anÁlisis matricial
TRANSCRIPT

1
ANÁLISIS MATRICIAL
1. Aspectos generales
Al trabajar con el método de los desplazamientos tomamos como hipótesis la rigidez a
directa de las barras para hallar los desplazamientos que se producían en los nudos de
una estructura y así resolverla.
Figura 1: Orientación positiva de esfuerzos según convención
Figura 2: Orientación positiva de desplazamientos según convención
Por éste método llegamos a las siguientes expresiones para los momentos en función de
los desplazamientos, para una barra de E.I constante:
[ ]
[ ]
L
vvcon
ML
EIM
ML
EIM
AB
emp
BBA
z
B
emp
ABA
z
A
−=
+−+=
+−+=
ψ
ψθθ
ψθθ
322
322

2
También podemos despejar las fuerzas transversales al eje de la barra en función de los
desplazamientos, llegando a las siguientes expresiones:
[ ]
[ ] emp
BBA
z
B
emp
ABAz
A
YL
EIY
YL
EIY
+−+−=
+−+=
ψθθ
ψθθ
26
26
2
2
Para el desarrollo del análisis matricial admitiremos que las barras son deformables
longitudinalmente. Entonces, al tener una barra solamente sometida a directa (figura 1)
se generarán desplazamientos de sus nudos en la dirección de su eje (figura 2).
Figura 3: Orientación positiva de esfuerzos a directa según convención
Figura 4: Orientación positiva de desplazamientos según convención
Se tiene, por equilibrio de la barra: 0=+ BA XX . A su vez, siendo L el largo de la
barra, sabemos que el alargamiento de la misma será AB uuL −=∆ ; se tiene entonces
que su deformación unitaria es: L
uu
L
L AB −=
∆=ε .
Suponiendo la barra con sección de área A y módulo de elasticidad E constantes
tenemos entonces que la tensión a lo largo dela misma será:
L
uuEE AB ).(
.−
== εσ
De esta forma, podemos expresar los esfuerzos AX y BX en función de los
desplazamientos de los nudos, siendo:
)(.
. ABAB uuL
AEAXX −==−= σ
)(.
BAA uuL
AEX −=

3
2. Matriz de rigidez del elemento
Superponiendo el resultado anterior con las expresiones halladas para el método de los
desplazamientos obtenemos la siguiente ecuación matricial:
A la matriz LK la denominamos matriz de rigidez del elemento (o barra). Como se
puede observar, dicha matriz es simétrica.
Notando al vector de esfuerzos como LF y al vector de desplazamientos como L∆ ,
expresamos la relación hallada como:
LLL KF ∆= .
Los subíndices L corresponden a que se trata de coordenadas locales. Dado que estas
ecuaciones están referidas a un sistema de coordenadas relacionado con cada barra. En
el próximo ítem será visto mas en detalle este asunto.
3. Sistemas de coordenadas locales y globales
Cuando las barras de una estructura están orientadas en direcciones diferentes es
necesario transformar las relaciones de rigidez de cada elemento del sistema de
coordenadas locales del mismo hacia un sistema común de coordenadas globales.
Entonces se montan las matrices de rigidez de los elementos así obtenidas para
determinar la matriz de rigidez de la estructura completa.
Notaremos como GAu , , GAv , y GA,θ a los desplazamientos del nudo A según las
coordenadas globales, y como LAu , , LAv , y LA,θ a sus desplazamientos según
coordenadas locales de la barra en cuestión (sea esta la barra AB).
Definimos entonces como α el ángulo entre las coordenadas globales de la estructura y
las coordenadas locales de la barra, medido como positivo en sentido antihorario (tal
como muestra la figura 5).
B
B
B
A
A
A
v
u
v
u
θ
θ
B
B
B
A
A
A
M
Y
X
M
Y
X
*
460
260
6120
6120
0000
260
460
6120
6120
0000
22
2323
22
2323
44444444444 344444444444 21
−
−−−
−
−
−
−
=
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EA
LK

4
Figura 5: Ángulo α formado entre las coordenadas globales y las locales
De esta forma tenemos las siguientes relaciones entre desplazamientos en las distintas
coordenadas:
=
+=
−=
LAGA
LALAGA
LALAGA
vsenuv
senvuu
,,
,,,
,,,
cos..
.cos.
θθ
αα
αα
Dichas relaciones las podemos expresar en forma matricial:
−
=
LA
LA
LA
R
GA
GA
GA
v
u
sen
sen
v
u
,
,
,
,
,
,
*
100
0cos
0cos
θ
αα
αα
θ444 3444 21
La matriz R es una matriz de rotación de ángulo α en torno del eje z que permanece
fijo; Cumple que TRR =−1 . Ello se debe a que si R es una rotación de ángulo α
entonces su inversa es una rotación de ángulo -α. Sustituyendo en la matriz α por -α se
obtiene la traspuesta.
3214444 34444 21321LG
LB
LB
LB
LA
LA
LA
GB
GB
GB
GA
GA
GA
v
u
v
u
R
R
v
u
v
u
∆ℜ∆
=
,
,
,
,
,
,
,
,
,
,
,
,
*
0
0
θ
θ
θ
θ

5
La relación entre desplazamientos en coordenadas globales y locales para ambos
extremos de la barra, se puede indicar con la anterior ecuación matricial:
A la matriz de rotación para la barra la denominaremos ℜ , es una matriz de rotación de
66x .
La ecuación matricial hallada anteriormente la podemos resumir en LG ∆ℜ=∆ . o, lo que
es lo mismo: GL ∆ℜ=∆ − .1 .
La misma rotación la podemos aplicar al vector de fuerzas: LG FF .ℜ= .
Usando que LLL KF ∆= . y las relaciones anteriores, planteamos entonces:
GLLLLG KKFF ∆ℜℜ=∆ℜ=ℜ= − ...... 1
Definimos entonces la matriz de rigidez del elemento en coordenadas globales:
1.. −ℜℜ= LG KK
Como ya vimos, TRR =−1 . Por tanto:
=
=ℜ⇒
=ℜ
−
−−
T
T
R
R
R
R
R
R
0
0
0
0
0
01
1
1
Operando con la expresión 1.. −ℜℜ= LG KK , y descomponiendo la matriz KL en cuatro
submatrices tenemos:
=
=
=
T
T
LL
LL
T
T
LGR
R
KK
KK
R
R
R
RK
R
RK
0
0..
0
0
0
0.
0
0
22,21,
12,11,
.
=
=
T
L
T
L
T
L
T
L
T
T
LL
LL
RKRRKR
RKRRKR
R
R
KRKR
KRKR
....
....
0
0.
..
..
22,21,
12,11,
22,21,
12,11,
En resumen, la matriz de rigidez de una barra en coordenadas globales se puede
expresar como:
=
T
L
T
L
T
L
T
L
GRKRRKR
RKRRKRK
....
....
22,21,
12,11,
4. Casos con carga en el tramo
Cuando las cargas sobre la estructura no están aplicadas directamente sobre los nudos,
sino en los tramos de barra, debemos hallar un sistema de cargas “equivalentes” en los
nudos para poder realizar el análisis matricial.
Tomemos para fijar ideas la estructura de la figura 6.

6
Figura 6: Estructura con cargas en el tramo
Para estudiar el comportamiento de esta estructura la veremos como la superposición de
los dos estados de carga indicados en la figura 7:
Figura 7: Descomposición de las cargas originales en dos estados de carga.
La estructura (1) tiene las mismas cargas de la estructura original pero sus nudos se
encuentran completamente fijos (es decir, no pueden desplazarse ni vertical ni
horizontalmente ni girar sobre sí mismos). Fijar los nudos equivale a imponer
reacciones de empotramiento perfecto en cada uno de ellos.
Luego, para que la superposición de la estructura (1) más la (2) tenga el
comportamiento de la estructura original, la estructura (2) deberá tener aplicados en sus
nudos los esfuerzos opuestos a las reacciones de empotramiento perfecto.
De esta forma, la superposición de la estructura (1) con la (2) resulta en:
cargas(1) + cargas(2) = (cargas originales + reacc. empotramiento) + ( - reacc. empotramiento)
Es decir, las superposición de cargas (1)+(2) resulta en las cargas de la estructura
original, que es lo que se buscaba.
Los desplazamientos de los nudos de la estructura original serán entonces los
desplazamientos de la estructura (1) más los de la (2). Pero los desplazamientos de los
nudos de la estructura (1) son cero pues están impedidos. O sea que :

7
)2()2()1( entosdesplazamientosdesplazamientosdesplazami
nulos
=+444 3444 21
En definitiva, los desplazamientos en los nodos de la estructura original serán los
mismos que los de la estructura cargada con los esfuerzos opuestos a las reacciones de
empotramiento perfecto.
En dicha estructura tenemos cargas únicamente en los nudos y por lo tanto podemos
aplicar el procedimiento ya visto para resolverla por análisis matricial.
5. Programas de análisis matricial
Los programas de cálculo de estructuras realizan el cálculo una vez definidos los
distintos parámetros de la misma.
Esto implica la definición de:
• Nodos
• Conectividades. Estas definen la barra por un nodo inicial y un nodo final.
• Propiedades de las barras (área, inercia, módulo de elasticidad)
• Restricciones (apoyos)
• Cargas (en nodos y barras). Normalmente las cargas en los nodos se ingresan en
coordenadas globales y las cargas en las barras en coordenadas locales de cada
barra. Debe observarse que las cargas en las barras deben ubicarse de acuerdo a
como se eligieron las conectividades.
El procedimiento de cálculo seguido a partir de allí es el siguiente:
Etapa 1: Cálculo de la matriz de rigidez de la estructura [K]
Se calcula la matriz de rigidez de cada elemento (en coordenadas locales) [Kb],
el ángulo α y la matriz de rotación de cada elemento, [R]. A continuación se realiza la
conversión de las matrices [Kb] a coordenadas globales. Por último se hace el ensamble
de las matrices de rigidez de cada elemento en coordenadas globales, obteniendo [K],
matriz de rigidez de la estructura.
Etapa 2: Introducción de condiciones de contorno.
Se hace la reducción de la matriz [K] de forma que abarque solamente las filas y
columnas correspondientes a los desplazamientos incógnitas, obteniendo una nueva
matriz [Ka].
Etapa 3: Cálculo del vector de cargas
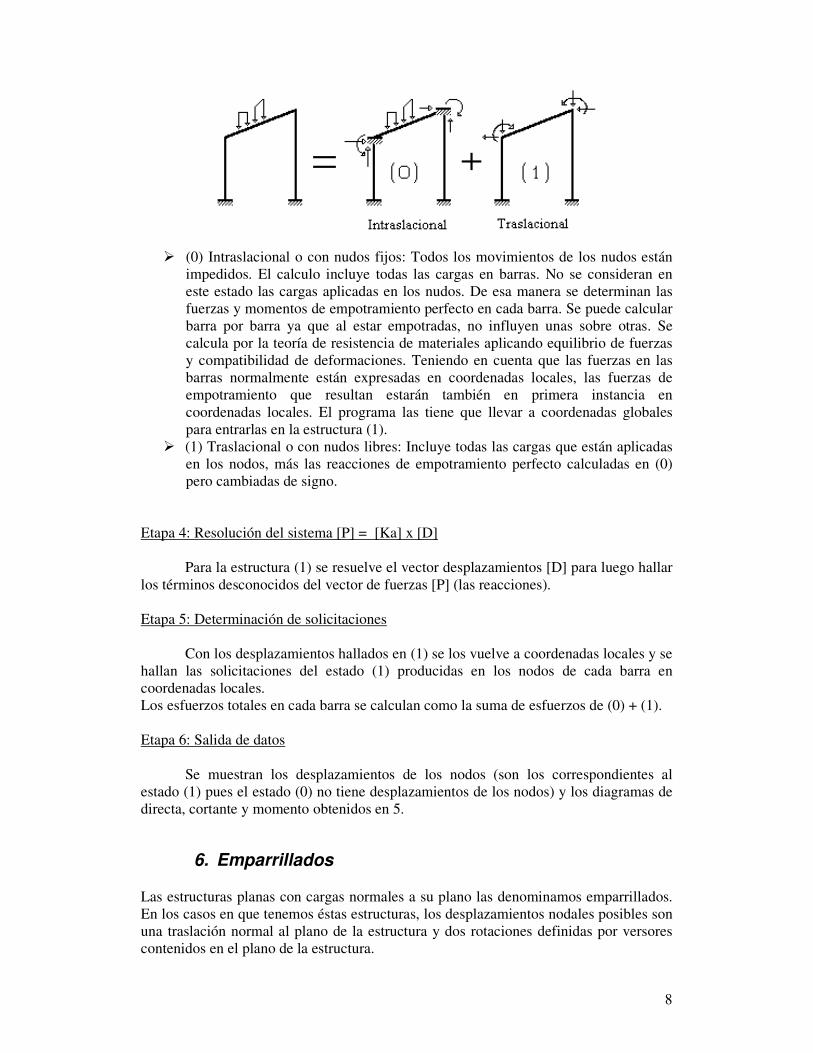
Se descompone la estructura como se indica en la figura:
8
� (0) Intraslacional o con nudos fijos: Todos los movimientos de los nudos están
impedidos. El calculo incluye todas las cargas en barras. No se consideran en
este estado las cargas aplicadas en los nudos. De esa manera se determinan las
fuerzas y momentos de empotramiento perfecto en cada barra. Se puede calcular
barra por barra ya que al estar empotradas, no influyen unas sobre otras. Se
calcula por la teoría de resistencia de materiales aplicando equilibrio de fuerzas
y compatibilidad de deformaciones. Teniendo en cuenta que las fuerzas en las
barras normalmente están expresadas en coordenadas locales, las fuerzas de
empotramiento que resultan estarán también en primera instancia en
coordenadas locales. El programa las tiene que llevar a coordenadas globales
para entrarlas en la estructura (1).
� (1) Traslacional o con nudos libres: Incluye todas las cargas que están aplicadas
en los nodos, más las reacciones de empotramiento perfecto calculadas en (0)
pero cambiadas de signo.
Etapa 4: Resolución del sistema [P] = [Ka] x [D]
Para la estructura (1) se resuelve el vector desplazamientos [D] para luego hallar
los términos desconocidos del vector de fuerzas [P] (las reacciones).
Etapa 5: Determinación de solicitaciones
Con los desplazamientos hallados en (1) se los vuelve a coordenadas locales y se
hallan las solicitaciones del estado (1) producidas en los nodos de cada barra en
coordenadas locales.
Los esfuerzos totales en cada barra se calculan como la suma de esfuerzos de (0) + (1).
Etapa 6: Salida de datos
Se muestran los desplazamientos de los nodos (son los correspondientes al
estado (1) pues el estado (0) no tiene desplazamientos de los nodos) y los diagramas de
directa, cortante y momento obtenidos en 5.
6. Emparrillados
Las estructuras planas con cargas normales a su plano las denominamos emparrillados.
En los casos en que tenemos éstas estructuras, los desplazamientos nodales posibles son
una traslación normal al plano de la estructura y dos rotaciones definidas por versores
contenidos en el plano de la estructura.

9
De aquí en adelante trabajaremos con emparrillados contenidos en el plano xy, con
cargas de fuerzas en la dirección del eje z y cargas de momentos con versores según los
ejes x e y.
Figura 8: Emparrillado
De esta forma, los esfuerzos en los nudos serán positivos con los sentidos indicados en
la figura 9, y análogamente para el sentido de los desplazamientos y giros indicados en
la figura 10.
Figura 9: Orientación positiva de los esfuerzos para emparrillados
Figura 10: Orientación positiva de los desplazamientos y giros para emparrillados
Como se puede observar, los momentos YM y los giros Yθ son positivos en el mismo
sentido que lo eran para las vigas en pórticos planos estudiadas anteriormente, mientras
que las fuerzas F y los desplazamientos w son contrarios.
Se deducen entonces las expresiones para los momentos YM y las fuerzas F en los
extremos de la barra en función de los giros Yθ y desplazamientos verticales w
tomando las ecuaciones halladas para el estudio de pórtico plano y modificando los
signos mencionados:
YBBYAAYAL
EIw
L
EI
L
EIw
L
EIM θθ
264622
+++−
=

10
YBBYAAYBL
EIw
L
EI
L
EIw
L
EIM θθ
462622
+++−
=
YBBYAAAL
EIw
L
EI
L
EIw
L
EIZ θθ
2323
612612−−−=
YBBYAABL
EIw
L
EI
L
EIw
L
EIZ θθ
2323
612612+++
−=
Los momentos XAM y XBM son esfuerzos de torsión sobre la barra. Para que la barra
esté en equilibrio se debe cumplir que 0=+ XBXA MM , por lo que sabemos que
XAXB MM −= .
Además sabemos que el giro resultante en la barra, XAXBX θθθ −=∆ , producido por un
momento torsor TM , tiene la forma: GJ
LM T
X =∆θ , donde G es el módulo de corte del
material y J es la inercia torsional de la sección.
Se deducen entonces las expresiones de los momentos XAM y XBM en función de los
giros XAθ y XBθ :
( )XBXAXAL
GJM θθ −=
( )XBXAXBL
GJM θθ +−=
Expresamos los vectores de fuerzas y de desplazamientos como se muestra a
continuación:
=
B
YB
XB
A
YA
XA
Z
M
M
Z
M
M
F ;
=∆
B
YB
XB
A
YA
XA
w
w
θ
θ
θ
θ
Tenemos entonces la relación ∆= .KF , donde K es la matriz de rigidez para un
elemento de emparrillado en coordenadas locales y tiene la siguiente forma:

11
−
−
−
−−−
−
−
=
3232
22
3232
22
1260
1260
640
620
0000
1260
1260
620
640
0000
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
GJ
L
GJL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
GJ
L
GJ
K
Para trabajar un emparrillado de barras con distintas orientaciones debemos rotar cada
una de las matrices de rigidez y expresarlas en el sistema de coordenadas globales de la
estructura.
Dicha rotación se realiza en torno al eje vertical z tal como se muestra en la figura 11:
Figura 11: Rotación de coordenadas locales a globales para emparrillados
La matriz de rotación resulta entonces igual a la hallada anteriormente para pórticos
planos:
−
=
100
0cos
0cos
αα
αα
sen
sen
R
Los restantes pasos son análogos a los del caso del pórtico o el reticulado.

12
7. Ejemplo análisis matricial – pórticos planos
Se tiene la estructura de la figura con módulo de elasticidad y sección constante en
todas las barras.
En primer lugar definiremos el sistema de coordenadas global en el cual trabajaremos y
los sistemas de coordenadas locales para cada barra. Los mismos se indican en la
siguiente figura:

13
Dado que la barra AB y la barra BC tienen las mismas propiedades ( E , I , A , L ), la
matriz de rigidez en coordenadas locales será la misma para ambas.
−
−−−
−
−
−
−
==
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EA
KK BClocalABlocal
460
260
6120
6120
0000
260
460
6120
6120
0000
22
2323
22
2323
,,
Ya que las coordenadas locales de la barra BC coinciden con las coordenadas globales
elegidas para la estructura, tenemos entonces que BClocalBCglobal KK ,, = .
En el caso de la barra AB, el ángulo entre las coordenadas globales y las locales de la
barra es °= 90ABα , por lo cual la matriz de rotación será:
−
⇒
−
= °=
100
001
010
100
0cos
0cos
90αα αα
αα
Rsen
sen
R
Llamando a los cuadrantes de la matriz AB de la siguiente forma:
=
BBBA
ABAA
ABlocalKK
KKK ., , la matriz global para dicha barra será:
=
°°°°
°°°°
T
BB
T
BA
T
AB
T
AA
ABglobalRKRRKR
RKRRKRK
90909090
90909090
,....
....

14
Se obtiene entonces:
−
−
−
−
−
−−−
=
L
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EI
K ABglobal
40
620
6
0000
60
1260
12
20
640
6
0000
60
1260
12
22
2323
22
2323
,
Para hallar la matriz global de la estructura, debemos ensamblar las matrices de cada
barra en coordenadas globales, superponiendo los términos correspondientes a los
mismos nodos.
Llamando entonces a los distintos cuadrantes:
=
barraAB
BB
barraAB
BA
barraAB
AB
barraAB
AA
ABglobalKK
KKK , ,
=
barraBC
CC
barraBC
CB
barraBC
BC
barraBC
BB
BCglobalKK
KKK , ,
tendremos la matriz global de la siguiente forma:
+=barraBC
CC
barraBC
CB
barraBC
BC
barraBC
BB
barraAB
BB
barraAB
BA
barraAB
AB
barraAB
AA
global
KK
KKKK
KK
K
0
0

15
Matriz global de la estructura:
−
−−−
−
−+−
−+−
−+−
−
−
−−−
=
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EI
L
EA
L
EAL
EA
L
EI
L
EA
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EI
K totglobal
460
260000
6120
6120000
0000000
260
446620
6
6120
612000
006
0126
012
0002
064
06
0000000
0006
0126
012
22
2323
2222
2323
2323
22
2323
,
Los vectores de desplazamientos y de esfuerzos los hallaremos en coordenadas globales.
El vector de desplazamientos será, en principio, de la siguiente forma:
=
C
C
C
B
B
B
A
A
A
global
v
u
v
u
v
u
u
θ
θ
θ
r
De acuerdo con las restricciones que imponen los vínculos a tierra, sabemos que tanto el
nudo A como el nudo C no tendrán desplazamiento horizontal ni vertical o giro.

16
El vector de desplazamientos lo podemos rescribir entonces de la siguiente forma:
=
0
0
0
0
0
0
B
B
B
global v
u
u
θ
r.
El vector de esfuerzos lo podemos estudiar como la suma de dos componentes: el vector
de reacciones de los vínculos a tierra más el vector de cargas externas.
asc
global
reacciones
globalglobal FFF argrrr
+=
El primero es un vector con incógnitas a resolver (a excepción de las entradas nulas que
aparecen donde no hay vínculos), mientras que el segundo es un vector de cargas
enteramente conocido.
El vector de reacciones será entonces:
=
C
C
C
A
A
A
reacciones
global
M
V
H
M
V
H
F
0
0
0r
El vector de cargas deberá contener tanto la carga P horizontal aplicada en el nudo B
como los efectos de la carga q que se encuentra distribuida en la barrra BC.

17
Para llevar la carga q de tramo a cargas en los nudos, debemos hallar las reacciones que
se producirían en B y en C si la barra estuviese empotrada-empotrada.
Utilizando las tablas de momentos de empotramiento perfecto obtenemos el valor de las
reacciones de momento en B y en C; luego por equilibrio obtenemos las reacciones
verticales en ambos extremos.
Debemos cargar el tramo BC con los esfuerzos opuestos a las reacciones de
empotramiento perfecto; es decir, con las siguientes cargas:
Esto resulta en el siguiente vector de cargas:
−
−
−
=
2
2
arg
192
1132
130
192
532
3
0
0
0
qL
qL
qL
qL
P
Fasc
global
r

18
El vector de esfuerzos total será entonces:
+
−
−
−
=+=
2
2
arg
192
1132
13
192
532
3
qLM
qLV
H
qL
qL
P
M
V
H
FFF
C
C
C
A
A
A
asc
global
reacciones
globalglobal
rrr
El sistema completo es el siguiente:
+
−
−
−
=
−
−−−
−
−+−
−+−
−+−
−
−
−−−
2
2
22
2323
2222
2323
2323
22
2323
192
1132
13
192
532
3
0
0
0
0
0
0
*
460
260000
6120
6120000
0000000
260
446620
6
6120
612000
006
0126
012
0002
064
06
0000000
0006
0126
012
qLM
qLV
H
qL
qL
P
M
V
H
v
u
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EI
L
EA
L
EAL
EA
L
EI
L
EA
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EI
B
C
C
A
A
A
B
B
B
θ

19
Comenzaremos por hallar los desplazamientos. Para ello, utilizaremos las ecuaciones en
desplazamientos con términos definidos en esfuerzos. De esta forma, el sistema
reducido es el siguiente:
−
−=
+
+
+
2
22
23
23
192
532
3*
4466
6120
60
12
qL
qL
P
v
u
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EAL
EI
L
EA
L
EI
B
B
B
θ
Para la resolución asignaremos los siguientes valores a los parámetros del problema:
22000cm
kNE =
Sección de cmcmx2515 ⇒ 2375cmA = , 425,531.19 cmI = .
mL 4=
kNP 5=
mkNq 10=
Sustituyendo los valores de E , I , A , L , P y q , y resolviendo el sistema, se obtienen
los desplazamientos buscados:
⋅−
⋅−
⋅
=
−
−
−
rad
cm
cm
v
u
B
B
B
4
3
3
1036,5
1058,1
1007,3
θ
Para hallar las reacciones utilizamos las ecuaciones restantes del sistema completo,
obteniéndose:
−
−
−
=
=
kNm
kN
kN
kNm
kN
kN
M
V
H
M
V
H
F
A
C
C
A
A
A
reacciones
global
24,10
05,17
76,5
0
0
0
00,1
95,2
76,0
0
0
0r
Estos apuntes fueron elaborados por:
Dr. Ing. Atilio Morquio
Ing. María Laura Reboredo
Ing. Agustín Spalvier