apuntes de diseño de instalación eléctrica
TRANSCRIPT
Apuntes de Diseño de Instalación Eléctrica
Universidad Politécnica de Valencia
Escuela Politécnica Superior de Alcoy
Departamento de Ingeniería Eléctrica
Autores:
José Manuel Diez Aznar
Pedro Ángel Blasco Espinosa
Índice
Bloque 1: Introducción a los automatismos
Tema 1: Generalidades.
1.1. Concepto.
1.2. Estructura general de un automatismo.
1.3. Tecnologías de implementación.
1.4. Tipos de automatismos.
Tema 2: Componentes.
2.1. Tipos de señales.
2.2. Elementos de protección.
2.3. Elementos de mando y maniobra.
2.4. Elementos de control.
Tema 3: Normas de representación de automatismos.
3.1. Esquema de potencia y esquema de mando.
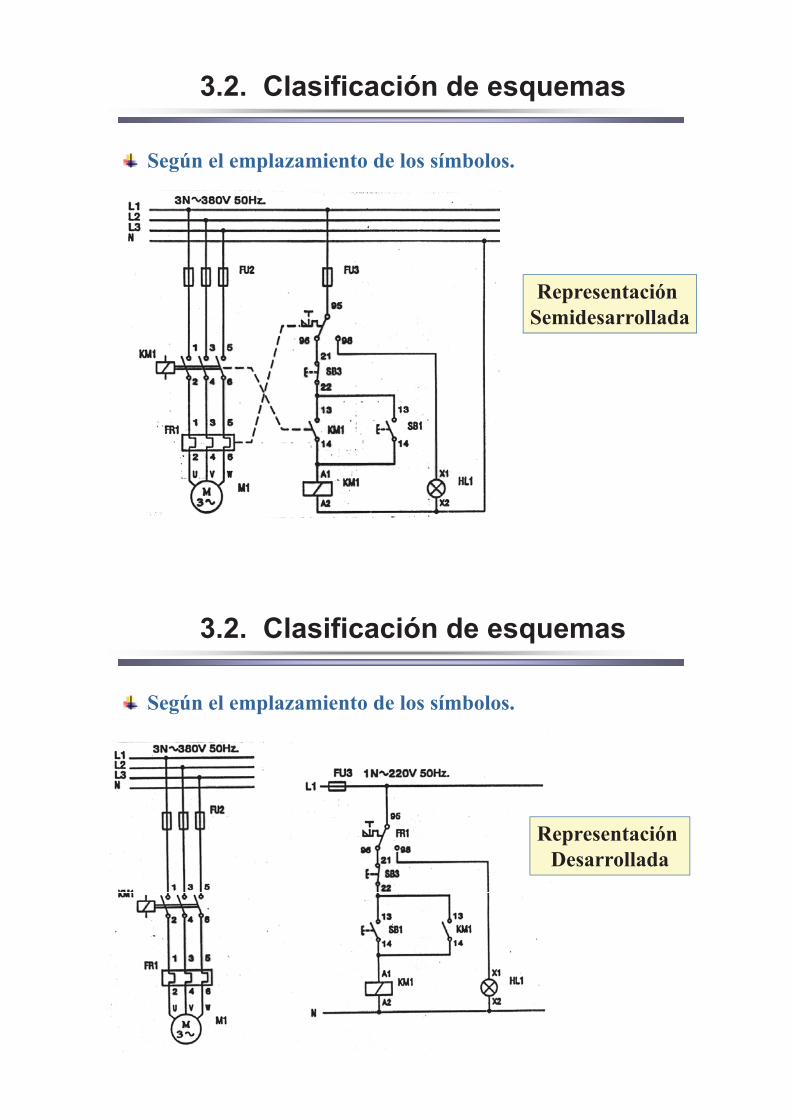
3.2. Clasificación de esquemas.
3.3. Normas de representación.
Bloque 2: Diseño de automatismos cableados
Tema 4: Generalidades.
4.1. Elemento accionado y su codificación.
4.2. Expresiones lógicas. Algebra de Boole.
Tema 5: Automatismos sin memoria.
5.1. Introducción.
5.2. Símbolo representativo. Monodo.
5.3. Ecuación de accionamiento.
5.4. Representación de esquema de mando.
Tema 6: Automatismos con memoria.
6.1. Introducción.
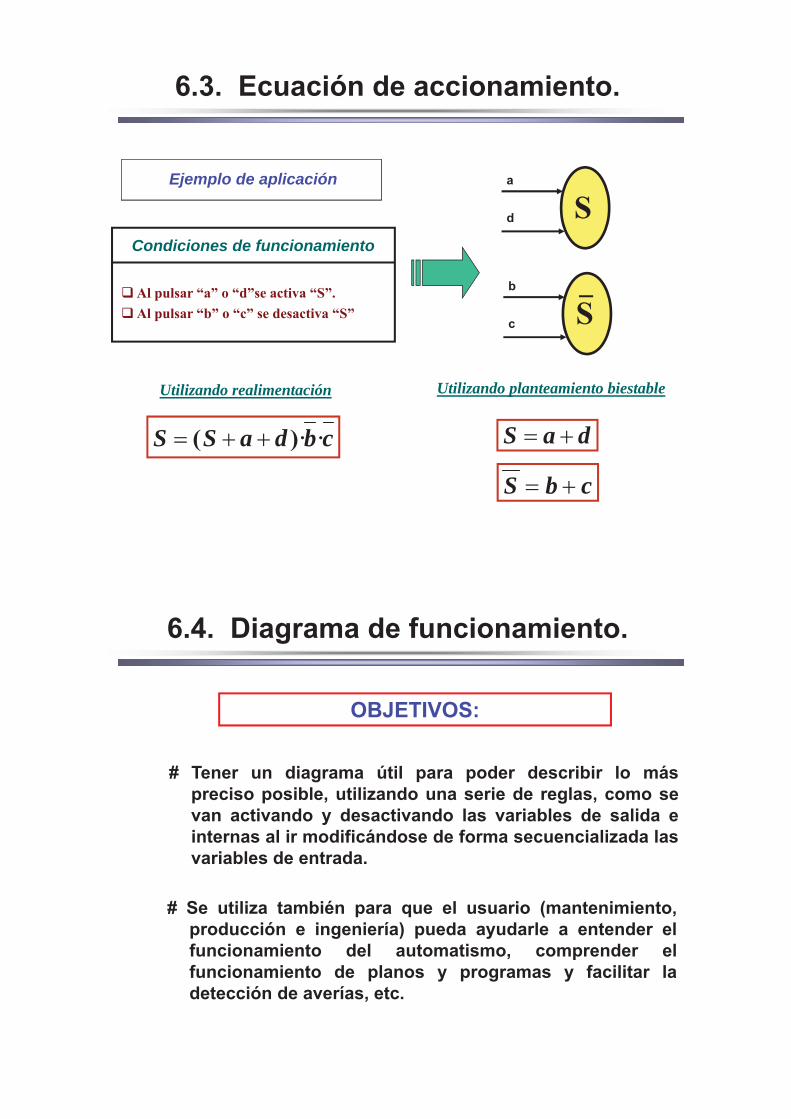
6.2. Símbolo representativo. Binodo.
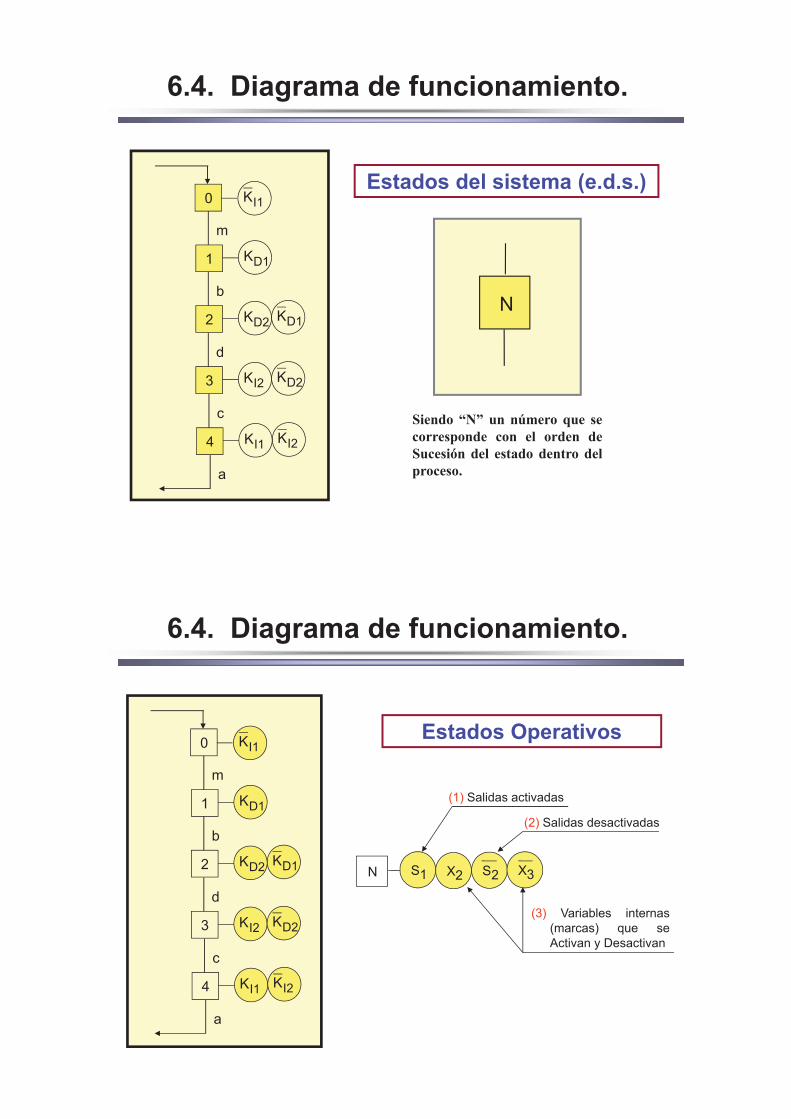
6.3. Ecuación de accionamiento.
6.4. Diagrama de funcionamiento.4.3.- Accesorios y aparatos genéricos.
Bloque 3: Diseño de automatismos programados
Tema 7: Generalidades.
7.1. Introducción.
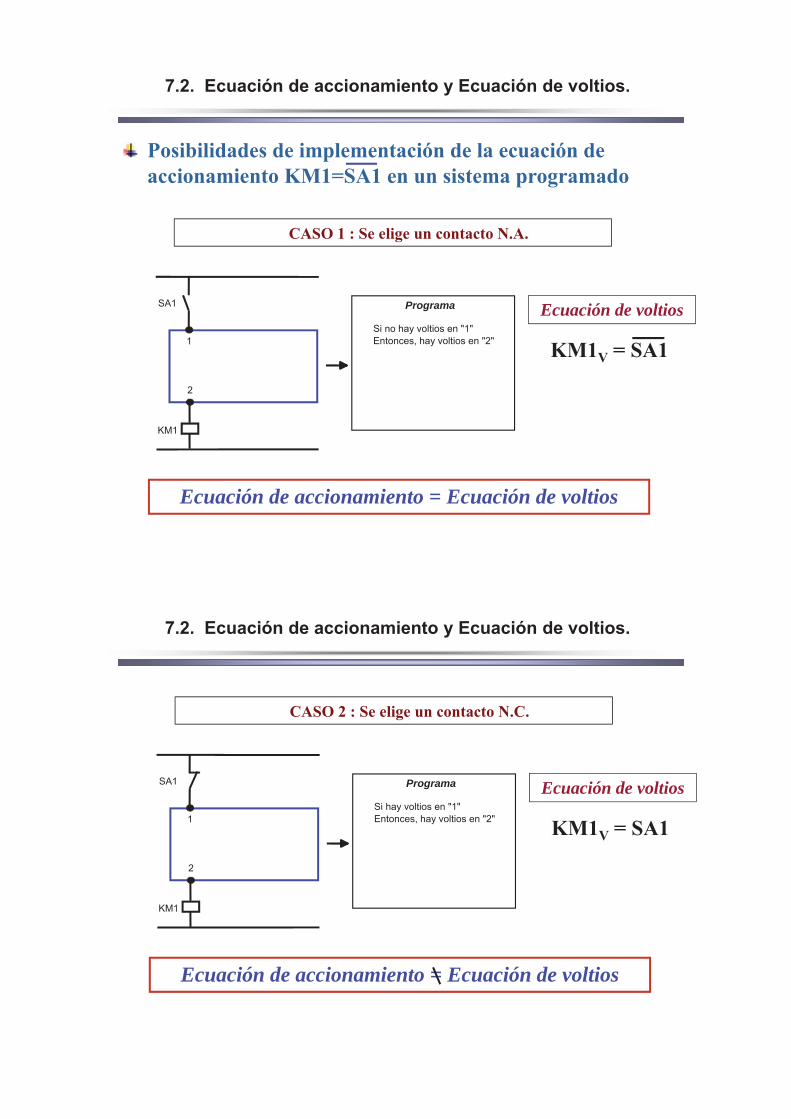
7.2. Ecuación de accionamiento y ecuación de voltios.
7.3. Procedimiento general de diseño.
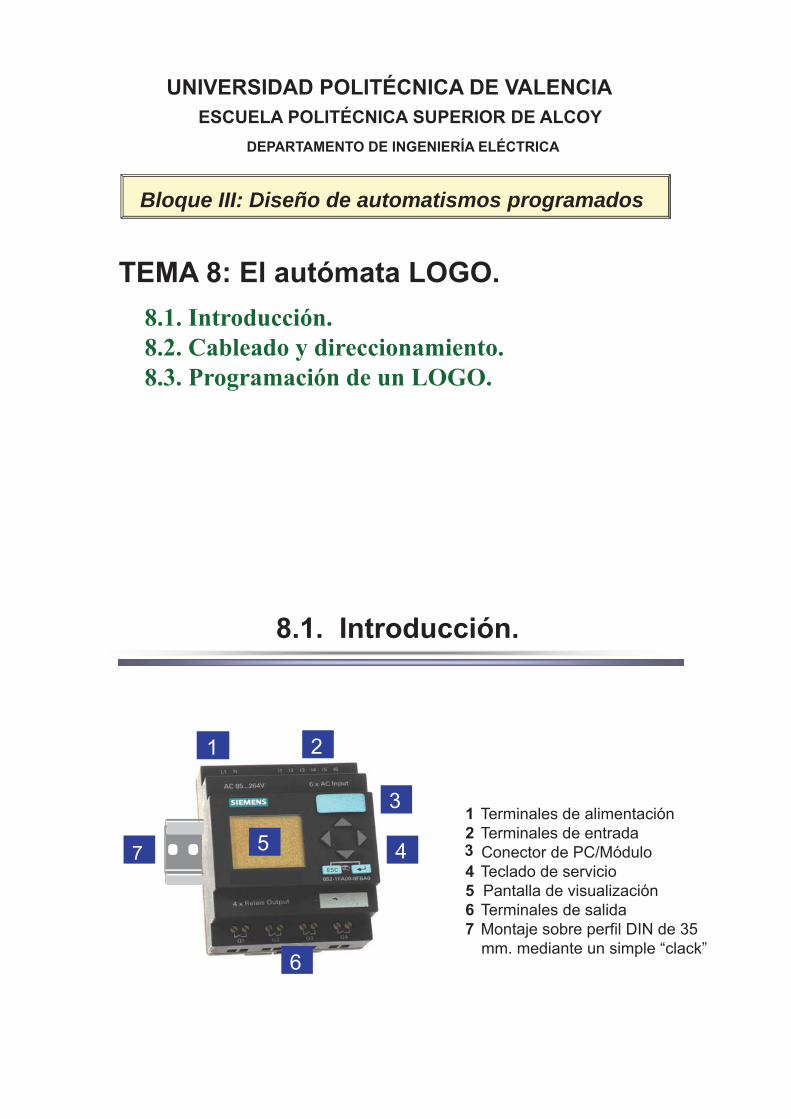
Tema 8: El autómata LOGO.
8.1. Introducción.
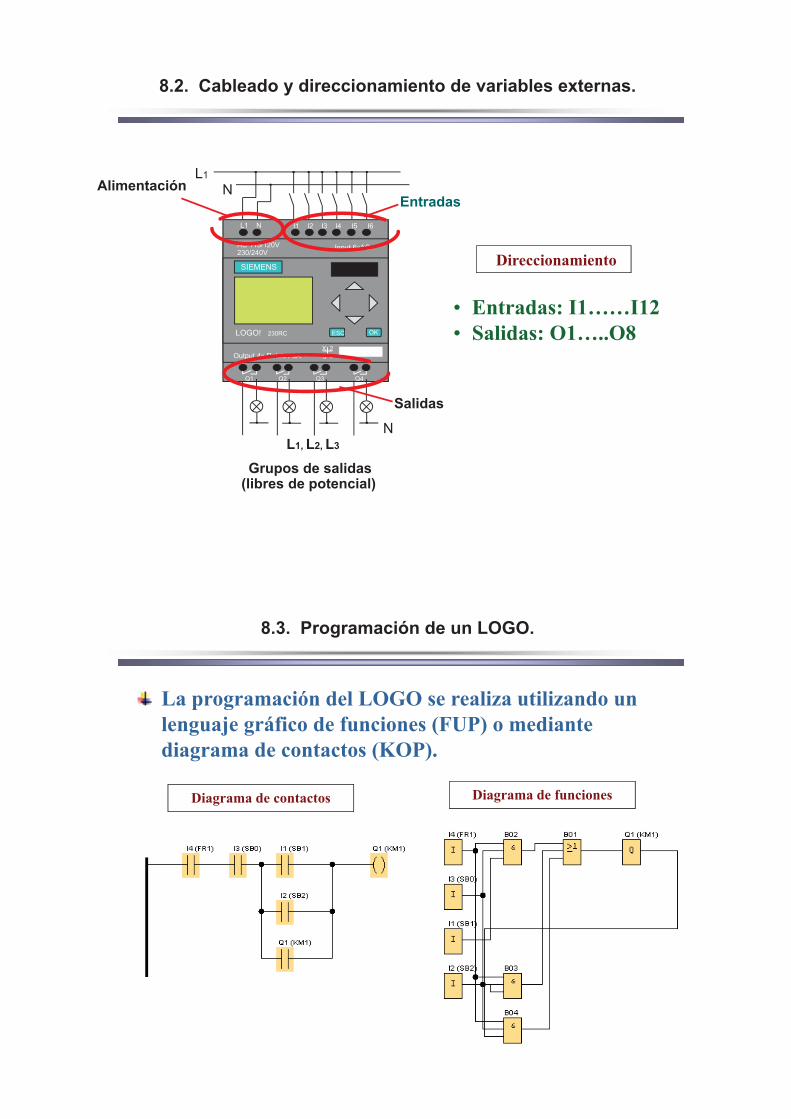
8.2. Cableado y direccionamiento.
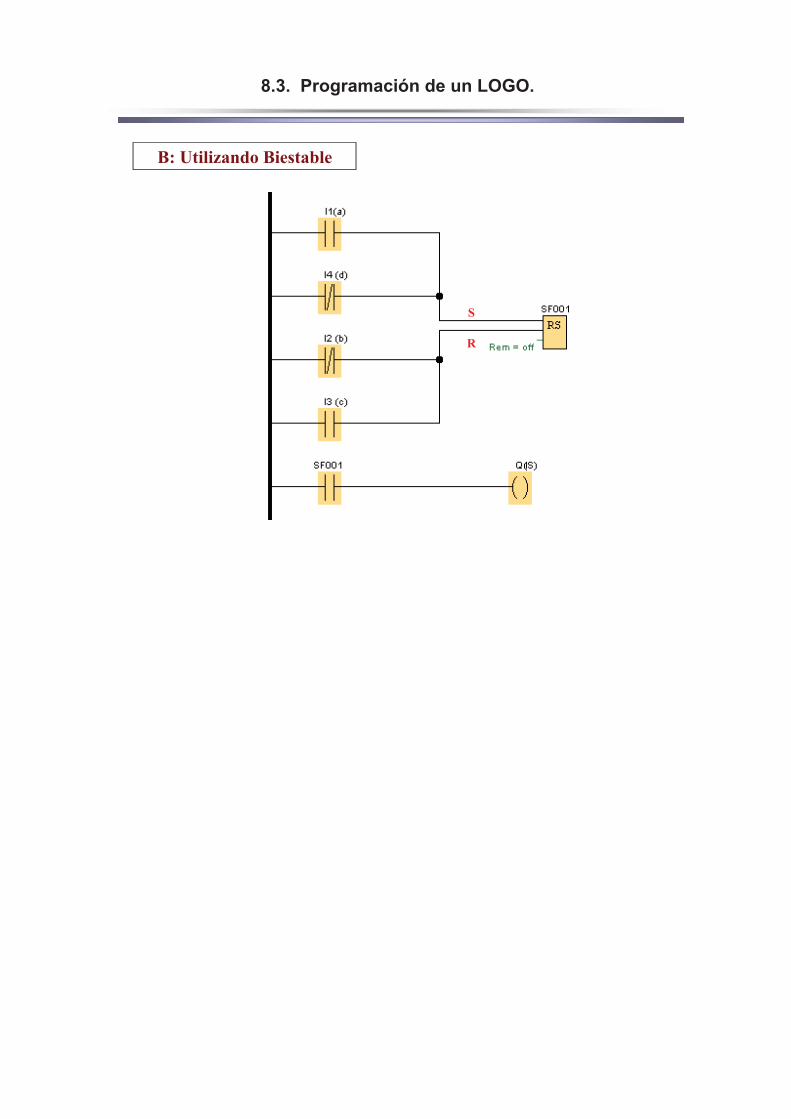
8.3. Programación de un LOGO.
Bloque I: Introducción a los automatismos
Toda máquina o conjunto de máquinas, que evolucionanrespetando unas condiciones de funcionamiento prefijadas,con la mínima intervención humana posible.
1) Encargarse de trabajos repetitivos, peligrosos y penosos.2) Controlar la seguridad del personal e instalaciones.3) Incrementar la producción y productividad.4) Disminuir el consumo de materia y energía.
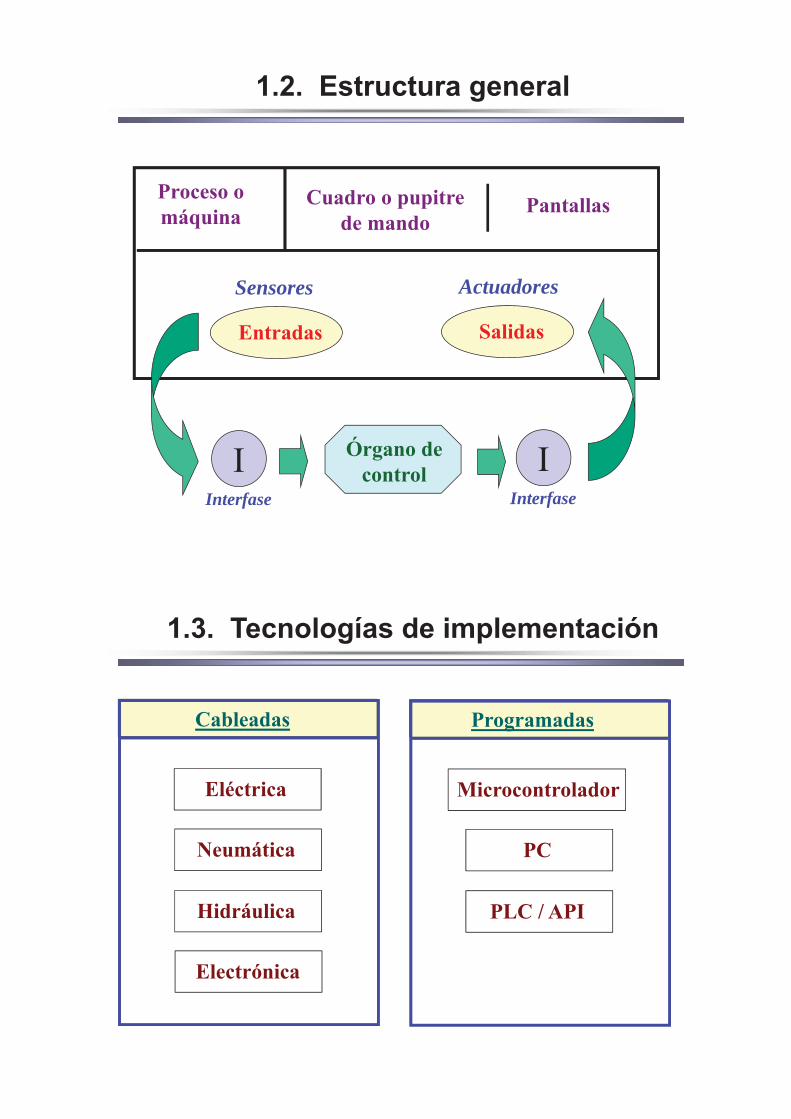
Sensores Actuadores
Interfase Interfase
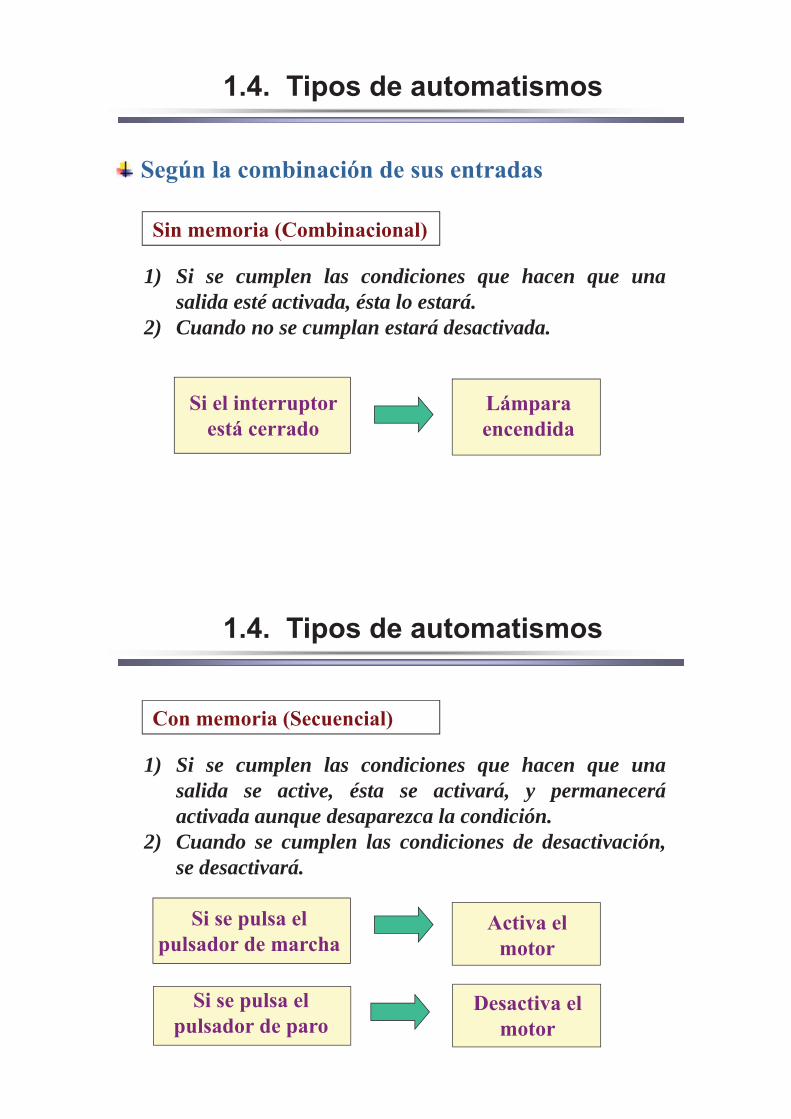
1) Si se cumplen las condiciones que hacen que unasalida esté activada, ésta lo estará.
2) Cuando no se cumplan estará desactivada.
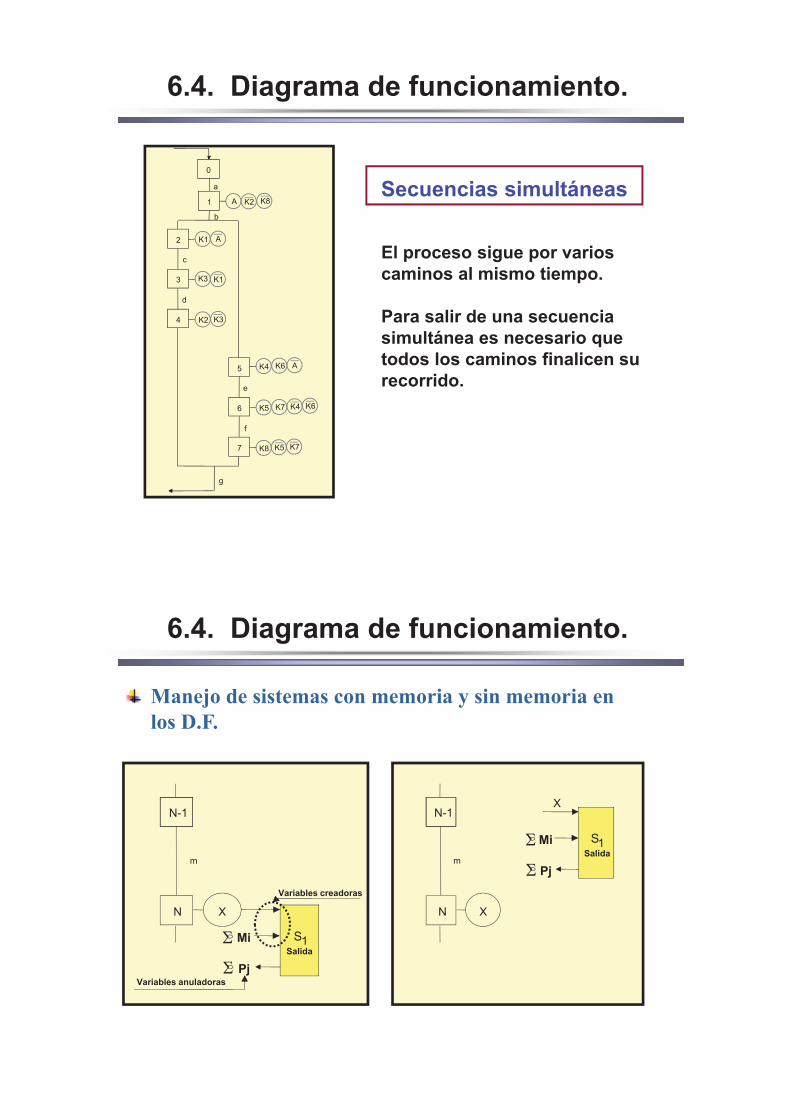
1) Si se cumplen las condiciones que hacen que unasalida se active, ésta se activará, y permaneceráactivada aunque desaparezca la condición.
2) Cuando se cumplen las condiciones de desactivación,se desactivará.
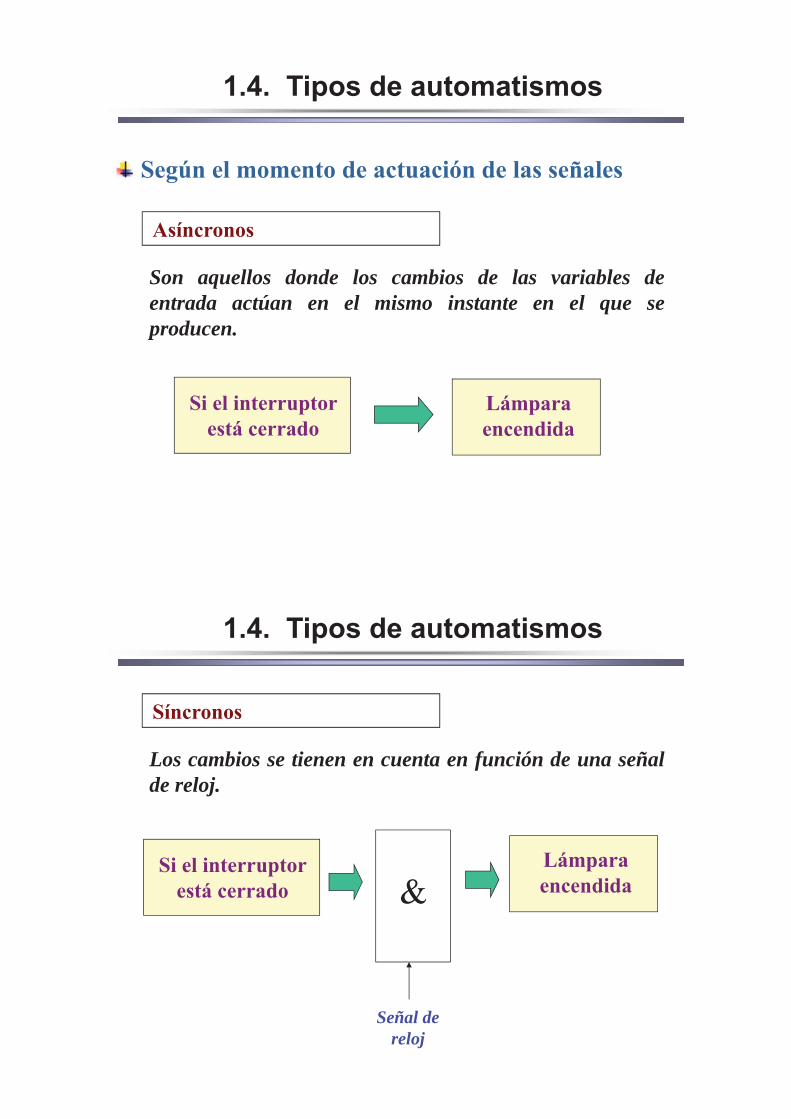
Son aquellos donde los cambios de las variables deentrada actúan en el mismo instante en el que seproducen.
Los cambios se tienen en cuenta en función de una señalde reloj.
Señal de reloj
Bloque I: Introducción a los automatismos
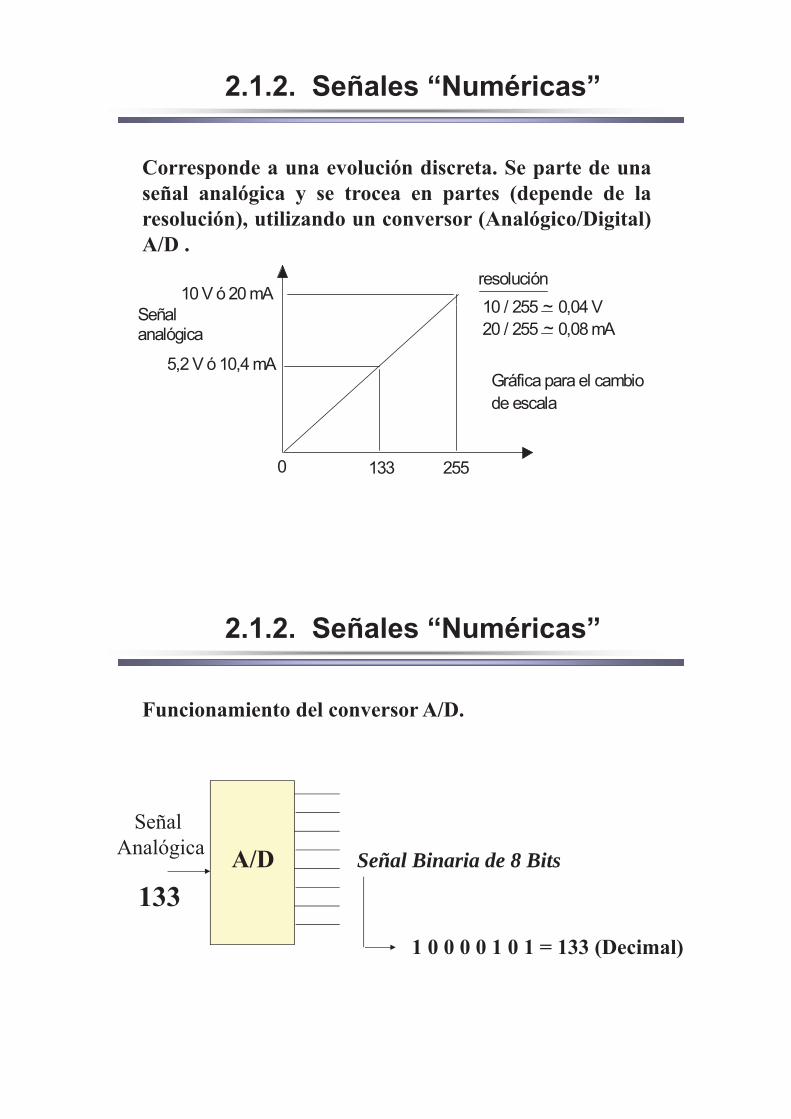
Señal Binaria de 8 Bits
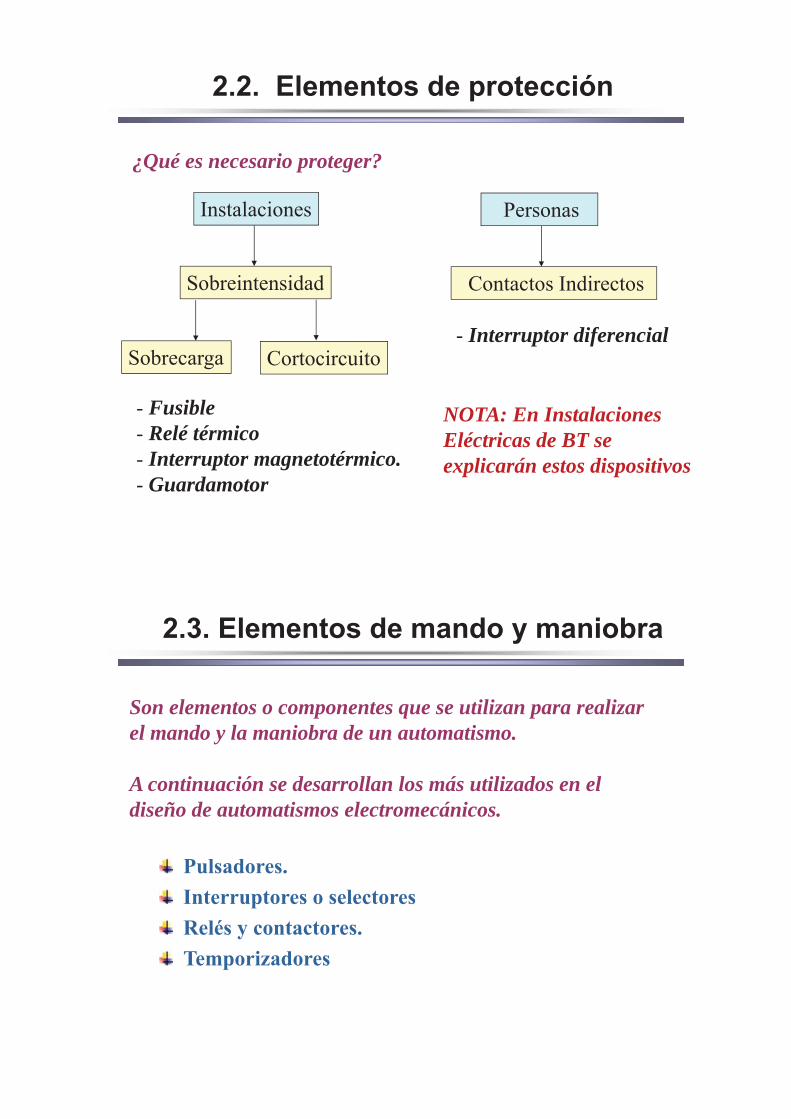
¿Qué es necesario proteger?
FusibleRelé térmico Interruptor magnetotérmico.Guardamotor
Interruptor diferencial
NOTA: En Instalaciones Eléctricas de BT se explicarán estos dispositivos
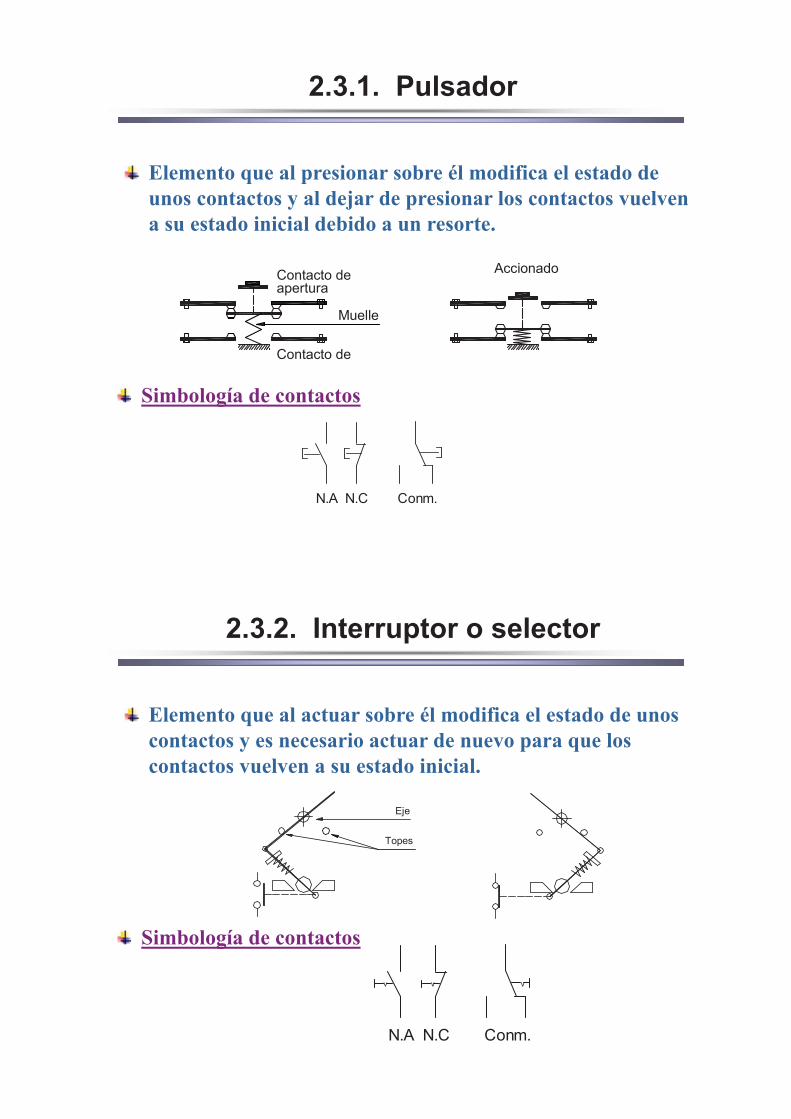
Son elementos o componentes que se utilizan para realizar el mando y la maniobra de un automatismo.
A continuación se desarrollan los más utilizados en el diseño de automatismos electromecánicos.
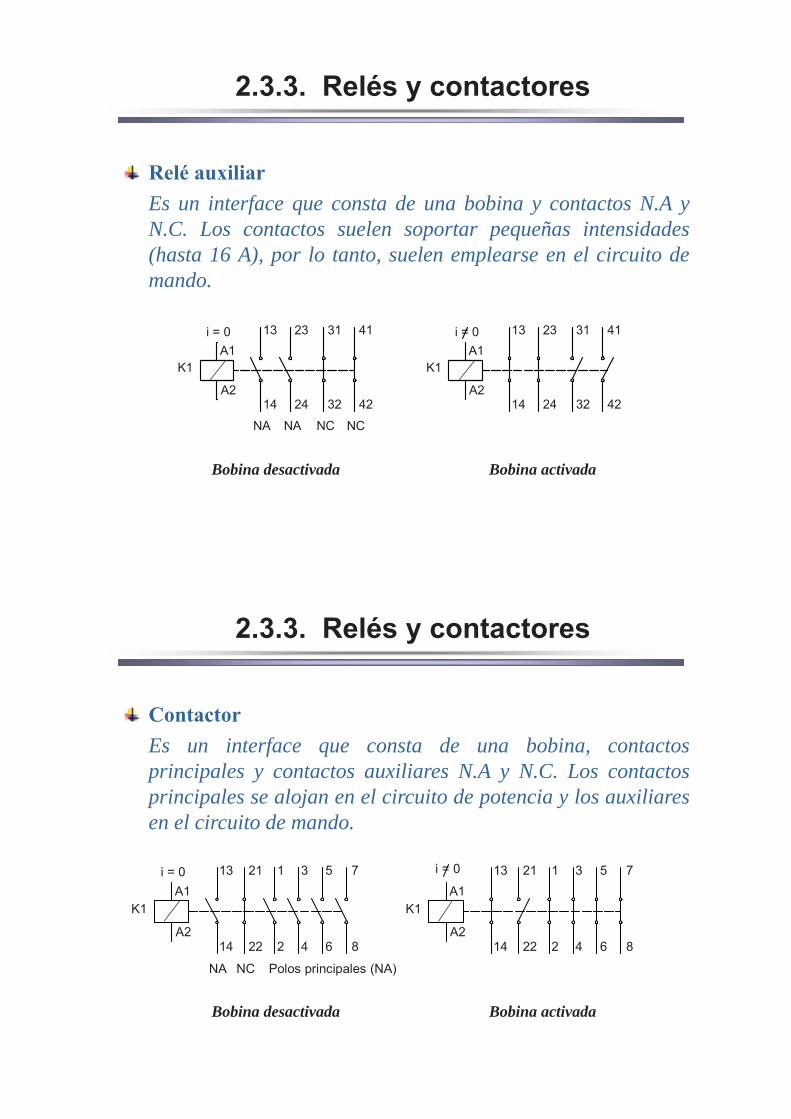
Es un interface que consta de una bobina y contactos N.A yN.C. Los contactos suelen soportar pequeñas intensidades(hasta 16 A), por lo tanto, suelen emplearse en el circuito demando.
Bobina desactivada Bobina activada
Es un interface que consta de una bobina, contactosprincipales y contactos auxiliares N.A y N.C. Los contactosprincipales se alojan en el circuito de potencia y los auxiliaresen el circuito de mando.
Bobina desactivada Bobina activada
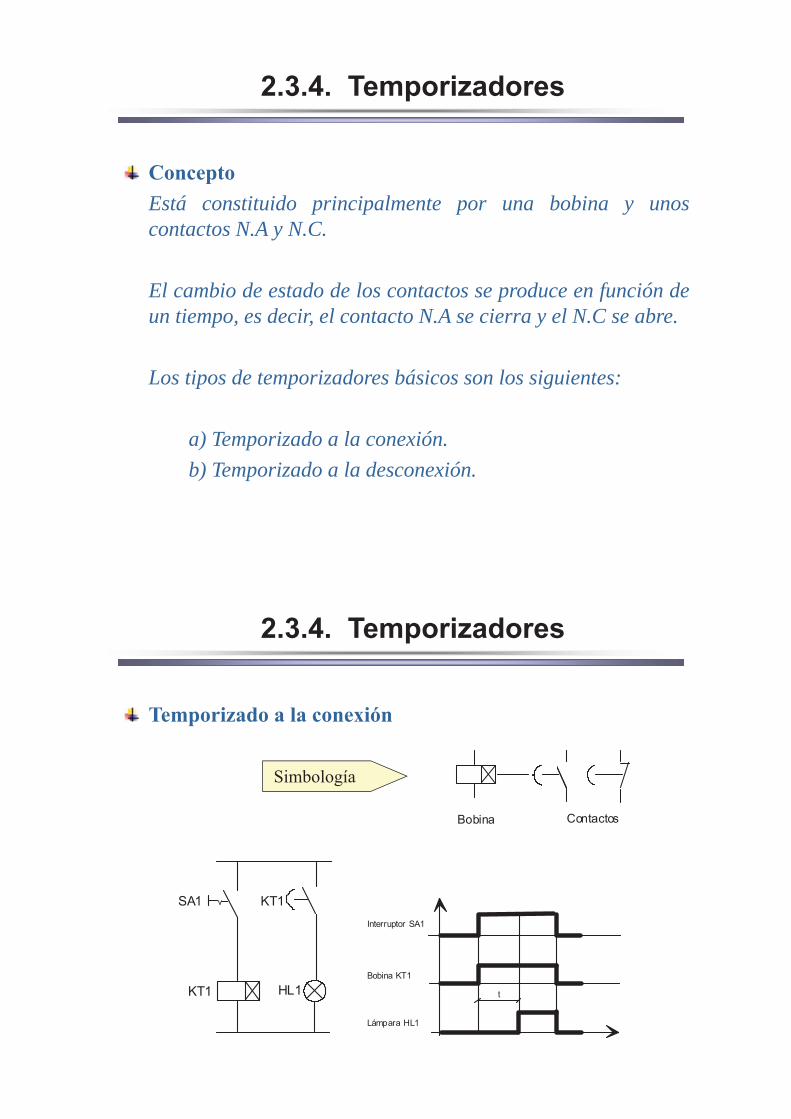
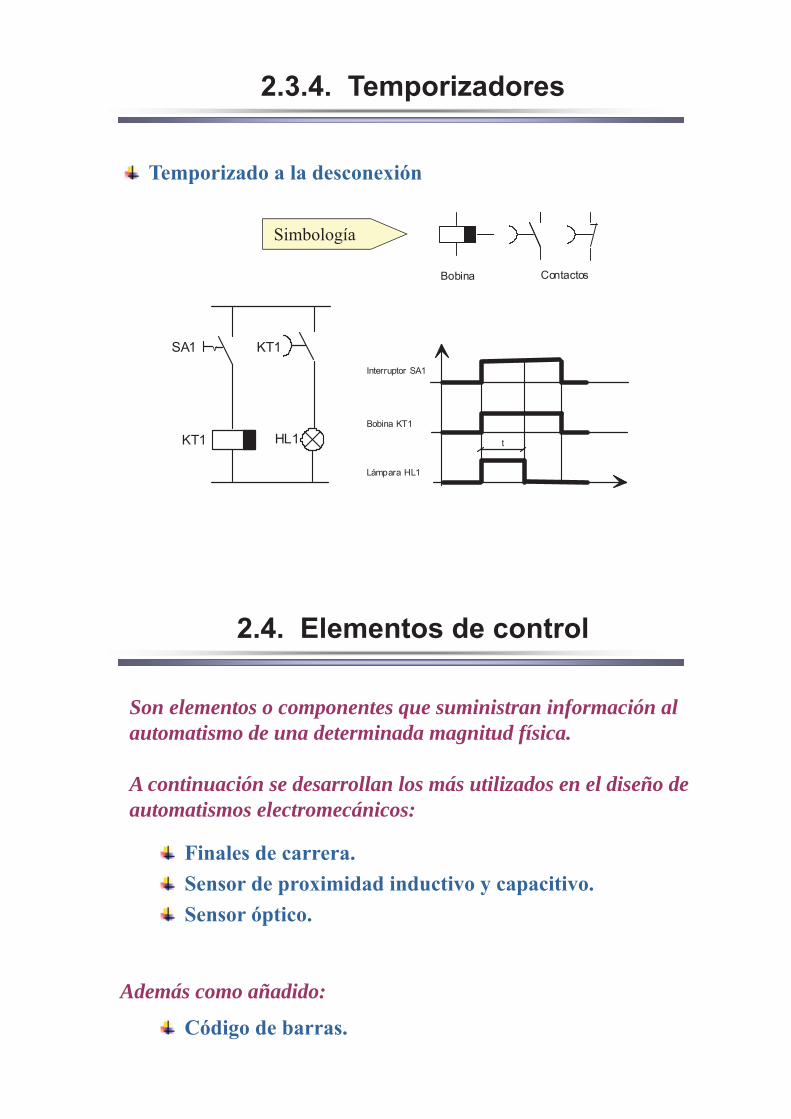
Está constituido principalmente por una bobina y unoscontactos N.A y N.C.
El cambio de estado de los contactos se produce en función deun tiempo, es decir, el contacto N.A se cierra y el N.C se abre.
Los tipos de temporizadores básicos son los siguientes:
a) Temporizado a la conexión.b) Temporizado a la desconexión.
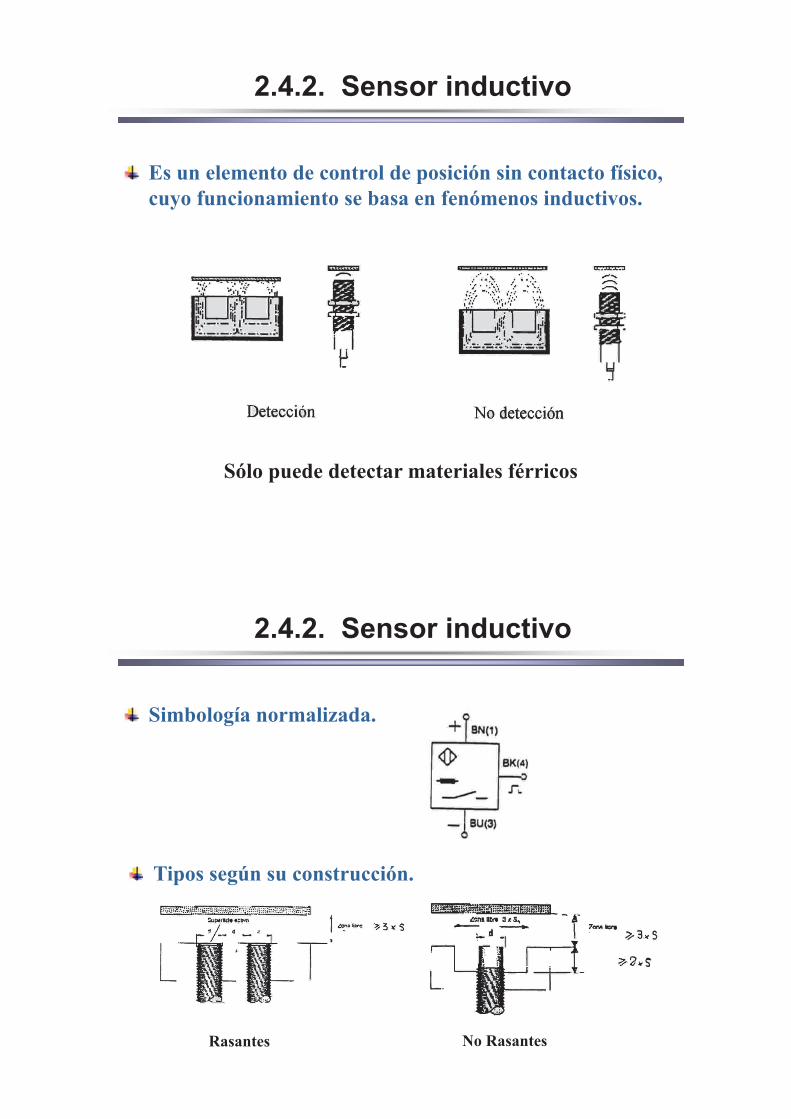
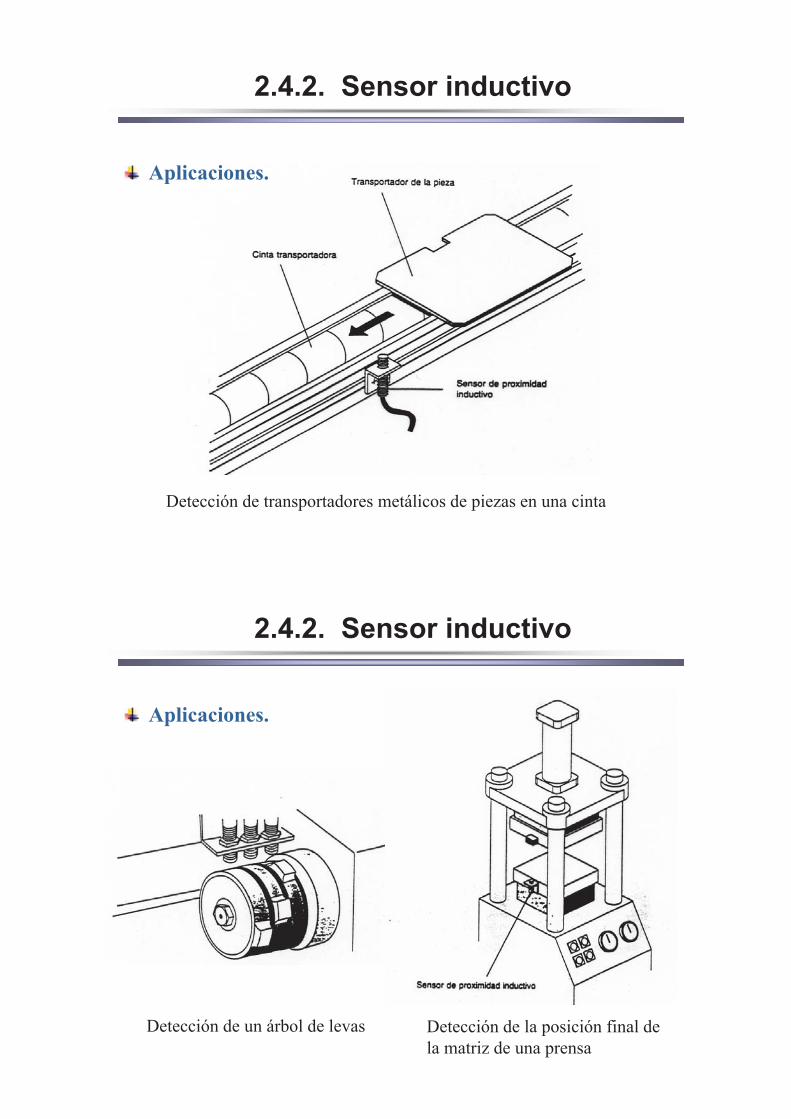
Son elementos o componentes que suministran información al automatismo de una determinada magnitud física.
A continuación se desarrollan los más utilizados en el diseño de automatismos electromecánicos:
Además como añadido:
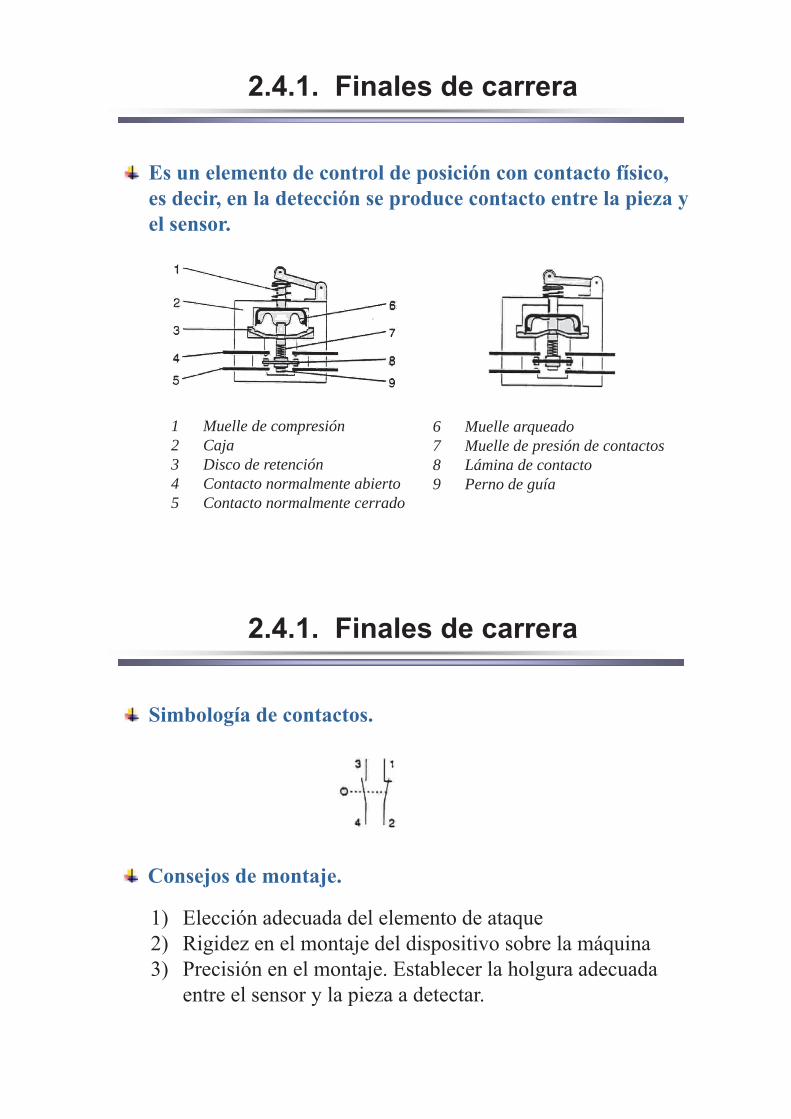
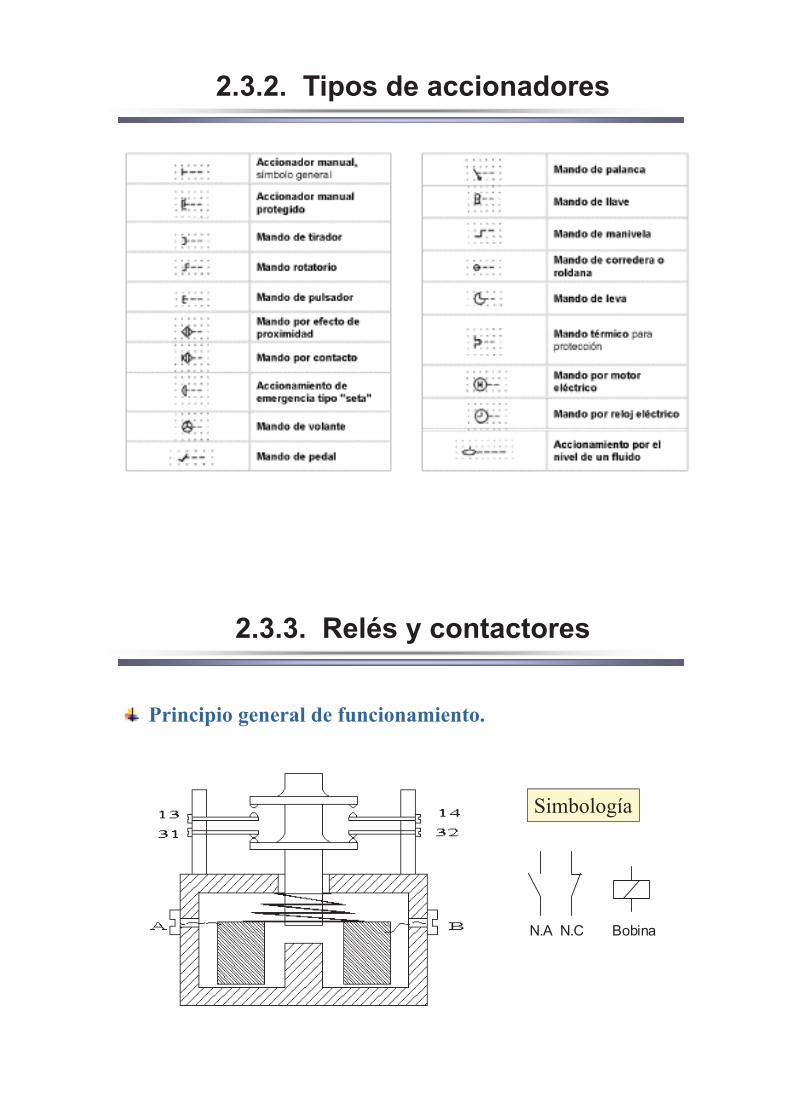
1 Muelle de compresión2 Caja3 Disco de retención4 Contacto normalmente abierto5 Contacto normalmente cerrado
6 Muelle arqueado7 Muelle de presión de contactos8 Lámina de contacto9 Perno de guía
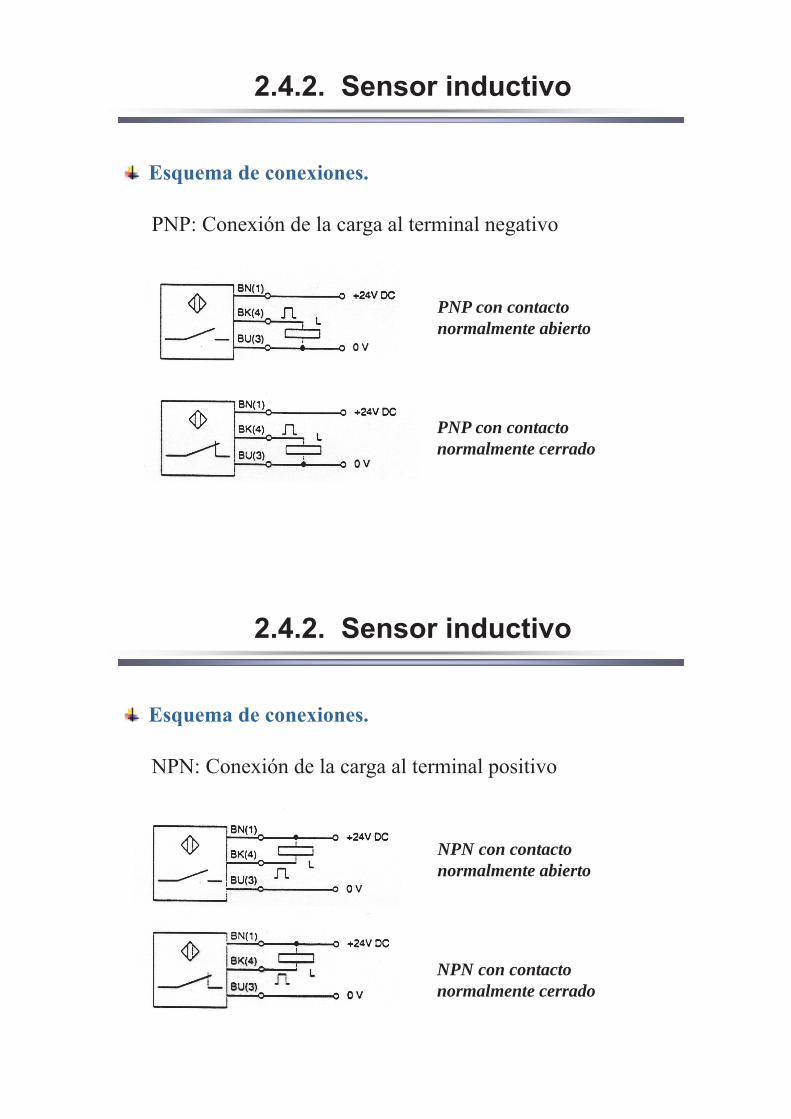
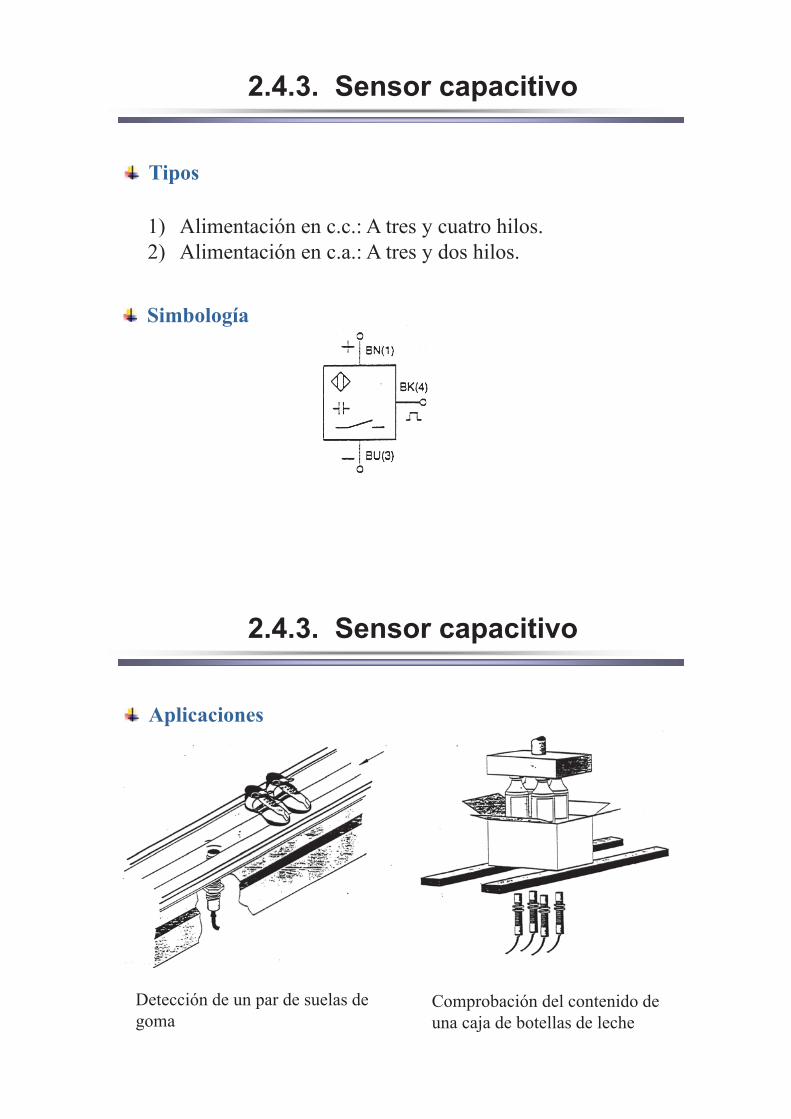
PNP con contacto normalmente abierto
PNP con contacto normalmente cerrado
NPN con contacto normalmente abierto
NPN con contacto normalmente cerrado
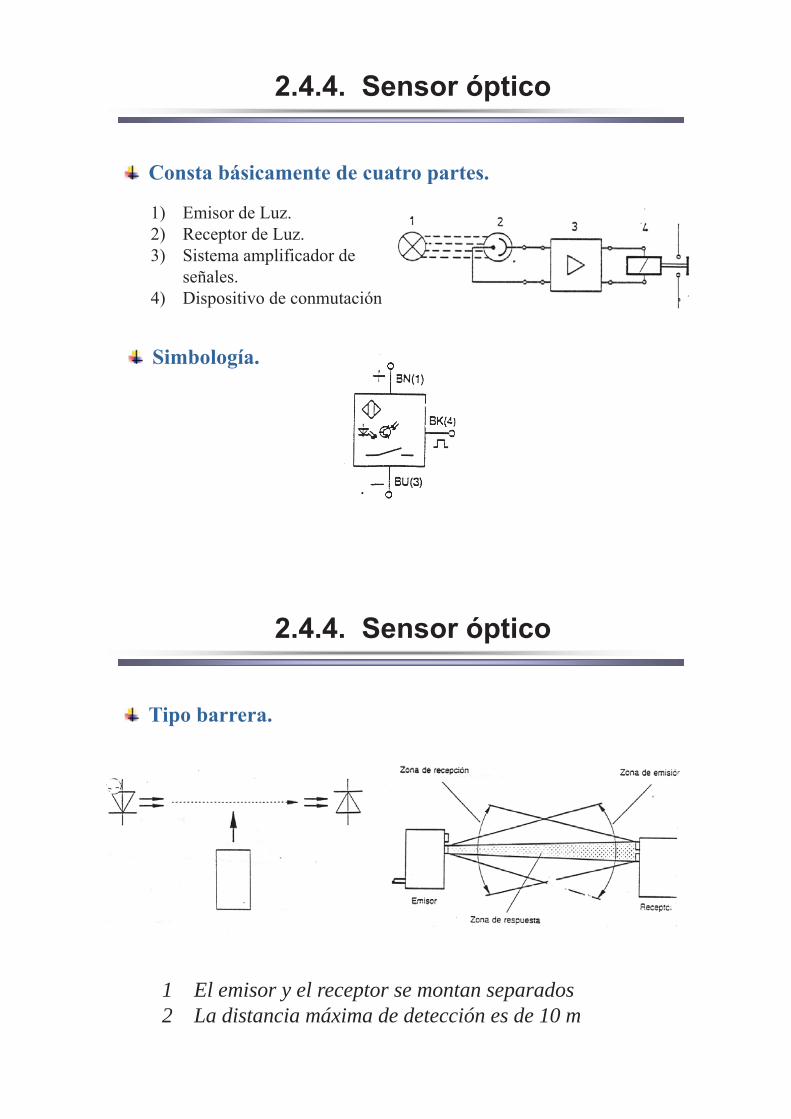
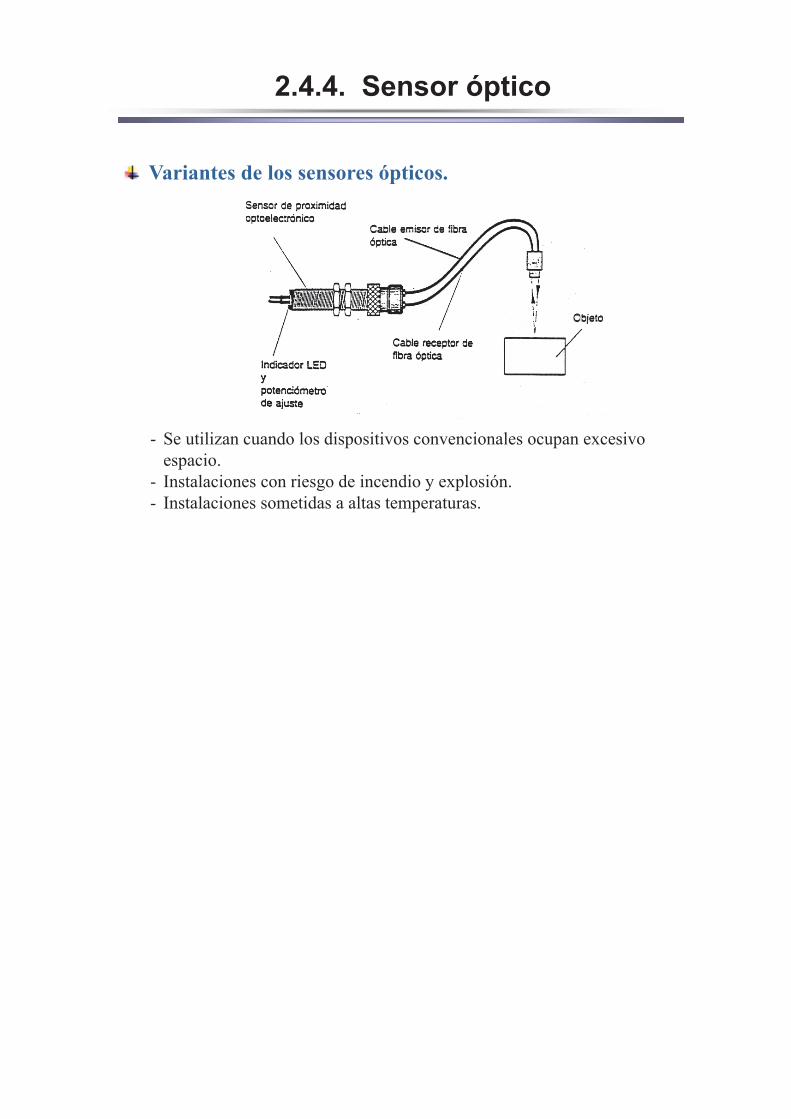
1 El emisor y el receptor se montan separados2 La distancia máxima de detección es de 10 m
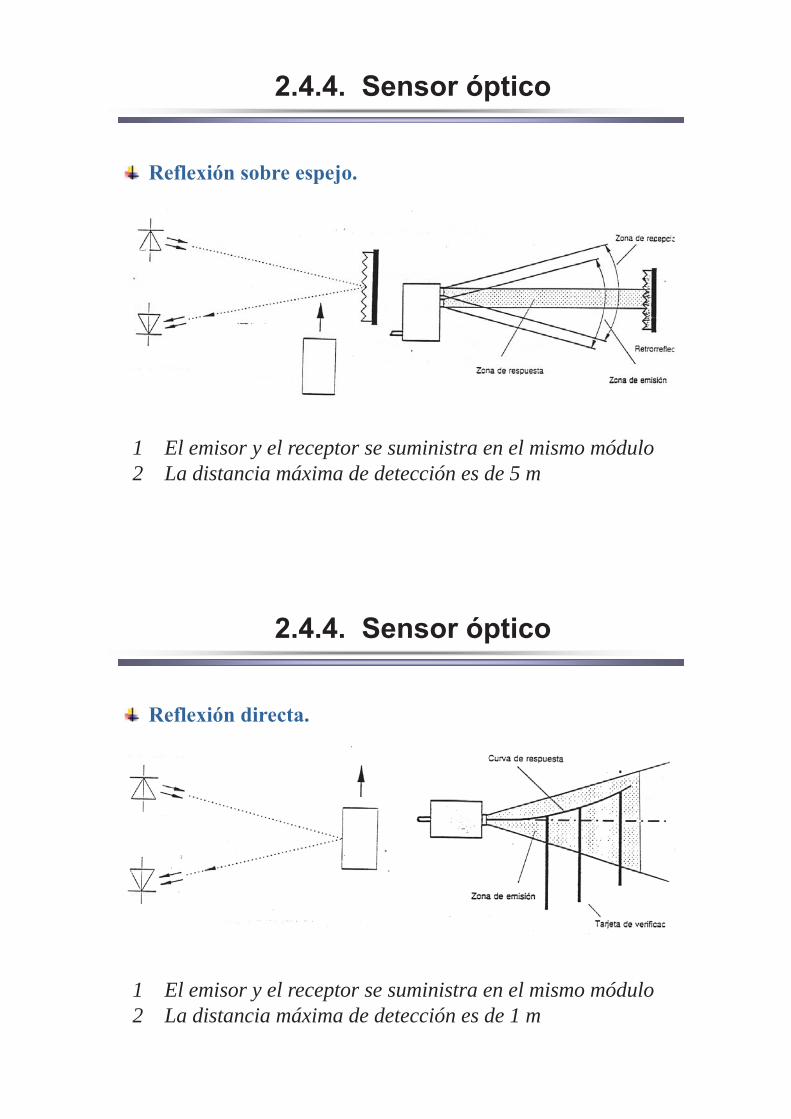
1 El emisor y el receptor se suministra en el mismo módulo2 La distancia máxima de detección es de 5 m
1 El emisor y el receptor se suministra en el mismo módulo2 La distancia máxima de detección es de 1 m
Bloque I: Introducción a los automatismos
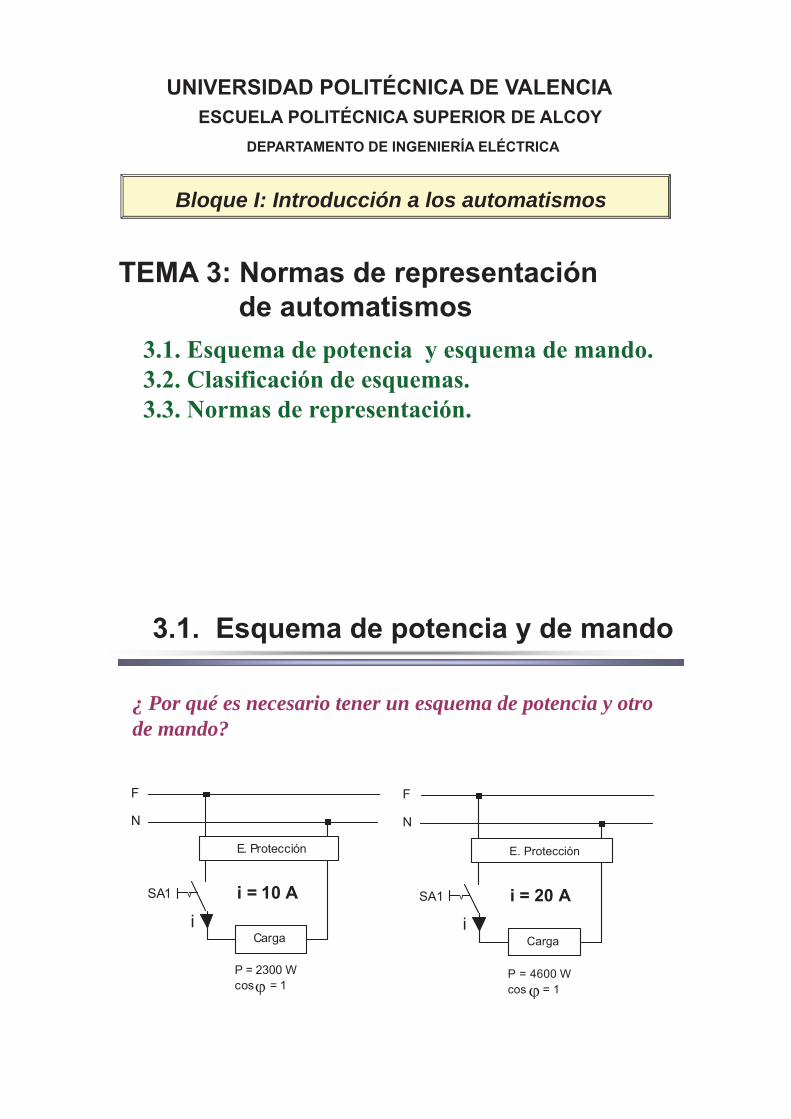
¿ Por qué es necesario tener un esquema de potencia y otro de mando?
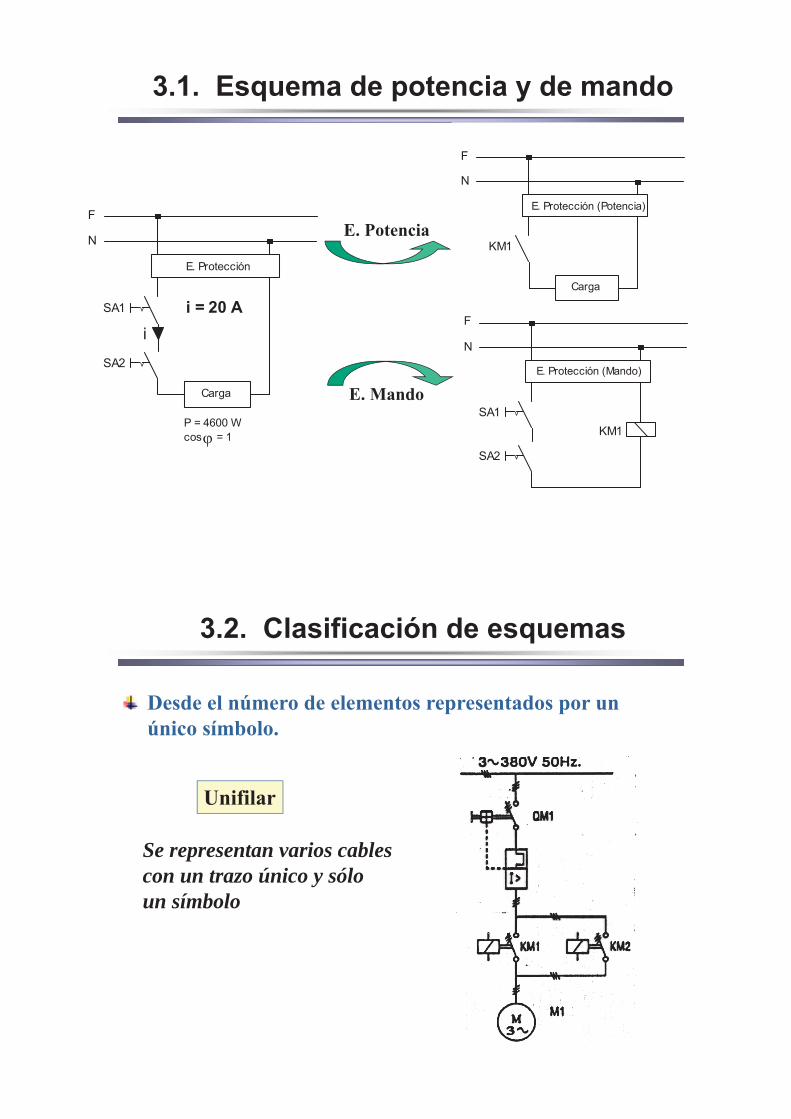
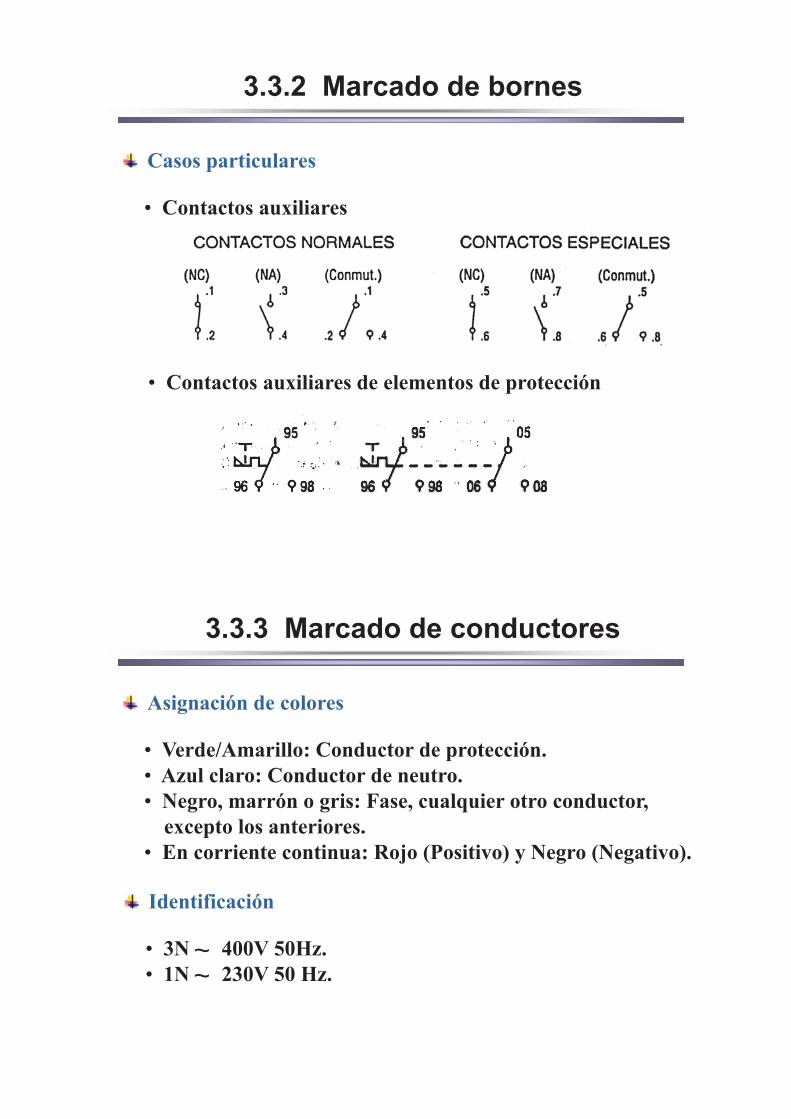
Se representan varios cables con un trazo único y sólo un símbolo
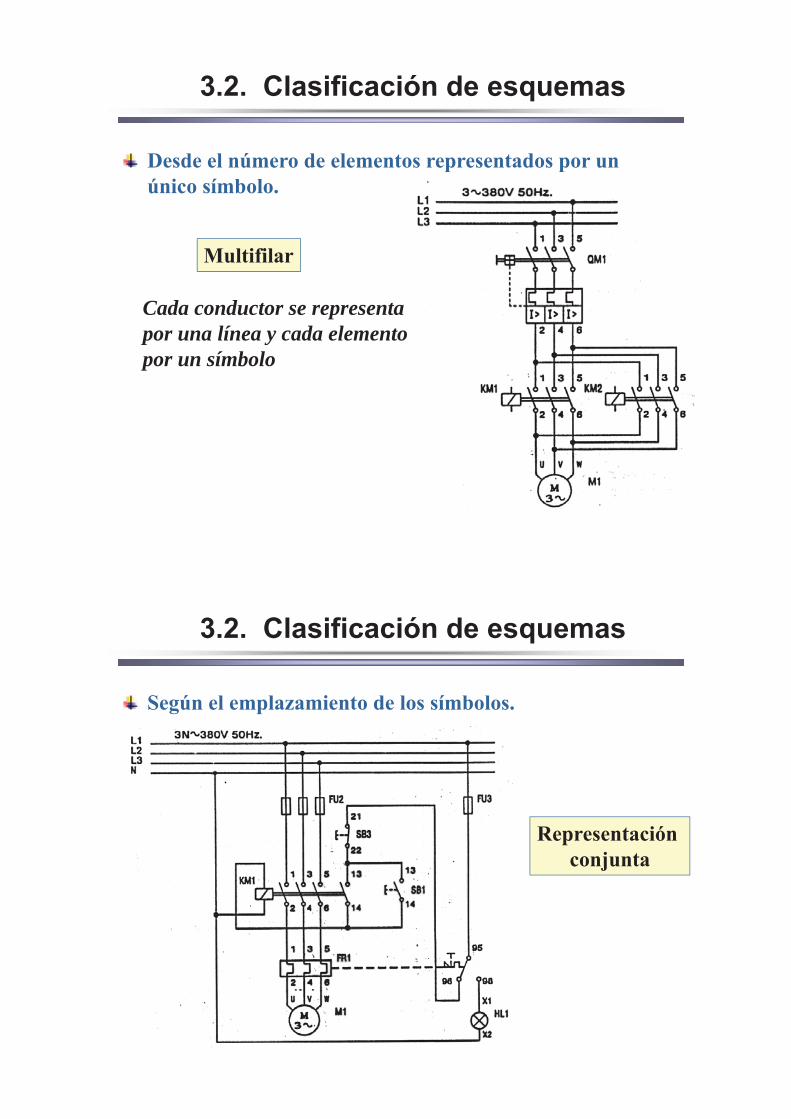
Cada conductor se representa por una línea y cada elemento por un símbolo
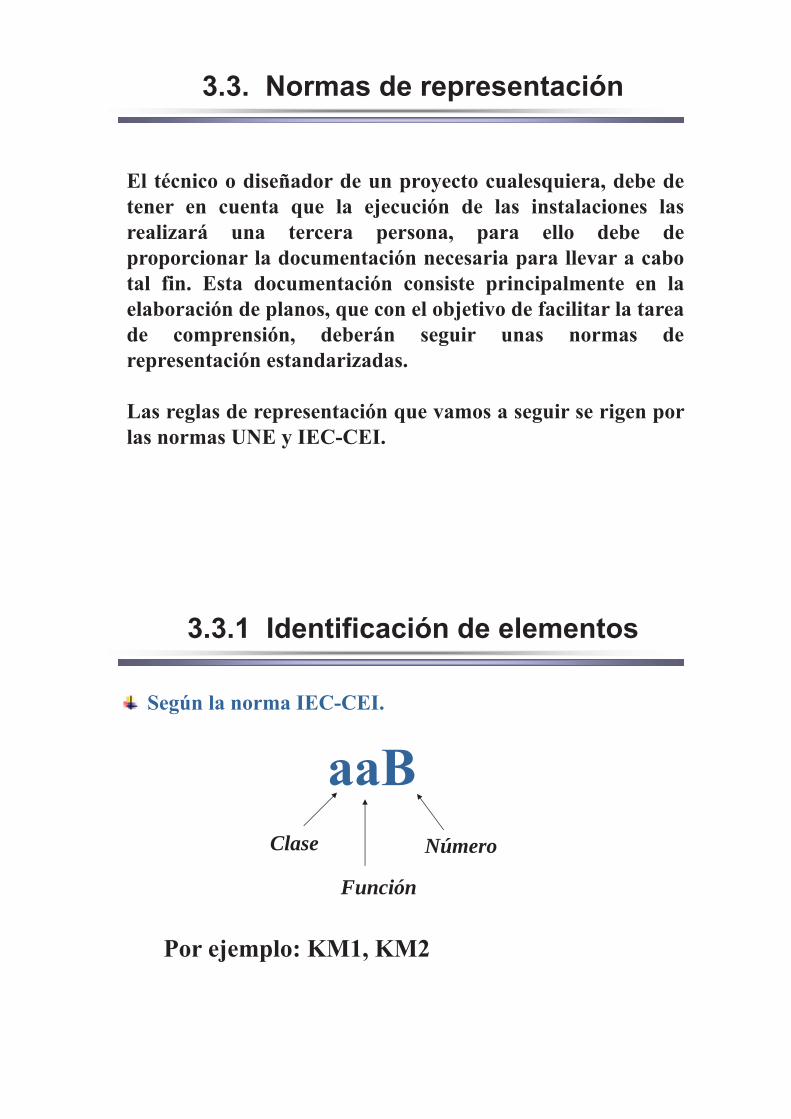
Clase
Función
Número
~~
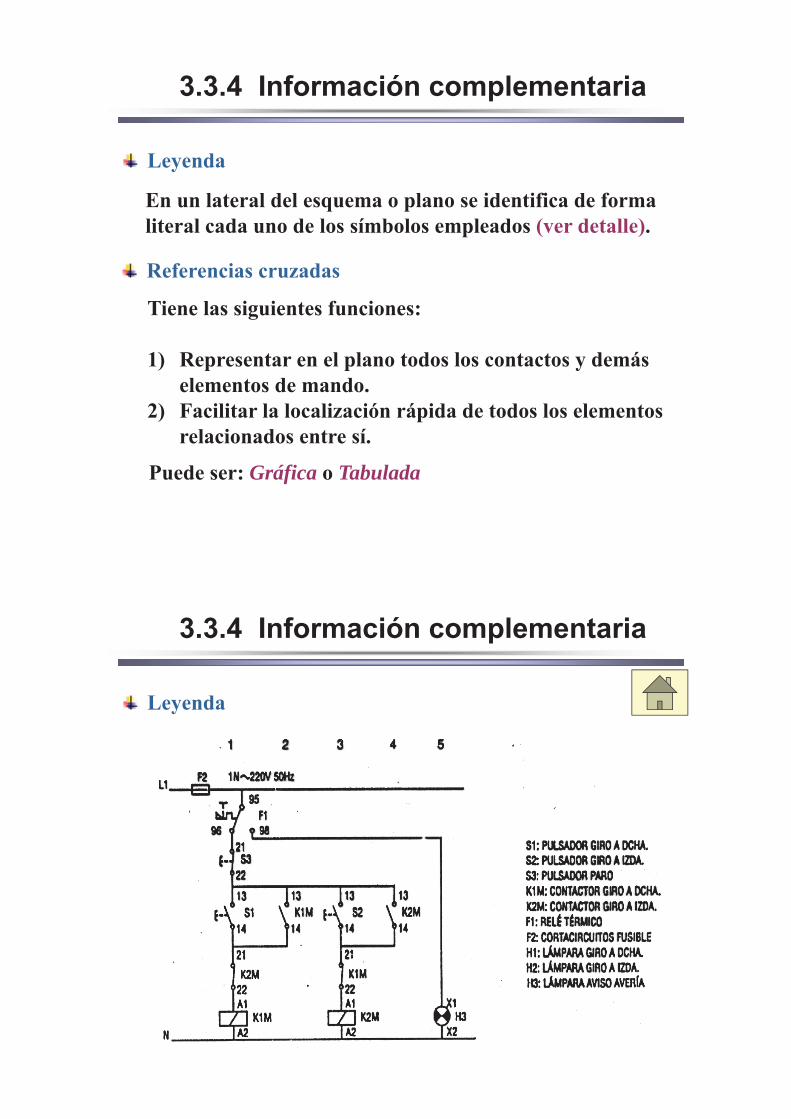
Gráfica Tabulada
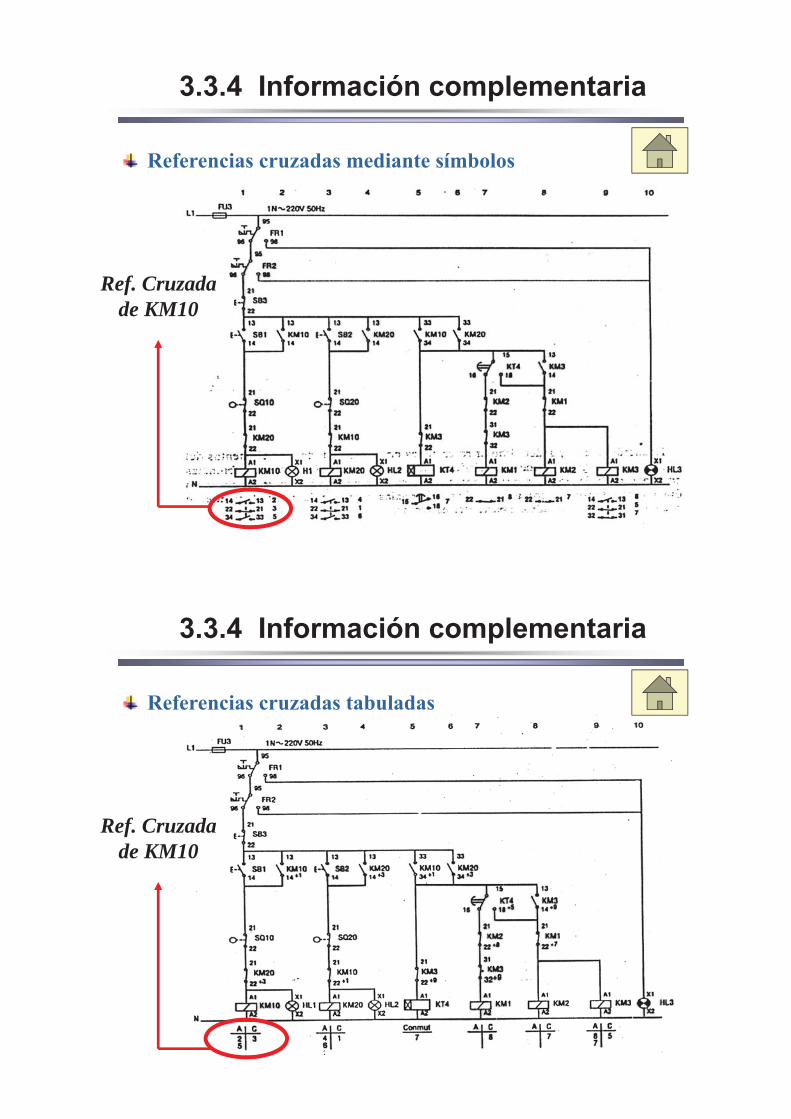
Ref. Cruzadade KM10
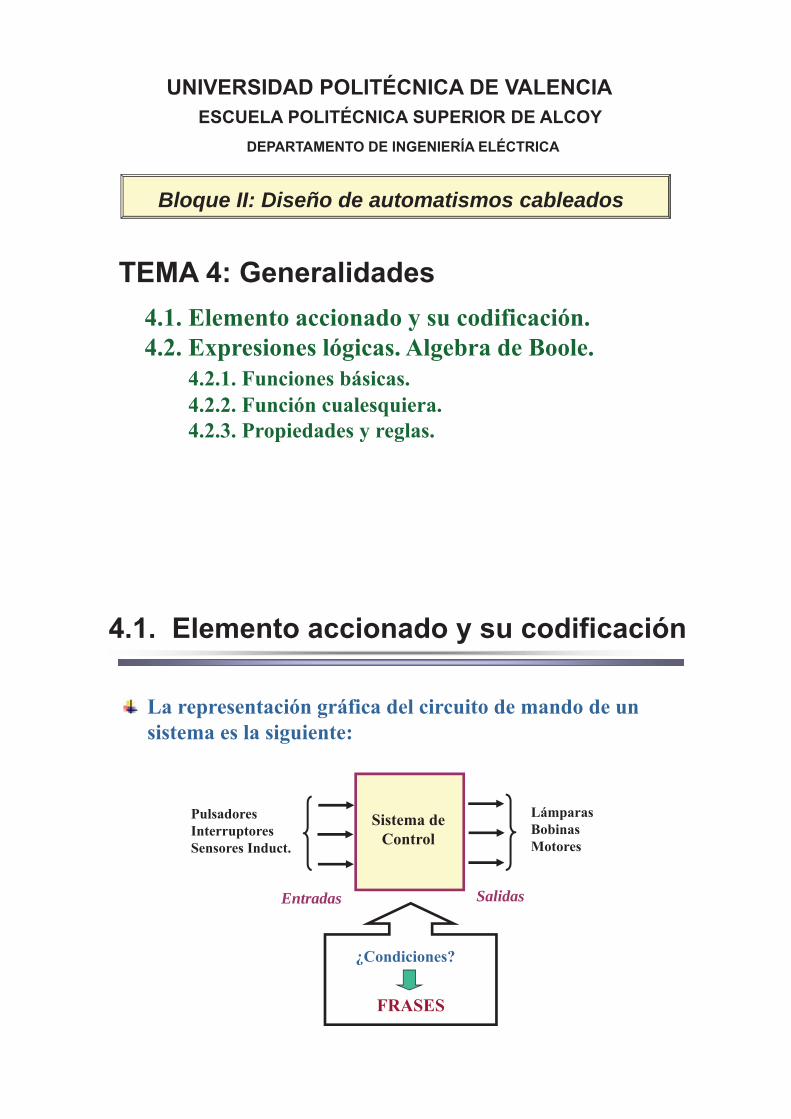
Ref. Cruzadade KM10
Bloque II: Diseño de automatismos cableados
Entradas Salidas
Pulsador de marcha = SB1
Cuando se pulse SB1 SB1
Cuando no se pulse SB1 SB1
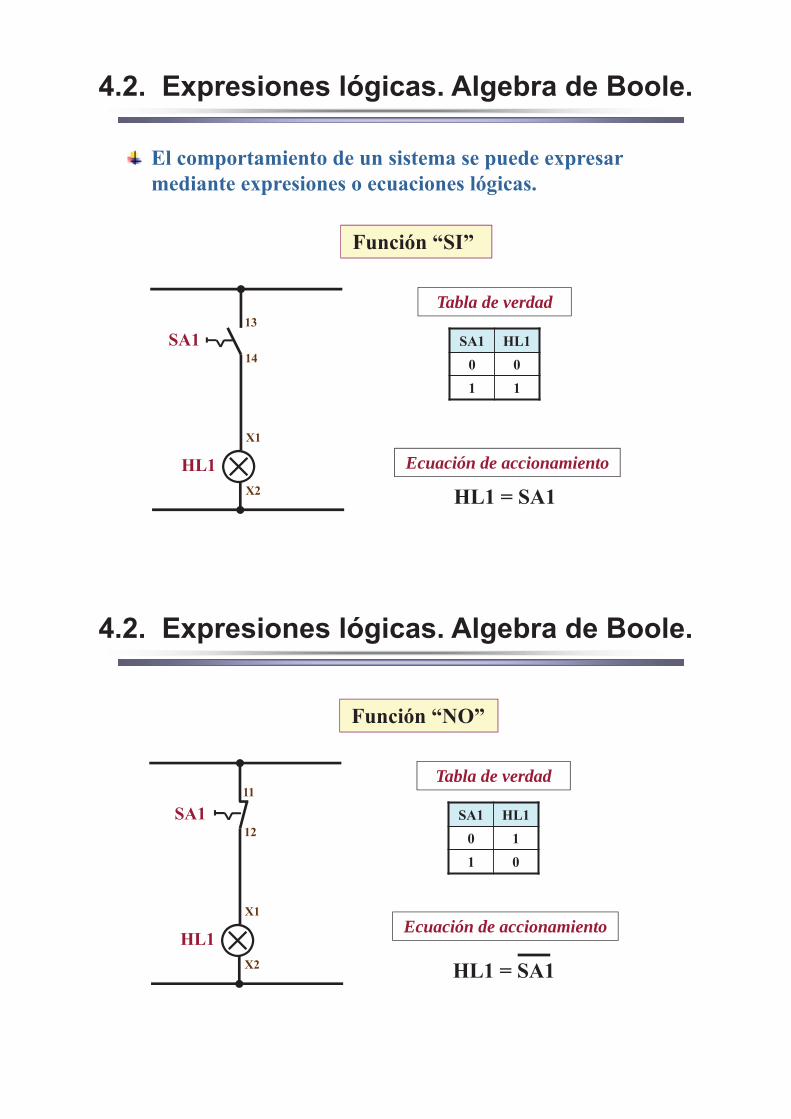
Ecuación de accionamiento
Tabla de verdad
Ecuación de accionamiento
Tabla de verdad
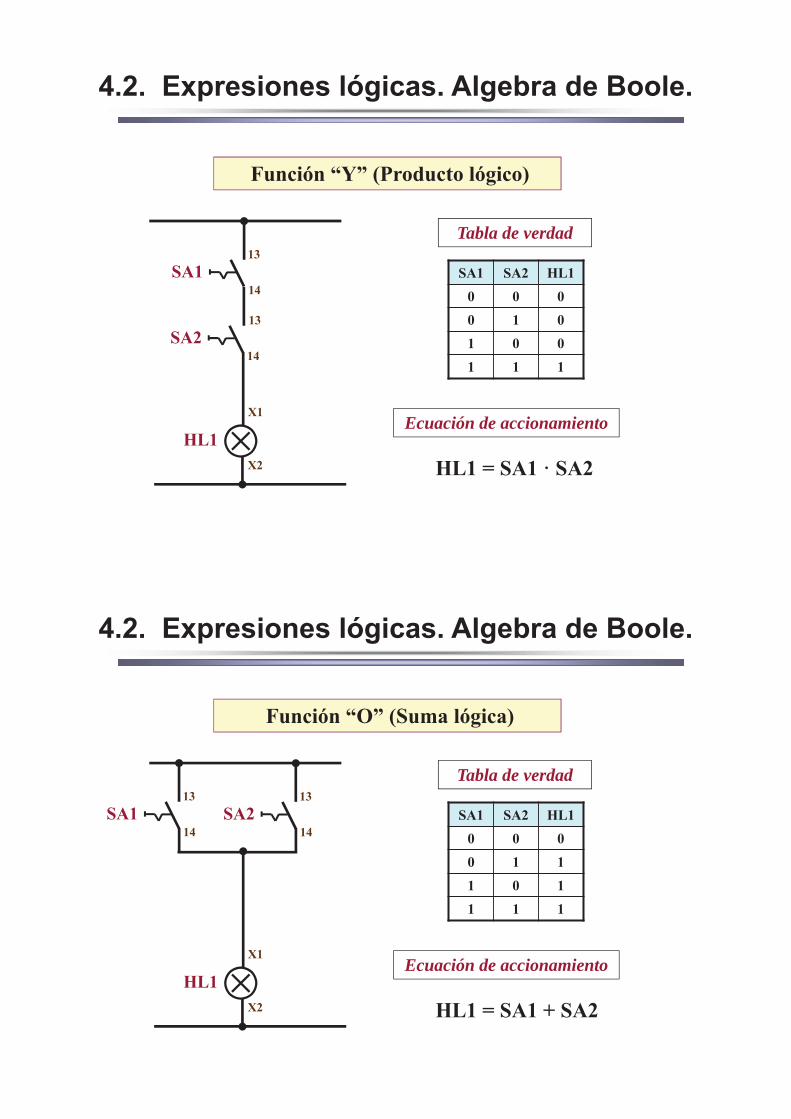
Ecuación de accionamiento
Tabla de verdad
Ecuación de accionamiento
Tabla de verdad
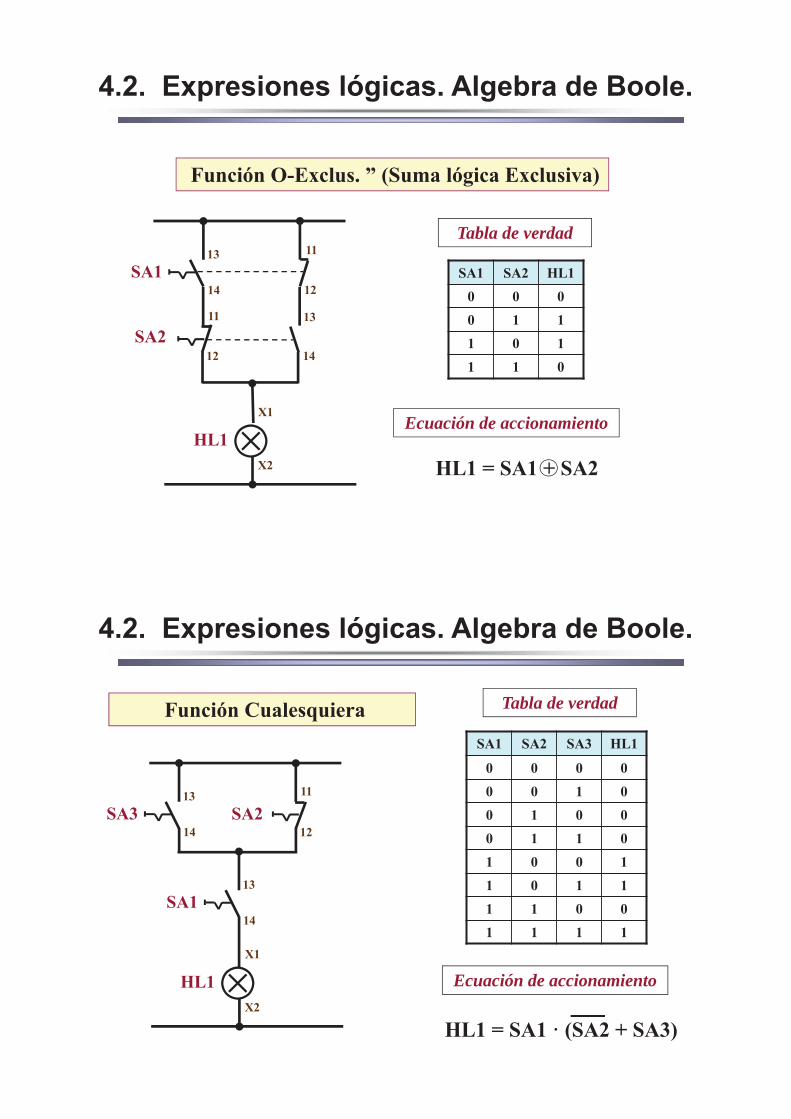
Ecuación de accionamiento
Tabla de verdad
Ecuación de accionamiento
Tabla de verdad
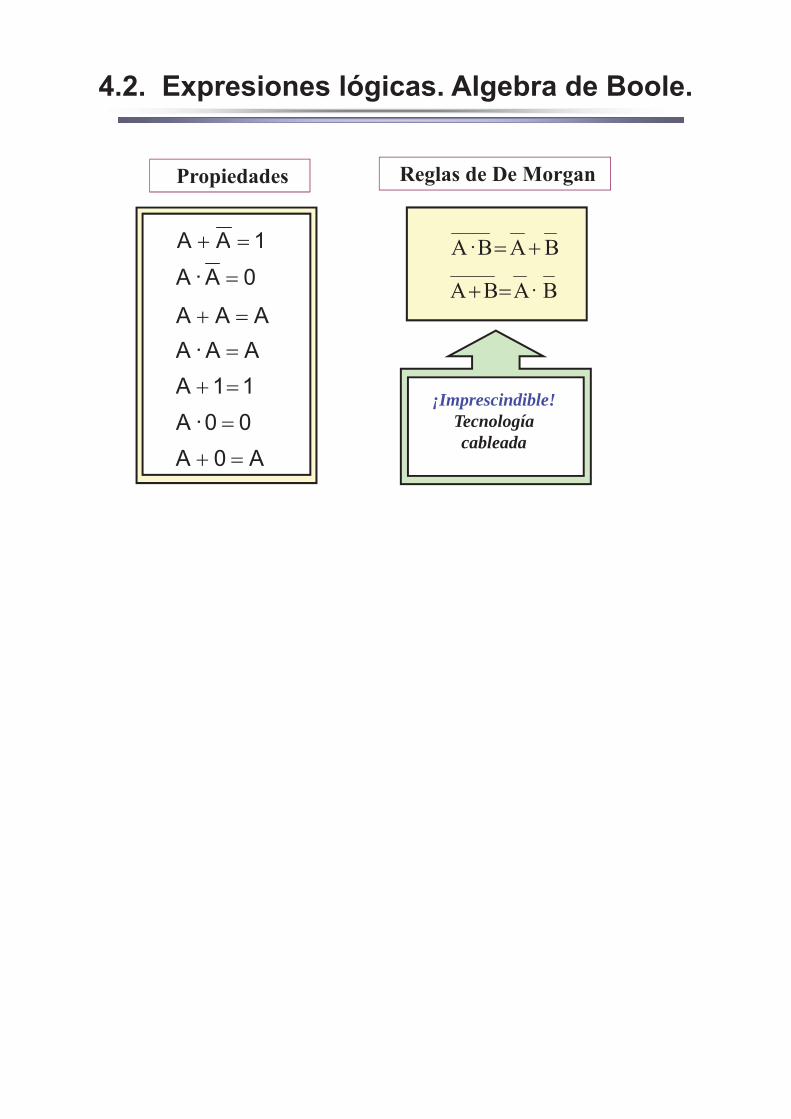
¡Imprescindible!Tecnología cableada
Bloque II: Diseño de automatismos cableados
1) Si se cumplen las condiciones que hacen que unasalida esté activada, ésta lo estará.
2) Cuando no se cumplan estará desactivada.
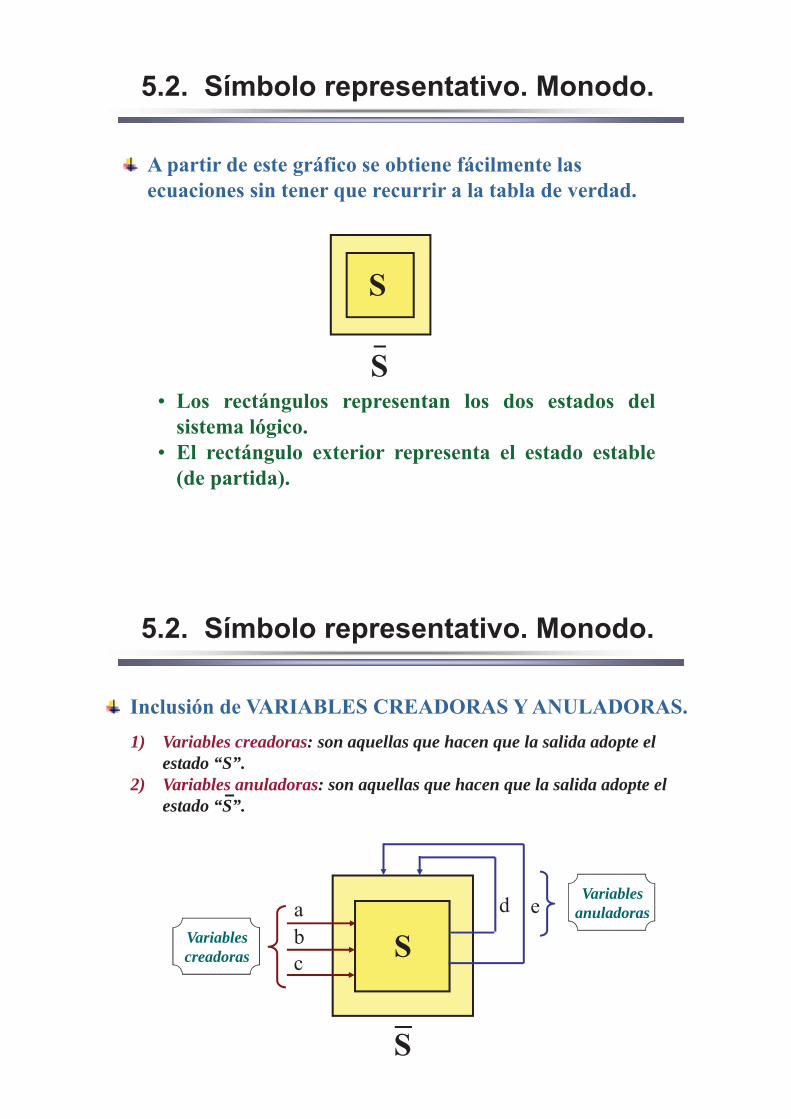
1) Variables creadoras: son aquellas que hacen que la salida adopte el estado “S”.
2) Variables anuladoras: son aquellas que hacen que la salida adopte el estado “S”.
Variables creadoras
Variables anuladoras
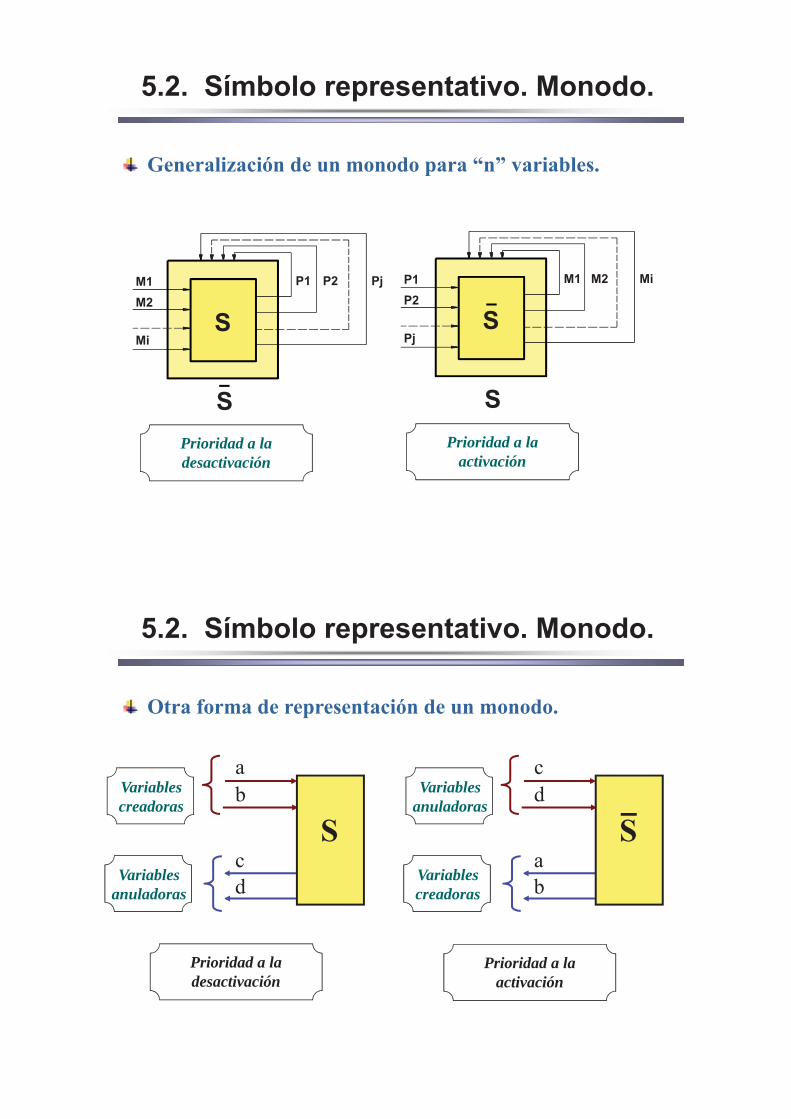
Prioridad a la desactivación
Prioridad a la activación
Prioridad a la desactivación
Prioridad a la activación
Variables creadoras
Variables anuladoras
Variables anuladoras
Variables creadoras
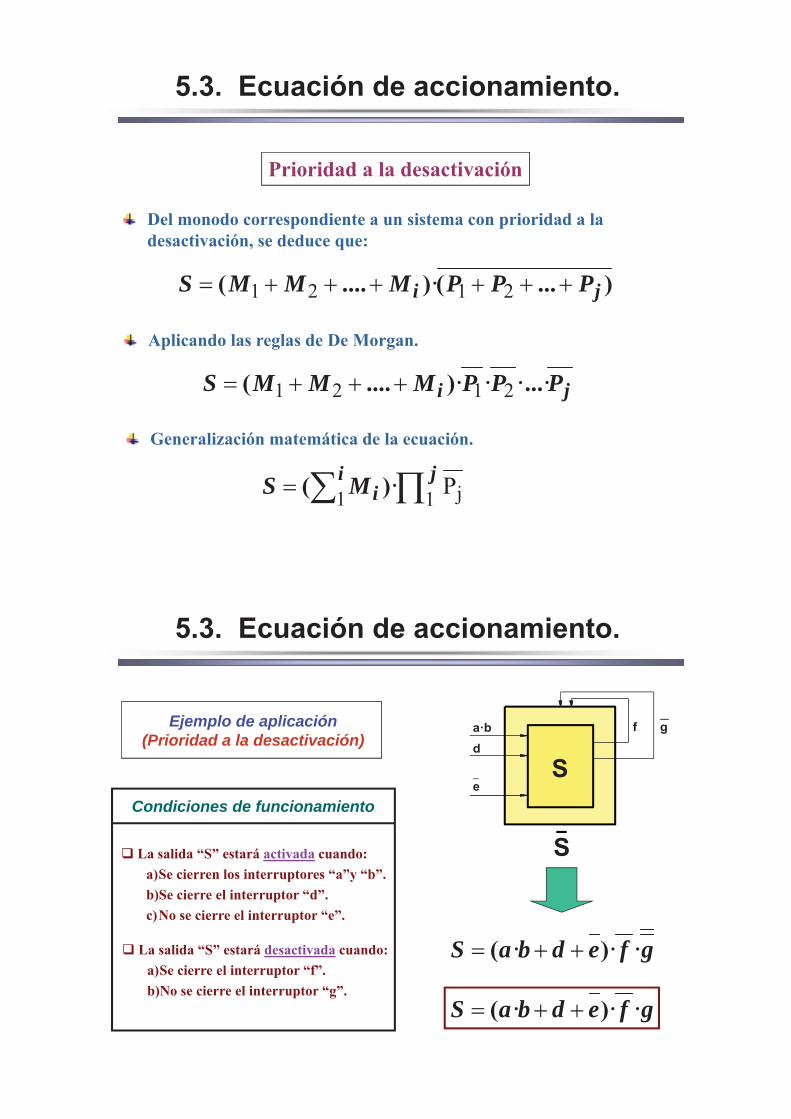
ji PPPMMMS
ji PPPMMMS
jiiMS
Ejemplo de aplicación(Prioridad a la desactivación)
gfedbaS
gfedbaS
Condiciones de funcionamiento
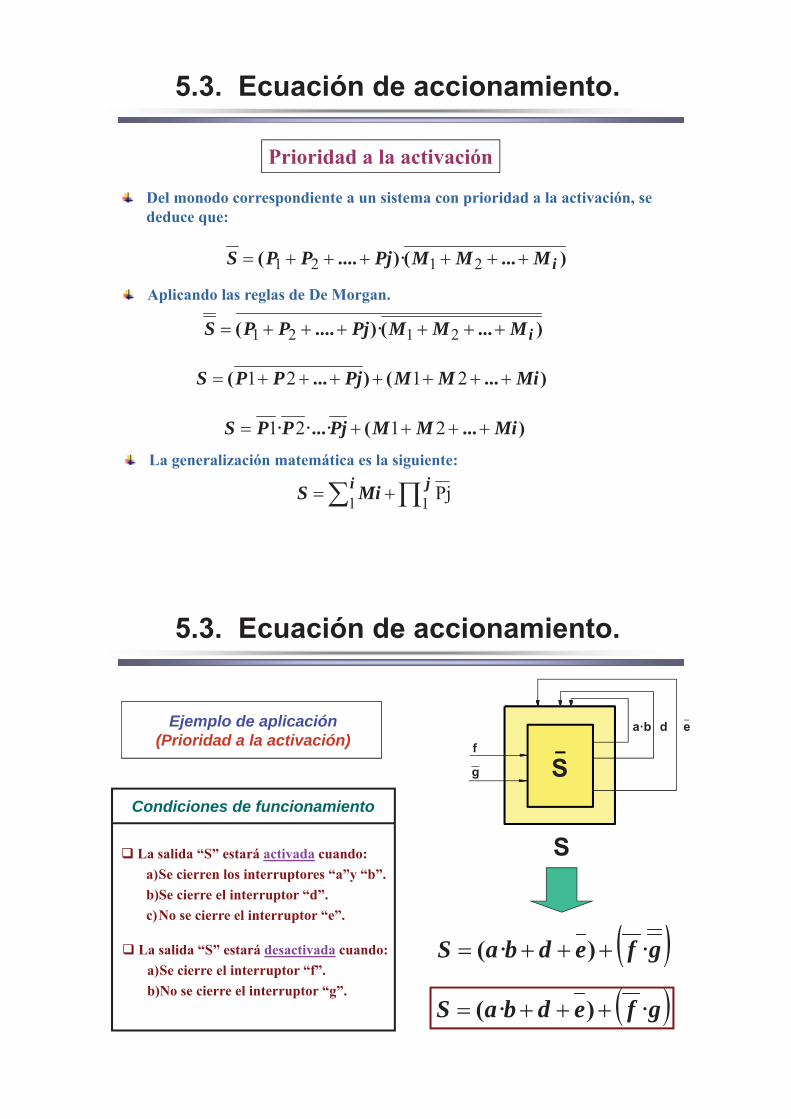
iMMMPjPPS
iMMMPjPPS
MiMMPjPPS
MiMMPjPPS
i jMiS
Ejemplo de aplicación(Prioridad a la activación)
gfedbaS
gfedbaS
Condiciones de funcionamiento
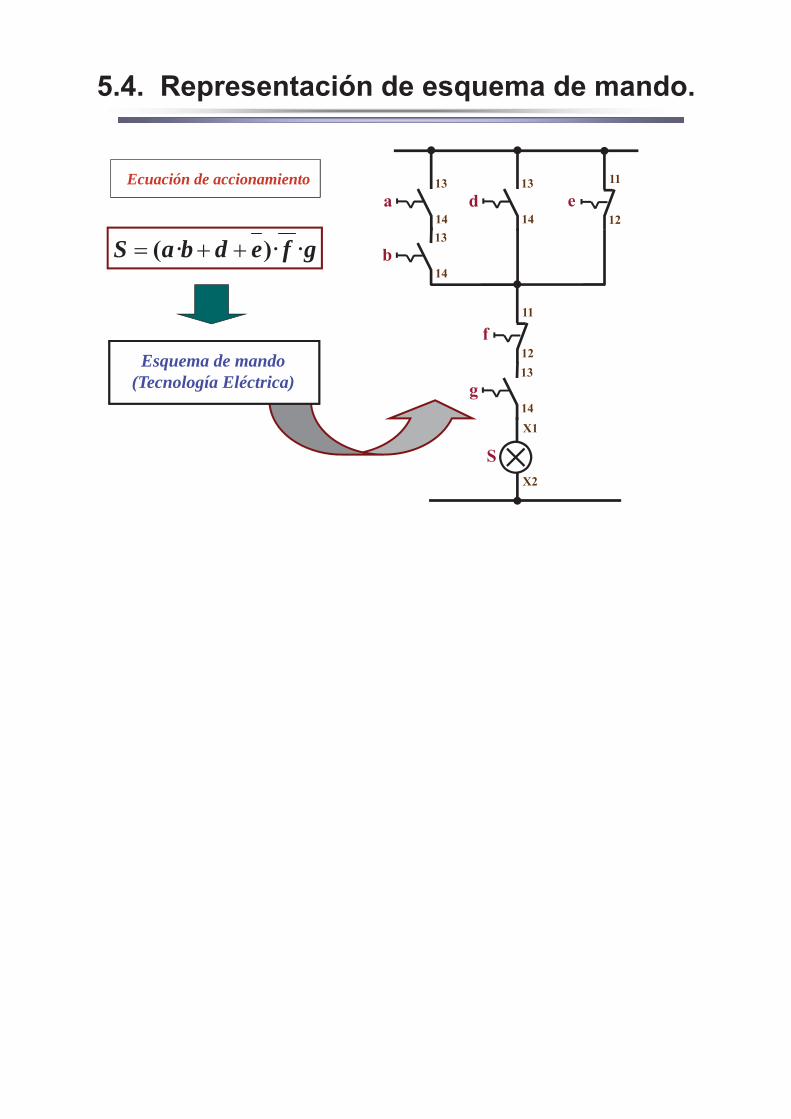
Ecuación de accionamiento
Esquema de mando(Tecnología Eléctrica)
gfedbaS
Bloque II: Diseño de automatismos cableados
1) Si se cumplen las condiciones que hacen que unasalida se active, ésta se activará, y permaneceráactivada aunque desaparezca la condición.
2) Cuando se cumplen las condiciones de desactivación,se desactivará.
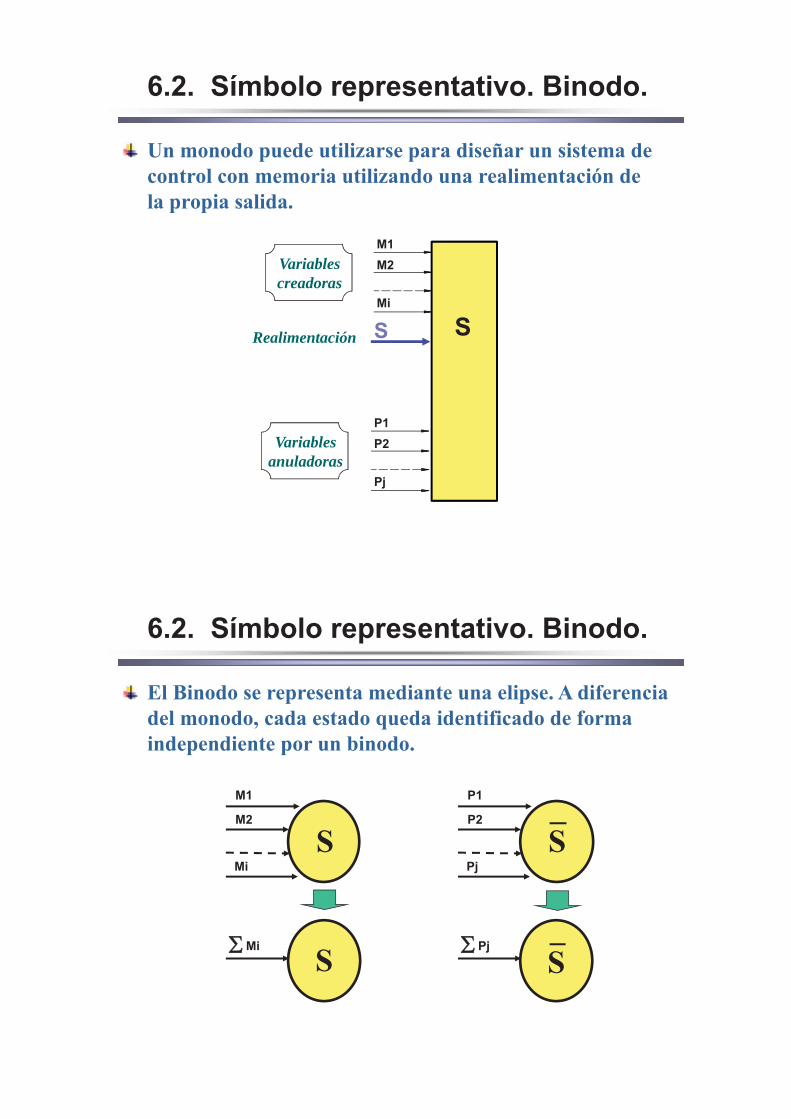
Realimentación
Variables creadoras
Variables anuladoras

jiiMSS Prioridad a la desactivación
iMMMS
iiMS
jPPPS
jjPS
Ecuación de activación Ecuación de desactivación
El tipo de prioridad depende: de la tecnología empleada, del dispositivo utilizado y del diseño realizado
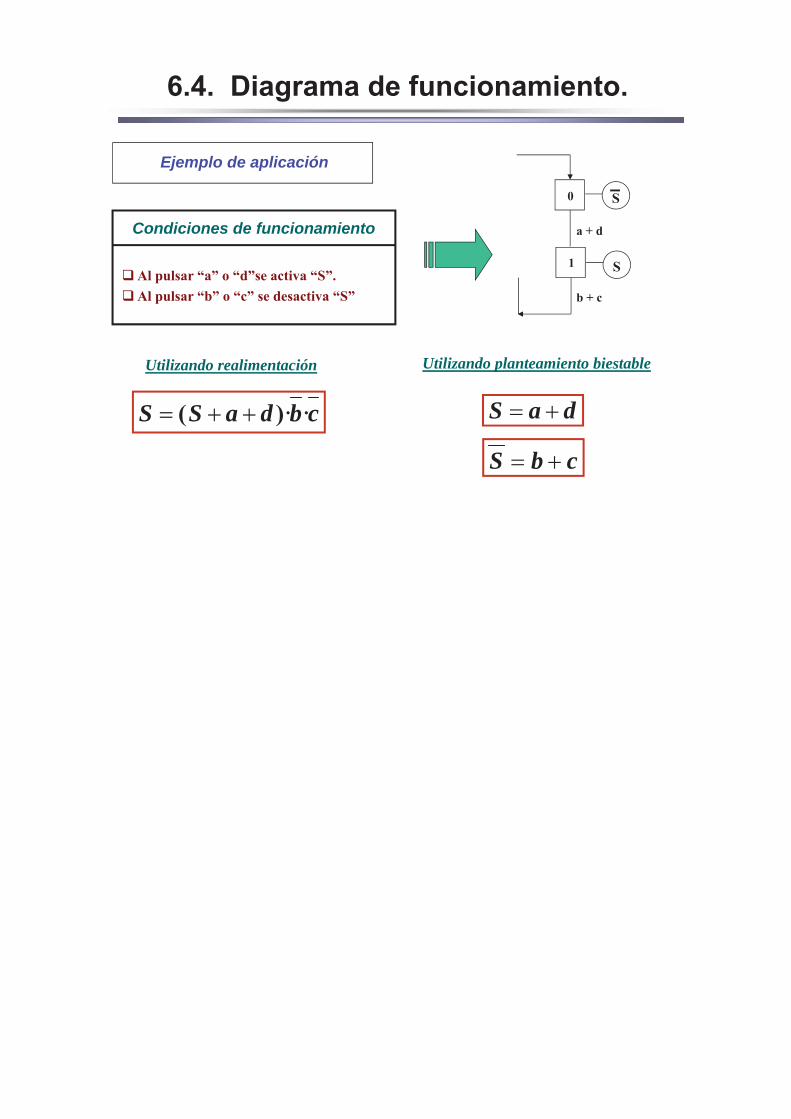
Ejemplo de aplicación
Condiciones de funcionamiento
Utilizando realimentación
cbdaSS
Utilizando planteamiento biestable
daS
cbS
Ejemplo de aplicación
Condiciones de funcionamiento
Utilizando realimentación
cbdaSS
Utilizando planteamiento biestable
daS
cbS
Bloque III: Diseño de automatismos programados
Programa
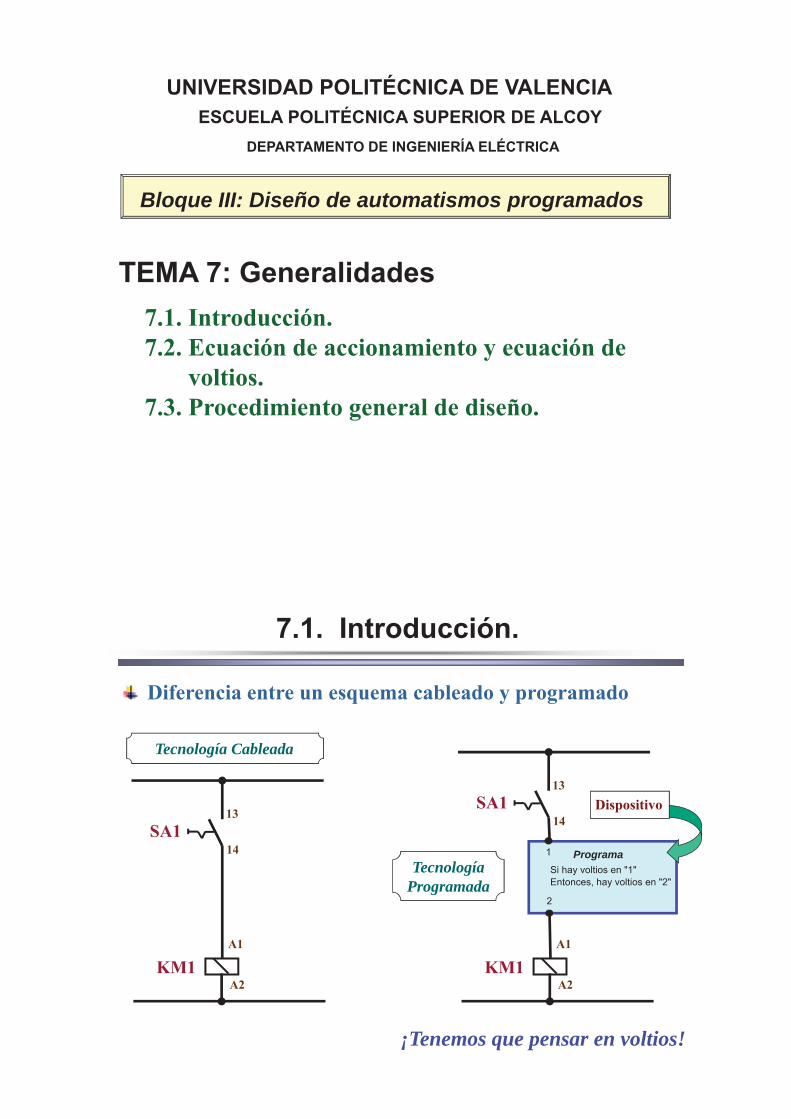
Tecnología Cableada
TecnologíaProgramada
¡Tenemos que pensar en voltios!
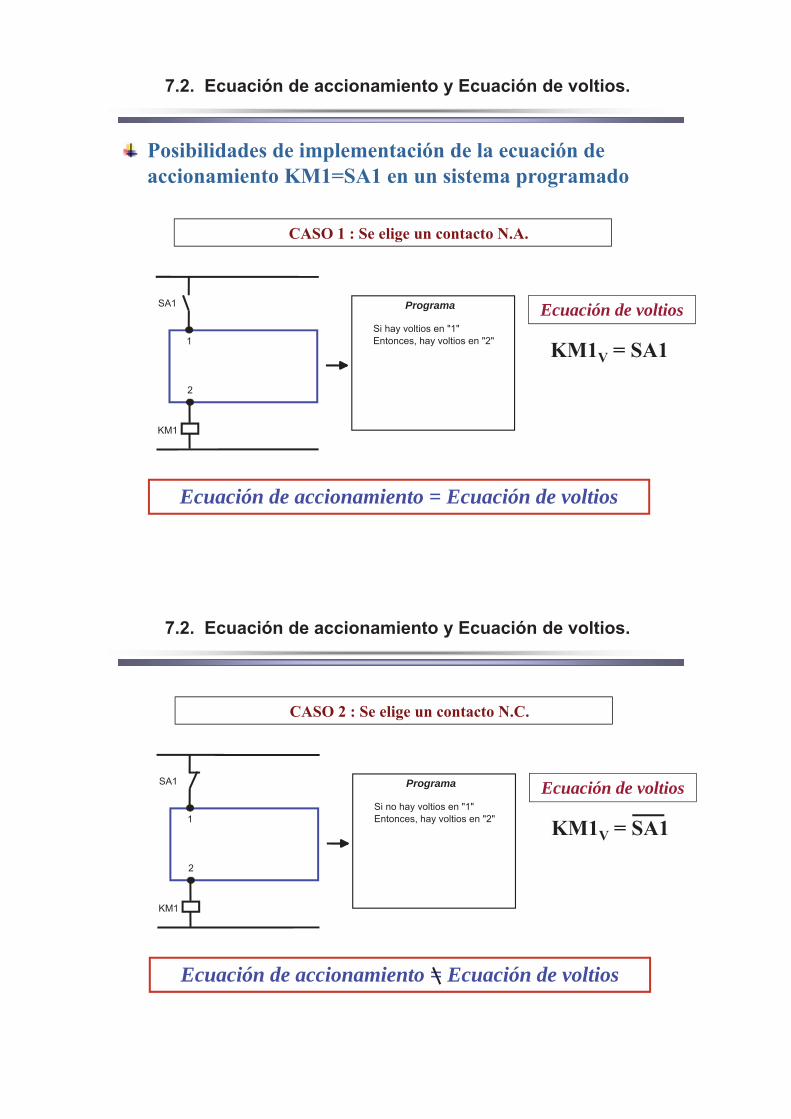
Programa
Ecuación de accionamiento = Ecuación de voltios
Ecuación de voltios
Programa
Ecuación de accionamiento = Ecuación de voltios
Ecuación de voltios
Programa
Ecuación de accionamiento = Ecuación de voltios
Ecuación de voltios
Programa
Ecuación de accionamiento = Ecuación de voltios
Ecuación de voltios
Ejemplo de aplicación
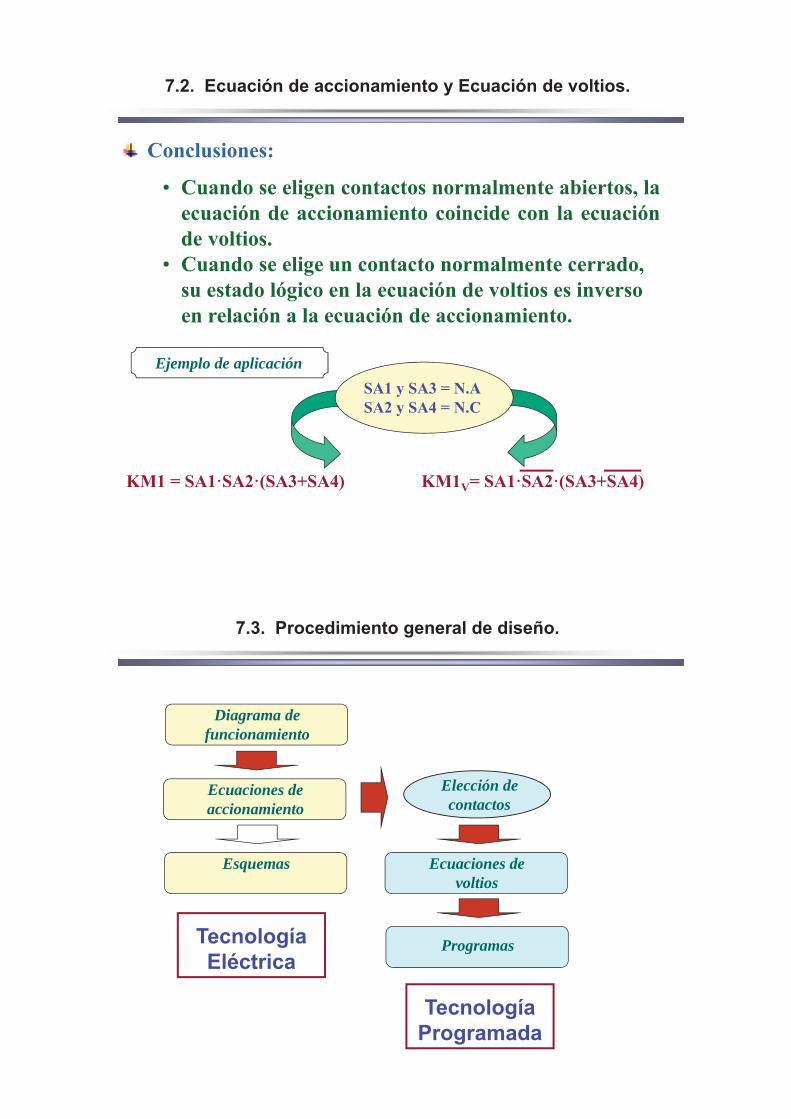
Diagrama de funcionamiento
Ecuaciones de accionamiento
Esquemas Ecuaciones de voltios
Programas
Elección decontactos
Bloque III: Diseño de automatismos programados
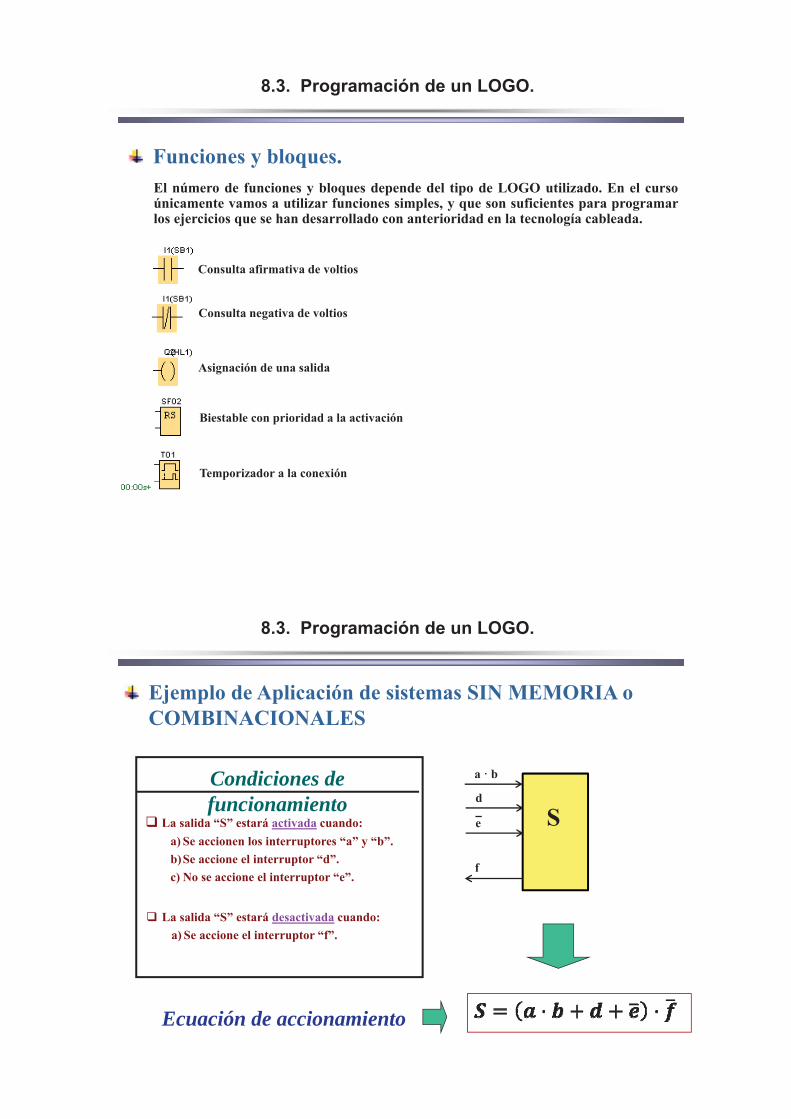
Condiciones de funcionamiento
Ecuación de accionamiento
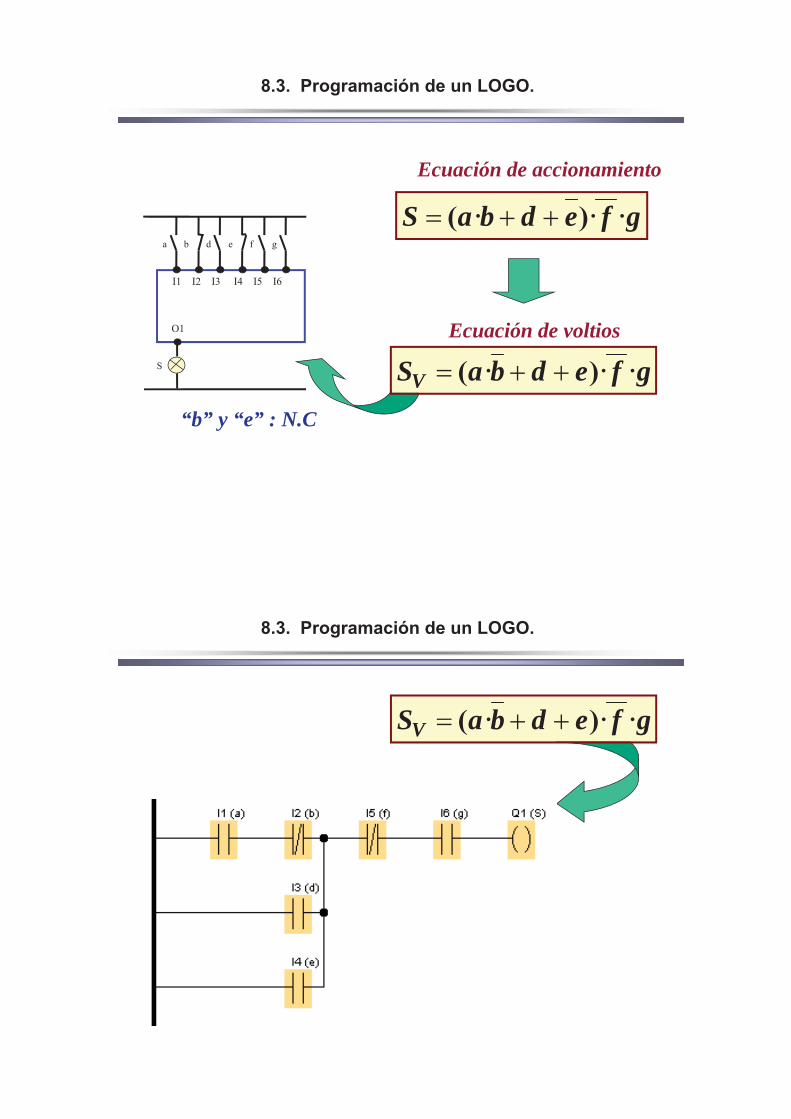
“b” y “e” : N.C
gfedbaS
gfedbaSV
Ecuación de accionamiento
Ecuación de voltios
gfedbaSV
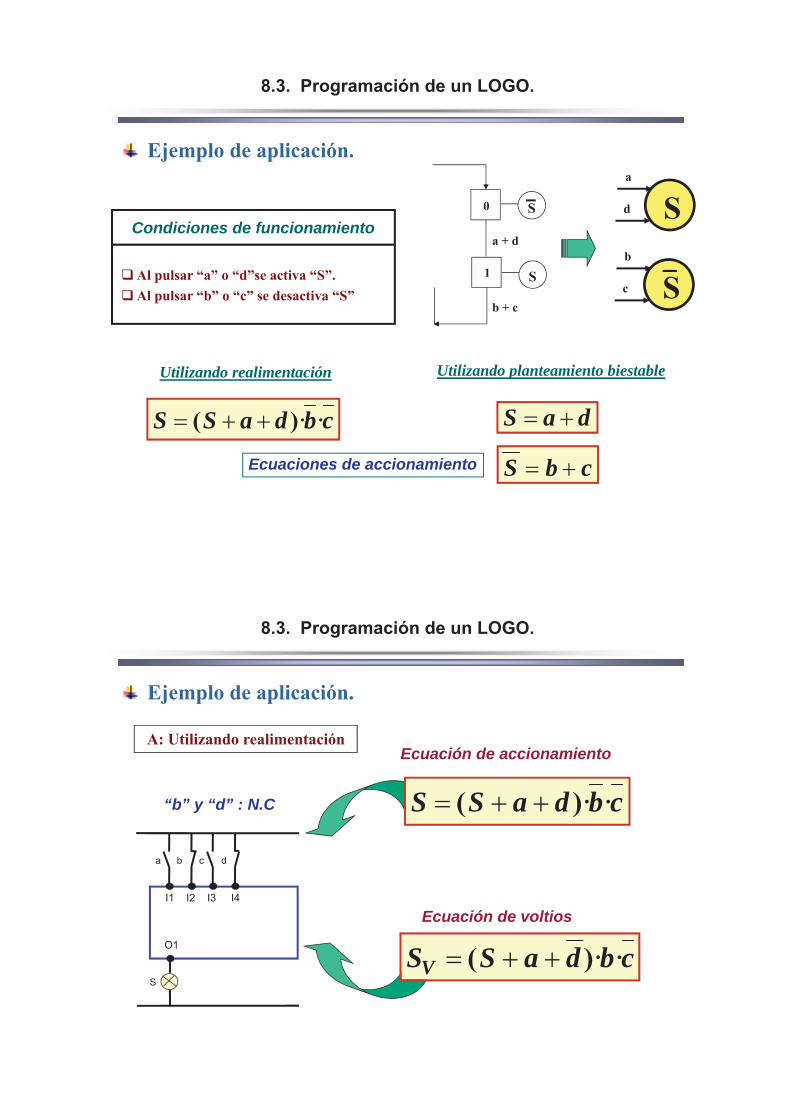
Condiciones de funcionamiento
Utilizando realimentación
cbdaSS
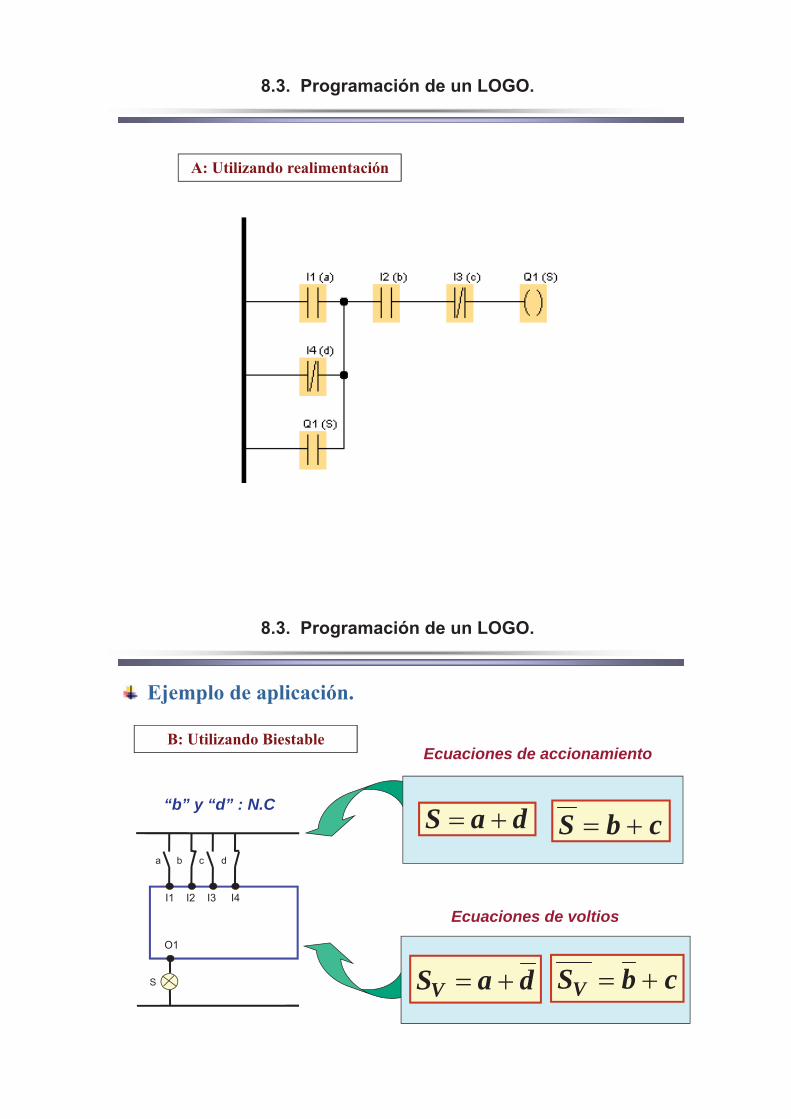
Utilizando planteamiento biestable
daS
cbSEcuaciones de accionamiento
“b” y “d” : N.C
Ecuación de voltios
Ecuación de accionamiento
cbdaSS
cbdaSSV
“b” y “d” : N.C
Ecuaciones de voltios
Ecuaciones de accionamiento
daS cbS
daSV cbSV