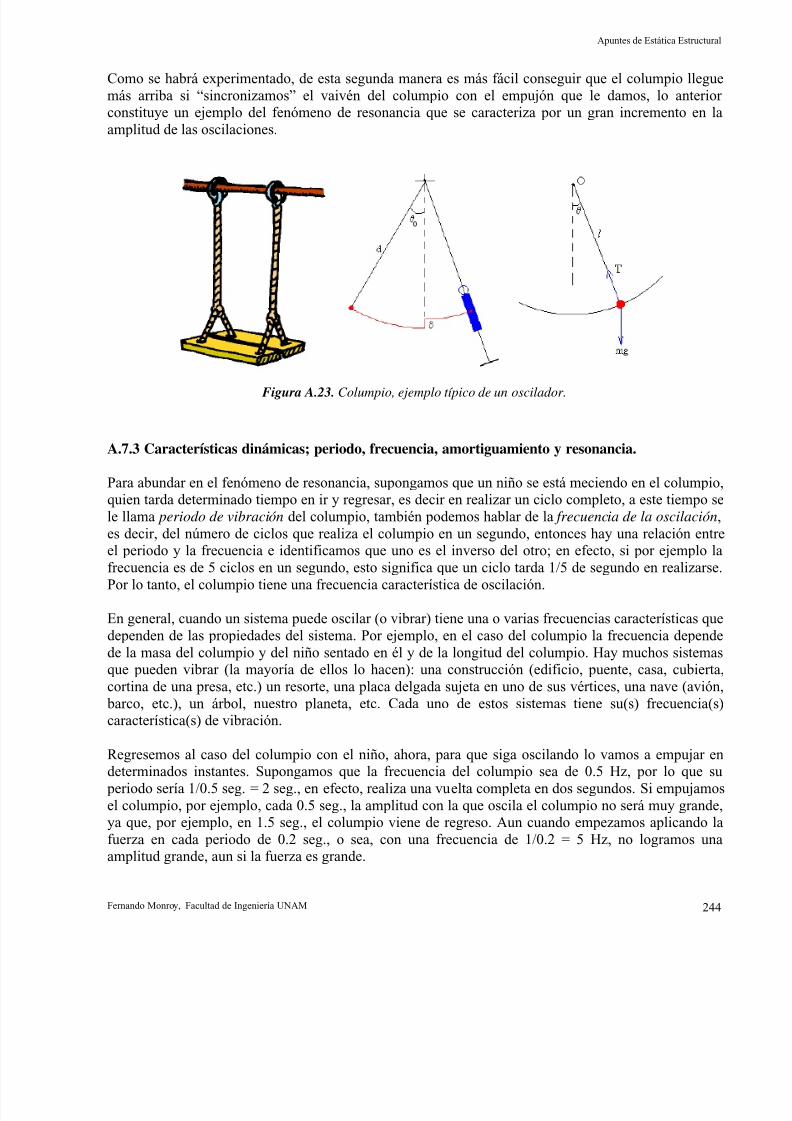
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 251/322
Apuntes de Estática Estructural
Como se habrá experimentado, de esta segunda manera es más fácil conseguir que el columpio llegue
más arriba si “sincronizamos” el vaivén del columpio con el empujón que le damos, lo anteriorconstituye un ejemplo del fenómeno de resonancia que se caracteriza por un gran incremento en la
amplitud de las oscilaciones.
Figura A.23. Columpio, ejemplo típico de un oscilador.
A.7.3 Características dinámicas; periodo, frecuencia, amortiguamiento y resonancia.
Para abundar en el fenómeno de resonancia, supongamos que un niño se está meciendo en el columpio,quien tarda determinado tiempo en ir y regresar, es decir en realizar un ciclo completo, a este tiempo se
le llama periodo de vibración del columpio, también podemos hablar de la frecuencia de la oscilación,
es decir, del número de ciclos que realiza el columpio en un segundo, entonces hay una relación entreel periodo y la frecuencia e identificamos que uno es el inverso del otro; en efecto, si por ejemplo la
frecuencia es de 5 ciclos en un segundo, esto significa que un ciclo tarda 1/5 de segundo en realizarse.Por lo tanto, el columpio tiene una frecuencia característica de oscilación.
En general, cuando un sistema puede oscilar (o vibrar) tiene una o varias frecuencias características que
dependen de las propiedades del sistema. Por ejemplo, en el caso del columpio la frecuencia depende
de la masa del columpio y del niño sentado en él y de la longitud del columpio. Hay muchos sistemasque pueden vibrar (la mayoría de ellos lo hacen): una construcción (edificio, puente, casa, cubierta,
cortina de una presa, etc.) un resorte, una placa delgada sujeta en uno de sus vértices, una nave (avión,
barco, etc.), un árbol, nuestro planeta, etc. Cada uno de estos sistemas tiene su(s) frecuencia(s)característica(s) de vibración.
Regresemos al caso del columpio con el niño, ahora, para que siga oscilando lo vamos a empujar endeterminados instantes. Supongamos que la frecuencia del columpio sea de 0.5 Hz, por lo que su
periodo sería 1/0.5 seg. = 2 seg., en efecto, realiza una vuelta completa en dos segundos. Si empujamos
el columpio, por ejemplo, cada 0.5 seg., la amplitud con la que oscila el columpio no será muy grande,ya que, por ejemplo, en 1.5 seg., el columpio viene de regreso. Aun cuando empezamos aplicando la
fuerza en cada periodo de 0.2 seg., o sea, con una frecuencia de 1/0.2 = 5 Hz, no logramos unaamplitud grande, aun si la fuerza es grande.
Fernando Monroy, Facultad de Ingeniería UNAM 244
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 252/322
Apuntes de Estática Estructural
Si alguna vez hemos empujado a un niño en un columpio sabemos que se puede lograr una amplitud
bastante grande si lo impulsamos cada vez que termina un ciclo, que en nuestro caso sería cada 2 seg.Por lo tanto, si hacemos esto último estaremos aplicando sobre el columpio una fuerza también
periódica con una frecuencia igual a 0.5 Hz, que es precisamente la frecuencia característica de
oscilación del columpio.
Lo anterior ilustra un hecho muy importante. Si a un sistema que oscila se le aplica una fuerza externatambién periódica, entonces la amplitud de la oscilación del sistema dependerá de la frecuencia de la
fuerza externa. Si esta frecuencia es distinta de las frecuencias características del sistema, entonces laamplitud de la oscilación resultante será relativamente pequeña, pero si la frecuencia de la fuerza
externa es igual a alguna de las frecuencias características del sistema, entonces la amplitud resultante
será muy grande. En este caso se dice que la fuerza externa ha entrado en resonancia con el sistema.
En la resonancia la amplitud de la oscilación es muy grande. Esto quiere decir que el sistema se aleja
mucho de la posición de equilibrio. Por ejemplo, en el caso de un resorte, si se le aplica una fuerza periódica que tenga la misma frecuencia que la del resorte, éste se estirará tanto que llegará un
momento en que se romperá. Este hecho es general: si un sistema estructural entra en resonancia puede
ocurrir que se colapse ya que posiblemente el sistema no sea capaz de resistir las fuerzas asociadas aesas grandes oscilaciones.
Por lo anterior, cuando se diseñan estructuras dinámicamente es importante hacerlo de manera que sus
frecuencias características sean tales que estén lo más lejanas posibles de las frecuencias de las perturbaciones a las que la estructura pueda estar sujeta, como por ejemplo vientos, terremotos,
etcétera.
Una aplicación práctica de la resonancia es cuando un pelotón de soldados está marchando y va a
cruzar un puente, los soldados deben de romper la marcha ya que, de no hacerlo, los golpes que dan almarchar podrían tener componentes con una frecuencia igual a alguna de las frecuencias características
del puente. Al romper la marcha evitan que haya resonancia y con ello el posible colapso del puente
debido a este fenómeno.
Un caso desafortunado fue el del terremoto que sacudió a la ciudad de México en 1985, el cual tuvo,
dentro de sus frecuencias, algunas de 0.5 Hz (periodo de 2 seg.), algunos edificios tenían entre sus
frecuencias naturales una de valor de alrededor de 0.5 Hz, por lo que entraron en resonancia con elterremoto; sus amplitudes de oscilación crecieron a tal grado que los elementos de soporte de algunos
de ellos fueron incapaces de resistir esas amplitudes y se colapsaron. Desde luego que la resonancia no
fue la única causa por la que muchas desafortunadas estructuras se derrumbaron a consecuencia de esedevastador terremoto.
A.7.4 Características de los modelos de osciladores
En general, un sistema vibratorio consta de elementos que almacenan energía potencial (resortes
elásticos), elementos que almacenan energía cinética (masa o inercia) y medios por los que se pierde odisipa gradualmente esa energía (amortiguamiento interno o externo –artificial, Figura A.24–).
Fernando Monroy, Facultad de Ingeniería UNAM 245
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 253/322
Apuntes de Estática Estructural
Figura A.24. Uso de elementos de protección sísmica (disipadores) en un edificio de departamentos sobre la
costera Miguel Alemán, Acapulco Gro., México.
La vibración de un sistema implica la transformación de su energía potencial a cinética y de la energía
cinética a potencial alternativamente, si el sistema es amortiguado, parte de la energía se disipa en cada
ciclo de vibración y, para que la vibración se mantenga esa energía debe de ser reemplazada por unafuente externa al sistema.
Las principales características de los modelos son:
a) Oscilador en vibración libre no amortiguada
Este es el oscilador más sencillo, queda definido por las siguientes características mecánicas (verFigura A.25):
• Masa m, la cual suponemos concentrada en un punto.
• Rigidez K , en este caso se identifica con la rigidez de la barra que une a la masa con el suelo. Larigidez produce una fuerza recuperadora del movimiento, que en nuestro caso consideraremos
elástica y lineal ( f e=Kx). En estructuras de edificios K se obtendrá a partir de las característicasde sus elementos (trabes, columnas y muros, principalmente).
Fernando Monroy, Facultad de Ingeniería UNAM 246
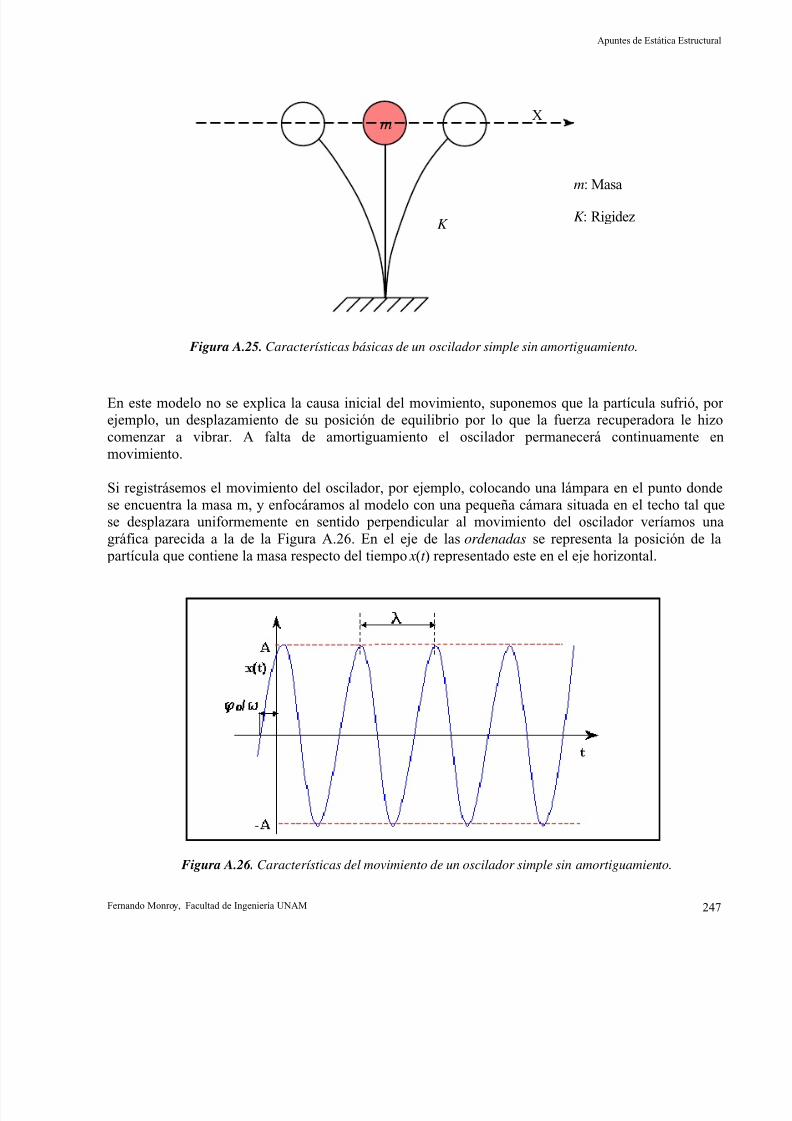
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 254/322
Apuntes de Estática Estructural
X
K
m: Masa
K : Rigidez
m
Figura A.25. Características básicas de un oscilador simple sin amortiguamiento.
En este modelo no se explica la causa inicial del movimiento, suponemos que la partícula sufrió, porejemplo, un desplazamiento de su posición de equilibrio por lo que la fuerza recuperadora le hizo
comenzar a vibrar. A falta de amortiguamiento el oscilador permanecerá continuamente en
movimiento.
Si registrásemos el movimiento del oscilador, por ejemplo, colocando una lámpara en el punto donde
se encuentra la masa m, y enfocáramos al modelo con una pequeña cámara situada en el techo tal quese desplazara uniformemente en sentido perpendicular al movimiento del oscilador veríamos una
gráfica parecida a la de la Figura A.26. En el eje de las ordenadas se representa la posición de la
partícula que contiene la masa respecto del tiempo x(t ) representado este en el eje horizontal.
Figura A.26. Características del movimiento de un oscilador simple sin amortiguamiento.
Fernando Monroy, Facultad de Ingeniería UNAM 247
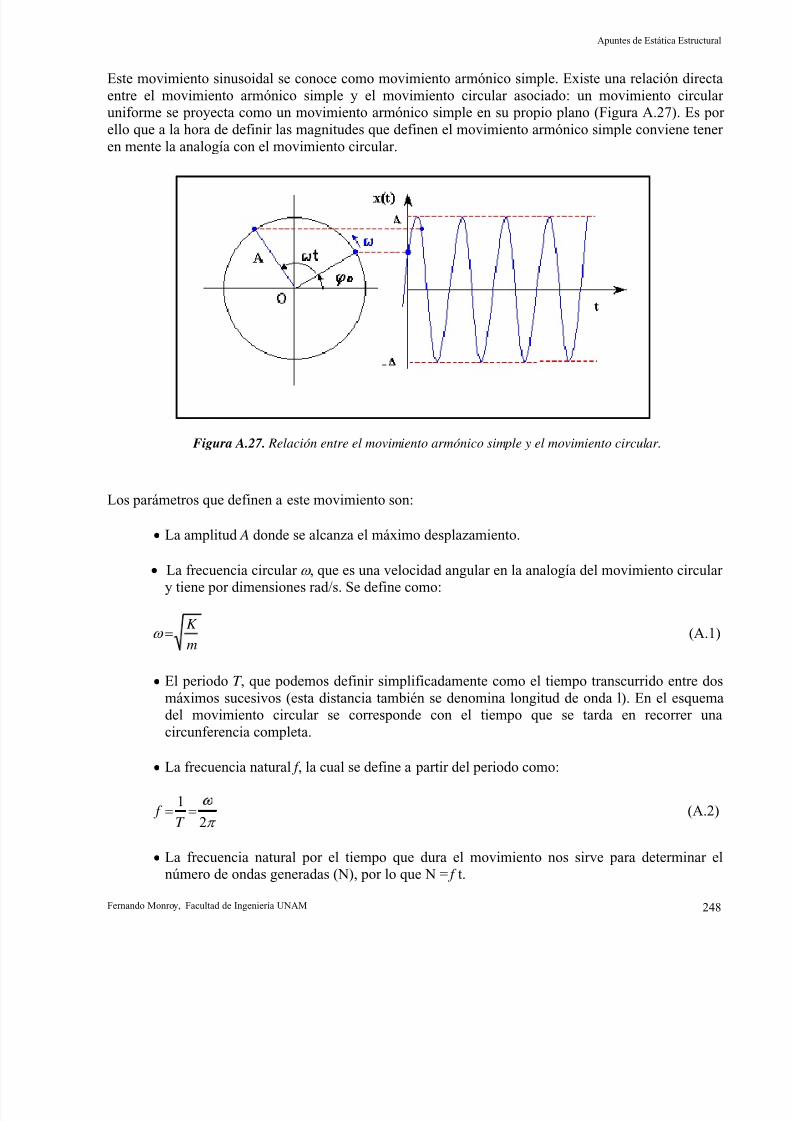
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 255/322
Apuntes de Estática Estructural
Este movimiento sinusoidal se conoce como movimiento armónico simple. Existe una relación directa
entre el movimiento armónico simple y el movimiento circular asociado: un movimiento circularuniforme se proyecta como un movimiento armónico simple en su propio plano (Figura A.27). Es por
ello que a la hora de definir las magnitudes que definen el movimiento armónico simple conviene tener
en mente la analogía con el movimiento circular.
Figura A.27. Relación entre el movimiento armónico simple y el movimiento circular.
Los parámetros que definen a este movimiento son:
• La amplitud A donde se alcanza el máximo desplazamiento.
• La frecuencia circular ω , que es una velocidad angular en la analogía del movimiento circulary tiene por dimensiones rad/s. Se define como:
m
K =ω (A.1)
• El periodo T , que podemos definir simplificadamente como el tiempo transcurrido entre dos
máximos sucesivos (esta distancia también se denomina longitud de onda l). En el esquemadel movimiento circular se corresponde con el tiempo que se tarda en recorrer una
circunferencia completa.
• La frecuencia natural f , la cual se define a partir del periodo como:
π 2
1==
T f (A.2)
• La frecuencia natural por el tiempo que dura el movimiento nos sirve para determinar elnúmero de ondas generadas (N), por lo que N = f t.
Fernando Monroy, Facultad de Ingeniería UNAM 248
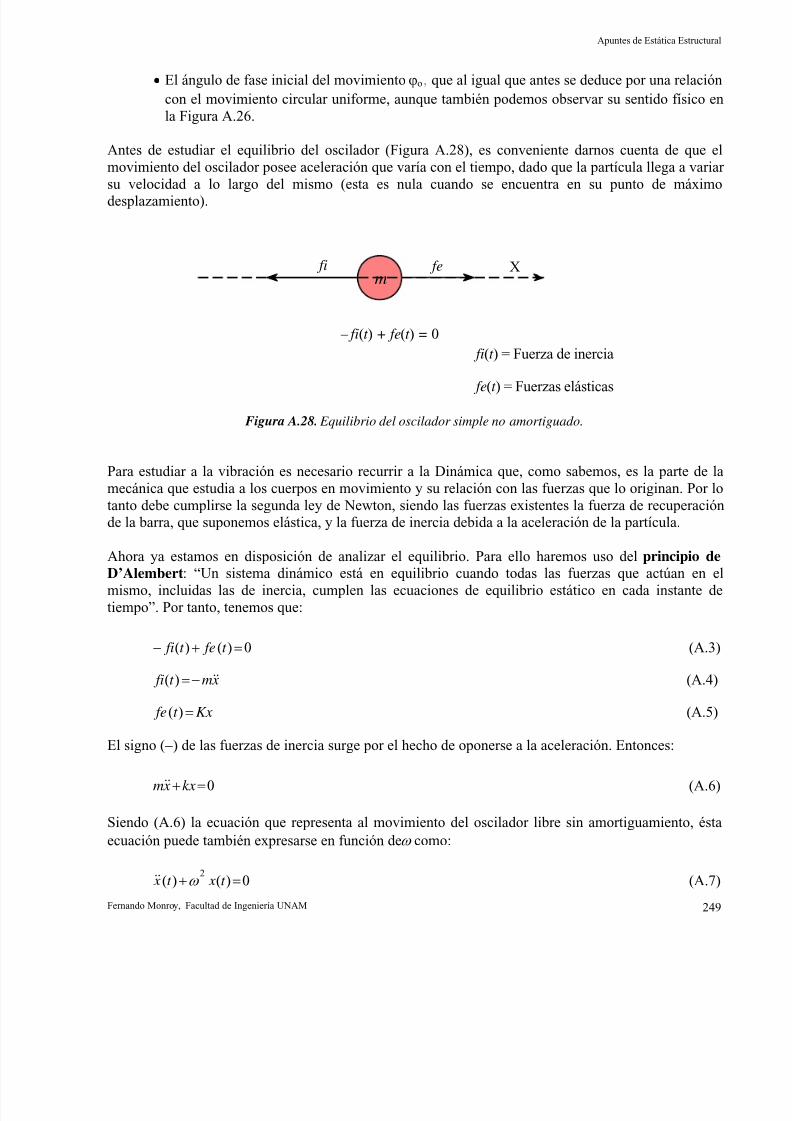
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 256/322
Apuntes de Estática Estructural
• El ángulo de fase inicial del movimiento ϕo, que al igual que antes se deduce por una relación
con el movimiento circular uniforme, aunque también podemos observar su sentido físico en
la Figura A.26.
Antes de estudiar el equilibrio del oscilador (Figura A.28), es conveniente darnos cuenta de que el
movimiento del oscilador posee aceleración que varía con el tiempo, dado que la partícula llega a variar
su velocidad a lo largo del mismo (esta es nula cuando se encuentra en su punto de máximodesplazamiento).
X fi
fi(t ) = Fuerza de inercia
fe(t ) = Fuerzas elásticas
m fe
− fi(t ) + fe(t ) = 0
Figura A.28. Equilibrio del oscilador simple no amortiguado.
Para estudiar a la vibración es necesario recurrir a la Dinámica que, como sabemos, es la parte de la
mecánica que estudia a los cuerpos en movimiento y su relación con las fuerzas que lo originan. Por lo
tanto debe cumplirse la segunda ley de Newton, siendo las fuerzas existentes la fuerza de recuperaciónde la barra, que suponemos elástica, y la fuerza de inercia debida a la aceleración de la partícula.
Ahora ya estamos en disposición de analizar el equilibrio. Para ello haremos uso del principio deD’Alembert: “Un sistema dinámico está en equilibrio cuando todas las fuerzas que actúan en el
mismo, incluidas las de inercia, cumplen las ecuaciones de equilibrio estático en cada instante de
tiempo”. Por tanto, tenemos que:
0)()( =+− t fet fi (A.3)
xmt fi &&−=)( (A.4)
Kxt fe =)( (A.5)
El signo (−) de las fuerzas de inercia surge por el hecho de oponerse a la aceleración. Entonces:
(A.6)0=+kx xm &&
Siendo (A.6) la ecuación que representa al movimiento del oscilador libre sin amortiguamiento, ésta
ecuación puede también expresarse en función deω como:
0 (A.7))()(2
=+ t xt x ω &&
Fernando Monroy, Facultad de Ingeniería UNAM 249
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 257/322
Apuntes de Estática Estructural
Para el problema de vibración libre, relativamente simple, no es difícil comprender que la solución será
armónica. Esto se puede verificar sustituyendo una función ya sea exponencial o trigonométrica, como
solución de prueba de la ecuación homogénea, por ejemplo, consideremos:
(A.8)rt
Ce x=
Cuya primera y segunda derivada son:
rt rCe x=& (A.9)
rt Cer x
2=&& (A.10)
Sustituyendo en la ecuación A.6 tenemos:
(A.6)0=+ kx xm &&
0 (A.11)2 =+ rt rt
kCeCemr
0 (A.12)2
=+ k mr
La sustitución muestra que, la solución de prueba es una integral de la ecuación diferencial si se
satisface la siguiente ecuación característica.
02
=+m
k r (A.13)
La ecuación característica tiene dos raíces, las cuales están dadas por la siguiente expresión
22
2,1 nn im
k r ω ω ±=−±=−±= (A.14)
La cantidad mk / , es la frecuencia del movimiento armónico, en radianes por segundo, y por lo
general, se le denomina frecuencia circular natural ω n. Las raíces de la ecuación característica sedenominan valores característicos, valores propios, eigenvalores o autovalores.
Las siguientes son dos integrales particulares que satisfacen la ecuación A.6
(A.15)t i
t i
n
n
eC x
eC x
ω
ω
−=
=
22
11
Si sustituimos ambas soluciones en la ecuación A.6 y la suma satisface también la ecuación de
movimiento y tiene el número requerido de constantes arbitrarias, entonces, la solución general es:
Fernando Monroy, Facultad de Ingeniería UNAM 250
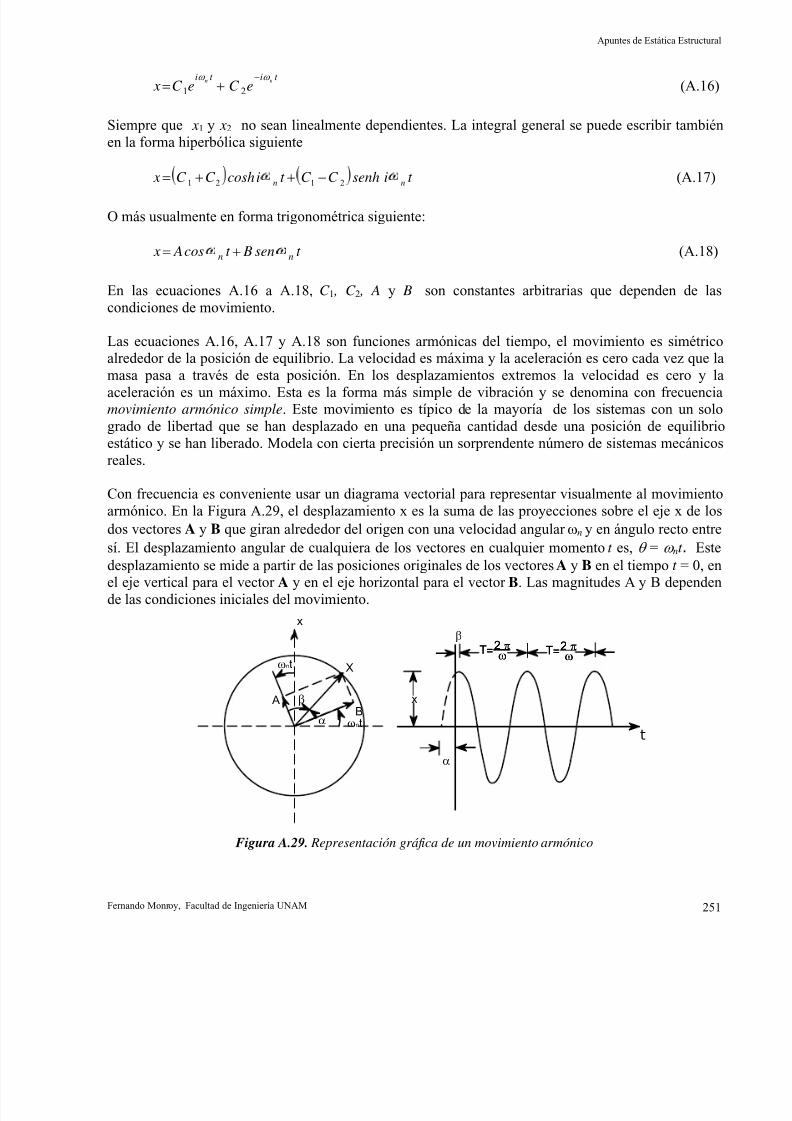
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 258/322
Apuntes de Estática Estructural
(A.16)t it i nn
eC eC xω ω −
+= 21
Siempre que x1 y x2 no sean linealmente dependientes. La integral general se puede escribir también
en la forma hiperbólica siguiente
t isenhC C t icoshC C x nn 2121 −++= (A.17)
O más usualmente en forma trigonométrica siguiente:
t sen Bt cos A x nn += (A.18)
En las ecuaciones A.16 a A.18, C 1 , C 2 , A y B son constantes arbitrarias que dependen de las
condiciones de movimiento.
Las ecuaciones A.16, A.17 y A.18 son funciones armónicas del tiempo, el movimiento es simétricoalrededor de la posición de equilibrio. La velocidad es máxima y la aceleración es cero cada vez que la
masa pasa a través de esta posición. En los desplazamientos extremos la velocidad es cero y laaceleración es un máximo. Esta es la forma más simple de vibración y se denomina con frecuenciamovimiento armónico simple. Este movimiento es típico de la mayoría de los sistemas con un solo
grado de libertad que se han desplazado en una pequeña cantidad desde una posición de equilibrio
estático y se han liberado. Modela con cierta precisión un sorprendente número de sistemas mecánicos
reales.
Con frecuencia es conveniente usar un diagrama vectorial para representar visualmente al movimiento
armónico. En la Figura A.29, el desplazamiento x es la suma de las proyecciones sobre el eje x de los
dos vectores A y B que giran alrededor del origen con una velocidad angular ωn y en ángulo recto entre
sí. El desplazamiento angular de cualquiera de los vectores en cualquier momento t es, θ = ω nt . Este
desplazamiento se mide a partir de las posiciones originales de los vectores A y B en el tiempo t = 0, enel eje vertical para el vector A y en el eje horizontal para el vector B. Las magnitudes A y B dependen
de las condiciones iniciales del movimiento.
A
β
ωnt
x
B
t
α
X
β x
α
ω=T
ωnt
2 πω=T 2 π
ω=T 2 πω=T 2 π
Figura A.29. Representación gráfica de un movimiento armónico
Fernando Monroy, Facultad de Ingeniería UNAM 251

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 259/322
Apuntes de Estática Estructural
Se llama un ciclo al movimiento completo llevado a cabo en cualquier tiempo, e inversamente, el
periodo T es el tiempo necesario para completar un ciclo de movimiento, así tenemos
π 2=T n
De donde
m
k T
n
π
ω
π 22==
k
mT π 2= (A.19)
k
mT f n
π 2
11==
m
k f n ==
π 2
1 (A.20)
ωn = frecuencia circular natural
ƒn = frecuencia natural
Algunas veces es conveniente describir al periodo del movimiento armónico, que generalmente se da
en segundos, y otras es conveniente hablar de la frecuencia del movimiento, es decir, del número deciclos que se completa en cualquier unidad de tiempo. La unidad conveniente para la frecuencia es el
hertz (Hz) que es un ciclo por segundo (cps). EL uso del hertz es una práctica normalizada en muchos
países europeos y se aplica ampliamente en la electrónica, acústica y en la mayor parte de los camposcientíficos relacionados con el estudio de las vibraciones. Para la frecuencia natural de un sistema
vibratorio se usa el símbolo ƒn.
La ecuación A.18 está limitada a dos constantes arbitrarias, pero éstas no necesitan ser ambasamplitudes. A veces es más conveniente pensar en términos de una amplitud, y de un ángulo de fase,
con referencia a la Figura A.29
α += t sen X x n (A.21)
β −= t cos X x n (A.22)
Los desplazamientos α +t n y β −t n se miden a partir de los ejes horizontal y vertical
respectivamente, que, otra vez, son las posiciones generales para la iniciación del movimiento de los
vectores A y B. X, α y β son nuevas constantes arbitrarias que se pueden describir en términos de A
y B. El término X es la amplitud máxima o valor pico del desplazamiento.Fernando Monroy, Facultad de Ingeniería UNAM 252
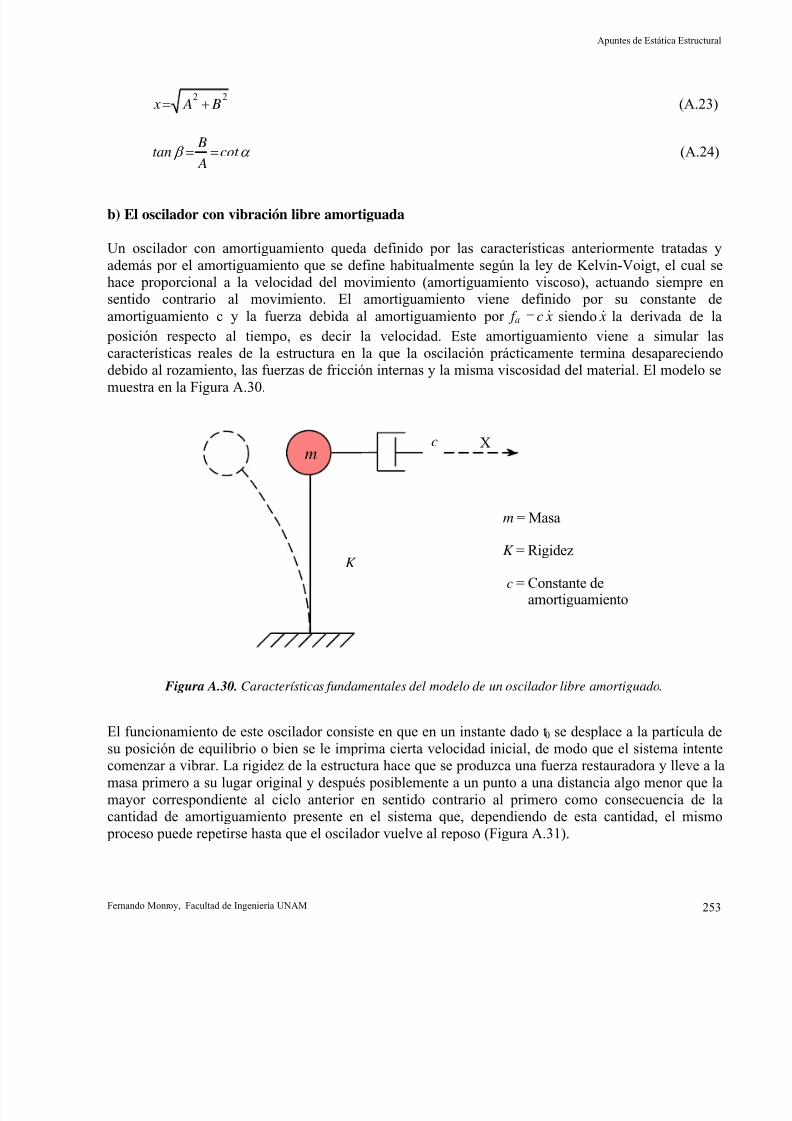
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 260/322
Apuntes de Estática Estructural
22 B A x += (A.23)
α β cot A
Btan == (A.24)
b) El oscilador con vibración libre amortiguada
Un oscilador con amortiguamiento queda definido por las características anteriormente tratadas y
además por el amortiguamiento que se define habitualmente según la ley de Kelvin-Voigt, el cual sehace proporcional a la velocidad del movimiento (amortiguamiento viscoso), actuando siempre ensentido contrario al movimiento. El amortiguamiento viene definido por su constante de
amortiguamiento c y la fuerza debida al amortiguamiento por f a = siendo la derivada de la
posición respecto al tiempo, es decir la velocidad. Este amortiguamiento viene a simular las
características reales de la estructura en la que la oscilación prácticamente termina desapareciendo
debido al rozamiento, las fuerzas de fricción internas y la misma viscosidad del material. El modelo semuestra en la Figura A.30.
xc & x&
X
m = Masa
K = Rigidez
c = Constante de amortiguamiento
mc
K
Figura A.30. Características fundamentales del modelo de un oscilador libre amortiguado.
El funcionamiento de este oscilador consiste en que en un instante dado t0 se desplace a la partícula de
su posición de equilibrio o bien se le imprima cierta velocidad inicial, de modo que el sistema intentecomenzar a vibrar. La rigidez de la estructura hace que se produzca una fuerza restauradora y lleve a la
masa primero a su lugar original y después posiblemente a un punto a una distancia algo menor que la
mayor correspondiente al ciclo anterior en sentido contrario al primero como consecuencia de lacantidad de amortiguamiento presente en el sistema que, dependiendo de esta cantidad, el mismo
proceso puede repetirse hasta que el oscilador vuelve al reposo (Figura A.31).
Fernando Monroy, Facultad de Ingeniería UNAM 253
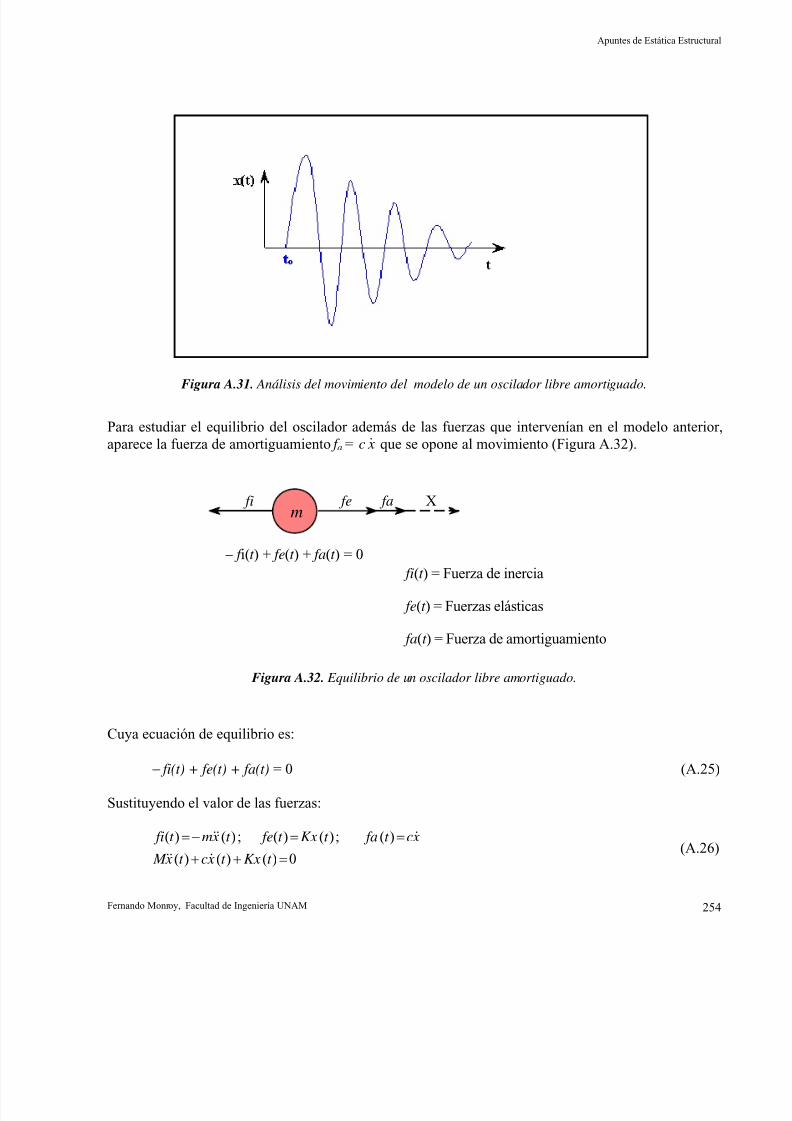
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 261/322
Apuntes de Estática Estructural
Figura A.31. Análisis del movimiento del modelo de un oscilador libre amortiguado.
Para estudiar el equilibrio del oscilador además de las fuerzas que intervenían en el modelo anterior,
aparece la fuerza de amortiguamiento f a = que se opone al movimiento (Figura A.32). xc &
X fi
fi(t ) = Fuerza de inercia
fe(t ) = Fuerzas elásticas
fa(t ) = Fuerza de amortiguamiento
fe
− f i(t ) + fe(t ) + fa(t ) = 0
m fa
Figura A.32. Equilibrio de un oscilador libre amortiguado.
Cuya ecuación de equilibrio es:
− fi(t) + fe(t) + fa(t) = 0 (A.25)
Sustituyendo el valor de las fuerzas:
0)()()(
)(;)()(;)()(
=++
==−=
t Kxt xct x M
xct fat Kxt fet xmt fi
&&&
&&&
(A.26)
Fernando Monroy, Facultad de Ingeniería UNAM 254
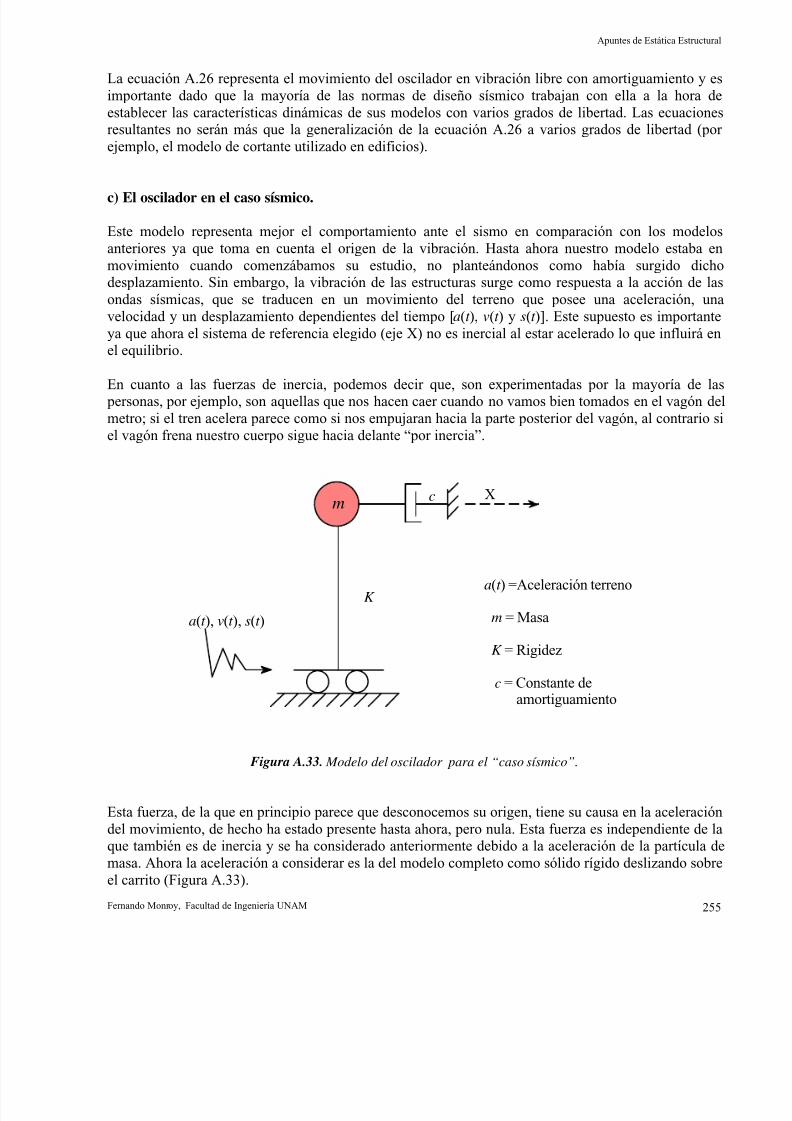
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 262/322
Apuntes de Estática Estructural
La ecuación A.26 representa el movimiento del oscilador en vibración libre con amortiguamiento y es
importante dado que la mayoría de las normas de diseño sísmico trabajan con ella a la hora de
establecer las características dinámicas de sus modelos con varios grados de libertad. Las ecuacionesresultantes no serán más que la generalización de la ecuación A.26 a varios grados de libertad (por
ejemplo, el modelo de cortante utilizado en edificios).
c) El oscilador en el caso sísmico.
Este modelo representa mejor el comportamiento ante el sismo en comparación con los modelos
anteriores ya que toma en cuenta el origen de la vibración. Hasta ahora nuestro modelo estaba en
movimiento cuando comenzábamos su estudio, no planteándonos como había surgido dichodesplazamiento. Sin embargo, la vibración de las estructuras surge como respuesta a la acción de las
ondas sísmicas, que se traducen en un movimiento del terreno que posee una aceleración, una
velocidad y un desplazamiento dependientes del tiempo [a(t ), v(t ) y s(t )]. Este supuesto es importante
ya que ahora el sistema de referencia elegido (eje X) no es inercial al estar acelerado lo que influirá enel equilibrio.
En cuanto a las fuerzas de inercia, podemos decir que, son experimentadas por la mayoría de las personas, por ejemplo, son aquellas que nos hacen caer cuando no vamos bien tomados en el vagón del
metro; si el tren acelera parece como si nos empujaran hacia la parte posterior del vagón, al contrario si
el vagón frena nuestro cuerpo sigue hacia delante “por inercia”.
X
a(t ) =Aceleración terreno
m = Masa
K = Rigidez
c = Constante de amortiguamiento
mc
K
a(t ), v(t ), s(t )
Figura A.33. Modelo del oscilador para el “caso sísmico”.
Esta fuerza, de la que en principio parece que desconocemos su origen, tiene su causa en la aceleración
del movimiento, de hecho ha estado presente hasta ahora, pero nula. Esta fuerza es independiente de laque también es de inercia y se ha considerado anteriormente debido a la aceleración de la partícula de
masa. Ahora la aceleración a considerar es la del modelo completo como sólido rígido deslizando sobre
el carrito (Figura A.33).
Fernando Monroy, Facultad de Ingeniería UNAM 255
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 263/322
Apuntes de Estática Estructural
A partir del equilibrio podemos notar que el diagrama de fuerzas es el mismo que el del modelo
anterior, sólo que en las fuerzas de inercia se incluirá un nuevo término que hace referencia a la nuevaaceleración, por lo que la ecuación de equilibrio es:
− fi(t) + fe(t) + fa(t) = 0 (A.27)
Sustituyendo el valor de las fuerzas:
[ ] xct fat Kxt fet at xmt fi &&& ==+−= )(;)()(;)()()( (A.28)
)()()()( t mat Kxt xct xm −=++ &&&
La ecuación anterior define el movimiento para el caso sísmico.
Es importante comentar que los modelos anteriores pese a su sencillez (dado que tan sólo poseen un
grado de libertad, este es, el desplazamiento horizontal en la coordenada x), son un instrumento muy
útil y el punto de partida para entender sistemas más complejos. Por otro lado con estos modelos es posible analizar, con cierta sencillez, la respuesta dinámica de aquellas estructuras en las que se pueda
suponer que su masa está concentrada en un punto, y la rigidez de sus elementos frente aldesplazamiento puede asimilarse a la rigidez K de dicho oscilador (la rigidez de la barra como se ha
supuesto), son ejemplos, los depósitos elevados (Figura A.34), las torres de control (Figura A.35), los
marcos y estructuras de un piso, etc.
Figura A.34. Tanques elevados.
Fernando Monroy, Facultad de Ingeniería UNAM 256
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 264/322
Apuntes de Estática Estructural
Figura A.35. Torres para control de tráfico aéreo.
Fernando Monroy, Facultad de Ingeniería UNAM 257
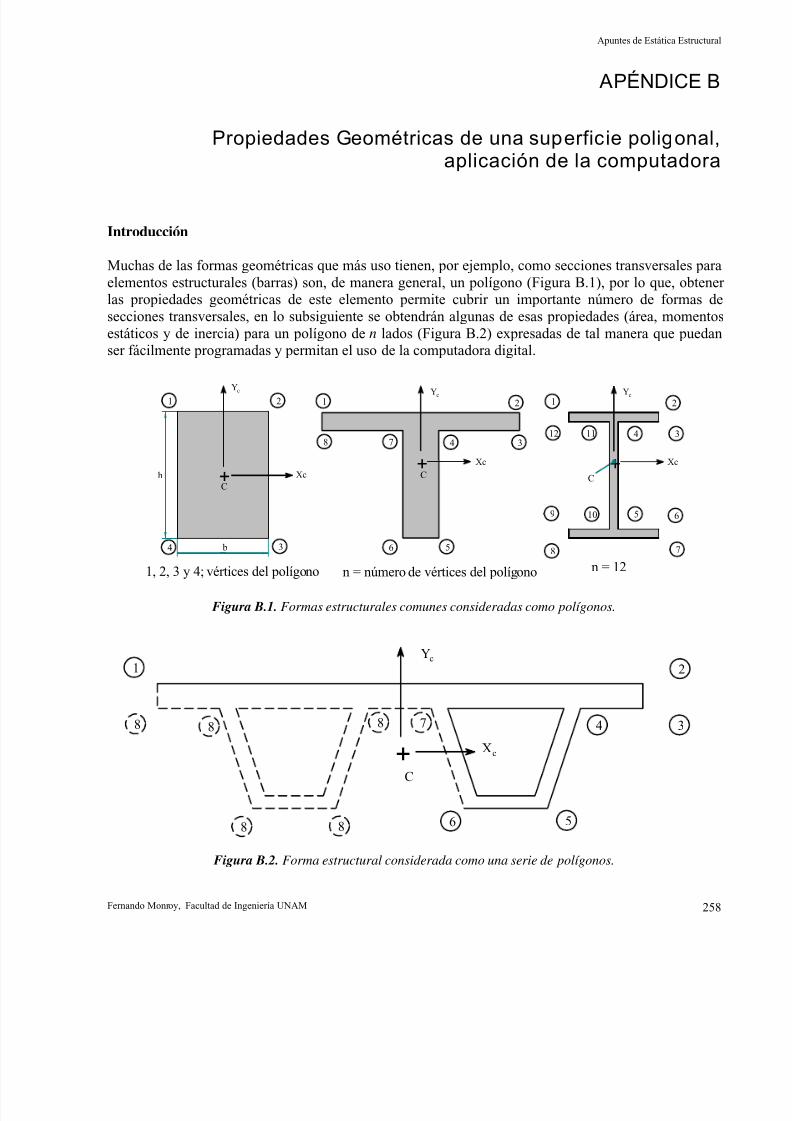
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 265/322
Apuntes de Estática Estructural
APÉNDICE B
Propiedades Geométricas de una superficie poligonal,aplicación de la computadora
Introducción
Muchas de las formas geométricas que más uso tienen, por ejemplo, como secciones transversales para
elementos estructurales (barras) son, de manera general, un polígono (Figura B.1), por lo que, obtenerlas propiedades geométricas de este elemento permite cubrir un importante número de formas de
secciones transversales, en lo subsiguiente se obtendrán algunas de esas propiedades (área, momentos
estáticos y de inercia) para un polígono de n lados (Figura B.2) expresadas de tal manera que puedanser fácilmente programadas y permitan el uso de la computadora digital.
1
Xc
1
1
b
h
n = 12
cY
+
1 2
3 4
4
+
cY
2
C
5
Xc
6
7
10
3 4
+
cY
2 1
5
Xc
6
7 8 3
9
11 12
8
C C
1, 2, 3 y 4; vértices del polígono n = número de vértices del polígono
Figura B.1. Formas estructurales comunes consideradas como polígonos.
4
+
cY 2 1
5 6
7 8 3
C
8 8
8 8
cX
Figura B.2. Forma estructural considerada como una serie de polígonos.
Fernando Monroy, Facultad de Ingeniería UNAM 258
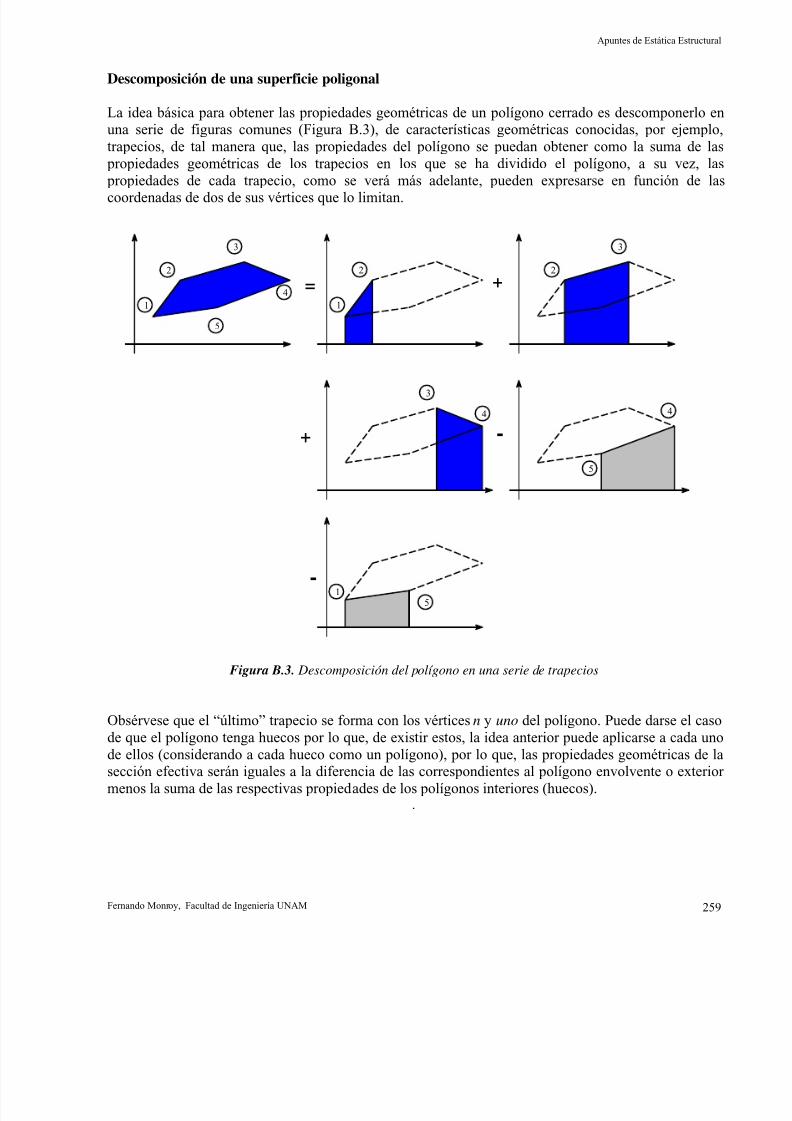
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 266/322
Apuntes de Estática Estructural
Descomposición de una superficie poligonal
La idea básica para obtener las propiedades geométricas de un polígono cerrado es descomponerlo enuna serie de figuras comunes (Figura B.3), de características geométricas conocidas, por ejemplo,
trapecios, de tal manera que, las propiedades del polígono se puedan obtener como la suma de las
propiedades geométricas de los trapecios en los que se ha dividido el polígono, a su vez, las
propiedades de cada trapecio, como se verá más adelante, pueden expresarse en función de lascoordenadas de dos de sus vértices que lo limitan.
= 2
1
-
+ 2
3
4
3
1 5
4
2
1
5
3
4
5
+
-
Figura B.3. Descomposición del polígono en una serie de trapecios
Obsérvese que el “último” trapecio se forma con los vértices n y uno del polígono. Puede darse el caso
de que el polígono tenga huecos por lo que, de existir estos, la idea anterior puede aplicarse a cada uno
de ellos (considerando a cada hueco como un polígono), por lo que, las propiedades geométricas de lasección efectiva serán iguales a la diferencia de las correspondientes al polígono envolvente o exterior
menos la suma de las respectivas propiedades de los polígonos interiores (huecos)..
Fernando Monroy, Facultad de Ingeniería UNAM 259

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 267/322
Apuntes de Estática Estructural
1
3 5
),( 1i1i y x1i +++
),( ii y xi
1
1
y i
x i+1
x i
1 xc
1 yc
y
x
1
1
3 5
c
x 1
1
a
b
x xc =
25d
y
y'
y yc = C C
1+i y
a) b)
Figura B.4. Trapecio, figura base para la obtención de propiedades geométricas de un polígono.
Para el trapecio de la figura B.4a, sus propiedades geométricas son:
cba
A2
+= (B.1)
ba
bac x xc +
+==
2
3 (B.2)
ba
baba y yc +
++==
22
3
1 (B.3)
El momento estático del trapecio con respecto a un eje horizontal que pasa por su base es:
⎥⎦
⎤⎢⎣
⎡−+−+= abaa Bc
acaQx (
3
1)(
2
1
2 (B.4)
Simplificando se obtiene:
)(6
1 22babacQxl ++= (B.5)
El momento estático con respecto a un eje vertical situado a una distancia d del lado a es:
⎟ ⎠
⎞⎜⎝
⎛ +−++= d cabcd
ccaQy
3
2)(
2
1)
2( (B.6)
Simplificando se llega a:
Fernando Monroy, Facultad de Ingeniería UNAM 260

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 268/322
Apuntes de Estática Estructural
[ )(3)2(6
1bad baccQy +++= ] (B.7)
El momento de inercia con respecto al eje x centroidal es:
23
23
)(3
1
)(2
1
)(36
1
212
1
⎥⎦
⎤
⎢⎣
⎡
⎥⎦
⎤
⎢⎣
⎡
+−−−+−+⎟ ⎠
⎞
⎜⎝
⎛
−+= aab yabccab
a
ycaac x I (B.8)
Después de sustituir (8.3) en la ecuación anterior y simplificando se obtiene:
( )[ ]ba
bbaabac y I
+
+++=
42242
36
1 (B.9)
El momento de inercia con respecto al eje y que pasa por su centroide es:
2
3
2
3
32)(
21)(
361
2121 ⎟
⎠ ⎞⎜
⎝ ⎛ −−+−+⎟
⎠ ⎞⎜
⎝ ⎛ −+= c xabccabc xcaca y I (B.10)
Sustituyendo la ecuación (B.2) en la ecuación anterior y simplificando se obtiene:
)(36
4223
ba
bbaac y I
+
++= (B.11)
Algunas de las ecuaciones anteriores (B.1 a B.11) pueden expresarse en función de las coordenadas de
dos vértices consecutivos del polígono, i e i+1(Figura B.4b), los cuales delimitan a uno de los trapecios
que pertenecen al polígono, así tenemos que:
(ii
ii x x y y
A −+
= ++
1
1
2) (B.12)
⎟⎟ ⎠
⎞⎜⎜⎝
⎛
+
+−+=
+
++
1
11 2
3 ii
iiiii
y y
y y x x x x (B.13)
1
2
11
2
3
1
+
++
+
++=
ii
iiii
y y
y y y y y (B.14)
( )[ 211
2
16
1+++ ++−= iiiiii y y y y x xQx ] (B.15)
( ) ( )( ) ( )[ 1111 326
1++++ +++−−= iiiiiiiii y y x y y x x x xQy ] (B.16)
Fernando Monroy, Facultad de Ingeniería UNAM 261
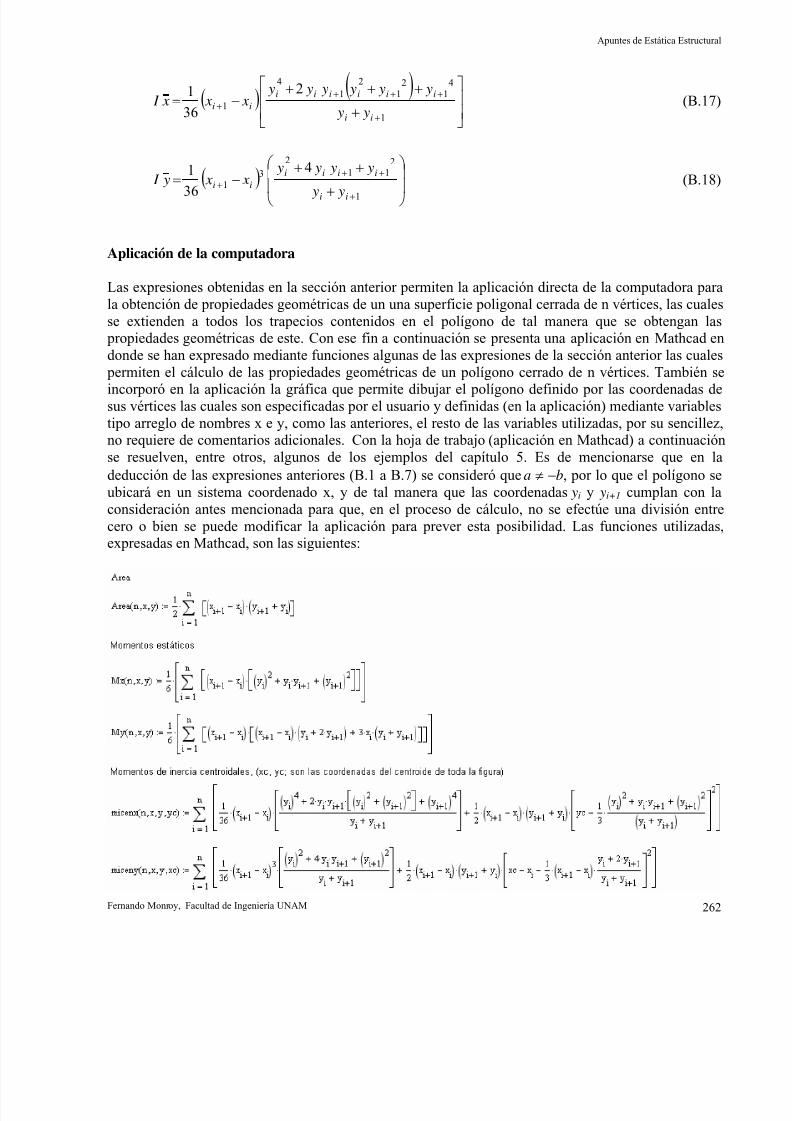
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 269/322
Apuntes de Estática Estructural
( ) ( )
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
+
+++−=
+
++++
1
41
21
2
1
4
1
2
36
1
ii
iiiiii
ii y y
y y y y y y x x x I (B.17)
( ) ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
++−=
+
++
+ 1
211
2
3
1
4
36
1
ii
iiii
ii y y
y y y y x x y I (B.18)
Aplicación de la computadora
Las expresiones obtenidas en la sección anterior permiten la aplicación directa de la computadora para
la obtención de propiedades geométricas de un una superficie poligonal cerrada de n vértices, las cuales
se extienden a todos los trapecios contenidos en el polígono de tal manera que se obtengan las propiedades geométricas de este. Con ese fin a continuación se presenta una aplicación en Mathcad en
donde se han expresado mediante funciones algunas de las expresiones de la sección anterior las cuales
permiten el cálculo de las propiedades geométricas de un polígono cerrado de n vértices. También seincorporó en la aplicación la gráfica que permite dibujar el polígono definido por las coordenadas de
sus vértices las cuales son especificadas por el usuario y definidas (en la aplicación) mediante variables
tipo arreglo de nombres x e y, como las anteriores, el resto de las variables utilizadas, por su sencillez,no requiere de comentarios adicionales. Con la hoja de trabajo (aplicación en Mathcad) a continuación
se resuelven, entre otros, algunos de los ejemplos del capítulo 5. Es de mencionarse que en la
deducción de las expresiones anteriores (B.1 a B.7) se consideró que a ≠ −b, por lo que el polígono se
ubicará en un sistema coordenado x, y de tal manera que las coordenadas yi y yi+1 cumplan con la
consideración antes mencionada para que, en el proceso de cálculo, no se efectúe una división entre
cero o bien se puede modificar la aplicación para prever esta posibilidad. Las funciones utilizadas,expresadas en Mathcad, son las siguientes:
Fernando Monroy, Facultad de Ingeniería UNAM 262

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 270/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 263
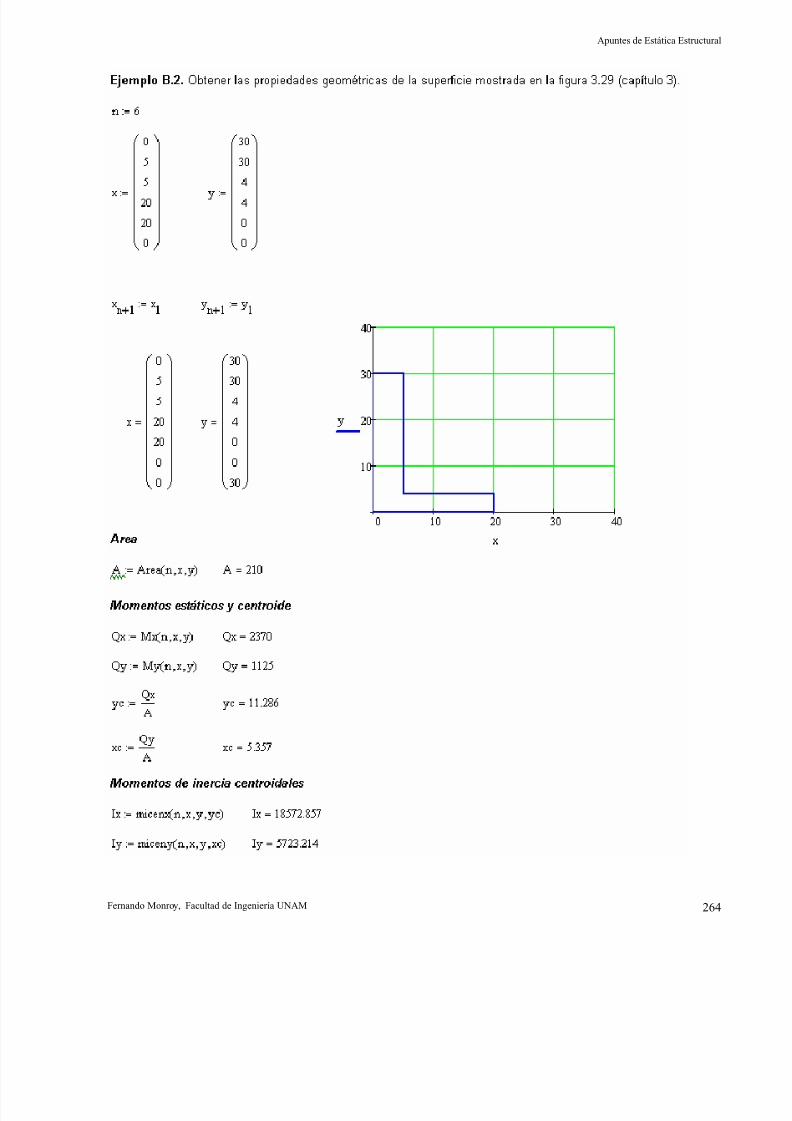
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 271/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 264
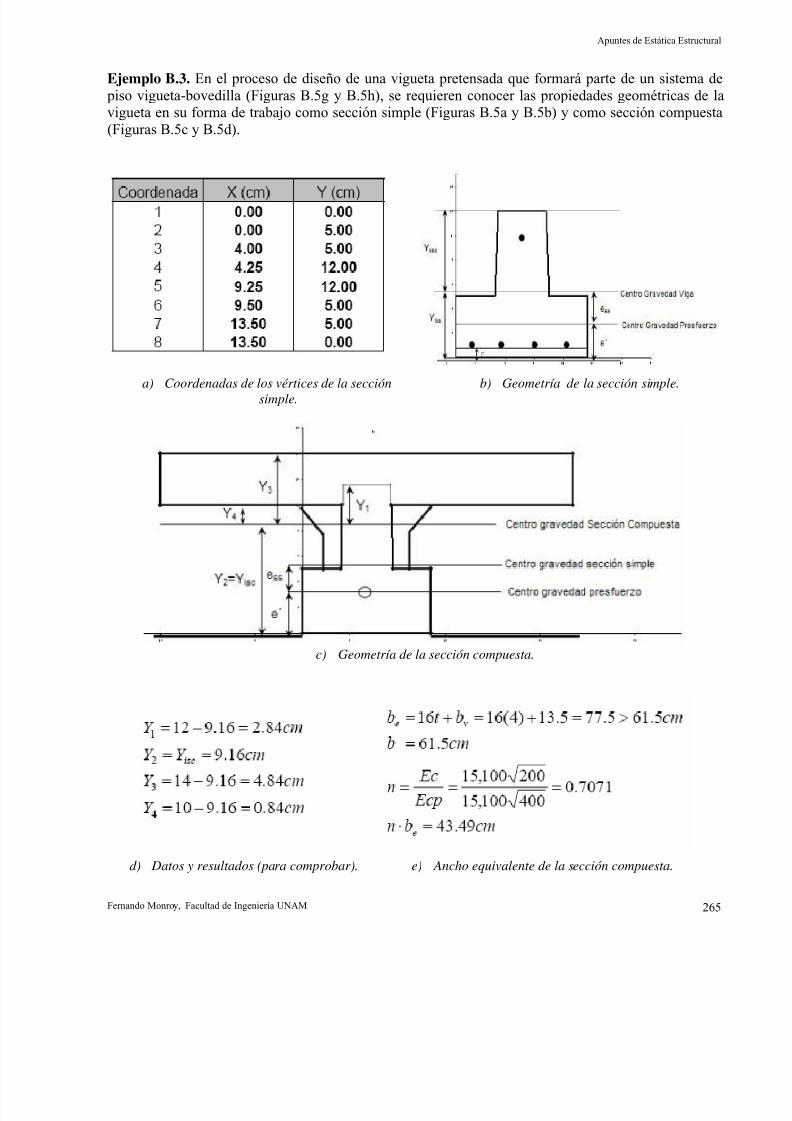
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 272/322
Apuntes de Estática Estructural
Ejemplo B.3. En el proceso de diseño de una vigueta pretensada que formará parte de un sistema de
piso vigueta-bovedilla (Figuras B.5g y B.5h), se requieren conocer las propiedades geométricas de lavigueta en su forma de trabajo como sección simple (Figuras B.5a y B.5b) y como sección compuesta
(Figuras B.5c y B.5d).
a)
Coordenadas de los vértices de la sección
simple.
b)
Geometría de la sección simple.
c) Geometría de la sección compuesta.
d) Datos y resultados (para comprobar).
e) Ancho equivalente de la sección compuesta.
Fernando Monroy, Facultad de Ingeniería UNAM 265

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 273/322
Apuntes de Estática Estructural
f) Geometría de la bovedilla.
g)
Vaciado del concreto en el sistema de pisovigueta-bovedilla.
h) Vista inferior de un sistema de piso (obra negra)vigueta-bovedilla
Figura B.5. Elementos, dimensiones y detalles de la sección transversal del ejemplo B.3.
Fernando Monroy, Facultad de Ingeniería UNAM 266
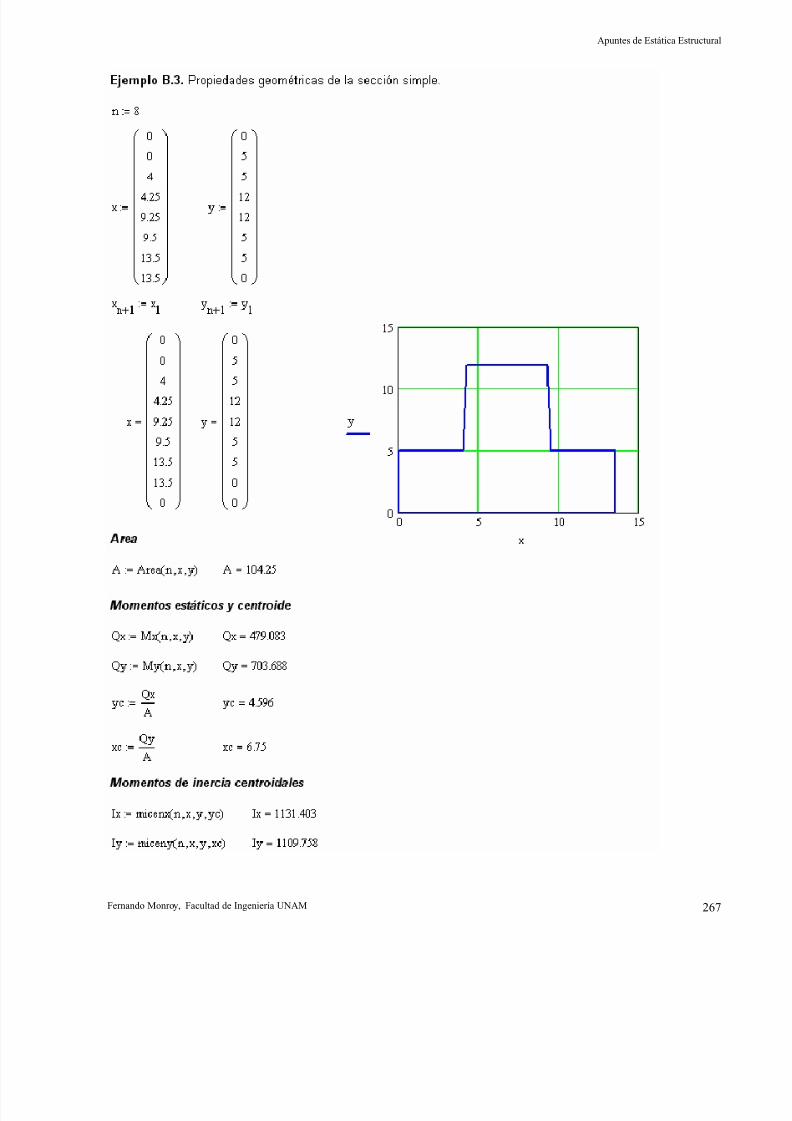
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 274/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 267
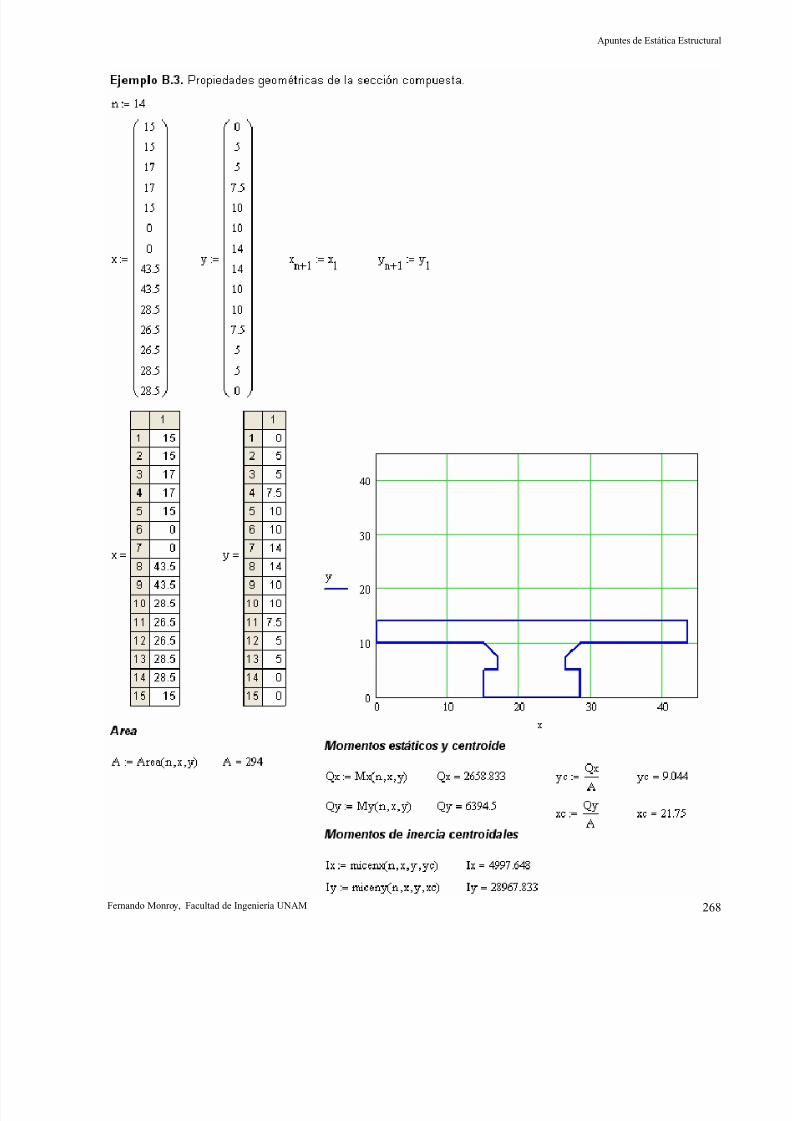
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 275/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 268
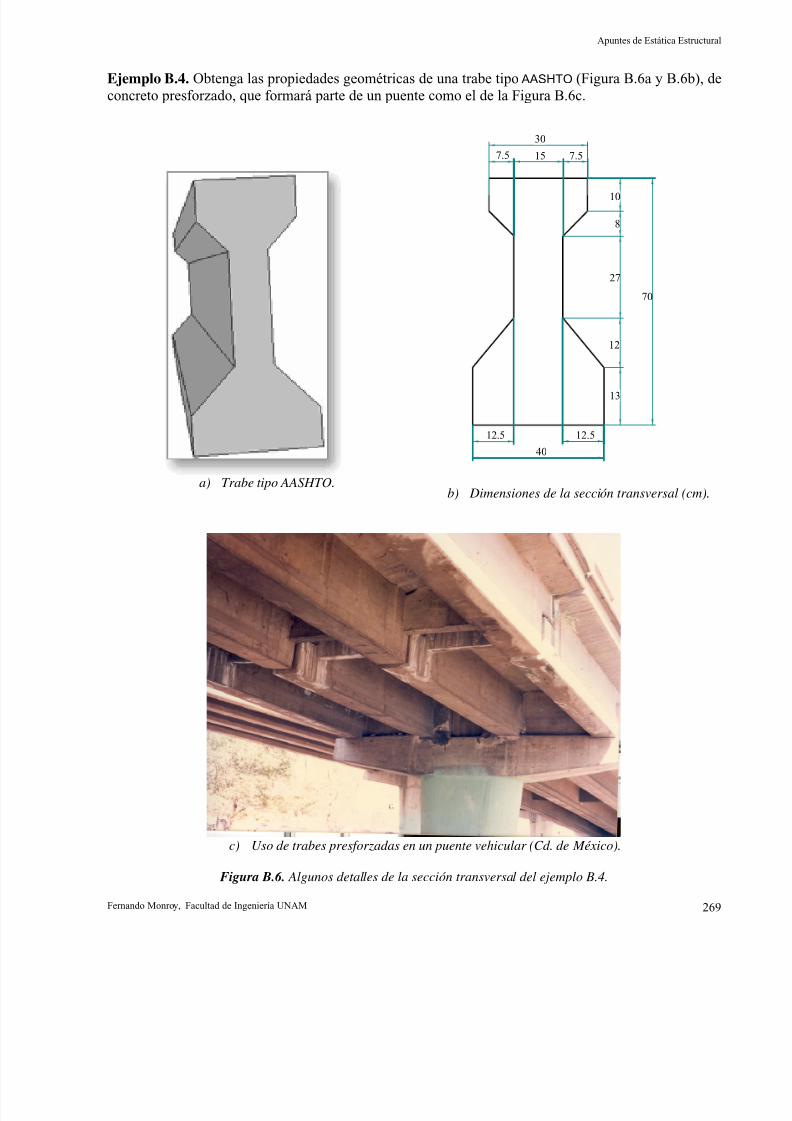
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 276/322
Apuntes de Estática Estructural
Ejemplo B.4. Obtenga las propiedades geométricas de una trabe tipo AASHTO (Figura B.6a y B.6b), de
concreto presforzado, que formará parte de un puente como el de la Figura B.6c.
a) Trabe tipo AASHTO.
60
15
2 0
1 5
5 0
3 0
3 5
1 5 0
25
80
7.5
30
12.5
10
8
27
70
12
13
40
30 157.515
2512.5
b) Dimensiones de la sección transversal (cm).
c) Uso de trabes presforzadas en un puente vehicular (Cd. de México).
Figura B.6. Algunos detalles de la sección transversal del ejemplo B.4.
Fernando Monroy, Facultad de Ingeniería UNAM 269
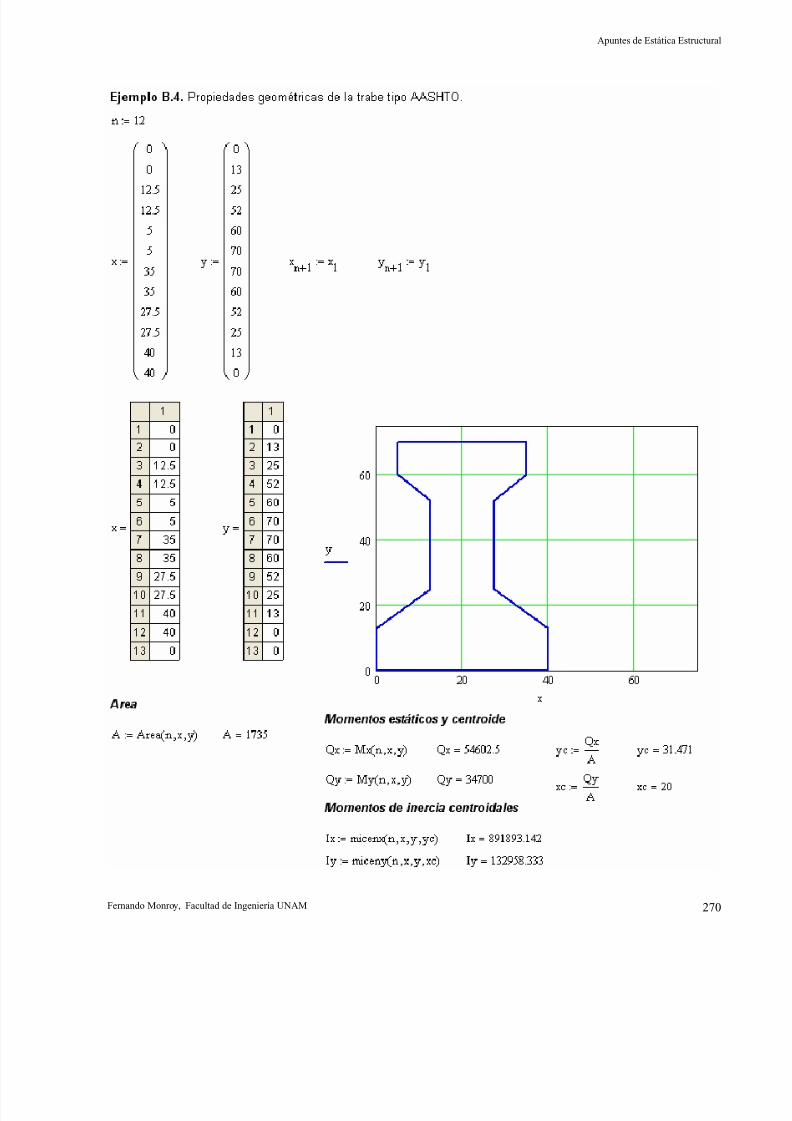
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 277/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 270
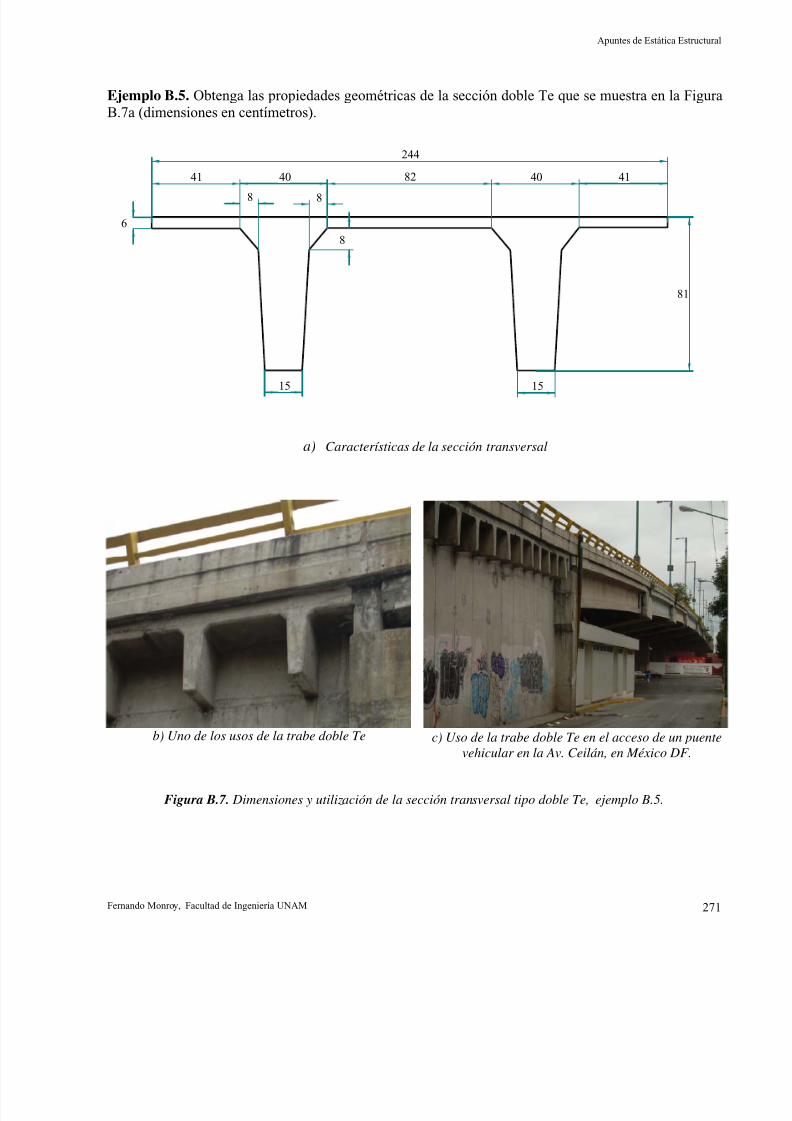
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 278/322
Apuntes de Estática Estructural
Ejemplo B.5. Obtenga las propiedades geométricas de la sección doble Te que se muestra en la FiguraB.7a (dimensiones en centímetros).
235
40
8
40
8
75 40 4041
8
40
8
82
244
40 41
17 17
7 0
15 15
81
56
1 08
a) Características de la sección transversal
b) Uno de los usos de la trabe doble Te c) Uso de la trabe doble Te en el acceso de un puente
vehicular en la Av. Ceilán, en México DF.
Figura B.7. Dimensiones y utilización de la sección transversal tipo doble Te, ejemplo B.5.
Fernando Monroy, Facultad de Ingeniería UNAM 271
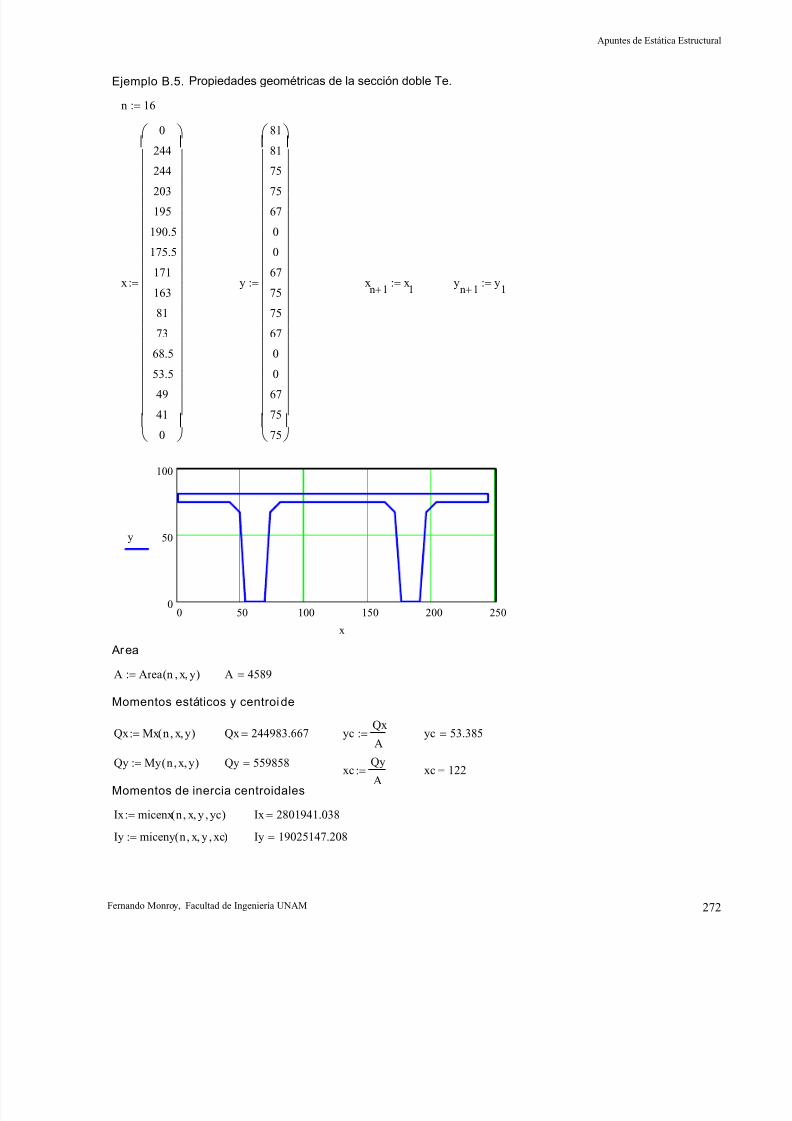
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 279/322
Apuntes de Estática Estructural
Iy 19025147.208=Iy miceny n x, y, xc,( ):=
Ix 2801941.038=Ix micenx n x, y, yc,( ):=
Momentos de inercia centroidales
xc 122=xcQy
A:=
Qy 559858=Qy My n x, y,( ):=
yc 53.385=ycQx
A:=Qx 244983.667=Qx Mx n x, y,( ):=
Momentos estáticos y centroide
A 4589=A Area n x, y,( ):=
Area
0 50 100 150 200 2500
50
100
y
x
yn 1+
y1
:=xn 1+
x1
:=y
81
81
75
75
67
0
0
67
75
75
67
0
067
75
75
⎛
⎜⎜
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎞
⎟⎟
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
:=x
0
244
244
203
195
190.5
175.5
171
163
81
73
68.5
53.549
41
0
⎛
⎜⎜
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎞
⎟⎟
⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
:=
n 16:=
Ejemplo B.5. Propiedades geométricas de la sección doble Te.
Fernando Monroy, Facultad de Ingeniería UNAM 272
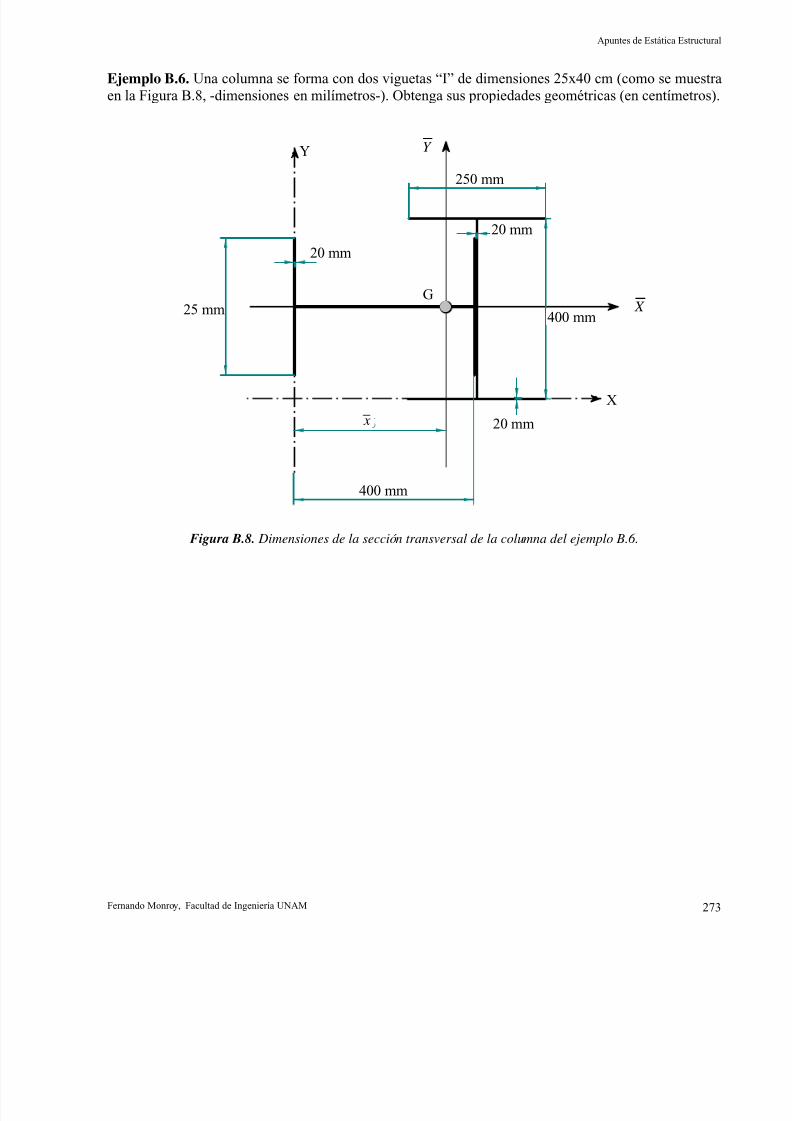
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 280/322
Apuntes de Estática Estructural
Ejemplo B.6. Una columna se forma con dos viguetas “I” de dimensiones 25x40 cm (como se muestra
en la Figura B.8, -dimensiones en milímetros-). Obtenga sus propiedades geométricas (en centímetros).
Y
X
50
6 5
250 mm
020 mm
G
400 mm 5 0
25 mm
65400 mm
55 x
X
1
20 mm
120 mm
Y
Figura B.8. Dimensiones de la sección transversal de la columna del ejemplo B.6.
Fernando Monroy, Facultad de Ingeniería UNAM 273
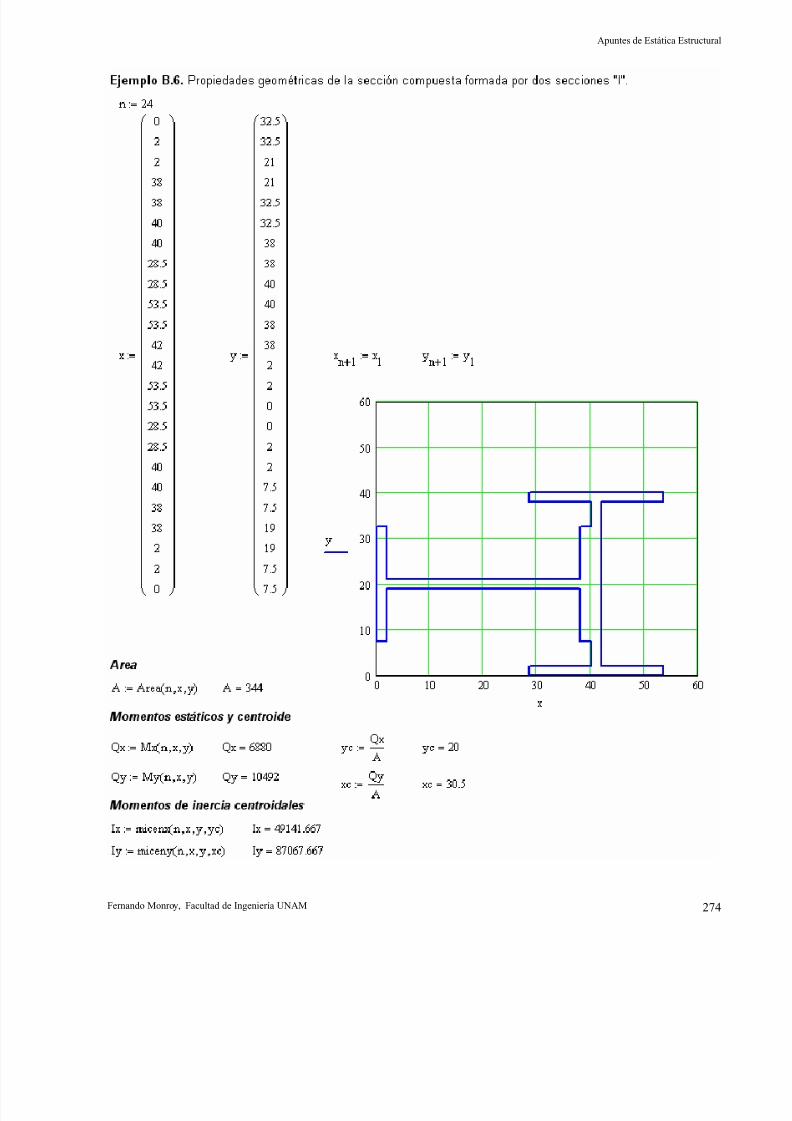
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 281/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 274
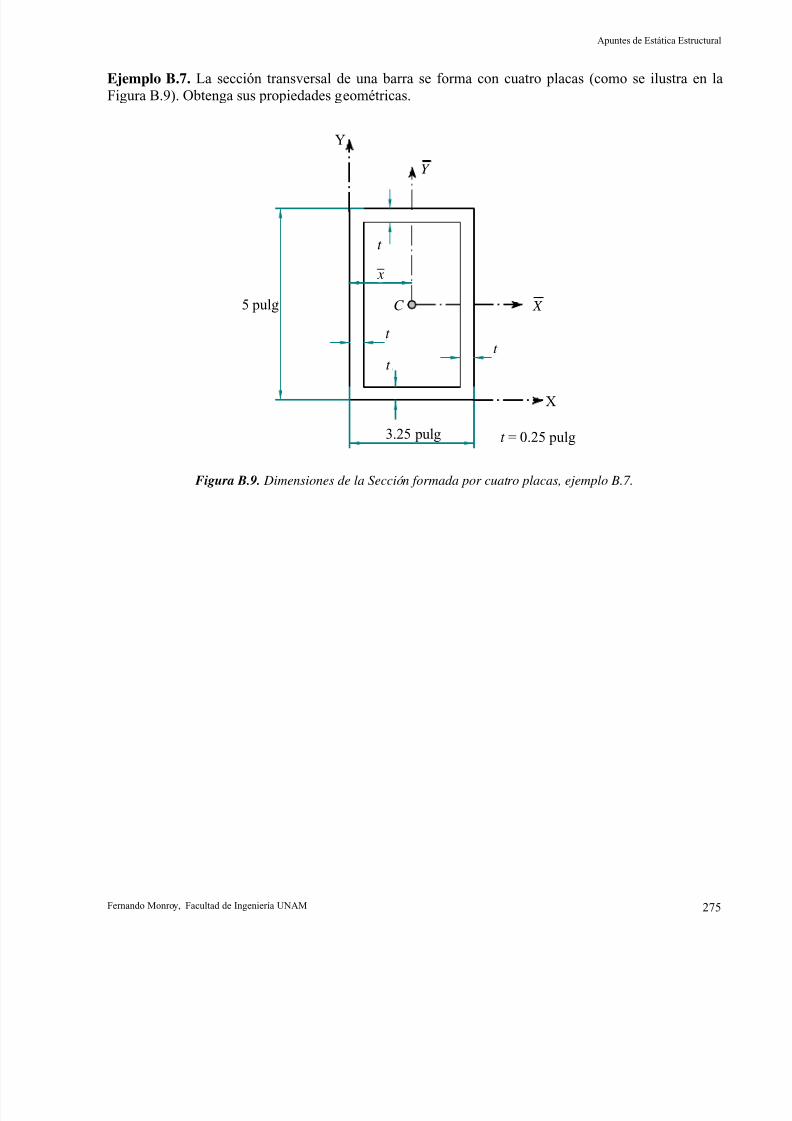
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 282/322
Apuntes de Estática Estructural
Ejemplo B.7. La sección transversal de una barra se forma con cuatro placas (como se ilustra en la
Figura B.9). Obtenga sus propiedades geométricas.
7 0
45
5
5
C
5
t = 0.25 pulg
5 pulg
t t
t
3.25 pulg
X
Y
X
Y
23 x
5t
Figura B.9. Dimensiones de la Sección formada por cuatro placas, ejemplo B.7.
Fernando Monroy, Facultad de Ingeniería UNAM 275
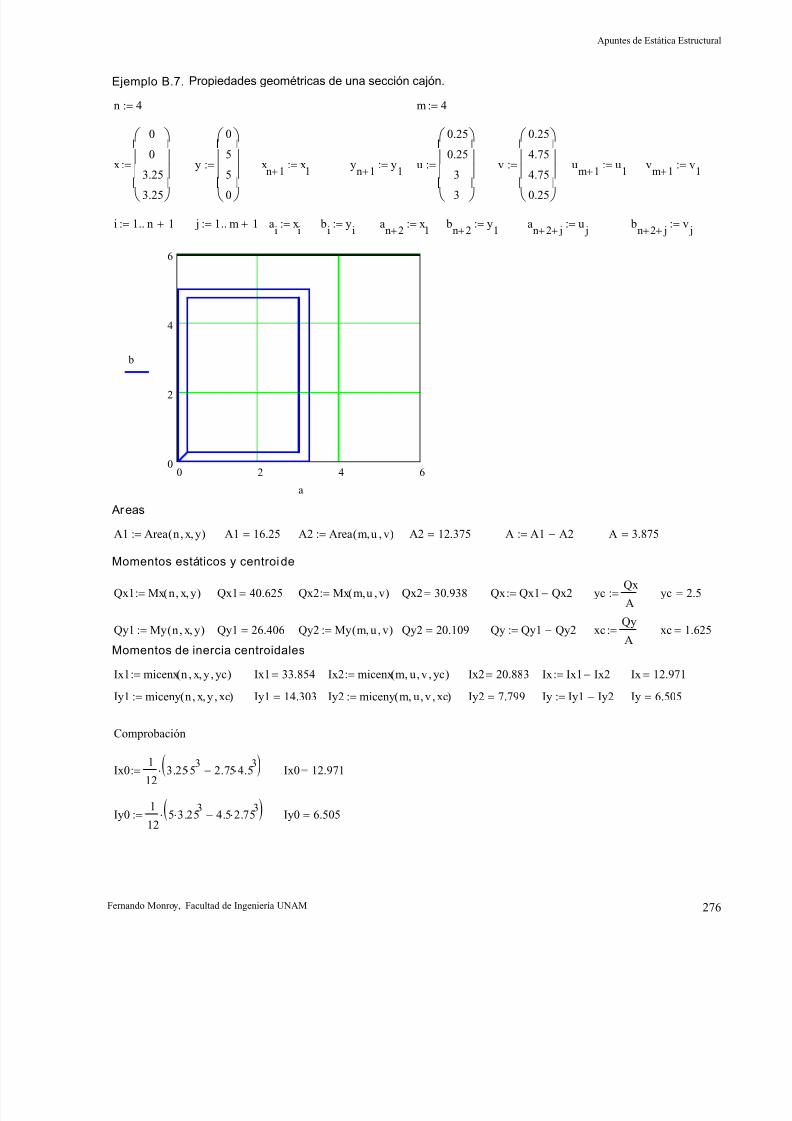
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 283/322
Apuntes de Estática Estructural
Qx2 Mx m u, v,( ):= Qx2 30.938= Qx Qx1 Qx2−:= ycQx
A:= yc 2.5=
Qy1 My n x, y,( ):= Qy1 26.406= Qy2 My m u, v,( ):= Qy2 20.109= Qy Qy1 Qy2−:= xcQy
A:= xc 1.625=
Momentos de inercia centroidales
Ix1 micenx n x, y, yc,( ):= Ix1 33.854= Ix2 micenx m u, v, yc,( ):= Ix2 20.883= Ix Ix1 Ix2−:= Ix 12.971=
Iy1 miceny n x, y, xc,( ):= Iy1 14.303= Iy2 miceny m u, v, xc,( ):= Iy2 7.799= Iy Iy1 Iy2−:= Iy 6.505=
Comprobación
Ix01
123.255
3⋅ 2.75 4.5
3⋅−( )⋅:= Ix0 12.971=
Iy01
125 3.25
3⋅ 4.5 2.75
3⋅−( )⋅:= Iy0 6.505=
Ejemplo B.7. Propiedades geométricas de una sección cajón.
n 4:= m 4:=
x
0
0
3.25
3.25
⎛
⎜⎜
⎝
⎞
⎟⎟
⎠
:= y
0
5
5
0
⎛
⎜⎜
⎝
⎞
⎟⎟
⎠
:= xn 1+
x1
:= yn 1+
y1
:= u
0.25
0.25
3
3
⎛
⎜⎜
⎝
⎞
⎟⎟
⎠
:= v
0.25
4.75
4.75
0.25
⎛
⎜⎜
⎝
⎞
⎟⎟
⎠
:= um 1+
u1
:= vm 1+
v1
:=
i 1 n 1+..:= j 1 m 1+..:= ai
xi
:= bi
yi
:= an 2+
x1
:= bn 2+
y1
:= an 2+ j+
u j
:= bn 2+ j+
v j
:=
0 2 4 60
2
4
6
b
a
Areas
A1 Area n x, y,( ):= A1 16.25= A2 Area m u, v,( ):= A2 12.375= A A1 A2−:= A 3.875=
Momentos estáticos y centroide
Qx1 Mx n x, y,( ):= Qx1 40.625=
Fernando Monroy, Facultad de Ingeniería UNAM 276
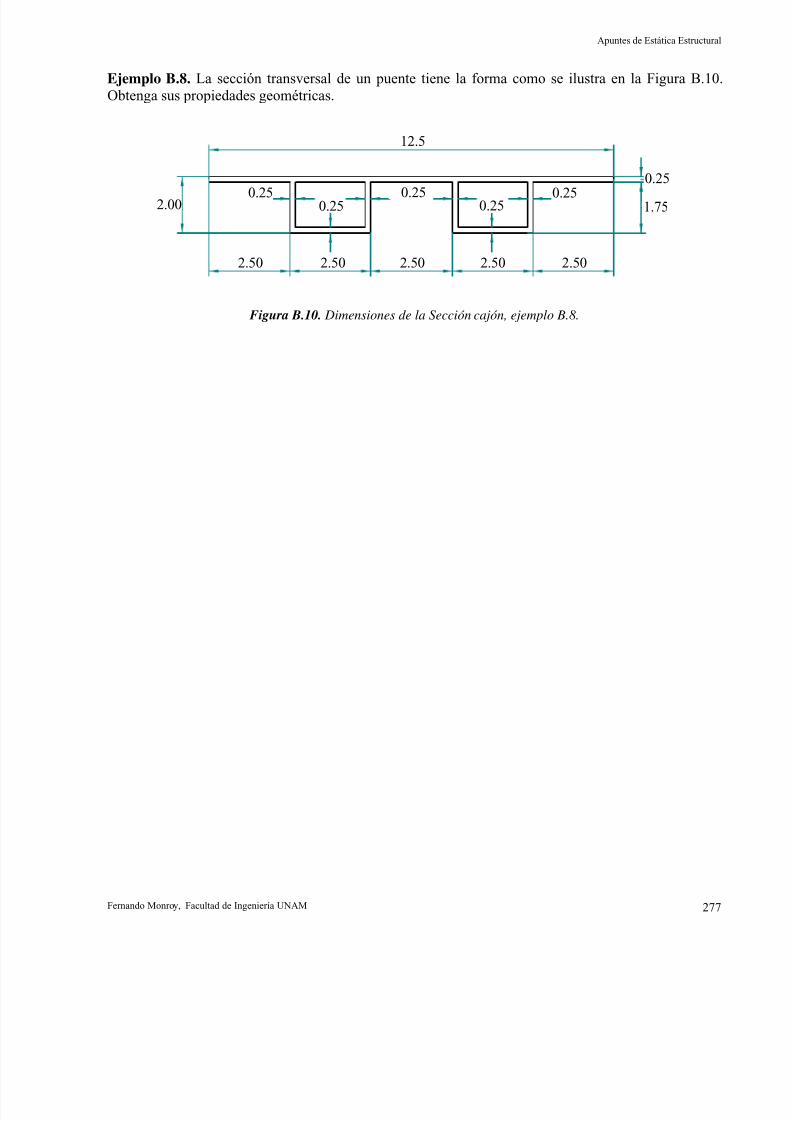
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 284/322
Apuntes de Estática Estructural
Ejemplo B.8. La sección transversal de un puente tiene la forma como se ilustra en la Figura B.10.
Obtenga sus propiedades geométricas.
150
2 1
30 30 30 30 30
1 9
2
2
2
22
2
2
2.50 2.50 2.50 2.50 2.50
1.75
0.25
12.5
0.250.25
0.250.25
0.252.00
Figura B.10. Dimensiones de la Sección cajón, ejemplo B.8.
Fernando Monroy, Facultad de Ingeniería UNAM 277
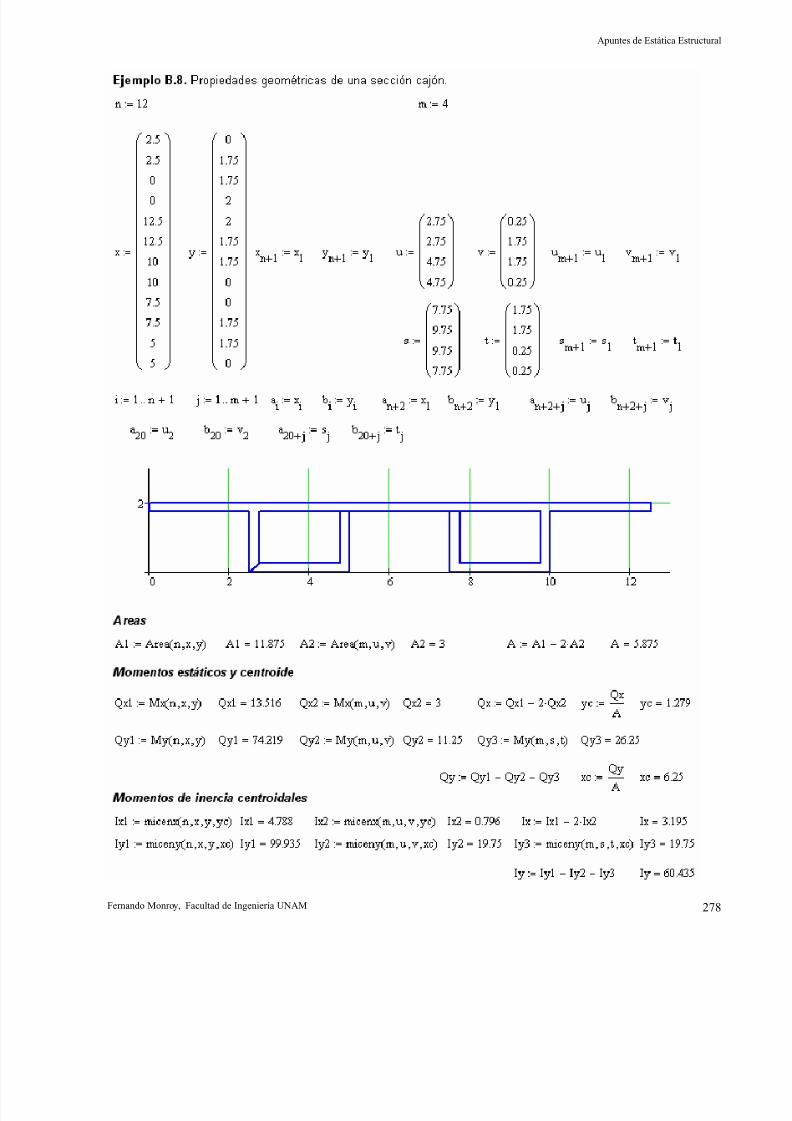
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 285/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 278
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 286/322
Apuntes de Estática Estructural
Ejemplo B.9. En el puente Peñuelas (Figuras B.11a a B11c) construido en la Cd. De Querétaro, el cual
obtuvo por el año de 1993 distinción nacional e internacional, se utilizaron una serie de vigas
presforzadas de sección transversal similar a la mostrada en la figura B.12, obtenga las propiedadesgeométricas de la sección transversal de la trabe.
a) Vista general
b) Columnas, trabes portantes y vigas longitudinales de sección cajón.
Figura B.11. Puente Peñuelas en la Cd. de Querétaro, México.
Fernando Monroy, Facultad de Ingeniería UNAM 279

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 287/322
Apuntes de Estática Estructural
Einf.
1 6
6
6
96
1 2 7
53
2 1
2122
116
61 64c b b c
67 h
e
i
15 j 15
15
81
1 3 f
10
145 a
2 0 2
135
d g
Dimensiones Básicas en cms.
a = 106.00 b = 9.00 c = 63.00 d = 6.40 e = 5.60 f = 7.00 g = 10.00 h = 10.00 i = 78.00 j = 40.00Einf.= 25.00
Figura B.12. Dimensiones de una sección transversal tipo “cajón” similar a la utilizada en el Puente Peñuelas.
Fernando Monroy, Facultad de Ingeniería UNAM 280
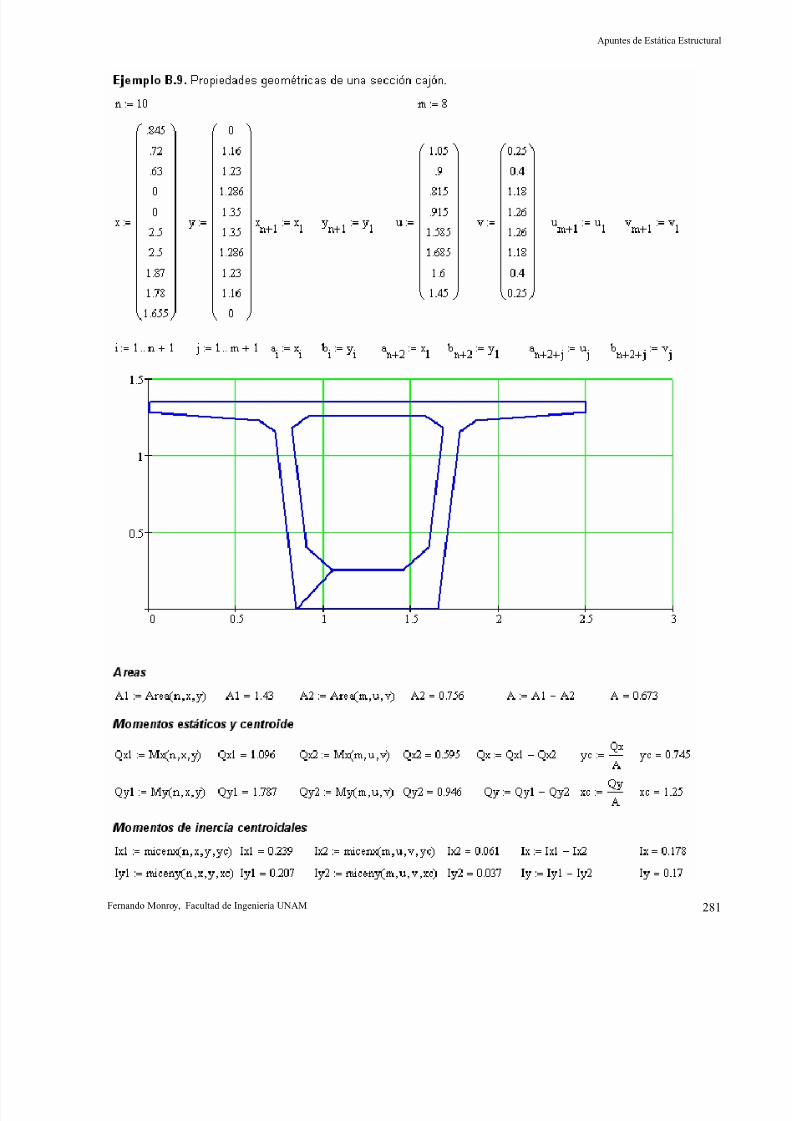
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 288/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM 281

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 289/322
Apuntes de Estática Estructural
APÉNDICE C
Aplicación de las funciones de singularidada la obtención de elementos mecánicos.
Repasando el trabajo hecho en el capítulo 5, observamos que la aplicación del equilibrio ofrece un
medio conveniente y efectivo para determinar en cualquier sección de una viga prismática loselementos mecánicos, por ejemplo, mediante las funciones analíticas respectivas, es decir, N(x), V(x) y
M(x). Sin embargo, cuando las cargas en la viga son tales que dos o más funciones diferentes son
necesarias para representar a cada uno de los elementos mecánicos en toda la longitud de la viga, loscálculos pueden resultar bastante laboriosos. Veremos en esta sección que el uso de funciones
singulares puede simplificar esos cálculos.
Empecemos considerando la viga que se muestra en la Figura C1.
30
x
yP
A
D
B
L/4 903L/4
Figura C.1. Viga simplemente apoyada con carga concentrada.
Las ecuaciones que definen el momento flexionante en las porciones AD y DB de la viga pueden
expresarse por las funciones:
40
4
3)(1
L x x
P x M ≤≤= (C.1)
L x L L
xP xP
x M ≤≤⎟ ⎠
⎞⎜⎝
⎛ −−=
444
3)(2 (C.2)
En donde x es la distancia medida desde el extremo A. Las funciones M 1( x) y M 2( x) puedenrepresentarse por la expresión única:
⟩−⟨−=⟩⟨44
3 L xP x
P x M (C.3)
siempre y cuando especifiquemos que el segundo término debe ser incluido en nuestros cálculoscuando x > L/4 e ignorando cuando x < L/4.
Fernando Monroy, Facultad de Ingeniería UNAM 282
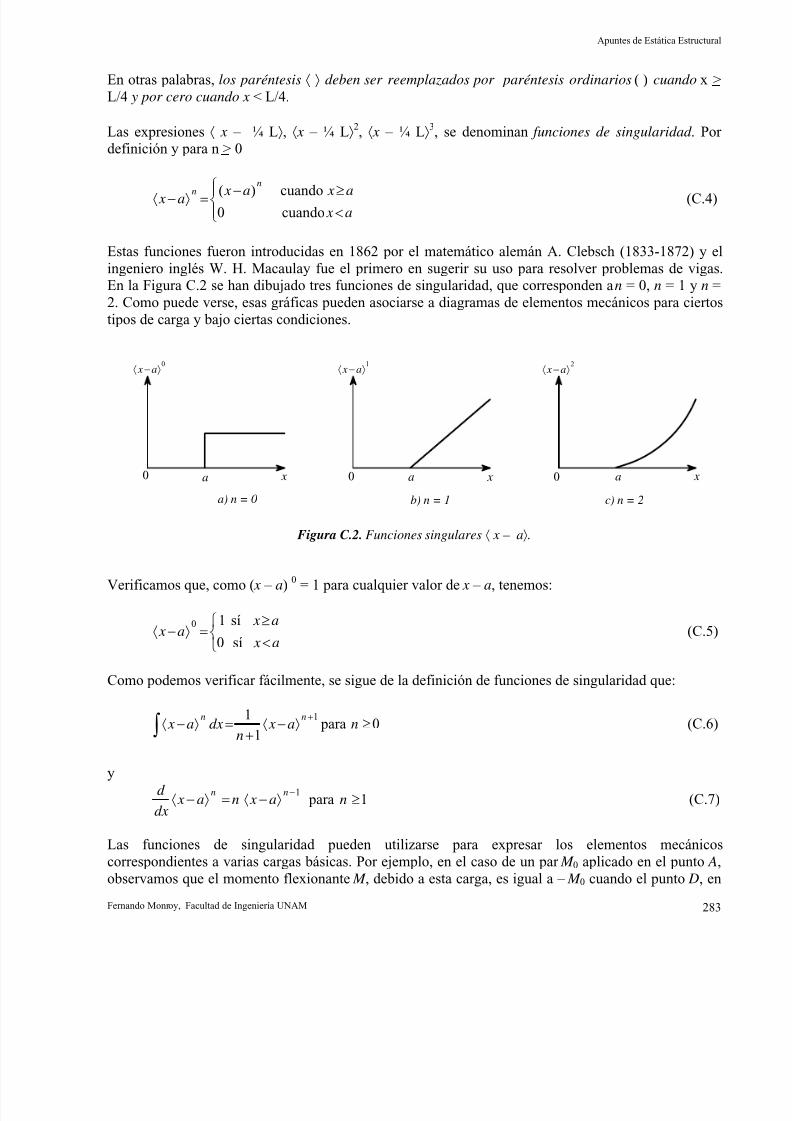
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 290/322
Apuntes de Estática Estructural
En otras palabras, los paréntesis ⟨ ⟩ deben ser reemplazados por paréntesis ordinarios ( ) cuando x >
L/4 y por cero cuando x < L/4.
Las expresiones ⟨ x – ¼ L⟩, ⟨ x – ¼ L⟩2, ⟨ x – ¼ L⟩3
, se denominan funciones de singularidad . Pordefinición y para n > 0
(C.4)⎪⎩⎪⎨⎧
<≥−=⟩−⟨
a x
a xa xa xnn
cuando0
cuando)(
Estas funciones fueron introducidas en 1862 por el matemático alemán A. Clebsch (1833-1872) y el
ingeniero inglés W. H. Macaulay fue el primero en sugerir su uso para resolver problemas de vigas.En la Figura C.2 se han dibujado tres funciones de singularidad, que corresponden a n = 0, n = 1 y n =
2. Como puede verse, esas gráficas pueden asociarse a diagramas de elementos mecánicos para ciertos
tipos de carga y bajo ciertas condiciones.
0 a x 0 a x 0 a x
0⟩−⟨ a x
2⟩−⟨ a x
1⟩−⟨ a x
a) n = 0 b) n = 1 c) n = 2
Figura C.2. Funciones singulares ⟨ x – a⟩.
Verificamos que, como ( x – a)0 = 1 para cualquier valor de x – a, tenemos:
(C.5)⎩⎨⎧
<
≥=⟩−⟨
a x
a xa x
sí0
sí10
Como podemos verificar fácilmente, se sigue de la definición de funciones de singularidad que:
∫ ≥⟩−⟨+
=⟩−⟨ +
0 para1
1 1na x
ndxa x
nn (C.6)
y
1 para1
≥⟩−⟨=⟩−⟨ −
na xna xdx
d nn (C.7)
Las funciones de singularidad pueden utilizarse para expresar los elementos mecánicos
correspondientes a varias cargas básicas. Por ejemplo, en el caso de un par M 0 aplicado en el punto A,
observamos que el momento flexionante M , debido a esta carga, es igual a – M 0 cuando el punto D, en
Fernando Monroy, Facultad de Ingeniería UNAM 283
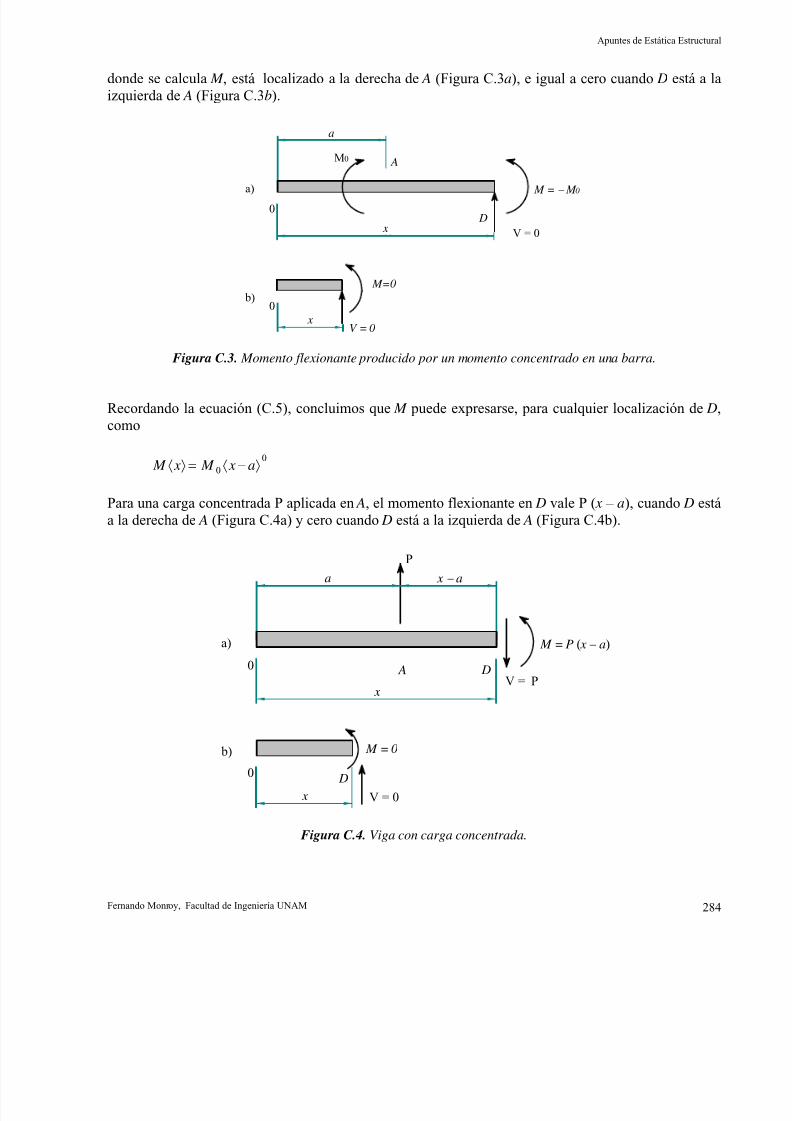
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 291/322
Apuntes de Estática Estructural
donde se calcula M , está localizado a la derecha de A (Figura C.3a), e igual a cero cuando D está a la
izquierda de A (Figura C.3b).
100 x
50
0 D
M = − M 0
AM0
a
30 x
0
V = 0
M=0
a)
b)
V = 0
Figura C.3. Momento flexionante producido por un momento concentrado en una barra.
Recordando la ecuación (C.5), concluimos que M puede expresarse, para cualquier localización de D,
como
0
0 ⟩−⟨=⟩⟨ a x M x M
Para una carga concentrada P aplicada en A, el momento flexionante en D vale P ( x – a), cuando D está
a la derecha de A (Figura C.4a) y cero cuando D está a la izquierda de A (Figura C.4b).
100 x
0 D
M = P ( x − a)
A
P
40
0 D
M = 0
V = P
60 40a x − a
x
a)
b)
V = 0
Figura C.4. Viga con carga concentrada.
Fernando Monroy, Facultad de Ingeniería UNAM 284
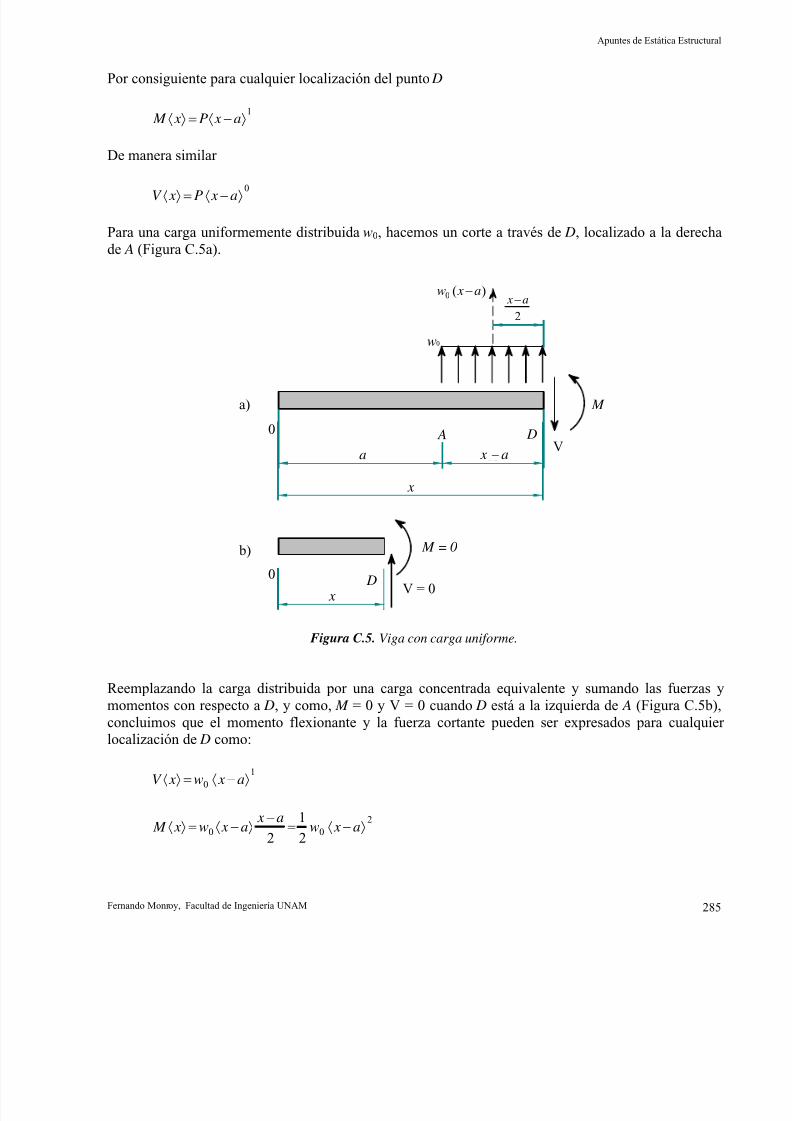
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 292/322
Apuntes de Estática Estructural
Por consiguiente para cualquier localización del punto D
1⟩−⟨=⟩⟨ a xP x M
De manera similar
0⟩−⟨=⟩⟨ a xP xV
Para una carga uniformemente distribuida w0, hacemos un corte a través de D, localizado a la derecha
de A (Figura C.5a).
100 x
0 D
M
A
40
0 D
M = 0
V
x
)(0 a xw −
w0
3862 a x − a
a)
b)
V = 0
02
a x−
Figura C.5. Viga con carga uniforme.
Reemplazando la carga distribuida por una carga concentrada equivalente y sumando las fuerzas y
momentos con respecto a D, y como, M = 0 y V = 0 cuando D está a la izquierda de A (Figura C.5b),
concluimos que el momento flexionante y la fuerza cortante pueden ser expresados para cualquierlocalización de D como:
1
0 ⟩−⟨=⟩⟨ a xw xV
2
002
1
2⟩−⟨=
−⟩−⟨=⟩⟨ a xw
a xa xw x M
Fernando Monroy, Facultad de Ingeniería UNAM 285
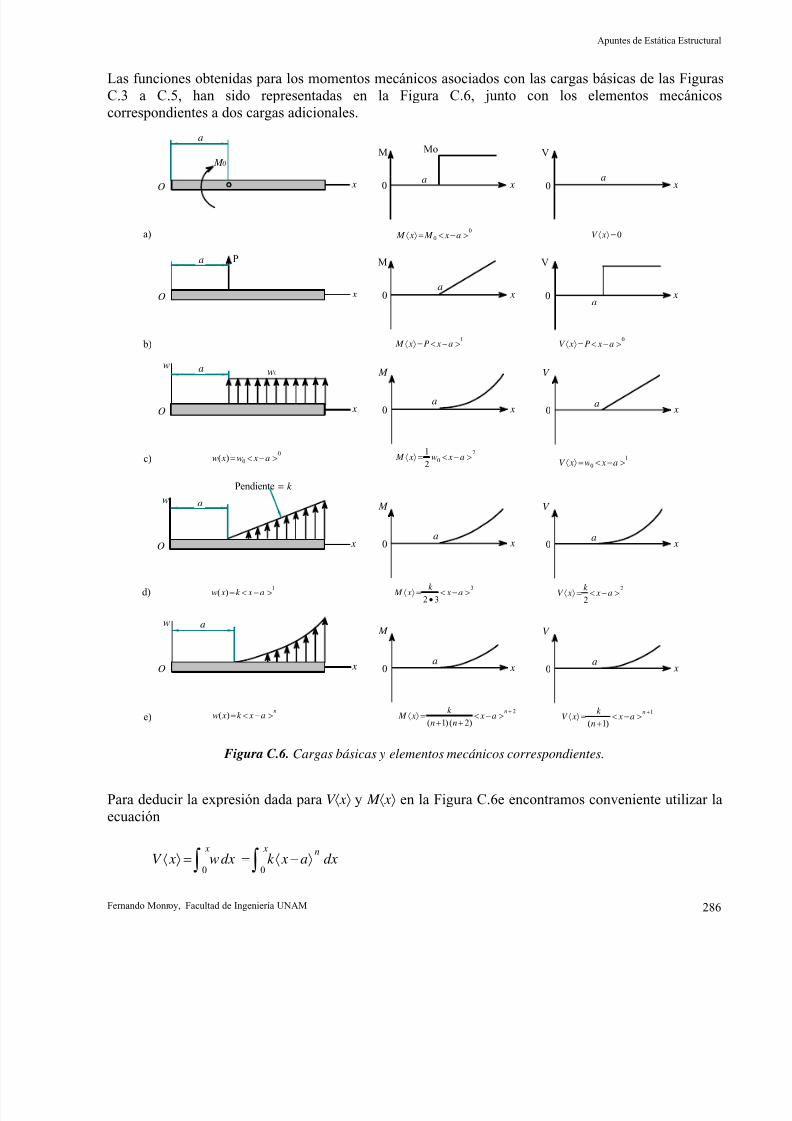
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 293/322
Apuntes de Estática Estructural
Las funciones obtenidas para los momentos mecánicos asociados con las cargas básicas de las Figuras
C.3 a C.5, han sido representadas en la Figura C.6, junto con los elementos mecánicos
correspondientes a dos cargas adicionales.
O 0a
x
1>−<=⟩⟨ a xP x M
x
M
O
M 0
0
a
x
0
0 >−<=⟩⟨ a x M x M
x
30a Mo
30a P
a)
b)
O
M
0a
x
3
32>−<
•=⟩⟨ a x
k x M
x
Pendiente = k
w
O
M
0a
x
2
02
1>−<=⟩⟨ a xw x M
x
w030aw
30a
0
0)( >−<= a xw xw
1)( >−<= a xk xw
c)
d)
O
M
0a
x
2
)2()1(
+>−<
++=⟩⟨
na x
nn
k x M
x
w 32a
na xk xw >−<=)(e)
0a
x
0>−<=⟩⟨ a xP xV
V
0
a
x
0=⟩⟨ xV
V
0a
x
2
2>−<=⟩⟨ a x
k xV
V
0a
x
1
0 >−<=⟩⟨ a xw xV
V
0a
x
1
)1(
+>−<
+=⟩⟨
na x
n
k xV
M V
Figura C.6. Cargas básicas y elementos mecánicos correspondientes.
Para deducir la expresión dada para V ⟨ x⟩ y M ⟨ x⟩ en la Figura C.6e encontramos conveniente utilizar la
ecuación
∫∫ ⟩−⟨==⟩⟨ x n x
dxa xk dxw xV 00
Fernando Monroy, Facultad de Ingeniería UNAM 286

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 294/322
Apuntes de Estática Estructural
O, recordando la ecuación C.6
1
1
+⟩−⟨
+=⟩⟨
na x
n
k xV
Usando la relación entre M y V, escribimos:
2
0
1
0
)2()1(
1
+
+
⟩−⟨++
=⟩⟨
⟩−⟨+
=⟩⟨=⟩⟨ ∫∫n
x n x
a xnn
k x M
dxa xn
k dx xV x M
(C.8)
La expresión para el momento flexionante correspondiente a la carga de la Figura C.6d puede obtenerse
haciendo n = 1 en la ecuación (C.8). Podemos también verificar la expresión obtenida para M ⟨ x⟩ y V ⟨ x⟩ en el caso de la Figura C.6c, haciendo n = 0 en la ecuación (C.8).
Para la mayoría de las cargas que se presentan en la práctica de la ingeniería, el momento flexionante yla fuerza cortante pueden obtenerse combinando algunas de las expresiones dadas para M ⟨ x⟩ y V⟨ x⟩ enla Figura C.6. Los momentos y fuerzas cortantes originados por las reacciones en los apoyos también
deben ser incluidos. Como todas las cargas distribuidas mostradas en la Figura C.6 son de extremoabierto a la derecha, una carga distribuida que no se extienda hasta el extremo derecho de la viga
(Figura C.7), o que es discontinua, debe ser reemplazada por una combinación equivalente de cargas
básicas de extremo abierto.
00>−<+>−<−=⟩⟨ b xwa xw xw
O x
w0
w
15a
60b
90L
= O x
w0w
15a
− w0
60
91
b
L
Figura C.7. Viga con carga uniforme que no llega hasta su extremo derecho.
Fernando Monroy, Facultad de Ingeniería UNAM 287
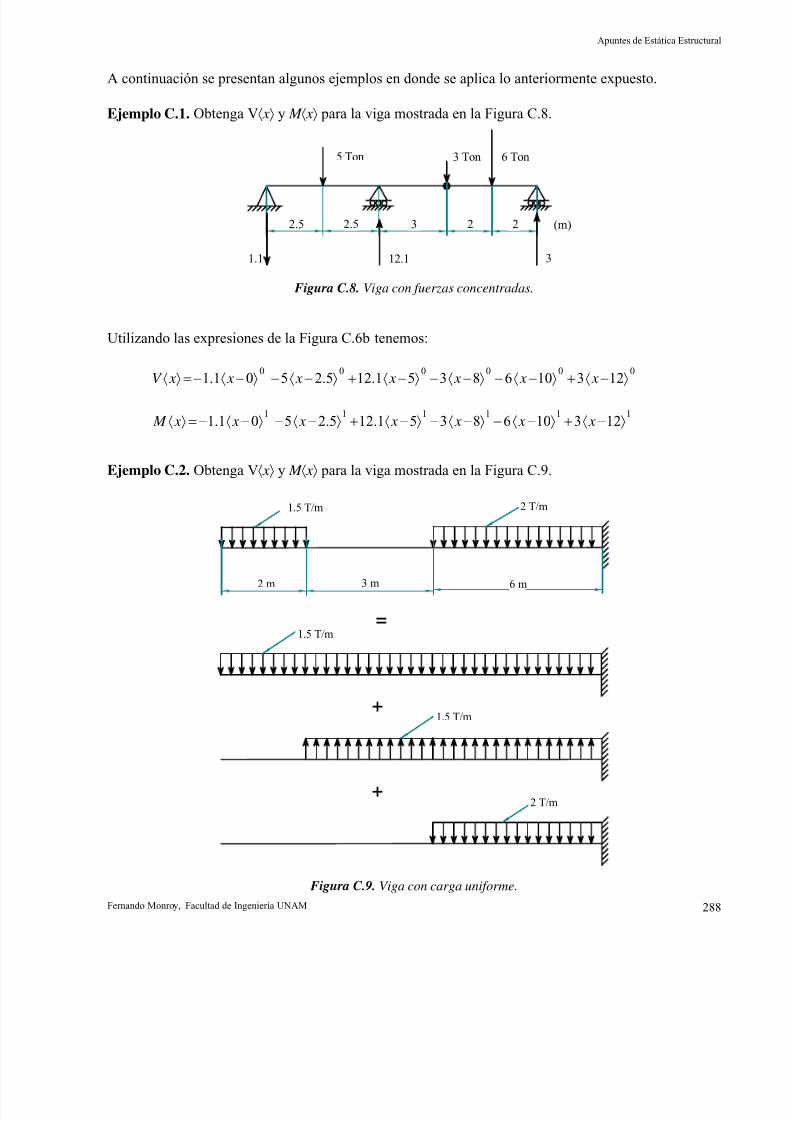
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 295/322
Apuntes de Estática Estructural
A continuación se presentan algunos ejemplos en donde se aplica lo anteriormente expuesto.
Ejemplo C.1. Obtenga V⟨ x⟩ y M ⟨ x⟩ para la viga mostrada en la Figura C.8.
31.1
5 Ton
12.1
3 Ton 6 Ton
25 25 30 20 202232.52.5 (m)
Figura C.8. Viga con fuerzas concentradas.
Utilizando las expresiones de la Figura C.6b tenemos:
000000 1231068351.125.2501.1 ⟩−⟨+⟩−⟨−⟩−⟨−⟩−⟨+⟩−⟨−⟩−⟨−=⟩⟨ x x x x x x xV
1111111231068351.125.2501.1 ⟩−⟨+⟩−⟨−⟩−⟨−⟩−⟨+⟩−⟨−⟩−⟨−=⟩⟨ x x x x x x x M
Ejemplo C.2. Obtenga V⟨ x⟩ y M ⟨ x⟩ para la viga mostrada en la Figura C.9.
Fernando Monroy, Facultad de Ingeniería UNAM 288
2 T/m
=
1.5 T/m
806 m
1.5 T/m
+1.5 T/m
+2 T/m
40 602 m 3 m
Figura C.9. Viga con carga uniforme.
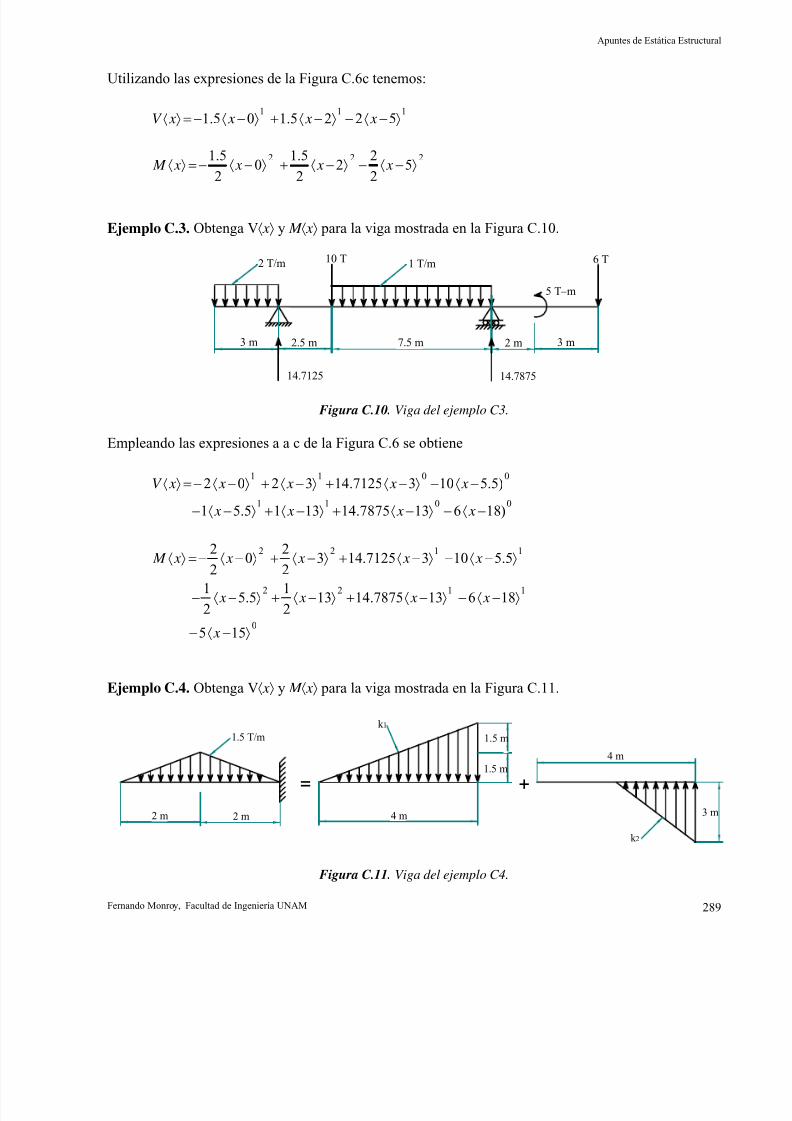
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 296/322
Apuntes de Estática Estructural
Utilizando las expresiones de la Figura C.6c tenemos:
1115225.105.1 ⟩−⟨−⟩−⟨+⟩−⟨−=⟩⟨ x x x xV
2225
2
22
2
5.10
2
5.1⟩−⟨−⟩−⟨+⟩−⟨−=⟩⟨ x x x x M
Ejemplo C.3. Obtenga V⟨ x⟩ y M ⟨ x⟩ para la viga mostrada en la Figura C.10.
1 T/m2 T/m
303 m 252.5 m 757.5 m 20 30
14.7125 14.7875
2 m 3 m
10 T
5 T−m
6 T
Figura C.10. Viga del ejemplo C3.
Empleando las expresiones a a c de la Figura C.6 se obtiene
0011
0011
)186137875.141315.51
)5.51037125.143202
−⟨−⟩−⟨+⟩−⟨+⟩−⟨−
−⟨−⟩−⟨+⟩−⟨+⟩−⟨−=⟩⟨
x x x x
x x x x xV
0
1122
1122
155
186137875.14132
15.5
2
1
5.51037125.1432
2
02
2
⟩−⟨−
⟩−⟨−⟩−⟨+⟩−⟨+⟩−⟨−
⟩−⟨−⟩−⟨+⟩−⟨+⟩−⟨−=⟩⟨
x
x x x x
x x x x x M
Ejemplo C.4. Obtenga V⟨ x⟩ y M ⟨ x⟩ para la viga mostrada en la Figura C.11.
1.5 T/m
40 402 m 2 m
=
k 1
1 5
1 5
1.5 m
1.5 m
k 2
+
3 0
804 m 3 m
804 m
Figura C.11. Viga del ejemplo C4.
Fernando Monroy, Facultad de Ingeniería UNAM 289
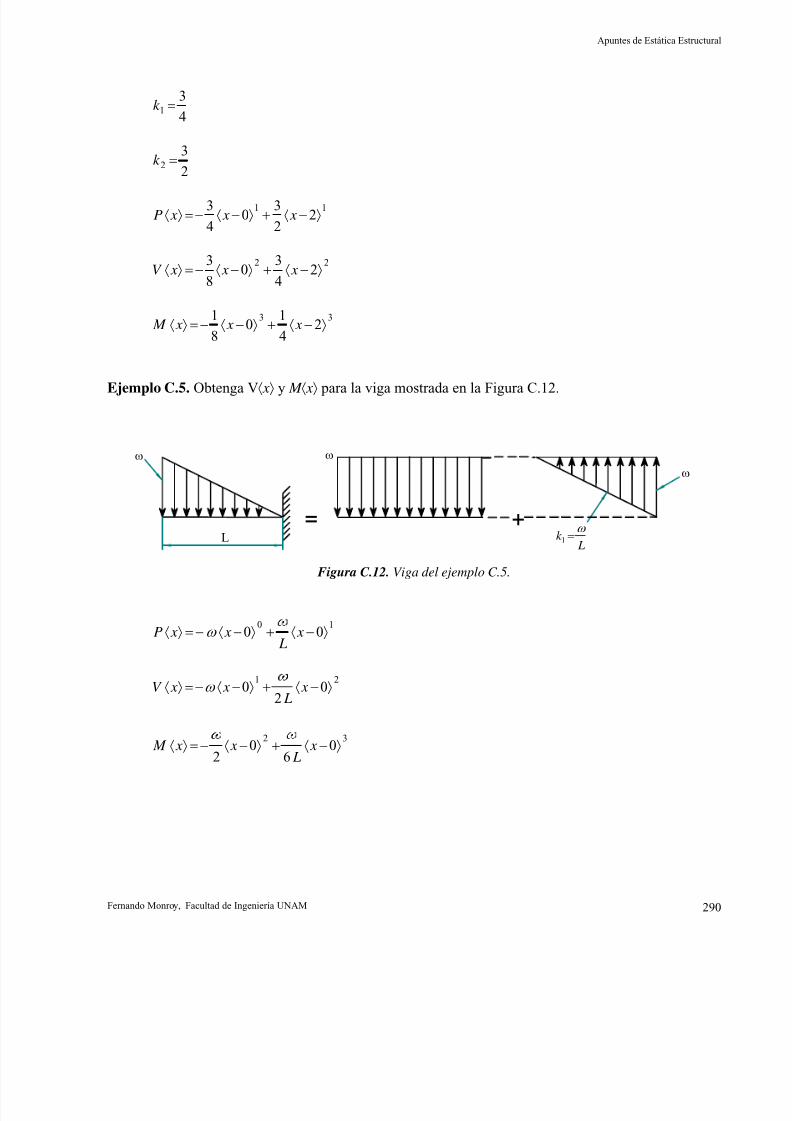
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 297/322
Apuntes de Estática Estructural
4
31 =k
2
32 =k
112
2
30
4
3⟩−⟨+⟩−⟨−=⟩⟨ x x xP
222
4
30
8
3⟩−⟨+⟩−⟨−=⟩⟨ x x xV
332
4
10
8
1⟩−⟨+⟩−⟨−=⟩⟨ x x x M
Ejemplo C.5. Obtenga V⟨ x⟩ y M ⟨ x⟩ para la viga mostrada en la Figura C.12.
= + L
k ω
=1
ω
ω
ω
50 L
Figura C.12. Viga del ejemplo C.5.
1000 ⟩−⟨+⟩−⟨−=⟩⟨ x
L x xP ω
210
20 ⟩−⟨+⟩−⟨−=⟩⟨ x
L x xV ω
32
0602 ⟩−⟨+⟩−⟨−=⟩⟨ x L x x M
Fernando Monroy, Facultad de Ingeniería UNAM 290
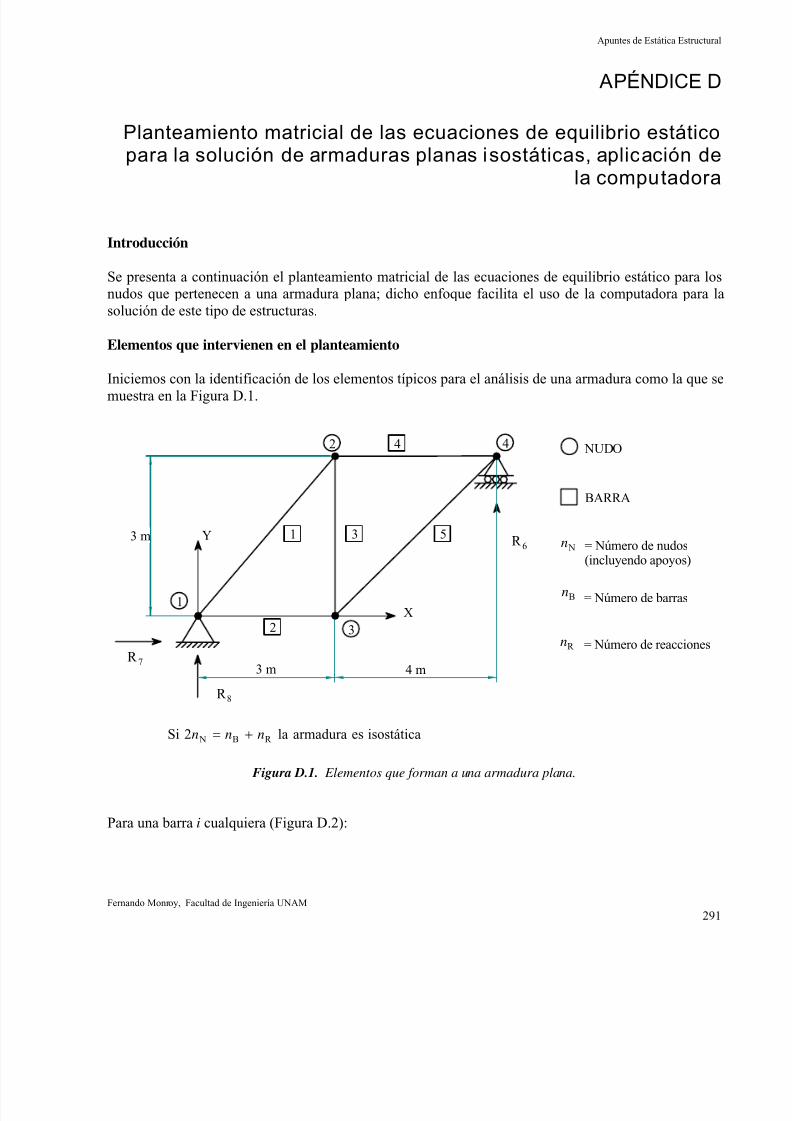
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 298/322
Apuntes de Estática Estructural
APÉNDICE D
Planteamiento matricial de las ecuaciones de equilibrio estáticopara la solución de armaduras planas isostáticas, aplicación de
la computadora
Introducción
Se presenta a continuación el planteamiento matricial de las ecuaciones de equilibrio estático para losnudos que pertenecen a una armadura plana; dicho enfoque facilita el uso de la computadora para la
solución de este tipo de estructuras.
Elementos que intervienen en el planteamiento
Iniciemos con la identificación de los elementos típicos para el análisis de una armadura como la que semuestra en la Figura D.1.
1 3 5
2
4
1
2
3
4
6 5
6555
3 m
3 m 4 m
8R
6R Y
X
NUDO
BARRA
7R
Nn
Bn
R n
= Número de nudos
(incluyendo apoyos)
= Número de barras
= Número de reacciones
isostáticaesarmadurala2Si R B N nnn +=
Figura D.1. Elementos que forman a una armadura plana.
Para una barra i cualquiera (Figura D.2):
Fernando Monroy, Facultad de Ingeniería UNAM
291

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 299/322
Apuntes de Estática Estructural
i p
i p
iu
iiθ iθ +
Compresión
Tensión
)(
)(
−
+i p
iθ
A
B
Figura D.2. Algunos elementos de la barra.
Donde:
pi = fuerza axial en la barra i
iur
= vector unitario en dirección de la barra
⎭⎬⎫
⎩⎨⎧
=i
i
isen
uθ
θ cosr
(D.1)
iθ = ángulo que forma el eje X con el eje de la barra
ii B,A = nudos extremos de la barra i
Se puede expresar al vector iur
en función de las coordenadas xA, xA, xB, y yB, de los extremos A y B
de la barra i respectivamente, así tendremos:
( ) ( )22
iiii A B A Bi y y x xl −+−=
(D.2)
il = longitud de la barra i
i
A B
il
x xii
−=θ cos (D.3)
i
A B
il
y ysen
ii−
=θ (D.4)
Fernando Monroy, Facultad de Ingeniería UNAM
292
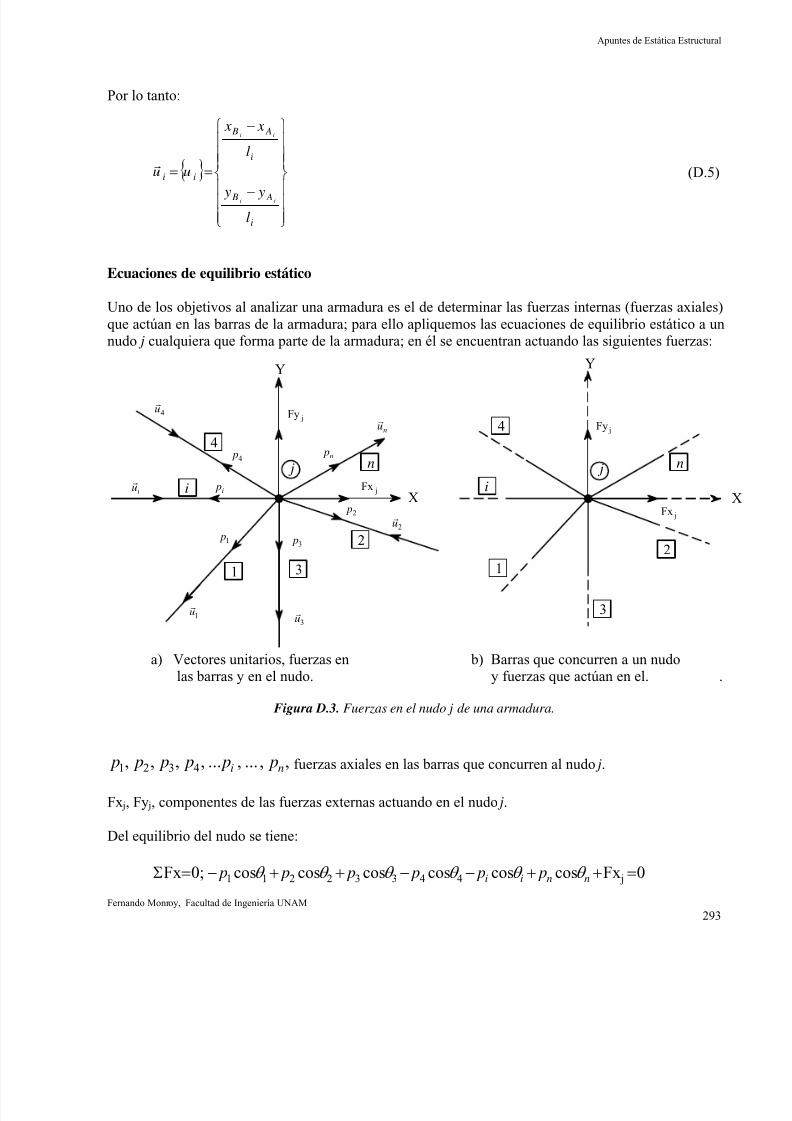
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 300/322
Apuntes de Estática Estructural
Por lo tanto:
{ }
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
−
==
i
A B
i
A B
ii
l
y y
l
x x
uu
ii
ii
r
(D.5)
Ecuaciones de equilibrio estático
Uno de los objetivos al analizar una armadura es el de determinar las fuerzas internas (fuerzas axiales)
que actúan en las barras de la armadura; para ello apliquemos las ecuaciones de equilibrio estático a unnudo j cualquiera que forma parte de la armadura; en él se encuentran actuando las siguientes fuerzas:
Y
iur
1ur
4ur
n p
jFy
nur
2 p
i p
3 p
j
jFx
n
3
2
4
i
2ur
3ur
1 p
1
4 p
jFy
j
jFx
n
3
2
4
i
1
X
Y
a) Vectores unitarios, fuerzas en b) Barras que concurren a un nudolas barras y en el nudo. y fuerzas que actúan en el. .
Figura D.3. Fuerzas en el nudo j de una armadura.
,,...,...,,,, 4321 ni p p p p p p fuerzas axiales en las barras que concurren al nudo j.
Fx j, Fy j, componentes de las fuerzas externas actuando en el nudo j.
Del equilibrio del nudo se tiene:
0Fxcoscoscoscoscoscos;0Fx j44332211 =++−−++−=Σ nnii p p p p p p θ θ θ θ θ θ
Fernando Monroy, Facultad de Ingeniería UNAM
293

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 301/322
Apuntes de Estática Estructural
Fernando Monroy, Facultad de Ingeniería UNAM
294
0Fy;0Fy j44332211 =++++−−−=Σ nnii sen psen psen psen psen psen p θ θ θ θ θ θ
Observando el sentido supuesto de las fuerzas en las barras tenemos que:
sale entra sale entra entra sale
nnii p p p p p p θ θ θ θ θ θ coscoscoscoscoscosFx 44332211 j −++−−+=
nnii sen psen psen psen psen psen p θ θ θ θ θ θ −+−+++= 44332211 jFy
Observemos los signos de los vectores unitarios de las barras que intervienen en las ecuaciones
anteriores con el objeto de sistematizar el planteamiento de las ecuaciones de equilibrio.
⎪⎭⎪⎩ 1θ sen
⎪⎬
⎪⎨=
11u
r
⎫⎧cos θ (−) sale del nudo
(−)
⎪⎭⎪⎩ 2θ sen
⎪⎬
⎪⎨=
22
cosur
⎫⎧ θ (−) entra al nudo
(+)
⎪⎭⎪⎩ 3θ sen
⎪⎬
⎪⎨=
33u
r
⎫⎧cos θ (+) sale del nudo
(−)
Lo anterior nos permite concluir lo siguiente:
Si iur
sale del nudo es iur
− en la ecuación de equilibrio.
Si iur
entra al nudo es iur
+ en la ecuación de equilibrio
Considerando lo anterior podemos escribir:
{ } { } { } { } { } { }nnii j u pu pu pu pu pu pF −++−+−= 44332211 (D.6)
Ecuación matricial de equilibrio para una armadura
El procedimiento anterior puede aplicarse a todos los nudos y expresar a las ecuaciones de equilibrio
estático en forma matricial explícita; así se tendrá (Figura D.4):

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 302/322
Apuntes de Estática Estructural
Y
Bnur
iur
Bn p
i p
5 p
j
5u
Fernando Monroy, Facultad de Ingeniería UNAM
r
X
Figura D.4. Formación de la ecuación matricial de equilibrio.
bien
ecuación matricial de equilibrio
onde
= vector de fuerzas en los nudos de orden
{ } { } { }
⎪⎪
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−+−=
⎪⎪
⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
B
B
n
ini
N
N
j
j
B
p
p
p
p
uuu
Fyn
Fxn
Fy
Fx
Fy
Fx
ni
2
1
5
51
O
{ } [ ]{ } pAF =
D
{ }F 12 × N n
= vector de fuerzas axiales en las barras, pudiéndose incluir las reacciones, de orden
= matriz de equilibrio, orden de
{ } p
( ) 1×+ R B nn
{ }A [ ] ( ) R B N nnn +×2,A
uede observarse que la matriz de equilibrio se forma por renglones dobles (Figura D.4), y la forma de
n la ecuación anterior puede verse que sí
P
solución es:
{ } [ ] { }FA1−= p
[ ] 0Adet ≠E el sistema posee solución única pudiéndose
concluir que la estructura de la cual proviene [ ]A es isost
jemplos
ática y estable.
E
295
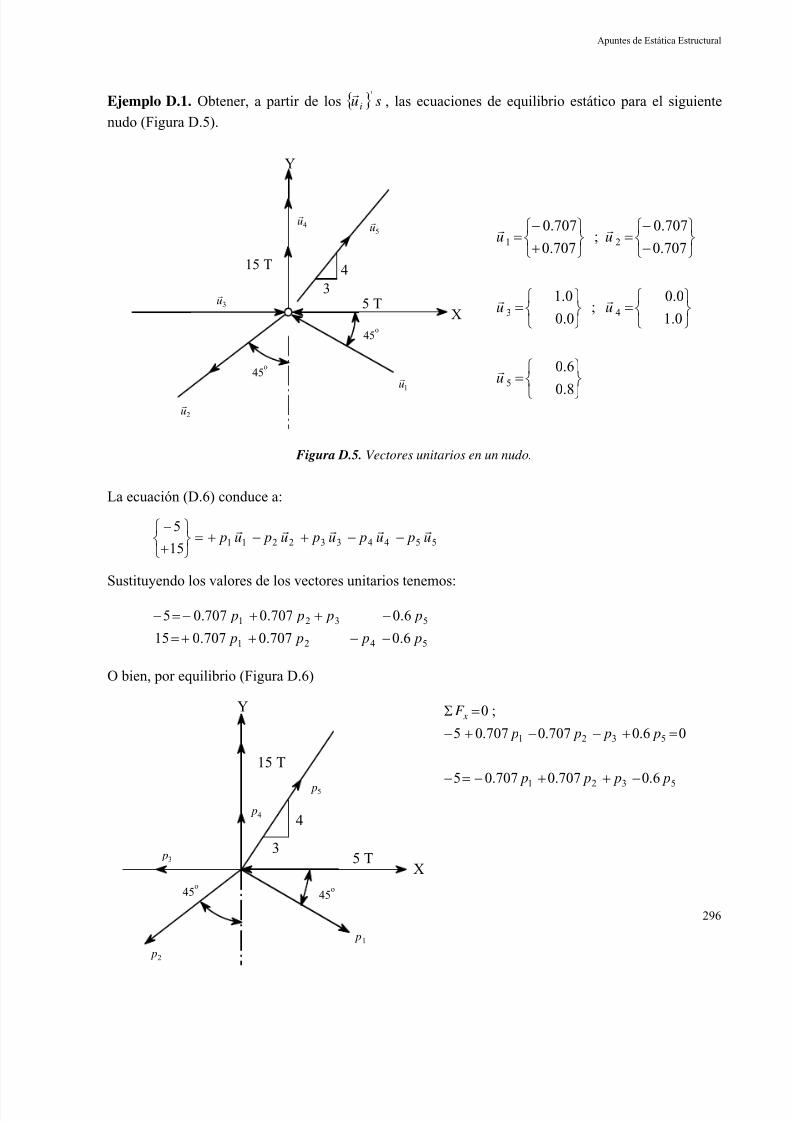
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 303/322
Apuntes de Estática Estructural
296
{ }u i's
r
Ejemplo D.1. Obtener, a partir de los
Fernando Monroy, Facultad de Ingeniería UNAM
Y
5ur
2ur
3ur
4ur
o45
X
3
4
1ur
5 T
o
45
15 T
, las ecuaciones de equilibrio estático para el siguiente
Figura D.5. Vectores unitarios en un nudo.
a ecuación (D.6) conduce a:
u pu pu pu pu p rrrrr
−−+−+=⎭⎬
⎩⎨
+
ustituyendo los valores de los vectores unitarios tenemos:
nudo (Figura D.5).
⎭⎬⎫
⎩⎨⎧
=
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=
⎭⎬⎫
⎩⎨⎧
−
−=
⎭⎬⎫
⎩⎨⎧
+
−=
8.0
6.0
0.1
0.0;
0.0
0.1
707.0
707.0;
707.0
707.0
5
43
21
u
uu
uu
r
rr
rr
L
5 ⎫⎧ −5544332211
15
S
5421
5321
6.0707.0707.015
6.0707.0707.05
p p p p
p p p p
−−++=
−++−=−
Y
o45
X
3
4
5 T
o45
15 T
5 p
2 p1 p
3 p
4 p
bien, por equilibrio (Figura D.6)
x
−++−=−
=+−−+−
O
5321
5321
6.0707.0707.05
06.0707.0707.05
;0
p p p p
p p p p
F Σ =
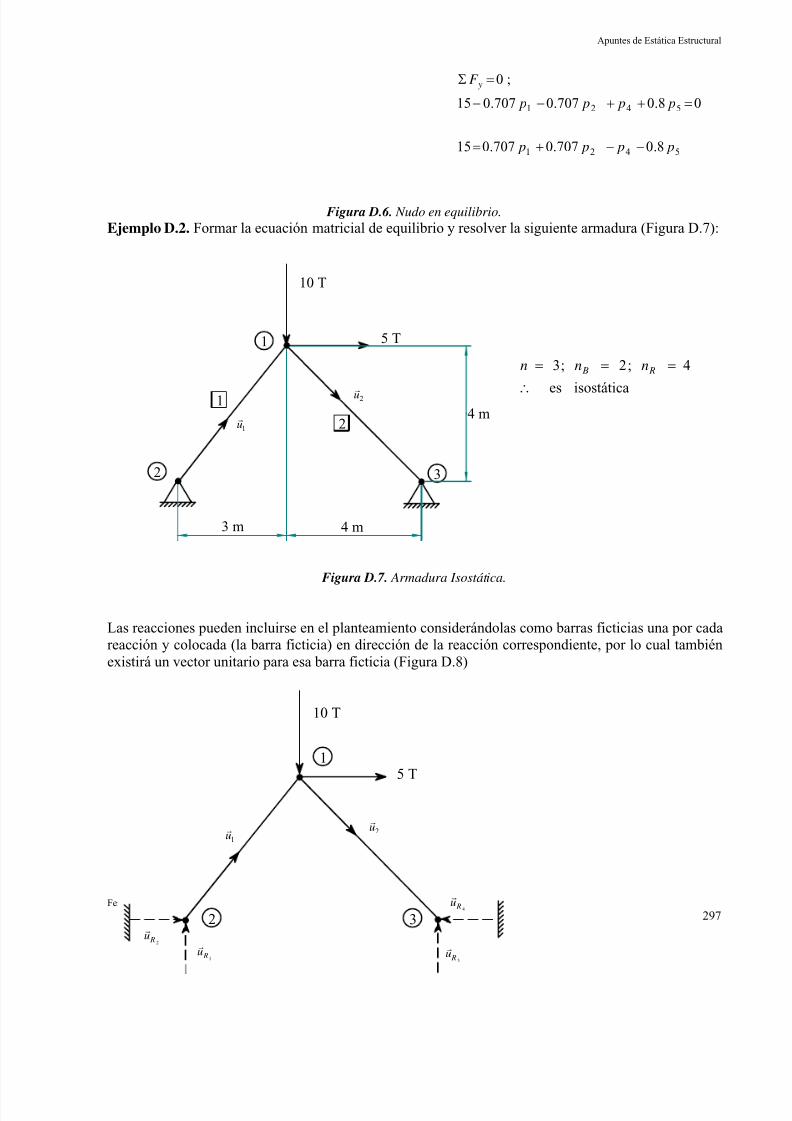
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 304/322
Apuntes de Estática Estructural
5421
5421
8.0707.0707.015
08.0707.0707.015
;0
p p p p
p p p p
F y
−−+=
=++−−
=Σ
Figura D.6. Nudo en equilibrio.
3
1
2
5 T
10 T
2ur
1ur
5 04 m
403 m 504 m
1
2
Ejemplo D.2. Formar la ecuación matricial de equilibrio y resolver la siguiente armadura (Figura D.7):
isostáticaes
4;2;3
∴
=== R B nnn
Figura D.7. Armadura Isostática.
Las reacciones pueden incluirse en el planteamiento considerándolas como barras ficticias una por cadareacción y colocada (la barra ficticia) en dirección de la reacción correspondiente, por lo cual también
existirá un vector unitario para esa barra ficticia (Figura D.8)
Fernando Monroy, Facultad de Ingeniería UNAM
3
1
2
5 T
10 T
1 Rur
2ur
2 Ru
r
1ur
3 Rur
4 Rur
297

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 305/322
Apuntes de Estática Estructural
⎭⎬⎫
⎩⎨⎧−
=⎭⎬⎫
⎩⎨⎧
=
⎭⎬⎫
⎩⎨⎧
=⎭⎬⎫
⎩⎨⎧
=
⎭⎬⎫
⎩⎨⎧
−
+=
⎭⎬⎫
⎩⎨⎧
+
+=
0
1;
1
0
0
1;
1
0
707.0
707.0
8.0
6.0
43
21
2
1
R R
R R
uu
uu
u
u
rr
rr
r
r
Figura D.8. Vectores unitarios, ejemplo D.2.
La ecuación de equilibrio es:
{ } { }
{ } { } { }
{ } { } { } ⎪⎪⎪⎪
⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎢⎢⎢⎢⎢⎢
⎣
⎡
+++
++−
−+
=
⎪⎪⎪⎪
⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪
⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
−
2
1
4
3
2
1
2
1
21
42
21
0
0
0
0
10
5
R
R
R
R
p
p
uuu
uuu
uu
3nudo
2nudo
1nudo
R R
R R
Sustituyendo tenemos:
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪
⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪
⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎢⎢
⎣
⎡
+−
−+
+−
+−
+−
−−
=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪
⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪
⎪⎪
⎨
⎧
−
2
1
4
3
2
1
0001707.00
0010707.00
010008.0
100006.0
0000707.08.0
0000707.06.0
0
0
0
0
10
5
R
R
R
R
p
p
Fernando Monroy, Facultad de Ingeniería UNAM
298

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 306/322
Apuntes de Estática Estructural
Revolviendo el sistema se obtienen las fuerzas en las barras
.Ton14.2
.Ton86.2
.Ton14.7
.Ton14.7
.Ton10.10
.Ton57.3
2
1
4
3
2
1
−=
−=
−=
−=
−=
−=
R
R
R
R
p
p
Obsérvese que las reacciones en el apoyo se pueden obtener como:
{ }ii
i
i
i u p y R
x R R −=
⎭⎬⎫
⎩⎨⎧
=r
Donde=ii R R y,x Componentes de la fuerza en la barra ficticia sobre los ejes x e y (reacciones).i p
i p = fuerza axial en la barra ficticia.
iur
= vector unitario en dirección de la barra ficticia.
Aplicándolo al ejemplo tenemos:
⎭⎬⎫
⎩⎨⎧−=
⎭⎬⎫
⎩⎨⎧
+=
⎭⎬⎫
⎩⎨⎧+
=
⎭⎬⎫
⎩⎨⎧
+=
⎭⎬⎫
⎩⎨⎧−
⎭⎬⎫
⎩⎨⎧
⎭⎬⎫
⎩⎨⎧
⎭⎬
⎫
⎩⎨
⎧
+=−
+=−
+=−
+=−
014.7
14.7
0
0
14.2
86.20
0
1
1
0
0
1
1
0
14.7
14.7
14.2
86.2
4
3
2
1
4
3
2
1
R
R
R
R
u R
u R
u R
u R
r
r
r
r
Finalmente las fuerzas sobre la armadura quedan de la siguiente manera (Figura D.9):
Fernando Monroy, Facultad de Ingeniería UNAM
299
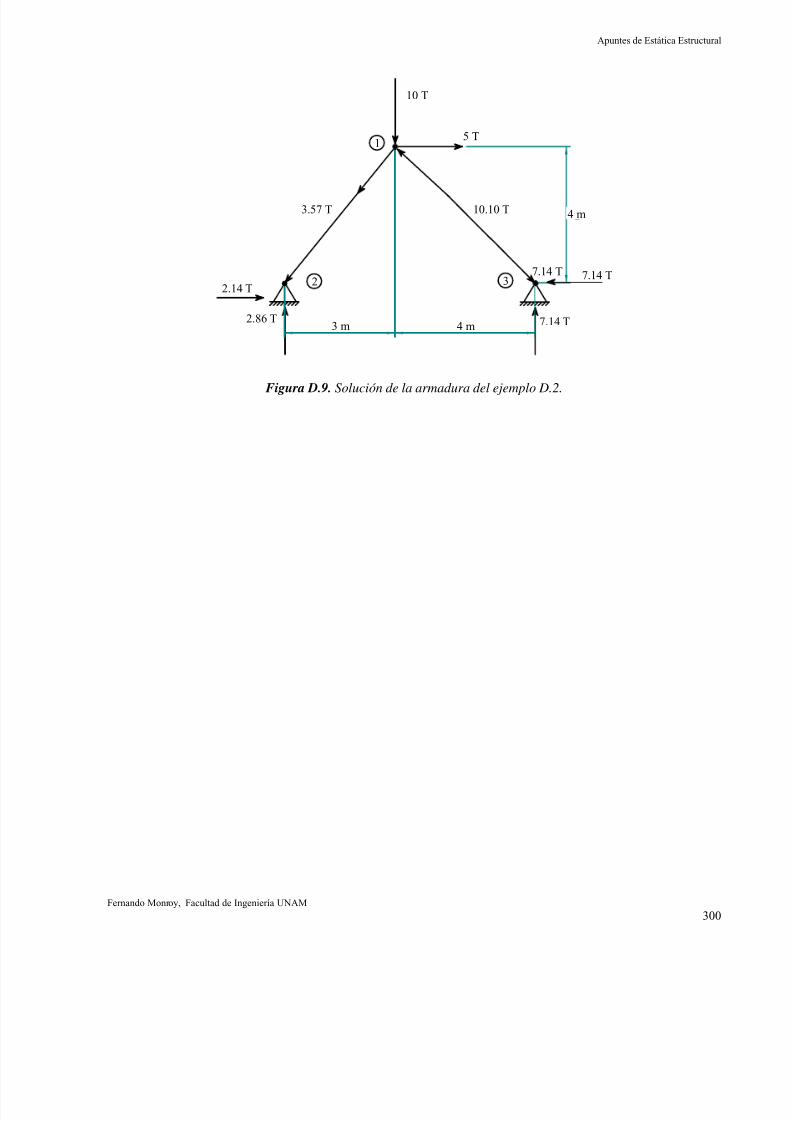
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 307/322
Apuntes de Estática Estructural
3
1
2
5 T
10 T
3.57 T 10.10 T
2.14 T
7.14 T2.86 T
6 24 m
7.14 T 7.14 T
49 633 m 4 m
Figura D.9. Solución de la armadura del ejemplo D.2.
Fernando Monroy, Facultad de Ingeniería UNAM
300

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 308/322
Apuntes de Estática estructural
APÉNDICE E
Cables flexibles e inextensibles
Introducción
Los cables se presentan como elementos en varias formas estructurales principalmente en los puentes,
aquellos pueden ser de materiales metálicos, fibras vegetales o fibras sintéticas, siendo de uso másfrecuente, en ingeniería, los cables metálicos y más recientemente los fabricados con fibras de carbono.
Para su estudio, los cables se pueden considerar: a) flexibles e inextensibles, es decir que no soncapaces de resistir flexión y que no se alargan y, b) deformables, pudiendo soportar cierta flexión.
En el primer caso el único elemento mecánico que los cables pueden transmitir es la fuerza normal positiva, es decir una fuerza de tensión, para el segundo caso además de la fuerza de tensión, éste es
capaz de desarrollar cierta flexión dependiendo de su rigidez, principalmente.
Una clasificación que se utiliza para estos elementos está en función de la condición de carga quesoportan, pudiendo ser: a) carga uniformemente repartida según el eje del cable, b) carga
uniformemente repartida según un eje horizontal y, c) cargas verticales concentradas.
Para su solución, puede establecerse primero la ecuación diferencial del cable independientemente del
tipo de carga, y después hacer el estudio particular de cada cable.
E.1 Ecuación diferencial de un cable
En la Figura E.1, se muestra una porción de un cable sujeta a las fuerzas de tensión que se transmitensegún los planos de corte así como la resultante de las fuerzas externas (Q) que actúan sobre el
elemento considerado.
o
H
Q
T
x
P (x, y)
T Q
H
6 0 ° α
6 0 ° α 5
0 ° α
Figura E.1. Fuerzas actuando en un segmento de cable.
Con relación a la Figura E.1a,
Fernando Monroy, Facultad de Ingeniería UNAM 301
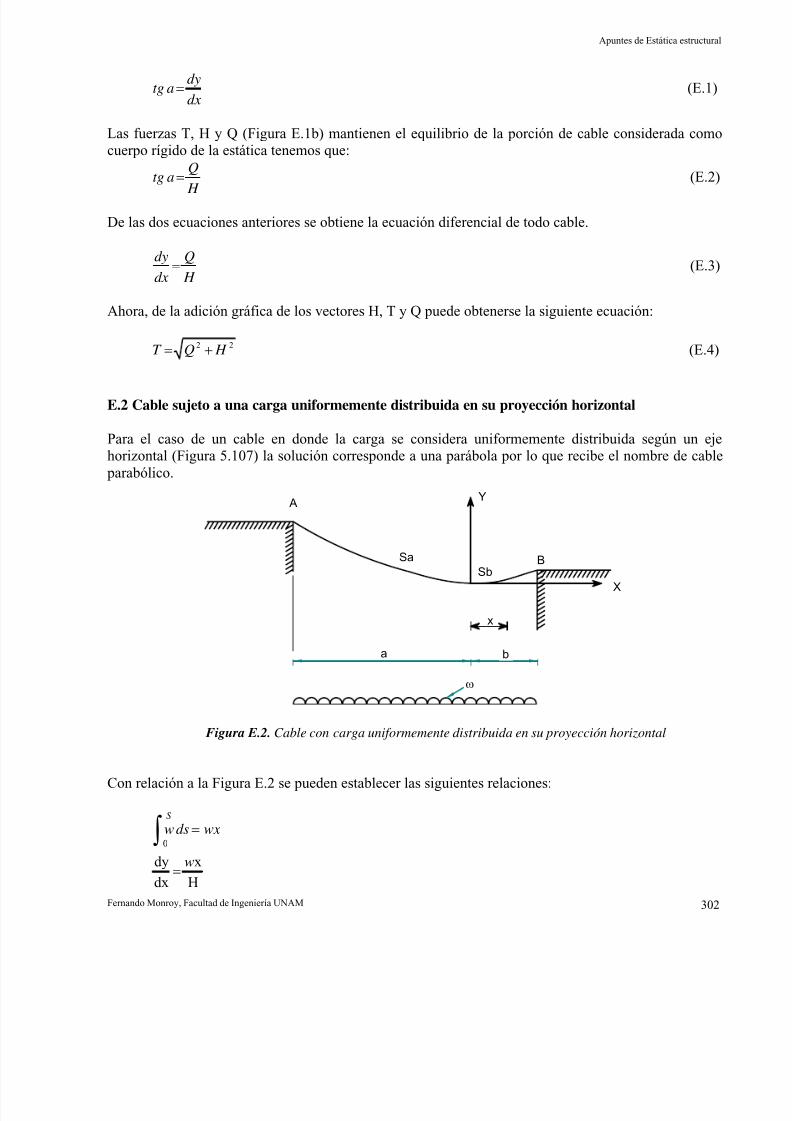
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 309/322
Apuntes de Estática estructural
dx
dyatg = (E.1)
Las fuerzas T, H y Q (Figura E.1b) mantienen el equilibrio de la porción de cable considerada comocuerpo rígido de la estática tenemos que:
H
Qatg = (E.2)
De las dos ecuaciones anteriores se obtiene la ecuación diferencial de todo cable.
H
Q
dx
dy= (E.3)
Ahora, de la adición gráfica de los vectores H, T y Q puede obtenerse la siguiente ecuación:
22 H QT += (E.4)
E.2 Cable sujeto a una carga uniformemente distribuida en su proyección horizontal
Para el caso de un cable en donde la carga se considera uniformemente distribuida según un ejehorizontal (Figura 5.107) la solución corresponde a una parábola por lo que recibe el nombre de cable
parabólico.
A
Sa
Y
Sb
X
B
x
ω
73 27a b
Figura E.2. Cable con carga uniformemente distribuida en su proyección horizontal
Con relación a la Figura E.2 se pueden establecer las siguientes relaciones:
∫ =S
xwdsw0
H
x
dx
dy w=
Fernando Monroy, Facultad de Ingeniería UNAM 302
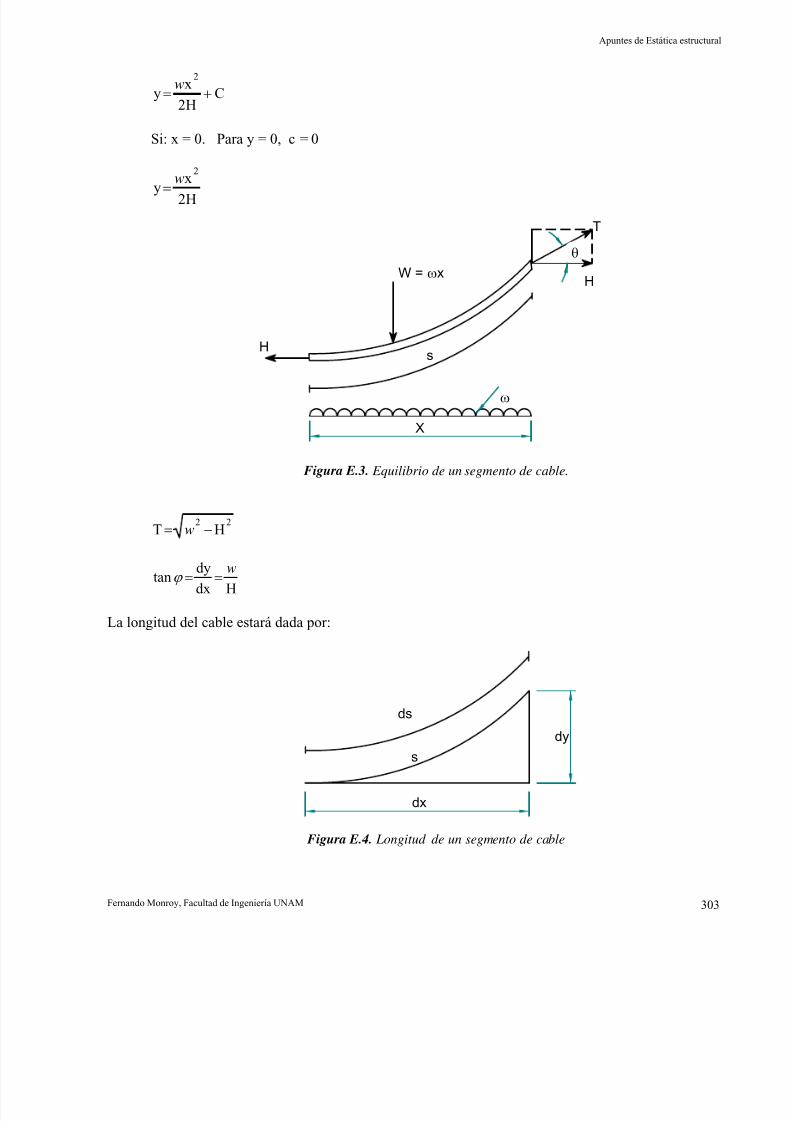
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 310/322
Apuntes de Estática estructural
CH2
xy
2
+=w
Si: x = 0. Para y = 0, c = 0
H2
xy
2w
=
ω
H
T
H
s
W = ωx
80X
2 9 ° θ
Figura E.3. Equilibrio de un segmento de cable.
22HT −= w
Hdx
dytan
w==ϕ
La longitud del cable estará dada por:
s
ds
80
3 3
dx
dy
Figura E.4. Longitud de un segmento de cable
Fernando Monroy, Facultad de Ingeniería UNAM 303
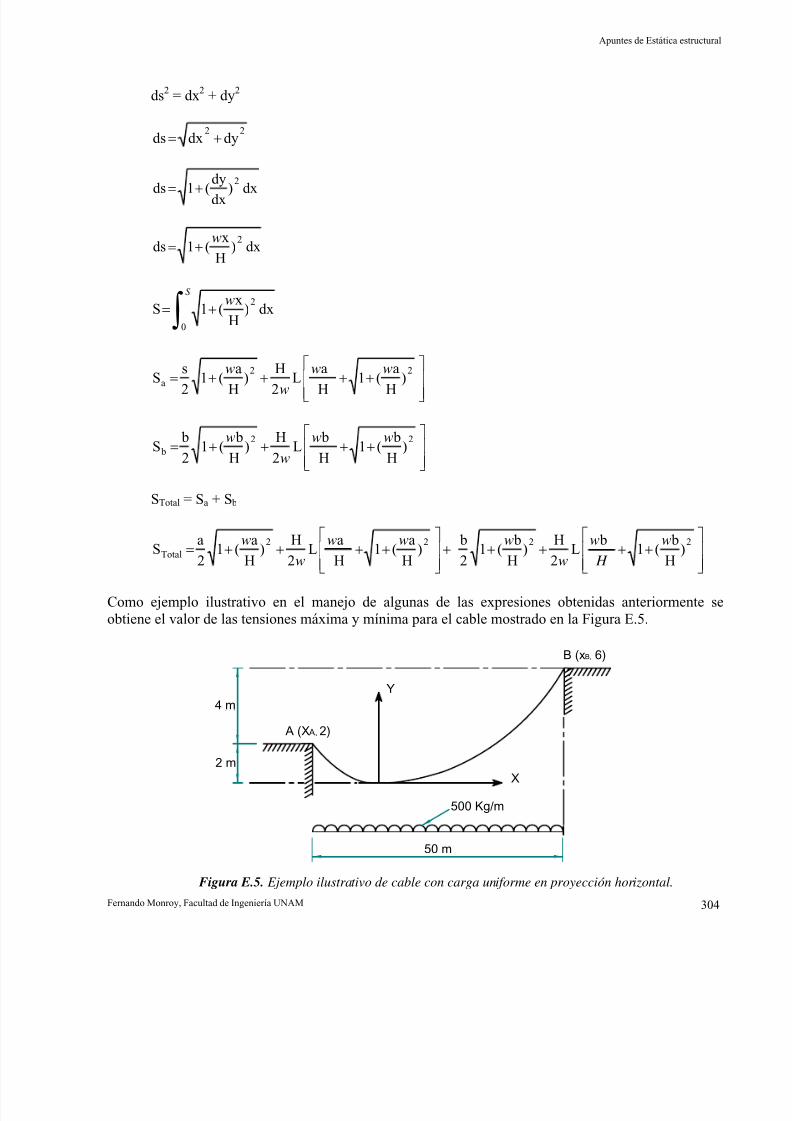
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 311/322
Apuntes de Estática estructural
ds2 = dx
2 + dy
2
22dydxds +=
dx)dx
dy(1ds
2
+=
dx)H
x(1ds
2w+=
dx)H
x(1S
2
0
wS
+=∫
⎥⎥⎦
⎤
⎢⎢⎣
⎡
++++=22
a )Ha(1
HaL
2H)
Ha(1
2sS ww
ww
⎥⎥⎦
⎤
⎢⎢⎣
⎡++++=
22
b )H
b(1
H
bL
2
H)
H
b(1
2
bS
ww
w
w
STotal = Sa + S b
+
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡++++=
22
Total )
H
a(1
H
aL
2
H)
H
a(1
2
aS
ww
w
w
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡++++
22)
H
b(1
bL
2
H)
H
b(1
2
b w
H
w
w
w
Como ejemplo ilustrativo en el manejo de algunas de las expresiones obtenidas anteriormente se
obtiene el valor de las tensiones máxima y mínima para el cable mostrado en la Figura E.5.
Fernando Monroy, Facultad de Ingeniería UNAM 304
500 Kg/m
X
B (xB, 6)
A (X A, 2)
Y
1 6
3 04 m
2 m
9950 m
Figura E.5. Ejemplo ilustrativo de cable con carga uniforme en proyección horizontal.
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 312/322
Apuntes de Estática estructural
Ecuación del cable:
H2
xy
2w
= (E.5)
(E.6)
50xx a b =−
Sustituyendo en (E.5) las coordenadas de A:
2H
x5002
2
a=
2
ax125H =
Sustituyendo el valor de (E.6)
H = 125 (x b – 50)2 (E.7)
Sustituyendo en (E.5) las coordenadas de B:
2H
500x6
2
b=
12
x500H
w
b= (E.8)
De (E.7) y (E.8)
2
b
2
b x12
500)50x(125 =−
0300001200xx8 b
2
b =+−
Resolviendo:
x b = 31.7 m.
De (E.6): xa = 31.7 – 50
xa = – 18.3 m.
De (E.7): H = 123(31.7 – 50)2
H = 42000 Kg. Tensión mínima
Fernando Monroy, Facultad de Ingeniería UNAM 305
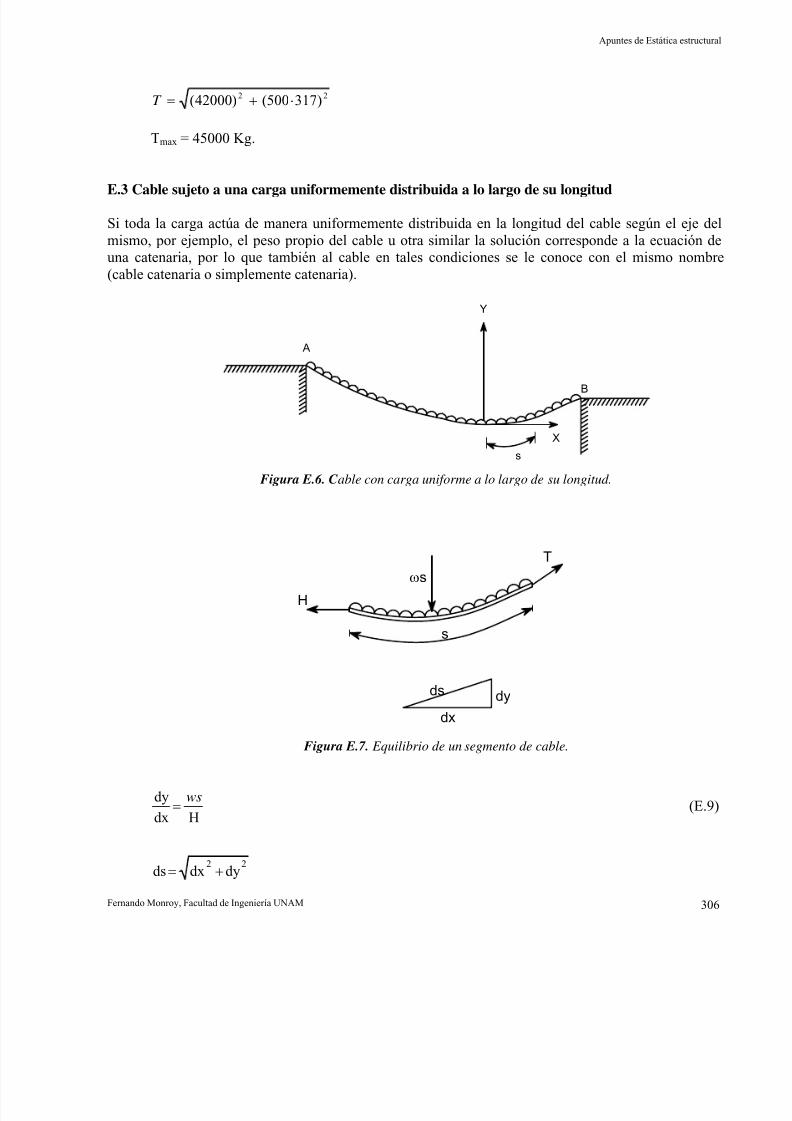
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 313/322
Apuntes de Estática estructural
22 )317500()42000( ⋅+=T
Tmax = 45000 Kg.
E.3 Cable sujeto a una carga uniformemente distribuida a lo largo de su longitud
Si toda la carga actúa de manera uniformemente distribuida en la longitud del cable según el eje del
mismo, por ejemplo, el peso propio del cable u otra similar la solución corresponde a la ecuación deuna catenaria, por lo que también al cable en tales condiciones se le conoce con el mismo nombre
(cable catenaria o simplemente catenaria).
A
Y
X
B
s
Figura E.6. C able con carga uniforme a lo largo de su longitud.
T
s
ωs
ds
dx
dy
H
Figura E.7. Equilibrio de un segmento de cable.
Hdx
dy ws= (E.9)
22dydxds +=
Fernando Monroy, Facultad de Ingeniería UNAM 306
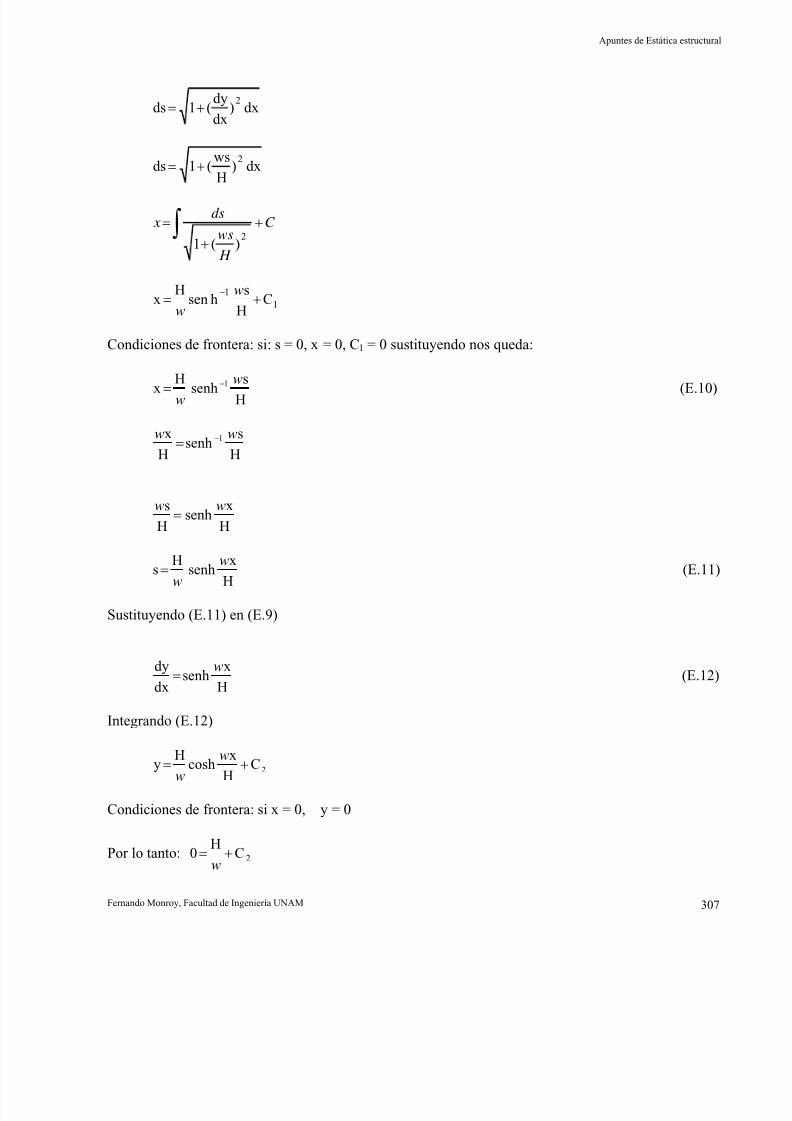
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 314/322
Apuntes de Estática estructural
dx)dx
dy(1ds
2+=
dx)H
ws(1ds
2+=
C
H
sw
ds x +
+
=∫ 2)(1
1
1C
H
shsen
Hx +=
− w
w
Condiciones de frontera: si: s = 0, x = 0, C1 = 0 sustituyendo nos queda:
H
ssenhHx 1 w
w
−= (E.10)
H
ssenh
H
x 1 ww −=
H
xsenh
H
s ww=
HxsenhHs w
w= (E.11)
Sustituyendo (E.11) en (E.9)
H
xsenh
dx
dy w= (E.12)
Integrando (E.12)
2CH
xcoshHy += w
w
Condiciones de frontera: si x = 0, y = 0
Por lo tanto: 2CH
0 +=w
Fernando Monroy, Facultad de Ingeniería UNAM 307
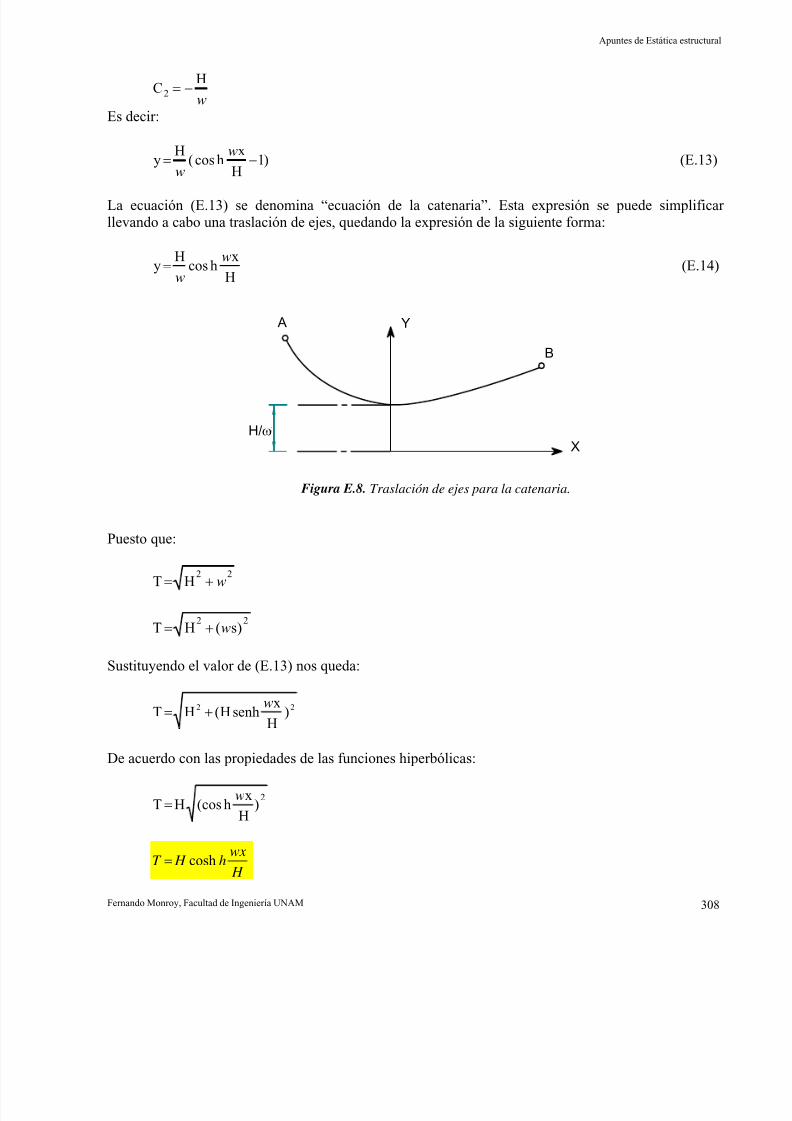
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 315/322
Apuntes de Estática estructural
w
HC2 −=
Es decir:
)1H
xhcos(
Hy −=
w
w (E.13)
La ecuación (E.13) se denomina “ecuación de la catenaria”. Esta expresión se puede simplificarllevando a cabo una traslación de ejes, quedando la expresión de la siguiente forma:
H
xhcos
Hy
w
w= (E.14)
Y A
B
X
1 7H/ω
Figura E.8. Traslación de ejes para la catenaria.
Puesto que:
22HT w+=
22)s(HT w+=
Sustituyendo el valor de (E.13) nos queda:
22 )H
xsenhH(HT
w+=
De acuerdo con las propiedades de las funciones hiperbólicas:
2)
H
xhcos(HT
w=
Fernando Monroy, Facultad de Ingeniería UNAM 308
H
wxh H T cosh=
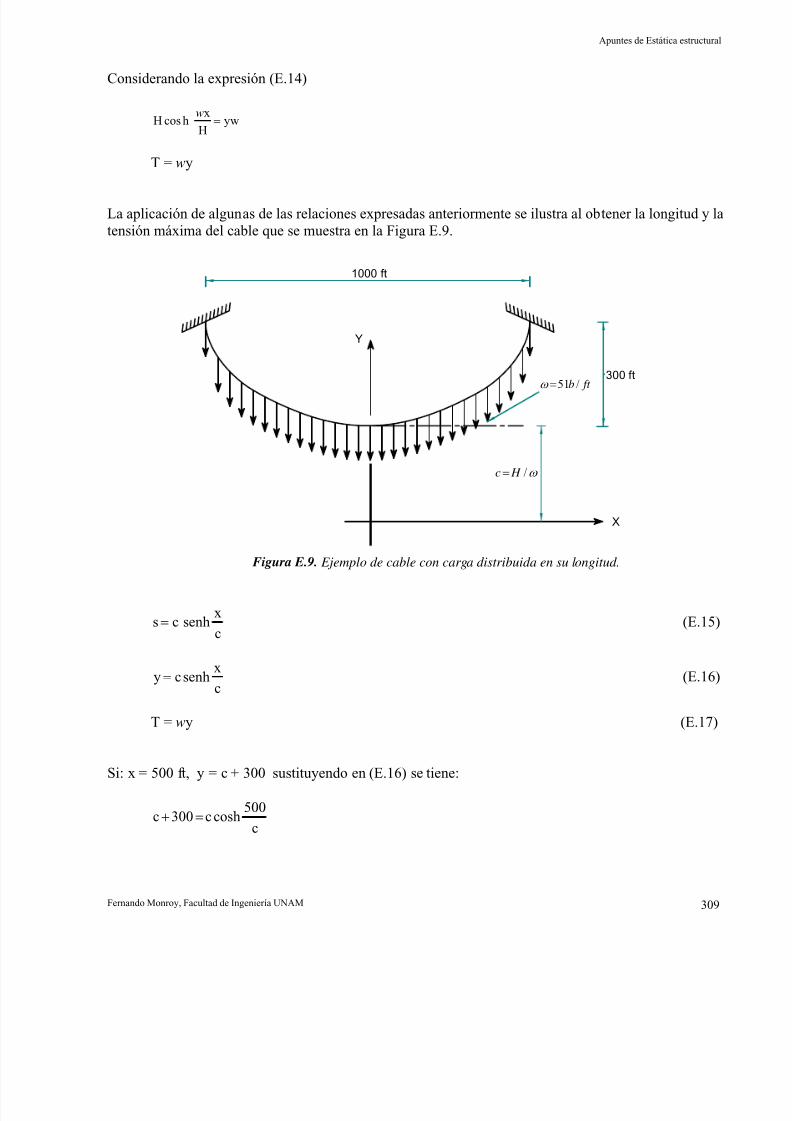
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 316/322
Apuntes de Estática estructural
Considerando la expresión (E.14)
ywH
xhcosH =
w
T = wy
La aplicación de algunas de las relaciones expresadas anteriormente se ilustra al obtener la longitud y la
tensión máxima del cable que se muestra en la Figura E.9.
138
4 1
ft b /51=ω
Y
X
1000 ft
ω / H c=
4 5
300 ft
Figura E.9. Ejemplo de cable con carga distribuida en su longitud.
c
xsenhcs= (E.15)
c
xsenhcy= (E.16)
T = wy (E.17)
Si: x = 500 ft, y = c + 300 sustituyendo en (E.16) se tiene:
c
500coshc300c =+
Fernando Monroy, Facultad de Ingeniería UNAM 309

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 317/322
Apuntes de Estática estructural
c
500cosh
300cc
+=
Obtendremos el valor de “c” por tanteos, es decir por aproximaciones sucesivas de acuerdo con la tablaE.1:
Tabla E.1. Cálculos para el cable de la Figura E.9.
c c + 300 c
500
c
500cosh
c
500cosh
300cc
+=
500 800 1.0 1.543 515
550 850 0.91 1.444 585
400 700 1.25 1.898 370
450 750 1.11 1.680 448
c = 450 ft.
L = 2 Smáx
De (E.15)
L = 2(450) sen450
500h
L = 900 senh (1.11)
L = 900 (1.352)
L = 1210 ft.
Y de (E.17)
Tmáx = wymáx
Tmáx = 5(750)
Tmáx = 3750 ft.
E.4 Cable sujeto a cargas concentradas
Los cables sujetos a cargas concentradas similares al que se muestra en la figura son los más sencillos
de resolver, generalmente se dispone de algún dato como, por ejemplo, la posición de algún punto
Fernando Monroy, Facultad de Ingeniería UNAM 310

7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 318/322
Apuntes de Estática estructural
intermedio del cable. A manera de ejemplo, si hc = 6m obtener: hB, hD, Ax, Ay, Ex, Ey (Reacciones en
los apoyos) así como la configuración del cable de la Figura E.10.
A
B
B
C
D
Er
Ex
Ay
Ax
200 Kg
300 Kg
400 Kg
30 30 30 3010 m 10 m 10 m 10 m
2 5
3 5
hB
hC
2 5hD
Figura E.10. Cable sujeto a cargas concentradas.
Por equilibrio del conjunto:
0=Σ xF
(E.18)xx EA =
0ME =Σ
Ay (40) – 200 (30) – 300 (20) – 400 (10) = 0
400
40060006000A y
++=
4
1600A y =
Ay = 400 Kg.
0Fy =Σ
Ey – 200 – 300 – 400 + 400 = 0
Ey = 500 Kg.
Tramo ABC
Fernando Monroy, Facultad de Ingeniería UNAM 311
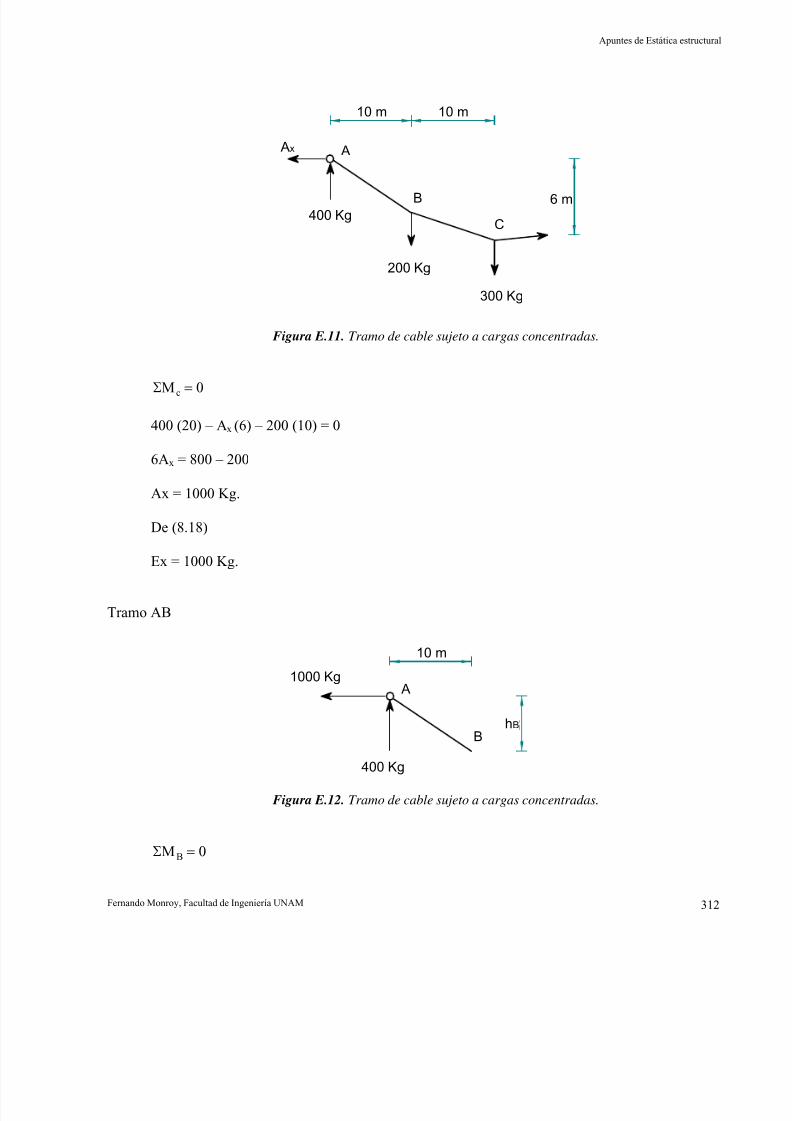
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 319/322
Apuntes de Estática estructural
A
B
C
Ax
200 Kg
300 Kg
400 Kg
29 3010 m 10 m
2 76 m
Figura E.11. Tramo de cable sujeto a cargas concentradas.
0M c =Σ
400 (20) – Ax (6) – 200 (10) = 0
6Ax = 800 – 200
Ax = 1000 Kg.
De (8.18)
Ex = 1000 Kg.
Fernando Monroy, Facultad de Ingeniería UNAM 312
Tramo AB
A
B
1000 Kg
400 Kg
2910 m
2 0hB
Figura E.12. Tramo de cable sujeto a cargas concentradas.
0MB =Σ
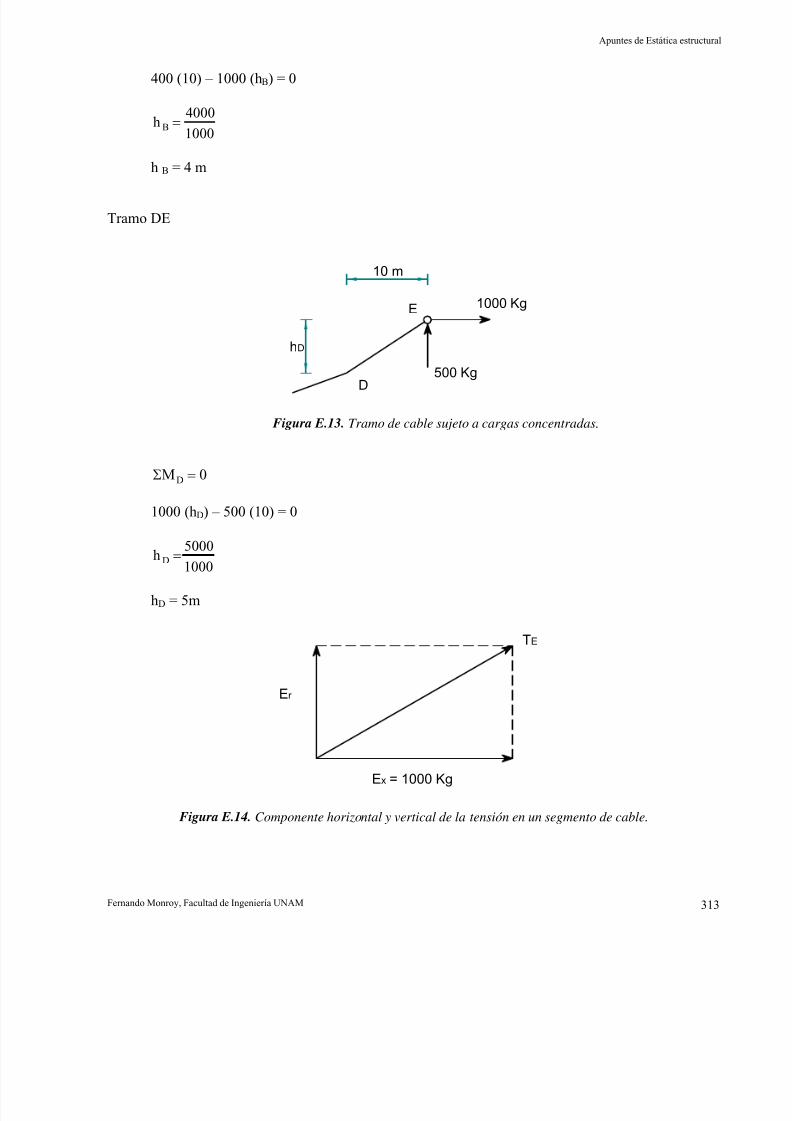
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 320/322
Apuntes de Estática estructural
400 (10) – 1000 (hB) = 0
1000
4000h B =
h B = 4 m
Tramo DE
E
D 500 Kg
1000 Kg
29
1 9
10 m
hD
Figura E.13. Tramo de cable sujeto a cargas concentradas.
0MD =Σ
1000 (hD) – 500 (10) = 0
1000
5000h
D =
hD = 5m
Er
TE
Ex = 1000 Kg
Figura E.14. Componente horizontal y vertical de la tensión en un segmento de cable.
Fernando Monroy, Facultad de Ingeniería UNAM 313
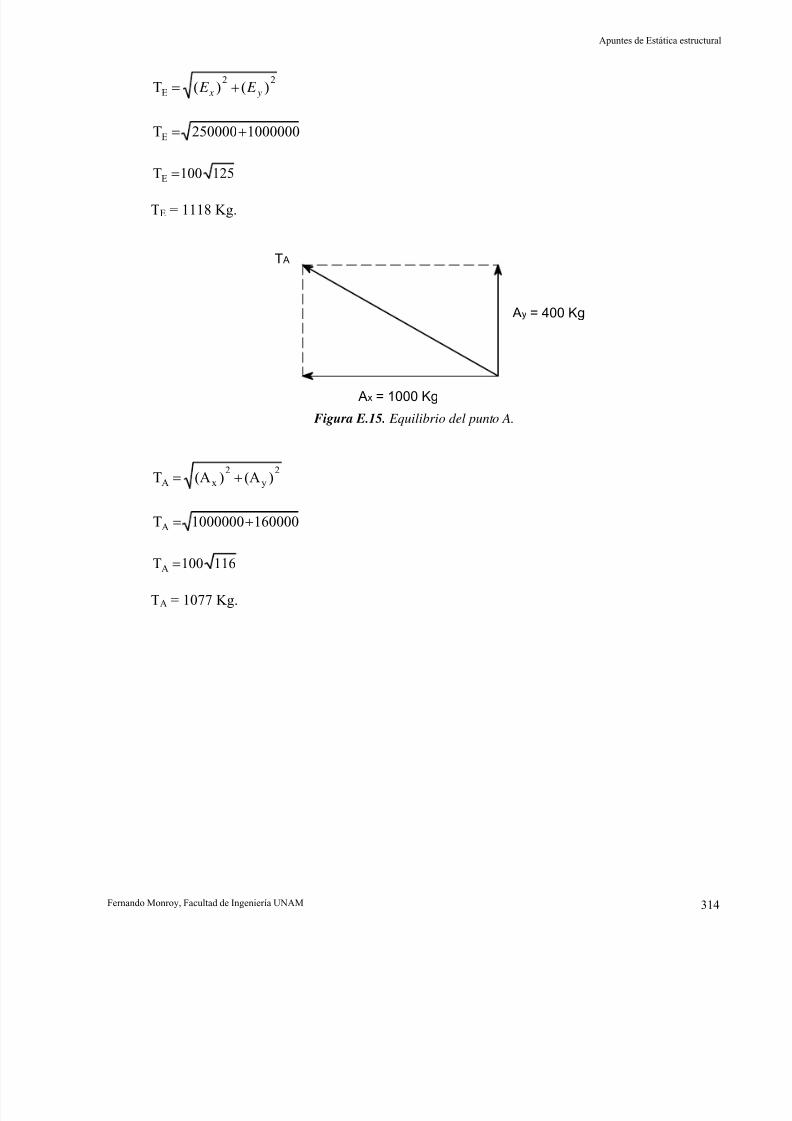
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 321/322
Apuntes de Estática estructural
22
E )()(T y x E E +=
1000000250000TE +=
125100TE =
TE = 1118 Kg.
Ay = 400 Kg
T A
Ax = 1000 Kg
Figura E.15. Equilibrio del punto A.
2
y
2
xA )(A)(AT +=
1600001000000TA +=
116100TA =
TA = 1077 Kg.
Fernando Monroy, Facultad de Ingeniería UNAM 314
7/18/2019 Apuntes Estática Estructural f Monroy Fi Unam 2008
http://slidepdf.com/reader/full/apuntes-estatica-estructural-f-monroy-fi-unam-2008 322/322
BIBLIOGRAFÍA
1. Murrieta Necoechea, Antonio. (1994): Aplicaciones de la Estática. Segunda Edición.
Limusa.
2. Meli, Roberto. (1990): Diseño Estructural. Limusa.
3. Hibbeler, R.C. (1995): Ingeniería Mecánica Estática. Séptima Edición. Prentice-Hall
4. Popov, E.P. (1996): Introducción a la Mecánica de Sólidos. Limusa.
5. McCormac, Jack. (1994): Estructuras Análisis y Diseño: Métodos Cásico y Matricial. Tomo
I. Alfaomega.
6. Reglamento de Construcciones para el Distrito Federal. (2004).
7. Normas Técnicas Complementarias del Reglamento de Construcciones para el DistritoFederal. (2004). (Consultadas en la página web de la Sociedad Mexicana de Ingeniería
Estructural www.smie.org.mx).
8. Herrejón de la Torre, Luis (1987). Apuntes de Estructuras Isostáticas. Facultad de
Ingeniería.
9. Monroy Miranda, Fernando y Rodríguez Vega, Miguel A. (1997): Problemas Propuestos dela Materia Estructuras Isostáticas. UNAM. Facultad de Ingeniería.
10.
Universidad Nacional Autónoma de México. (1986): Ingeniería: Órgano oficial de laFacultad de Ingeniería. Número 4.
11. Arnal Simón, Luis. (1995): Reglamento de Construcciones para el Distrito Federal:Comentado. Trillas.
12. Programa de la materia “Estática Estructural”. (1995).
13. Apuntes de la clase Estructuras Isostáticas, Facultad de Ingeniería UNAM, México(1995).
14. Ejemplos de Estructuras Isostáticas (Enunciados y Soluciones)
Sección de Estructuras,Facultad de Ingeniería UNAM.
15. Análisis de Estructuras Isostáticas. Ing. Sergio Gerard Bertrand.
16. Mecánica Aplicada. Jaime Torres H.
Representaciones y Servicios de Ingeniería, S. A.