análisis en el dominio transformado - fi.mdp.edu.ar · iii-1) series de fourier sistemas...
TRANSCRIPT
1
Departamento de Matemática Facultad de Ingeniería
Universidad Nacional de Mar del Plata
MMMaaattteeemmmááátttiiicccaaa AAAvvvaaannnzzzaaadddaaa
hhhttttttppp::://////wwwwwwwww333...fffiii...mmmdddppp...eeeddduuu...aaarrr///mmmaaattteeeaaavvvaaannnzzzaaadddaaa
mmmaaattteeeaaavvvaaannnzzzaaadddaaa@@@fffiii...mmmdddppp...eeeddduuu...aaarrr
2018
2
Contenido
INTRODUCCIÓN …………………………………………………………………………...3
TEMAS DE VARIABLE COMPLEJA ……………………………………………………...9
ANÁLISIS EN EL DOMINIO NATURAL (TEMPORAL; ESPACIAL )………………….31
ANÁLISIS EN EL DOMINIO TRANSFORMADO ……………………………………… 93
APÉNDICE ……………………………………………………………………………… 177
TABLAS ……………………………………………………………………………………185
Temas de Variable Compleja
3
INTRODUCCIÓN
Estos apuntes de cátedra tienen la finalidad de guiar al alumno en el estudio de los diferentes
temas de la asignatura. No debe considerarse único material para el estudio de los contenidos
impartidos, sino que debe ser complementado con la bibliografía detallada en las páginas
siguientes.
Para comprender sin dificultades los contenidos, se requiere tener conocimiento y habilidad en
la resolución de ejercicios de los siguientes temas:
Álgebra de números complejos.
Topología del plano complejo.
Funciones de variable compleja.
Condiciones necesarias y suficientes de Cauchy-Riemann.
Funciones analíticas.
Funciones armónicas.
Familia de curvas ortogonales.
Integrales curvilíneas de una función compleja.
Los alumnos deberán leer, siguiendo el cronograma, los temas relacionados con la clase
siguiente. Durante las teorías, los profesores desarrollarán los temas, realizarán ejemplos y
explicarán los nuevos conceptos fundamentándolos con las demostraciones más importantes,
aclararán las dudas presentadas e integrarán los conocimientos.
Los responsables de las prácticas explicarán distintos tipos de ejercicios integradores y
atenderán consultas de los alumnos.
Se recomienda asistir a las clases teóricas y prácticas ya que se realizarán explicaciones
conceptuales necesarias para la comprensión de los distintos temas.
Temas de Variable Compleja
4
Integrantes de la cátedra:
- Dra. Gloria Frontini
- Dra. Gabriela Messineo
- Dr. Fernando Otero
- Ing. Carlos Chiuro
- Mg. Ing. Alberto López
- Sr. Agustín Olarce
- Ing. Eugenio Gelós
Objetivos generales de la asignatura
Familiarizar al alumno con el vocabulario adecuado para permitirle una mayor comprensión
de los contenidos impartidos en las asignaturas usuarias de ésta.
Capacitar al alumno para profundizar los temas de acuerdo con las necesidades de cada
especialidad.
Relacionar los diferentes conceptos, a fin de lograr un manejo integral de los mismos y
plantear situaciones nuevas.
Régimen de promoción:
La evaluación de la asignatura a lo largo del cursado se realizará en las siguientes instancias:
2 exámenes parciales teórico prácticos que serán calificados en la escala de 1 a 100
puntos y su aprobación corresponderá a una nota de 50 o más puntos. La ausencia a un
parcial significa cero como nota.
Seminarios con Matlab, que deberán realizarse antes de cada parcial. Serán de
asistencia obligatoria, siendo ésta la condición indispensable para poder rendir el parcial
correspondiente.
1 Recuperatorio que puede utilizarse para reemplazar la nota de un parcial
desaprobado.
Cumplidas esas etapas el alumno podrá estar:
PROMOCIONADO: Si la suma de los dos parciales aprobados es de 140 puntos como
mínimo, sin haber hecho uso del recuperatorio.
HABILITADO: Si la suma de los dos parciales es de 100 puntos como mínimo.
En este caso podrá aprobar la asignatura rindiendo un examen TOTALIZADOR para el cual
tiene tres posibilidades.
La nota final del alumno en la asignatura resulta de las notas obtenidas en el totalizador y en los
parciales.
DESAPROBADO: Si no cumple con las condiciones anteriores. En este caso el alumno deberá
recursar la materia.
Temas de Variable Compleja
5
Programa analítico
I) Variable Compleja
I-1) Transformación e Integración.
Introducción y repaso. Transformación Conforme. Integrales en el campo complejo.
Teorema de Cauchy-Goursat. Consecuencias. Fórmula de la integral de Cauchy y de la
Derivada de la integral de Cauchy.
I-2) Series de potencias. Polos y residuos.
Series de Taylor. Series de Laurent. Métodos prácticos. Desarrollos en serie.
Convergencia. Definición de residuos. Singularidades aisladas: definición y
clasificación. Fórmulas para el cálculo de residuos. Teorema de los residuos.
II) Análisis de señales y sistemas en el dominio natural.
II-1) Clasificación y propiedades de Señales
Análisis de señales en el dominio del tiempo. Señales periódicas y no periódicas.
Señales de energía y de potencia. Tipos de señales. Función impulso. Función impulso
como límite de otra función. Función impulso desplazada. Propiedades.
II-2) Sistemas lineales e invariantes en el tiempo.
Análisis de sistemas lineales. Definición de sistemas lineales. Función operacional del
sistema. Solución de ecuaciones diferenciales en el dominio del tiempo. Solución
transitoria y permanente de un sistema estable. Aplicaciones a sistemas lineales.
II-3) Convolución.
Cálculo y propiedades de la integral de convolución. Cálculo de la respuesta al impulso.
Respuesta a funciones exponenciales. Estabilidad de un sistema. Relación entre la
respuesta al escalón y la respuesta al impulso.
II-4) Variable de estado.
Modelado de sistemas lineales mediante variables de estado. Concepto de estado.
Obtención del modelo de variables de estado para sistemas de una entrada, una salida de
tiempo continuo. Modelo de la segunda forma canónica. Definición de matriz de
transición. Solución de ecuaciones de estado en el dominio temporal. Cálculo de la
matriz de transición. Estabilidad.
III) Análisis de señales y sistemas en el dominio transformado.
III-1) Series de Fourier
Sistemas ortogonales de funciones. Funciones seccionalmente continuas. Vectores y
señales. Series de Fourier de una función relativa a un sistema ortonormal.
Aproximación cuadrática. Coeficientes de Fourier. Identidad de Parseval. Series
trigonométrica y exponencial de Fourier. Simetría de la forma de onda. Integración y
diferenciación de las series de Fourier. Espectro de frecuencia discreta. Definición.
Espectro de amplitud y de fase. Propiedades. Espectro de potencia. Respuesta de un
sistema lineal a una función periódica.
Temas de Variable Compleja
6
III-2) Transformada e integral de Fourier
Forma trigonométrica de la integral de Fourier. Convergencia de la integral de Fourier.
Transformada de Fourier. Linealidad de la transformada. Propiedades.
Forma seno y coseno de la integral de Fourier. Transformadas seno y coseno.
Transformada inversa de Fourier. Propiedades. Convolución.
III-3) Transformada de Laplace
Definición unilateral de la transformada de Laplace. Teoremas de existencia.
Convergencia. Propiedades. Transformada inversa. Propiedades. Métodos para
calcularla. Aplicaciones. Función de transferencia. Análisis de la estabilidad de un
sistema. Diagramas de bloques en el tiempo y en la frecuencia compleja. Análisis y
solución del modelo en variables de estado mediante la Transformada de Laplace.
Propiedades de la matriz de transición de los estados. Relación con la función de
transferencia. Estabilidad. Transformaciones de semejanza. Transformación por los
autovectores.
Bibliografía
E.KREYSZIG: Matemáticas avanzadas para Ingeniería. Ed. Limusa.
R.V.CHURCHILL; J.W.BROWN: Variable compleja y aplicaciones. Ed. Mc Graw Hill.
M.R.SPIEGEL: Variable compleja. Serie Schaum. Ed. Mc Graw Hill.
R.A.GABEL, R.A. ROBERTS: Señales y Sistemas lineales. Ed. Limusa S.A.
C.D.MC GILLEN, H.R.COOPER: Continuos and Discrete Signal and System Analysis.
Ed.Holt-Rinehart and Winston.
R.V.CHURCHILL: Series de Fourier y problemas de contorno. Ed. Mc Graw Hill.
H.R.HSU: Análisis de Fourier. Fondo educativo interamericano S.A.
M.R.SPIEGEL: Transformada de Laplace. Serie Schaum. Mc Graw Hill.
A.PAPOULIS: The Fourier Integral and its Aplications. Mc Graw Hill.
M.R.SPIEGEL: Análisis de Fourier. Serie Schaum. Ed. Mc Graw Hill.
OPPENHEIN –WILLSKY: Señales y Sistemas. Prentice Hall.
C.L.PHILLIPS - J.M.PARR: Signals, Systems, and Transforms. Prentice Hall.
http://www.jhu.edu/~ signals
Temas de Variable Compleja
7
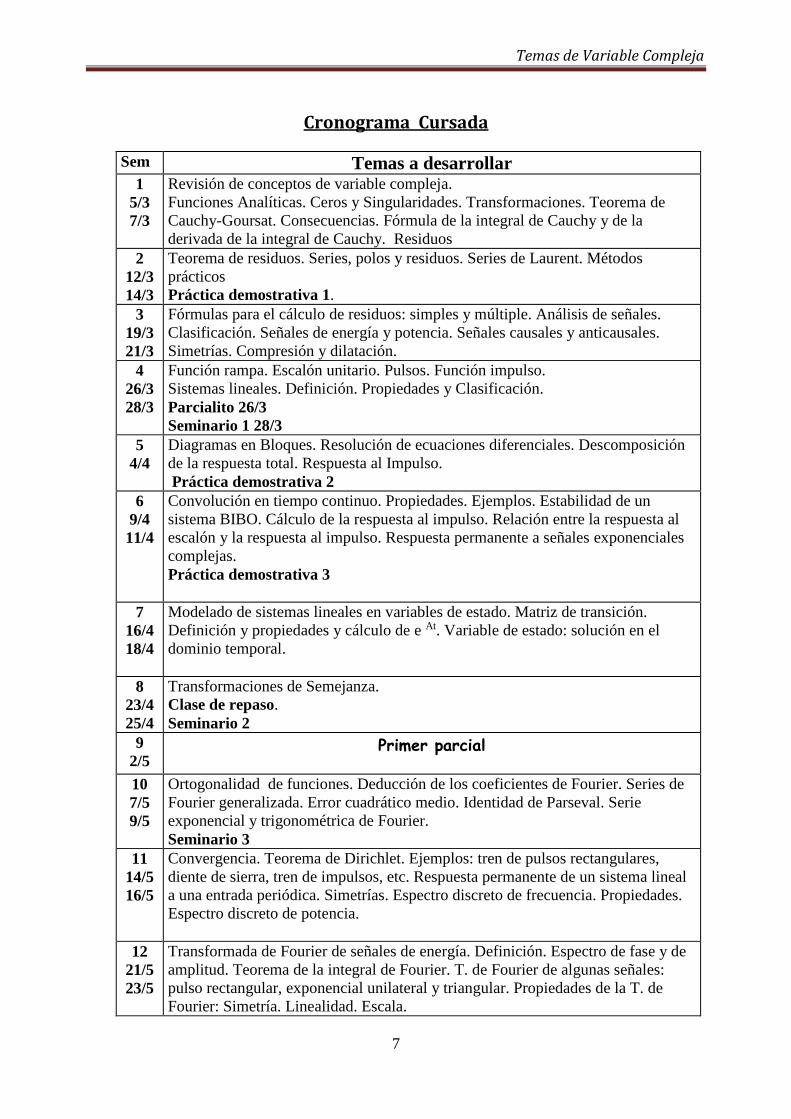
Cronograma Cursada
Sem Temas a desarrollar 1
5/3
7/3
Revisión de conceptos de variable compleja.
Funciones Analíticas. Ceros y Singularidades. Transformaciones. Teorema de
Cauchy-Goursat. Consecuencias. Fórmula de la integral de Cauchy y de la
derivada de la integral de Cauchy. Residuos
2
12/3
14/3
Teorema de residuos. Series, polos y residuos. Series de Laurent. Métodos
prácticos
Práctica demostrativa 1.
3
19/3
21/3
Fórmulas para el cálculo de residuos: simples y múltiple. Análisis de señales.
Clasificación. Señales de energía y potencia. Señales causales y anticausales.
Simetrías. Compresión y dilatación.
4
26/3
28/3
Función rampa. Escalón unitario. Pulsos. Función impulso.
Sistemas lineales. Definición. Propiedades y Clasificación.
Parcialito 26/3
Seminario 1 28/3
5
4/4
Diagramas en Bloques. Resolución de ecuaciones diferenciales. Descomposición
de la respuesta total. Respuesta al Impulso.
Práctica demostrativa 2
6
9/4
11/4
Convolución en tiempo continuo. Propiedades. Ejemplos. Estabilidad de un
sistema BIBO. Cálculo de la respuesta al impulso. Relación entre la respuesta al
escalón y la respuesta al impulso. Respuesta permanente a señales exponenciales
complejas.
Práctica demostrativa 3
7
16/4
18/4
Modelado de sistemas lineales en variables de estado. Matriz de transición.
Definición y propiedades y cálculo de e At. Variable de estado: solución en el
dominio temporal.
8
23/4
25/4
Transformaciones de Semejanza.
Clase de repaso.
Seminario 2
9
2/5 Primer parcial
10
7/5
9/5
Ortogonalidad de funciones. Deducción de los coeficientes de Fourier. Series de
Fourier generalizada. Error cuadrático medio. Identidad de Parseval. Serie
exponencial y trigonométrica de Fourier.
Seminario 3
11
14/5
16/5
Convergencia. Teorema de Dirichlet. Ejemplos: tren de pulsos rectangulares,
diente de sierra, tren de impulsos, etc. Respuesta permanente de un sistema lineal
a una entrada periódica. Simetrías. Espectro discreto de frecuencia. Propiedades.
Espectro discreto de potencia.
12
21/5
23/5
Transformada de Fourier de señales de energía. Definición. Espectro de fase y de
amplitud. Teorema de la integral de Fourier. T. de Fourier de algunas señales:
pulso rectangular, exponencial unilateral y triangular. Propiedades de la T. de
Fourier: Simetría. Linealidad. Escala.
Temas de Variable Compleja
8
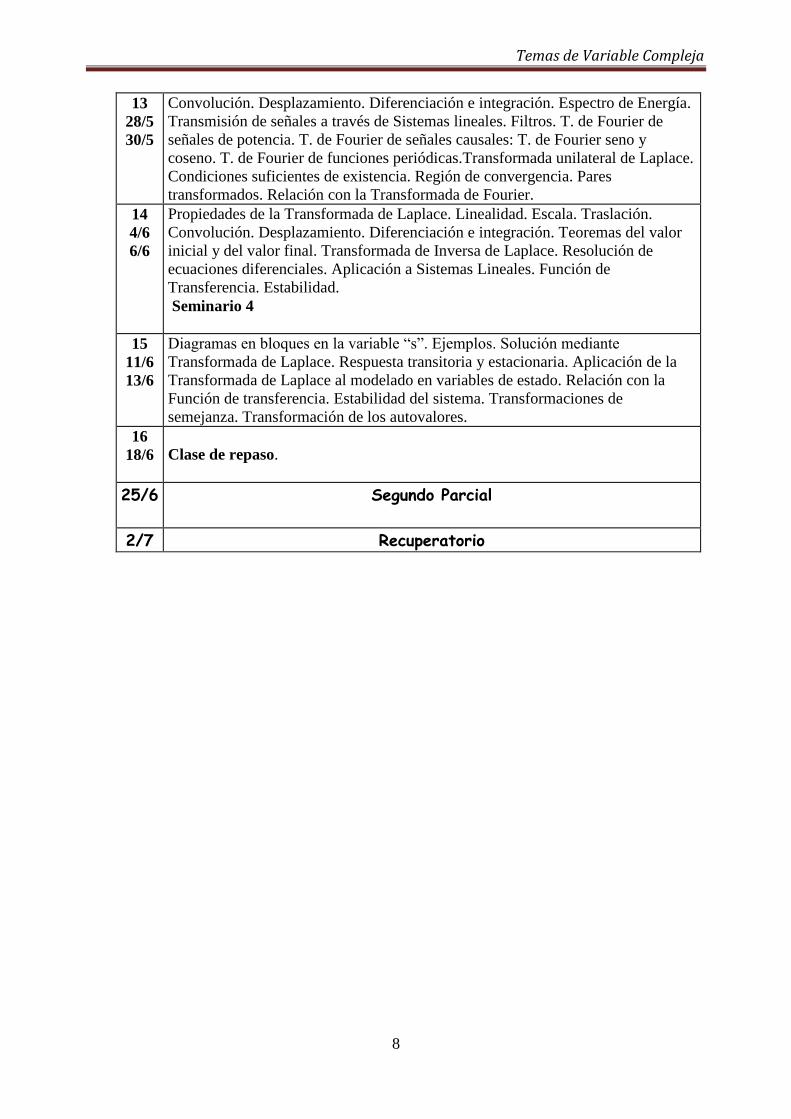
13
28/5
30/5
Convolución. Desplazamiento. Diferenciación e integración. Espectro de Energía.
Transmisión de señales a través de Sistemas lineales. Filtros. T. de Fourier de
señales de potencia. T. de Fourier de señales causales: T. de Fourier seno y
coseno. T. de Fourier de funciones periódicas.Transformada unilateral de Laplace.
Condiciones suficientes de existencia. Región de convergencia. Pares
transformados. Relación con la Transformada de Fourier.
14
4/6
6/6
Propiedades de la Transformada de Laplace. Linealidad. Escala. Traslación.
Convolución. Desplazamiento. Diferenciación e integración. Teoremas del valor
inicial y del valor final. Transformada de Inversa de Laplace. Resolución de
ecuaciones diferenciales. Aplicación a Sistemas Lineales. Función de
Transferencia. Estabilidad.
Seminario 4
15
11/6
13/6
Diagramas en bloques en la variable “s”. Ejemplos. Solución mediante
Transformada de Laplace. Respuesta transitoria y estacionaria. Aplicación de la
Transformada de Laplace al modelado en variables de estado. Relación con la
Función de transferencia. Estabilidad del sistema. Transformaciones de
semejanza. Transformación de los autovalores.
16
18/6
Clase de repaso.
25/6 Segundo Parcial
2/7 Recuperatorio
Temas de Variable Compleja
9
TEMAS DE VARIABLE
COMPLEJA
Gráfico de la función f(z)=(z2-1)(z-2-j)2/(z2+2+2j).
La coloración representa el argumento de la
función, mientas que el brillo representa el módulo.
Temas de Variable Compleja
10
INTRODUCCIÓN
FUNCIONES ANALÍTICAS
La función w = f(z), definida para los números complejos z=x+jy es analítica en un punto
dado z0 D si la misma es derivable tanto en el propio punto z0 como en un cierto entorno del
mismo.
Es condición necesaria (aunque no suficiente) para la derivabilidad de este tipo de funciones
que se verifiquen las Condiciones de Cauchy-Riemann (C-R), dos ecuaciones diferenciales
parciales básicas en el análisis de funciones complejas de variable compleja.
Recordamos las condiciones de C-R para f(z) =u(x,y)+jv(x,y) : yuxvyvxu ; .
Es condición necesaria y suficiente para que una función f(z) continua sea derivable en un
punto (x,y), que se verifiquen las condiciones de C-R y que las derivadas parciales de u y v
sean continuas en ese punto.
Singularidad : z0 es una singularidad de f(z), si f(z) es analítica en algún punto de cierto
entorno de z0, pero no lo es en el propio punto z0
Decimos que una función es entera, si es analítica en todo el plano z infinito. Por ejemplo, un
polinomio es una función entera.
Una función racional, cociente entre 2 polinomios, es analítica salvo en los valores de z tales
que el polinomio del denominador es cero; esos valores serán puntos singulares de f(z).
0
1
1
0
1
1
.....
.....)(
bzbzb
azazazf
m
m
m
m
n
n
n
n
Singularidad aislada: Si existe cierto entorno de un punto singular 0z de un función f, en todo
el cual f es analítica, excepto en el propio punto, entonces 0z es un punto singular aislado de f.
Otra forma de definirla es la siguiente: f (z) tiene una singularidad aislada en z = 0z si es
analítica en un entorno reducido de 0z .
Tipos de singularidades aisladas: clasificamos a las singularidades como polo, singularidad
esencial o singularidad evitable.
Como determinar la naturaleza de una singularidad
I) Si
f(z)lim0zz
entonces decimos que f(z) tiene un polo en z = 0z .
Para que un punto 0z sea un polo de orden ‘m’ de f(z), es necesario y suficiente que f(z) pueda
expresarse de la forma: m
0 )z(z
φ(z)f(z)
con φ(z)y0)φ(z 0 analítica en 0z .
Similarmente, podemos decir que 0z será un polo de orden ‘m’ si 0k,k.f(z))z(zlimm
0zz 0
II) Si f(z)lim0zz
no existe entonces z = 0z es una singularidad esencial de la función.
III) Si Lf(z)lim0zz
entonces z = 0z es una singularidad evitable.
Temas de Variable Compleja
11
Ejercicios: Analizar los tipos de singularidades en los puntos indicados
1) 00
zenz
zsenf(z) Rta. Singularidad evitable
2) 0zenz
zsen)z(f 03
Rta. Polo de segundo orden.
3) 0zenz
e1)z(f 0
z
Rta. Singularidad evitable
4) 0zene)z(f 0z
1
Rta. Singularidad esencial
5) 0zenz
zcos1)z(f 07
Rta. Polo de quinto orden
CEROS DE UNA FUNCIÓN
Supongamos que la f(z) es analítica en el punto 0z . El punto 0z se llama cero de la función
f(z) de orden ‘n’ si se cumplen las siguientes condiciones:
0)z(f;0)z(f......;;.........0)z(f;0)z(f 0
n
0
)1n(
00
Si n = 1 el punto 0z es un cero simple.
Un punto 0z es un cero de orden ‘n’ de la f(z), que es analítica en el punto 0z , si y sólo si, en
cierto entorno de ese punto se verifica la igualdad:
0)z(yzenanalíticaes)z(donde),z(zz)z(f 00
n
0
Ejercicios
Determinar los ceros de las siguientes funciones y encontrar el orden de los mismos.
1) 3az)z(f Respuesta: 0z = a es un cero de tercer orden
2) ze1)z(f Respuesta: 0z = 2kj es un cero simple
TRANSFORMACIÓN(O MAPEO) CONFORME
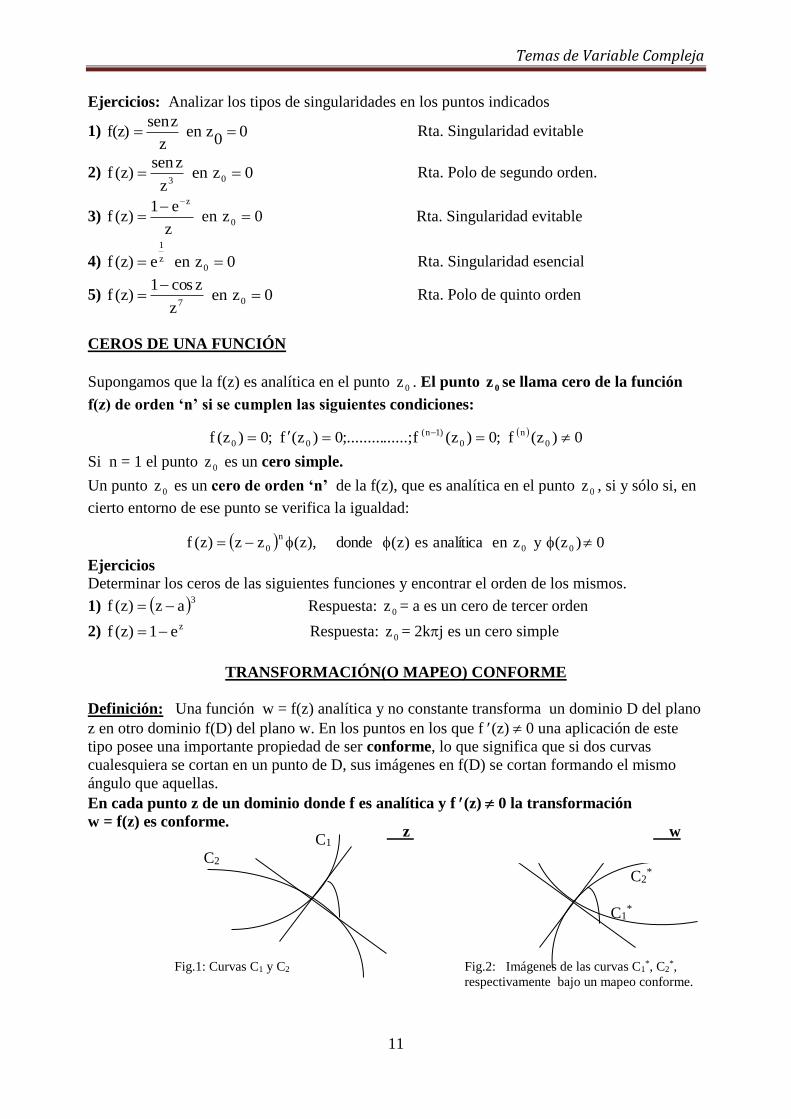
Definición: Una función w = f(z) analítica y no constante transforma un dominio D del plano
z en otro dominio f(D) del plano w. En los puntos en los que f (z) 0 una aplicación de este
tipo posee una importante propiedad de ser conforme, lo que significa que si dos curvas
cualesquiera se cortan en un punto de D, sus imágenes en f(D) se cortan formando el mismo
ángulo que aquellas.
En cada punto z de un dominio donde f es analítica y f (z) 0 la transformación
w = f(z) es conforme. C1 C1
*
C2
C2*
C1*
Fig.1: Curvas C1 y C2 Fig.2: Imágenes de las curvas C1
*, C2*,
respectivamente bajo un mapeo conforme.
z w

Temas de Variable Compleja
12
Se describen a continuación algunos ejemplos de transformaciones conformes.
Transformación lineal
Forma general: w = Az + B; A y B constantes complejas.
a) Si w = z + B ( para A=1)
2
1
21Byv
BxujBBjyxjvu (son las coordenadas de transformación)
Representa una traslación, sin la modificación de la forma, ni orientación, ni tamaño de la
figura.
b) Si w = Az , trabajando en coordenadas polares, obtenemos:
rRree jjj
..Re
Azw
Representa una rotación según (argumento de A) y una magnificación (contracción o
dilatación) de la figura según: .ncontraccióhay1Asi;dilataciónhay1ASiRA
c) w = Az + B (para B≠0) Representa una combinación de rotación con magnificación y
traslación.
Ejemplo 1:
Si se quisiera encontrar la imagen de la siguiente región: 2y0;1x0 , mediante
w = (1+j)z + (2-j) se arribaría a las siguientes conclusiones:
Rotación según arg(1+j) = 4
Magnificación según: dilatación12;2j1
Traslación según (2-j)
Transformación inversa
Forma general: w
1zo
z
1w .
Excepto para z = 0, w = 0 (los que no tiene imagen) se establece una correspondencia uno a uno
En polares:
r
1
re
1e
j
j
Existe una simetría respecto al eje real y además una inversión respecto de la circunferencia de
radio r = 1, o sea:
Si r > 1 < 1 ; si r < 1 > 1.

Temas de Variable Compleja
13
En cartesianas:
z
1w
22
22
yx
yv
yx
xu
jyx
jyx.
jyx
1jvu ,
o bien, para w
z1
puede escribirse:
2222 vu
vy;
vu
ux
Estudiemos la transformación inversa de una familia de circunferencias y rectas
Si (a, b, c, d) R, la ecuación de una familia de circunferencias o rectas (dependiendo de a 0 o
a = 0) en el plano z es:
a(x2+y2) + bx + cy + d = 0
Si se aplica la transformación inversa a los puntos que cumplen con la igualdad de arriba,
tenemos que en el plano w corresponde a:
0dvu
vc
vu
bu
vu
vua
2222222
22
,
y operando se obtiene que
d (u2+v2) + bu – cv +a = 0.
Luego, como la región a(x2+y2) + bx + cy + d = 0 en el plano z resultó en
d (u2+v2) + bu – cv +a = 0 en el plano w,
se concluye que la región transformada resulta también una familia de circunferencias o rectas.
Ejemplos:
2) Transformar x2+y2 - 4x + 2y = 0 mediante la transformación inversa.
Respuesta: v = -2u + 2
1.
3) Hallar analítica y gráficamente mediante la transformación inversa, la imagen de la región rayada: z) j j/2

Temas de Variable Compleja
14
Respuesta:
22
2
22
2
1
2
1vu
11vu
0u
El punto del infinito
Una aplicación de la transformada inversa es que permite encontrar la imagen del punto del
infinito
Notación: z = (Indica que es la imagen de w = 0 bajo la transformación w = z
1)
Analíticamente se considera z
1z pues si z , entonces z 0. Utilizando esta
sustitución se simplifica la tarea en el cálculo de límites.
El punto del infinito recibe el nombre de punto impropio llamado .
El plano complejo más el punto infinito, recibe el nombre de plano complejo extendido, sin
ese punto se llama plano complejo finito.
Ejemplo 4: Transformar el punto z = mediante: 2
2
z1
z4w
. Respuesta: w = 4
Transformación bilineal (o lineal fraccionaria u homográfica)
Forma general: complejas) constantes :dc,b,a,0,bc-addcz
bazw (,
Las transformaciones de este tipo transforman circunferencias y rectas en circunferencias y rectas.
Observar que cuando c0 , la forma general se puede escribir, realizando la división de los
polinomios, como: dcz
1.
c
adbc
c
a
dcz
c
adb
c
aw
.
Haciendo: z= cz+d (A) y z
1z
(B), resulta: z.
c
adbc
c
aw
(C)
Las ecuaciones (A) ,(B) y (C) representan tres transformaciones sucesivas en que se descompo-
ne la transformación bilineal. La primera y la tercera son de tipo lineal y la segunda es inversa.
Hay sólo una transformación bilineal que transforma tres puntos distintos dados:
z1, z2, z3 , en otros tres puntos distintos w1, w2, w3, respectivamente.
Dicha transformación viene dada por la fórmula:
1 2 3 1 2 3
3 2 1 3 2 1
( )( ) ( )( )
( )( ) ( )( )
w w w w z z z z
w w w w z z z z
Demostración:
Supongamos un punto iz del plano Z cuya imagen es iw :

Temas de Variable Compleja
15
ii
i
az bw
cz d
Análogamente para el punto jz :
j
j
j
az bw
cz d
Si restamos ambas expresiones y operamos se obtiene que:
( )( )
( )( )
j i jii j
i j i j
az b ad bc z zaz bw w
cz d cz d cz d cz d
.
Ahora, realizando este procedimiento para " "iw w , 2 3" "w w ,
3" "w w y 2 1" "w w puede
escribirse:
11
2 32 3
2 3
33
3
2 12 1
2 1
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )
( )( )
ad bc z zw w
cz d cz d
ad bc z zw w
cz d cz d
ad bc z zw w
cz d cz d
ad bc z zw w
cz d cz d
Luego, realizando el cociente entre el producto de las dos primeras expresiones y el producto de
las dos últimas, se obtiene la relación buscada:
1 2 3 1 2 3
3 2 1 3 2 1
( )( ) ( )( )
( )( ) ( )( )
w w w w z z z z
w w w w z z z z
.
También, si se reescribe la ecuación del siguiente modo:
321 wwww 3zz 12 zz = 123 wwww 321 zzzz ,
es fácil observar que:
* Si z = z1 entonces el segundo miembro es 0 y w = w1
* Si z = z3 entonces el primer miembro es 0 y w = w3
* Si z = z2 entonces 321 wwww = 123 wwww , de donde:
w (w1-w3) = w2 (w1-w3) , por lo tanto: w = w2
También se puede trabajar con el punto del infinito mediante sustituciones adecuadas con el
paso al límite.
Se denomina punto doble (o fijo) aquel cuya imagen w representa el mismo número.
La transformación tiene como máximo dos puntos dobles representados por las raíces en z,
obtenidas en la ecuación: dcz
bazw
haciendo z = w
Temas de Variable Compleja
16
Ejemplos: 5) Encontrar la transformación que mapea: z1 = 1, z2 = 0, z3 = -1 en los puntos
w1 = j, w2 = 1, w3 = . Respuesta: )1z(
)1j2(z1w
6) Mediante )jz(
)jz(w
, transformar x>0, y>0. Respuesta:
1vu
0v22
7) Hallar la transformación bilineal del círculo z <5 en el círculo w <1, de tal modo que los
puntos z1 = -5, z2 = 4+3j, z3 = 5 se transformen en los puntos w1 = -1, w2 = j, w3 =1.
Respuesta: z10
5z2w
INTEGRACIÓN EN EL PLANO COMPLEJO
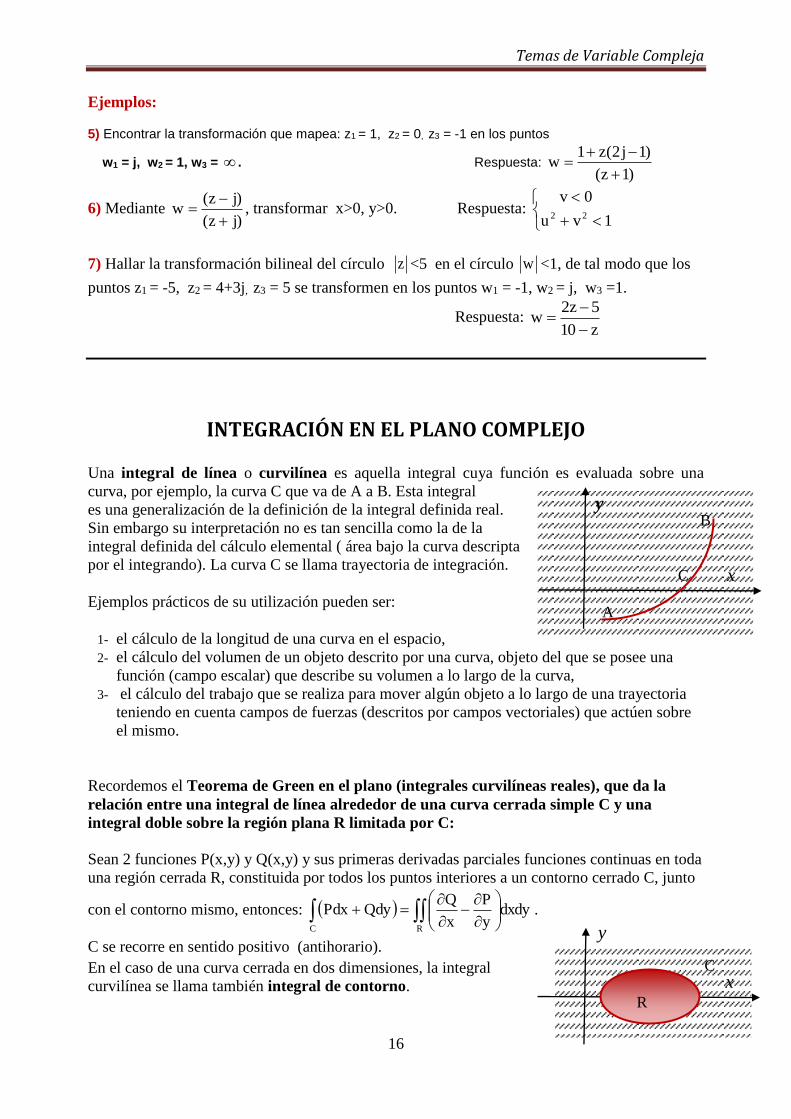
Una integral de línea o curvilínea es aquella integral cuya función es evaluada sobre una
curva, por ejemplo, la curva C que va de A a B. Esta integral
es una generalización de la definición de la integral definida real.
Sin embargo su interpretación no es tan sencilla como la de la
integral definida del cálculo elemental ( área bajo la curva descripta
por el integrando). La curva C se llama trayectoria de integración.
Ejemplos prácticos de su utilización pueden ser:
1- el cálculo de la longitud de una curva en el espacio,
2- el cálculo del volumen de un objeto descrito por una curva, objeto del que se posee una
función (campo escalar) que describe su volumen a lo largo de la curva,
3- el cálculo del trabajo que se realiza para mover algún objeto a lo largo de una trayectoria
teniendo en cuenta campos de fuerzas (descritos por campos vectoriales) que actúen sobre
el mismo.
Recordemos el Teorema de Green en el plano (integrales curvilíneas reales), que da la
relación entre una integral de línea alrededor de una curva cerrada simple C y una
integral doble sobre la región plana R limitada por C:
Sean 2 funciones P(x,y) y Q(x,y) y sus primeras derivadas parciales funciones continuas en toda
una región cerrada R, constituida por todos los puntos interiores a un contorno cerrado C, junto
con el contorno mismo, entonces:
RC
dxdyy
P
x
QQdyPdx .
C se recorre en sentido positivo (antihorario).
En el caso de una curva cerrada en dos dimensiones, la integral
curvilínea se llama también integral de contorno.
x
y
B
C
A
y
x
C
R

Temas de Variable Compleja
17
Integrales de línea complejas
Consideremos una función f(z) = u(x,y) +j v(x,y) la cual es analítica en todos los puntos
interiores y sobre un contorno cerrado C, y es tal que )z(f es continua allí. Se quiere evaluar la
integral curvilínea:
C
f(z)dz
Es fácil ver que las integrales de línea complejas pueden expresarse en términos de
integrales de línea reales, en función de sus componentes. Si se sustituye f(z) = u(x,y) +j
v(x,y) y dz = dx +j dy en la integral y se opera, resulta:
CCCCC
dy)y,x(udx)y,x(vjdy)y,x(vdx)y,x(udz)z(f
TEOREMA DE CAUCHY-GOURSAT
Sea f(z) una función analítica en un dominio simplemente conexo D. Entonces, dado un
contorno cerrado simple C contenido en D, tenemos: C
f(z)dz = 0.
Demostración
Como:
CCCCC
dy)y,x(udx)y,x(vjdy)y,x(vdx)y,x(udz)z(f .
Entonces como f(z) es analítica, u y v y sus derivadas parciales de primer orden son continuas
en la misma región.
Dadas las propiedades de u y v, es posible aplicar el teorema de Green. Entonces, el segundo
miembro se modifica como,
RRC
dxdyy
v
x
ujdxdy
y
u
x
vdz)z(f .
Como se cumplen las condiciones de Cauchy-Riemann, y
u
x
v,
y
v
x
u
entonces el
segundo miembro se anula y resulta: 0f(z)dzC
.
Esta demostración, basada en el teorema de Green, exige que )z(f sea continua en R ya que de
lo contrario no podríamos aplicar dicho teorema. Cauchy obtuvo en 1814 por primera vez este
resultado, valiéndose de una fórmula equivalente ya que Green no había aún explicitado su
teorema. Otra demostración, menos restrictiva, fue formulada a fines del siglo XIX por Goursat,
que no requiere que )z(f sea continua. Estas deducciones se conocen como Teorema de
Cauchy-Goursat, o a veces únicamente como teorema de la integral de Cauchy.
Ejercicio 8: Probar que C
z 0dze para toda trayectoria cerrada.
Temas de Variable Compleja
18
Consecuencias del teorema de Cauchy-Goursat
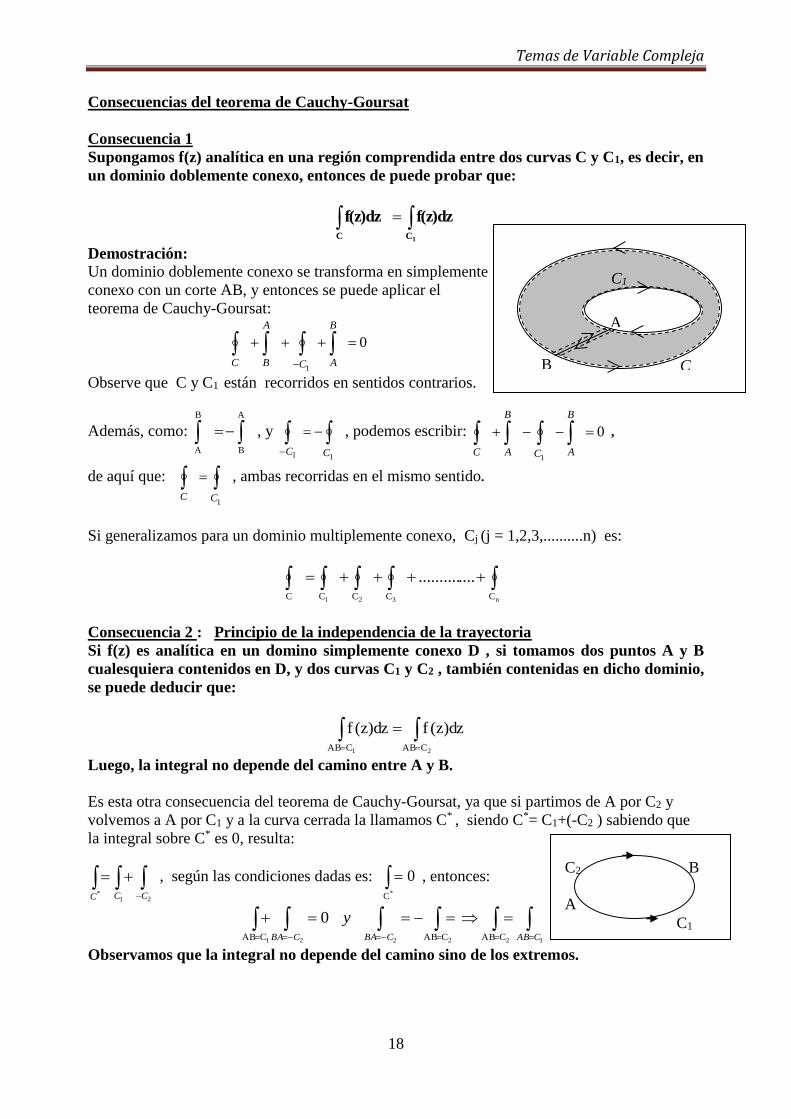
Consecuencia 1
Supongamos f(z) analítica en una región comprendida entre dos curvas C y C1, es decir, en
un dominio doblemente conexo, entonces de puede probar que:
1CC
f(z)dzf(z)dz
Demostración: Un dominio doblemente conexo se transforma en simplemente
conexo con un corte AB, y entonces se puede aplicar el
teorema de Cauchy-Goursat:
0
1
B
AC
A
BC
Observe que C y C1 están recorridos en sentidos contrarios.
Además, como:
A
B
B
A
, y
11 CC
, podemos escribir: 0
1
B
AC
B
AC
,
de aquí que:
1CC
, ambas recorridas en el mismo sentido.
Si generalizamos para un dominio multiplemente conexo, Cj (j = 1,2,3,..........n) es:
n321 CCCCC
..............
Consecuencia 2 : Principio de la independencia de la trayectoria
Si f(z) es analítica en un domino simplemente conexo D , si tomamos dos puntos A y B
cualesquiera contenidos en D, y dos curvas C1 y C2 , también contenidas en dicho dominio,
se puede deducir que:
21 CABCAB
dz)z(fdz)z(f
Luego, la integral no depende del camino entre A y B.
Es esta otra consecuencia del teorema de Cauchy-Goursat, ya que si partimos de A por C2 y
volvemos a A por C1 y a la curva cerrada la llamamos C* , siendo C*= C1+(-C2 ) sabiendo que
la integral sobre C* es 0, resulta:
*
1 2C C C
, según las condiciones dadas es: *C
0 , entonces:
122221 CABCABCAB
0CABCBACBA
y
Observamos que la integral no depende del camino sino de los extremos.
C2 B
A
C1
C
C1
B
A

Temas de Variable Compleja
19
Ejercicio 9:
a) Para z1= 2-2j y z2= 2+2j , calcule 2
1
z
z
f dz (z) , para f(z) =ez
Integral definida: Una integral definida puede calcularse por el incremento que sufre la integral
indefinida, como en el caso de integrales reales: )(F)(Fdz)z(f
, donde los caminos de
integración están contenidos en un dominio simplemente conexo, en el que f(z) es analítica.
RESIDUOS
Definición: Sea f(z) una función analítica en un contorno cerrado C, simplemente conexo y en
todo punto del interior de C, salvo 0z . Se denomina residuo de la función f(z) en una
singularidad aislada z = 0z al número definido por:
Czz
dzzfj
zfs )(2
1)(Re
0
Toda función tiene un residuo en cada uno de sus puntos singulares aislados.
Sin embargo, el valor del residuo puede ser cero.
Recuerde que si z0 es un polo simple, entonces 0zz
(z)f(z)
, con (z) analítica y ( 0z ) 0 .
Puede probarse que )()(lim)(Res0
00zzzz
zf(z)zzzf0
(Por la Fórmula de la Integral
de Cauchy (se verá mas adelante)).
Además, si z0 es un polo múltiple, m0zz
(z)f(z)
y
)!1(
)()(Res
)1(
0
m
zzf 0
m
zz
.
Más adelante se demostrará que si 0z es un polo simple de f(z), y si
)z(Qy)z(P,)z(Q
)z(P)z(f analíticas en 0z y 0)(0)(;0)( 000 zQyzQzP ,
entonces el residuo es también )(z
)(zf(z)
zz0
0
Q
PRes
0
.
Ejercicio 10: Determinar el residuo de la siguiente función 2
32)(
2
z
zzzf en sus
singularidades. ( Rta: 3f(z)Re2
z
s ).
jy
2
j2
-j2
x

Temas de Variable Compleja
20
TEOREMA DE LOS RESIDUOS
El Teorema de los residuos es consecuencia directa del Teorema de la integral de
Cauchy y forma parte fundamental de la teoría matemática de Análisis Complejo.
Sea C una curva cerrada en el plano complejo tal que la función f(z) es analítica en el
interior de C y sobre C, excepto en un número finito de puntos singulares aislados
m21 ...z,.........z,z interiores a C. Si m21 ...k,.........k,k representan los residuos de f en
aquellos puntos se tiene que:
m
1izz
C
f(z)Res j2f(z)dzi
Demostración:
Encerramos a cada uno de los puntos singulares zi en un círculo Ci con
radio pequeño para que queden separados todos esos ‘m’ círculos y C.
Entonces f(z) es analítica en el dominio multiplemente conexo
limitado por C1, C2,...........,Cm y sobre la frontera.
De acuerdo con la primera consecuencia del teorema de Cauchy-Goursat se concluye que:
mCCCC
dzzfdzzfdzzfdzzf )(...........)()()(
21
Como: 12)(
1
jkdzzfC
; 22)(
2
jkdzzfC
; ............... m
C
jkdzzf
m
2)( ,
entonces:
m
izz
m
C
zfsjkkkjdzzfi1
21 )(Re2)...........(2)( .
Ejercicio 11: Resolver las siguientes integrales aplicando el teorema de los residuos.
a)
2zC
2
3
dz)9z)(1z(
2z3 Rta. j ; b)
2zC
3 )4z(z
dz , Rta. j
32
c) 4zC
zsh
dz, Rta. - 2j .
FÓRMULA DE LA INTEGRAL DE CAUCHY
Sea (z) analítica (y unívoca en un domino simplemente conexo) en todos los puntos
interiores y sobre un contorno cerrado C; si z0 es cualquier punto interior a C se tiene
C
dzzz
(z)
j2
1)(z
0
0
,
donde la integral se toma en sentido positivo alrededor de C.
C1 C2
C3 Cm
C
z1
z2
zm z3

Temas de Variable Compleja
21
La fórmula muestra que el valor de la función, que es analítica en una región, está determinado
en toda la región por sus valores sobre el contorno.
Demostración:
Sea C0 una circunferencia con centro en 0z tal que 000 ryrzz lo suficientemente
pequeño para que C0 sea interior a C.
La función 0
)(
zz
z
es analítica en todos los puntos interiores y sobre C, excepto en el punto 0z .
Por lo tanto la integral alrededor del contorno de la región anular entre C y C0 es cero, y según
la primera consecuencia del teorema de Cauchy-Goursat:
dzzz
zdz
zz
z
CC
0 00
)()( , donde ambas integrales se toman en sentido positivo.
Utilizando un artificio en el segundo miembro:
0 0
00
0
)()()()(
CC
dzzz
zzzdz
zz
z
Entonces: (A)
III
dzzz
zz
zz
dzzdz
zz
z
CCC
00 0
0
0
0
0
)()()(
)(
Analizamos cada una de las integrales I y II.
Sea j
00 erzz y jdθerdz jθ
0 , entonces I:
2
0
2
0j
0
j
0
C 0
j2jder
jer
zz
dz
0
.
Para II: Se toma el valor absoluto y se tiene en cuenta que es continua en 0z , entonces:
00 )()(/0)(,0 zzparazz .
En particular 00 rzz , interior a C.
022)()()()(
0
000
0
0
0
000
r
rdz
rdz
zz
zzdz
zz
zz
CCC
Puesto que el número puede ser tan pequeño como se desee, el valor absoluto de la integral
también puede hacerse arbitrariamente pequeño. Reducir equivale simplemente a reducir el
radio de C0.
Reemplazando en (A), resulta:
02).()(
0
0
jzdzzz
z
C
C
dzzz
(z)
j2
1)(z
0
0
Ejercicios:
12) Calcular :
C
2
2
dz1z
1z a lo largo del círculo de radio 1 con centro en a, para:
a) a = 1 (Rta. 2j) c) a = -1 (Rta. -2j)
b) a = 2
1 (Rta. 2j) d) a = j (Rta. 0)
z0
z C0
r0
C

Temas de Variable Compleja
22
13) a) Calcule C
dz1z
zcos, donde C es el contorno
triangular mostrado en la figura.
b) Calcule C
dz1z
zcos, donde C es
el mismo contorno que en el apartado a).
14) a) Reconsidere la función del Ej 12) y Calcule la integral a lo largo del círculo de radio
2 con centro en 0. Discuta el resultado en relación al obtenido en 12-d). (Rta. 0).
b) Considere ahora la curva C como en 14-a) pero para integrar 2 nuevas funciones:
)1()(
21
z
zzf ,
zz
zzf
)1(
13)(
2
2
.
c) Calcule
4zC
dz)3z)(2z)(1z(
1z2 (Rta. 0)
Fórmula de la derivada de la integral de Cauchy
Si la función (z) es analítica en un recinto D y en su frontera C, entonces para cualquier
número natural n se verifica la fórmula:
CzDzdondeC
n
,)
01dz
z(z
(z)
j2
n!)(z
0
0
(n)
Se puede demostrar partiendo de la fórmula de la integral de Cauchy y derivando respecto de
0z ; cuando se llega a )(' 0z se reitera el proceso y por inducción se llega a lo que se quería
demostrar y concluir: Si una función es analítica en un punto entonces sus derivadas de
todos los órdenes ´, ´´,................; son también analíticas en aquel punto.
Ejercicios:
15) a) Calcular dz)1z(
e
2zC
3
z2
; (Rta. 4e2j) ; b) Calcular
2zC
3dz
)1z()1z(
zch;
e2
j.Rta .
________________________________________________________________________________
2
2j
-2j
x
jy

Temas de Variable Compleja
23
SERIES. POLOS Y RESIDUOS
Revisemos previamente los siguientes temas:
Series de potencias
Una serie de potencias en z = a es una serie infinita de la forma:
0n
n
n
2
210
n
n ...........)az(c...............)az(c)az(cc)az(c
donde z es la variable; c0, c1,...................,cn son los coeficientes y a una constante que recibe el
nombre de centro de la serie.
En particular si a=0, se obtiene una serie de potencias en z :
0n
n
n zc
La región de convergencia se determina con un círculo de centro a y radio R, tal que en
Raz la serie es convergente y si Raz es divergente. El círculo Raz se llama
círculo de convergencia y su radio recibe el nombre de radio de convergencia.
El radio se calcula, por medio de los coeficientes de la serie, n
1n
n c
climL
y según la fórmula
de Cauchy-Hadamard: L
1R .
Si L = 0 R = la serie converge para todo z.
Si L = R = 0 la serie converge en z = a
Ejercicios 16:
a)
1n
n
n
z Respuesta: R = 1 y 1z ; b)
1nn
n
2
nz Respuesta: R = 2 y 2z
Series de Taylor
Sea f(z) analítica en todos los puntos interiores a una circunferencia C0 con centro en z0 y
radio R. En cada punto z interior a C0:
n
n
0
(n)2
0
0
000 R)z(zn!
f.................)z(z
2!
)(zf)z)(z(zf)f(zf(z)
.
Luego, la serie infinita converge a f(z) si Rn 0 cuando n .
La convergencia está garantizada si f es analítica en el interior de C0.
La RC definida es siempre una región abierta. El radio R es la distancia desde el punto z0 hasta
el punto singular de f que esté más próximo a z0, ya que la función es analítica en todos los
puntos interiores a C0.
Temas de Variable Compleja
24
Ejercicio 17
a) Determinar el radio de convergencia de la serie de Taylor para z1
1)z(f
siendo z0 = j
(Respuesta: 2R ).
b) Desarrollar )z(f 3z
2
en potencias de “z-1”
Solución para el inciso b) :
Si se trabaja algebraicamente con f(z) puede escribirse que:
f(z)
2
)1(1
)1(
2
)1(1)2(
2
2)1(
2
zzz (I)
Ahora, recodando la serie geométrica para q=2
)1( z la forma (I) es el valor de
convergencia de la serie f(z)
nz
2
)1()1( para 1
2
)1(
z.
Así, pudo encontrarse la serie de Taylor buscada:
f(z)
0
)1(2
1)1(
n
n
n
z , válida para 2)1( z .
Desarrollos en serie más utilizados:
1) Serie binomial:
!n
)1n)........(1(
n,1
0donde;1z,z
n)z1(
0n
n
Casos particulares:
1-1) ..............1)1(1,)1(1
1 321
0
zzzzózzz n
nn
1-2) ..............1))(1(1,)(1
1 321
0
zzzzózzz n
n
1-3) 1z...,..........!3
z)2m)(1m(m
!2
z)1m(mmz1)z1(
32m
2)
z,
)!1n2(
z)1(zsen
1n
1n21n
3)
z,)!n2(
z)1(1zcos
1n
n2n
4)
z,!n
z1e
1n
nz

Temas de Variable Compleja
25
Si una función f no es analítica en z0, no podemos aplicar el teorema de Taylor en ese punto.
No obstante, muchas veces es posible hallar una representación de f(z) en forma de una serie
que contiene tanto potencias positivas como negativas de z-z0 .
Es la denominada SERIE DE LAURENT
Teorema
Sea f(z) una función analítica en el anillo 102 rzzr centrado z0 . Sea C cualquier
camino cerrado simple, orientado positivamente, que rodea a z0 y está contenido en ese
dominio anular. Entonces, en cada punto z de esa región, f(z) está representada por una
serie convergente de potencias positivas y negativas de 0z-z , llamada SERIE DE
LAURENT:
(1))z(z
b)z(zaf(z)
1nn
0
n
0n
n
0n
102 rzzr C1
donde:
C
n(2)....)0,1,2,....(ndz
z(z
f(z)
j2
1a
0
n 1)
(3)...)1,2,......(ndzz(z
f(z)
j2
1b
0
n
C
n 1)
En general, obtendremos los coeficientes de la serie de Laurent por métodos prácticos y no por
las fórmulas (2) y (3).
Ejemplo: Desarrolle )3/(1)( zzf en serie de Laurent en potencias de (z-1) y determine el
dominio en el que la serie converge a f(z).
Observaciones:
I) El desarrollo (1) se escribe con frecuencia como
n
n
n
n zzAzf )()( 0 , donde :
C
1n
0
n )2,........ 1, 0,(ndz)z(z
f(z)
j2
1A
.
Llamamos zona intermedia a los puntos de la región 102 rzzr , en los que la serie
contiene tanto potencias positivas como negativas.
C2
r1
r2
z z0
C
jy
x

Temas de Variable Compleja
26
II) En el caso en que f sea analítica en todo punto sobre interior a C1, excepto z0, el radio r2
puede tomarse arbitrariamente pequeño. Así el desarrollo (1) es válido cuando 10 rzz0 .
La llamaremos zona cercana.
III) Si f es analítica en todos los puntos interiores a C1, la integral sobre C definida en la ec(3)
es igual a cero (por T. de C-G) y la serie (1) se reduce a una serie de Taylor. ( 01n y el
integrando es función analítica en z ) .
IV) En particular
1nn
0
n
zz
b)z(f es válido en 10 rzz . La llamaremos zona lejana.
Observamos que fuera de la corona circular, f(z) se podrá representar por una serie que tiene
solo una de las sumatorias de (1).
La serie de Laurent de una función analítica dada f(z) en su anillo de convergencia es
única. Sin embargo f(z) puede tener diferente serie de Laurent en dos anillos del mismo
centro.
Una serie potencial representa una función analítica en todo punto interior a su círculo de
convergencia.
Ejercicios:
18) Hallar todas las series de Laurent de )2z)(1z(
1)z(f
con centro en 0z = 0.
Respuesta: a) 1zenválidaz2
z
2
1)z(f
0n
n
n
b)
0n
1n
n
2zenválidaz
21)z(f
c) 2z1envalida2
z
z
1)z(f
0n1n
n
1n
19) Encontrar todas las series de Laurent de 2z1
1)z(f
con centro en 0z =1.
Respuesta: a) 210enválida2
1)1(
)1(2
1)(
0
zz
zzf
n
n
n
b)
02
21enválida1
2)1(.
)1(
1)(
n
n
n zzz
zf

Temas de Variable Compleja
27
SINGULARIDADES y RESIDUOS DE UNA FUNCIÓN y LA SERIE DE LAURENT
Cuando 0z es un punto singular aislado de f, existe un número positivo 1r tal que la
función es analítica en cada punto z para el cual 10 rzz0 y en este dominio la
función está representada por la serie de Laurent:
1nn
0
n
0n
n
0n)z(z
b)z(zaf(z)
A la última serie se la llama parte principal de f(z) en el entorno de 0z .
Tipos de singularidades aisladas. Relación con la serie de Laurent.
a) Decimos que una función tiene un polo de orden ‘m’ en el punto 0z , si la parte principal
de su desarrollo de Laurent alrededor del punto singular 0z contiene hasta un número finito
‘m’ de términos. Entonces, como puede observarse en las expresiones (3), los coeficientes
........,.........b,b 2m1m , son todos nulos. Por consiguiente su desarrollo de Laurent es:
m
0
m
-1m
0
-1m
2
0
2
0
1
0n
n
0n)z(z
b
)z(z
b
)z(z
b
)z(z
b)z(zaf(z)
........... , mb 0
Si m = 1 el polo es simple.
b) Decimos que el punto 0z es un punto singular esencial de la función, si la parte principal
contiene un número infinito de términos.
c) Si la Serie de Laurent carece de parte principal, y la función no es analítica en 0z pero
puede hacerse analítica utilizando una adecuada definición de la misma, entonces el punto 0z es
un punto singular evitable.
Se había visto que la naturaleza de una singularidad se podía determinar analizando el
límite:
I) Si f(z) tiene un polo en z = 0z entonces
f(z)lim0zz
. También puede afirmarse que
para que un punto 0z sea un polo de orden ‘m’ de f(z), es necesario y suficiente que
f(z) pueda expresarse de la forma: m
0 )z(z
φ(z)f(z)
con φ(z)y0)φ(z 0
analítica en 0z . (A)
II) Si f(z)lim0zz
no existe entonces z = 0z es una singularidad esencial de la función.
III) Si Lf(z)lim0zz
entonces z = 0z es una singularidad evitable.
Ahora estamos en condiciones de probar la propiedad I) la que resulta del siguiente
Teorema: 0z es un polo de orden ‘m’ de f(z) si y sólo si existe: 0k,k.f(z))z(zlimm
0zz 0
,
es finito y no nulo.

Temas de Variable Compleja
28
Demostración: Sea, )rzz( 100 .f(z))z(zφ(z) m0 definida en un entorno reducido
de 0z y analítica en 0z . Sustituyendo a f(z) por su desarrollo de Laurent, considerando la
existencia de un polo, resultará que:
(B) 0b,)zz(b................)zz(bb)z(za(z) m
1m
0101mm
0n
mn
0n
Si 0zz entonces kbz m )( 0 . Entonces (B) es válida en todo entorno de 0z y en el
propio punto.
Por ser (B) una serie de potencias convergente, la función )z( es analítica en 0z . En
consecuencia se puede escribir:
m
m
0zz
0 b.f(z))z(zlim)(z0
puesto que existe y 0bm se deduce que:
)z(flim0zz
RESIDUOS. Relación con la Serie de Laurent
Recordamos la definición:
Sea f(z) una función analítica en un contorno cerrado C, simplemente conexo y en todo punto
del interior de C, salvo 0z . Entonces el residuo de f(z) en 0z , está definido por:
Czz
dz)z(fj
)z(fsRe2
1
0
,
Observar que de acuerdo a las definiciones de los coeficientes en el desarrollo de Laurent,
(pag. 25), según (3) diremos que
10
b)z(fsRezz
.
Entonces el residuo de una función f(z) en el punto singular aislado 0z , es el coeficiente de
la potencia 1
0 )zz( en el desarrollo de Laurent.
Toda función tiene un residuo en cada uno de sus puntos singulares aislados. La serie de
Laurent alrededor del punto representa la función en todo entorno del punto, excepto en el
propio punto.
Ejercicio 20 Determinar el residuo de cada una de las siguientes funciones en sus respectivas singularidades.
1) 4
2)(
2
z
zzf Rta.
2) 2z
1
e)z(f Rta. 0
3) 2
z
)1z(
e)z(f
Rta. –e-1
Temas de Variable Compleja
29
CÁLCULO DE RESIDUOS
Es posible determinar el valor de un residuo, a partir de diferentes fórmulas, la mayoría de las
cuales ya se han presentado en este capítulo. Se presenta un breve resumen y algunas
deducciones interesantes en lo que sigue.
A) Para polos simples
A-1) Como m
m
0zz
b.f(z))z(zlim0
, si m = 1 entonces .f(z))z(zlimb 0zz
10
Demostración: Al ser z = 0z un polo simple, la serie de Laurent correspondiente es de la
forma:
0b,rzz0con)zz(
b)z(zaf(z) 10
0
1
0n
n
0n
.
Si multiplicamos ambos miembros por (z- 0z ), resulta:
(z- 0z ).1
0n
1n
0n b)z(zaf(z)
Aplicando límite obtenemos que: )f(z)z(zlimbf(z)Res 0zz
1zz 00
A-2) Si )z(Qy)z(P,)z(Q
)z(P)z(f analíticas en 0z y 0)z(Qy0)z(Q;0)z(P 000 ,
entonces el residuo es de la forma: )(zQ
)P(zb
0
0
1
.
Demostración : Si Q(z) es analítica en z = 0z se puede desarrollar en serie de Taylor,
entonces aplicando la regla A-1) resulta:
.............!2
)zz)(z(Q)zz)(z(Q)z(Q
)z(P).zz(lim)z(fsRe
2
00
000
0zzzz 00
Sabemos que
0)z(Q 0 y 0)z(Q 0 , por lo tanto es:
...............!2
)zz)(z(Q)z(Q)zz(
)z(P).zz(lim)z(fsRe
00
00
0zzzz 00
y pasando al límite :
)(zQ
)P(zbf(z)Res
0
0
1zz 0
B) Para polos de orden superior
Sea f(z) una función que tiene un polo de orden ‘m’ entonces 0bm y el desarrollo de la serie
de Laurent es de la forma:
..................)zz(aa)z(z
b.................
)z(z
b
)z(z
bf(z) 010
0
1
1-m
0
1-m
m
0
m

Temas de Variable Compleja
30
Si se multiplica a ambos miembros por m
0 )zz( y se construye una función auxiliar analítica
en 0z que denominamos )z( se obtiene:
.............)zz(a)zz(b.........)zz(bb)z(f.)zz()z( m
00
1m
0101mm
m
0
(I)
Pero (I) es el desarrollo de Taylor de )z( en 0zz donde los coeficientes vienen dados por la
fórmula:
..........)zz()!1m(
)z(.......................)zz)(z()z()z( 1m
0
0
1m
000
(II)
(I) y (II) representan el mismo desarrollo, que es único; en consecuencia, comparando
coeficientes, resulta:
.f(z))z(z(z)con;1)!(m
)(zb
m
0
0
1)(m
1
C) Para singularidades esenciales
No hay fórmulas para el cálculo de los residuos de la función en puntos singulares esenciales.
Se evalúan siempre encontrando la Serie de Laurent.
Ejercicio 21
Determinar el residuo de cada una de las siguientes funciones en sus respectivas singularidades.
1) 1z
1)z(f
4 Rta.
4
9j
zze
4
1)z(fsRe
1
,
4
9j
zze
4
1)z(fsRe
2
,
4
3j
zze
4
1)z(fsRe
3
,
4
3j
zze
4
1)z(fsRe
4
2) zz
z34)z(f
2
Rta. 4)z(fsRe
0z
, 1)z(fsRe
1z
3) 2
3
z
1sen.z)z(f Rta. 0)z(fsRe
0z
Análisis en el dominio natural
31
ANÁLISIS DE SEÑALES
y SISTEMAS
EN EL DOMINO NATURAL
(TEMPORAL; ESPACIAL)
Análisis en el dominio natural
32
ANÁLISIS DE SEÑALES EN EL DOMINIO NATURAL
Introducción
Una señal es la abstracción de una cantidad medible, y será así representada por una
función de una o más variables independientes. Puede también interpretarse a una señal como
una perturbación (cambio en su estado) que experimenta un medio. Lo relevante de una señal es
que este cambio puede desplazarse. Según la naturaleza del cambio es posible distinguir
diferentes dominios de propagación. Una señal puede expresarse en diferentes dominios;
cuando se expresa en el dominio del tiempo se habla de propagación y se aplican, al menos
aproximadamente, los conceptos de la cinemática. Además de este dominio puede haber otros,
como el dominio del espacio, el de las frecuencias etc. Es evidente que una señal tiene como
una de sus propiedades relevantes la capacidad de comunicar y /o transmitir información. La
información a que nos referimos podría ser también la respuesta de un sistema a una
solicitación. Las perturbaciones pueden ser de diferente índole, por ejemplo, las señales de radio
son perturbaciones electromagnéticas que se propagan en el espacio. En este caso se trata de un
estado de tensión eléctrica del medio que se propaga. Las señales acústicas son perturbaciones
de presión que se propagan en un medio material. Las señales telegráficas son perturbaciones
eléctricas que se propagan a través de un conductor etc.
Se podría afirmar que el mundo moderno está repleto de señales, la mayor parte de ellas
no es posible percibirlas con los receptores de que está dotado el Hombre en forma natural y
muchas, aún captadas con ayudas creadas por la inventiva del ser humano, necesitan ser
analizadas para obtener información útil de ellas. De eso trata el análisis de señales. Esta
disciplina es un conjunto de ideas y recursos que permiten la interpretación de las señales
naturales o artificiales que inundan nuestro universo. Los recursos son de dos tipos, unos que
modifican las señales para su interpretación y otros que las toman y las ponen de forma que
resulten evidentes sus principales características. En este curso daremos una introducción a la
primera parte de estas técnicas, es decir, aprenderemos a analizar señales para obtener de ellas la
información que nos interesa.
Desde tiempos muy antiguos los seres humanos han empleado señales de diferentes tipos
para comunicar acontecimientos importantes o dar voces de alarma. Como ejemplos podemos
citar:
Haces luminosos que empleaban los griegos y romanos para fines militares
Señales de humo tradicionalmente empleadas por indios para enviar mensajes.
Señales acústicas de tambores para comunicarse en sitios de difícil acceso
Señales producidas por faros para guía de barcos y comunicación de noticias.
A fines del siglo dieciséis, Inglaterra empleó un sistema de faros para alertar sobre la
proximidad de la armada Española, en esa época se acuñó el término de “señal” para denotar un
signo o noticia perceptible por el oído o la vista, destinada a advertir, transmitir una información
o comunicar alguna noticia. En el año 1806, el sistema de semáforos (del griego: “portador de
señales”) estaba en Inglaterra tan perfeccionado, que era posible transmitir una señal desde
Plymouth a Londres obteniendo una confirmación en tan solo tres minutos. En el año 1852,
Morse inventó un código el que junto a la invención del telégrafo produjo un gran avance en las
comunicaciones tanto desde el punto de vista de su rapidez como el de su confiabilidad.
Análisis en el dominio natural
33
Las señales de radar comienzan a ser aplicadas durante la segunda guerra mundial
para detectar aviones y alertar sobre la posibilidad de bombardeo. El sonar, inventado por
Langevin (1917) permitió aplicar señales acústicas a los sistemas de detección de
submarinos. Estas señales, atraviesan una porción del espacio, cuyas condiciones cambian
de forma azarosa perturbándolas e impidiendo, a veces, que estas cumplan con los objetivos
para los que fueron generadas. Esta circunstancia hizo que se desarrollara la teoría de
señales desde el punto de vista de su generación, mejorando la electrónica asociada para
hacer las señales más robustas y desde el punto de vista de la detección, se desarrolló la
herramienta estadística para buscar las características relevantes de la información que
llegaba alterada a los sistemas de detección.
En el área de las comunicaciones, la misión de la teoría de señales cumple múltiples
propósitos: debe mejorar su generación para hacerlas inmunes a las perturbaciones del
medio, facilitar su recuperación e incluso hacer que la transmisión de éstas sea más
económica.
Para físicos e ingenieros las señales tienen además un propósito no menos importante
que los anteriores. En muchas oportunidades aplicamos señales para estudiar un fenómeno
de la naturaleza. En este caso lo relevante es que la señal es modificada por el fenómeno que
se estudia y aquí el énfasis no se hace en evitar que la señal se distorsione sino en que la
distorsión de ésta sea originada por el fenómeno relevante que nos interesa estudiar.
Entonces, resulta de gran importancia tener información acerca del mecanismo de distorsión
de la señal generada. En este último caso tiene un significado considerablemente más
general que en los anteriores y una señal puede ser un proyectil cuya trayectoria se altera por
la presencia de un obstáculo, o una modificación en la amplitud y en el contenido de
frecuencia de una onda que se hace incidir sobre una zona afectada por un fenómeno
determinado, como una turbulencia, por ejemplo.
Para fines de investigación las señales las generamos mediante dispositivos que
transforman el fenómeno de interés en tensiones eléctricas. Un sistema que transforma
señales de un tipo en otras se llama un “transductor” .Hay tantos transductores como las
interacciones que gobiernan su capacidad de transformación, así tenemos transductores
eléctro-dinámicos (un buen ejemplo de estos son los parlantes de las radios), magnéticos,
electro magnéticos, piezoeléctricos, termo-eléctricos, etc.
Las señales, desde el punto de vista temporal se pueden dividir en “continuas” y
“discretas”, y ambas pueden ser periódicas o no periódicas. En este curso nos ocuparemos de
señales continuas.
En la próxima sección describimos las señales periódicas y sus principales
características, la mayoría de las cuales nos son familiares: período, amplitud, forma de
onda. También consideraremos señales no-periódicas, más ligadas a eventos no repetitivos;
no son tan fáciles de describir, sin embargo, basándose en la forma en que éstas se
despliegan en el tiempo, es posible dar algunas de sus más importantes características.

Análisis en el dominio natural
34
Descripción de señales
Señales periódicas:
Una señal periódica, es aquella que se repite a sí misma, cada cierto intervalo de tiempo
T (período). Así, el Período de la señal es el tiempo que tarda la señal y su derivada en
adquirir el mismo valor.
Nuestra capacidad de analizar señales se ve considerablemente fortalecida si las
expresamos como relaciones matemáticas, así podemos beneficiarnos de la potencia de
esta disciplina para el análisis de sus propiedades. Cuando esto es posible, se facilita
significativamente la obtención de la información que las señales contienen. Como un
primer ejemplo consideremos alguna de las propiedades elementales de las señales
periódicas.
Si una señal se puede expresar como una función periódica del tiempo y su período es
T, cumple los siguientes teoremas:
a) Si f(x) es periódica con período T; f(x)=f(x+T), además mT también es un período
de la misma función (f(x)=f(x+mT)), con m= 1,2,3...
Demostración:
Sea:
f (x + mT) = f (x+T) = f(x) con m = 1, entonces, si m=2:
xfTxfTTxfTxf 2 , si m=n
f(x+nT)=f({x+[n-1] T}+T)=f(x+[n-1] T)=f({x+[n-2] T}+T)+.....etc.
b) Si f(x) es periódica y tiene período T ; entonces f(ax) tiene periodo
a
T
Demostración:
Sea: g(x) = f(ax)
Es evidente que g(x) es periódica, entonces, supongamos que es el periodo de g(x),
luego, g(x)=g (x+) y f(ax)= fa (x+ ) ,luego f(ax)=f(ax+a), entonces a es el
período de f(ax) por tanto: a = mT =a
mT
.
c) Si g(x) es periódica de período T1 y f(x) es periódica de período T2, entonces si
existe un valor T=a T1 =bT2, con a/b un número racional, una nueva función y(x)
definida como la suma de las anteriores,
y(x)= f(x)+g(x) , será periódica , de período T.
Señales no periódicas:
Una señal no periódica o aperiódica, es aquella para la cual no existe un T que
satisfaga la condición f(t)=f(t+T) , t .

Análisis en el dominio natural
35
Hay señales no periódicas definidas para intervalos finitos de t , y otras no-
periódicas definidas t . Se analizará más adelante que las primeras pueden
representarse en términos de señales periódicas.
Valores medios
En ciertas oportunidades resulta muy útil describir las señales, periódicas o no, mediante
un número limitado de parámetros que reflejan magnitudes más fáciles de interpretar
desde el punto de vista físico, los que están relacionados más bien con las propiedades
que las funciones tienen en promedio. Ejemplos de estos se listan a continuación:
Valor medio o valor promedio, magnitud que es muy familiar en su forma discreta:
N
i
xiN 1
1f , donde
ixf es el valor de cada muestra de la señal, y N el número de muestras
de la señal. Cuando se trata de una señal continua esta expresión se transforma en la
bien conocida expresión para el valor medio de una señal continua f(x) definida en a x
b,
xdxf
abf
b
a
1,
la que es conceptualmente idéntica a la anterior,.
Cuando se quiere hacer un estudio de las variaciones de una señal en el tiempo, es
posible que su valor medio se anule por causa de las fluctuaciones, en este caso es más
conveniente emplear el llamado “valor RMS” de la señal, sigla que significa “valor
cuadrático medio” (root mean square). El valor RMS de una señal f(t) tiene por
expresión:
dttfT
T
0
21
También puede interesar el valor absoluto promedio de la magnitud de una señal,
idéntico conceptualmente al anterior, que está dado por:
T
dttfT
0
)(1
Señales de energía vs. Señales de potencia
Recordemos que si f(t) es una señal definida en (t1,t2), su energía se define:
2t
1t
2dttfE . (1.a)
Para la señal f(t) definida en , , decimos que su energía es:
L
Ldttf
L
2limE (1.b)
Análisis en el dominio natural
36
Entonces, una señal tiene energía finita si E . En ese caso, caracterizaremos a f(t)
como una señal de energía.
Ejercicio: Calcular la energía de la señal:
0t,ae
0t,0tf
bt;
Rta: bsib
aE
2
2
Recordemos que si f(t) es una señal en el intervalo (t1 , t2) , o si es periódica de período
T, entonces la potencia media de f(t) se define, respectivamente, como :
2
1
2
12
1t
t
dttftt
Pm
Tt
t
dttfT
Pm0
0
21.
Por otro lado, interesa también caracterizar a ciertas señales como señales de potencia.
Diremos que la señal f(t), definida en , , es una señal de potencia si:
L
LL
dttfL
2
2
1lim0 (2)
Una señal es de energía o es de potencia en , ; no puede ser ambas.
Puede probarse también que toda señal periódica es siempre una señal de potencia,
y que toda señal acotada, de las llamadas “pulso”, es siempre de energía.
Hay señales que no pertenecen a ninguna de las familias anteriores, que son las de
potencia infinita (Cuando (2) = ).
Ejercicio: Probar que la señal atetf con t , no es una señal de energía ni
de potencia.
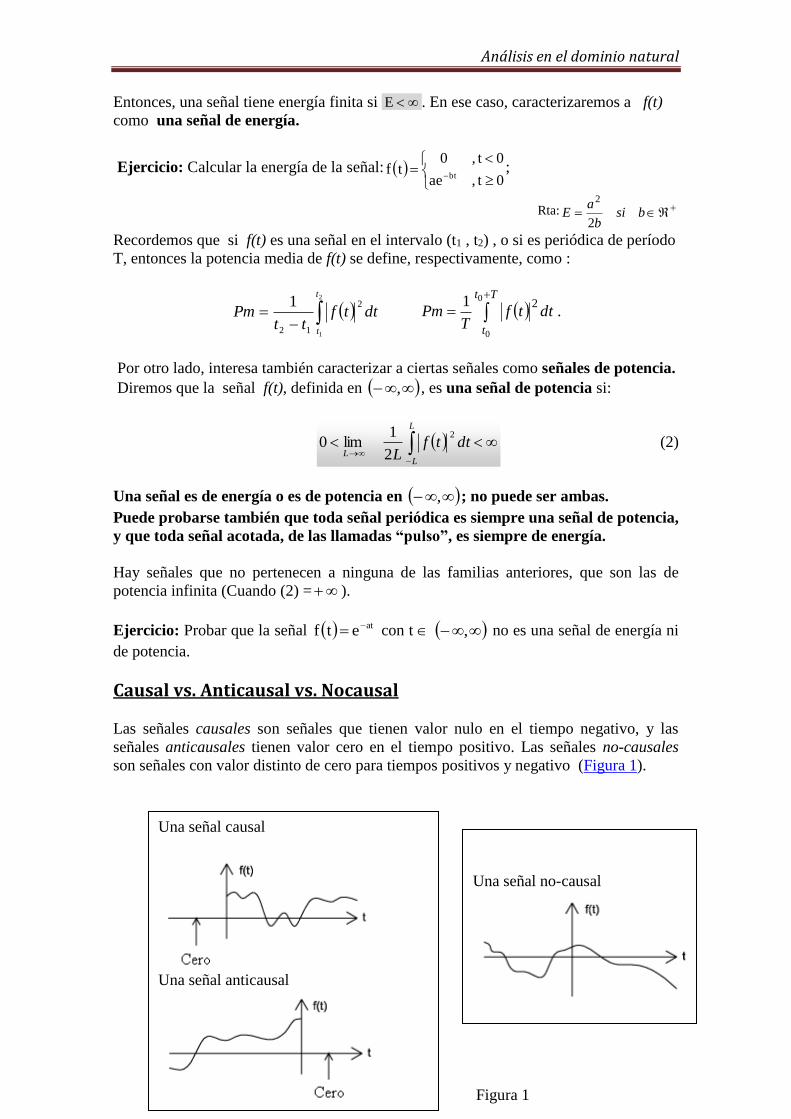
Causal vs. Anticausal vs. Nocausal
Las señales causales son señales que tienen valor nulo en el tiempo negativo, y las
señales anticausales tienen valor cero en el tiempo positivo. Las señales no-causales
son señales con valor distinto de cero para tiempos positivos y negativo (Figura 1).
Una señal causal
Una señal anticausal
Una señal no-causal
Figura 1
Análisis en el dominio natural
37
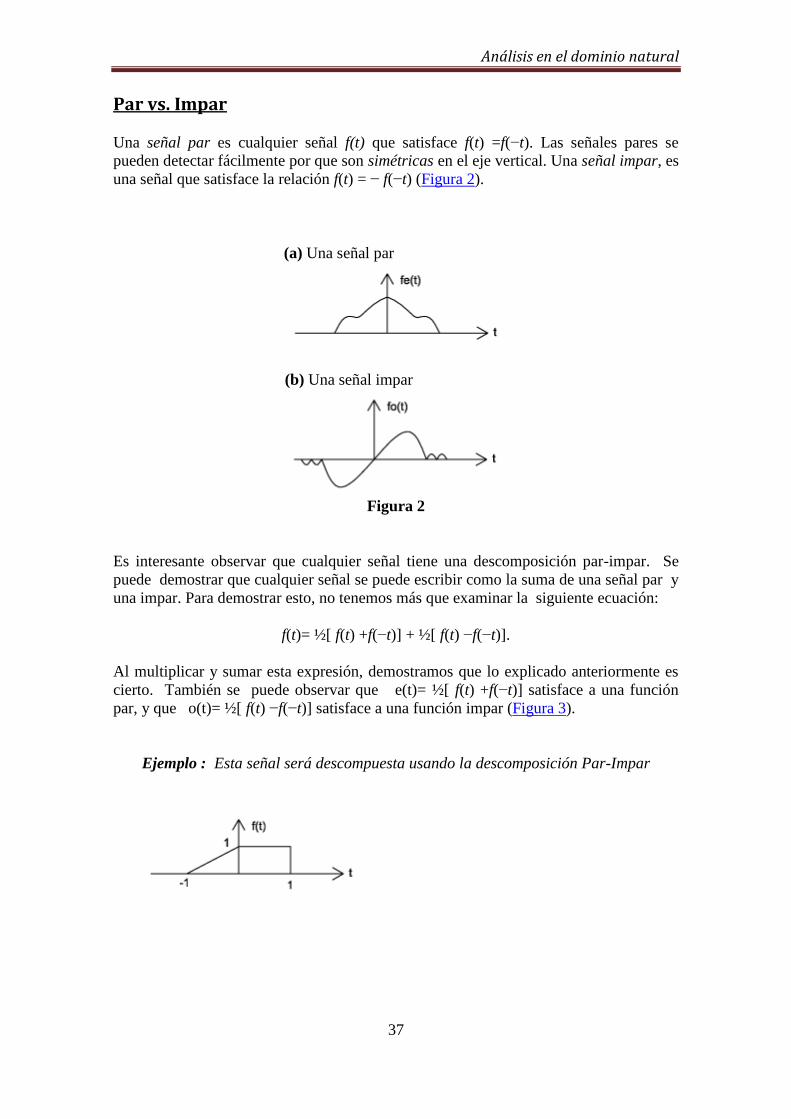
Par vs. Impar
Una señal par es cualquier señal f(t) que satisface f(t) =f(−t). Las señales pares se
pueden detectar fácilmente por que son simétricas en el eje vertical. Una señal impar, es
una señal que satisface la relación f(t) = − f(−t) (Figura 2).
(a) Una señal par
(b) Una señal impar
Figura 2
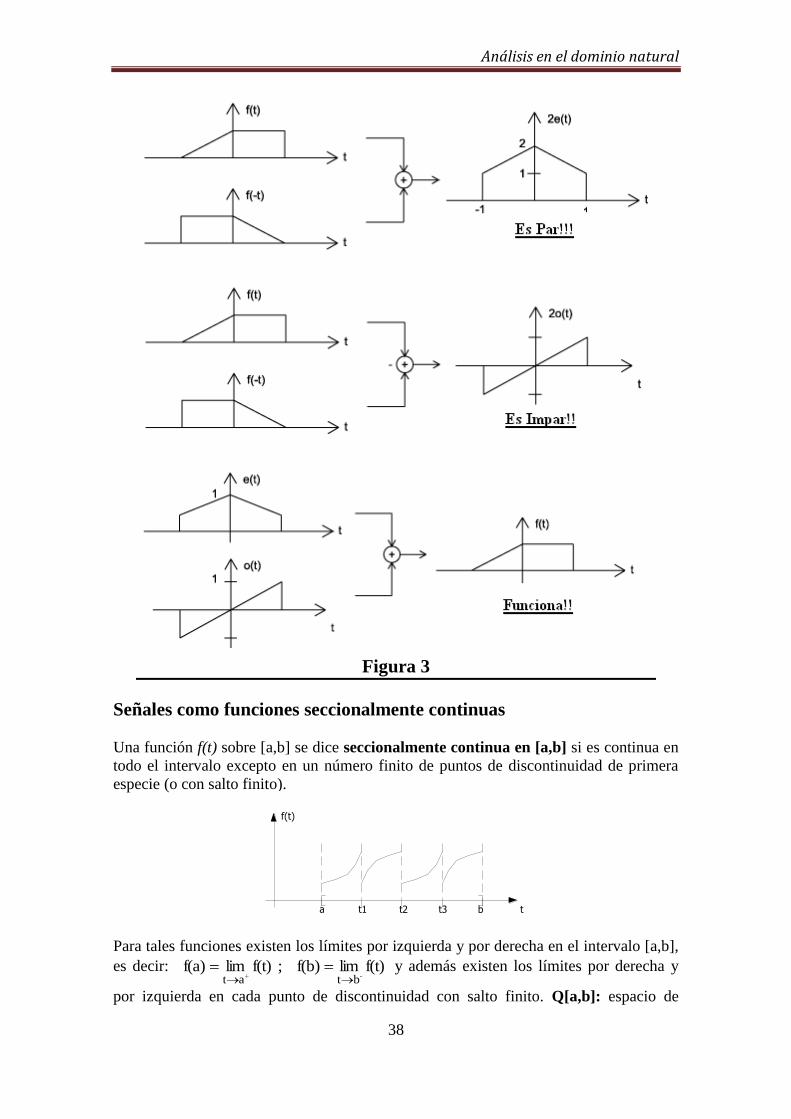
Es interesante observar que cualquier señal tiene una descomposición par-impar. Se
puede demostrar que cualquier señal se puede escribir como la suma de una señal par y
una impar. Para demostrar esto, no tenemos más que examinar la siguiente ecuación:
f(t)= ½[ f(t) +f(−t)] + ½[ f(t) −f(−t)].
Al multiplicar y sumar esta expresión, demostramos que lo explicado anteriormente es
cierto. También se puede observar que e(t)= ½[ f(t) +f(−t)] satisface a una función
par, y que o(t)= ½[ f(t) −f(−t)] satisface a una función impar (Figura 3).
Ejemplo : Esta señal será descompuesta usando la descomposición Par-Impar
Análisis en el dominio natural
38
Figura 3
Señales como funciones seccionalmente continuas
Una función f(t) sobre [a,b] se dice seccionalmente continua en [a,b] si es continua en
todo el intervalo excepto en un número finito de puntos de discontinuidad de primera
especie (o con salto finito).
f(t)
tbt3t2t1a
Para tales funciones existen los límites por izquierda y por derecha en el intervalo [a,b],
es decir: f(t)limf(b);f(t)limf(a)-btat
y además existen los límites por derecha y
por izquierda en cada punto de discontinuidad con salto finito. Q[a,b]: espacio de

Análisis en el dominio natural
39
funciones seccionalmente continuas en [a,b] y Q’[a,b] simboliza el espacio de
funciones seccionalmente continuas en [a,b], diferenciables con continuidad por tramos
en [a,b].
Operación de Compresión vs. Dilatación
Analizar la relación de una señal f(t) con otra, obtenida a partir de la anterior mediante
la relación f(bt) para los siguientes casos b>1, 0<b<1, y b=-1.
TIPOS DE SEÑALES
Rampa unitaria
Definición:
0t0
0t,ttr
Si se quiere una pendiente distinta de 1, sólo es necesario multiplicar por una
constante; por ej., si b > 0, entonces:
0t0
0t,bttbr
Para la función rampa unitaria, se cumple:
tbrbtr si b > 0
at0
at,atatr
Función escalón unitario
Esta función se llama también función de Heaviside,
y se define como:
00
01
t,
t,tus
De la definición de rampa unitaria, surge que :
t
r(t
)
Función rampa
t
r(t-a)
Función rampa
t a a+1
us(t)
Función de Heaviside
t
1
Análisis en el dominio natural
40
10
00
dt
drtsi
dt
drtsi
0 t,tudt
drs
Por otro lado si buscamos un escalón de salto distinto de 1, basta con multiplicar por
una constante C a us(t); por ejemplo si C > 0 entonces:
00
0
t,
t,CtCus .
Ejemplos:
1)
00
01
t,
t,tus 2)
at,
at,atus
0
1 3)
at,
at,CatCus
0
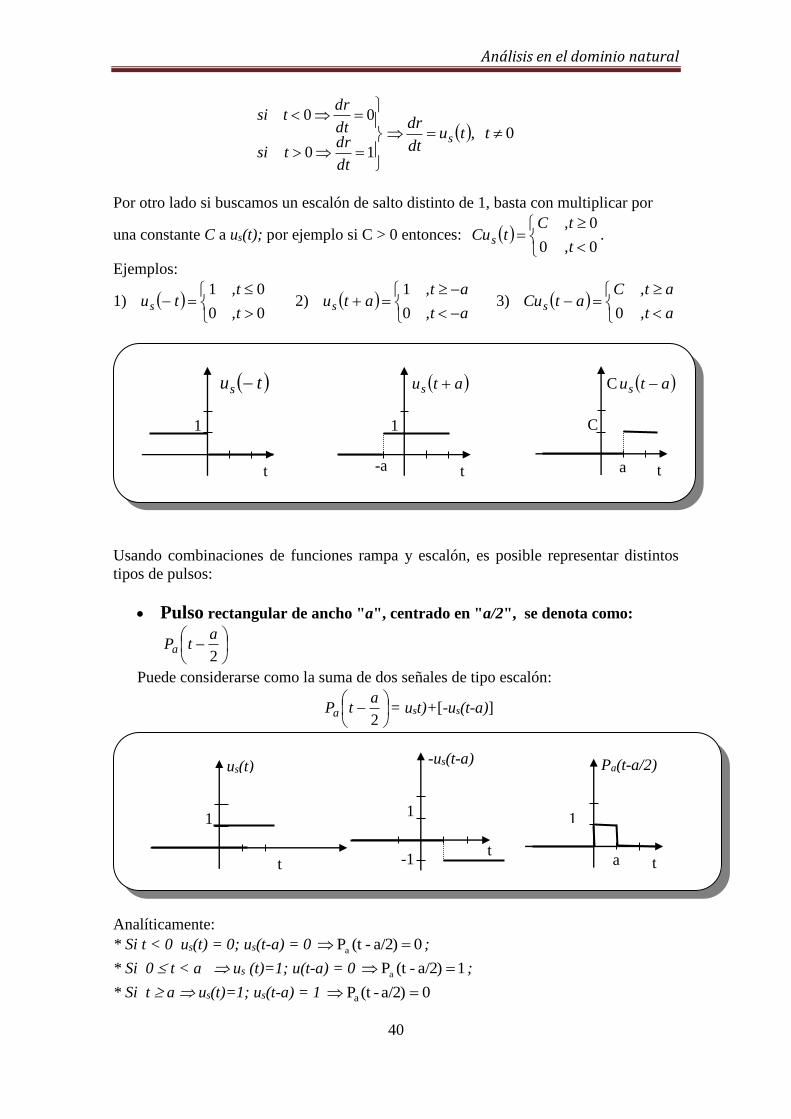
Usando combinaciones de funciones rampa y escalón, es posible representar distintos
tipos de pulsos:
Pulso rectangular de ancho "a", centrado en "a/2", se denota como:
2
atPa
Puede considerarse como la suma de dos señales de tipo escalón:
2
atPa = ust)+[-us(t-a)]
Analíticamente:
* Si t < 0 us(t) = 0; us(t-a) = 0 0a/2)-(tPa ;
* Si 0 t < a us (t)=1; u(t-a) = 0 1a/2)-(tPa ;
* Si t a us(t)=1; us(t-a) = 1 0a/2)-(tPa
t
1
t
1
-a
t
C
a
tus atus C atus
Pa(t-a/2)
t a
1
us(t)
t
1
-us(t-a)
t
1
-1
Análisis en el dominio natural
41
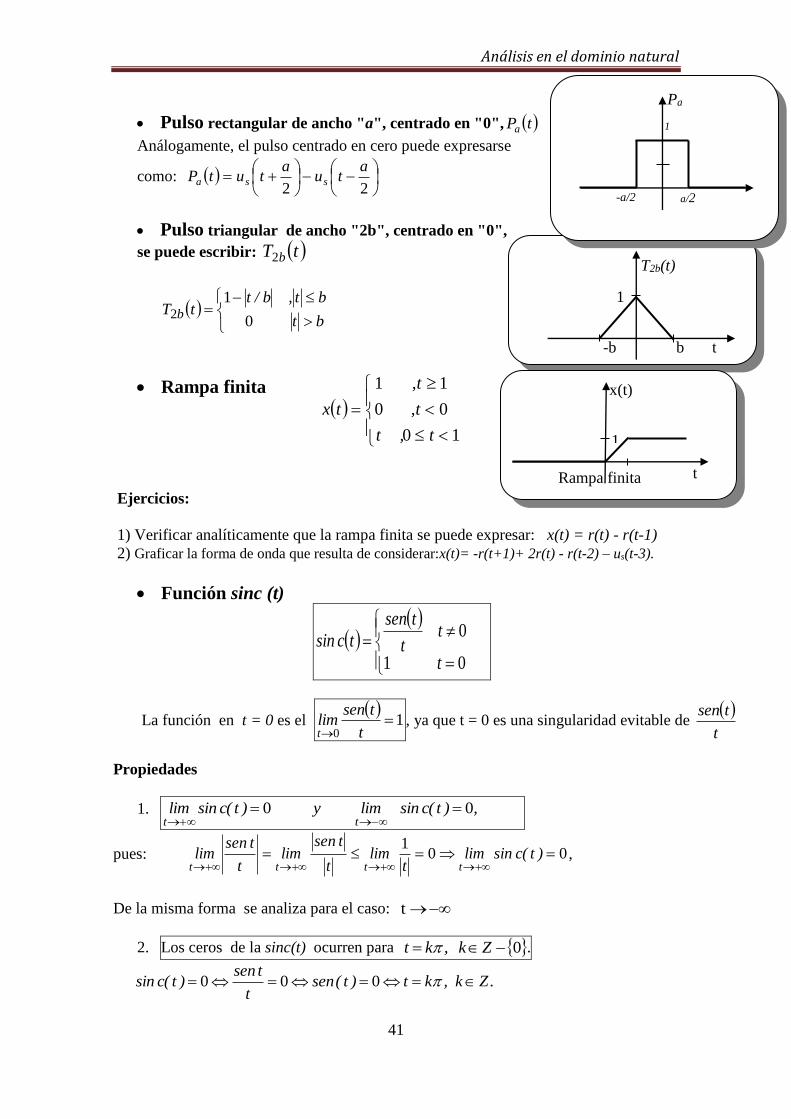
Pulso rectangular de ancho "a", centrado en "0", tPa
Análogamente, el pulso centrado en cero puede expresarse
como:
22
atu
atutP ssa
Pulso triangular de ancho "2b", centrado en "0",
se puede escribir: tT b2
bt
bt,b/ttT b
0
12
Rampa finita
Ejercicios:
1) Verificar analíticamente que la rampa finita se puede expresar: x(t) = r(t) - r(t-1)
2) Graficar la forma de onda que resulta de considerar:x(t)= -r(t+1)+ 2r(t) - r(t-2) – us(t-3).
Función sinc (t)
01
0
t
tt
tsen
tcsin
La función en t = 0 es el
10
t
tsenlimt
, ya que t = 0 es una singularidad evitable de
t
tsen
Propiedades
1. ,)t(csinlimy)t(csinlimtt
00
pues: 001
)t(csinlimt
limt
tsenlim
t
tsenlim
tttt,
De la misma forma se analiza para el caso: t
2. Los ceros de la sinc(t) ocurren para 0 Zk,kt .
.Zk,kt)t(sent
tsen)t(csin 000
10
00
11
t,t
t,
t,
tx
T2b(t)
-b b t
1
-a/2 a/2
Pa
1
Rampa finita
x(t)
1
t

Análisis en el dominio natural
42
0
01000
Zk,ktlosson)t(csindeceroslos
)(csincomoytk,Si
3. La función sinc(t) es par
0
tsi),t(csin
t
)t(sen
t
)t(sen
)t(
)t(sen)t(csin
Si t = 0; sinc(0) = sinc(-0) = 1, luego t : sinc(-t)=sinc(t)
4. De la definición surge que: sinc (t) es continua en t = 0
La gráfica de sinc(t) es:
sinc(t)
t
g(t)=1sinc(t)
t
Ejercicio: Encontrar los ceros de la función sinc(3t).
Función impulso unitario: (t) ó Función DELTA-DIRAC Esta función se debe tratar como una función generalizada, pues no puede definirse su
valor punto a punto como en el caso de una función ordinaria, y se la suele llamar
DISTRIBUCIÓN DELTA DE DIRAC.
Definición:
La función Delta-Dirac, puede definirse a partir de un pulso de alto (amplitud) "1/a" y
ancho "a", centrado en el origen:
como: tPa
limt aa
1
0 ,
Puede pensarse, intuitivamente, que (t) tiene un ancho infinitamente pequeño y su alto
es infinitamente grande, con área unitaria.
Observar también que la definición dada puede expresarse no solo en base a un pulso
rectangular, sino también con otra función cualquiera. Podría expresarse entonces, con
el mismo concepto que antes, del siguiente modo:
4 3 2 2 3 4
El área asociada al pulso es 1, cualquiera sea el valor de a.
-a/2 a/2
Pa
1/a
20
2
11
at,
at,
atPa
a
)lim btfbtb
Análisis en el dominio natural
43
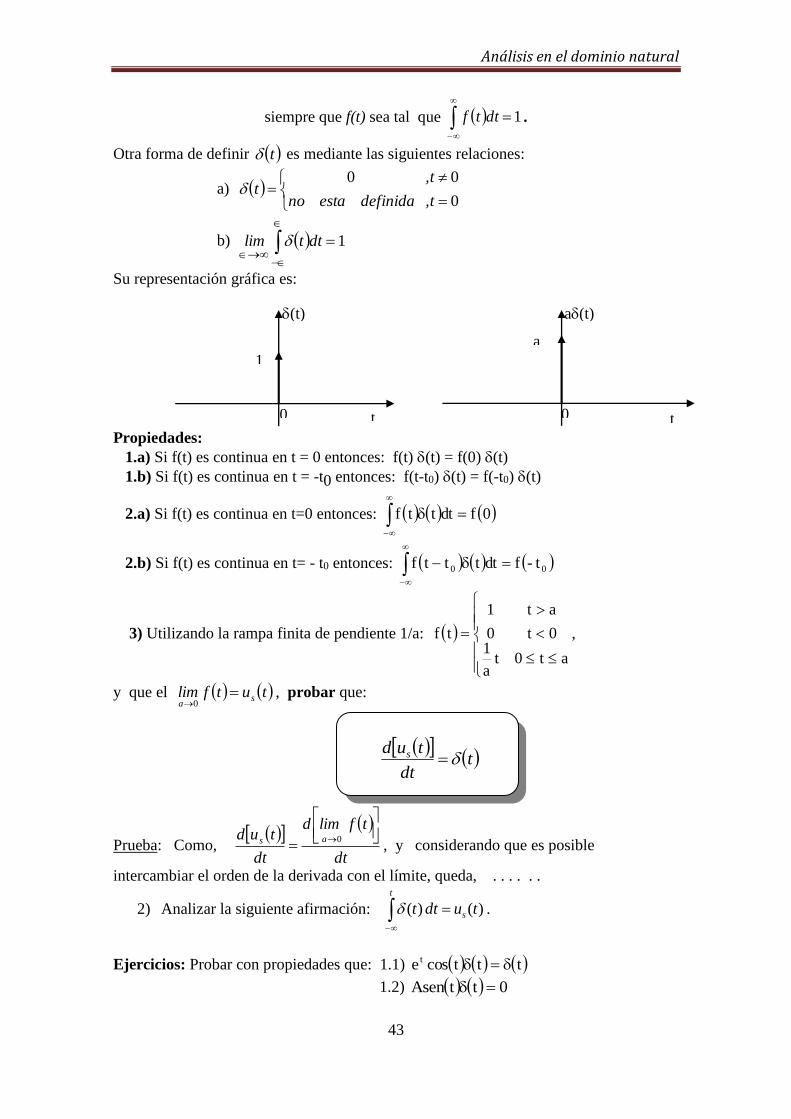
siempre que f(t) sea tal que 1
dttf .
Otra forma de definir t es mediante las siguientes relaciones:
a) 0
00
t,
t,
definidaestanot
b) 1
dttlim
Su representación gráfica es:
Propiedades:
1.a) Si f(t) es continua en t = 0 entonces: f(t) (t) = f(0) (t)
1.b) Si f(t) es continua en t = -t0 entonces: f(t-t0) (t) = f(-t0) (t)
2.a) Si f(t) es continua en t=0 entonces:
0fdtttf
2.b) Si f(t) es continua en t= - t0 entonces:
00 t-fdttttf
3) Utilizando la rampa finita de pendiente 1/a:
at0ta
10t0
at1
tf ,
y que el tutflim sa
0
, probar que:
Prueba: Como,
dt
tflimd
dt
tud as
0
, y considerando que es posible
intercambiar el orden de la derivada con el límite, queda, . . . . . .
2) Analizar la siguiente afirmación: )()( tutdt s
t
.
Ejercicios: Probar con propiedades que: 1.1) tttcose t
1.2) 0ttAsen
(t)
1
0 t
a(t)
a
0 t
t
dt
tud s
Análisis en el dominio natural
44
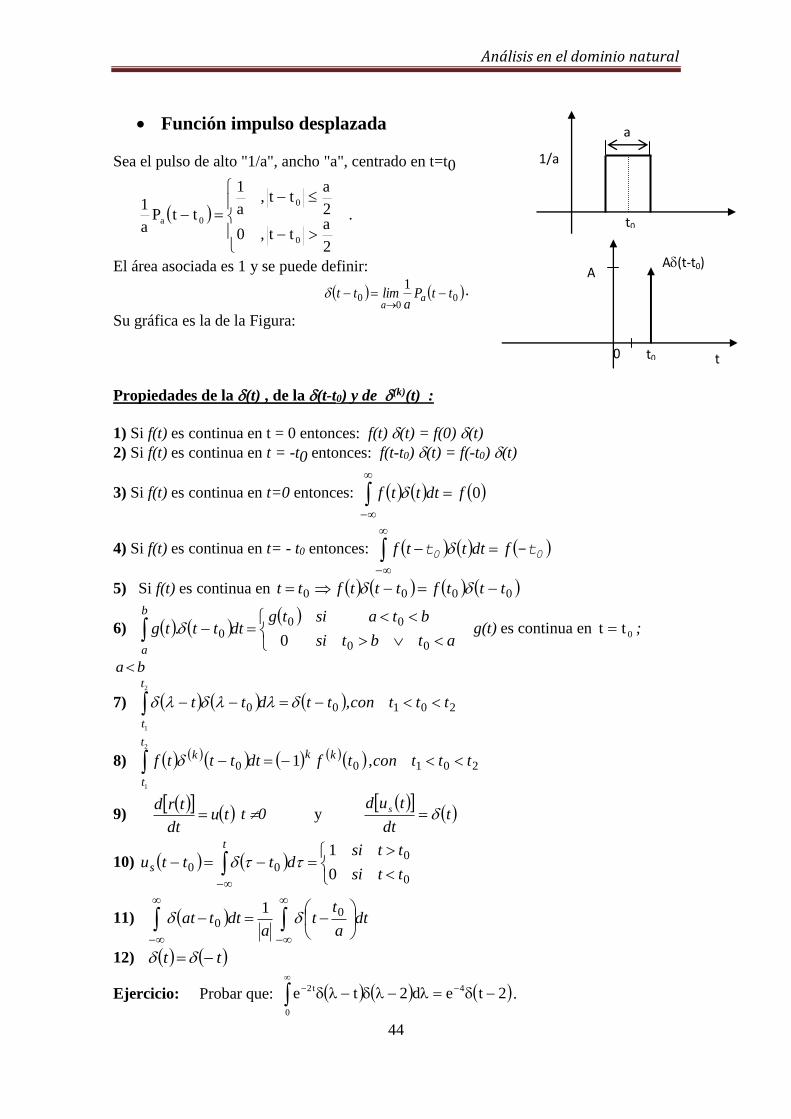
Función impulso desplazada
Sea el pulso de alto "1/a", ancho "a", centrado en t=t0
2
att,0
2
att,
a
1
ttPa
1
0
0
0a .
El área asociada es 1 y se puede definir:
00
0
1ttP
alimtt aa
.
Su gráfica es la de la Figura:
Propiedades de la (t) , de la (t-t0) y de (k)(t) :
1) Si f(t) es continua en t = 0 entonces: f(t) (t) = f(0) (t)
2) Si f(t) es continua en t = -t0 entonces: f(t-t0) (t) = f(-t0) (t)
3) Si f(t) es continua en t=0 entonces:
0fdtttf
4) Si f(t) es continua en t= - t0 entonces:
00 t-t fdtttf
5) Si f(t) es continua en 0000 tttftttftt
6)
atbtsi
btasitgdttt.tg
b
a 00
000
0 g(t) es continua en 0tt ;
ba
7) 20100
2
1
tttcon,ttdtt
t
t
8) 20100 12
1
tttcon,tfdttttf kkt
t
k
9)
tudt
trd t 0 y
t
dt
tud s
10)
0
000
0
1
ttsi
ttsidtttu
t
s
11)
dt
a
tt
adttat 0
0
1
12) tt
Ejercicio: Probar que:
0
4t2 2ted2te .
a
1/a
aa
t0
A(t-t0) A
0 t t0

Análisis en el dominio natural
45
Observar que: toda señal x(t) se puede expresar como un continuo de impulsos
ponderados
Según la propiedad 3) 000 tttxtttx hacemos 0t
txttx
Si integramos en ambos miembros:
dtxdttx
De aquí:
dtxdttx
Finalmente, podemos expresar:
dtxtx (A)
Luego, como se dijo, la señal x(t) quedó expresada (A) como un continuo de
impulsos ponderados. __________________________________________________________________
Análisis en el dominio natural
46
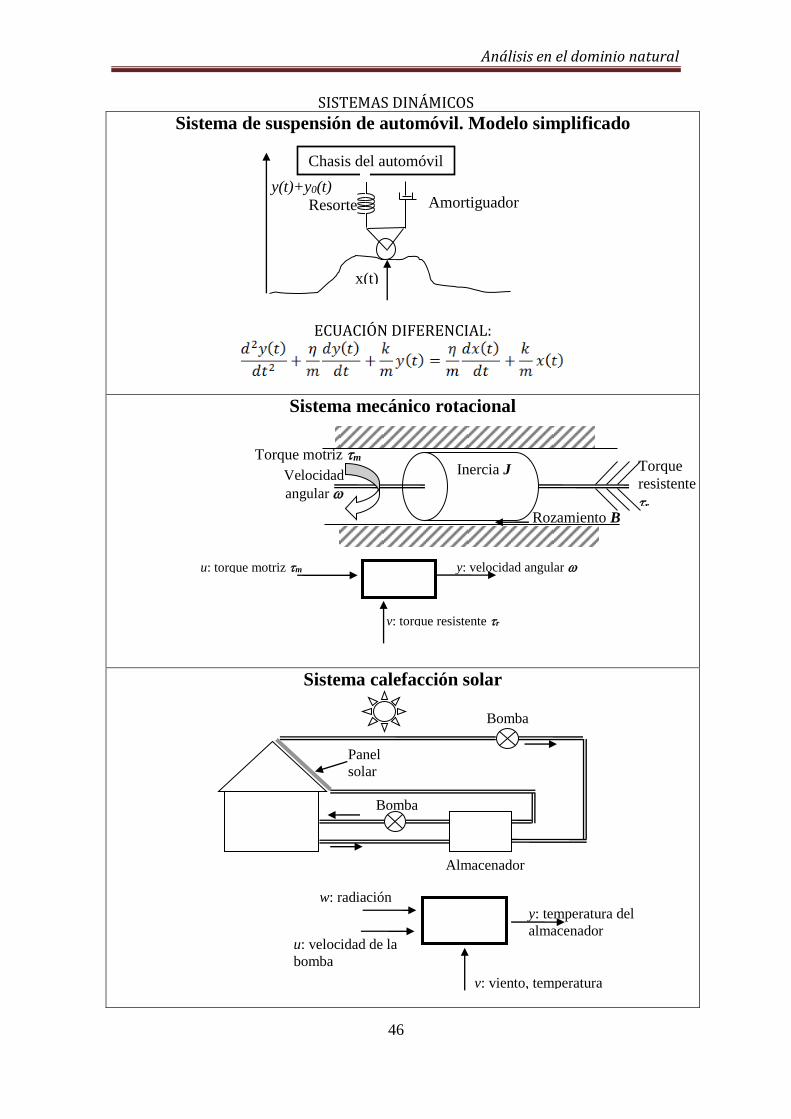
SISTEMAS DINÁMICOS
Sistema de suspensión de automóvil. Modelo simplificado
ECUACIÓN DIFERENCIAL:
Sistema mecánico rotacional
Sistema calefacción solar
Inercia J Torque
resistente
r Rozamiento B
Torque motriz m
Velocidad
angular
y: velocidad angular
Bomba
Bomba
Panel
solar
Chasis del automóvil
Amortiguador
y(t)+y0(t)
Resorte
x(t)
u: torque motriz m
v: torque resistente r
Almacenador
v: viento, temperatura
exterior
y: temperatura del
almacenador u: velocidad de la
bomba
w: radiación
solar
Análisis en el dominio natural
47
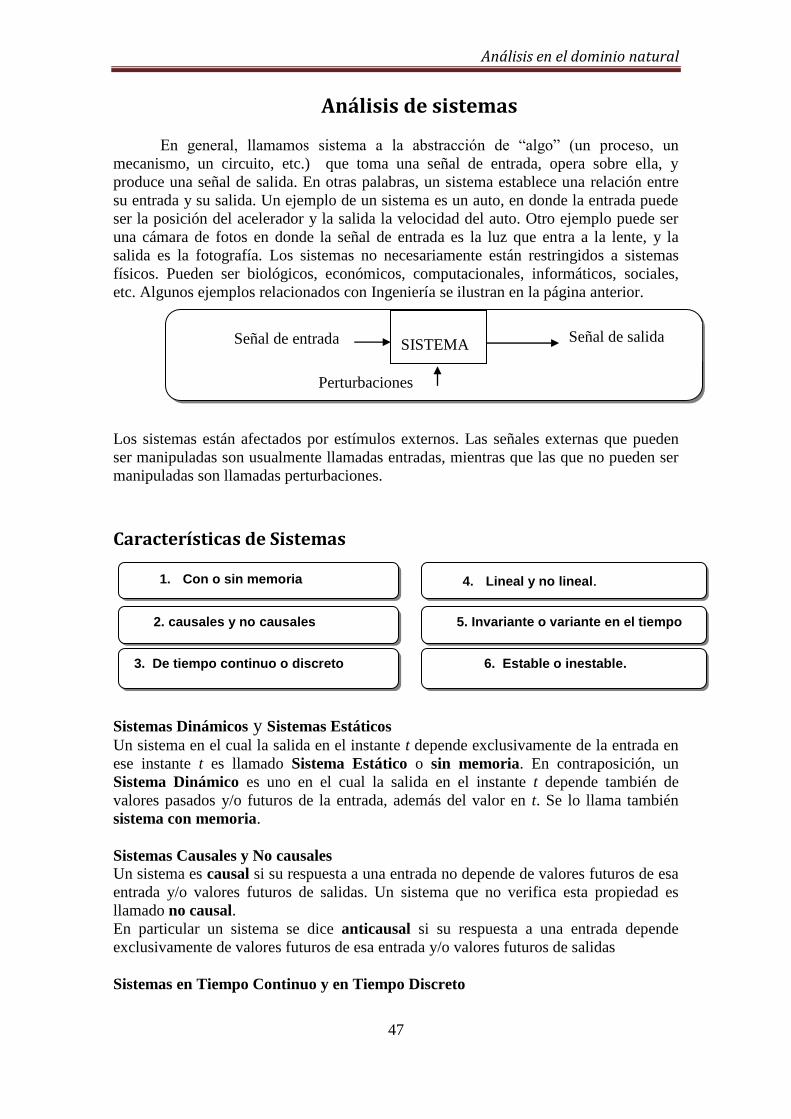
Análisis de sistemas
En general, llamamos sistema a la abstracción de “algo” (un proceso, un
mecanismo, un circuito, etc.) que toma una señal de entrada, opera sobre ella, y
produce una señal de salida. En otras palabras, un sistema establece una relación entre
su entrada y su salida. Un ejemplo de un sistema es un auto, en donde la entrada puede
ser la posición del acelerador y la salida la velocidad del auto. Otro ejemplo puede ser
una cámara de fotos en donde la señal de entrada es la luz que entra a la lente, y la
salida es la fotografía. Los sistemas no necesariamente están restringidos a sistemas
físicos. Pueden ser biológicos, económicos, computacionales, informáticos, sociales,
etc. Algunos ejemplos relacionados con Ingeniería se ilustran en la página anterior.
Los sistemas están afectados por estímulos externos. Las señales externas que pueden
ser manipuladas son usualmente llamadas entradas, mientras que las que no pueden ser
manipuladas son llamadas perturbaciones.
Características de Sistemas
Sistemas Dinámicos y Sistemas Estáticos
Un sistema en el cual la salida en el instante t depende exclusivamente de la entrada en
ese instante t es llamado Sistema Estático o sin memoria. En contraposición, un
Sistema Dinámico es uno en el cual la salida en el instante t depende también de
valores pasados y/o futuros de la entrada, además del valor en t. Se lo llama también
sistema con memoria.
Sistemas Causales y No causales
Un sistema es causal si su respuesta a una entrada no depende de valores futuros de esa
entrada y/o valores futuros de salidas. Un sistema que no verifica esta propiedad es
llamado no causal.
En particular un sistema se dice anticausal si su respuesta a una entrada depende
exclusivamente de valores futuros de esa entrada y/o valores futuros de salidas
Sistemas en Tiempo Continuo y en Tiempo Discreto
SISTEMA Señal de entrada Señal de salida
Perturbaciones
1. Con o sin memoria
2. causales y no causales Invariante o variante en el tiempo.
3. De tiempo continuo o discreto
4. Lineal y no lineal.
5. Invariante o variante en el tiempo Invariante o variante en el tiempo.
6. Estable o inestable.
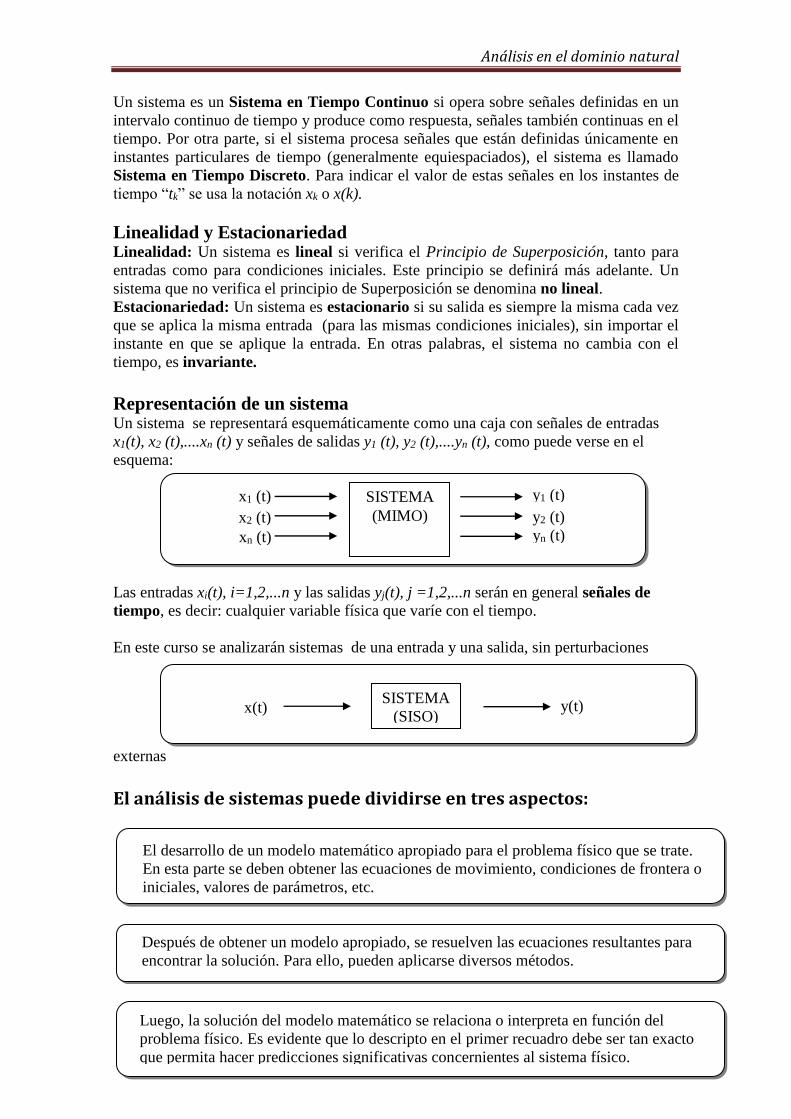
Análisis en el dominio natural
48
Un sistema es un Sistema en Tiempo Continuo si opera sobre señales definidas en un
intervalo continuo de tiempo y produce como respuesta, señales también continuas en el
tiempo. Por otra parte, si el sistema procesa señales que están definidas únicamente en
instantes particulares de tiempo (generalmente equiespaciados), el sistema es llamado
Sistema en Tiempo Discreto. Para indicar el valor de estas señales en los instantes de
tiempo “tk” se usa la notación xk o x(k).
Linealidad y Estacionariedad Linealidad: Un sistema es lineal si verifica el Principio de Superposición, tanto para
entradas como para condiciones iniciales. Este principio se definirá más adelante. Un
sistema que no verifica el principio de Superposición se denomina no lineal.
Estacionariedad: Un sistema es estacionario si su salida es siempre la misma cada vez
que se aplica la misma entrada (para las mismas condiciones iniciales), sin importar el
instante en que se aplique la entrada. En otras palabras, el sistema no cambia con el
tiempo, es invariante.
Representación de un sistema Un sistema se representará esquemáticamente como una caja con señales de entradas
x1(t), x2 (t),....xn (t) y señales de salidas y1 (t), y2 (t),....yn (t), como puede verse en el
esquema:
Las entradas xi(t), i=1,2,...n y las salidas yj(t), j =1,2,...n serán en general señales de
tiempo, es decir: cualquier variable física que varíe con el tiempo.
En este curso se analizarán sistemas de una entrada y una salida, sin perturbaciones
externas
El análisis de sistemas puede dividirse en tres aspectos:
SISTEMA
(MIMO)
x1 (t)
x2 (t)
xn (t)
y1 (t)
y2 (t)
yn (t)
SISTEMA
(SISO) x(t) y(t)
El desarrollo de un modelo matemático apropiado para el problema físico que se trate.
En esta parte se deben obtener las ecuaciones de movimiento, condiciones de frontera o
iniciales, valores de parámetros, etc.
Después de obtener un modelo apropiado, se resuelven las ecuaciones resultantes para
encontrar la solución. Para ello, pueden aplicarse diversos métodos.
Luego, la solución del modelo matemático se relaciona o interpreta en función del
problema físico. Es evidente que lo descripto en el primer recuadro debe ser tan exacto
que permita hacer predicciones significativas concernientes al sistema físico.
Análisis en el dominio natural
49
ANÁLISIS DE SISTEMAS LINEALES
Una clase de sistemas son los lineales. El análisis de sistemas lineales es
importante principalmente por su utilidad, pues aunque un sistema físico nunca es
completamente lineal, en ciertas áreas de aplicación, un modelo lineal se puede usar con
frecuencia en forma apropiada. Además, existen una gran cantidad de teorías
matemáticas que permiten analizar tales sistemas.
Por el contrario, los sistemas no lineales requieren análisis particulares, es decir, cada
sistema no lineal debe estudiarse como un caso único. No hay métodos generales ni
soluciones generales.
Como ingenieros, no sólo interesa el análisis, sino también la síntesis de sistemas o el
diseño de sistemas que constituye la parte creativa de la ingeniería.
De aquí que, como en otras actividades creativas, para abordar el diseño de sistemas
primero se debe aprender a analizarlo.
Principio de Superposición
Un sistema es lineal si satisface el principio de superposición, que engloba las
propiedades de homogeneidad (escalado) y aditividad.
Si para la entrada x(t) se obtiene la salida y(t), y para la entrada x(t) se obtiene
y(t), cualquiera sea la constante , entonces decimos que se cumple la propiedad
de homogeneidad, es decir:
Si tytxtytx
Además, se debe cumplir la propiedad de aditividad:
Si
tytx
tytx
22
11 tytytxtx 2121
Ambas proposiciones se pueden combinar en la siguiente ecuación
(principio de superposición):
tyctyctxctxc 22112211 c1,c2, ctes.
Para representar la transformación de entradas a salidas en forma funcional se
puede reemplazar las flechas por la notación:
y(t)=L[x(t)] ,
donde L representa una transformación lineal, es decir:
txLctxLctxctxcL 22112211 ; c1,c2, reales.

Análisis en el dominio natural
50
Ejercicios:
a) Sea un sistema con relación de entrada-salida dada por la ecuación lineal:
b)t(ax)t(y , probar si el sistema es lineal.
b) Idem anterior, pero la relación está dada por: 43 ttxtxL
Invariancia en el tiempo
Los sistemas invariantes en el tiempo se modelan mediante ecuaciones diferenciales
con coeficientes constantes.
Una caracterización sencilla de los sistemas invariantes en el tiempo se tiene
desplazando en el tiempo a la señal de entrada:
Si )t(y)t(x entonces, )Tt(y)Tt(x para cualquier t y T.
Memoria en el tiempo
Si la salida para cualquier tiempo t depende sólo de la entrada en el mismo
tiempo, el sistema se llama "sin memoria", o también, estacionario.
Si la salida en el tiempo t o tk depende de los valores de entrada correspondientes
a cierto intervalo (t-T ,t), entonces el sistema "tiene memoria" de longitud T.
También se lo llama sistema dinámico.
Ej.: El sistema formado por un capacitor con la entrada definida como la corriente que
circula por el mismo, tiene memoria de duración infinita, ya que:
t
dttic
tv ´´1
indica que la salida depende de la entrada en todo el intervalo t, .
Sistema LIT
Modelo de un sistema dinámico Lineal e invariante en el tiempo
Cuando la función de entrada x(t) y la función de salida y(t) de un sistema dinámico
están relacionadas por una ecuación diferencial lineal ordinaria a coeficientes constantes
(EDO), entonces puede probarse que ese sistema es lineal, invariante en el tiempo y con
memoria (SLI). Para sistemas de una sola entrada-salida, la ecuación general puede ser:
txb
dt
tdxb
dt
txdb
dt
txdbtya
dt
tdya
dt
tyda
dt
tyda
m
m
mm
m
mn
n
nn
n
n 011
1
1011
1
1 ......
(A)
donde, x(t) :función de excitación del sistema ( o función de entrada),
y(t) : función de respuesta del sistema ( o función de salida ).
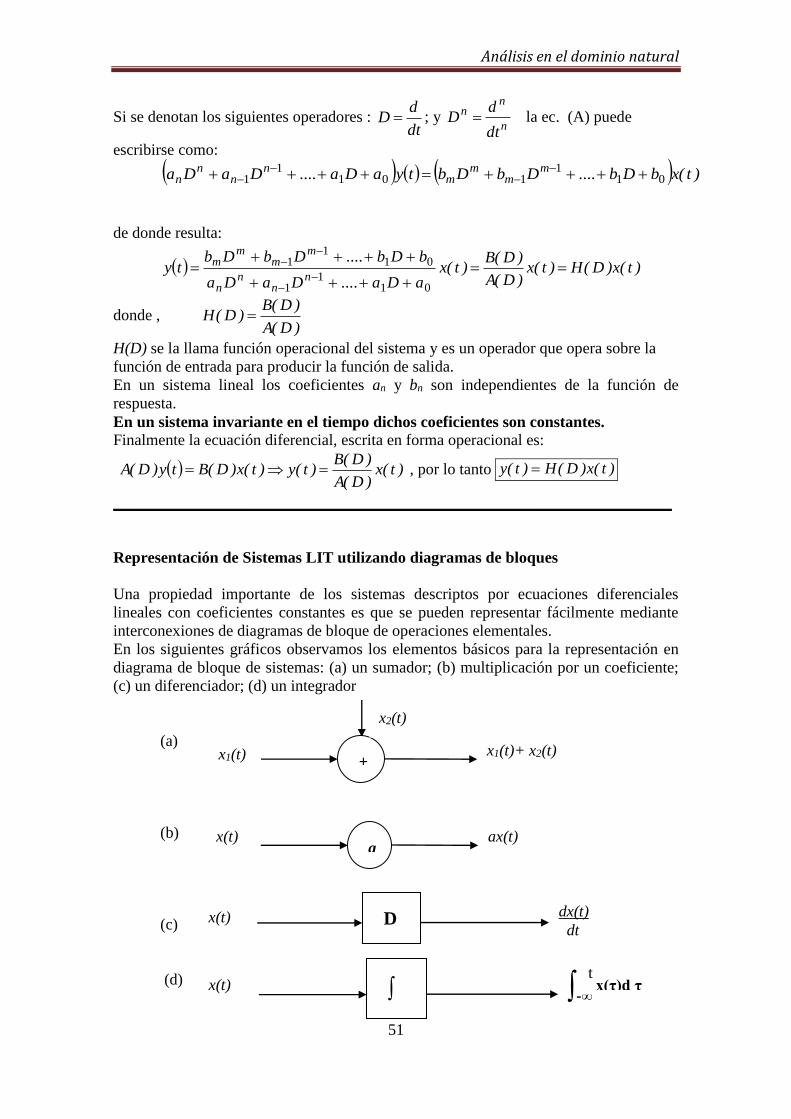
Análisis en el dominio natural
51
Si se denotan los siguientes operadores : dt
dD ; y
n
nn
dt
dD la ec. (A) puede
escribirse como:
)t(xbDb....DbDbtyaDa....DaDa mm
mm
nn
nn 01
1101
11
de donde resulta:
)t(x)D(H)t(x)D(A
)D(B)t(x
aDa....DaDa
bDb....DbDbty
nn
nn
mm
mm
011
1
011
1
donde , )D(A
)D(B)D(H
H(D) se la llama función operacional del sistema y es un operador que opera sobre la
función de entrada para producir la función de salida.
En un sistema lineal los coeficientes an y bn son independientes de la función de
respuesta.
En un sistema invariante en el tiempo dichos coeficientes son constantes.
Finalmente la ecuación diferencial, escrita en forma operacional es:
)t(x)D(A
)D(B)t(y)t(x)D(Bty)D(A , por lo tanto )t(x)D(H)t(y
______________________________________________________________________
Representación de Sistemas LIT utilizando diagramas de bloques
Una propiedad importante de los sistemas descriptos por ecuaciones diferenciales
lineales con coeficientes constantes es que se pueden representar fácilmente mediante
interconexiones de diagramas de bloque de operaciones elementales.
En los siguientes gráficos observamos los elementos básicos para la representación en
diagrama de bloque de sistemas: (a) un sumador; (b) multiplicación por un coeficiente;
(c) un diferenciador; (d) un integrador
(a)
(b)
(c)
(d)
x(t) ax(t)
a
x(t)
D dx(t)
dt
x(t)
∫ ∫-∞
x(τ)d τ
t
x1(t) x1(t)+ x2(t)
+
x2(t)
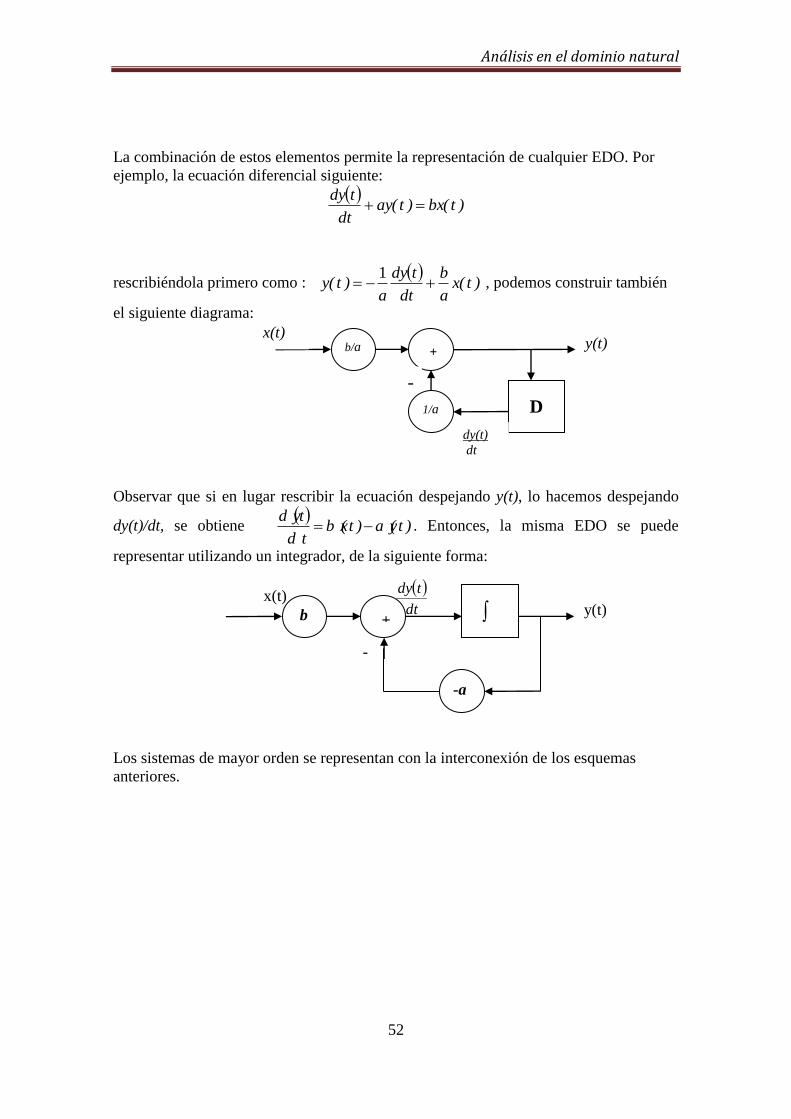
Análisis en el dominio natural
52
La combinación de estos elementos permite la representación de cualquier EDO. Por
ejemplo, la ecuación diferencial siguiente:
)t(bx)t(ay
dt
tdy
rescribiéndola primero como :
)t(xa
b
dt
tdy
a)t(y
1 , podemos construir también
el siguiente diagrama:
Observar que si en lugar rescribir la ecuación despejando y(t), lo hacemos despejando
dy(t)/dt, se obtiene
)t(a y)t(b xd t
td y . Entonces, la misma EDO se puede
representar utilizando un integrador, de la siguiente forma:
Los sistemas de mayor orden se representan con la interconexión de los esquemas
anteriores.
x(t)
y(t) b/a
+
D 1/a
dy(t)
dt
-
-
x(t)
dt
tdy
b
+
∫
-a
y(t)
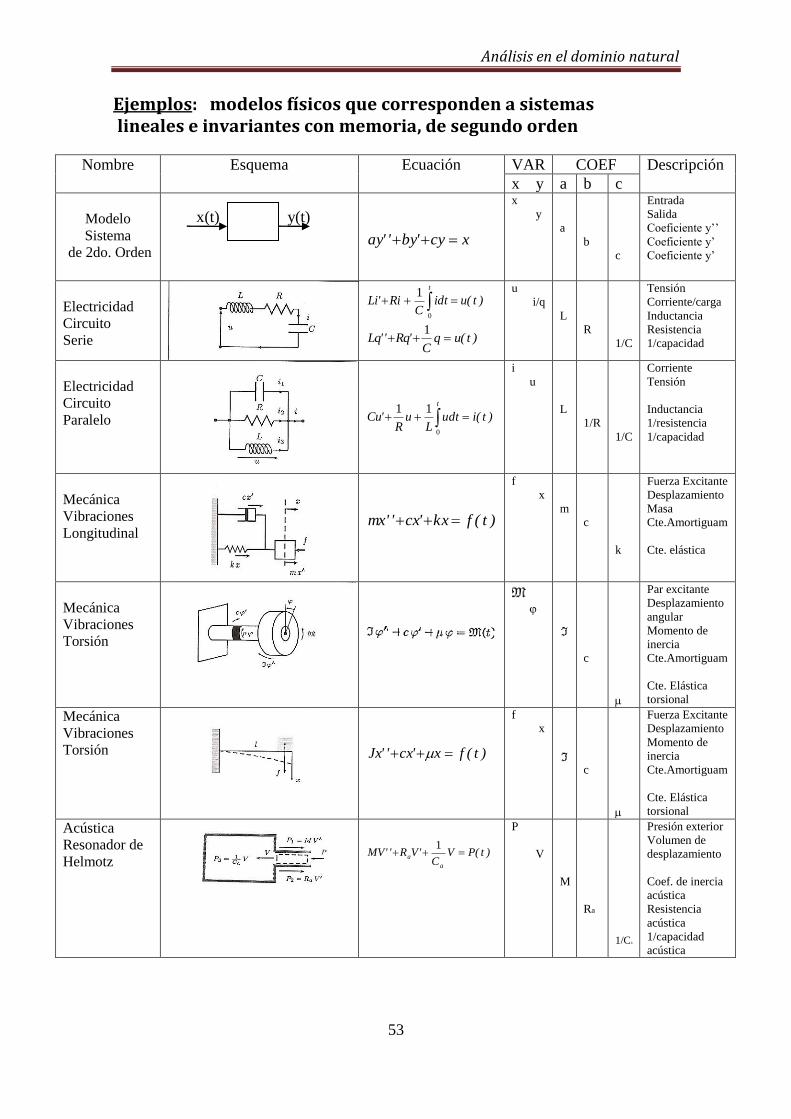
Análisis en el dominio natural
53
Ejemplos: modelos físicos que corresponden a sistemas lineales e invariantes con memoria, de segundo orden
Nombre Esquema Ecuación VAR COEF Descripción
x y a b c
Modelo
Sistema
de 2do. Orden
xcy'by''ay
x
y
a
b
c
Entrada
Salida
Coeficiente y’’
Coeficiente y’
Coeficiente y’
Electricidad
Circuito
Serie
)t(uidtC
Ri'Li
t
0
1
)t(uqC
'Rq''Lq 1
u
i/q
L
R
1/C
Tensión
Corriente/carga
Inductancia
Resistencia
1/capacidad
Electricidad
Circuito
Paralelo
)t(iudtL
uR
'Cu
t
0
11
i
u
L
1/R
1/C
Corriente
Tensión
Inductancia
1/resistencia
1/capacidad
Mecánica
Vibraciones
Longitudinal
)t(fkx'cx''mx
f
x
m
c
k
Fuerza Excitante
Desplazamiento
Masa
Cte.Amortiguam
Cte. elástica
Mecánica
Vibraciones
Torsión
c
Par excitante
Desplazamiento
angular
Momento de
inercia
Cte.Amortiguam
Cte. Elástica
torsional
Mecánica
Vibraciones
Torsión
)t(fx'cx''Jx
f
x
c
Fuerza Excitante
Desplazamiento
Momento de
inercia
Cte.Amortiguam
Cte. Elástica
torsional
Acústica
Resonador de
Helmotz
)t(PVC
'VR''MVa
a 1
P
V
M
Ra
1/Ca
Presión exterior
Volumen de
desplazamiento
Coef. de inercia
acústica
Resistencia
acústica
1/capacidad
acústica
x(t) y(t)

Análisis en el dominio natural
54
Métodos de resolución
Consideremos una ecuación diferencial ordinaria con coeficientes constantes
donde el lado derecho de la ecuación no contiene derivadas, es decir:
txtyadt
tdya......
dt
tyda
dt
tyda
n
n
nn
n
n
011
1
1 (A)
Escrita en forma operacional: txtyaDa...DaDa nn
nn
011
1
o más reducida: A(D)[y(t)] = x(t) donde A(D) es el operador:
01
1
1 aDa...DaDa)D(A n
n
n
n
El primer método, propone encontrar la solución de (A) como formada por dos
componentes: y(t) = yh(t) + yp(t)
La solución homogénea (que constituye la forma transitoria de la solución completa
cuando el sistema es estable y causal como se verá más adelante) se obtiene de la
ecuación homogénea correspondiente a (A), es decir:
A(D)[yh(t)] = 0 (B)
y la solución en forma general es:
tyc....tyctycty nnh 2211 (C)
donde las funciones y1(t),...yn(t) dependen de las raíces de la ecuación característica
asociada:
0011
1 ara...rararf n
nn
n , (D)
y los coeficientes a0,... an, son los mismos que los del operador A(D).
i) Si (D) tiene "n" raíces distintas, las funciones yi(t), i=1,2,...n son tri
iety y
la solución homogénea es:
trn
trtrh
nec....ececty 21
21 (E)
ii) Si las raíces no son todas distintas, las funciones yi(t) tomarán diversas formas
dependiendo de la multiplicidad de las raíces de (D):
1) Para cada raíz real "r" la función es: ert
HOMOGÉNEA, o NATURAL
yh(t)
NO HOMOGÉNEA O
PARTICULAR, de estado estable,
yp(t).

Análisis en el dominio natural
55
2) Para cada raíz real "r" de multiplicidad "k", las funciones son : ert, tert, .....tk-1ert
3) Para cada par complejo simple de raíces a ± jb , las funciones pueden escribirse como
e(a+jb)t , y e(a-jb)t , o más convenientemente como:
btcoseat y btseneat
y entonces, estas raíces contribuyen a la respuesta homogéna con:
btsencbtcosceat21 , donde
1c y 2c son reales.
4) Para cada par complejo simple de raíces a ± bj de multiplicidad "k", las funciones
son:
btsenet,btcoset;......;btsente,btcoste,btsene,btcose atkatkatatatat 11
Cuando las constantes ci, i=1,2,..n; no se especifican, yh(t) se conoce como función
solución. (ec. (E))
Ejercicio: Verificar que yh(t) es solución de la ecuación homogénea: A(D)[yh(t)]=0
(Suponer que trn
trtrh
nec....ececty 21
21 ).
Para determinar los valores de las constantes ci con i=1,2,...n se utilizan las condiciones
iniciales o de frontera del problema, aplicadas a la solución completa:
y(t) = yh(t) + yp(t) = tyc....tyctyc nn 2211 + yp(t)
La forma de la solución particular es un poco más complicada de encontrar.
Existen varios métodos. Uno de ellos es el de los coeficientes indeterminados,
normalmente considerado en los cursos de Análisis Matemático. Recuerde este
método resolviendo el siguiente ejemplo sencillo:
Ejercicios: Suponga la ecuación diferencial de primer orden, )()()(' txtyty .
Verifique que para y(0)=1 y x(t) =3, la solución es y(t) =3-2e-t.
Ejercicios: Dada las siguientes ecuaciones diferenciales, hallar la yh(t):
1 -
0442
2
3
3
tydt
tdy
dt
tyd
dt
tyd, Rta: ttt
h ecececty 23
221
2 -
08422
2
3
3
tydt
tdy
dt
tyd
dt
tyd, Rta: ttt
h tecececty 23
22
21
3 -
02
2
3
3
tydt
tdy
dt
tyd
dt
tyd, Rta: tsenctcoscecty t
h 321
______________________________________________________________
Análisis en el dominio natural
56
Método del operador anulador
Se considera ahora otro método, el denominado método del operador anulador LA,
que permite encontrar la solución completa, y(t).
El procedimiento requiere, como primer paso, encontrar un operador que anule la
función particular dada, x(t) en la ecuación (A).
Entonces, dado x(t) encontrar LA , tal que LA[x(t)]=0.
LA siempre se puede encontrar si x(t) es solución de una ecuación homogénea con
coeficientes constantes.
Por ejemplo, si:
a) atetx , será LA = D-a .
b) btBsenbtcosAtx , será: LA =D2+b2.
c) btBsenbtcosAetx at , será LA =(D2+b2 ).(D-a)
Una vez hallado LA, se aplica a ambos miembros de la ecuación completa original.
Haciendo ésto se obtiene otra ecuación homogénea. Por ejemplo, suponga que se quiere
resolver la ecuación:
A(D)[y(t)] = x(t),
entonces, LA{ A(D)[ [y(t)]}= LA[x(t)] = 0 (I)
la que puede resolverse por el método delineado previamente para una ecuación
homogénea. Entonces, la función solución que se propone es:
**
prprpppp
*
nn tyc....tyctyctyc....tyctycty 22112211
Las n primeras funciones (*) satisfacen A(D)[ [y(t)]=0 ; dichos términos
sumarán cero y los únicos términos del segundo miembro serán (**) que provienen de la
función particular de excitación (entrada).
Si se igualan coeficientes de términos semejantes en ambos miembros de la
ecuación, es posible determinar los prc y obtener la solución forzada. Por lo visto, en
este método no es necesario proponer una forma para la solución particular. Sí es
necesario, por el contrario, encontrar la forma del operador anulador.
Ejemplo: Considere la ecuación diferencial, )t(sentyDtyA(D) 1[ 2
En este caso, casualmente, el operador anulador es 12 D . Así, la ecuación homogénea a
resolver será de cuarto orden, dada por: 011 22 tyDD ,

Análisis en el dominio natural
57
la que podría escribirse también como
0122
2
4
4
dt
tyd
dt
tyd.
La ecuación característica correspondiente es 011 22 rr , cuyas raíces son j y –j
para cada factor, resultando raíces de multiplicidad doble. Entonces, la función solución es:
tsentctcostctsenctcoscty pp 2121 .
Si se sustituye esta función en la ecuación original, se obtiene la siguiente,
)t(sentsentctcostctsenctcoscD pp 2121
2 1 .
Operamos entonces del siguiente modo:
)t(sentsentctcostcDtsenctcoscD
I
**
pp
*
21
2
0
21
2 11
El primer término es 0 porque corresponde a la forma de la solución homogénea de la
ecuación original. Con el segundo término, (I), operamos e igualamos coeficientes. Las
derivadas segundas que aparecen en I son:
)tcost)t(sen(ctcostcD pp 211
2 ; )sentt)tcos((ctsentcD pp 222
2;
sustituyendo y operando queda, )t(sentcosc)t(sencI pp 21 22 . Entonces
será, 021 21 pp c,/c .
La solución completa es: tcost/tsenctcoscty 2121 (II)
Los coeficientes que faltan determinar dependen de las condiciones iniciales.
Supongamos que los datos son: 0010 )('y,)(y . Sustituimos en (II) y obtenemos:
21210
21
10
22
21
11
/c/c)('y
))t(tsen)t(cos(/)tcos(c)t(senc)t('y
cc)(y
Luego, la solución completa para esas condiciones iniciales y esa entrada dada es:
tcost/tsen/tcosty 2121
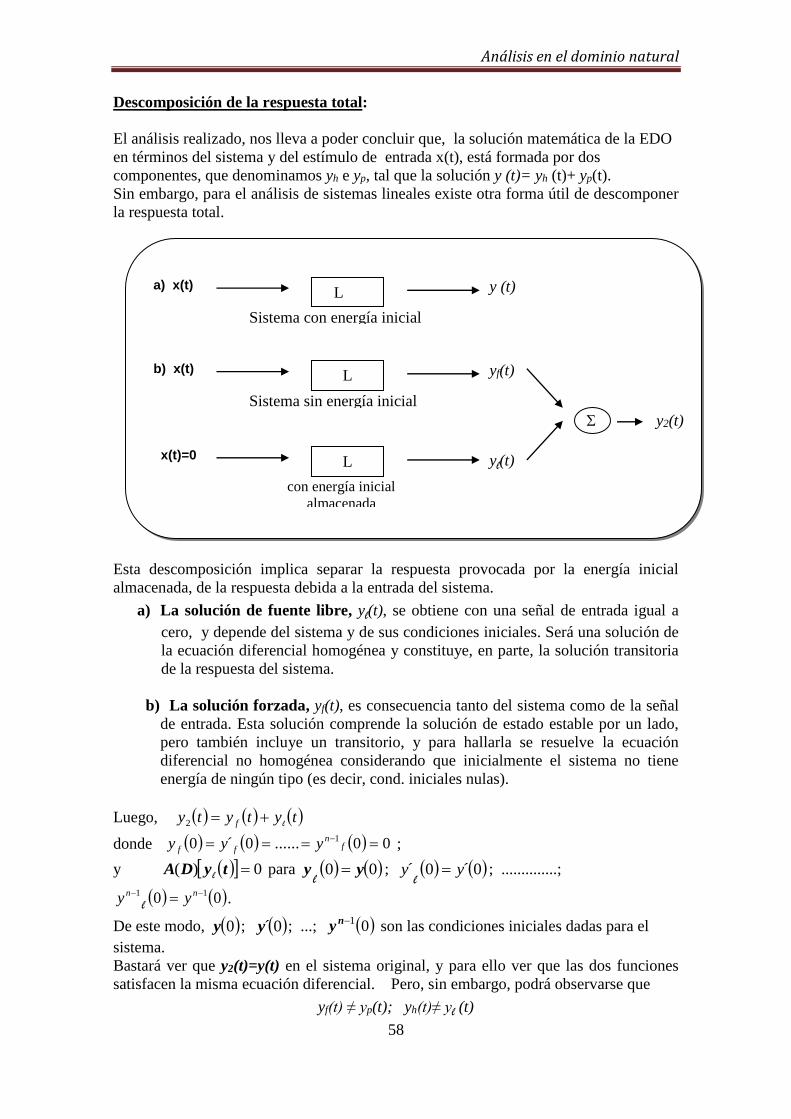
Análisis en el dominio natural
58
Descomposición de la respuesta total:
El análisis realizado, nos lleva a poder concluir que, la solución matemática de la EDO
en términos del sistema y del estímulo de entrada x(t), está formada por dos
componentes, que denominamos yh e yp, tal que la solución y (t)= yh (t)+ yp(t).
Sin embargo, para el análisis de sistemas lineales existe otra forma útil de descomponer
la respuesta total.
Esta descomposición implica separar la respuesta provocada por la energía inicial
almacenada, de la respuesta debida a la entrada del sistema.
a) La solución de fuente libre, yl(t), se obtiene con una señal de entrada igual a
cero, y depende del sistema y de sus condiciones iniciales. Será una solución de
la ecuación diferencial homogénea y constituye, en parte, la solución transitoria
de la respuesta del sistema.
b) La solución forzada, yf(t), es consecuencia tanto del sistema como de la señal
de entrada. Esta solución comprende la solución de estado estable por un lado,
pero también incluye un transitorio, y para hallarla se resuelve la ecuación
diferencial no homogénea considerando que inicialmente el sistema no tiene
energía de ningún tipo (es decir, cond. iniciales nulas).
Luego, tytyty f l2
donde 0000 1 f
n
ff y......yy ;
y 0)( tyDA l para 00 yy l
; 00 yy l
; ..............;
00 11 nn yyl .
De este modo, 0y ; 0´y ; ...; 01ny son las condiciones iniciales dadas para el
sistema.
Bastará ver que y2(t)=y(t) en el sistema original, y para ello ver que las dos funciones
satisfacen la misma ecuación diferencial. Pero, sin embargo, podrá observarse que
yf(t) ≠ yp(t); yh(t)≠ yl (t)
L a) x(t) y (t)
Sistema con energía inicial almacenada
L
b) x(t) yf(t)
Sistema sin energía inicial almacenada
L
x(t)=0 yl(t)
con energía inicial
almacenada
(condiciones iniciales
dadas)
y2(t)

Análisis en el dominio natural
59
En el siguiente ejercicio aclaramos aún más estos conceptos.
Ejercicio
Suponga la siguiente ecuación diferencial de primer orden, )()()(' txtyty .
Considere y(0)=1 y x(t) =3. La solución es
/te.)t(y 23 .
Cuyo gráfico se muestra en la figura
Esta solución, se puede encontrar utilizando el conocido método de la homogénea más
la particular, y entonces resulta como la suma de las funciones de la primera columna de
la siguiente tabla.
yp (t)=3
+
yh (t)=-2e-t
/.33)( t
f ety
+
yl (t)=e-t
Para desdoblar la solución como se muestra en la segunda columna puedo operar de la
siguiente forma:
Propongo, /t
f e.cc)t(y 21 , como forma para la solución forzada, con la entrada
aplicada y condiciones iniciales nulas. Puede verse que será solución de la ecuación
diferencial para todo c2 si c1=3:
33.)..(
)()()('.
1
/
21
/2
ceccec
txtyty
tt
ff
Y luego, aplicando condiciones iniciales nulas, se obtiene la otra constante:
/t
f
/t
f e.)t(yc,e.c)(y 333030 22
Por otro lado, la denominada componente libre, es una función que verifica la ecuación
diferencial homogénea con las condiciones iniciales dadas. Tenemos entonces:
yl (t)=c3e-tyl (0)=c3=1 yl (t)=e-t
______________________________________________________________________
0 2 4 6 8 10
-2
0
2
4
t [s]
Tau=1
Análisis en el dominio natural
60
CAUSALIDAD Y ESTABILIDAD SISTEMA CAUSAL Se dice que un sistema es causal o no anticipativo si la salida en el instante to solo
depende de la entrada para t ≤ to . Informalmente, podríamos decir que la entrada es la
causa de la salida. En otras palabras, la salida actual no depende de valores futuros de la
entrada. Intuitivamente, es claro que todo sistema mecánico o eléctrico de existencia
física en el mundo real es inherentemente causal.
Sin embargo, actualmente hay una cantidad de situaciones ingenieriles que requieren la
formulación de sistemas no-causales. Por ejemplo, la “inteligencia artificial” se basa
justamente en sistemas anticipativos. En muchos casos, se puede prevenir una salida, o
anticipar la decisión. Esto sucede en edificios inteligentes, seguimiento de satélites,
calefacción de ambientes, etc.
Para pensar: denominamos como “derivador puro” a un sistema que se define por la
relación: dt
tdxty
)( . Será éste un sistema causal?
SISTEMA ESTABLE Una descripción intuitiva del concepto de estabilidad es la siguiente. Suponga un
sistema en reposo, sin entrada ni salida. En un instante, se proporciona una entrada a ese
sistema, que podrá ser una energía eléctrica, mecánica, acústica o electromagnética. Si
la señal de entrada desaparece, luego de un cierto tiempo, o se mantiene en un valor
constante, el sistema será estable siempre que la señal de salida desaparezca, o se
mantenga en un valor finito, respectivamente. Si, por el contrario, la Señal de salida
crece y crece cuando la señal de entrada se mantiene acotada, entonces diremos que el
sistema es inestable.
Así, un criterio de estabilidad dice que, si la entrada de un sistema es acotada, la salida
es acotada. (BIBO).
Entonces, el sistema es estable si
para t,M)t(x , resulta que t,K)t(y , con M y K constantes reales.
Hemos visto que y(t) = yh(t) + yp(t) = tyc....tyctyc nn 2211 + yp(t)
Recuerde que yp(t) sigue la forma de la entrada, luego si la entrada es acotada ésta
también lo será. Sin embargo, el término general de la parte restante de la respuesta del
SLIT toma la forma tr
iiec .
La magnitud de este término es tjt
i
tj
i
tr
iiiiii eececec
)( t
iiec
, donde
i es la componente real de la raíz ri .
Si i >0, la magnitud del término se hace no acotada para t que tiende a infinito.
Contrariamente, si i es negativo, tenderá a cero.
Luego, será condición necesaria y suficiente para la estabilidad, que las raíces de la
ecuación característica del sistema estén en el semiplano izquierdo del plano
complejo z, o, dicho de otro modo, que tengan parte real negativa.
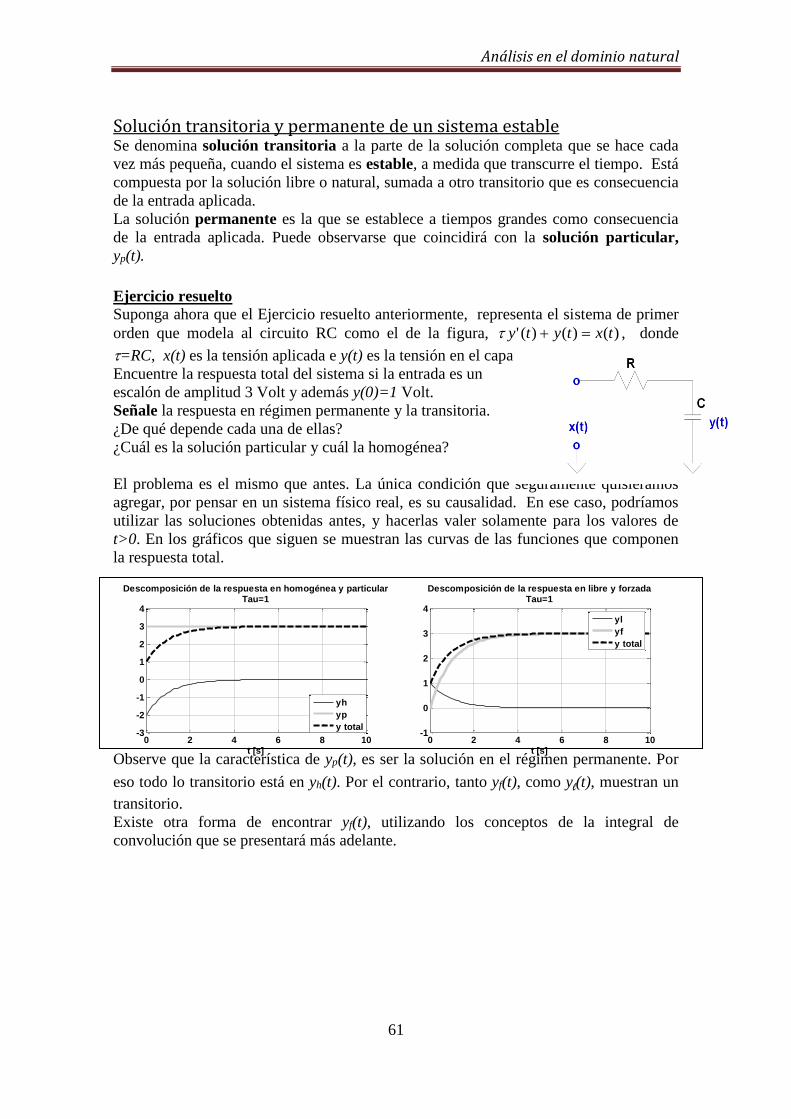
Análisis en el dominio natural
61
Solución transitoria y permanente de un sistema estable Se denomina solución transitoria a la parte de la solución completa que se hace cada
vez más pequeña, cuando el sistema es estable, a medida que transcurre el tiempo. Está
compuesta por la solución libre o natural, sumada a otro transitorio que es consecuencia
de la entrada aplicada.
La solución permanente es la que se establece a tiempos grandes como consecuencia
de la entrada aplicada. Puede observarse que coincidirá con la solución particular,
yp(t).
Ejercicio resuelto
Suponga ahora que el Ejercicio resuelto anteriormente, representa el sistema de primer
orden que modela al circuito RC como el de la figura, )()()(' txtyty , donde
=RC, x(t) es la tensión aplicada e y(t) es la tensión en el capacitor.
Encuentre la respuesta total del sistema si la entrada es un
escalón de amplitud 3 Volt y además y(0)=1 Volt.
Señale la respuesta en régimen permanente y la transitoria.
¿De qué depende cada una de ellas?
¿Cuál es la solución particular y cuál la homogénea?
El problema es el mismo que antes. La única condición que seguramente quisiéramos
agregar, por pensar en un sistema físico real, es su causalidad. En ese caso, podríamos
utilizar las soluciones obtenidas antes, y hacerlas valer solamente para los valores de
t>0. En los gráficos que siguen se muestran las curvas de las funciones que componen
la respuesta total.
Observe que la característica de yp(t), es ser la solución en el régimen permanente. Por
eso todo lo transitorio está en yh(t). Por el contrario, tanto yf(t), como yl(t), muestran un
transitorio.
Existe otra forma de encontrar yf(t), utilizando los conceptos de la integral de
convolución que se presentará más adelante.
0 2 4 6 8 10-3
-2
-1
0
1
2
3
4
t [s]
Descomposición de la respuesta en homogénea y particularTau=1
yh
yp
y total
0 2 4 6 8 10-1
0
1
2
3
4
Descomposición de la respuesta en libre y forzadaTau=1
t [s]
yl
yf
y total
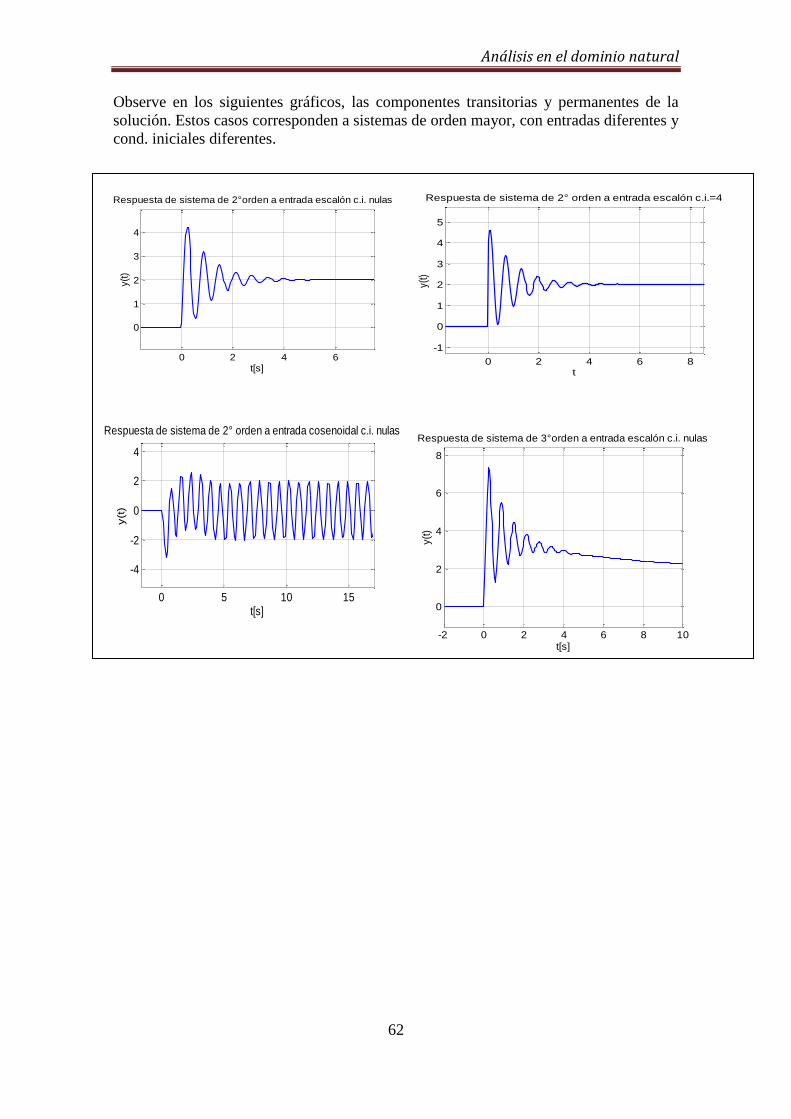
Análisis en el dominio natural
62
Observe en los siguientes gráficos, las componentes transitorias y permanentes de la
solución. Estos casos corresponden a sistemas de orden mayor, con entradas diferentes y
cond. iniciales diferentes.
0 5 10 15
-4
-2
0
2
4
t[s]
y(t
)
Respuesta de sistema de 2° orden a entrada cosenoidal c.i. nulas
-2 0 2 4 6 8 10
0
2
4
6
8
t[s]
y(t)
Respuesta de sistema de 3°orden a entrada escalón c.i. nulas
0 2 4 6
0
1
2
3
4
t[s]
y(t
)
Respuesta de sistema de 2°orden a entrada escalón c.i. nulas
0 2 4 6 8
-1
0
1
2
3
4
5
t
y(t)
Respuesta de sistema de 2° orden a entrada escalón c.i.=4
0 5 10 15
-4
-2
0
2
4
t[s]
y(t
)
Respuesta de sistema de 2° orden a entrada cosenoidal c.i. nulas
-2 0 2 4 6 8 10
0
2
4
6
8
t[s]
y(t
)
Respuesta de sistema de 3°orden a entrada escalón c.i. nulas
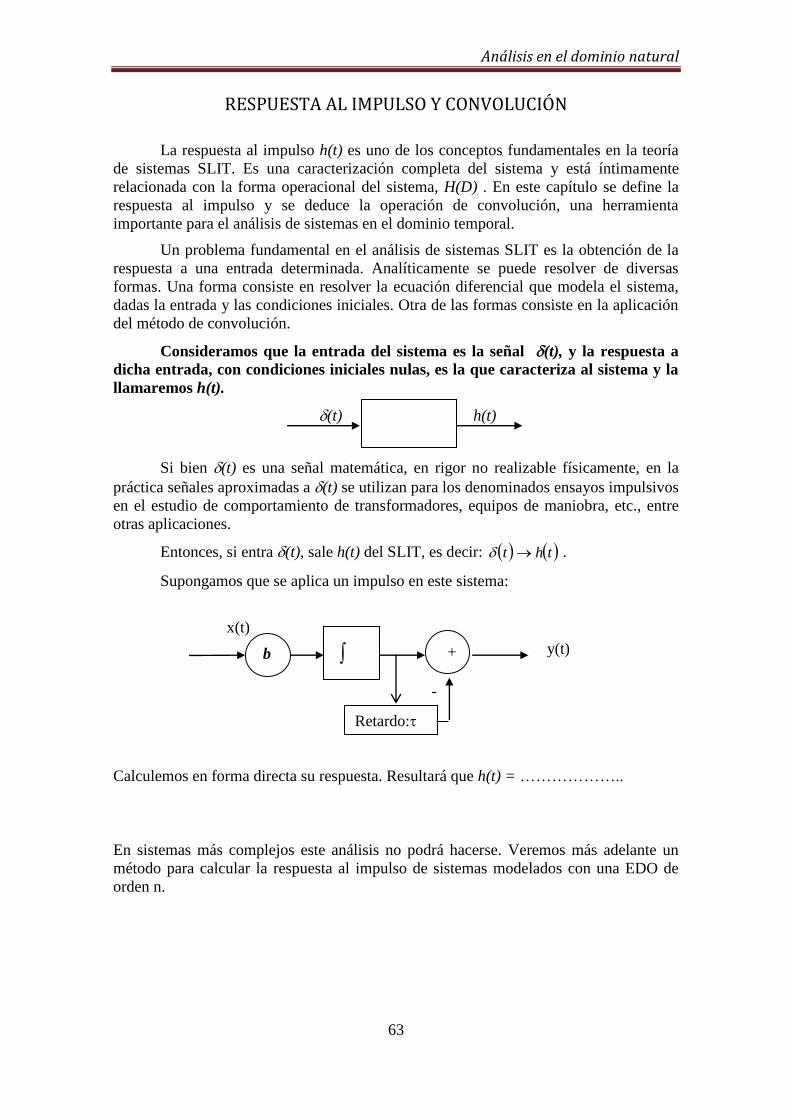
Análisis en el dominio natural
63
RESPUESTA AL IMPULSO Y CONVOLUCIÓN
La respuesta al impulso h(t) es uno de los conceptos fundamentales en la teoría
de sistemas SLIT. Es una caracterización completa del sistema y está íntimamente
relacionada con la forma operacional del sistema, H(D) . En este capítulo se define la
respuesta al impulso y se deduce la operación de convolución, una herramienta
importante para el análisis de sistemas en el dominio temporal.
Un problema fundamental en el análisis de sistemas SLIT es la obtención de la
respuesta a una entrada determinada. Analíticamente se puede resolver de diversas
formas. Una forma consiste en resolver la ecuación diferencial que modela el sistema,
dadas la entrada y las condiciones iniciales. Otra de las formas consiste en la aplicación
del método de convolución.
Consideramos que la entrada del sistema es la señal (t), y la respuesta a
dicha entrada, con condiciones iniciales nulas, es la que caracteriza al sistema y la
llamaremos h(t).
Si bien (t) es una señal matemática, en rigor no realizable físicamente, en la
práctica señales aproximadas a (t) se utilizan para los denominados ensayos impulsivos
en el estudio de comportamiento de transformadores, equipos de maniobra, etc., entre
otras aplicaciones.
Entonces, si entra (t), sale h(t) del SLIT, es decir: tht .
Supongamos que se aplica un impulso en este sistema:
Calculemos en forma directa su respuesta. Resultará que h(t) = ………………..
En sistemas más complejos este análisis no podrá hacerse. Veremos más adelante un
método para calcular la respuesta al impulso de sistemas modelados con una EDO de
orden n.
(t) h(t)
-
x(t)
b
∫ y(t) +
Retardo:
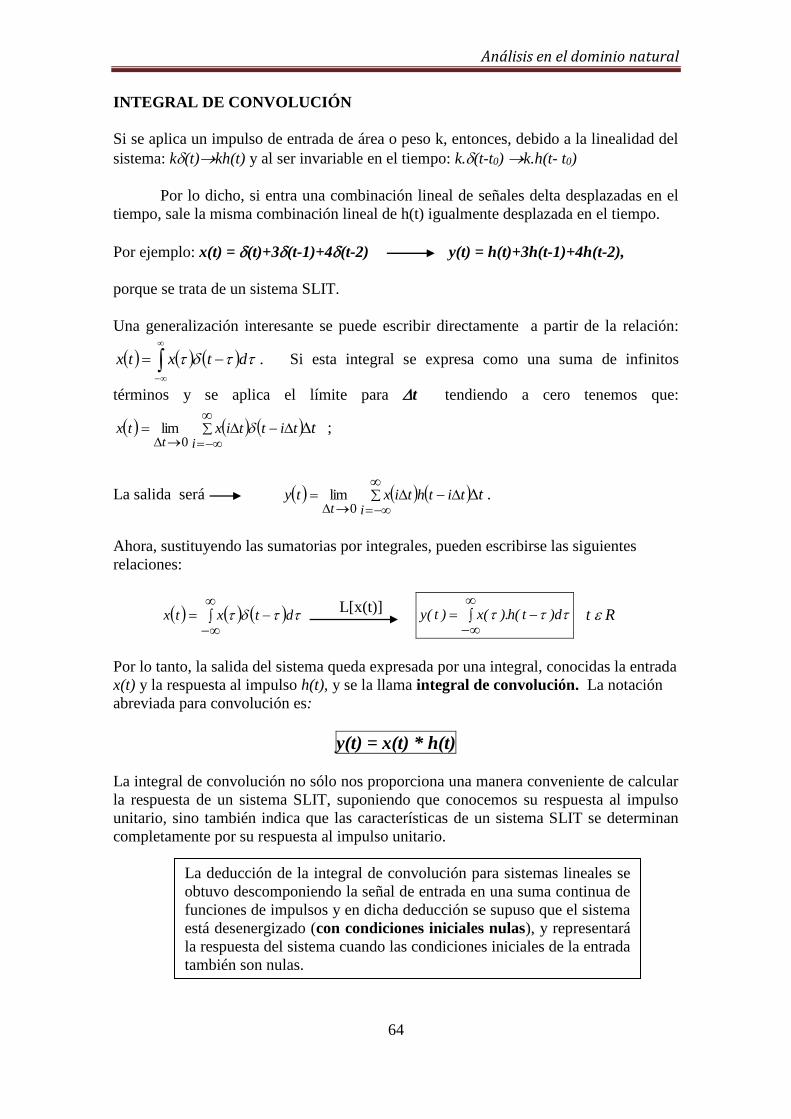
Análisis en el dominio natural
64
INTEGRAL DE CONVOLUCIÓN
Si se aplica un impulso de entrada de área o peso k, entonces, debido a la linealidad del
sistema: k(t)kh(t) y al ser invariable en el tiempo: k.(t-t0) k.h(t- t0)
Por lo dicho, si entra una combinación lineal de señales delta desplazadas en el
tiempo, sale la misma combinación lineal de h(t) igualmente desplazada en el tiempo.
Por ejemplo: x(t) = (t)+3(t-1)+4(t-2) y(t) = h(t)+3h(t-1)+4h(t-2),
porque se trata de un sistema SLIT.
Una generalización interesante se puede escribir directamente a partir de la relación:
dtxtx . Si esta integral se expresa como una suma de infinitos
términos y se aplica el límite para t tendiendo a cero tenemos que:
tit
tittixtx
0lim ;
La salida será tit
tithtixty
0lim .
Ahora, sustituyendo las sumatorias por integrales, pueden escribirse las siguientes
relaciones:
dtxtx d)t(h.)(x)t(y
t R
Por lo tanto, la salida del sistema queda expresada por una integral, conocidas la entrada
x(t) y la respuesta al impulso h(t), y se la llama integral de convolución. La notación
abreviada para convolución es:
y(t) = x(t) * h(t)
La integral de convolución no sólo nos proporciona una manera conveniente de calcular
la respuesta de un sistema SLIT, suponiendo que conocemos su respuesta al impulso
unitario, sino también indica que las características de un sistema SLIT se determinan
completamente por su respuesta al impulso unitario.
L[x(t)]
La deducción de la integral de convolución para sistemas lineales se
obtuvo descomponiendo la señal de entrada en una suma continua de
funciones de impulsos y en dicha deducción se supuso que el sistema
está desenergizado (con condiciones iniciales nulas), y representará
la respuesta del sistema cuando las condiciones iniciales de la entrada
también son nulas.

Análisis en el dominio natural
65
Propiedades: La convolución entre 2 señales cualesquieras es:
conmutativa,
asociativa,
distributiva
Demostración de la propiedad conmutativa:
th*txdthxty
Si ts st y dsd , s , s
dsshstxdsshstxty h(t)*x(t) (Si hacemos un cambio formal
de la variable s por , por lo tanto: t * xt h t*ht x ty
Ejercicio: Hallar la convolución de la t con la respuesta al impulso.
Si ttx thth*tty
pues thdthdthxty
En general: para cualquier f(t) , será tft*δtf pues: tfdtf
.
Análogamente, puede escribirse otra relación de utilidad como:
000 ttgt*ttgtt*tg
OBSERVACION: Debido a que en muchas aplicaciones, la respuesta al impulso es una
función causal, es decir h(t) = 0 para t < 0, en estos casos sería:
h(t-)= 0 para t -< 0 > t
y se puede cambiar el límite de integración, en vez de infinito por t. Si x(t) también es
causal el límite inferior cambia por 0. Así se pueden presentar 4 casos posibles:
dthxty th,tx general
t
dthxty
0
th,tx causal (pero no señales tipo pulsos)
Estabilidad de un sistema BIBO (Bounded-input, bounded-output: entrada acotada,
salida acotada)

Análisis en el dominio natural
66
Sea ;t,M)t(x con M una constante real.
Interesa analizar la cota de la salida del sistema. Para ello, se aplica el concepto de valor
absoluto a ambos miembros de la igualdad dada por la integral de convolución, y se
obtiene que:
d)(h).t(xd)(h).t(x)t(y ,
Luego, si se introduce la condición de la cota de la entrada, se obtiene que:
d)(h:siadacotaestá)t(yfinitoM,d)(hM)t(y ; si h(t)
satisface esta condición se dice que es absolutamente integrable.
Para un sistema LTI causal, el criterio se reduce a:
0
dt)t(h
Ejercicio: Determinar la estabilidad del sistema SLIT que tiene la respuesta al impulso
dada por h(t) = e-3tus(t).
Como h(t) es causal, verificamos la convergencia absoluta de la siguiente integral:
3
1
3
1
3
1
3 30
3
0
3
0
3
AA
At
A
ts
t
elim
elimdtedt.)t(ue .
Cálculo de la integral de convolución
La integral de convolución es un cálculo que puede ser operativamente complicado
cuando las señales son continuas por tramos.
Debe tenerse presente que es la variable de integración, y que t pasa a actuar como
parámetro a los fines de integrar. La integral debe evaluarse para todos los posibles
valores reales de t.
Para pasar de x(t) a x() se hace un cambio de variables, y para obtener h(-) se hace
un cambio de variables de h(t) y una reflexión.
Para encontrar h(t-) basta con desplazar horizontalmente h(-) según sean los valores
de t, si t > 0 hacia la derecha y si t < 0 se mueve hacia la izquierda.
Ejercicios:
1) Sea x(t) = u(t) y h(t) = e-t.u(t). Encontrar la salida y(t)
Respuesta: 01 tparae)t(y t
2) Hallar la convolución x(t)*h(t), siendo x(t)=u(t)-u(t-4) y h(t) = e-2t.u(t)

Análisis en el dominio natural
67
Respuesta:
412
1
402
1
2
1
00
82
2
tsi).(e.e
tsi.e
tsi
)t(y
t
t
3) Resolver x(t)*h(t), siendo:
casosotros
t)t(x
0
202 y
casosotros
t
t
)t(h
0
433
301
Respuesta:
60
65366
54162
4384
324
202
00
tsi
tsit
tsit
tsit
tsi
tsit
tsi
)t(y
Análisis en el dominio natural
68
Causalidad y estabilidad en relación a la respuesta al impulso del sistema.
La integral de convolución puede utilizarse para ilustrar el requerimiento de
causalidad.
Considere que la señal x(t) de la figura es la entrada de un SLIT con una respuesta al
impulso, h(t)= us(t+2). ¿Cuál es la salida del sistema si hay condiciones iniciales
nulas?
Sabemos ahora, que la misma puede calcularse convolucionando las 2 señales.
Grafique las señales y el resultado de la convolución. Observe que la respuesta del
sistema se anticipa a la entrada.
Cálculo de la respuesta al impulso para sistemas causales
A continuación se presenta un método sencillo y poderoso para encontrar la respuesta al
impulso de sistemas lineales causales descriptos por una ecuación diferencial. Este
método se basa en el conocimiento de las soluciones homogéneas de la ecuación.
Supongamos primeramente una ecuación donde el lado derecho corresponde a la
entrada, y no existen derivadas sobre ella, y donde an = 1 :
txtyaDa....DaDty)D(A nn
n 011
1 (A)
Para la respuesta al impulso, h(t), se tendrá que x(t) = (t) y condiciones iniciales
nulas:
0000 1 ny...yy .
Puede probarse que la función respuesta al impulso debe satisfacer la ecuación
homogénea
0ty)D(A
con condiciones iniciales:
100000 12 nn h;h....hh (I)
Así:
tutyctyctycth nn ..2211
donde las condiciones iniciales (I) se emplean para calcular los nc .
x(t) h(t) y(t)
2 * =
-2 -1 0 1 2 -2 -1 0 1 2 -3 -2 -1 0 1 2

Análisis en el dominio natural
69
Prueba: La solución de (A) puede expresarse como: dthxty
t
0
(B)
cuando thtx , son causales.
Por el teorema de la derivación bajo el signo integral * pueden obtenerse expresiones
para las derivadas sucesivas de (B):
* La Regla de Leibniz y varios teoremas asociados, permiten afirmar que es legítimo derivar bajo el
signo integral cuando el integrando es función continua del grupo de variables y parámetros. Entonces
para una función f integrable sobre el intervalo [a,b], se define F sobre [a,b]
como
)t(v
)t(u
d),t(f)t(F , entonces F es derivable. Consecuencia directa es la siguiente
igualdad:
)t(v
)t(u
)t(v
)t(u
d),t(fdt
d)t('u))t(u,t(f)t('v))t(v,t(fd),t(f
dt
d
En nuestro caso, v(t)=t , u(t)=0. Entonces:
tt
dtfdt
dttfdtf
dt
d
00
),(),(),(
Pero además, f(t,τ)=x(τ)*h(t- τ). Entonces:
t
t
t
dthxdt
dthxdthx
dt
dty
00
)]()([)()()('
Resulta:
dthxhtxty
t
0
'0' . (C)
Como y’(0)=0 , de (C) resulta que 00 h , y entonces: dthxty
t
0
'' (C-
1)
Si volvemos a aplicar la Regla de Leibniz a (C-1), obtenemos la expresión para la
derivada segunda:
dt''hx'htxdt''hxt'hxt''ytt
t
00
0 (C-2)
dxthtxhtyt
nnn
0
1 0 .
Supóngase el caso más sencillo de un sistema de segundo orden como por ejemplo:
txtyDD 122 (D)
Como y’(0)=0 , de (C) resulta que 00 h .

Análisis en el dominio natural
70
Ahora, se utilizan (C-1) y (C-2) para verificar la (D). Combinándolas resulta:
dt''hx'htx
t
0
0 + dt'hxt
0
2 + )t(xdthxt
0
La que puede rescribirse como:
)('2''0'0
txdthxthxthxhtx
t
Se observa que la ecuación se verifica si:
10 h
. 02
0
d)t(ht'ht''hx
t
La segunda relación es cero si el integrando es cero, y considerando que 0)t(x ,
entonces deberá ser )t(ht'ht''h 2 =0.
Luego, h(t) será solución de la ecuación homogénea y debe cumplir que
00 h y que 10 h .
La generalización de esta demostración lleva a lo enunciado al comienzo de la sección
para los sistemas de orden n.
OBSERVACION: Si el lado derecho de la EDO que modela al sistema es de la
forma: B(D)[x(t)], A(D)[y(t)] = B(D)[x(t)], el método para encontrar la respuesta al
impulso se modifica.
Se obtiene primero una th que corresponda al sistema A(D)[y(t)] = x(t) y
luego la respuesta al impulso es: h(t) = B(D)[ th ]. Todo esto sobre la suposición de
que el orden de B(D)es menor al de A(D); de no ser así, aparecerán en h(t) términos
adicionales que incluirán a (t) y sus derivadas, pues las derivadas de h(t) de orden (n-1)
o mayor, en general no son cero en t = 0.
Ejercicios:
1) Dado: A(D)[y(t)]=(D2+2D+2)[y(t)]=x(t), hallar una expresión integral para
y(t), si y(0)=y’(0)=0.
. . . . . . . . . . . . . .
2) Verificar que: (D2+2D+2)[h(t)]=(t)
. . . . . . . . . . . . . .
3) Considere el circuito de la figura. Sea la señal de excitación x(t). Considere a
la tensión en el capacitor como la salida del sistema. La ecuación diferencial
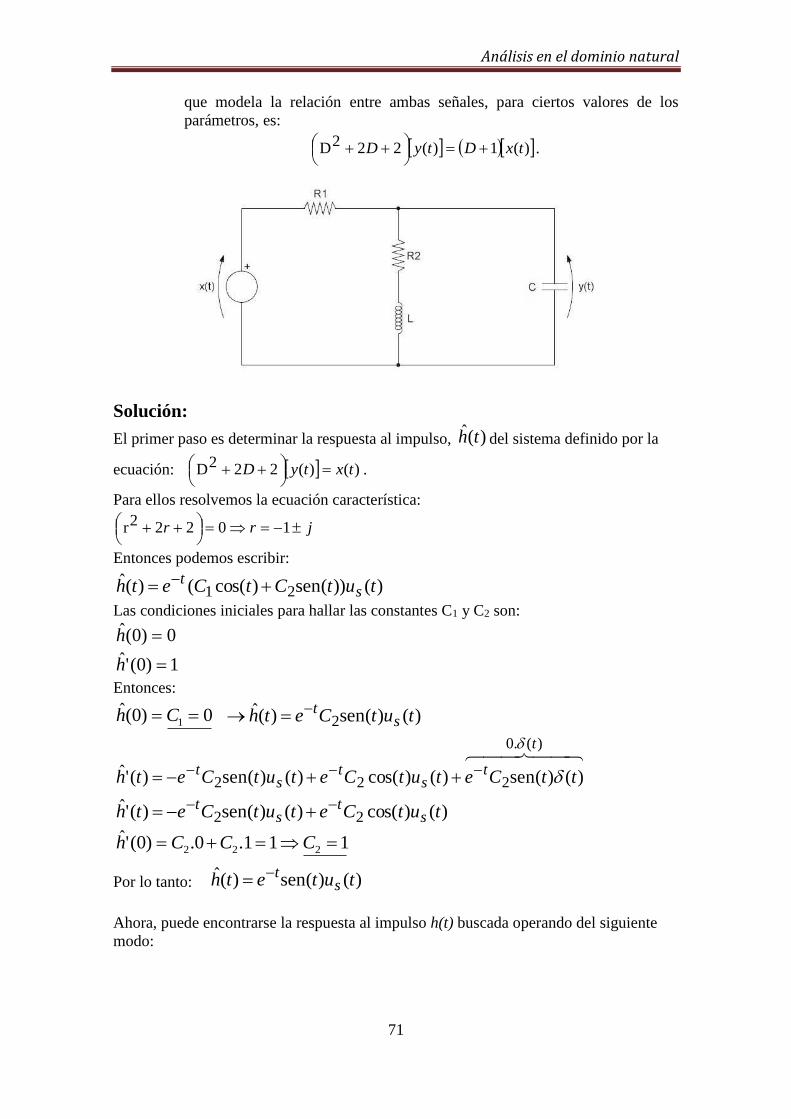
Análisis en el dominio natural
71
que modela la relación entre ambas señales, para ciertos valores de los
parámetros, es:
)(1)(222D txDtyD
.
Solución:
El primer paso es determinar la respuesta al impulso, )(ˆ th del sistema definido por la
ecuación: )()(222D txtyD
.
Para ellos resolvemos la ecuación característica:
jrr
10222r
Entonces podemos escribir:
)())(sen)cos(()(ˆ 21 tutCtCeth st
Las condiciones iniciales para hallar las constantes C1 y C2 son:
0)0(ˆ h
1)0('ˆ h
Entonces:
0)0(ˆ 1 Ch )()(sen)(ˆ 2 tutCeth st
)(.0
222 )()(sen)()cos()()(sen)('ˆ
t
ts
ts
t ttCetutCetutCeth
)()cos()()(sen)('ˆ 22 tutCetutCeth st
st
111.0.)0('ˆ 222 CCCh
Por lo tanto: )()(sen)(ˆ tuteth st
Ahora, puede encontrarse la respuesta al impulso h(t) buscada operando del siguiente
modo:

Análisis en el dominio natural
72
)()cos()()(sen)()(sen)()cos()()(
)()(sen1)(ˆ1)(
tuttetuttetttetuttetutsente
tutteDthDth
ssss
s
Entonces, para este sistema, y con condiciones iniciales nulas, la salida y(t) puede
expresarse como:
t
t dxtety0
)( ,)()cos()( 0t
Considerando ahora el caso particular en que x(t) es un escalón unitario de entrada, se
tendrá que,
t
t dtety
0
)( ,)cos()( 0t
0,0
0)),(cos)(sen1(2
1
cos
0 t
ttetede
ttt
A partir de la h(t) calculada se puede demostrar que se cumple la siguiente igualdad:
)(1)(22 2D tDthD
)(1)()cos(222D tDts
utteD
)()())()(cos(
)(.1
)()cos()())()cos()()cos(
tts
utsentte
t
tttets
utsentettets
utteD
)(')()()(2)('
)().1(
)())()(cos(
)())cos()()(())()(cos()()cos(2
ttts
utsentet
t
ttsentte
ts
uttsents
utetsenttets
utteD
Reemplazando:
)]()[1()(')()(')()()cos(2)(2)()(2
)()cos(2)()(2))()cos((2))()())()(cos((2
)(')()()(2()cos(22 2D
tDttttts
uttetts
utsente
ts
uttets
utsentetutetts
utsentte
ttts
utsentets
utteD
s
t
Vemos que se verifica la igualdad.
Relación entre la respuesta al escalón y la respuesta al impulso
La respuesta al escalón de un sistema lineal g(t), es la salida provocada por la función
escalón us(t) como entrada. Así si L representa la transformación realizada por el
sistema lineal, entonces: g(t) = L[us(t)].

Análisis en el dominio natural
73
La g(t) se puede obtener convolucionando us(t)*h(t) = g(t), de donde, si el sistema es
causal, será:
g(t) = us (t)*h(t) = t tt
ss d).(hd).t(u).(hd).t(h).(u
0 00
, entonces:
La respuesta al escalón de un sistema lineal es la integral de su respuesta al
impulso.
Podemos verificar por diferenciación de g(t) y obtener así, la respuesta al impulso:
tt
s thdthddt
tduh
dt
tdg
00
)()().()(
).()(
Ejercicio: escriba la expresión integral que resulta para g(t) en el caso en que el sistema
sea no-causal.
. . . . . . . . . . . . . . . . . . . . . . . .
Ejemplo: Sea h(t) = e-3t.us(t). La respuesta al escalón unitario es:
g(t) = )t(u.ede st
t3
0
3 13
1 , por lo tanto resulta: )t(u.e)t(g st31
3
1
Este resultado se puede verificar por diferenciación de g(t) y obtener la respuesta al
impulso, tal como se muestra a continuación:
)t(u.e)t(.e.)t(u.e..)t(.e
dt
)t(u.ed
)t(h stt
stt
st
3333
3
3
1
3
13
3
11
3
11
3
1
Finalmente aplicando las propiedades de la )t( , obtenemos:
)t(u.e)t(.)t(h s
t3
3
1
3
1 )t(u.e)t(h s
t3 .
Análisis en el dominio natural
74
Respuesta permanente a funciones exponenciales de entrada
La respuesta de sistemas lineales a funciones de entrada que sean funciones
exponenciales permanentes en el tiempo, son de especial importancia en el análisis de
sistemas lineales ESTABLES.
Sea: x(t) d)t(h.)(x)t(y
.
Demostrar que la respuesta de un sistema lineal e invariable a una función exponencial,
también es una función exponencial y proporcional a la entrada.
Si x(t) = ejt , entonces y(t) = ejt H(D=j)
Observar que ejt es una función periódica con frecuencia y período T=2/La
frecuencia de la señal de entrada se mantiene en la señal de salida. H(D=j) es un
número complejo que en general modificará en módulo y ángulo a la función
exponencial compleja. Podría también tomar valor nulo para algunos valores de , y en
ese caso la señal de salida sería nula.
Vale aclarar que H(D=j) es la función operacional del sistema H(D) donde se hace la
sustitución D=j. Llamamos ¨Función del sistema¨ a Hj).
Demostración : …………………………………………….
………………………………………………………….
Ejercicio:
Extienda el resultado anterior, para el caso de entradas del tipo sen(t) o cos(t).
LTI
Análisis en el dominio natural
75
REPRESENTACION DE SISTEMAS LINEALES
MEDIANTE VARIABLES DE ESTADO
Hemos visto anteriormente que un Sistema LTI puede ser caracterizado por una
ecuación diferencial de orden n, o alternativamente por su respuesta al impulso th .
Hemos visto también que existen métodos para encontrar la respuesta ty , para 0tt a
una entrada tx válida para 0tt , para un conjunto dado de condiciones iniciales, a
partir de la ecuación diferencial. Por otro lado, analizamos que la respuesta ty a una
entrada tx puede encontrarse mediante la integral de convolución, utilizando la
respuesta al impulso.
Estudiaremos ahora la representación mediante variables de estado, la que presenta un
método alternativo para resolver sistemas LTI con las siguientes ventajas:
1. Permite conocer no sólo el comportamiento de la entrada y la salida del sistema, sino
también el de las variables internas del mismo.
2. Se puede adaptar fácilmente para su solución utilizando computadoras.
3. Se puede extender a sistemas no lineales o variantes en el tiempo.
4. Permite manejar sistemas con múltiples entradas y salidas.
En este capítulo se verá la formulación en variables de estado. Así, un sistema lineal
modelado con una ecuación diferencial ordinaria de orden n, podrá representarse por
medio de un sistema de n ecuaciones diferenciales de primer orden acopladas. El
modelo obtenido se denomina modelo de estados.
Concepto de estado
Se define estado del sistema en algún tiempo t0 a la información que, junto con todas
las entradas para todos los tiempos subsiguientes a t0, determina el comportamiento del
sistema para t t0 , Es decir, es la información “suficiente” acerca del sistema en algún
instante t0 , en el sentido de que permite el cálculo de las salidas del sistema para todo
tiempo posterior a t0. Las variables que contienen esta información se conocen como
variables de estado. En otras palabras, el conocimiento del estado del sistema en t0,
basta para predecir el comportamiento futuro del sistema, siendo innecesaria alguna
información acerca del comportamiento anterior del sistema.
Ejemplos introductorios
Para introducir el modelado en variables de estado se partirá de un caso particular.
1) Considere un circuito serie RLC, cuya descripción matemática está dada por las
ecuaciones:

Análisis en el dominio natural
76
Ldi t
dtRi t v t v tc i
( )( ) ( ) ( )
v tC
i dc
t
( ) ( )
1
donde vi (t) es la tensión de entrada, conocida, y la corriente i(t) y la tensión en el
capacitor
vc (t) son las variables desconocidas.
a) Se reescribe la segunda ecuación para que quede en forma diferencial:
dv t
dt Ci t
c ( )( )
1
b) Se definen 2 variables de estado, o simplemente 2 estados, con la notación xi(t) :
x1(t) = i(t)
x2(t) = vc(t)
Sustituyendo con la nomenclatura elegida, y despejando, se llega al siguiente sistema
acoplado:
( ) ( ) ( ) ( )x tR
Lx t
Lx t
Lv ti1 1 2
1 1
)(1
)( 12 txC
tx
c) Se escribe la ecuación que relacione la salida del sistema con las variables de estado.
En este caso, la salida es vc(t) , luego, la ecuación que falta es:
y(t)= vc(t)=x2(t)
d) La formulación se simplifica si se utiliza notación matricial, en donde la entrada, vi(t)
es denominada como u(t) :
)t(u
0L
1
)t(x
)t(x
0C
1L
1
L
R
)t(x
)t(x
2
1
2
1
)t(x
)t(x.10)t(y
2
1.

Análisis en el dominio natural
77
Estas dos ecuaciones matriciales son las ecuaciones de estado para el circuito RLC.
Esta representación puede no ser única; ello depende de qué variables se definan como
estados.
En general, la forma estándar para las ecuaciones de estados de un SLIT es:
x(t) Ax(t) Bu(t)
y(t) Cx(t) Du(t)
, (1)
donde la notación es la siguiente:
x(t) : Vector de estados de dimensión (n x 1) para un sistema de orden n
u(t) : Vector entrada (r x 1) correspondiente al vector de entradas al sistema
y(t) : Vector salida (p x 1) compuesto por las señales de salida del sistema.
A : Matriz cuadrada (n x n) es la matriz del sistema
B: Matriz de entrada (n x r). Relaciona los estados con las entradas
C : Matriz de salida (p x n). Relaciona los estados con las salidas
D: Matriz de orden (p x r) que representa el acoplamiento entre las entradas del sistema
y las salidas.
2) Considere ahora el sistema de la figura formado por 2 resortes y 2 masas, al que se
le aplica una fuerza externa f(t).
2-1) Verifique que el modelo matemático está dado por el siguiente sistema de
ecuaciones de segundo orden.
)t(z)t(zk)t(zkdt
)t(zdm 122112
12
1
)t(f)t(z)t(zkdt
)t(zdm 1222
22
2
2-2) Verifique también que el siguiente sistema es equivalente al anterior.
Escríbalo en forma matricial, considerando que m1=2, m2=1, k1=4, k2=2 y
f(t)=40sen3t.
t3senxxx
xx
xxx
xx
4022
3
314
43
312
21
2-3) Defina 1 entrada y 1 salida para este sistema. Escriba 1 ecuación más que
represente la relación entre la salida y los estados. Por ejemplo,
u(t)=f(t)
k1 m1 k2 m2
z1(t) z2(t)
f(t)
Análisis en el dominio natural
78
y(t)=z2(t)=x3(t)
Obtención del modelo de variables de estado para sistemas de 1 entrada y 1 salida (SISO) a partir de la EDO de orden “n”
Caso 1: Se considera primero un caso particular que aparece con frecuencia. Sea el
sistema de una entrada y una salida representado por la ecuación diferencial
)t(ub)t(yadt
)t(yda
dt
)t(ydn
n
nn
n
001
1
1
. (2)
Se observa que el lado derecho de la ecuación no contiene derivadas, y que an=1. Las
componentes del vector de estados se pueden definir como las salidas de cada integrador,
si se realizara el diagrama de bloques correspondiente, como se verá más adelante. Sin
embargo, por ser este un caso más simplificado, la denominación de las variables se
puede realizar directamente, obteniendo el mismo resultado, del siguiente modo.
Llame:
(3)
A partir de esta definición será cierto también que:
( ) ( )( )x t y tnn ,
y despejando de la ecuación (2), resulta entonces que
( ) ( ) ( ) ( )x t b u t a x t a x tn n n 0 0 1 1 (4)
Rescribiendo el sistema (3) y agregando la ecuación (4) resulta la forma final, dada por:
( ) ( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
x t x t
x t x t
x t x t
x t b u t a x t a x t
n n
n n n
1 2
2 3
1
0 0 1 1
(5)
La salida del sistema en términos de las variables de estado, resulta:
y(t)=x1(t) (6)
x t y t
x t y t x t
x t y t x t
x t y t x tnn
n
1
2 1
3 2
11
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )( )
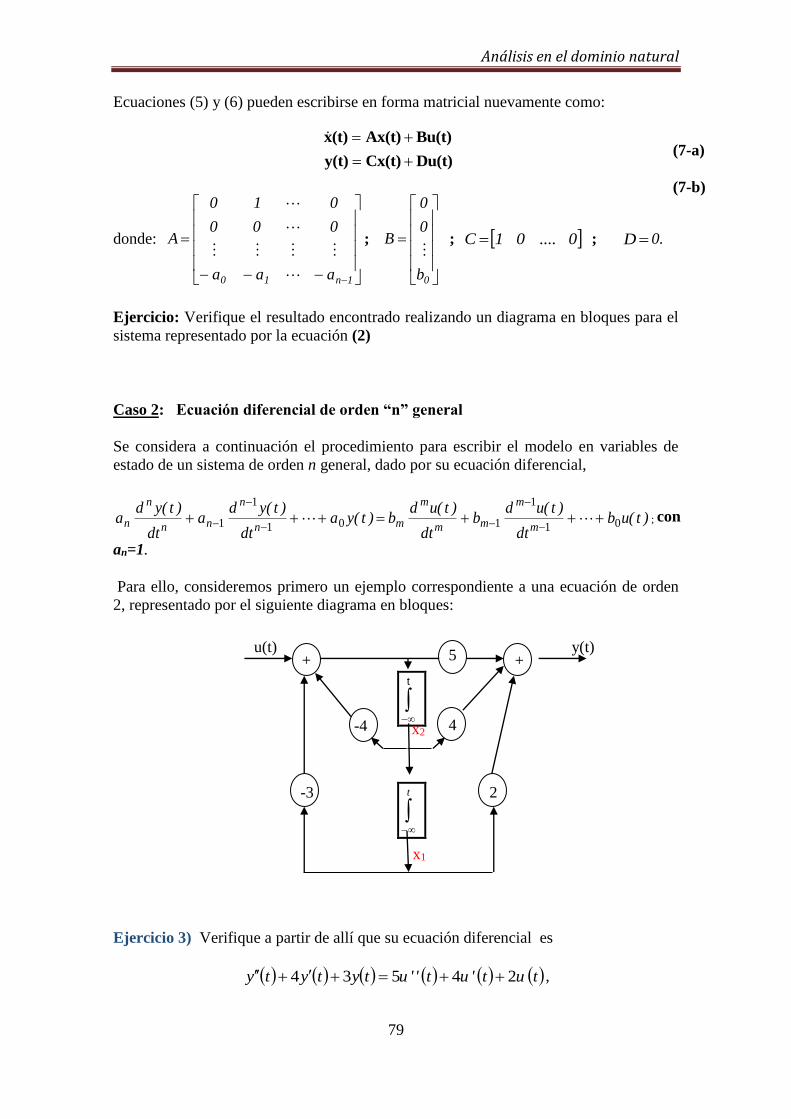
Análisis en el dominio natural
79
Ecuaciones (5) y (6) pueden escribirse en forma matricial nuevamente como:
x(t) Ax(t) Bu(t)
y(t) Cx(t) Du(t)
donde:
1n10 aaa
000
010
A
;
0b
0
0
B
; 0....01C ; D 0.
Ejercicio: Verifique el resultado encontrado realizando un diagrama en bloques para el
sistema representado por la ecuación (2)
Caso 2: Ecuación diferencial de orden “n” general
Se considera a continuación el procedimiento para escribir el modelo en variables de
estado de un sistema de orden n general, dado por su ecuación diferencial,
)t(ubdt
)t(udb
dt
)t(udb)t(ya
dt
)t(yda
dt
)t(yda
m
m
mm
m
mn
n
nn
n
n 01
1
101
1
1
; con
an=1.
Para ello, consideremos primero un ejemplo correspondiente a una ecuación de orden
2, representado por el siguiente diagrama en bloques:
Ejercicio 3) Verifique a partir de allí que su ecuación diferencial es
tut'ut''utytyty 24534 ,
(7-a)
(7-b)
t
t
+ +
-4
-3
4
2
x2
x1
u(t) y(t) 5
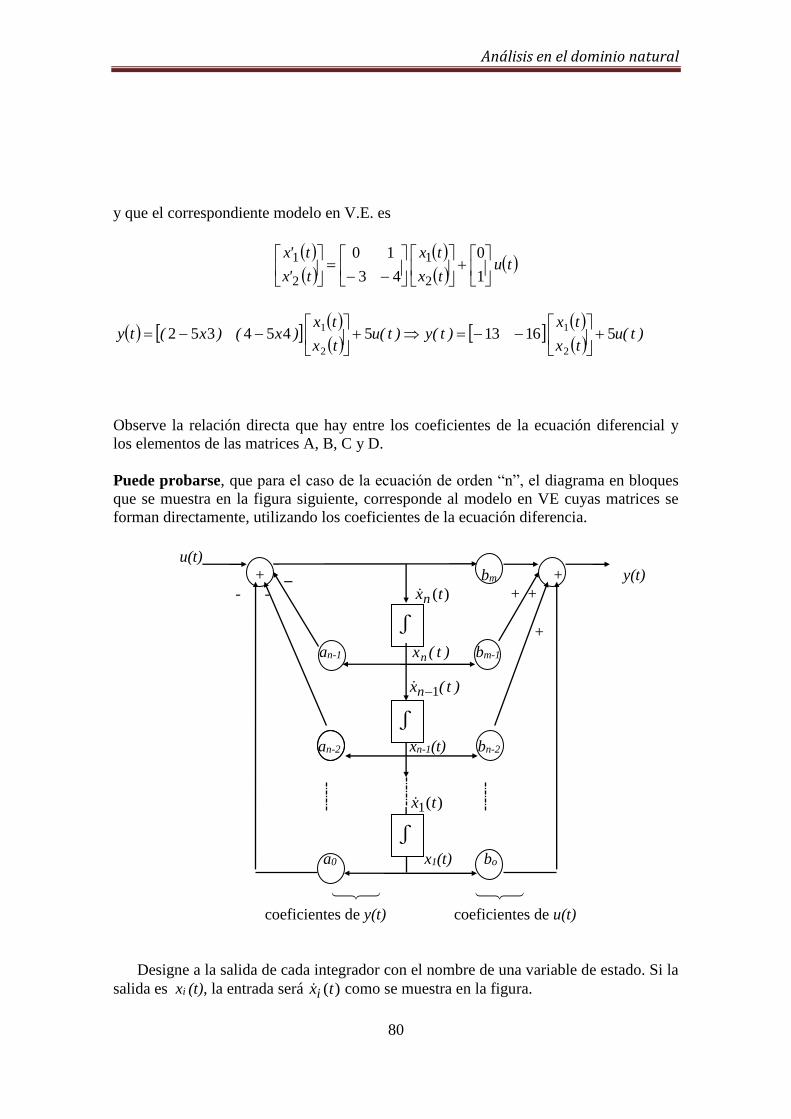
Análisis en el dominio natural
80
y que el correspondiente modelo en V.E. es
tu
tx
tx
t'x
t'x
1
0
43
10
2
1
2
1
)t(u
tx
tx)t(y)t(u
tx
tx)x()x(ty 5 16135 454352
2
1
2
1
Observe la relación directa que hay entre los coeficientes de la ecuación diferencial y
los elementos de las matrices A, B, C y D.
Puede probarse, que para el caso de la ecuación de orden “n”, el diagrama en bloques
que se muestra en la figura siguiente, corresponde al modelo en VE cuyas matrices se
forman directamente, utilizando los coeficientes de la ecuación diferencia.
coeficientes de y(t) coeficientes de u(t)
Designe a la salida de cada integrador con el nombre de una variable de estado. Si la
salida es xi (t), la entrada será ( )x ti como se muestra en la figura.
u(t)
+ _ bm + y(t)
- - ( )x tn + +
+
an-1 )t(xn bm-1
( )x t1
a0 x1(t) bo
ʃ
)t(xn 1
an-2 xn-1(t) bn-2
ʃ
ʃ

Análisis en el dominio natural
81
1. Escriba las ecuaciones para las señales de entrada de cada integrador:
( ) ( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( ) ( )
x t x t
x t x t
x t x t
x t a x t a x t a x t u t
n n
n n n
1 2
2 3
1
0 1 1 2 1
2. Escriba la ecuación para la salida del sistema:
y t b a b x t b a b x t b a b x t b u tn n n n n n n( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 0 0 1 1 1 2 1 1
3. Escriba las ecuaciones en forma matricial. La forma del modelo que se obtiene
siguiendo este procedimiento es conocida como Segunda forma canónica o Forma
canónica de la variable de fase :
x(t)
0 1 0 0 0
0 0 1 0 0
0 0 0 0 1
x(t)
0
0
0
1
u(t)
a a a a an n0 1 2 2 1
(8)
y(t) x(t) u(t) ( ) ( ) ( )b a b b a b b a b bn n n n n n0 0 1 1 1 1 (9)
Como puede verse, esta expresión puede escribirse directamente a partir de la ecuación
diferencial ubicando los coeficientes en las posiciones correctas en la matriz. Se verá
más adelante, que lo mismo puede hacerse a partir de la función de transferencia.
El procedimiento puede aún simplificarse si después de la designación de las variables,
se omite el dibujo de los integradores.
Ejercicio 4:
I) Modifique el ejercicio anterior, (Ej 3) considerando b 2=0 . Encuentre el
Modelo en VE denominado de la 2da. forma canónica.
Si b 2=0, la ec. diferencial es tut'utytyty 2434 y las
matrices del modelo serán:
A=……… ; B= ;C= ; D=
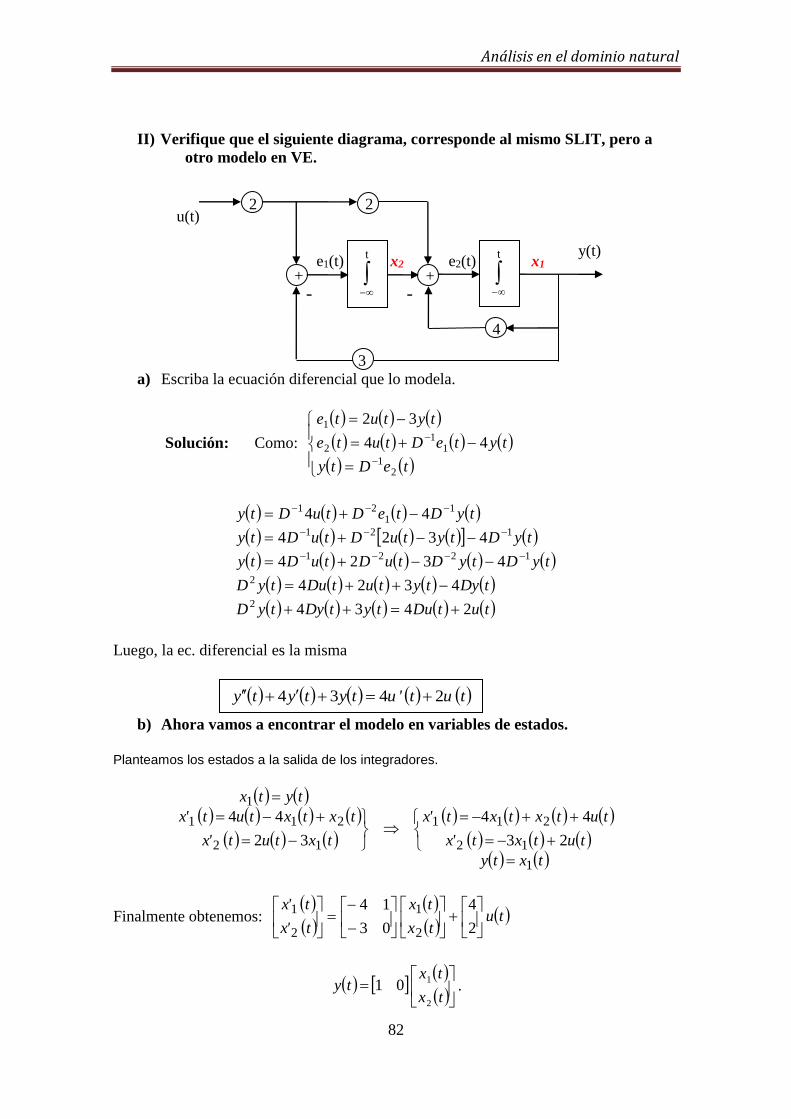
Análisis en el dominio natural
82
II) Verifique que el siguiente diagrama, corresponde al mismo SLIT, pero a
otro modelo en VE.
a) Escriba la ecuación diferencial que lo modela.
Solución: Como:
teDty
tyteDtute
tytute
21
11
2
1
44
32
tutDutytDytyD
tDytytutDutyD
tyDtyDtuDtuDty
tyDtytuDtuDty
tyDteDtuDty
2434
4324
4324
4324
44
2
2
1221
121
11
21
Luego, la ec. diferencial es la misma
b) Ahora vamos a encontrar el modelo en variables de estados.
Planteamos los estados a la salida de los integradores.
txty
tutxt'x
tutxtxt'x
txtut'x
txtxtut'x
tytx
1
12
211
12
211
1
23
44
32
44
Finalmente obtenemos:
tutx
tx
t'x
t'x
2
4
03
14
2
1
2
1
tx
txty
2
1 01 .
u(t)
t
t
e1(t) e2(t) y(t)
2 2
4
+ +
-
3
-
x2 x1
tut'utytyty 2434

Análisis en el dominio natural
83
Se puede comprobar que a partir de estas ecuaciones se llega a la ecuación diferencial
del Sistema.

Análisis en el dominio natural
84
Solución en el dominio temporal de las Ecuaciones de los Estados
Consideremos el modelo general:
x(t) Ax(t) Bu(t)
y(t) Cx(t) Du(t)
Primero se tratará de encontrar la solución natural, libre o no forzada; es decir, u(t)=0 .
Entonces, la primera ecuación se simplifica y queda:
x(t) Ax(t) (10)
Suponga que la solución de esta ecuación matricial es:
x(t)= e A(t-to) x(t0) (11a)
x(t0) es el vector de estados iniciales en t = t0 . Para el caso en que t0=0, entonces,
será:
x(t)= eAt x(0) (11b)
donde : )t(te A ( nxn), llamada matriz de transición de estados, es una matriz
función de la matriz A , que se define como:
k
k !k
ktte AA
0. (12)
donde, veces k
AAAA ........k .
Además, puede observarse que AAAAA ee e ttt
dtd .
Demostración:
1
1 1
1
0
1
00
k
k !k
ktk
k !k
ktkk
k !k
kt
dt
dk
k !k
kt
dt
dtedt
dA AAAAA
tej
j !j
jt
kk
k !k
kt AA AA AA
0 escribirse puede 1,-j para ;1
1 1
1
Entonces, ahora se puede verificar que la (11) es solución de la (10):
. . . . . . . . . . . . . . . . . . .

Análisis en el dominio natural
85
Propiedades: la matriz eAt tiene las siguientes propiedades:
1. Ie 0
2. 2121 tttt
e eeAAA
3. identidad) matriz : (IIe e tt1 AAAA tt ee .
Observar también que es posible encontrar x(t0), para algún t0 <t1, a partir del
conocimiento del valor de los estados para ese instante de tiempo t1 .
Entonces, como x(t1)= eA(t1-t0) x(to),
será: x(to)=( eA(t1-t0))-1 x (t1).
Además, como la matriz inversa de eAt es e-At . Luego,
x(to)= e-A(t1-t0) x (t1),
o, x(to) =(t0-t1) x(t1) (13)
la que expresa una relación entre 2 valores de la solución libre de los estados.
Solución total de los estados
Para encontrar la solución total, debe conocerse una solución forzada de la ecuación
diferencial. Se supone una solución de la forma:
x f (t)= eAt q(t) (14)
donde q(t) es un vector de funciones desconocidas que se van a determinar. Se obtiene
por sustitución de la ecuación de los estados, que:
)Bu()(Ax)(x ttt ff (15)
Ahora, si se sustituye la ec.(14) en la ec. (15) resulta que:
)Bu()q(Ae)(qe)q(Ae AAA tttt ttt
Simplificando y despejando: )Bu(e)(q A tt t
cuya solución se encuentra integrando. Así, se obtiene:
q(t) q(t ) e Bu( )A 0
0
t
t
d
Luego, la solución libre de los estados es x(t)= e A(t-to) x(t0)

Análisis en el dominio natural
86
y la solución forzada: dtttt
t
)t(tt)Bu(e)q(e)q(e)(x
AAA
0
0f
La solución completa de la ecuación es:
dt)t(tt
t
)t(t)tt()Bu(e)q(exe)x(
AAA
0
000
Evaluando la ecuación anterior para t=t0 resulta q(t0)=0, por lo cual la expresión final
para la solución completa queda:
x( ) e x e Bu( )A At t dt t t
t
t
( ) ( )( )0
0
0 (16)
Sustituyendo en la segunda ecuación de (7), se obtiene la salida correspondiente
y t t d u tt t t
t
t
( ) Ce x Ce Bu( ) DA A ( ) ( )( ) ( )0
0
0 (17)
El primer sumando es la respuesta cuando u(t) = 0, es decir la respuesta libre que
depende de las condiciones iniciales.
Los segundo y tercer sumandos constituyen la respuesta cuando x(t0) = 0, es decir la
respuesta forzada. De estos términos podemos asimismo obtener la respuesta al
impulso.
Verifique, de la (17), que la cantidad Ce BAt +D (t) es la función respuesta al impulso
h(t) definida para sistemas lineales de una entrada y una salida.
Ejercicio 5:
Calcular la solución libre y forzada del sistema y los estados para un SLI cuyo modelo está dado por las matrices de abajo. Suponga también conocida la matriz transición de los estados:
32
10A ;
1
0B ; 54C ;D=0;
0,222
222
22
teeee
eeeetttt
tttttA
e
Si el modelo dado es el de la segunda forma canónica, reconstruya la ecuación diferencial, halle las raíces de la ecuación característica y compare los valores encontrados con los autovalores de A.

Análisis en el dominio natural
87
Cálculo de eAt
Para A diagonal, con elementos aii, i=1, 2, . . n, diferentes, puede demostrarse que
siempre será tAe también una matriz nxn diagonal, cuyos elementos son taiie , i=1,2,
. . n.
Para A cualquiera, tAe debe calcularse mediante alguna de las siguientes
expresiones:
Método con series:
0k
kkt
!k
tAA
e (I)
Método de Cayley-Hamilton:
1
0
n
i
ii
t )t( AeA (II).
La reducción de la serie infinita de (I) a una serie de n términos de (II) se debe al
teorema que establece que solamente las primeras n-1 potencias de la matriz de orden n
n son linealmente independientes; es decir, todas las potencias más altas de A pueden
expresarse en términos de I, A, A2, . . . , An-1. La ventaja es entonces que se reduce una
suma de infinitos términos (expresión I), a una suma de n términos (expresión II).
Para obtener tAe utilizaremos el Método de Cayley – Hamilton, que indica que
cualquier matriz arbitraria A de tamaño n x n satisface su ecuación característica, es
decir:
det(A- I) = 0,
donde los escalares i con i = 1, 2.... n que satisfacen la ecuación característica anterior
se denominan autovalores de A.
Se puede demostrar que e At puede escribirse como una combinación lineal de potencias de
A.
1
0
n
i
ii
t t γe AA ,
donde, los tγi se pueden obtener resolviendo el sistema de n ecuaciones
,...,n,j,λ t γtγen
i
iji
tλ j 211
10
cuando todos los autovalores son diferentes. Cuando existen autovalores repetidos debe
utilizarse un recurso que se mostrará en el Ejercicio 7.
Ejercicio 6: Encontrar la matriz transición de los estados para la matriz A dada
300
031
013
300
031
013
IAA
032727933 233 Idet A

Análisis en el dominio natural
88
4,3,2 321 Autovalores de A.
Luego, 2210 AAA tγ tγ Itγe t
tγ0 , tγ1 y tγ2
satisfacen las ecuaciones:
t16t4te
t9t3te
t4t2te
210
t4
210
t3
210
t2
Resolviendo el sistema de ecuaciones obtenemos:
ttt
ttt
ttt
eeetγ
eeetγ
eeetγ
234
21
2
2
2734
25
1
2340
2
6
683
Por lo tanto queda:
900
0106
0610
300
031
013
100
010
001
210 ttte t A
Resolviendo finalmente se obtiene:
t
tttt
tttt
t
e
eeee
eeee
e
3
2
214
212
214
21
2
214
212
214
21
00
0
0
A
Ejercicio 7 (Con raíces dobles):
010
441
011
A 210 321 ,Idet A
2210 AA tγ tγ Itγt
tγtγte
tγtγtγe
tγtγtγe
t
t
t
212
2102
210
4
42
La tercer ecuación se obtuvo derivando 2210 λtγ λtγ tγe λt con respecto a ,
lo que resulta en: ttte t21 2
Ejercicio 8 . Considere nuevamente el sistema del Ejercicio 4. Es posible verificar que
para el modelo en VE hallado, la matriz transición de los estados es la siguiente:

Análisis en el dominio natural
89
)tcosh(e)t(senhe)t(senhe
)t(senhe)tcosh(e)t(senhe)t(
ttt
ttt
333
323
3
3
33
333
3
32
222
222
,t ≥0.
Propiedades de la matriz de transición
Consideremos nuevamente para su análisis, las propiedades ya enunciadas de la matriz
Ate)t( , definida como : et
kt
k
k
kAA
!0 .
Recordemos también la ec. (11.a) que establece la relación
)()()( 000
)( 0 ttttetttA
)x(xx .
Ahora, demostremos las 3 propiedades:
1. I)( 0
Demostración: . . . . . . . . . . . . .
2. )t().t()t().t()tt( 122121
Demostración:
Considere t=t1 y t0=0. Por ec.(11.a) se puede escribir )(t)t( 011 )x(x .
Suponga que quiere escribir la misma ecuación para una condición inicial dada en t0= t1
Entonces, para t2 segundos más tarde (es decir t - t0 = t2 ), la relación sería:
)()t(t)t(t)tt( 0121212 x)()x(x (20)
Pero, también se puede escribir la misma relación para un tiempo final t1+t2 con
condición inicial en 0, directamente:
)()tt)tt( 01212 x(x (21)
Comparando ec(20) y ec(21), resulta que )t().t()tt( 1221
Del mismo modo, si fuese t2<t1 , se llegaría a )t().t()tt( 2121 .
3. )t()t( 1
Demostración: . . . . . . . . . . . . . .
Ejercicio: Verifique las propiedades de la matriz de transición en alguno de los
ejemplos anteriores.
Estabilidad:

Análisis en el dominio natural
90
Un sistema LTI es estable si los autovalores de la matriz de estados tienen
parte real negativa. Para fundamentar esta propiedad, analice la relación de los
autovalores con la ecuación característica del sistema.
TRANSFORMACIÓN DE SEMEJANZA
El modelo de variables de estado de un mismo LTI no es único, sino que por el
contrario, un LTI tiene un número ilimitado de modelos de estado.
Transformaciones
Se considera el caso de sistemas de una entrada-una salida
x(t) Ax(t) B ( )
y(t) Cx(t) ( )
u t
Du t
Considere un nuevo vector de funciones de dimensión n v(t) , que se representa como
una combinación lineal de los elementos del vector de estados x(t) .
)()()()(
)()()()(
)()()()(
2211
22221212
12121111
txqtxqtxqtv
txqtxqtxqtv
txqtxqtxqtv
nnnnnn
nn
nn
En forma matricial esta ecuación puede escribirse como
v(t)=Qx(t)=P-1x(t)
x(t)=P v(t)
donde P es llamada matriz de transformación.
Sustituyendo (30) en (28) da:
)(CPv(t)y(t)
)(BAPv(t)(t)vP
tDu
tu
y rescribiendo:
)(v(t)Cy(t)
)(Bv(t)A(t)v
tuD
tu
vv
vv
donde: Av=P-1AP , Bv=P-1B , Cv=CP , Dv=D
Esta transformación se llama de semejanza pues si bien la estructura interna del
modelo se modifica, la relación entrada-salida no.
Propiedades de las matrices de estados para los modelos resultantes de
aplicar transformaciones de semejanza.

Análisis en el dominio natural
91
1) det (I-Av) = det (I-A)
Lo que implica que los autovalores del sistema y del sistema transformado son los mismos.
Dem: . . . . . . .
2) det Av = det A (= 1 2 . . . n)
3) tr Av = tr A (= 1 +2 +. . . +n)
Ejemplo
Para el mismo sistema lineal de segundo orden considerado en el Ej. 1, suponga la
transformación dada por: v t x t x t
v t x t x t
1 1 2
2 1 22
( ) ( ) ( )
( ) ( ) ( )
Halle:
a) las matrices P y Q
b) las ecuaciones de estado transformadas
c) la función de respuesta al impulso del sistema
d) verifique las propiedades enunciadas
Transformación de los autovalores
Si A tiene n autovalores distintos, entonces puede diagonalizarse usando la
transformación
=P-1AP
siendo P una matriz cuyas columnas son los autovectores de la matriz A, resultando la
matriz como una matriz diagonal cuyos elementos son los autovalores de A.
Prueba: para cada autovalor puede escribirse la ecuación
A.1= 1.1
A.2= 2.2
A.n= n.n
donde por ejemplo, 1 es el autovector correspondiente al autovalor 1 .
Ahora, las n ecuaciones partir de arriba, puede escribirse en forma matricial como:
AP =P.
resultando entonces: =P-1 A P
Luego, si se elije para la Transformación de Semejanza, la matriz formada por los
autovectores, se obtendrá un modelo en variables de estado, con una matriz de estados
Av =, diagonal, cuyos elementos son los autovalores del sistema.

Análisis en el dominio natural
92
Ejercicio 9: Encuentre el modelo de variables de estado semejante al encontrado ya
en el Ejercicio 5, realizando la transformación por los autovectores.

Análisis en el dominio transformado
93
ANÁLISIS EN EL
DOMINIO
TRANSFORMADO
Análisis en el dominio transformado
94
INTRODUCCIÓN
El desarrollo de las técnicas del análisis de Fourier tiene una larga historia; desde
los babilonios y con Euler en la historia moderna.
El concepto del empleo de “sumas trigonométricas”, esto es, sumas de senos y
cosenos o de exponenciales complejas periódicas, armónicamente relacionadas, se
utiliza para describir fenómenos periódicos, y específicamente, veremos que si la
entrada a un sistema SLIT se expresa como una combinación lineal de exponenciales
complejas periódicas o senoidales, la salida también se puede expresar de esta forma,
con los coeficientes expresados en forma conveniente en términos de los de la entrada.
Esto facilita en gran parte el análisis de los sistemas SLIT.
Si deseamos describir una señal, periódica o no, en términos matemáticos, se
tienen varias posibilidades. Una de ellas, muy familiar a los estudiantes de ingeniería y
ciencias experimentales, es el conocido método de ajuste de curvas, un ajuste de curva
puede ser considerado como un modelo para una serie temporal de valores de una
variable (señal). Estos métodos se presentan en varias versiones por ejemplo:
a) Empleo de polinomios,
f(t) = a0 + a1t + a2 t2+...+an t
n,
Aquí se trata de representar una señal de forma que se pueda manejar con formas
potenciales. Una alternativa consiste en suponer que es posible ajustar un polinomio
para que sus valores representen los de la señal. Para esto se debe obtener un sistema de
ecuaciones con las que se determinan los coeficientes del polinomio. Mientras mayor
sea el número de puntos del polinomio que coincidan con los de la curva que se
pretende ajustar, mayor será el grado del polinomio a considerar. Esto sugiere que el
método es bastante potente y que se puede conseguir tanta precisión como se quiera en
el citado ajuste. Sin embargo, que el sistema propuesto presenta ciertas debilidades para
el caso de señales periódicas.
El sentido del método es bastante claro y para ciertas curvas resulta suficiente,
pero la función resultante de este ajuste no es periódica, por lo tanto es aplicable solo a
un ciclo de una señal periódica (o parte de él), por esta razón sólo da valores
suficientemente aproximados para los puntos que se ha tomado para hacer el cálculo (y
su entorno), la precisión de la representación se va perdiendo rápidamente a medida que
nos alejamos de los puntos de referencia.
b) Serie de potencias
f(t)= a0 + a1
t
1 f’ (t) + a2
t 2
2 f’’(t) + ...
Ajusta los puntos y sus derivadas, tiene también el problema de no ser periódica
y por lo tanto con este tipo de representación podemos aspirar, como máximo, a ajustar
la señal en un intervalo de tiempo finito, no obtener una expresión para la función en
todo el dominio del tiempo.
c) La otra posibilidad es representar nuestra señal en otro dominio de validez, que como
veremos, es completamente equivalente a la representación que hemos venido haciendo.
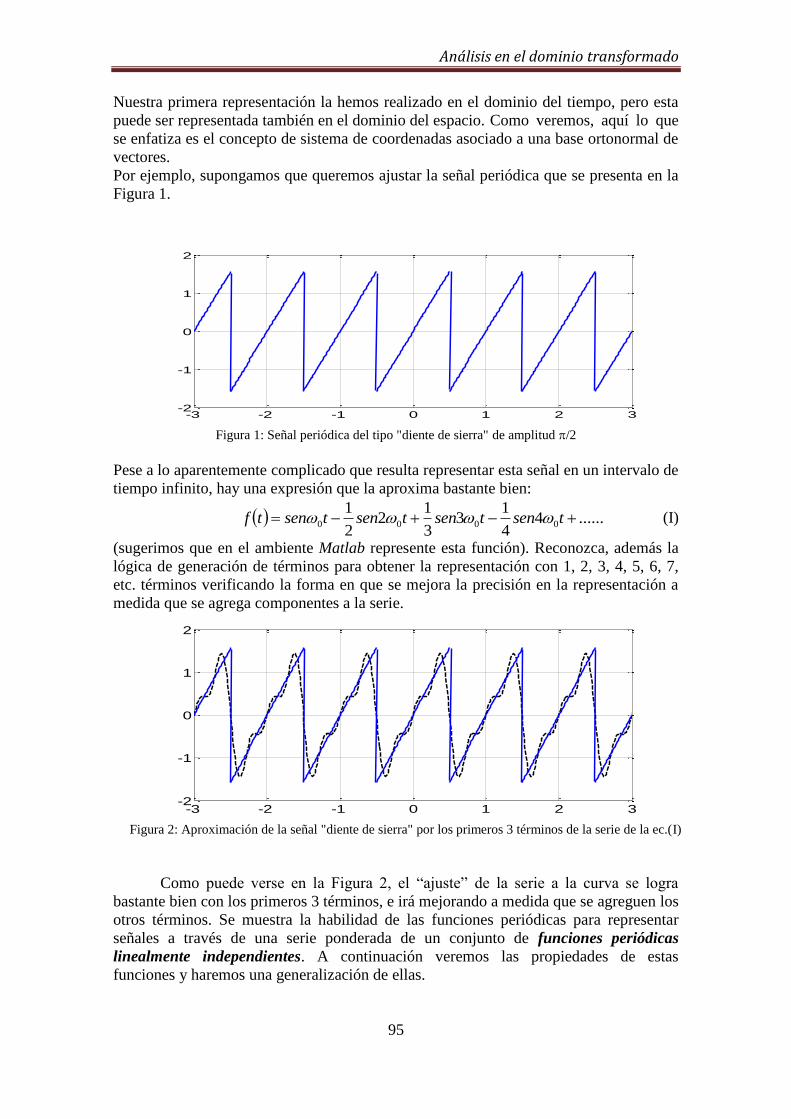
Análisis en el dominio transformado
95
Nuestra primera representación la hemos realizado en el dominio del tiempo, pero esta
puede ser representada también en el dominio del espacio. Como veremos, aquí lo que
se enfatiza es el concepto de sistema de coordenadas asociado a una base ortonormal de
vectores.
Por ejemplo, supongamos que queremos ajustar la señal periódica que se presenta en la
Figura 1.
-3 -2 -1 0 1 2 3-2
-1
0
1
2
Figura 1: Señal periódica del tipo "diente de sierra" de amplitud /2
Pese a lo aparentemente complicado que resulta representar esta señal en un intervalo de
tiempo infinito, hay una expresión que la aproxima bastante bien:
......44
13
3
12
2
10000 tsentsentsentsentf (I)
(sugerimos que en el ambiente Matlab represente esta función). Reconozca, además la
lógica de generación de términos para obtener la representación con 1, 2, 3, 4, 5, 6, 7,
etc. términos verificando la forma en que se mejora la precisión en la representación a
medida que se agrega componentes a la serie.
-3 -2 -1 0 1 2 3-2
-1
0
1
2
Figura 2: Aproximación de la señal "diente de sierra" por los primeros 3 términos de la serie de la ec.(I)
Como puede verse en la Figura 2, el “ajuste” de la serie a la curva se logra
bastante bien con los primeros 3 términos, e irá mejorando a medida que se agreguen los
otros términos. Se muestra la habilidad de las funciones periódicas para representar
señales a través de una serie ponderada de un conjunto de funciones periódicas
linealmente independientes. A continuación veremos las propiedades de estas
funciones y haremos una generalización de ellas.
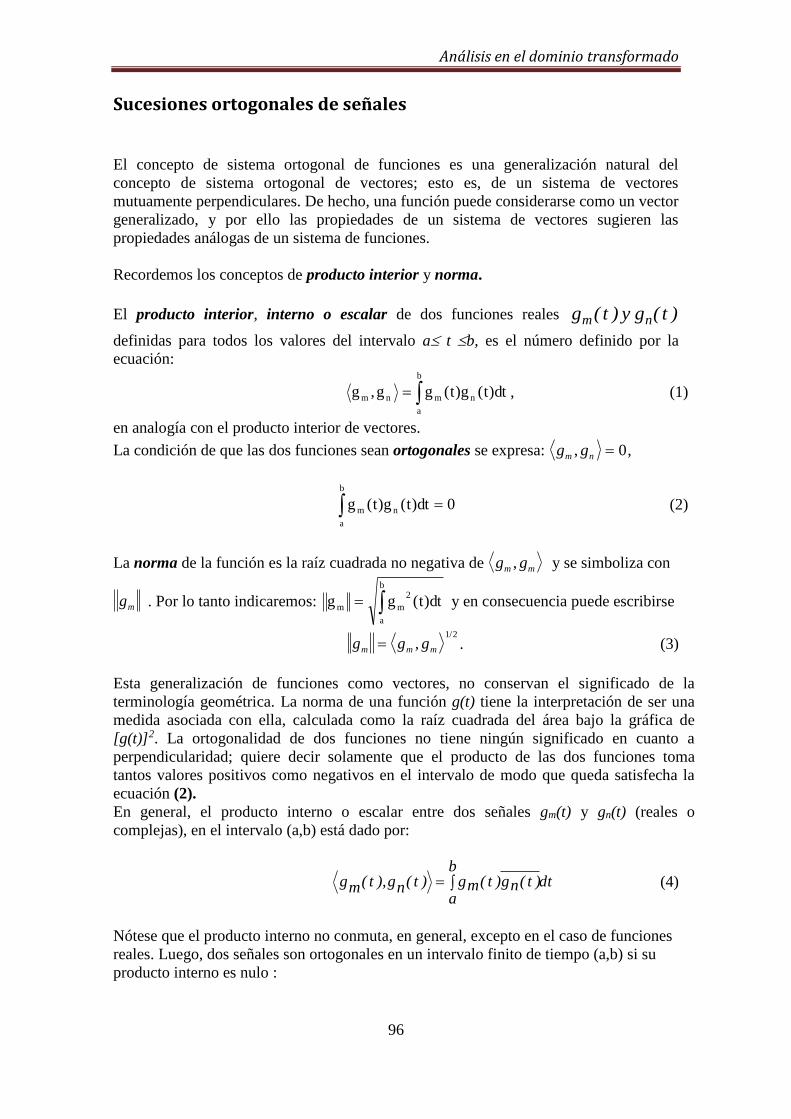
Análisis en el dominio transformado
96
Sucesiones ortogonales de señales
El concepto de sistema ortogonal de funciones es una generalización natural del
concepto de sistema ortogonal de vectores; esto es, de un sistema de vectores
mutuamente perpendiculares. De hecho, una función puede considerarse como un vector
generalizado, y por ello las propiedades de un sistema de vectores sugieren las
propiedades análogas de un sistema de funciones.
Recordemos los conceptos de producto interior y norma.
El producto interior, interno o escalar de dos funciones reales )t(gy)t(g nm
definidas para todos los valores del intervalo a t b, es el número definido por la
ecuación:
b
a
nmnm dt)t(g)t(gg,g , (1)
en analogía con el producto interior de vectores.
La condición de que las dos funciones sean ortogonales se expresa: g gm n, 0,
b
a
nm 0dt)t(g)t(g (2)
La norma de la función es la raíz cuadrada no negativa de g gm m, y se simboliza con
gm . Por lo tanto indicaremos:
b
a
2
mm dt)t(gg y en consecuencia puede escribirse
g g gm m m ,/1 2
. (3)
Esta generalización de funciones como vectores, no conservan el significado de la
terminología geométrica. La norma de una función g(t) tiene la interpretación de ser una
medida asociada con ella, calculada como la raíz cuadrada del área bajo la gráfica de
[g(t)]2. La ortogonalidad de dos funciones no tiene ningún significado en cuanto a
perpendicularidad; quiere decir solamente que el producto de las dos funciones toma
tantos valores positivos como negativos en el intervalo de modo que queda satisfecha la
ecuación (2).
En general, el producto interno o escalar entre dos señales gm(t) y gn(t) (reales o
complejas), en el intervalo (a,b) está dado por:
b
adt)t(ng)t(mg)t(ng),t(mg (4)
Nótese que el producto interno no conmuta, en general, excepto en el caso de funciones
reales. Luego, dos señales son ortogonales en un intervalo finito de tiempo (a,b) si su
producto interno es nulo :

Análisis en el dominio transformado
97
,.....)2,1(m,nnmsi
2ng
nmsi0b
adt)t(ng)t(mg
(5)
Si ninguna de las funciones gr tiene norma cero, cada función gr puede normalizarse
dividiéndolas por la constante positiva rg .
Definición: Sistema o conjunto ortogonal es toda sucesión de funciones
,.....),,(rgr 321 ortogonales dos a dos en un cierto intervalo. El sistema se
llama ortonormal cuando las funciones están normalizadas, es decir, todas
tienen norma 1.
Considere entonces un sistema ortogonal rg . Si se forma una nueva sucesión r ,
donde
r
rr
g
g es normal y ortogonal, entonces, esta sucesión diremos
abreviadamente que es ortonormal, en el intervalo.
Ejemplo:
La sucesión
c
tnsen es ortogonal en el intervalo (0, c) y la norma de estas
funciones es c
2 y por lo tanto, la sucesión ortonormal es:
,......)2,1n,ct0(c
tnsen
c
2
Ejemplos de sistemas ortogonales
1) Sea
2
T,
2
TQ , con B =
Nn,T
tn2sen,
T
tn2cos,1 . Probar que B es un sistema
ortogonal. B se llama sistema trigonométrico.
0n,0T
tn2cos,1
n,0T
tn2sen,1
2
Tdt
T
tn2cos.
T
tn2cos0nmSi.nmpara,0
T
tm2cos,
T
tn2cos
2
T
2
T

Análisis en el dominio transformado
98
2
Tdt
T
tn2sen.
T
tn2sen0nmSi.nmpara,0
T
tm2sen,
T
tn2sen
2
T
2
T
nmpara,0T
tm2sen,
T
tn2cos
. Por lo tanto B es ortogonal n,m
Ahora, se puede calcular B’ ortonormal.
* Si T)t(vTdt.v)t(v
T
T
2
2
211
* Si 2
T2)t(f
2
Tdt
T
tn2cos)t(f
T
tn2cos)t(f,Nn n
2
T
2
T
22
nn
* Si2
T2)t(g
2
Tdt
T
tn2sen)t(g
T
tn2sen)t(g,Nn n
2
T
2
T
22
nn
Luego: B’ =
Nn,T
tn2sen
T2
2,
T
tn2cos
T2
2,
T
1
2) Sea
2
T,
2
TQ , T > 0 con B =
T
2w,Zn,e
T
10
tjnw0
. Probar que B es un
sistema ortogonal y ortonormal.
Consideramos tjmw
mtjnw
n eT
)t(;eT
)t( 0011
, entonces
dteT
dteT
.eT
,
T
T
tw)mn(jtjmw
T
T
tjnwmn
2
2
2
2
000111
2
2
0
0
11T
T
tw)mn(je
)mn(jT
mnsi
mnsi,)mnsinc(
)mn(j
ee )mn(j)mn(j
0
1
2
B ortogonal.
Calculamos la norma:
2
2
2
2
22
1111
0
T
T
T
T
tjnwZndt
Tdte
T , en consecuencia B
es ortonormal.

Análisis en el dominio transformado
99
SERIES DE FOURIER GENERALIZADAS
Los conjuntos ortogonales proporcionan tipos importantes de desarrollos en serie, en
una forma relativamente sencilla. En efecto, sea B={1(t), 2(t),........ n(t),........},
cualquier conjunto ortogonal de funciones sobre un intervalo atb. Puede que resulte
posible representar una función ƒ dada arbitrariamente en aquel intervalo por medio de
una combinación lineal de aquellas funciones generalizada a una serie infinita:
ƒ(t) = k11(t) + k22(t) +..................+ kn n(t)+……….. (6)
En el caso de que la serie converja hacia ƒ(t), y si, después de multiplicar todos los
términos de la expresión anterior por m (t) ( m fijo), la serie que resulta en el segundo
miembro es integrable, y suponiendo que es permisible la integración término a término,
podremos obtener los coeficientes cn , que son los coeficientes de Fourier.
11
,.,n
mnn
b
a nmnn
b
a
mm kdtkdtff
dtkdtkdtkf
b
a
mnn
b
a
m
b
a
mm ......, 2211
Observe el lado derecho de la igualdad de arriba. La integral para la que n= m es igual a 2
mmm , , mientras que todas las demás integrales son cero, debido a la
ortogonalidad del conjunto de funciones. Luego, resulta entonces que: 2
, mmm kf ,
y la fórmula para los coeficientes de Fourier queda:
b
a
m
mm
mm dtttf
fk )()(
1,22
, (7)
siendo éstos los coeficientes de Fourier de ƒ respecto de la sucesión ortogonal {n}.
Resulta claro que si el sistema es ortonormal, {n}, los coeficientes de Fourier se
reducen a:
b
a
mmm dtttffk )()(, (8)
La serie de la ecuación (6) con estos coeficientes es la serie de Fourier generalizada
correspondiente a la función ƒ.
Análisis en el dominio transformado
100
ERROR CUADRÁTICO MEDIO y la IDENTIDAD DE PARSEVAL
Si f(t) se aproxima por su suma parcial de Fourier, definida como :
m
nnnm tktS
1
)()( (9)
Entonces, se comete un error dado por la diferencia entre la f(t) y su aproximación, es
decir: Em = f(t) - Sm(t). Se denomina error cuadrático medio m a:
abm
1
b
a
m
b
a
m dt)t(S)t(fab
dtE22 1
. (10)
Puede probarse que { m}mN es una sucesión real no negativa decreciente y como la
sucesión de sumas parciales de Fourier Sm(t) converge a f(t) en la media cuadrática, es
decir, lim f t S t dtm
m
a
b
( ) ( )
2
0 , entonces limm
m
0.
Por lo tanto, si se aproxima una función f(t) por una serie finita de Fourier Sm(t),
dicha aproximación tiene la propiedad de tener el mínimo error cuadrático medio.
Si la condición:
b
a
0dt2
(t)mSf(t)m
lim (11)
es satisfecha por cualquier función f en nuestro espacio funcional, diremos que el
sistema ortonormal {n(t)} es cerrado en el sentido de la convergencia en media.
Desarrollando el integrando de la ecuación (11), y teniendo presente la definición de kn,
se llega a que:
0)(lim1
222
b
a
m
nnn
mkdttf , de donde se deduce que se verifica la expresión
conocida como identidad de Parseval:
b
a
nn
n dttfk22
1
2)(
(12)
Demostración: . . . . . . .
Análisis en el dominio transformado
101
Puede demostrarse que si el sistema utilizado fuese ortonormal, y no solamente
ortogonal, la expresión anterior se modifica como:
b
ann dttfk
2
1
2)(
De todo lo anterior surge que el error cuadrático de la aproximación (ec. (10)),
respecto de f en el intervalo fundamental será, para cualquier sistema ortogonal,
cuando se utilizan las primeras m componentes:
b
a
m
nnnm kdttf
ab 1
222)(
1 .
Aproximación cuadrática
Las series de Fourier, como se dijo, desempeñan un papel principal en la aproximación
de funciones por medio de funciones más simples. Esta área es conocida como teoría de
aproximaciones. A continuación analizaremos la demostración de la propiedad de que
los coeficientes de la serie de Fourier dados por la ec.(8) son aquellos que proporcionan
la aproximación con menos error cuadrático medio.
Sea f(t) una función que puede representarse por una serie de Fourier en el espacio de
funciones seccionalmente continuas en (a,b) y sean m21 ,......., , m funciones de una
sucesión ortonormal {n } (n =1,2,................) en dicho intervalo y Km una combinación
lineal de las mismas.
Km(t) = 11(t)+ 22 (t)+.........+ mm(t) (13)
Es natural preguntarse si (8) es la “mejor” aproximación a f . Consideremos que
“mejor” significa que el “error” de la aproximación es mínimo.
Desde luego, debe definirse primero qué se entiende por el error E de esta
aproximación. Elegimos una definición que mida la bondad de la concordancia entre f
y K en el intervalo, considerando el caso particular en que {n } y f(t) son funciones
reales solo a los efectos de simplificar la demostración.
Se elige: dtK)t(fE
2b
a
m , (14)
que puede considerarse una medida de error, y se desea que sea lo más pequeña posible.
Esta es una aproximación a f(t) por mínimos cuadrados. Obsérvese que E es el
cuadrado de la distancia generalizada f Km entre las funciones f y Km.
Análisis en el dominio transformado
102
Sean cn = < f, n> los coeficientes de Fourier de f, con )t(n ortonormal, entonces:
dt)t(.........)t()t()t(fE
b
a
mm
2
2211
b
a
mmm .c........cc......dt)]t(f[ 222 221122
22
12 (13)
Sumando y restando c12, c2
2,......, cm2 para completar los cuadrados del segundo
miembro, se tiene:
b
a
mmm )c(.....)c()c(c.........ccdt)]t(f[E 2222
211
222
21
2 . (14)
Según se observa de la ecuación (9), E 0; por consiguiente se deduce de la ecuación
(11) que E tiene su valor mínimo cuando 1 = c1 , 2 = c2 , ........,m = cm. Es decir:
2m
22
21
b
a
2 c-................-cc-dtf(t)E (15)
Este resultado puede enunciarse así:
Los coeficientes de Fourier de una función f con respecto a las funciones
1,2,.....,m de un sistema ortonormal son aquellos para los cuales una
combinación lineal de las m funciones resulta ser la aproximación cuadrática
óptima a f(t) en el intervalo.
El error cuadrático total de la aproximación, respecto de f en el intervalo
fundamental es mínimo si y sólo si los coeficientes de dicha aproximación, son los
coeficientes de Fourier de f. Este valor mínimo está dado por la relación (12).

Análisis en el dominio transformado
103
SERIES DE FOURIER
Una forma de onda compleja, periódica, puede ser analizada y representada en términos
de un número de funciones, ortogonales, relacionadas armónicamente.
Nos ocuparemos en profundidad de 2 representaciones diferentes, pero equivalentes
para una misma señal, dadas por:
n
tjnwnec)t(f 0
tnsenbtncosaa
)t(f n
n
n 00
1
0
2
donde T
20
, es la componente de la onda de frecuencia más baja y se la suele llamar
“frecuencia fundamental”.
Observación:
Toda función f: RR, tal que )t(.Af(t) sen se llama armónica.
También )t(.Af(t) cos es armónica y es /2 periódica.
Amplitud de la armónica: A
Fase de la armónica: t +
Fase inicial:
Frecuencia de la armónica:
A la expresión: tn.btn.a 0n0n sencos se la llama n-ésima armónica.
Del mismo modo diremos que la n-ésima armónica está representada por: t-jn
ntjn
n00 .-c.c
ee .
Se llama primera armónica o armónica fundamental a:
t.bt.a 0101 sencos , ó a t-j
-1tj
100 c.c
ee .
Una clase de señales que se puede representar mediante las series de Fourier es la de
señales periódicas que tienen energía finita sobre un período, es decir, señales para las
cuales T
2dtf(t) ; esta condición garantiza que los coeficientes cn sean finitos.
Debido a que la mayoría de las señales periódicas que consideramos tienen energía finita
sobre un solo período, consecuentemente tienen representaciones en series de Fourier.
Las condiciones de DIRICHLET deben ser cumplidas por las funciones, para poder ser
representadas por esta serie. Estas condiciones son satisfechas por prácticamente
todas las señales con las cuales trataremos, y nos garantiza que f(t) será igual a su
representación en serie de Fourier excepto en valores aislados de t para los cuales
f(t) es discontinua.
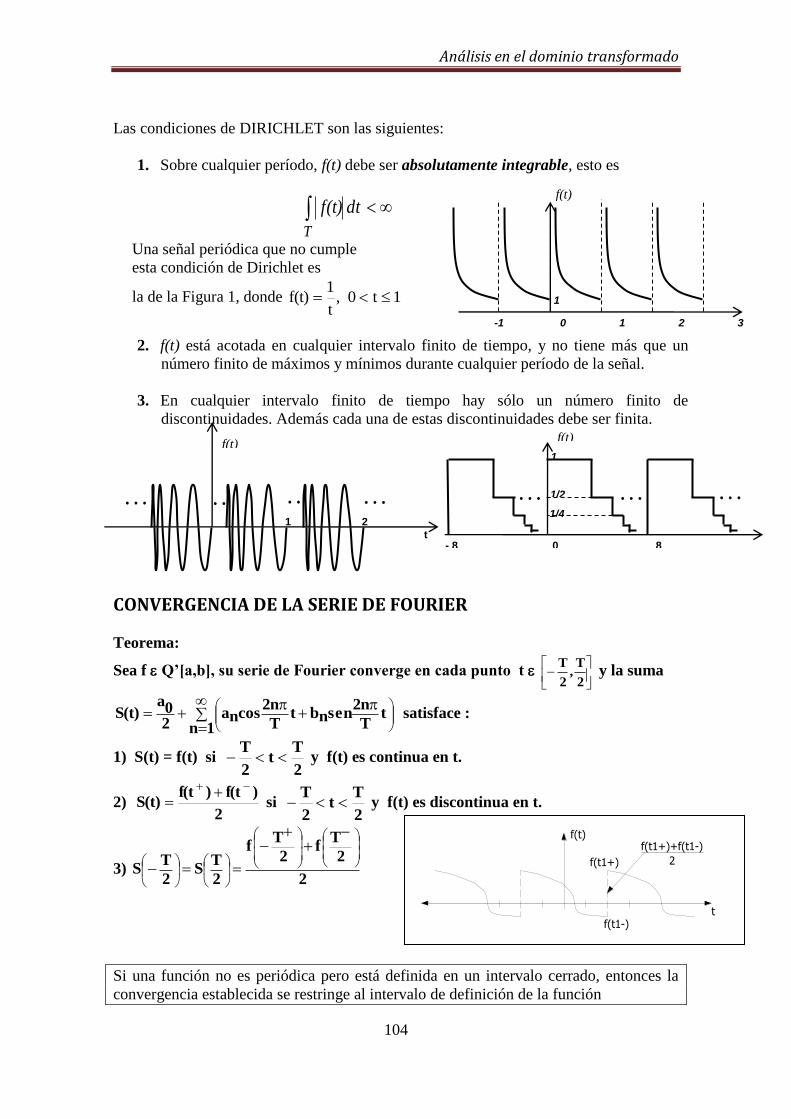
Análisis en el dominio transformado
104
Las condiciones de DIRICHLET son las siguientes:
1. Sobre cualquier período, f(t) debe ser absolutamente integrable, esto es
T
dtf(t)
Una señal periódica que no cumple
esta condición de Dirichlet es
la de la Figura 1, donde 1t0,t
1f(t)
2. f(t) está acotada en cualquier intervalo finito de tiempo, y no tiene más que un
número finito de máximos y mínimos durante cualquier período de la señal.
3. En cualquier intervalo finito de tiempo hay sólo un número finito de
discontinuidades. Además cada una de estas discontinuidades debe ser finita.
CONVERGENCIA DE LA SERIE DE FOURIER
Teorema:
Sea f Q’[a,b], su serie de Fourier converge en cada punto t
2
T,
2
T y la suma
1nt
T
n2sennbt
T
n2cosna
20a
S(t) satisface :
1) S(t) = f(t) si 2
Tt
2
T y f(t) es continua en t.
2) 2
)f(t)f(tS(t)
si
2
Tt
2
T y f(t) es discontinua en t.
3) 2
2
Tf
2
Tf
2
TS
2
TS
Si una función no es periódica pero está definida en un intervalo cerrado, entonces la
convergencia establecida se restringe al intervalo de definición de la función
-1 0 1 2 3 t
1
f(t)
- 8 0 8 t
1
f(t)
1/2
1/4
. . . . . . . . .
f(t)
1 2
t
. . . . . .
. . . . . .
f(t1+)
f(t1-)
f(t)
t
f(t1+)+f(t1-)
2

Análisis en el dominio transformado
105
Serie trigonométrica de Fourier
Sea
2
T,
2
TQ , T>0, con B =
Nn,T
tn2sen,
T
tn2cos,1 ortogonal. La suma
parcial de Fourier está dada por:
m
1n
nn0
mT
tn2senb
T
tn2cosa
2
a)t(S y los
coeficientes se deducen como sigue:
T
dt)t(f
1
1,f
2
a
2
T
2
T
2
0
2
T
2
T
0 f(t)dtT
1
2
a
2
T
dtT
tn2cos).t(f
T
tn2cos
T
tn2cos,f
a
2
T
2
T
2n NndtT
t2nf(t).cos
T
2a
2
T
2
T
n
2
T
dtT
tn2sen).t(f
T
tn2sen
T
tn2sen,f
b
2
T
2
T
2nNndt
T
t2nf(t).sen
T
2b
2
T
2
T
n
Como )t(Slim)t(f mm
resulta:
1n
nn
0
T
t2nsenb
T
t2ncosa
2
af(t) (I)
El error cuadrático medio está dado por
m
1n
2n
2n
20
T/2
T/2
2m ba
2
1
4
adtf(t)
T
1ε
Como el limm
m
0
1n
2n
2n
20
T/2
T/2
2ba
2
1
4
adtf(t)
T
1 Identidad de Parseval
El término a0/2 es el valor medio de la función en el intervalo. Cada uno de los
términos de la serie (I) es periódico en t con período T. Cuando la serie converge a f(t)
en el intervalo fundamental
2
T,
2
T converge a una función periódica de período T

Análisis en el dominio transformado
106
que coincide con f en el intervalo fundamental, es decir, la serie representa la extensión
periódica de f para todos los valores de t. En el caso de que f(t+T) = f(t), la serie
representa a f para cualquier valor de t cuando la representación es válida en el intervalo
fundamental. Sintetizando, la serie de Fourier (I) : a) representa una función definida
en el intervalo
2
T,
2
T para valores de t en ese intervalo, o b) representa una función
periódica, con período T, para todos los valores de t. Evidentemente no puede
representar una función para todo valor de t si la función no es periódica.
Ejercicio: Hallar la serie de Fourier correspondiente a la función
t0sit
0tsi0)t(f
en el intervalo ,
Serie compleja de Fourier
Sea
2
T,
2
TQ , T>0, con B = Zne
tjnw0 ortogonal. La suma parcial de Fourier está
dada por:
m
mn
tjnw
nm0ec)t(S y los coeficientes se deducen a partir de la definición:
T
dte).t(f
e
e,fc
tjnw
2tjnw
tjnw
n
0
0
0
Zn,dtf(t).eT
1c
2
T
2
T
tjnw
n0
Si n = 0
2
T
2
T
0 f(t)dtT
1c
Como )t(Slim)t(f mm
resulta : T
2πwcon.ecf(t) 0
n
tjnw
n0
El error cuadrático medio está dado por
2m
mnn
T/2
T/2
2m cdtf(t)
T
1ε
Como el limm
m
0
n
2
n
2
T
2
T
2cdtf(t)
T
1 Identidad de Parseval
Ejercicio:
Sea la señal periódica f(t) representada por la figura:

Análisis en el dominio transformado
107
f(t)
t
A
-5d -2d -3d -d -d d d 3d 2d 5d
2 2 2 2 2 2
T
Calculamos la serie exponencial de Fourier:
ZndtetfT
c
T
T
tjnw
n
,).(
12/
2/
0
En los intervalos: dt2/deny2/dtd la función f(t) = 0, por lo tanto
resulta:
2/d
2/d
tjnw
n dte.Ad2
1c 0 y resolviendo la integral, se llega a:
Zn,d
nwA
cn
2sinc
20 Por lo tanto la serie es:
tjnw
0
n
n
0e.2
dnwsinc.
2
A)t(f
que converge en
2
T,
2
T. En los puntos donde f(t) es discontinua, la serie converge al
promedio de los límites laterales, es decir:
2
dtsi
2
Ae.
2
dnwsinc.
2
A tjnw
0
n
n
0
2
dtsi
2
Ae.
2
dnwsinc.
2
A tjnw
0
n
n
0
En este caso la identidad de Parseval viene dada por la fórmula:
n
2
n
2/T
2/T
2cdt)t(f
T
1
La integral se calcula fácilmente:
2/d
2/d
22
2
AdtA
d2
1 y los coeficientes de Fourier cn ya
fueron calculados, por lo tanto después de hacer el módulo al cuadrado, resulta la
identidad:
n
0
222
2
dnwsinc
4
A
2
A 2
2
dnwsinc
n
0
2
Si tomamos un caso particular, por ejemplo, T = 2d d2
T , como se muestra en la
figura. Tenemos entonces que: dT
w
2
, 0. Los coeficientes y la correspondiente
serie para la señal f(t)toman las
siguientes formas:
f(t)
t
A
-5d -2d -3d -d -d d d 3d 2d 5d
2 2 2 2 2 2
T

Análisis en el dominio transformado
108
ZnnA
cn
,
2sinc
2
dtjnn
n
encA
tf 7.2
sin.2
)(
, .
También se puede hallar la serie trigonométrica de Fourier.
Considerando la expresión de los coeficientes tendremos que:
0b,Nn,2
nsen
n
A2a,Aa nn0
.
Finalmente se puede escribir la serie trigonométrica correspondiente:
2
T,
2
Tt,
d
tncos.
2
nsen
n
A2
2
A)t(f
1n
Relación entre los coeficientes de la serie exponencial y la serie trigonométrica
Sea
2,
2)(
TTtparadefinidatf real y el desarrollo en serie exponencial
(compleja) de Fourier T
TTtectf
n
tjnwn
2,
2,
2,.)( 0
0
, donde
2/
2/
0).(1 T
T
tjnn dtetf
Tc
. Entonces:
Si n = 0 2
adt)t(f
T
1c 0
2/T
2/T
0
2
ac 0
0
Si n N dt.tnwsenjtnwcos).t(fT
1c
2/T
2/T
00n
cn =
nn b
2
1
2/T
2/T
0
a2
1
2/T
2/T
0 dt.tnwsen).t(fT
1.jdt.tnwcos).t(f
T
1
, de donde: Nnjba2
1c nnn (A)
Ahora calculamos los c-n , con n N
2/T
2/T
tjnw
2/T
2/T
tw)n(j
n dte).t(fT
1dte).t(f
T
1c 00 . Haciendo un análisis similar al caso
anterior resulta: Nnjba2
1c nnn (B)
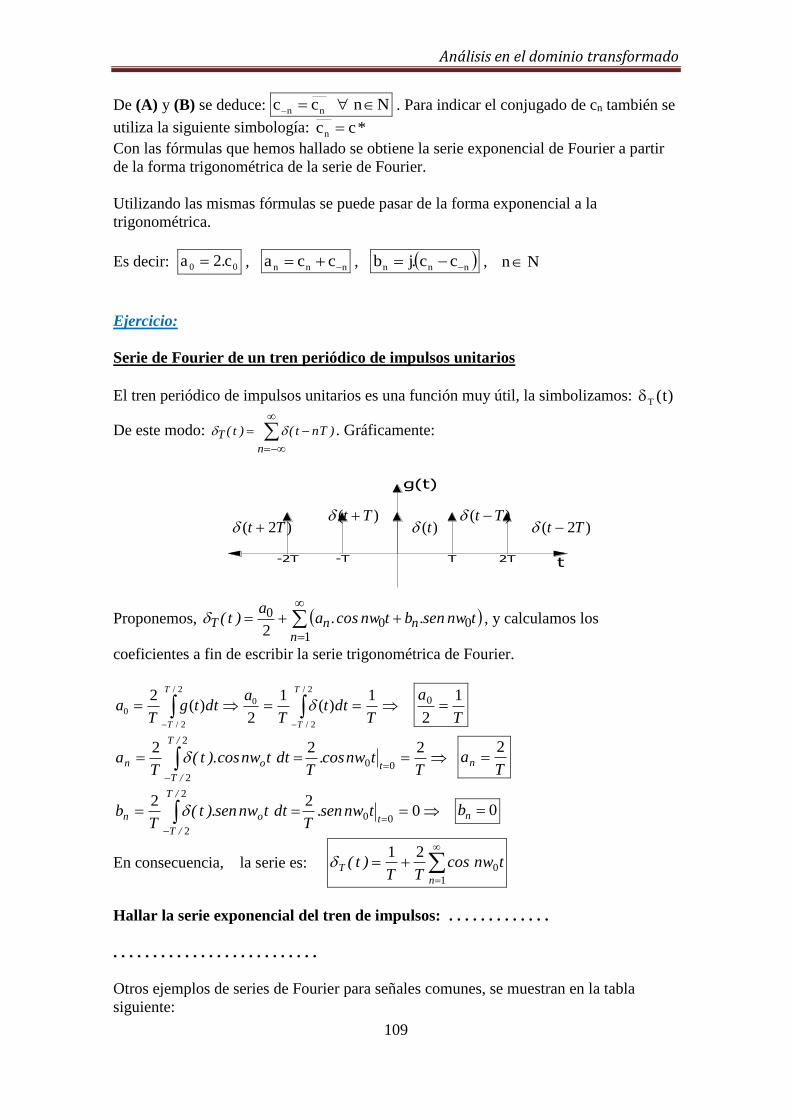
Análisis en el dominio transformado
109
De (A) y (B) se deduce: Nncc nn . Para indicar el conjugado de cn también se
utiliza la siguiente simbología: *ccn
Con las fórmulas que hemos hallado se obtiene la serie exponencial de Fourier a partir
de la forma trigonométrica de la serie de Fourier.
Utilizando las mismas fórmulas se puede pasar de la forma exponencial a la
trigonométrica.
Es decir: 00 c.2a , nnn cca , nnn cc.jb , Nn
Ejercicio:
Serie de Fourier de un tren periódico de impulsos unitarios
El tren periódico de impulsos unitarios es una función muy útil, la simbolizamos: )t(T
De este modo:
n
T )nTt()t( . Gráficamente:
t
g(t)
T 2T-T-2T
Proponemos,
1
000
2 nnnT tnwsen.btnwcos.a
a)t( , y calculamos los
coeficientes a fin de escribir la serie trigonométrica de Fourier.
Tdtt
T
adttg
Ta
T
T
T
T
1)(
1
2)(
22/
2/
0
2/
2/
0 T
a 1
2
0
Ttnwcos.
Tdttnwcos).t(
Ta
t
/T
/T
on
22200
2
2
T
an
2
022
00
2
2
t
/T
/T
on tnwsen.T
dttnwsen).t(T
b 0nb
En consecuencia, la serie es:
1
0
21
n
T tnwcosTT
)t(
Hallar la serie exponencial del tren de impulsos: . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . .
Otros ejemplos de series de Fourier para señales comunes, se muestran en la tabla
siguiente:
)(t )( Tt
)2( Tt )( Tt
)2( Tt
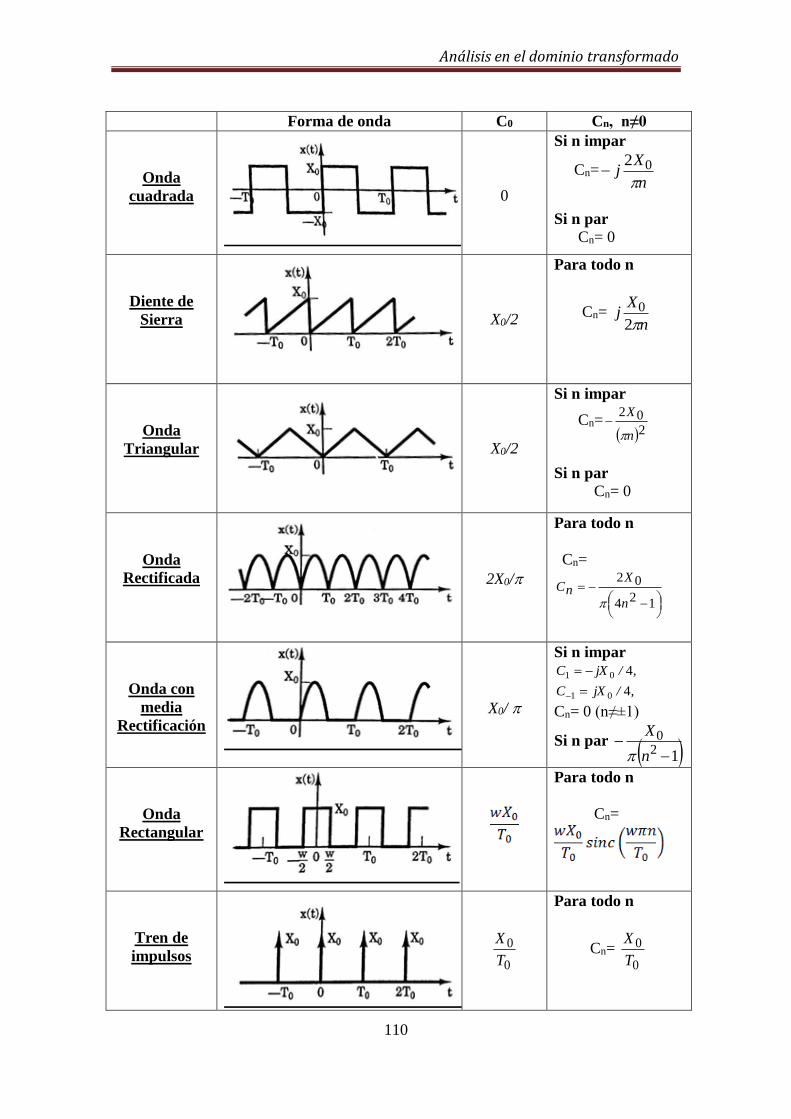
Análisis en el dominio transformado
110
Forma de onda C0 Cn, n≠0
Onda
cuadrada
0
Si n impar
Cn=n
Xj
02
Si n par
Cn= 0
Diente de
Sierra
X0/2
Para todo n
Cn= n
Xj20
Onda
Triangular
X0/2
Si n impar
Cn= 2
02
n
X
Si n par
Cn= 0
Onda
Rectificada
2X0/
Para todo n
Cn=
124
02
n
XnC
Onda con
media
Rectificación
X0/
Si n impar
,/jXC
,/jXC
4
4
01
01
Cn= 0 (n≠±1)
Si n par 12
0
n
X
Onda
Rectangular
Para todo n
Cn=
Tren de
impulsos
0
0
T
X
Para todo n
Cn= 0
0
T
X

Análisis en el dominio transformado
111
RESPUESTA PERMANENTE DE UN SISTEMA LINEAL
A UNA FUNCIÓN PERIÓDICA
La respuesta de un sistema lineal con función H(j) a una función T-periódica, es
una función T-periódica.
Sea un SLIT cuya respuesta al impulso es h(t). Según vimos en el capítulo
anterior la respuesta a una entrada x(t) es : dτ)x(t . hy(t)
. Si la entrada es
una exponencial compleja de la forma tje , definida para todo t, la respuesta
estacionaria o “permanente” del sistema es:
jH.ede).(h.ede.)(h)t(y tjj.tjtj ,
donde )( jH es la función del sistema y es un número complejo para cada valor
determinado de .
Para hallar la respuesta y(t) de un SLIT a una entrada periódica que puede
representarse por una serie de Fourier,
n
tjnnn e.c)t(f 0
, utilizamos la propiedad
de superposición de un SLIT . Como para cada entrada de frecuencia n0 la salida es
H(j n0) e j n0 , entonces, la salida para f(t) será:
n
tjnn e).jn(Hc)t(y 0
0
La última ecuación nos dice que la señal de salida es una suma de exponenciales
con coeficientes )( 0jnHcd nn . Nótese que como )( 0jnH es una constante
compleja para cada valor de n, la salida es también periódica y sus coeficientes de
Fourier son dn. Por otro lado, como la frecuencia fundamental de y(t) es 0 , que es
también la frecuencia fundamental de f(t), los períodos de las dos señales son iguales.
Por lo tanto,
la respuesta SLIT a una entrada periódica de período T
es periódica con el mismo período.
Análisis en el dominio transformado
112
SIMETRÍA DE ONDAS PERIÓDICAS
Funciones pares e impares
Recordemos que:
- f(t) definida en
2
T,
2
T es par f(t) = f(-t)
- f(t) definida en
2
T,
2
T es impar f(t) = - f(-t)
Y que toda función f(t) arbitraria definida en
2
T,
2
T puede escribirse como la suma
de una función par (fp) y una impar(fi).
Demostración:
)t(f)t(f2
)t(f)t(f
2
)t(f)t(f
2
)t(f)t(f)t(f)t(f
2
)t(f)t(f
2
)t(f.2)t(f ip
)t(f)t(f ip
Ejercicio: Demostrar que t R : ip ff
t )tsenh()tcosh(e .
Observar que, para f(t) y g(t) funciones definidas en
2
T,
2
Tse cumple que:
1. Si f(t) y g(t) son pares, entonces su producto es par.
2. Si f(t) y g(t) son impares, entonces su producto es par.
3. Si f(t) es par y g(t) es impar, entonces su producto es impar.
4.
Influencia de la simetría en la serie exponencial de Fourier
Si f(t) es real y par, entonces los cn R, n Z con T
2πω 0
2/T
2/T
0
2/T
2/T
0n dt.tnwsen).t(fT
1jdt.tnwcos.)t(f
T
1c
2/T
2/T
0n dttnwcos).t(fT
1c
Como se observa los cn son reales n Z.
Si f(t) es real e impar, entonces los cn son imaginarios puros, n Z con
T
2π0ω
2/T
2/T
0
2/T
2/T
0n dt.tnwsen).t(fT
1jdt.tnwcos.)t(f
T
1c
2/T
2/T
0n dttnwsen).t(fT
1jc
Como se observa los cn son imaginarios puros n Z.

Análisis en el dominio transformado
113
Influencia de la simetría en la serie trigonométrica de Fourier
Si f(t) es real y par, su serie de Fourier es de la forma:
1n T
t2nπ.cosna
20a
f(t) n N
Pues:
2/T
2/T
0 dt)t(fT
2a
T/2
0f(t)dt
T
40a
2/T
2/T
n dtT
tn2cos).t(f
T
2a
T/2
0dt
T
t2nπf(t).cos
T
4na y bn = 0 n N
Si f(t) es real e impar, su serie de Fourier es de la forma:
1n T
t2nπ.sennbf(t) n N
Pues: 0aa n0 y T/2
0dt
T
t2nπf(t).sen
T
4nb
Además, como para toda f(t) , f(t) = fp(t)+fi(t) será:
1n
0n0
p tnwcos.a2
a)t(f y
1n
0ni tnwsen.b)t(f
Aplicaciones
1) Desarrollos en serie de Fourier para señales definidas en
2
T0, , T > 0
Una señal cualquiera, definida en un intervalo, puede expresarse en ese intervalo
mediante diferentes series, según se proponga lo que llamaremos una extensión
par de la misma o una extensión impar.
Extensión par e impar
f(t)
2
T,0 y se puede extender de forma par o impar a
0,
2
T
La extensión par a
2
T,
2
T será:
02
20
,T
tsi)t(f
T,tsi)t(f
)t(f
Como )t(f es par, su desarrollo en serie de Fourier tendrá las características
correspondientes a toda señal par:
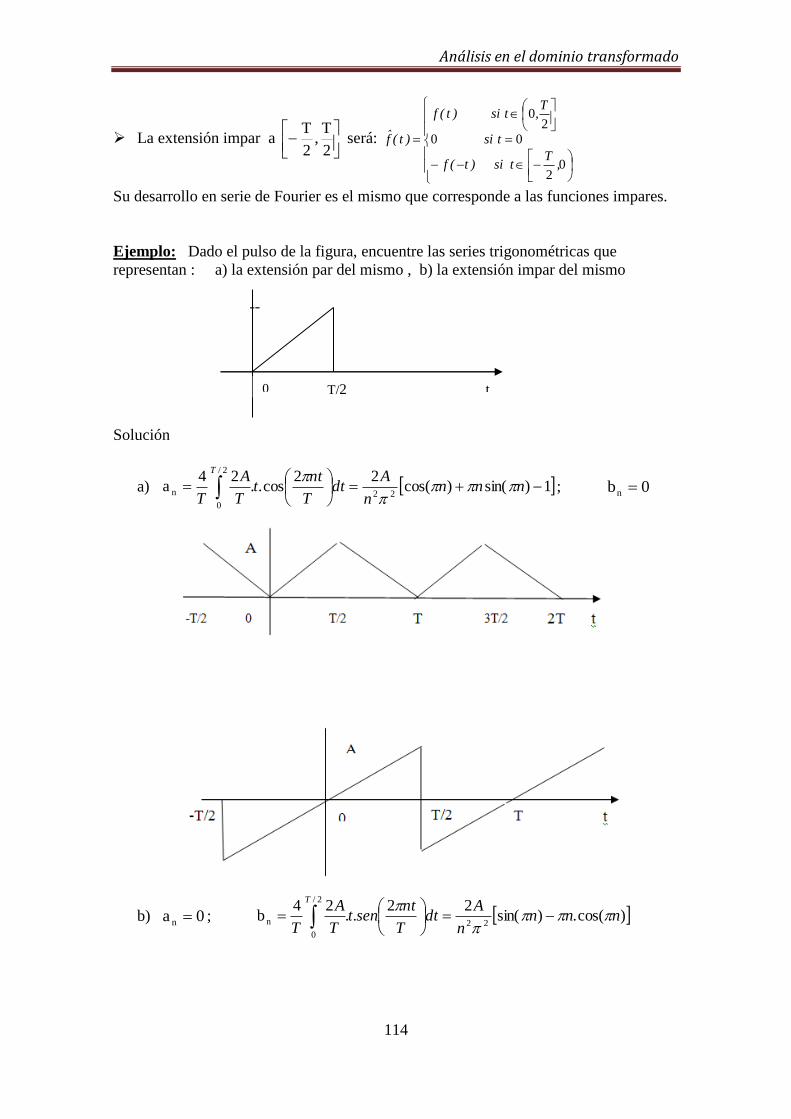
Análisis en el dominio transformado
114
La extensión impar a
2
T,
2
T será:
02
002
0
,T
tsi)t(f
tsi
T,tsi)t(f
)t(f
Su desarrollo en serie de Fourier es el mismo que corresponde a las funciones impares.
Ejemplo: Dado el pulso de la figura, encuentre las series trigonométricas que
representan : a) la extensión par del mismo , b) la extensión impar del mismo
Solución
a) 1)sin()cos(22
cos..24
a22
2/
0
n
nnn
n
Adt
T
ntt
T
A
T
T
; 0bn
b) 0a n ; )cos(.)sin(22
..24
b22
2/
0
n nnnn
Adt
T
ntsent
T
A
T
T
0 T/2 t
--
_A

Análisis en el dominio transformado
115
2) Relación entre los coeficientes de una señal desplazada
Sea f(t) = g(t-a) . Se supone que se sabe que :
n
tjnwn e'c)t(g 0 ,
Entonces será:
n
tjnwajnwn
n
)at(jnwn ee'ce'c)at(g)t(f 000
Y la serie de Fourier
de f(t) resulta
n
tjnwnec)t(f 0
con ajnw
nn e'cc 0 .
Ejemplo: Halle los
coeficientes de la serie
de Fourier de un tren
de pulsos rectangulares desplazado, f(t-d/2).
Simetría de media onda
Sea f(t) definida en
2
T,
2
T, se dice que tiene simetría de media onda si:
2
Ttff(t)
Gráficamente, se debe notar que la porción negativa de la onda es el reflejo de la
porción positiva, desplazada horizontalmente medio período.
Ejercicio:
Si una función periódica f(t) tiene simetría de media onda, demostrar que:
2
Ttf)t(f . Al ser f(t) periódica, de período T, se puede escribir:

Análisis en el dominio transformado
116
)t(f2
TtfT
2
Ttf
2
Ttf
según la definición de simetría de media
onda. En consecuencia:
2
Ttf)t(f
Propiedad: La serie de Fourier de una función periódica f (t) con simetría de
media onda, contiene solamente armónicas impares.
Las fórmulas se pueden deducir, aplicando la definición de simetría de media onda en el
desarrollo de la serie trigonométrica de Fourier.
2n 1 0 2n 1 0
n 1
a cos(2n 1)w t b sen(2n 1)w tf(t)
con a2n = 0 ,
b2n=0
T
2
2n 1 0
0
4a f(t)cos(2n 1)w t dt
T
T
2
2n 1 0
0
4b f(t) sen(2n 1)w t dt
T n N
ESPECTRO DISCRETO DE FRECUENCIA
Si f(t) es una función periódica, de período T, la serie trigonométrica de Fourier
1
000
2n
nn tnwsen.btnwcos.aa
)t(f , muestra a f(t) como una suma de armónicas de
frecuencia n0, donde la componente de cada armónica es: twbtnwa nn 00 nse.cos. ,
siendo T
π20
la frecuencia fundamental y n un múltiplo entero de la
frecuencia de la armónica fundamental.
Los coeficientes complejos de Fourier dados por dte).t(fT
c
/T
/T
tjnwn
2
2
01
, los
representaremos ahora por Fn, pero como estos coeficientes dependen de n y , lo
indicamos como:
Zn,dte).t(fT
)nw(F
/T
/T
tjnw
2
2
00
1
La frecuencia = n0, con n Z, se llama frecuencia discreta.
Si bien puede tomar valores negativos: - 0, -2 0,......., estos valores de frecuencia
no existen desde el punto de vista físico y surgen al efectuar un modelo matemático
complejo de la descomposición espectral de una señal periódica f(t).
El espectro discreto de frecuencias de una función periódica f(t) es el conjunto de
valores: Zn,0 )F(nω , que es un conjunto discreto.
De todo lo desarrollado, se puede concluir que se considera que existen dos formas de
representar una señal:
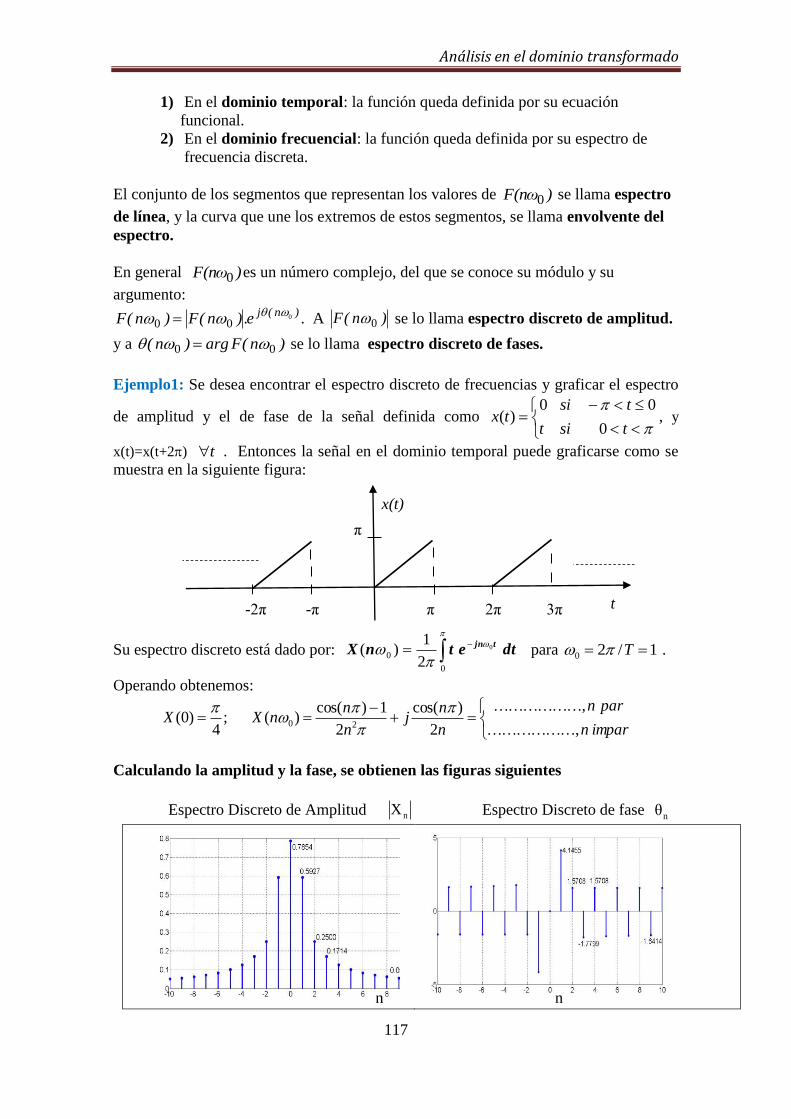
Análisis en el dominio transformado
117
1) En el dominio temporal: la función queda definida por su ecuación
funcional.
2) En el dominio frecuencial: la función queda definida por su espectro de
frecuencia discreta.
El conjunto de los segmentos que representan los valores de )F(nω0 se llama espectro
de línea, y la curva que une los extremos de estos segmentos, se llama envolvente del
espectro.
En general )F(nω0 es un número complejo, del que se conoce su módulo y su
argumento: )n(j
e.)n(F)n(F 0
00 . A )n(F 0 se lo llama espectro discreto de amplitud.
y a )n(Farg)n( 00 se lo llama espectro discreto de fases.
Ejemplo1: Se desea encontrar el espectro discreto de frecuencias y graficar el espectro
de amplitud y el de fase de la señal definida como
tsit
tsitx
0
00)( , y
x(t)=x(t+2) t . Entonces la señal en el dominio temporal puede graficarse como se
muestra en la siguiente figura:
Su espectro discreto está dado por:
0
00
2
1)( dtetnX
tjn para 1/20 T .
Operando obtenemos:
imparn
parn
n
nj
n
nnXX
,
,
2
)cos(
2
1)cos()(;
4)0(
20
Calculando la amplitud y la fase, se obtienen las figuras siguientes
Espectro Discreto de Amplitud nX Espectro Discreto de fase nθ
n n
π
π
x(t)
t 3π -2π -π 2π

Análisis en el dominio transformado
118
Ejemplo 2: Sea f(t) la señal dada por la figura:
2
d-5d
2-d-2d -3d
2
-d
2
T
A
f(t)
2dd 3d
2
5d
2t
Los coeficientes de Fourier de f(t), calculados anteriormente están dados por:
dT;Zn,dn
csin.T
Adcn 2
2
0
. Entonces el espectro de frecuencia
discreta de f(t) es: Zn,2
dnsinc
T
Ad)F(n 0
0
,
el que también puede escribirse como: Zn,T
ndsinc
T
Ad)F(n 0
.
Tomemos valores particulares para d y T.
I)
421
2
5
1
2
1
10
10
/y
T
dT;d por lo tanto:
52
0 ndn , así:
Zn,5
nsinc
5
A)F(n 0
Si calculamos los ceros de
5
nsinc , es k5n0Zk,k
5
n
,
por lo tanto:
020455 0 Zk,k.k.k
n
.
La representación gráfica del espectro de frecuencia discreta F(n 0) es:
envolvente
F(nW0)
espectro de línea
A
nW0
5
0 20 40
F(n0)
……… ………

Análisis en el dominio transformado
119
El espectro de amplitud es: Zn,5
πnsinc.
5
A)F(n 0
y su representación
gráfica:
|F(nW0)|
5A
nW0
Para graficar el espectro de fase, debemos tener en cuenta que 0 n es una función
impar, propiedad que se demostrará más adelante. Además:
knk
nnn 54
20
00
Con estas observaciones y teniendo en cuenta que en este ejemplo, el espectro de
frecuencia discreta es un número real, resulta:
nW0
F (nW0)
II)
21
2
101
10
10 y
A
T
AdT;d por lo tanto:
102
0 ndn , así:
Zn,10
nsinc
10
A)F(n 0
Si calculamos los ceros de
10
nsinc tenemos: 0,20,10 Zkkkn
F(nW0)
10A
nW0
40 20 0 20 40 0
• • • • • • • • • • • • • • • •
40 20 20 40 0
…… …….
40 20 0 20 40 0
…… …….

Análisis en el dominio transformado
120
PROPIEDADES DEL ESPECTRO DISCRETO DE FRECUENCIAS
1) Simetría de los espectros de amplitud y de fase
El espectro de amplitud de una función real periódica f(t) es una función par de
“n0” y el espectro de fase es una función impar de “n0”.
Demostración Recordamos la propiedad ya vista de los coeficientes complejos de la Serie de
Fourier: nn cc . Entonces:
Zn,dte).t(fT
)n(F
T
T
tjn
2
2
00
1 , por lo tanto podemos expresar que:
1-1) )n(F)n(F 00 , si tomamos el módulo en ambos miembros queda:
)n(F)n(F)n(F 000 en consecuencia el espectro de amplitud es
una función par de “n0”.
1-2) Al ser F(n0) un número complejo conocemos su módulo y argumento, por lo
tanto si partimos de la misma propiedad que en 1-1) y expresamos según su
módulo y argumento, resulta:
)n(F)n(F 00
)n(j)n(je.)n(Fe.)n(F 00
00
En esta igualdad se verifica que los módulos son iguales, según lo demostrado
en el inciso anterior, )n(F)n(F 00 , y los argumentos también, es
decir:
(- 0n ) = - ( 0n ) ( 0n ) = - (- 0n ) .
En consecuencia, el espectro de fase es una función impar. Obsérvese que
si n = 0 también se verifica la propiedad.
2) Función trasladada en el tiempo
Si f(t) es una función periódica (real) de período T y t0 R, entonces el espectro de
amplitud de f(t-t0) es: )F(n 0 y el espectro de fase es: 0000 tnnn

Análisis en el dominio transformado
121
ESPECTRO DE POTENCIA
Si recordamos la definición ya vista, podemos afirmar que la potencia media asociada
a una señal periódica f(t), se define como:
T/2
T/2
2
m dtf(t)T
1P ,
fórmula que permite calcular, en el dominio del tiempo, la potencia de una señal.
Ejercicio: Si f(t) = A.ej(t + ) Pm = 2
A .
Calcularemos ahora la potencia de una señal, operando en el dominio de la frecuencia.
Si f(t) es una señal periódica de período T, entonces la descomposición de f(t) en
armónicas complejas de frecuencia “n0” con n Z, está dada por el desarrollo de f(t)
en serie exponencial de Fourier, o sea:
tjn
neF)t(f 0 donde
2
2
01
T
T
tjnn e).t(f
TF
. Como el sistema Zn,etjn
0 es completo, se cumple la
identidad de Parseval, o sea que:
1
n
2
n
n 1n
2
n
2
0
2
n
2
T
2
T
2FFFFdt)t(f
T
1
En la última sumatoria hacemos un cambio de variables, tal que nn ,
entonces
1n
2
n
1
n
2
n FF y nuevamente cambiamos nn , y nos queda:
1n
2
n
1n
2
n
2
0
2
T
2
T
2FFFdt)t(f
T
1,
ya que el espectro de amplitud es una función par, podemos escribir:
1n
2
n
2
0
1n
2
n
1n
2
n
2
0
2
T
2
T
2F2FFFFdt)t(f
T
1, finalmente:
1n
2
n
2
0
2
T
2
T
2F2Fdt)t(f
T
1
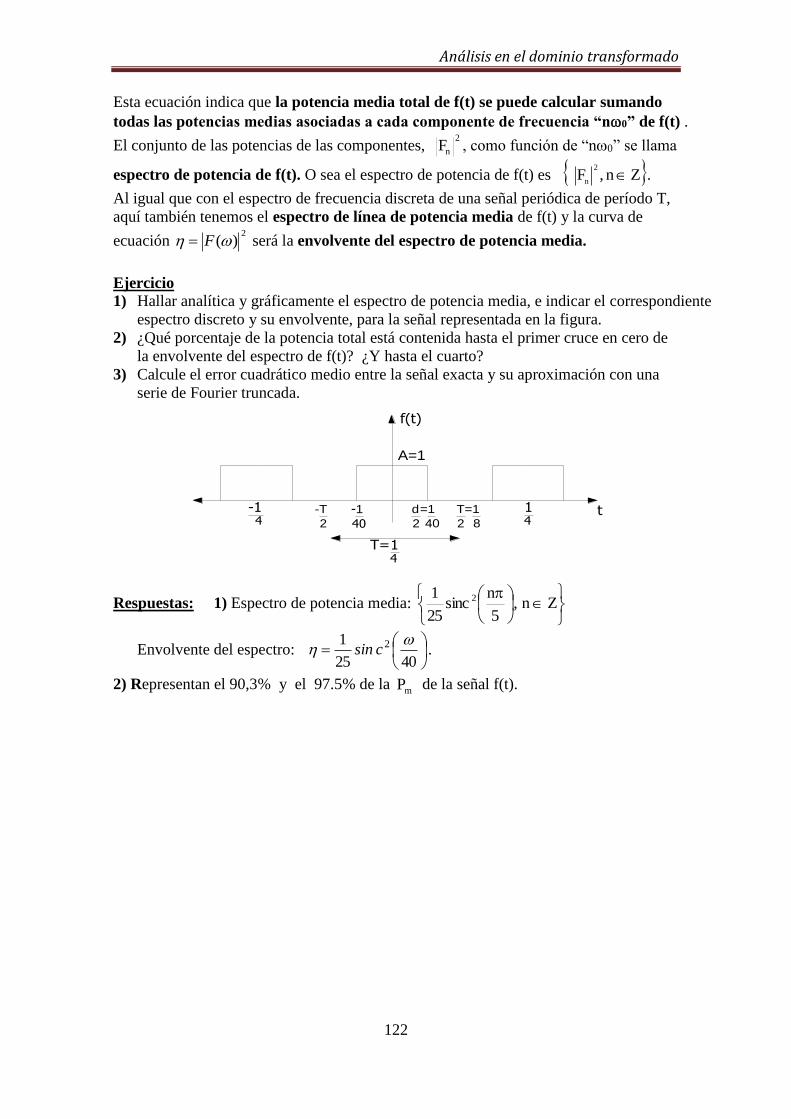
Análisis en el dominio transformado
122
Esta ecuación indica que la potencia media total de f(t) se puede calcular sumando
todas las potencias medias asociadas a cada componente de frecuencia “n0” de f(t) .
El conjunto de las potencias de las componentes, 2
nF , como función de “n0” se llama
espectro de potencia de f(t). O sea el espectro de potencia de f(t) es Zn,F2
n .
Al igual que con el espectro de frecuencia discreta de una señal periódica de período T,
aquí también tenemos el espectro de línea de potencia media de f(t) y la curva de
ecuación 2
)( F será la envolvente del espectro de potencia media.
Ejercicio
1) Hallar analítica y gráficamente el espectro de potencia media, e indicar el correspondiente
espectro discreto y su envolvente, para la señal representada en la figura.
2) ¿Qué porcentaje de la potencia total está contenida hasta el primer cruce en cero de
la envolvente del espectro de f(t)? ¿Y hasta el cuarto?
3) Calcule el error cuadrático medio entre la señal exacta y su aproximación con una
serie de Fourier truncada.
T=1
-1
40
A=1
f(t)
T t
4
4-1
41=1
8240
=1
2
d
2
-T
Respuestas: 1) Espectro de potencia media:
Zn,
5
nsinc
25
1 2
Envolvente del espectro:
4025
1 2 csin .
2) Representan el 90,3% y el 97.5% de la mP de la señal f(t).

Análisis en el dominio transformado
123
OTRAS PROPIEDADES DEL ESPECTRO DISCRETO DE FRECUENCIAS
3) Diferenciación en el tiempo
Si f(t) es una función periódica, de período T que admite derivada seccionalmente
continua en
2
T,
2
T hasta el orden k inclusive,
2
Tf
2
Tf 1k)1k( para k N,
entonces el espectro de frecuencia discreta de ),n(F.jn)t(fkk
00 n Z.
Si
tjn
n
tjn
n
e.)n(F.jn)t(fe.)n(F)t(f 00
000
10
00
k,e.)n(F.)jn()t(ftjn
n
kk
4) Integración en el tiempo
Sea f(t) una función periódica de período T, continua y
t
dx)x(f)t(g , entonces
g(t) es una función periódica, de período T si y sólo si
2
T
2
T
dt)t(f = 0 y su espectro de
frecuencia discreta es:
2
2
0
0
0
01
0
0
T
T
n,dt)t(gT
)(G
n,jn
)n(F
)n(G
5) Desplazamiento en frecuencia
Sea f(t) una función periódica de período T y a Z entonces la función
)t(f.e)t(gtja 0
es periódica de período T y su espectro de frecuencia discreta es:
Zn,anF)an(F)n(G 0000
6) Convolución en frecuencia
Si f(t) y g(t) son funciones periódicas de período T y f(t).g(t) es una función de
período T>0, entonces el espectro de frecuencia discreta de h(t) = f(t).g(t) es:
H(n0) = F(n0) * G(n0) =
k0.kn).G0F(k , n Z.

Análisis en el dominio transformado
124
7) Convolución periódica en el tiempo
Si f(t) y g(t) son funciones periódicas, de período T, pertenecientes al
2
T,
2
TQ ,
entonces la función
2
2
1
T
T
dx)x(g).xt(fT
)t(h (A) es continua en
2
T,
2
T, es
periódica de período T y su espectro de frecuencia discreta es :
H(n0) = F(n0).G(n0)
Ejercicio
Sean las señales periódicas f(t) y g(t) indicadas en las gráficas, se pide:
a) Calcular la convolución periódica de f(t) y g(t)
b) Encontrar el espectro de frecuencia discreta de h(t), definida como el resultado de a)
c) Verificar el espectro obtenido en b), mediante el teorema de convolución en el
tiempo.
T
a
f(t)
t
T
a
g(t)
t
-a
Respuestas:
t2
)t(2
a2
t2
t2
a2
t)t(2
a
)t(h
2
2
2
a)
00
0222
2
0
n
nn
senn
aj
)n(H
c) Zn,n
csina
)n(F
220
0n
2
ncos1
n
ja
0n0
)nw(G 0
2 2
2
2
2 2
2
2

Análisis en el dominio transformado
125
Una vez hecho el producto en frecuencia se obtiene )n(H 0 igual que en b).
Resolución del a)
T
a
f(t)
t
-a
a
t
-a
a
t
Si
tt2
30
2 No tiene sentido ya que las variaciones de
Si 22
0
tt
a
t
Si 022
tt
a
t
Si 2
02
3 tt
2
2
2
2
t
t
t2
t2
g tg
t2
2
2
t
t
t2
t2
2
2
t
t
t2
T
a
g(t)
t
-a
2
2
dtgfdtgfT
th
T
T
)()(2
1)()(
1)(
2
2
t
ta
d)a(a)t(h 2
2
22
2
22
1
)(2
)(2
ta
th si 2
t
t
t
t
dadath2
2
2
2 )(2
1)(
ttatath
222
1)( 22
222
1)( 222
aatath
2)(
2tath si 0
2 t
,t
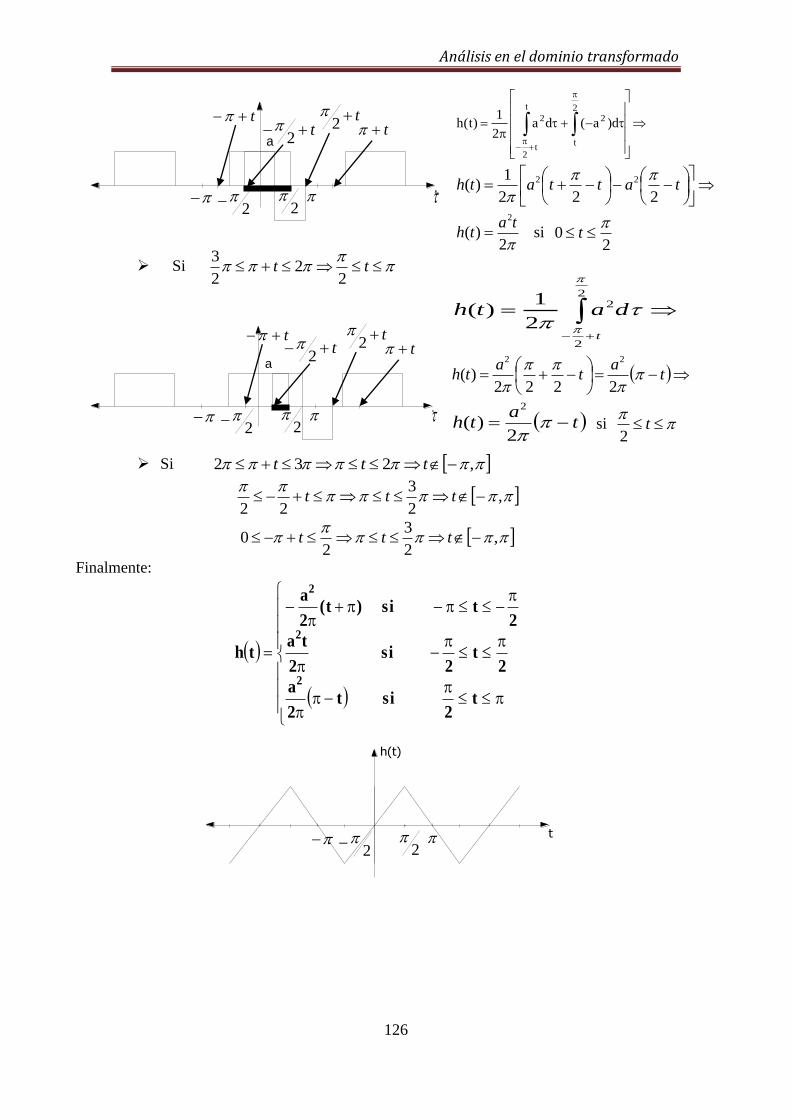
Análisis en el dominio transformado
126
a
t
Si
tt2
22
3
a
t
Si ,232 ttt
,2
3
22 ttt
,2
3
20 ttt
Finalmente:
t2
sit2
a
2t
2si
2
ta
2tsi)t(
2
a
th
2
2
2
h(t)
t
2
2
2
2
t2
t
t
t2
t2
2
2
t
t
t2
2
2
2
2
1)(
t
dath
t
at
ath
2222)(
22
ta
th 2
)(2
si
t2
2
t
2
t
t2
2 d)a(da2
1)t(h
tattath
222
1)( 22
2)(
2tath si
20
t

Análisis en el dominio transformado
127
RESUMEN DE FÓRMULAS
Serie exponencial o compleja de Fourier
f(t) = n
0jnw t
c en
donde
T
2
n
T
2
0jnw t1
f(t).e dtT
c
y 0
2πw
T
Serie trigonométrica de Fourier
n 0 n 0
n 1
0 a cos(nw t) b sen(nw t)a
f(t)2
con
T
2
0
T
2
2a f(t)dt
T
;
T
2
n 0
T
2
2a f(t)cos(nw t) dt
T
T
2
n 0
T
2
2b f(t)sen(nw t) dt
T
Si f(t) es par:
n 0
n 1
0 a cos(nw t)a
f(t)2
con :
T
2
0
0
4a f(t)dt
T ;
T
2
n 0
0
4a f(t)cos(nw t) dt
T ; bn= 0
Si f(t) es impar:
n 0
n 1
b sen(nw t)f(t)
con : a0 = an = 0 ;
T
2
n 0
0
4b f(t) sen(nw t) dt
T
Si f(t)tiene simetría de media onda contiene solamente armónicas impares
2n 1 0 2n 1 0
n 1
a cos(2n 1)w t b sen(2n 1)w tf(t)
con a0 = 0
T
2
2n 1 0
0
4a f(t)cos(2n 1)w t dt
T
T
2
2n 1 0
0
4b f(t) sen(2n 1)w t dt
T
Identidad de Parseval
Si utilizamos la serie compleja de Fourier:
n
2
n
2
T
2
T
2cdtf(t)
T
1
Si utilizamos la serie trigonométrica de Fourier:
1n
2
n
2
n
2
02
T
2
T
2ba
2
1
4
adtf(t)
T
1
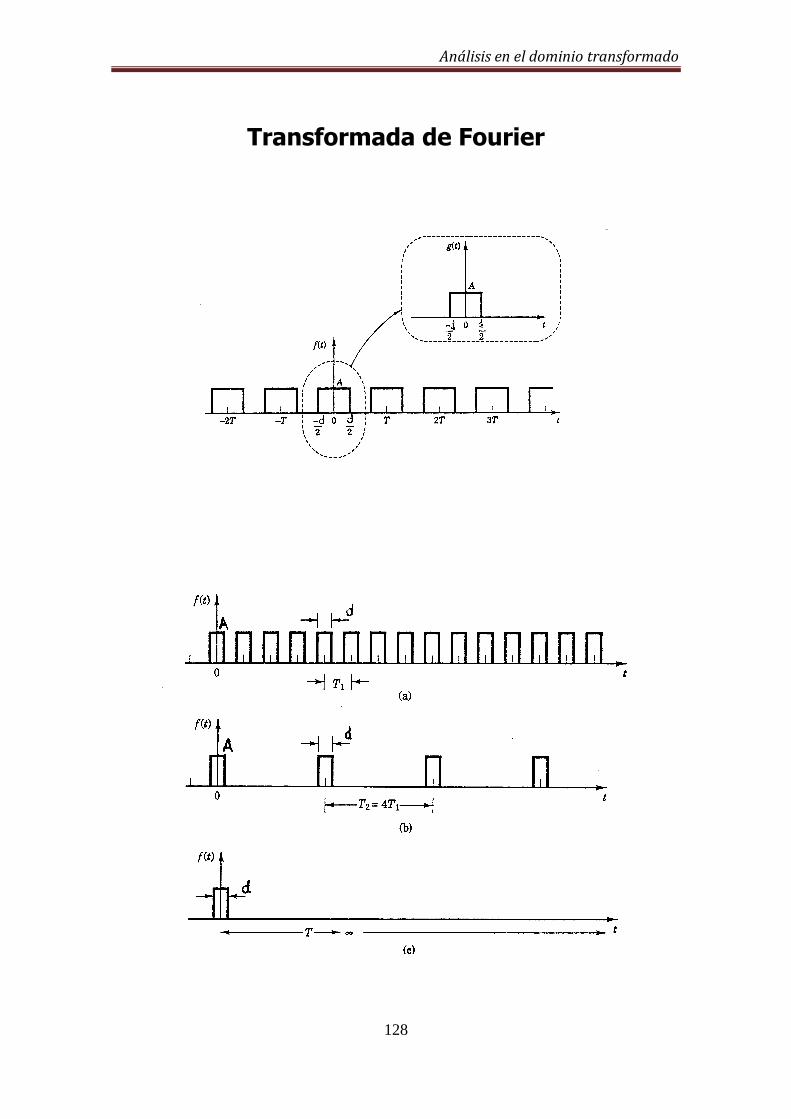
Análisis en el dominio transformado
128
Transformada de Fourier
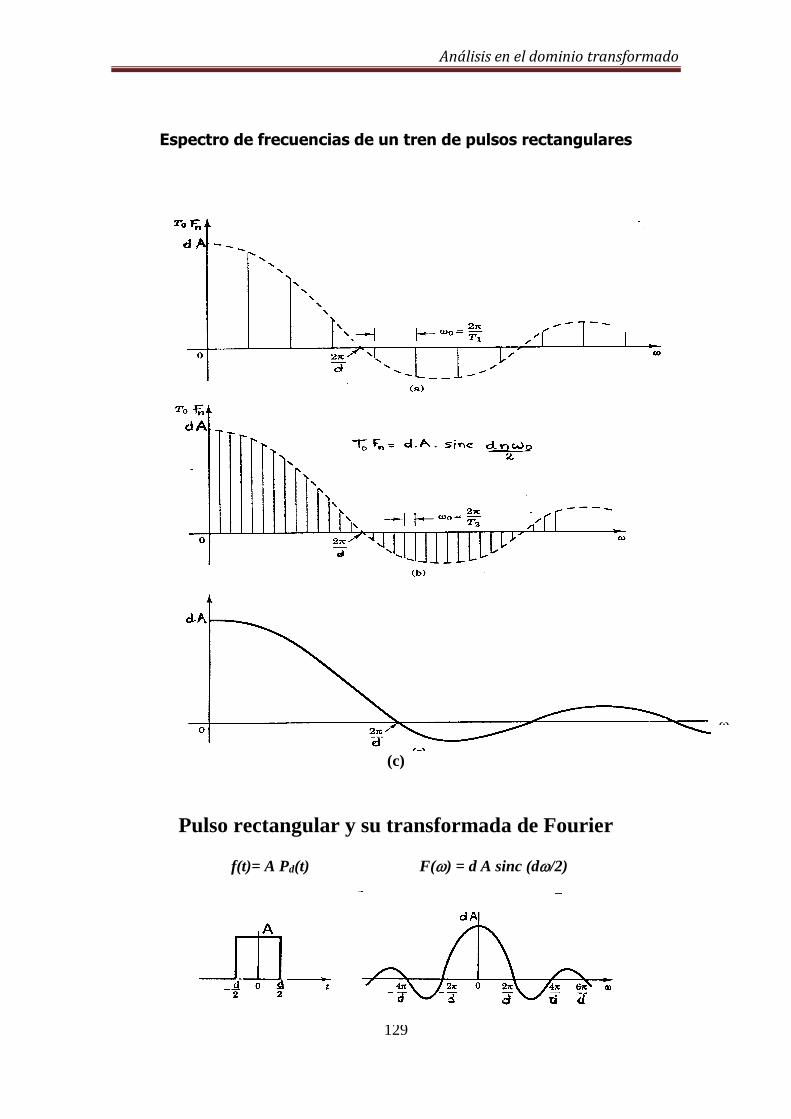
Análisis en el dominio transformado
129
Espectro de frecuencias de un tren de pulsos rectangulares
(c)
Pulso rectangular y su transformada de Fourier
f(t)= A Pd(t) F() = d A sinc (d/2)

Análisis en el dominio transformado
130
1. Motivación: El dominio de la frecuencia
Se ha considerado hasta ahora, el análisis de sistemas fundamentalmente en el dominio
del tiempo, es decir cuando las señales de entrada y salida se representan como
funciones del tiempo. Sin embargo, a menudo es más conveniente analizar señales y
sistemas cuando están representados en el dominio de la frecuencia. El dominio de la
frecuencia es probablemente el concepto más importante en la teoría de señales y
sistemas.
Para llevar a cabo el análisis en el dominio de la frecuencia, haremos uso de la
Transformada de Fourier , operación matemática que tiene una multitud de
aplicaciones en muchas áreas de la ciencia e ingeniería: el procesamiento de señales,
la teoría de la probabilidad, la óptica, la propagación de ondas y otras áreas.
La rama de la matemática que estudia T. de Fourier y sus generalizaciones es
denominada análisis armónico.
La T. de Fourier goza de una serie de propiedades de continuidad que garantizan que
puede extenderse a espacios de funciones mayores e incluso a espacios de funciones
generalizadas.
En procesamiento de señales la transformada de Fourier suele considerarse como la
descomposición de una señal en componentes de frecuencias diferentes. Puede decirse
que es básicamente el espectro de frecuencias de una función. Un buen ejemplo de eso
es lo que hace el oído humano, ya que recibe una onda auditiva y la transforma en una
descomposición en distintas frecuencias (que es lo que finalmente se escucha). El oído
humano va percibiendo distintas frecuencias a medida que pasa el tiempo, sin embargo,
la transformada de Fourier contiene todas las frecuencias contenidas en todos los
tiempos en que existió la señal; es decir, en la transformada de Fourier se obtiene un
sólo espectro de frecuencias para toda la función.
Recordemos algo sobre Sistemas lineales e invariantes en el tiempo (SLIT )
1. Considere que la entrada del sistema es una señal x(t) cualquiera. La salida será:
)]([)( txLty
que es una forma de escribir la relación matemática que vincula la entrada con la salida,
la que está estrictamente dada por una ecuación diferencial ordinaria del tipo:
ad y t
dta
d y t
dta y t b
d x t
dtb
d x t
dtb x tn
n
n n
n
n m
m
m m
m
m
( ) ( )( )
( ) ( )( )
1
1 0 1
1
1 0
Llamando: Dd
dt , A D a D a D an
nn
n( )
11
0 y B D b D b D bmm
mm( )
11
0
resulta la forma operacional : y t H D x t( ) ( ) ( ) ,
donde H DB D
A D( )
( )
( ) : es la “función operacional del sistema”.
2. Si la entrada del sistema es una señal x(t) exponencial imaginaria:
x t e j t( ) con
2
T
se puede ver que y t L x t k e k x tj t( ) [ ( )] ( )
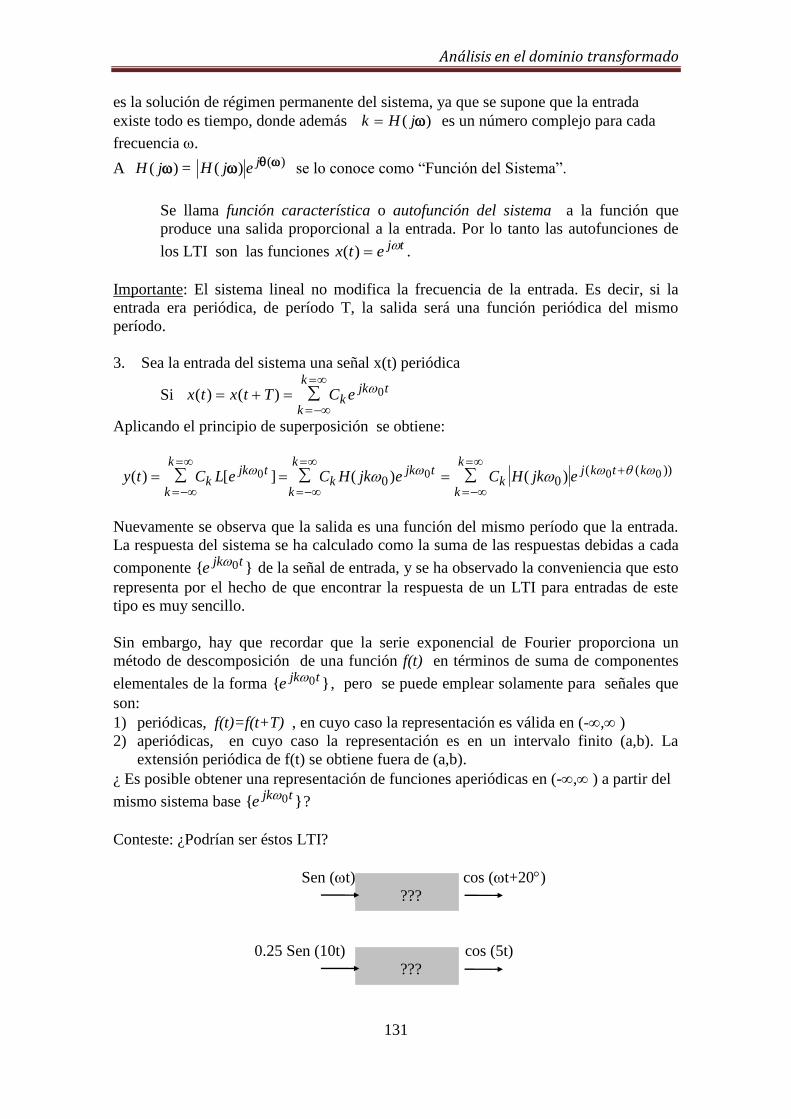
Análisis en el dominio transformado
131
es la solución de régimen permanente del sistema, ya que se supone que la entrada
existe todo es tiempo, donde además )( jHk es un número complejo para cada
frecuencia .
A )( jH = )()( jejH se lo conoce como “Función del Sistema”.
Se llama función característica o autofunción del sistema a la función que
produce una salida proporcional a la entrada. Por lo tanto las autofunciones de
los LTI son las funciones x t e j t( ) .
Importante: El sistema lineal no modifica la frecuencia de la entrada. Es decir, si la
entrada era periódica, de período T, la salida será una función periódica del mismo
período.
3. Sea la entrada del sistema una señal x(t) periódica
Si x t x t T C ekjk t
k
k
( ) ( )
0
Aplicando el principio de superposición se obtiene:
y t C L e C H jk e C H jk ekjk t
k
k
kjk t
k
k
kj k t k
k
k
( ) [ ] ( ) ( ) ( ( ))
0 0 0 00 0
Nuevamente se observa que la salida es una función del mismo período que la entrada.
La respuesta del sistema se ha calculado como la suma de las respuestas debidas a cada
componente { }e jk t0 de la señal de entrada, y se ha observado la conveniencia que esto
representa por el hecho de que encontrar la respuesta de un LTI para entradas de este
tipo es muy sencillo.
Sin embargo, hay que recordar que la serie exponencial de Fourier proporciona un
método de descomposición de una función f(t) en términos de suma de componentes
elementales de la forma { }e jk t0 , pero se puede emplear solamente para señales que
son:
1) periódicas, f(t)=f(t+T) , en cuyo caso la representación es válida en (-, )
2) aperiódicas, en cuyo caso la representación es en un intervalo finito (a,b). La
extensión periódica de f(t) se obtiene fuera de (a,b).
¿ Es posible obtener una representación de funciones aperiódicas en (-, ) a partir del
mismo sistema base { }e jk t0 ?
Conteste: ¿Podrían ser éstos LTI?
Sen (t) cos (t+20)
???
0.25 Sen (10t) cos (5t)
???

Análisis en el dominio transformado
132
2. La Transformada de Fourier
La T. de Fourier es una de las técnicas de procesamiento de señales más usadas.
Es una transformación matemática que sirve para encontrar la representación
frecuencial de una señal a partir de su representación temporal. Una vez en el dominio
frecuencial, es posible analizar el “contenido de frecuencia” de la señal, es decir, la
proporción relativa de las diferentes frecuencias presentes en la misma.
dtetfFtftj )()()}({F (1)
)}({=)(2
1=)( 1-
FdeFtf
tj F
(2)
Las dos expresiones recuadradas definen la Transformada de Fourier, y la Transformada
inversa de Fourier, respectivamente. Se las llama normalmente Pares transformados, y
se las representa mediante la notación:
)(Ftf )( (3)
La expresión (2) se interpreta como la descomposición de f(t) en términos de una suma
continua de funciones elementales ej t
.
A F( ) se lo llama espectro continuo de frecuencia de f(t). En general,
F( ) será una función compleja de la variable real y por lo tanto se puede escribir de
la forma
F F e j( ) ( ) ( ) (4)
donde: F( ) es el espectro de amplitud de f(t)
( ) es el espectro de fase de f(t).
Se utiliza también normalmente la notación: F R jX( ) ( ) ( )
donde: R() = Real [F()] y X() = Im [F()]
Forma trigonométrica: F f t t dt j f t t dt( ) ( ) cos( ) ( ) sen( )
donde, en el caso mas general f(t): R C
Importante: No todas las funciones se pueden desarrollar en suma continua de
exponenciales complejas ej t
.

Análisis en el dominio transformado
133
Teorema de la integral de Fourier
Si f(t) definida en - < t < cumple con las condiciones de Dirichlet, es decir
es:
1) en todo intervalo:
acotada
tiene un número finito de máximos y mínimos
tiene un número finito de discontinuidades
2) absolutamente integrable en R, es decir:
f t dt( )
entonces, la T. de Fourier existe y es única, y también existe su transformada inversa, es
decir:
ff FF 1- , (6)
siendo F y 1-F operadores lineales que representan las transformaciones ya
expresadas en las ecuaciones (1) y (2).
Demostración:
x
-
ddtxj
exfddxtxj
exf
dtjedxxj
exfdtjeFtf
)()(
2
1)()(
2
1
)(2
1)(
2
1)(1FF
dxtx
txlimxfdxd
txjelimxf
)(
)(sen2)(
2
1)()(
2
1
)t(fdx)tx()x(f
dx)tx(csinlim)x(fdx)tx(csinlim)x(f
2
122
2
12
1
2
1
Observar que las condiciones de Dirichlet son condiciones suficientes, pero no
necesarias. Muchas señales útiles no cumplen estas condiciones, como las señales de
potencia, y sin embargo se podrán analizar mediante la T. de Fourier, como se verá más
adelante.
Transformada de algunas señales de energía sencillas
Ahora se considerarán varios ejemplos de transformadas de Fourier de señales de
energía sencillas a fin de dar una idea de cómo obtener el espectro continuo de
frecuencia para una función f(t).

Análisis en el dominio transformado
134
Transformadas de Fourier de un pulso rectangular
Para la señal gd(t) de la figura:
a) Calcular y graficar el espectro de frecuencia contínua
b) Determinar el espectro de amplitud y el de fase y dibujarlos
c) Determinar la representación integral (de Fourier) de gd(t)
d) Expresar en forma trigonométrica la integral anterior y calcular su valor para t=0
La función pulso rectangular que se muestra en la FIGURA 1
tiene una ecuación dada por:
1, td /2
gd (t) =
0, los demás valores t
a) Su transformada, o espectro continuo de frecuencia Gd (), (FIGURA 2) , está dada
por:
Gd ()={gd (t)=
gd (t) e
-jt dt 2/dtj2/d
2/d
tj
2/d)j/(edte1
ωωω
= 2
2
/d
)/d(send
= d . sinc(d/2)
b) Asi ,el espectro de amplitud es: Gd ()=d sinc(d/2)
y el espectro de fase es:
0, sinc(d/2)>0
()= , sinc(d/2)<0 si >0
-, sinc(d/2)<0 si <0
FIGURA 1 FIGURA 2
-d/2 0 d/2
t
.gd(t)
1
-4/d -2/d 0 2/d 4/d
Gd()
d
. . . . . . . .
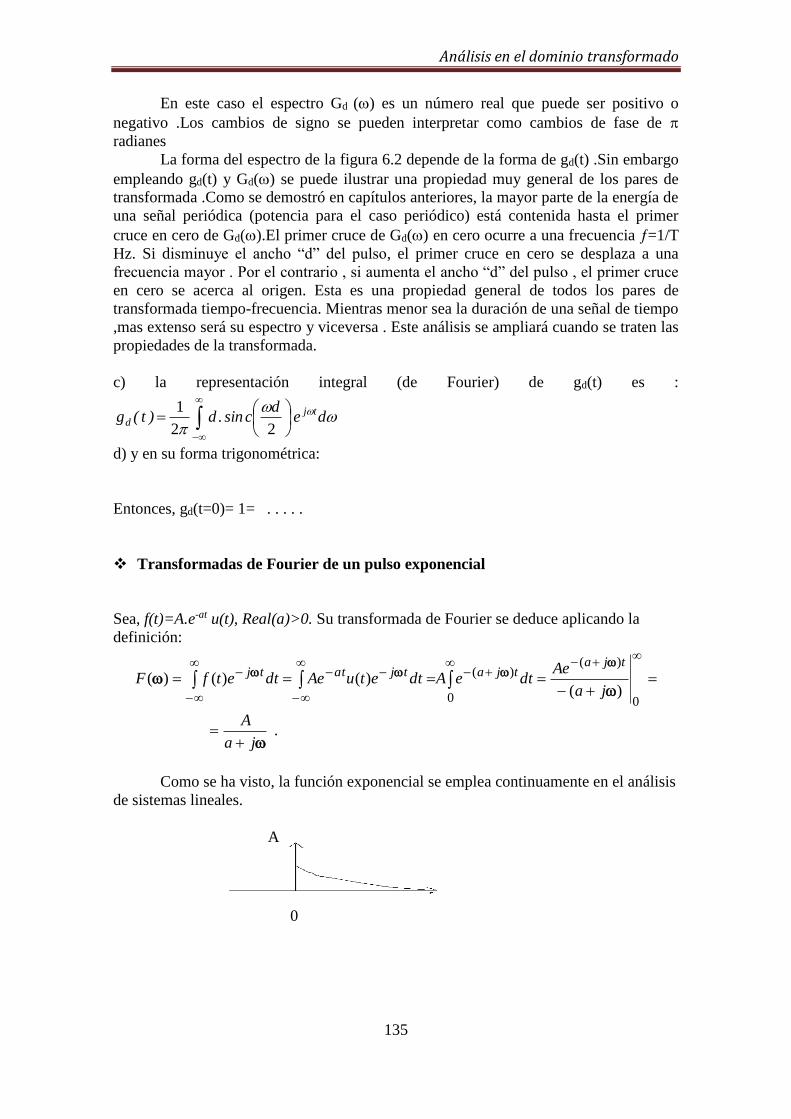
Análisis en el dominio transformado
135
En este caso el espectro Gd () es un número real que puede ser positivo o
negativo .Los cambios de signo se pueden interpretar como cambios de fase de
radianes
La forma del espectro de la figura 6.2 depende de la forma de gd(t) .Sin embargo
empleando gd(t) y Gd() se puede ilustrar una propiedad muy general de los pares de
transformada .Como se demostró en capítulos anteriores, la mayor parte de la energía de
una señal periódica (potencia para el caso periódico) está contenida hasta el primer
cruce en cero de Gd().El primer cruce de Gd() en cero ocurre a una frecuencia =1/T
Hz. Si disminuye el ancho “d” del pulso, el primer cruce en cero se desplaza a una
frecuencia mayor . Por el contrario , si aumenta el ancho “d” del pulso , el primer cruce
en cero se acerca al origen. Esta es una propiedad general de todos los pares de
transformada tiempo-frecuencia. Mientras menor sea la duración de una señal de tiempo
,mas extenso será su espectro y viceversa . Este análisis se ampliará cuando se traten las
propiedades de la transformada.
c) la representación integral (de Fourier) de gd(t) es :
ded
csin.d)t(g tjd
22
1
d) y en su forma trigonométrica:
Entonces, gd(t=0)= 1= . . . . .
Transformadas de Fourier de un pulso exponencial
Sea, f(t)=A.e-at u(t), Real(a)>0. Su transformada de Fourier se deduce aplicando la
definición:
0
)(
0
)(
)()()()(
ja
AedteAdtetuAedtetfF
tjatjatjattj
ja
A
.
Como se ha visto, la función exponencial se emplea continuamente en el análisis
de sistemas lineales.
0
A
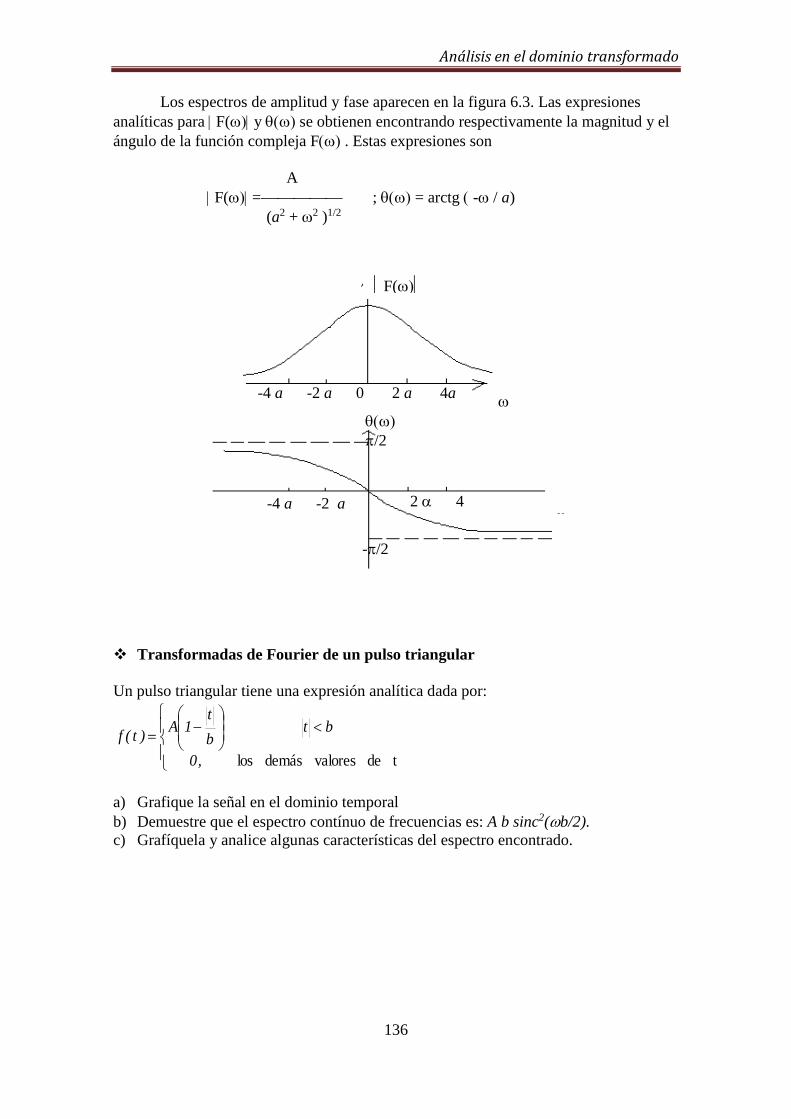
Análisis en el dominio transformado
136
Los espectros de amplitud y fase aparecen en la figura 6.3. Las expresiones
analíticas para F( y se obtienen encontrando respectivamente la magnitud y el
ángulo de la función compleja F . Estas expresiones son
A
F( = ; = arctg - / a)
(a2 + 2 )1/2
Transformadas de Fourier de un pulso triangular
Un pulso triangular tiene una expresión analítica dada por:
tde valoresdemás los,0
btb
t1A
)t(f
a) Grafique la señal en el dominio temporal
b) Demuestre que el espectro contínuo de frecuencias es: A b sinc2(b/2).
c) Grafíquela y analice algunas características del espectro encontrado.
-/2
F(
-4 a -2 a 0 2 a 4a
/2
-4 a -2 a -2 0
2 4
a

Análisis en el dominio transformado
137
Transformada de Fourier de funciones absolutamente integrables
Transformada de Fourier de funciones reales.
Si además de ser absolutamente integrable, f(t) es una función real, entonces se pueden
analizar varias propiedades:
1) dttjetfFf
)()(F . Luego, para f(t) real, F(0) representa el área
bajo la curva.
2) tdttfR cos)()(
y R() es una función par de
tdttfX sen)()(
y X() es una función impar de
Demostración:
)()()( sen)(cos)()( jXRF dtttfjdtttfdttjetf
Ahora, observemos que
R(-) = dtttfdtttf )cos()()cos()(
= R(), por ser el cost una función
par con respecto a .
Análogamente resultará que : X() = - X(-) , por ser el sent una función impar de .
3) )()( FF
Demostración: (por propiedad 2): F(-) = R(-) + j X(-)
= R() - j X()= )(F
4) - El espectro de amplitud )(F es una función par de .
- El espectro de fase )( es una función impar de .
Demostración: ………………….
………………….
5) La fórmula de inversión puede desarrollarse, en todos los casos, de la forma:
dtjeFtf )(
2
1)(
tdsen)(Xdtcos)(Rd)tjsent(cos))(jX)(R()t(f2
1
2
1
2
1 (7)
Análisis en el dominio transformado
138
Trabajando algebraicamente la ec.(7), se ve que para funciones reales( f(t): R R ), se
anula la componente imaginaria, resultando entonces otra expresión para la fórmula de
inversión para funciones reales:
0
sen)(1
0
cos)(1
)(
dtXdtRtf (8)
Demostración: ………………….
………………….
6) Si f(t) es real y par de t , resultará que 0sen)()(
dtttfX
F() es real; y podrá calcularse como dtttfF cos
0
)(2)(
y su inversa, de acuerdo a ec.(8) puede escribirse como:
0
cos)(1
)(
dtRtf
7) Si f(t) es real e impar de t , entonces 0cos)()(
tdttfR
F() es imaginario puro . Luego: dtttfjF sen
0
)(2)(
y su inversa:
0
sen)(1
)(
dtXtf
La propiedad recíproca también es cierta:
-Si la T. de Fourier es real f es par.
-Si la T. de Fourier es imaginaria f es impar.
PROPIEDADES DE LA TRANSFORMADA DE FOURIER
Como ya se ha dicho, la T. de Fourier es otro método de representación de una
función f(t). Estas dos descripciones son útiles en ingeniería porque, con frecuencia,
alguna de ellas es más fácil de emplear en una aplicación particular o es más intuitiva en
determinado problema. Por supuesto, la elección depende de cada caso. La
transformación entre los dos dominios es relativamente directa empleando las
definiciones. Sin embargo es útil estudiar el efecto que se produce en uno de los
dominios al operar en el otro. Esto no sólo permite pasar de un dominio a otro, sino
también observar ciertos aspectos físicos básicos de la señal y del sistema, que de otra
manera no se observarían (como la relación inversa entre el tiempo de duración y el
ancho de banda). Así, se podría preguntar, por ejemplo, ¿cuál es la relación entre las
transformadas de una función del tiempo y la integral de ella?. ¿Qué sucede a la inversa
de una función en el dominio de la frecuencia si ésta se traslada en frecuencia? En esta
sección se da respuesta a este tipo de preguntas, analizando algunas propiedades de la T.
de Fourier.
1) Linealidad La T. de Fourier es una operación lineal. Es decir, si

Análisis en el dominio transformado
139
)()( 11 Ftf y )()( 22 Ftf
entonces, )()()()( 2121 bFaFtbftaf , con a y b constantes.
La comprobación de la ecuación anterior es inmediata, ya que las transformadas son
integrales de funciones del tiempo y la integración es una operación lineal.
2) Simetría o Dualidad
Observemos las ecuaciones de f(t) y su transformada F().
deFtf tj)(2
1)( ;
dtetfF tj )()(
Es evidente su simetría respecto a las variables t y . Esta simetría se puede emplear
provechosamente para ampliar la tabla de pares de transformada.
Si )()( Ftf
Entonces: )(2)( ftF
Comprobación:
Puesto que
deFtf tj)(2
1)( . Llame como ’, y escriba esta expresión
para –t.
Entonces será:
')'()(2 ' deFtf tj . Cambiando ahora el nombre de la variable
t por , queda
')'()(2 ' deFf j .
La forma más familiar se obtiene reemplazando ’ por t :
)}({)()(2 tFdtetFf jt F
Observe que para el caso particular de f(t) función par, entonces:
)(2)}({ ftF F
Ejemplos: Aplique esta propiedad para encontrar la T. de Fouirer de las funciones
Sinc(at) y Sinc2(at) .
3) Escala
Si )()( Ftf
Entonces, para la constante a real
aF
aatf
1)(
Comprobación: (para a>0 y a<0 ) . . . . . . . . . . . . . .
Analice el caso particular en que a=-1.
Observe que la propiedad de escala cuantifica la relación tiempo de duración-ancho de
banda entre una función de tiempo y su transformada. Si a>1, entonces f(at), como
Análisis en el dominio transformado
140
función de tiempo, es la función f(t) con una escala de tiempo reducida en un factor a.
De la misma manera, F(/a) representa la función F() con una escala de frecuencia
expandida por el factor a.
Si a<1, entonces f(at) representa una expansión de f(t) y F(/a) representa una
compresión de F(). Así, cuando se reduce el tiempo de duración de una señal, se
aumenta la distribución de su espectro de frecuencia. Al comprimir el tiempo de
duración de una señal se producen transiciones mas rápidas y por lo tanto se requieren
componentes de alta frecuencia en el espectro. De igual modo, al aumentar el tiempo de
duración de la señal las transiciones se producen en intervalos mayores, lo que se puede
lograr con componentes de frecuencia menor en el espectro.
4) Convolución en el tiempo
La convolución es una caracterización muy importante de la relación entrada-salida
de los sistemas lineales invariantes en el tiempo. No siempre es fácil de resolver la
integral de convolución. El dominio de la trasformada proporciona un método
conveniente para realizar esta operación.
Si )()( Xtx , y )()( Hth
entonces
)()()()(.)()( HXYdthxty
Demostración: . . . . . . . . . . . ..
Aplicación en sistemas LIT
Definición de Filtros pasa alto, pasa bajo y pasa banda.
5) Convolución en frecuencia
Si )()( Ftf , y )()( Gtg
entonces,
)(*)(2
1)().(
GFtgtf
Demostración: . . . . . . . . . . . ..
Espectro de Energía
Cuando se trabajó con funciones periódicas, se demostró que la potencia en el tiempo se
puede asociar con la potencia contenida en cada componente armónica de la señal. Es
posible aplicar estos resultados a las señales no periódicas representadas por sus T. de
Fourier. La energía de las señales de energía no periódicas en el intervalo (-,) es
finita, mientras que la potencia (energía por unidad de tiempo) es cero. Así, el concepto
de espectro de energía, en vez de espectro de potencia, es más útil para el caso de
X() H() Y()= X() H()

Análisis en el dominio transformado
141
señales de energía no periódicas. La energía asociada a f(t), función real de t , se define
como:
dttfE )(2
Si se emplea la representación integral de f(t) :
deFtf tj)(2
1=)( , se puede
escribir:
dFFddtetfFdtdeFtfE tjtj )()(2
1)()(
2
1)(
2
1)(
Como f(t) es real, )()( FF . Entonces, 2
)()()( FFF y sustituyendo en
el último desarrollo queda:
dFdttfE22 )(
2
1)( : Relación de Parseval
Si f(t) fuese una señal compleja, entonces puede deducirse que la Relación de Parseval
toma la forma:
d)(FdttftfE2
__
2
1)( )( .
La relación de Parseval expresa la energía de f(t) en términos del espectro continuo de
frecuencia de f(t) , la que resulta igual al área bajo la curva de la función
2
2)(F
. Esta
es una función par y real de , por lo cual puede escribirse la integral, integrando doble
entre cero e infinito, con lo que resulta:
00
22 )()(22
1)(
dSdFdttfE
En la ecuación anterior, la Energía ha sido también expresada integrando la denomina
densidad espectral de energía:
2)(
)(F
S . Cuando se analizaron las funciones
periódicas se asoció cierta cantidad de potencia con cada armónica. En el caso de las
señales de energía, se asocia la energía con bandas continuas de frecuencia. La energía
contenida en la banda de frecuencia (1,2) es simplemente el área bajo S()
comprendida entre 1 y 2 . Por ejemplo, si se tiene la función pulso rectangular y su
espectro continuo de frecuencia, el área sombreada es la energía de GT() contenida en
la banda de frecuencia (-2,-1) U (1,2) . (Ver el gráfico).

Análisis en el dominio transformado
142
6) Desplazamiento en tiempo
Si
f(t) F entonces
f(t – t0 ) F . 0tje
(11)
Comprobación: Por definición, se tiene que la transformada de Fourier de f (t - t0) es:
{ f( t – t0 ) } = dtettf tj
)( 0
Si, x = t – t0 , entonces dx = dt y t = t0 + x. De esta manera
{ f( t – t0 ) } = dxexfxtj )( 0)(
= 0tje
F.
La función f (t – t0 ) representa f(t) retardada t0 segundos. El teorema establece
que el espectro original esta multiplicado por 0tje
. Esta multiplicación no afecta al
espectro de amplitud del espectro original. Sin embargo, cada componente de frecuencia
esta desplazada en fase una cantidad -t0 . Esto es lógico, ya que el desplazamiento t0 en
el tiempo corresponde a un cambio de fase de -t0 para una componente de frecuencia
de rad/seg. Por ejemplo el doble pulso rectangular de la figura, tiene un espectro dado
por
f(t) }= e-jDT sinc ( T/ 2 ) + ejD T sinc(T/ 2).
.f(t)
0 D-T/2 D+T/2 t
D
D
_1

Análisis en el dominio transformado
143
7) Desplazamiento en frecuencia - modulación
La traslación o desplazamiento en frecuencia es una operación importante en
sistemas de comunicación. Si
f(t) F
entonces
f(t).tj oe
F( - 0 ) (12)
Comprobación: Por definición, la transformada de f(t).tj oe
es
f(t).tj oe
} = dteetf tjtj
0)( = dtetf
tj )( 0)(
= F (-0 )
es decir, f(t).tj oe
F( - 0 )
8) Diferenciación en el tiempo
Si )()( Ftf
Entonces, )()(
Fjdt
tdf
siendo el caso más general: )()()(
Fjdt
tfd n
n
n
Demostración : . . . . . . . (sugerencia: diferenciar con respecto al tiempo ambos
miembros de la ecuación que da la fórmula de inversión de la T. de Fourier).
9) Diferenciación en frecuencia
Si )()( Ftf
Entonces, n
nn
d
Fdtfjt
)()()(
Prueba:
)()()()()(
tfjtdtetfjtd
dF tj F
Ejemplo: Aplique la propiedad anterior para demostrar que
1)(
!)(
n
atn
ja
ntuet
F , para a>0.

Análisis en el dominio transformado
144
10) Integración restringida
Con la propiedad 8) podemos “intentar” obtener la expresión de la integral, pero
recordemos de “Análisis Matemático” , que en realidad, integrar y derivar no son
funciones inversas.
Si )(Fjdt
)t(dfωω
Podemos pensar que )(F ω
dt
)t(df
jF
1 .
Entonces, si definimos :
t
d)(f)t(g ττ de forma tal que )t(fdt
)t(dg
Será siempre cierto que )(F)(Gj ωωω
Pero, solamente será cierto que )(Fj
1)(G ω
ωω si :
dttfFF )()()0(0
=0 .
Analizar que esta condición significa que, para una dada f(t), señal de energía, entonces,
g(t) será también una señal de energía. Si esta condición no se cumple, deberá ampliarse
esta propiedad encontrando una expresión diferente.
11) Integración
A partir de la fundamentación detallada en la propiedad anterior, es posible enunciar, de
forma más general, la siguiente propiedad:
Si, f(t) y g(t) son señales que admiten T. de Fourier, y si
t
d)(f)t(g ττ entonces,
su transformada de Fourier puede expresarse como:
)()0()(1
)(
FFj
G
______________________________________________________________________

Análisis en el dominio transformado
145
Transmisión de señales a través de filtros lineales (SLTI)
Después del estudio de las propiedades de la T. de Fourier estamos en condiciones de
analizar algunas otras características de los LTI en el dominio frecuencial.
1. Llamando X() a la T. de Fourier de la entrada del sistema, e Y() a la T. de Fourier
de la salida del sistema, entonces la función del sistema se puede escribir como:
)(X
)(Y)jD(H
, para 0)( X .
2. Además, para sistemas estables, ya que h(t) es una señal de energía, será también
cierto que: )(H)jD(H = h(t)F .
La prueba es directa a partir de la relación ya deducida en el dominio temporal:
y(t)=x(t)*h(t)
Demostración: …………..
3. Es posible probar que el sistema modelado por:
)()()(
)()()(
01
1
101
1
txbdt
txdb
dt
txdbtya
dt
tyda
dt
tyda
m
m
mm
m
mn
n
nn
n
n
,
donde los coeficientes son constantes y no nulos, es invariable con respecto al tiempo,
haciendo uso de la T. de Fourier.
Prueba:
Sea Rot arbitrario pero fijo, y sean y(t) la respuesta del sistema a la entrada x(t) e
y1(t) la respuesta del sistema a la entrada x(t-to). Resulta entonces que:
))()()(
)()()(
01
1
11011
11
omo
m
mmo
m
mn
n
nn
n
n ttxbdt
ttxdb
dt
ttxdbtya
dt
tyda
dt
tyda
Si se aplica T. de Fourier a ambos miembros de la igualdad resulta:
)()()()()()()()()()( 0110111 ooom
mn
n ttxbttxjbttxjbYaYjaYja FFF
Además, )()(
Xettx otjo
F , en consecuencia, y utilizando la forma operacional
para el polinomio en j , se puede escribir:
oooo tjtjtj
n
mtjmn eYeXjHXe
jA
jBYXejBYjA
)()()()(
)(
)()()()()()( 11
)()()()( 11 otj
ttytyeYY o

Análisis en el dominio transformado
146
4. Relación entre la densidad espectral de energía de la entrada y la salida de un
sistema
La densidad espectral de energía de la salida del sistema será:
2)(
)(Y
Sy para 0
< .
Además, como 222
)()()()()()( HXYXjHY , luego,
222
)()()()(
)(
jHSjH
XS xy para 0 < .
Señales de Potencia. Transformada de Fourier de funciones no
absolutamente integrables
Señales como la función escalón, la función signo, y funciones periódicas, cumplen con
las condiciones de Dirichlet, salvo la de absoluta integrabilidad. Estas señales se llaman
de potencia. Su energía no es finita, pero su potencia si lo es. La característica de las
señales de potencia es que la Transformada de Fourier presentará, en general, funciones
impulso. Lo contrario sí puede afirmarse: si la señal tiene funciones impulsos en el
dominio transformado, entonces es una señal de potencia.
Transformadas de Fourier donde aparece la función Impulso.
Considere )()( 0ttAtf
Aplicando la definición surge que 0)()( 0tjtj AedtettAF
El par transformado es entonces:
0)( 0tj
AettA
El caso especial del impulso unitario en cero, se puede calcular a partir de la anterior
con t0=0, y A=1 , lo que da 1)( t
Consideremos también los casos en los que aparece la función impulso en la
frecuencia.
Sea: )()( 0 F

Análisis en el dominio transformado
147
Si se aplica la definición de la transformada inversa se encuentra que
tjetf 0
2
1)(
Es decir, que el par transformado sería )(2
10
0
tje , o lo que es
equivalente:
)(2 00
tje
Para el caso particular de 0=0, resulta el par: )(21
Y entonces, para a real o complejo, será )(2 aa
Transformadas de Fourier de señales que contienen funciones
sinusoidales
Demostrar que: )()(cos. 000 tF
)()(sen 000 jtF
Las expresiones anteriores constituyen la base matemática necesaria para comprender la
modulación. Por ejemplo la multiplicación de una función del tiempo f(t) (señal
moduladora) por una simusoide cosot (portatora), es:
)()(2
1cos*)(
2
1cos).( 0000
FFttfttf FFF
Función signo :
0,1
0,0
0,1
)sgn()(
t
t
t
ttf
Usando la propiedad de diferenciación, y como en este caso
)(2)][sgn()]([
tdt
td
dt
tfd ,
entonces, será: 2)( Fj
A partir de este resultado se determina que:
)(2
)(
kj
F
donde el término )(k es no nulo solamente para =0 y tiene en cuenta el valor
medio de f(t) . En general, este término debe estar incluído ya que la operación de
2sinc
2sinc
2cos 00
0
)()()t(P).t(F

Análisis en el dominio transformado
148
diferenciación en el tiempo presente en la expresión jF(), produce pérdida de
información acerca del valor medio de f(t).
En este caso particular, el valor medio de la función Signo es cero. Luego, a pesar de
que la función sgn(t) es una señal de potencia, cumple con la condición recuadrada en la
propiedad 10. Por lo tanto k=0 (k=2π<f>).
Entonces el par transformado es: j
t2
)sgn(
Función escalón unitario : )]sgn(1[2
1)()( ttutf
Combinando las propiedades de linealidad, la transformada de una constante y la de la
función signo, resulta:
j
tu1
)()(
Ejercicio: Demostrar que:
22
0
000j
)()(2
)t(u.)tcos(ωω
ωωωδωωδ
πω
F
Transformadas de Fourier donde aparece la derivada de la función Impulso.
Demostrar que: n
n
n
jdt
td)(
)(
y que n
nnn
d
djt
)(2
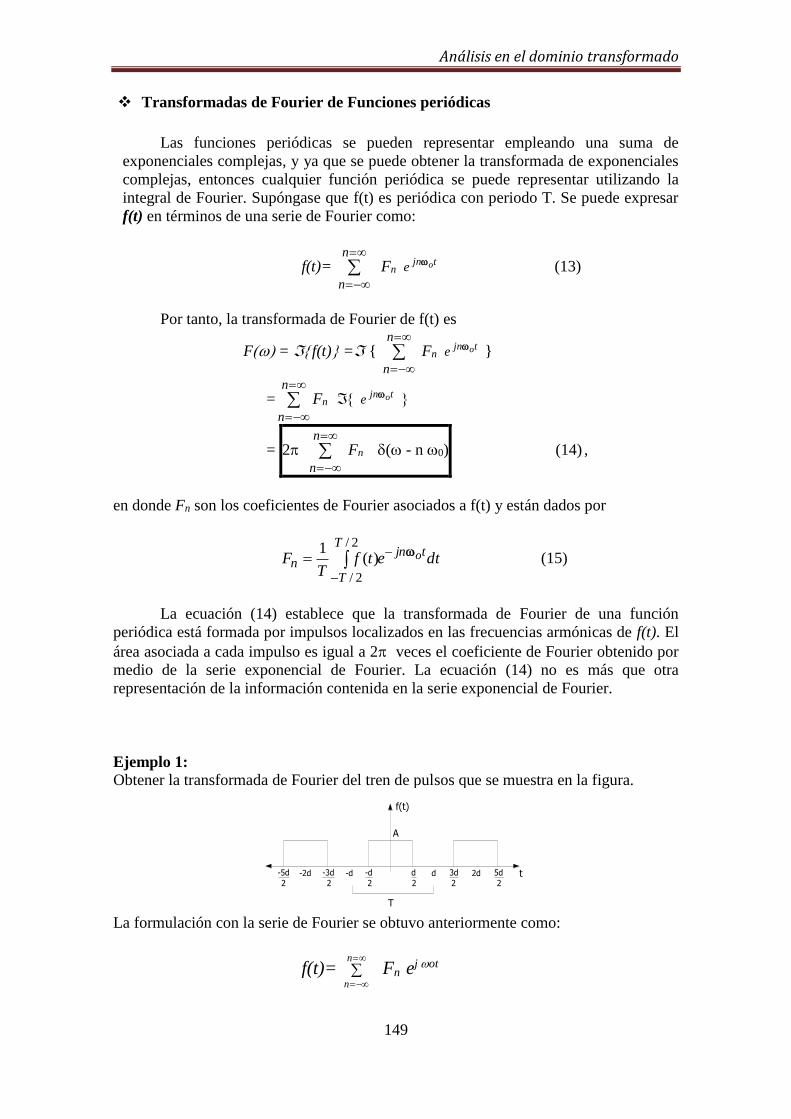
Análisis en el dominio transformado
149
Transformadas de Fourier de Funciones periódicas
Las funciones periódicas se pueden representar empleando una suma de
exponenciales complejas, y ya que se puede obtener la transformada de exponenciales
complejas, entonces cualquier función periódica se puede representar utilizando la
integral de Fourier. Supóngase que f(t) es periódica con periodo T. Se puede expresar
f(t) en términos de una serie de Fourier como:
f(t)=
n
n
Fn tjn oe
(13)
Por tanto, la transformada de Fourier de f(t) es
F = f(t) = {
n
n
Fn tjn oe
}
=
n
n
Fn tjn oe
= 2
n
n
Fn ( - n 0) (14) ,
en donde Fn son los coeficientes de Fourier asociados a f(t) y están dados por
dtetfT
Ftjn
T
Tn
o
2/
2/
)(1
(15)
La ecuación (14) establece que la transformada de Fourier de una función
periódica está formada por impulsos localizados en las frecuencias armónicas de f(t). El
área asociada a cada impulso es igual a 2 veces el coeficiente de Fourier obtenido por
medio de la serie exponencial de Fourier. La ecuación (14) no es más que otra
representación de la información contenida en la serie exponencial de Fourier.
Ejemplo 1:
Obtener la transformada de Fourier del tren de pulsos que se muestra en la figura.
f(t)
t
A
-5d -2d -3d -d -d d d 3d 2d 5d
2 2 2 2 2 2
T La formulación con la serie de Fourier se obtuvo anteriormente como:
f(t)=
n
n
Fn ej ot

Análisis en el dominio transformado
150
donde los coeficientes de Fourier son Fn = ( Ad / T ) sinc ( n d / T ).
Por tanto, la transformada de Fourier es
f(t) = (2Ad / T)
n
n
sinc ( n d / T ) ( - n 0)
en donde 0 = 2 / T. La transformada de f(t) está formada por impulsos localizados
en = 0, 0 ,,... . . . Cada impulso tiene asociada un área igual al valor
( d / T) sinc ( n d / T ) , donde n es el número de la armónica.
Por otro lado, observemos que será posible escribir una relación entre los
coeficientes de la serie exponencial de Fourier de una señal periódica y la
transformada de Fourier del pulso correspondiente a un período.
Si transcribimos la ecuación (15) dtetfT
Ftjn
T
T
no
2/
2/
)(1
, y la comparamos con la
expresión de la T. de Fourier f(t),
dtetfF tj )()( , podemos fácilmente afirmar
que:
0 )( ntT
fT Fn F
Siendo
2/,0
2/),()(
Tt
TttftfT
Transformada de Fourier Seno y Transformada de Fourier Coseno
Definición
Sea f(t) causal. Entonces se definen dos nuevas transformadas:
Transformada de Fourier Coseno )()( cFtf cF
dtttfcF cos
0
)()(
;
y su fórmula de inversión:
0
cos)(2
)(
dtcFtf ; 0t
Transformada de Fourier Seno )()( sFtf sF
dtttfsF
0
sen)()( ;
Análisis en el dominio transformado
151
y su fórmula de inversión:
0
sen)(2
)(
dtsFtf ; 0t
Relaciones de interés
1) Relación de las T. de Fourier seno y coseno con la T. de Fourier para f(t) causal:
F() = Fc() - j Fs()
2) Relación de las T. de Fourier seno y coseno con la T. de Fourier para f(t) no causal,
par o impar:
2-a) Considere f(t) par, entonces, compruebe que: F() = 2 Fc()
2-b) Considere f(t) impar, entonces, compruebe que: F() =- 2 j Fs()
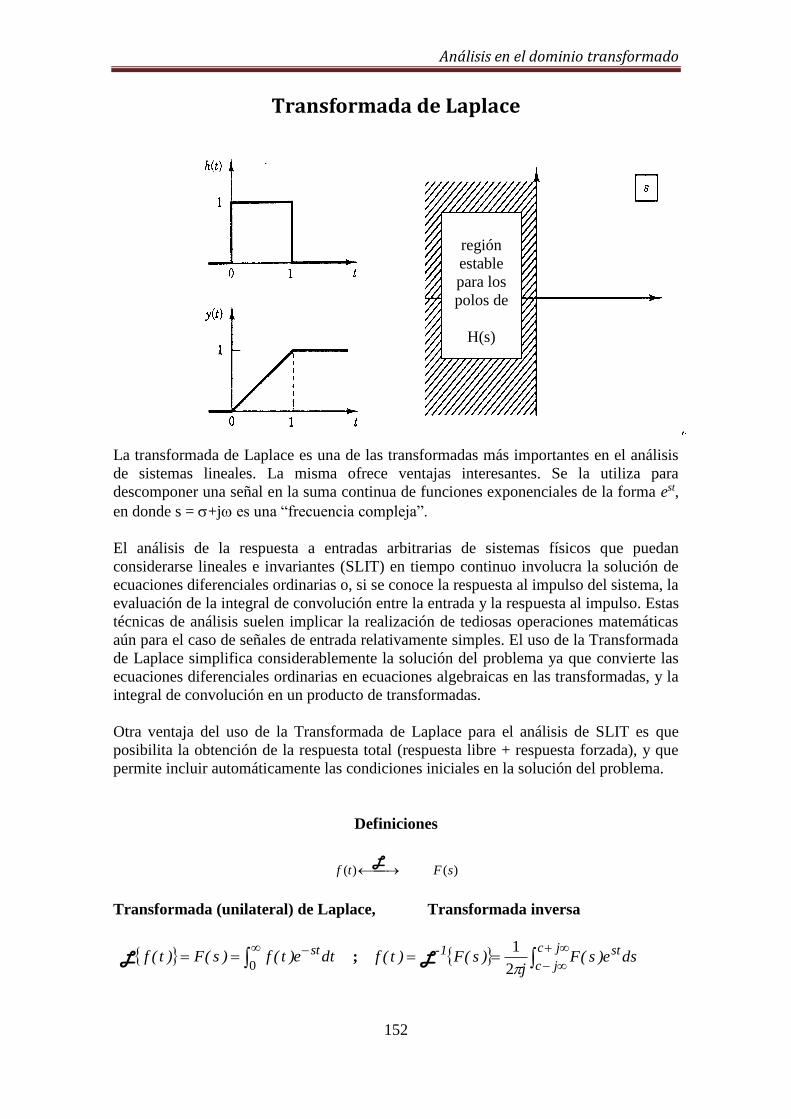
Análisis en el dominio transformado
152
Transformada de Laplace
La transformada de Laplace es una de las transformadas más importantes en el análisis
de sistemas lineales. La misma ofrece ventajas interesantes. Se la utiliza para
descomponer una señal en la suma continua de funciones exponenciales de la forma est,
en donde s = +j es una “frecuencia compleja”.
El análisis de la respuesta a entradas arbitrarias de sistemas físicos que puedan
considerarse lineales e invariantes (SLIT) en tiempo continuo involucra la solución de
ecuaciones diferenciales ordinarias o, si se conoce la respuesta al impulso del sistema, la
evaluación de la integral de convolución entre la entrada y la respuesta al impulso. Estas
técnicas de análisis suelen implicar la realización de tediosas operaciones matemáticas
aún para el caso de señales de entrada relativamente simples. El uso de la Transformada
de Laplace simplifica considerablemente la solución del problema ya que convierte las
ecuaciones diferenciales ordinarias en ecuaciones algebraicas en las transformadas, y la
integral de convolución en un producto de transformadas.
Otra ventaja del uso de la Transformada de Laplace para el análisis de SLIT es que
posibilita la obtención de la respuesta total (respuesta libre + respuesta forzada), y que
permite incluir automáticamente las condiciones iniciales en la solución del problema.
Definiciones
)()( sFtf L
Transformada (unilateral) de Laplace, Transformada inversa
0
dte)t(f)s(F)t(f stL ;
jc
jc
st1- dse)s(Fj
)s(F)t(f2
1 L
región
estable
para los
polos de
H(s)

Análisis en el dominio transformado
153
Transformada Unilateral de Laplace
Definición:
Sea f una función definida para la variable t real en (- , ), tal que f(t) =0 para t <
0 . La aplicación L que a cada función f le asigna la función
F s f t e dtst
( ) ( )
0
,
se llama Transformación de Laplace Unilateral, y se representa por L { f } = F(s)
“s” es el número complejo, s = +j, llamada frecuencia compleja.
= Re(s) se llama atenuación, y
= Im(s) se llama frecuencia
Notación: F(s) = R (,)+ j X(,)
F(s) es una función compleja de la variable compleja s, sus componentes real e
imaginaria las representaremos por R (, ) y X(,) respectivamente.
Región de Convergencia (RC)
La transformada de Laplace existe si la función f(t) es de orden exponencial, es decir, si
existe números reales M, y T para los cuales,
TtMetf t ,)( ,
condición que puede también escribirse como:
0)(lim
t
tetf
El mínimo valor de para el cual se verifica esta condición se denomina abscisa de
convergencia, c. Con esta condición, podrá afirmarse que la integral f t e dtst
( )
0
converge en la región
c)s(e ,
que se denomina Región de Convergencia (RC).
Se ve que la RC es un semiplano en s,
como se muestra en la figura
cc ,)s(e/Cs }
Luego, podríamos definir la R.C. como “el conjunto de valores de s para los cuales la
integral de la T. de Laplace puede ser evaluada”.
c
j
Región de
Convergencia.

Análisis en el dominio transformado
154
Condiciones suficientes para la existencia de la transformada de Laplace
Sea f una función definida en (- , ), tal que f(t) =0 para t < 0 y cumple que:
1. Es seccionalmente continua.
2. Es de orden exponencial “”,
entonces, existe el número llamado Transformada de Laplace: F(s)= f t e dtst
( )
0
, pues
f t e dtst
( )
0
es absolutamente convergente para Re(s) > c.
Observar:
1- f(t) / 0 t/tK)t(f es una función de orden exponencial cero. Por lo tanto,
sen(t) y cos(t) son funciones de orden exponencial cero.
2 - f te t
t
t
( ),
,
3
0
0 0 no es de orden exponencial, y por consiguiente, no tiene T. de
Laplace.
3 - f tt t
t( )
,
,
/
1 20
0 0 no es integrable en cada intervalo [0,T] y no cumple la
condición 1 del teorema de existencia y sin embargo tiene transformada de Laplace.
Calculo de la transformada de Laplace de algunas funciones especiales
Ejemplo 1: Función exponencial.
Sea f(t) = eat u(t), a R . Encuentre su transformada de Laplace y su Región de
Convergencia (RC). Encuentre también la expresión de las componentes real e
imaginaria.
)as(
elim)as()as(
edteee )as(t
t
)as(tstatat
1
11
00
L , si Re(s-
a)>0
pues, e-t(j+-a) = e-tj . e-t(-a) , donde se ve que el primer factor es siempre acotado.
Luego, Rta: F ss a
s a Ra
aX
a( ) , Re( ) ; ( , )
( ); ( , )
( )
1
2 2 2 2
Analice como se modifica el ejercicio anterior si a fuese imaginario; repita el
análisis para el caso de a complejo.
Ejemplo 2: función escalón unitario
Ejemplo 3: función impulso unitario

Análisis en el dominio transformado
155
Ejemplo 4: función rampa unitaria
f (t)=t us(t)
.dttet st
0
L
De la tabla de integrales: ),1( ueduue uu entonces tomando u= - st
)1
0(00)1(1
)(
1202
0
2 sue
sduue
s
uu
, pues
01
1111
1 uuuu
u
u elim
e
ulimuelim ( aplicando la regla de L’Hospital)
El par transformado resultas entonces : 2
1
st
Ejemplo 5: f (t)=t2
Rta: 3
2 2
s
!t L , para s>0 . Resulta de utilizar que
3
2 3
s
)(t
L
Relación entre la T. de Laplace unilateral y la T. de Fourier
Sea f(t) causal (f(t)=0, t<0) , entonces
dtetfedtetfdtetfdtetfsF jwtttjwstst )()()()()( )(
0
)t(fe)t(f tL
Propiedades de la T. de Laplace
1. Linealidad: Si f1(t) y f2(t) son funciones que admiten transformada de Laplace, y a
y b son constantes reales o complejas, entonces resulta que:
)t(fb)t(fa)t(bf)t(af 221 +1
LLL
y la región de convergencia es la intersección de las regiones de convergencia de cada
una de las T. de Laplace de f1(t) y de f2(t).
Demostración:
)t(fb)t(fadt)t(febdt)t(feadt)t(bf)t(afe)t(bf)t(af ststst212
0
1
0
21
0
21 + LLL

Análisis en el dominio transformado
156
Ejemplo 6: Hallar la T. de Laplace del cosh at
f t ate eat at
( ) cosh
2 atat eeatcosh LLL
2
1
2
1 y de acuerdo a
lo encontrado en el ejercicio 1 resulta:
asasatcosh
11
2
1L para Re(s)>a y Re(s)>-a, entonces Re(s)>a. En
conclusión: 22 as
satcosh
L para Re(s)>a
Ejemplo 7: funciones seno y coseno
2. Cambio de escala )f(aa
)at(fa
sF
1L solo para a>0
Demostración: ……………
3. Traslación en t
Sea f(t) una función con transformada de Laplace F(s) , y to una cte. positiva,
entonces: L
Demostración:
L
4. Traslación en s
Si )f()sRe(parasF)t(f L , entonces:
a)f()sRe(asFat )t(fe para L
Demostración:
por lo tanto: )t(fedtee)t(fdte)t(fasF atstatt)as( L
00)-(
5. Convolución en el tiempo
Si f(t) y g(t) son causales y )()()()(0 t
dxxtgxftgtf , entonces:
)( )()()( sGsFtgtf L ,
válida en al menos la intersección de las regiones de convergencia de F(s) y G(s).
Prueba: Sabemos que para todos los casos:
)()(0 dtetfsF st
dxxtgxftgtf )()()()(

Análisis en el dominio transformado
157
Cuando las funciones son causales, puede escribirse:
Si aplico la transformada de Laplace en el primer miembro de la ec. de arriba da:
:obtiene se ,desplazada señal una de Lapace de T. la es paréntesis del lo comoy
Ejemplo 8:
Verificar el T. de convolución para las funciones f(t)=e-atus(t) y g(t) =e-btus(t) con
0 < a < b .
Rta: 1
)bs)(as()t(g)t(f
L para Re(s) > -a
Ejemplo 9: Aplicando la propiedad anterior, calcular 21
11
)s)(s(
-L
Ejemplo 10: Verificar, a partir de las propiedades dadas que:
10-1. L )j(s
e t)j(
1
10-2. L
10-3. L
6. Diferenciación en el tiempo
Si f t F s( ) ( )
entonces f t sF s f'( ) ( ) ( ) 0
y en general se tiene que:
)0()0(')0()()( )1(21 nnnn
n
ffsfssFsdt
tfd
Comprobación:
dxsGexuxfdxxtgxuxf sx
ss )()()()()()( L
)()()()()( sGsFsGdxexuxf sx
s

Análisis en el dominio transformado
158
Por definición, dtedt
)t(df
dt
)t(df st
0
L
Integrando por partes, tal que u=e-st, será du= -se-stdt y f’(t)dt =dv, por lo que v=f(t)
Resulta:
)s(sF)(fe)t(fdte)t(fse)t(fdt
)t(df ststst
0
00
L
como F(s) existe, entonces tetf st en evaluada)( es cero. Por lo cual resulta
)(f)s(sF)t('f 0L
El caso general se obtiene aplicando en forma repetida el proceso anterior. Para la
derivada de 2do. Orden, es:
)('f)(sf)s(Fs)('f)](f)s(sF[s)('f)t('fs)t(''f 00000 2 LL
Esta propiedad de la T. unilateral de Laplace proporciona un método muy conveniente
para resolver problemas de transitorios en sistemas lineales. Las condiciones iniciales de
un sistema se incorporan con facilidad a las soluciones.
Debe recalcarse que si en t=0 f(t) y sus derivadas no fuesen continuas, entonces la
propiedad de derivación vale, evaluando las condiciones iniciales en 0+
Ejemplo: Verificar que la T. de Laplace de f’(t), donde f(t) = e-at u(t) , para f(0)=0, y
para f(0) =1, es as
s
y
as
a
respectivamente.
7. Integración en el tiempo
Si f t F s( ) ( )
entonces f x dxF s
s
t
( )( )
0
y además: f x dxF s
s
f
s
t
( )( ) (
( )
0)
1
, donde
f f x dx(( )
( )0)1
0
Comprobación:
1) Por definición, dtedx)x(fdx)x(f sttt
0 00
L
Integrando por partes, con: u f x dx dv e dtt
st ( )0
y , y por consiguiente:
stes
vdttfdu 1
y )(
dte)t(fs
dx)x(fs
edx)x(f st
tstt
0000
1L

Análisis en el dominio transformado
159
= -[ 0 – 0 ]+ 1/s F(s) (1)
El primer término de la expresión (1) es cero porque, para Re(s)>0, la exponencial es
cero en el límite superior, ya que t
duuf
0
)( puede probarse que es también una función
de orden exponencial . En el límite inferior la integral es cero.
En conclusión:
s
)s(Fdu)u(f
t
0
L
en al menos la región dada por la intersección entre la RC de F(s) y {Real(s)>0}
2) Veamos que modificaciones ocurren cuando se quiere encontrar la Transf. de f u dut
( )
.
Se puede escribir:
tt
duufduufduuf
0
0
)()()( , t 0
Aplico T. de Laplace a ambos miembros:
s
)s(F
s
fdu)u(fdtefdu)u(ffdu)u(f
)()(
tst)(
)(
t)(
)(
t
10
00
10
0
10
LLLL
(2)
La R.C. es claramente la intersección de las dos regiones correspondientes a cada
uno de los términos en el último miembro de la ec.(2): Re(s)>0 que es la RC de
s
f)1(
)0(
y Re(s)>a Re(s)>0 es la RC de F s
s
( ).
Ejemplo de aplicación: Encuentre la corriente que se establece en un circuito RLC, si
en t=0 la carga del capacitor es q0 , la corriente en la bobina i0 y la tensión que se aplica
V(t) .
8. Diferenciación en frecuencia
Sea f(t) una función tal que atk etft )()( es absolutamente integrable para k=0,1,…n
; para a en la región de convergencia de F(s) . Entonces:
k
kk
ds
)s(Fd)t(f)t( L con RC igual a la de F(s)
Ejemplo 11: Hallar la transformada de Laplace de f(t) = t eat u(t) .
llamemos g(t) = eat us(t)
G ss a
( )1
, s>a (a R) .
Luego:
2
21 11
)as()as)(()as(
ds
d
ds
)s(dG)t(tg)t(ute)t(f at
LLL si
Re(s)>a

Análisis en el dominio transformado
160
Analiticidad de F(s)
Si e t f t ( ) es absolutamente integrable, la transformada de Laplace F(s) = L f(t)
con t 0 , es analítica para Re{s} > y lims
F s
( ) 0 para Re(s) .
" F(s) es analítica en su región de convergencia ".
Los teoremas del Valor Inicial y del Valor final permiten, determinar los valores de
f(t=0+) y f(t) a partir de F(s) , sin necesidad de volver al dominio temporal .
Teorema del Valor Inicial
Sea f(t) una función que admite transformada de Laplace, y existen el limt o
f t
( ) y
lims
sF s
( ) .
Entonces: lims
sF s
( ) limt o
f t f o
( ) ( )
Demostración
La propiedad de diferenciación en el tiempo establece:
)(f)s(sFdtste)t('f)t('f 0
0
L
Se aplica límite en esta igualdad, y entonces,
lim lims s
f t e stdt sF s f
'( ) ( ) ( )
0
0 ( A )
0
lims
sF s f( ) ( )0
lims
sF s f( ) ( )0
La demostración anterior es estrictamente cierta siempre que f(t) sea continua en el
origen, y por lo tanto f '(t) sea finito.
Sin embargo la demostración se modifica cuando f(t) es discontinua en el origen, y en
la expresión aparece f(0+) en vez de f(0), tanto si se considera la expresión de la
transformada de la derivada que tiene en cuenta el límite izquierdo o la que tiene en
cuenta el límite derecho. Entonces la ecuación debe escribirse:
lims
sF s f
( ) ( )0
La demostración rigurosa se desarrolla mas abajo. Analicemos todo esto en un ejemplo
sencillo:
Ejemplo 12:
Verificar el T. del valor inicial para f(t) = 3 e -2t us(t).

Análisis en el dominio transformado
161
Demostración
Si f(t) es discontinua en el origen, entonces f ' (t) contiene un impulso de peso
[f(0+)-f(0-)] , es decir , en el origen es f ' (t) =[f(0+)-f(0-)](t). Se debe entonces saber
como considerar el límite inferior en la integral si en 0+ o en 0-.
a) Si en la relación A se considera 0- resulta:
dtstetfdttsteffdtstetfsslimlim
0
)('
0
0
)()]0()0([
0
)('
0)0()0()]0()([
fffssFslim
Luego: lims
sF s f
( ) ( )0
b) Ahora, si se considera 0+ en la relación (A) tendremos:
lim = lims s
f t e stdt sF s f
'( ) ( ) ( )][
0
0 0 , entonces
lims
sF s f
( ) ( )0
Conclusión:
Si f(t) es discontinua en t=0, entonces el límite )(ssFslim
da el valor de f(0+) siempre.
Teorema del Valor Final
Sean f(t) y f '(t) funciones que admiten transformada de Laplace, y existen )(lim tft
y
lim ss o
F s
( ) , entonces,
limt
f t
( ) = lim ss o
F s
( )
Demostración:
Se sabe que: )(f)s(sF)t('f 0L .
Si se encuentra el valor del límite para s tendiendo a cero en los dos miembros de la
igualdad anterior resulta:
)]0()([0
lim
0
)('0
lim fssFs
dtstetfs
)]0()([0
limlim
0
)(' )0()( fssFst
dttf ftf
)(0
limlim )( ssFst
tf
Ejemplo 13: Obtener el valor final de la función en el tiempo, si su transformada
unilateral es F ss a
a( ) ,
1
0, >-a ; Rta: 0 . ( f(t) = e -at us(t))
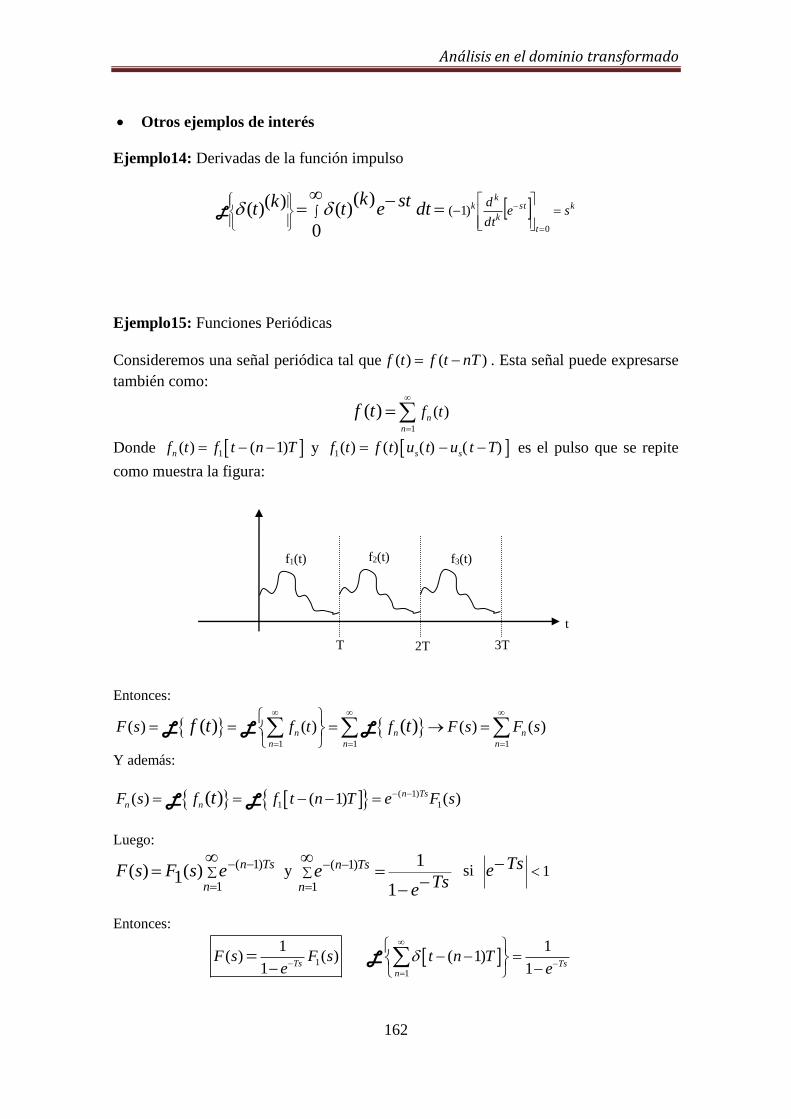
Análisis en el dominio transformado
162
Otros ejemplos de interés
Ejemplo14: Derivadas de la función impulso
k
t
st
k
kk se
dt
ddtste
ktkt
0
)1(
0
)()()()( L
Ejemplo15: Funciones Periódicas
Consideremos una señal periódica tal que ( ) ( )f t f t nT . Esta señal puede expresarse
también como:
1
( )( ) n
n
f tf t
Donde 1( ) ( 1)nf t f t n T y 1( ) ( ) ( ) ( )s sf t f t u t u t T es el pulso que se repite
como muestra la figura:
Entonces:
1 1 1
( ) ( ) ( ) ( )( ) ( )n n n
n n n
F s f t f F s F sf t t
L L L
Y además:
( 1)
1 1( ) ( 1) ( )( ) n Ts
n nF s f f t n T e F st L L
Luego:
1
)1()(1)(n
TsnesFsF y Tse
en
Tsn
1
1
1
)1( si 1Tse
Entonces:
1
1( ) ( )
1 TsF s F s
e
1
1( 1)
1 Tsn
t n Te
L
T 2T 3T
f1(t) f2(t) f3(t)
t
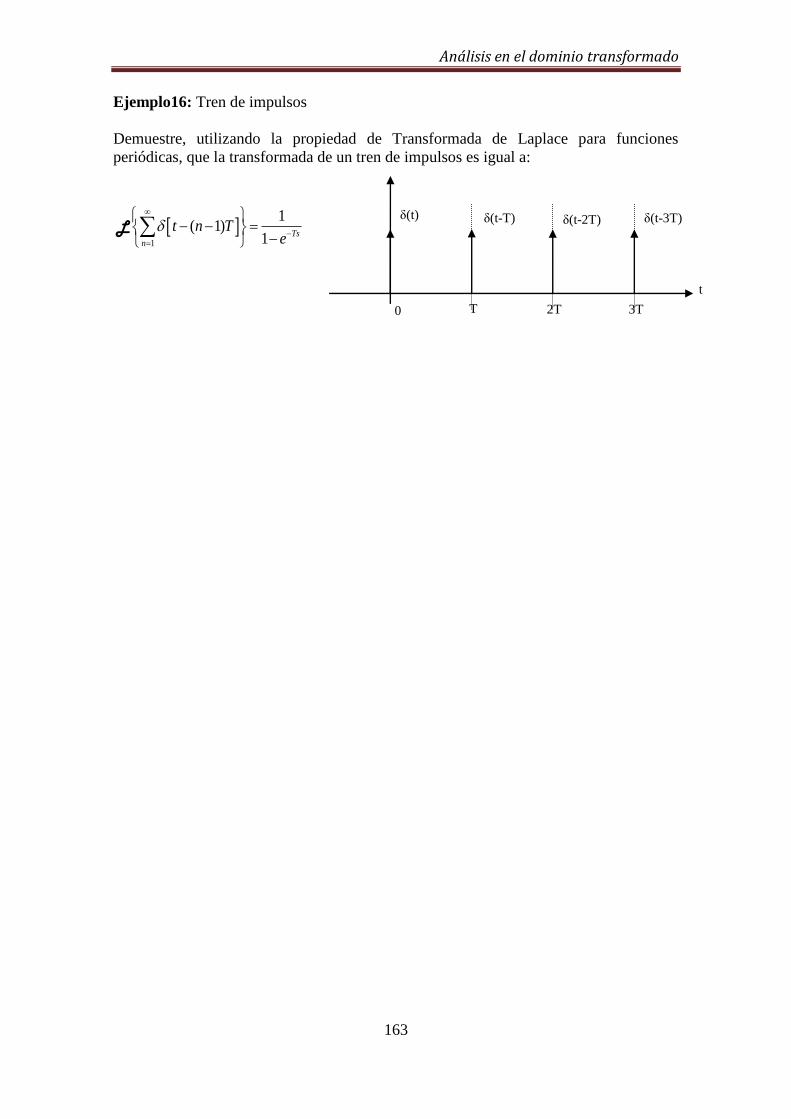
Análisis en el dominio transformado
163
Ejemplo16: Tren de impulsos
Demuestre, utilizando la propiedad de Transformada de Laplace para funciones
periódicas, que la transformada de un tren de impulsos es igual a:
1
1( 1)
1 Tsn
t n Te
L
δ(t) δ(t-3T) δ(t-T) δ(t-2T)
T 3T
t
2T 0
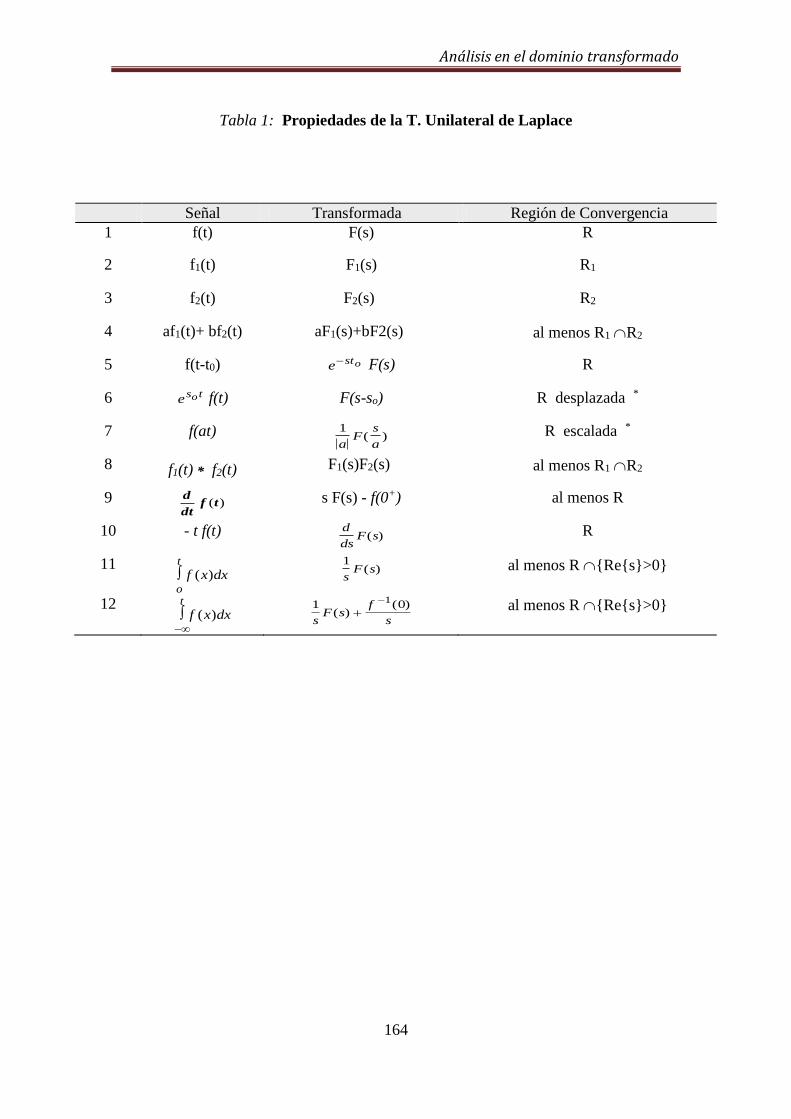
Análisis en el dominio transformado
164
Tabla 1: Propiedades de la T. Unilateral de Laplace
Señal Transformada Región de Convergencia
1 f(t)
F(s) R
2 f1(t) F1(s) R1
3 f2(t) F2(s) R2
4 af1(t)+ bf2(t) aF1(s)+bF2(s) al menos R1 R2
5 f(t-t0) e sto F(s) R
6 es to f(t) F(s-so) R desplazada *
7 f(at) 1
aF
s
a( ) R escalada *
8 f1(t) * f2(t) F1(s)F2(s) al menos R1 R2
9 )(tfdt
d s F(s) - f(0+) al menos R
10 - t f(t) d
dsF s( ) R
11 f x dx
o
t
( ) 1
sF s( ) al menos R {Re{s}>0}
12 f x dx
t
( )
1 01
sF s
f
s( )
( )
al menos R {Re{s}>0}
Análisis en el dominio transformado
165
Transformada Inversa de Laplace
Fórmula de inversión
Sea f(t) una función causal, la fórmula de inversión es:
jc
jc
st1- dsesFj
sFtf )(2
1)()(
L (2)
La Transformada de Laplace es una operación matemática que permite expresar
prácticamente cualquier señal continua en el tiempo, mediante una suma de
exponenciales complejos de la forma K est. De la fórmula de inversión se ve que el
contorno de integración es una línea recta paralela al eje j para todo valor c dentro de
la región de convergencia de la transformada.
Métodos para calcular la T. inversa de Laplace
a) Fórmula de Inversión compleja
b) Descomposición en suma de fracciones simples
c) Fórmula del desarrollo de Heaviside
d) Inversión para señales periódicas
a) Fórmula de Inversión compleja
Puede demostrarse que la integral de línea a lo largo de la línea =c
es igual a la integral a lo largo de la curva cerrada C como la graficada,
en sentido anti-horario.
Esta integral, en virtud del teorema de los residuos, será igual a :
])([Re)(
1
stn
kss
esFstfk
, donde sk con k=1, . . . n son los polos de F(s)est en Re(s)<c .
Raramente usaremos esta expresión para calcular en la práctica una transformada
inversa. Generalmente el procedimiento que se utilizará consistirá en manipular la
expresión de la transformada dada, hasta obtener formas de transformadas que aparecen
en la tabla. b) Descomposición en suma de fracciones simples
Este método se aplica para transformadas que son funciones racionales en s , es decir
razones de polinomios en s , cuya forma general sería:
nno
mmo
sbsbsbb
sasasaasF
2
21
221)(
Se supone m<n . Si éste no es el caso, F(s) siempre se puede escribir como la suma de
un polinomio de grado m-n más una razón de polinomios con un numerador un grado
menor que el grado del denominador.
j
C c

Análisis en el dominio transformado
166
Las funciones racionales se pueden expresar como suma de fracciones más simples para
las cuales se tiene tabulada su transformada inversa.
Para obtener el desarrollo en fracciones simples deben obtenerse los polos de F(s).
b-1) Si los polos son no repetidos, se expresa:
)()()()())(()(
2
2
1
1
21
221
n
n
nn
mmo
ps
c
ps
c
ps
c
pspspsb
sasasaasF
(3)
y los coeficientes se pueden obtener como:
ipsii sFpsc
)()(
b-2) Si los polos son múltiples, la ecuación (3) debe incluir , para el polo múltiple,
tantos términos como la multiplicidad del polo. Por ejemplo, si el polo pi tiene
multiplicidad r se incluyen los términos:
ri
ri
i
i
i
i
ps
c
ps
c
ps
c
)()()( 2
21
donde, ips
riri sFpsc
)()( ;
ips
riri sFps
ds
dc
)()(1
;
ips
rik
k
kri sFpsds
d
kc
)()(!
1 ;
ips
rir
r
i sFpsds
d
rc
)()()!1(
1
1
1
1
b-1) y b-2) son válidos también para raíces complejas. Sin embargo, se puede
mencionar un tercer caso.
b-3) Si f(t) es real, entonces las raíces complejas del denominador de F(s) se presentan
como pares conjugados. Se pueden expresar esas dos raíces como un solo factor, con
diferentes formas. Dos de estas formas aparecen en el tercer y cuarto miembro de la
siguiente igualdad.
2221
221
)()(
)()(
s
DsD
bass
DsD
sB
sAsF
Las constantes D1 y D2 , se obtienen generalmente resolviendo un sistema de 2 ecuaciones.
Ejemplo 17: Demuestre que si f(t) es causal y su T. de Laplace es
463
3)(
23
sss
ssF entonces,
Ejemplo 18: Demuestre que si f(t) es causal y su T. de Laplace es
3
2
)3)(1(
332)(
ss
sssF entonces,
Análisis en el dominio transformado
167
c) Fórmula del desarrollo de Heaviside
Sean P(s) y Q(s) polinomios tales que grado P(s)<grado Q(s), y Q(s) solo con raíces
simples, entonces, la transformada inversa de Laplace unilateral de la función
)(
)()(
sQ
sPsF es
tpn
k k
k ke)p('Q
)p(P)}s(F{
1
1L donde pk son las raíces simples de
Q(s).
Ejemplo 19: Verificar el resultado obtenido para el Ejemplo 16, aplicando la fórmula
de Heaviside
d) Inversión para señales periódicas
Suponga que la T. de Laplace de f(t) está dada por )1(
1)(
10
5
s
s
es
esF
De la forma del denominador se deduce que f(t) es periódica de período T0=10. Para
verlo más claramente se rescribe:
)1(
1)()(
101 sesFsF
,
donde )1(1
)( 51
ses
sF f1(t) = us(t)-us(t-5), que es un pulso rectangular de
ancho 5 y altura 1.
Por consiguiente, f(t) será periódica de período 10, con valor 1 para
nT<t<nT+5, y valor 0 para todo otro t siendo n=1,2, . . .
lo que queda también expresado como:
0
1 )()(
n
nTtftf
Resolución de ecuaciones diferenciales con la transformada de Laplace
Las ecuaciones diferenciales lineales ordinarias con coeficientes constantes pueden
reducirse a ecuaciones algebraicas de la transformada.
Sea la ecuación: y t ay t r t' '( ) ( ) ( )
donde se conocen a y r(t) . Si se aplica la transformada de Laplace en ambos
miembros de la ecuación: )t(r)t(ya)t(''y LLL
y aplicando las propiedades:
s Y s sy y aY s R s2 0 0( ) ( ) '( ) ( ) ( )
despejando: Y ssy y
s a
R s
s a( )
( ) ' ( ) ( )
0 0
2 2
Análisis en el dominio transformado
168
Finalmente, la solución se halla antitransformando:
)s(Yty -1= )( L
Ejemplo: Resolver la ecuación
y t y t y t e y yt' ' ( ) ' ( ) ( ) ( ) ; ' ( ) ; 2 1 0 1 0 0 con
Rta: y t t e t( ) 1
212 , t ≥0
Aplicación a sistemas lineales. Función de Transferencia
En forma análoga a lo que se hizo con T. de Fourier, se puede trabajar con el caso más
general de la T. de Laplace. Consideremos un LTI cuya entrada es una señal genérica
x(t) , y su respuesta una señal y(t). Si se aplica la T. de Laplace a la ecuación
diferencial ordinaria que modela el sistema, y considerando que el sistema tiene
condiciones iniciales nulas, por todo lo ya visto sabemos que se obtendrá una igualdad,
en el dominio transformado dada por:
a s Y s a sY s a Y s b s X s b sX s b X snn
mm( ) ( ) ( ) ( ) ( ) ( ) 1 0 1 0
Utilizando la forma operacional para el polinomio en s, se puede escribir:
A s Y s B s X s Y sB s
A sX s H s X sn m
m
n( ) ( ) ( ) ( ) ( )
( )
( )( ) ( ) ( ) (4)
donde, H sY s
X s( )
( )
( ) es la Función de Transferencia del sistema, que es una función
racional que representa la relación entrada-salida en el dominio s , obtenida cuando el
sistema tiene condiciones iniciales nulas.
Si la entrada que se aplica al sistema es de la forma x t es to( ) , la salida será :
y t H s eos to( ) ( ) . La demostración es totalmente análoga a la hecha para las funciones
x t e j to( ) , caso que está incluido en el anterior, ya que son equivalentes en o=0 .
Como todo esto es cierto para todo s del plano complejo, la relación entrada-salida
para este tipo de entradas se puede representar esquemáticamente como:
x(t)= est h(t) y(t)= H(s) est
Además, la función de transferencia se puede encontrar haciendo la T. de Laplace de la
respuesta al impulso del sistema, y entonces , para el caso de sistemas causales será:
)t(h)s(H L , para Re(s)> (f) (5)
Demostración : Si la entrada es un impulso, entonces su T. de Laplace es X(s)=1 .Por lo
tanto, de acuerdo a la ec.(4) la salida en el dominio frecuencial será: Y(s)=H(s).1=H(s)

Análisis en el dominio transformado
169
. Entonces, como la respuesta al impulso en el dominio temporal es y(t)=h(t), resulta
que )t(h)s(H L .
Función de transferencia de sistemas en serie, en paralelo y retroalimentado
Relación entre la respuesta en frecuencia y la T. de Laplace de un SLIT
Considere un LTI causal con respuesta al impulso h(t) . Es fácil verificar que la relación
entre la función del sistema y la función de transferencia está dada por:
jssHH
)()(
Esto es posible solo si el SLI es estable.
Analice las razones de la afirmación anterior. Para ello puede considerar el caso
particular de un sistema de los llamados “integrador puro”.
Observar que la relación anterior se cumple para toda señal, no solamente para h(t).
Luego, para una señal cualquiera x(t) podrá afirmarse que :
jssXX
)()(
solo si x(t) es absolutamente integrable.
Respuesta transitoria y de estado estacionario
Los conceptos de respuesta transitoria y respuesta permanente o estacionaria, estudiados
en el dominio del tiempo, también se pueden ilustrar en el dominio de la frecuencia.
Supongamos que se aplica x(t) a un sistema cuya respuesta al impulso es h(t).
Consideramos que sus transformadas están dadas por.
))....()((
)(
)(
)()(
21
1
1
1
npspsps
sA
sB
sAsH
))....()((
)(
)(
)()(
21
2
2
2
mqsqsqs
sA
sB
sAsX
Se sabe que la salida del sistema, con condiciones iniciales nulas, en el dominio
transformado es:
))....()(())....()((
)()()(
2121
21
mm qsqsqspspsps
sAsAsY
H1
H1 H2 + +
H2 _
Análisis en el dominio transformado
170
Desarrollando en fracciones simples
)()()()()(
1
1
1
1
m
m
n
n
qs
k
qs
k
ps
c
ps
csY
y la transformada inversa:
II
m
i
tqi
I
n
i
tpi
ii ekecty
11
)(
representa la salida del sistema en el dominio temporal, para una entrada x(t), con
condiciones iniciales nulas; es la que llamamos respuesta forzada. Cada término de esta
sumatoria es un “modo” del sistema.
La sumatoria I es la componente transitoria de la respuesta forzada. Los términos se
obtienen de las singularidades de H(s) y en general, los coeficientes ci dependen de H(s)
y X(s) .
La sumatoria II es la parte de estado estacionario de la respuesta y(t). Estos términos se
deben a las singularidades de X(s) .
Cuando el sistema tiene condiciones iniciales no nulas, como se sabe, la respuesta
transitoria tendrá otra componente que dependerá de las mismas.
Estabilidad
Definición de Sistema estable: entradas acotadas producen salidas acotadas. (BIBO).
Hay diferentes formas de asegurar la estabilidad en este sentido:
1- Con respecto a su Región de convergencia:
Diremos que un sistema es estable si y solo si el eje imaginario (=0) está contenido en
la región de convergencia de H(s)
2- Con respecto a su ecuación característica:
Para sistemas causales, también puede definirse su estabilidad con el siguiente criterio:
Todos los polos de H(s) están en el semiplano izquierdo de s.
3- Con respecto a su respuesta al impulso:
Si
dtth )( , entonces el sistema es estable
Por otro lado, el requerimiento de que el grado del polinomio del denominador de H(s)
es mayor o igual al grado del polinomio del numerador, está relacionado con la
causalidad del sistema.
Justificación
Observe la forma que se usó para descomponer la salida del sistema en dos sumatorias,
en el punto anterior. En los sistemas estables, los términos de la suma I tienden a cero
cuando se incrementa t , mientras que los de la sumatoria II pueden contener términos
que son distintos de cero indefinidamente. Esta parte, contiene los polos de la entrada.
Por lo tanto, si la entrada es acotada, esta parte también lo será.
Por consiguiente, la salida será no-acotada si al menos uno de los términos de la
respuesta natural (ciepit ) se hace no-acotado. Esto ocurre solamente si la parte real de al
menos 1 polo pi es positivo o cero.
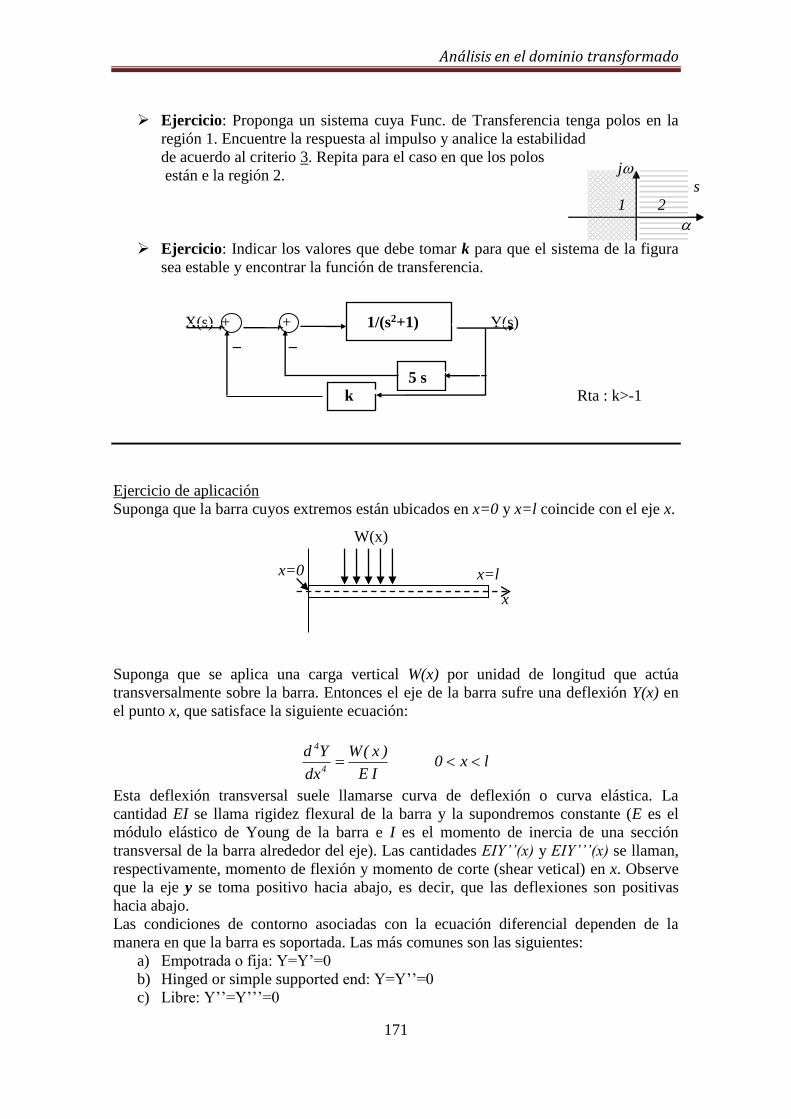
Análisis en el dominio transformado
171
Ejercicio: Proponga un sistema cuya Func. de Transferencia tenga polos en la
región 1. Encuentre la respuesta al impulso y analice la estabilidad
de acuerdo al criterio 3. Repita para el caso en que los polos
están e la región 2.
Ejercicio: Indicar los valores que debe tomar k para que el sistema de la figura
sea estable y encontrar la función de transferencia.
X(s) + + 1/(s2+1) Y(s)
_ _
5 s
k Rta : k>-1
Ejercicio de aplicación
Suponga que la barra cuyos extremos están ubicados en x=0 y x=l coincide con el eje x.
Suponga que se aplica una carga vertical W(x) por unidad de longitud que actúa
transversalmente sobre la barra. Entonces el eje de la barra sufre una deflexión Y(x) en
el punto x, que satisface la siguiente ecuación:
lx0IE
)x(W
dx
Yd4
4
Esta deflexión transversal suele llamarse curva de deflexión o curva elástica. La
cantidad EI se llama rigidez flexural de la barra y la supondremos constante (E es el
módulo elástico de Young de la barra e I es el momento de inercia de una sección
transversal de la barra alrededor del eje). Las cantidades EIY’’(x) y EIY’’’(x) se llaman,
respectivamente, momento de flexión y momento de corte (shear vetical) en x. Observe
que la eje y se toma positivo hacia abajo, es decir, que las deflexiones son positivas
hacia abajo.
Las condiciones de contorno asociadas con la ecuación diferencial dependen de la
manera en que la barra es soportada. Las más comunes son las siguientes:
a) Empotrada o fija: Y=Y’=0
b) Hinged or simple supported end: Y=Y’’=0
c) Libre: Y’’=Y’’’=0
j s
1 2
x
x=0 x=l
W(x)

Análisis en el dominio transformado
172
Análisis del modelo en Variables de Estado con la transformada de Laplace
Es posible transformar la ecuación de los estados y luego antitransformar, con el mismo
criterio que se utiliza cuando se resuelve una ecuación diferencial mediante la T. de
Laplace.
Entonces, para : x(t) Ax(t) B ( )
y(t) Cx(t) ( )
u t
Du t ,
Podemos desarrollar, por ejemplo, las dos primeras filas de la ecuación matricial y
obtenemos:
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
x t a x t a x t a x t b u t b u t b u t
x t a x t a x t a x t b u t b u t b u t
n n r r
n n r r
1 11 1 12 2 1 11 1 12 2 1
2 21 1 22 2 2 21 1 22 2 2
donde aij y bij son los elementos de las matrices A y B respectivamente.
Ahora, aplicando la T. de Laplace en ambos miembros de las dos ecuaciones resulta:
sX s x a X s a X s a X s b U s b U s b U s
sX s x a X s a X s a X s b U s b U s b U s
n n r r
n n r r
1 1 11 1 12 2 1 11 1 12 2 1
2 2 21 1 22 2 2 21 1 22 2 2
0
0
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
el resto de las ecuaciones mantiene la misma estructura, y por lo tanto la transformada
de todas las ecuaciones también se puede escribir en forma matricial:
s s s sX x AX BU( ) ( ) ( ) ( ) 0
reordenando y trabajando algebraicamente s s s sX AX x BU( ) ( ) ( ) ( ) 0
s s s s s sIX AX I A X x BU( ) ( ) ( ) ( ) ( ) ( ) 0 .
Ahora se puede despejar la T. de Laplace de la matriz de estados:
X I A x I A BU( ) ( ) ( ) ( ) ( )s s s s 1 10 (18)
El vector de estados x(t) es la T. inversa de Laplace de esta ecuación.
Ejercicio 20:
Considere el LTI con una entrada y una salida, cuya ecuación de transferencia está
dada por: H sY s
U s
s
s s( )
( )
( )
5 4
3 22 .
a) Halle a partir de la función de transferencia primero la ecuación diferencial y
encuentre el diagrama en bloques.
b) Halle las ecuaciones de los estados para el modelo conocido como la 2da. Forma
canónica.

Análisis en el dominio transformado
173
c) Expréselo en el dominio transformado y obtenga un diagrama en bloques
utilizando bloques “1/s”.
Matriz de transición de los estados
Llamemos matriz de transición de los estados en el dominio transformado a
1)s()s( AI .
La ya definida matriz de transición de los estados, (t) , podrá entonces calcularse
como:
})s{()}s({)t( 11-1- AILL (19)
Se llama matriz de transición ya que determina la evolución de los estados, es decir,
permite encontrar los estados de un LTI en un tiempo t a partir del conocimiento de los
mismo en un tiempo t0, considerando entrada nula en el sistema, como se ve claramente
en la solución no forzada representada por:
)()( 00 tttt )x(x . (20)
o bien, para t0=0, )0()( )x(x tt .
La solución temporal de los estados se halla antitransformando la ecuación (18),
recordando que la T. inversa de la matriz se calcula como la T. inversa de cada uno de
sus elementos. Hay dos formas de realizar esta antitransformada:
1) Se trabaja algebraicamente el 2do. término de la (18) en la variable s , y después se
antitransforma, resultando:
)}s()s{()Φ(t)x(x(t) BUAI11-0 L , (21)
o bien,
2) se antitransforma considerando que el producto en la variable s del segundo
término de la ec. (18) resulta en una integral de convolución en la variable t , y
entonces se puede escribir:
ττBuτxx d)()t()0()t()t(t
0
(22)
Ejercicio 21: Reconsidere el sistema dado en el Ejercicio 20.
a) Halle las matrices (s), (t).
b) Halle la salida del sistema a partir de lo hallado en el inciso a), si considera que la
entrada del mismo es un escalón unitario.
Rta:a)
b) y(t) = 2 + [-2 x1(0)-x2(0) +1]e-t+[6x1(0)+6x2(0)-3]e-2t, t≥0

Análisis en el dominio transformado
174
Relación con la Función de Transferencia
La transformación de las ecuaciones de estado (7-a) y (7-b), da para condiciones
iniciales nulas: s s s sX AX BU( ) ( ) ( )
Y CX DU( ) ( ) ( )s s s
Despejando y relacionando estas ecuaciones
X I A BU( ) ( ) ( )s s s 1 , y entonces Y C I A B D U( ) [ ( ) ] ( )s s s 1
Recordando que la función de transferencia es el cociente entre la T. de Laplace de
entrada y salida, para condiciones iniciales nulas, resulta, para el caso de sistemas de
una entrada-una salida:
DsDss
ssH
BCBAICU
Y)()(
)(
)()( 1
Estabilidad
Un LTI es estable (entrada acotada-salida acotada) cuando los polos de la función de
transferencia H(s) están en el semiplano izquierdo.
Como:
C I A B CI A
I AB( )
( )
( )s
s
s
1 adj
det
el polinomio del denominador es el determinante de (s I - A). Luego, los polos de la
función de transferencia son las raíces de la ecuación característica del sistema, dada
por:
det(s I - A) = 0
En conclusión, un LTI es estable si las raíces de la ecuación característica están en el
semiplano izquierdo del plano s . Esto es equivalente a decir que:
un LTI es estable si los autovalores de la matriz de estados tienen parte real negativa
Ejercicio 22:
Analice la estabilidad a partir de la matriz A para el modelo obtenido en el Ejercicio 20.

Análisis en el dominio transformado
175
TRANSFORMACIÓN DE SEMEJANZA
El modelo de variables de estado de un mismo LTI no es único, sino que por el
contrario, un LTI tiene un número ilimitado de modelos de estado.
Transformaciones
Se considera el caso de sistemas de una entrada-una salida
Puede demostrarse que hay un ilimitado número de matrices A, B, C y de escalares D
que se relacionan por: x(t) Ax(t) B ( )
y(t) Cx(t) ( )
u t
Du t
Considere un nuevo vector de funciones v(t), también de dimensión n, que se representa
como una combinación lineal de los elementos del vector de estados x(t) .
)()()()(
)()()()(
)()()()(
2211
22221212
12121111
txqtxqtxqtv
txqtxqtxqtv
txqtxqtxqtv
nnnnnn
nn
nn
En forma matricial esta ecuación puede escribirse como
v(t)=Qx(t)=P-1x(t)
x(t)=P v(t) donde P es llamada matriz de transformación .
Sustituyendo (30) en (28) da :
)(CPv(t)y(t)
)(BAPv(t)(t)vP
tDu
tu
y rescribiendo:
)(v(t)Cy(t)
)(Bv(t)A(t)v
tuD
tu
vv
vv
donde: Av=P-1AP , Bv=P-1B , Cv=CP , Dv=D
Esta transformación se llama de semejanza pues si bien la estructura interna del
modelo se modifica, la relación entrada-salida no.
Esto se prueba en la cuarta de las propiedades que se detallan más adelante.
Propiedades de las matrices de estados para los modelos resultantes de
aplicar transformaciones de semejanza.
1) det (sI-Av) = det (sI-A)
Lo que implica que los autovalores del sistema y el sistema transformado
son los mismos.
Dem: . . . . . . .
2) det Av = det A (= 1 2 . . . n)

Análisis en el dominio transformado
176
3) tr Av = tr A (= 1 +2 +. . . +n)
4) H ss
ss D s Dv v v v( )
( )
( )( ) ( ) Y
UC I A B C I A B
1 1
Demostración: . . . . . . .
Ejemplo
Para el mismo sistema lineal de segundo orden considerado en el Ej. 20, suponga la
transformación dada por: v t x t x t
v t x t x t
1 1 2
2 1 22
( ) ( ) ( )
( ) ( ) ( )
Halle:
a) las matrices P y Q
b) las ecuaciones de estado transformadas
c) la función de transferencia del sistema
d) verifique las propiedades enunciadas
Transformación de los autovalores
Si A tiene n autovalores distintos, entonces puede diagonalizarse usando la
transformación
=P-1AP siendo P una matriz cuyas columnas son los autovectores de la matriz A, resultando la
matriz como una matriz diagonal cuyos elementos son los autovalores de A.
Prueba: para cada autovalor puede escribirse la ecuación
A.x1= 1.x1
A.x2= 2.x2
A.xn= n.xn
donde por ejemplo, x1 es el autovector correspondiente al autovalor 1 .
A partir de las definiciones de las matrices hechas mas arriba, este sistema de n
ecuaciones matriciales puede escribirse en forma mas compacta como:
AP =P.
resultando entonces: =P-1 A P
Luego, si se elije para la Transformación de Semejanza, la matriz formada por los
autovectores, se obtendrá un modelo en variables de estado, con una matriz de estados
Av =, diagonal, cuyos elementos son los autovalores del sistema.
Ejercicio 24: Encuentre el modelo de variables de estado semejante al
encontrado ya en el Ejercicio 20, realizando la transformación por los
autovectores.

Apéndice
177
ApéndiceS

Apéndice
178
Variable Compleja
NÚMERO COMPLEJO: z=x+jy
FORMA POLAR DE UN COMPLEJO:
je.rz donde
22 yxzr y x
ytgarc
El argumento de z admite múltiples valores, pero el valor: se denomina
valor principal del argumento.
EXTRACCIÓN DE RAÍCES:
n
k2.j
e.n1
rn1
z , k = 0,1,2,……,n-1 y es el argumento de z
DESIGUALDADES TRIANGULARES:
a) 2121 zzzz b) 2121 zzzz
FUNCIÓN DERIVABLE EN UN PUNTO: Sea f(z)=u(x,y)+j v(x,y)
Condiciones de Cauchy-Riemann: yuxv;yvxu
a) Condiciones necesarias:
Si una función es derivable en un punto 00 y,x , entonces se cumplen las condiciones
de C-R
b) Condiciones suficientes:
Sean u y v funciones reales uniformes de x e y, las cuales junto con sus derivadas
parciales de primer orden son continuas en un punto 00 y,x . Si estas derivadas
parciales satisfacen las condiciones de C-R en aquel punto, entonces la derivada f '(z0),
existe.
FUNCIONES ANALÍTICAS:
La función w = f(z) es analítica en un punto dado z0 D si la misma es derivable tanto
en el propio punto z0 como en un cierto entorno del mismo.
Las condiciones de C-R son necesarias pero no suficientes.
Apéndice
179
FUNCIONES ELEMENTALES
a) Función exponencial : w = ez
*Es una función entera, es decir analítica en todo el plano complejo.
*No se anula para ningún valor de z.
*Su imagen es el plano complejo completo excepto el origen, pues:
rlnxdondedeere xz
* Es una función periódica de período jk2 , Zk
b) Función logarítmica: w = log z
w = log z = Zkk2wjz arg.ln
Si k = 0, el valor principal se denomina como Log z= wjzln arg
c) Funciones trigonométricas e hiperbólicas
j2
eezsen
jzjz ; sen (-z) = -sen z ; sen ( z + 2 ) = sen z. ; D sen z = cos z
2
eezcos
jzjz ; cos (-z) = cos z ; cos ( z + 2 ) = cos z. ; D cos z = - sen z
Sh z = 2
ee zz ; Ch z =
2
ee zz
ECUACIONES EN EL CAMPO COMPLEJO
Recordemos de Álgebra:
a) Los conceptos de raíces simples y múltiples.
Sea una raíz de la ecuación algebraica f(x)=an.xn + an-1.x
n-1 +…………..+ a1.x + a0 = 0,
es decir que f() = 0. Esto equivale a que el polinomio f(x) es divisible por (x-). Puede
ocurrir que f(x) sea divisible por una potencia de (x-)m, y que el exponente m sea el
más alto posible, es decir, que f(x) no sea ya divisible por (x-)m+1; en otros términos,
que el factor primo (x-) figure en la descomposición de f(x) exactamente con el
exponente m: f(x) = (x-)m.g(x), donde ya (x-) no es divisor de g; o lo que es
equivalente: g() 0. Entonces el número natural m se llama la multiplicidad o el
orden de multiplicidad de la raíz . Este último número es raíz simple si m = 1, y raíz
múltiple si m > 1.
b) El Teorema fundamental del Álgebra
Toda ecuación algebraica f(x) = 0 de grado no nulo, de coeficientes reales o complejos,
tiene al menos una raíz (real o compleja)
Apéndice
180
Una ecuación grado n, P(x) = 0 puede escribirse, en el campo complejo, en la forma
factoreada: r21 k
r
k
2
k
1 xx.................xx.xx.a con kj 1, ( j = 1,2,……,r), y
k1+k2+…………..+kr = n
Una raíz xj será múltiple si kj > 1, y el entero kj se llama orden de multiplicidad.
Si una raíz no es múltiple, es decir k = 1, se llama simple. Como la suma de los kj es n,
tenemos: en el campo complejo, una ecuación de grado n tiene exactamente n
raíces, contando cada una con su orden de multiplicidad.
SERIES POTENCIALES:
n0n
zz.na0
Las series de potencias tienen un “buen” comportamiento, bajo la suma, multiplicación,
diferenciación e integración; la cual las hace útiles en análisis complejo.
* La suma o resta término a término de dos series de potencias con radios de
convergencia R1 y R2, produce una serie de potencias con radio de convergencia por lo
menos igual al menor de R1 y R2.
* La multiplicación término a término de dos series de potencias significa la
multiplicación de cada término de la primera serie por cada término de la segunda serie
y el agrupamiento de los términos que tienen la misma potencia de z.
* La diferenciación e integración de término a término de una serie de potencias es
permisible. La serie de potencias que se obtiene de derivar término a término se
denomina serie derivada de la serie de potencias.
* La serie derivada de una serie de potencias tiene el mismo radio de convergencia
que la serie original.
* Una serie de potencias con radio de convergencia R diferente de cero representa
una función analítica en todo punto interior de su círculo de convergencia. Las
derivadas de esta función se obtienen por diferenciación término a término de la serie
original. Todas las series así obtenidas tienen el mismo radio de convergencia que la
serie original. Por tanto, cada una de ellas representa una función analítica.

Apéndice
181
Álgebra Lineal
El estudio de las matrices tiene su origen en los sistemas de ecuaciones
algebraicas lineales. Considere el siguiente ejemplo:
x x x
x x x
x x x
1 2 3
1 2 3
1 2 3
3
1
2 3 6
(a-1)
Estas ecuaciones pueden escribirse utilizando la forma vectorial-matricial como:
6
1
3
312
111
111
3
2
1
x
x
x
(a-2)
Si llamamos: A
1 1 1
1 1 1
2 1 3
x =
x
x
x
u
3
1
6
1
2
3
, ,
entonces (a-2) puede expresarse como:
Ax = u
donde A es una matriz (3,3), , y x y u vectores ( o matrices 3x1).
La forma genérica de denominar a la matriz A es
A
a a a
a a a
a a a
a
n
n
m m mn
ij
11 12 1
21 22 2
1 2
Matriz identidad:
Es una matriz cuadrada, tal que todos los elementos de la diagonal son iguales a 1, y los
elementos fuera de la diagonal son cero:
aij=1, i=j aij=0, ij . Por ejemplo, la matriz identidad de orden 3 es:
I
1 0 0
0 1 0
0 0 1
Matriz diagonal: D
d 0 0
0 d 0
0 0 d
11
22
33
Matriz simétrica: La matriz cuadrada A es simétrica si aij= aji ,para todo i , j

Apéndice
182
Transpuesta de una matriz:
Si A
a a a
a a a
a a a
11 12 13
21 22 23
31 32 33
entonces, A T
a a a
a a a
a a a
11 21 31
12 22 32
13 23 33
Traza:
tr(A)= a11+ a22+ . . . +ann
Determinante:
El determinante de una matriz cuadrada es un número que se puede calcular haciendo la
suma de los productos de los elementos de una línea (fila o columna) , por sus
respectivos adjuntos.
Cofactor o adjunto
El cofactor cij del elemento aij de la matriz cuadrada A está dada por
cij = (-1)i+j mij
donde mij es el menor del elemento aij , es decir , el determinante de la matriz (n-1)x(n-
1) que queda cuando se quitan la fila y la columna que incluye a aij . Por ejemplo, para
A(3x3), m21=
a a
a aa a a a
12 13
32 3312 33 13 32
Matriz Inversa
AA
A
1 adj
donde, adj A es la matriz adjunta de la matriz cuadrada A , la que se define a partir de
la definición de cofactor, como:
Matriz Adjunta
Es la matriz de los cofactores, transpuesta. Si A (3x3): adj A
c c c
c c c
c c c
T11 12 13
21 22 23
31 32 33
Integración y diferenciación
La derivada (o la integral) de una matriz, se obtiene diferenciando (o integrando) la
matriz elemento por elemento.
Autovalores y autovectores
Definición: Un autovalor de una matriz cuadrada A (n n) es uno de los escalares
que permiten una solución no trivial (x 0) a la ecuación
A x = x

Apéndice
183
Observe que esta ecuación se puede escribir en la forma:
A x = I x
A x - I x = 0
(A - I ) x = 0
Un vector solución x no trivial existe solamente si det (A - I ) = 0.
Por lo tanto, los autovalores de A son las raíces de su ecuación característica, es decir,
del polinomio que resulta de calcular el determinante de la matriz: A- I . Observe que
este polinomio es de orden n. Por lo tanto existen n autovalores, 1, 2 , . . . , n . Estos
valores pueden ser todos distintos, o repetidos.
Asociado a cada autovalor i , existe una solución xi de la ecuación A x = x . Este
vector solución se llama autovector o vector propio. (xi se llama también vector
invariante respecto de la transformación A x )
Observe que los autovectores tienen longitud arbitraria: para cualquier escalar , si x es
solución de A x = x , entonces x también lo es, ya que A x = x . Un autovector
es normalizado a la unidad, si su longitud es la unidad, es decir x 1.
Ejemplo 1:
a) Calcule los autovalores de la matriz
31
43 Rta: 1 y 5.
b) Calcule el conjunto de autovectores asociado al autovalor =1. Rta.:x1=
b
b2 ;
b
c) Encuentre el autovector asociado al autovalor =1 que tiene norma 1.
Rta: x1=1
5
2
1
Ejemplo 2:
Repetir los incisos del Ejemplo 1 para
221
131
122
Rtas.: a) 5, 1 y 1; b) x1=
k
k
k
Ejemplo 3:
Proponer una matriz diagonal cualquiera y verificar que sus autovalores coinciden con
los elementos de la diagonal.
Ejemplo 4: A=
21
01 a) Verificar que A-1 =
5050
01
..
b) Encontrar los autovalores y autovectores de A-1.
c) ¿Cuales son sus conclusiones?
Apéndice
184
Propiedades de interés:
n
ii
n
iii
n
ii
TT
a)(traza
)(
)()(
11
1
111
11
11
11
A
A
ABA.B
AA
AA
IAAAA
BAAB
Apéndice
185
TABLAS
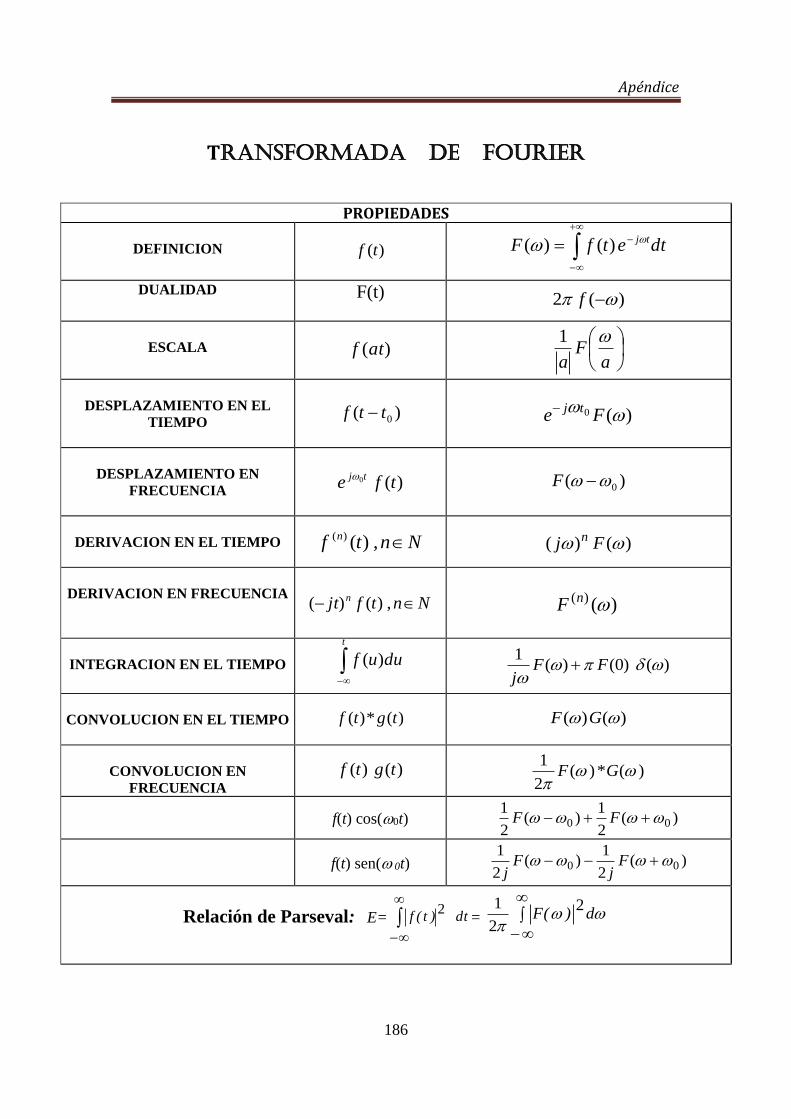
Apéndice
186
TRANSFORMADA DE FOURIER
PROPIEDADES
DEFINICION )(tf
dtetfF tj )()(
DUALIDAD F(t)
)(2 f
ESCALA )(atf
aF
a
1
DESPLAZAMIENTO EN EL
TIEMPO
)( 0ttf )(0 Fe
tj
DESPLAZAMIENTO EN
FRECUENCIA
)(0 tfetj
)( 0 F
DERIVACION EN EL TIEMPO
Nntf n ,)()(
)()( Fj n
DERIVACION EN FRECUENCIA
Nntfjt n ,)()( )()( nF
INTEGRACION EN EL TIEMPO
t
duuf )( )()0()(
1
FF
j
CONVOLUCION EN EL TIEMPO
)(*)( tgtf )()( GF
CONVOLUCION EN
FRECUENCIA
)()( tgtf )(*)(2
1
GF
f(t) cos(0t) )(
2
1)(
2
100 FF
f(t) sen( 0t)
)(2
1)(
2
100 F
jF
j
Relación de Parseval: E=
dt)t(f2
=
d)(F2
2
1
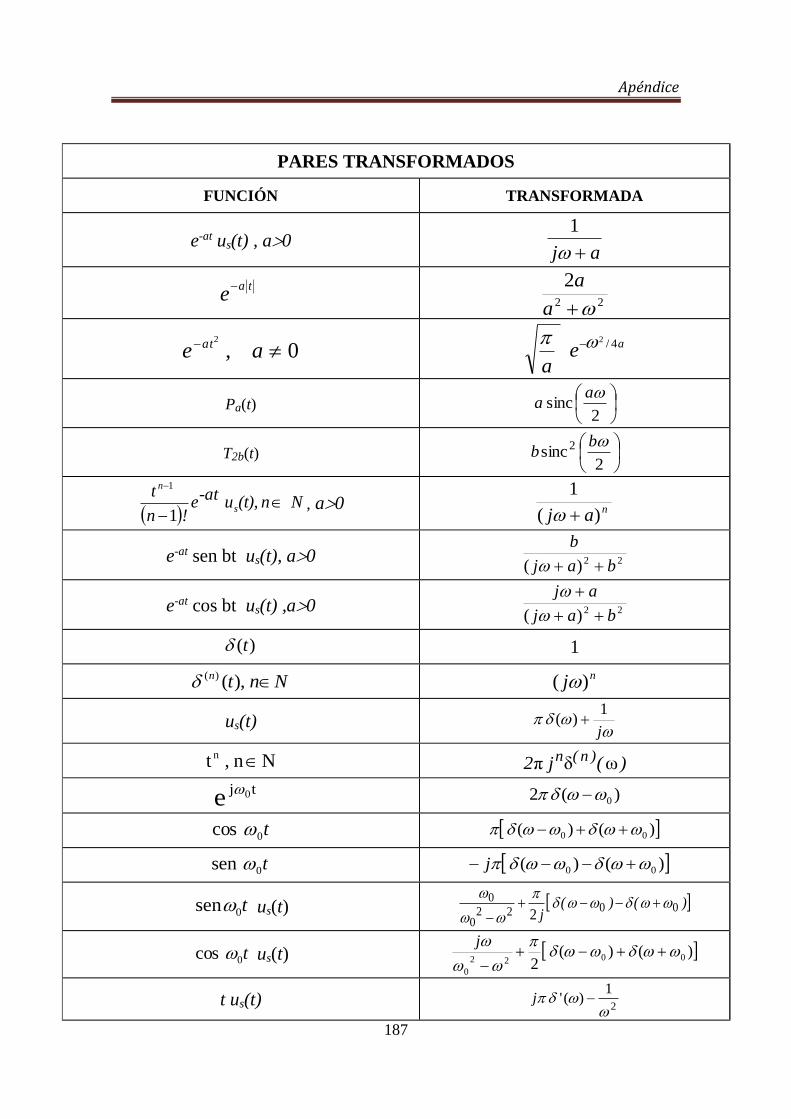
Apéndice
187
PARES TRANSFORMADOS
FUNCIÓN TRANSFORMADA
e-at us(t) , a0 aj
1
tae
22
2
a
a
0,2
ae at
aea
4/2
Pa(t)
2sinc
aa
T2b(t)
2sinc2 b
b
Nn(t), u-ate
!n
ts
n
1
1
, a0 naj )(
1
e-at sen bt us(t), a0 22)( baj
b
e-at cos bt us(t) ,a0 22)( baj
aj
)(t 1
Nntn ),()( nj )(
us(t)
j
1)(
N n, t n )(j2 )n(n ωδπ
etj 0
)(2 0
t0 cos )()( 00
t0sen )()( 00 j
t0sen us(t) )()(j
00220
0
2
t0 cos us(t) )()(2
0022
0
j
t us(t) 2
1)('
j
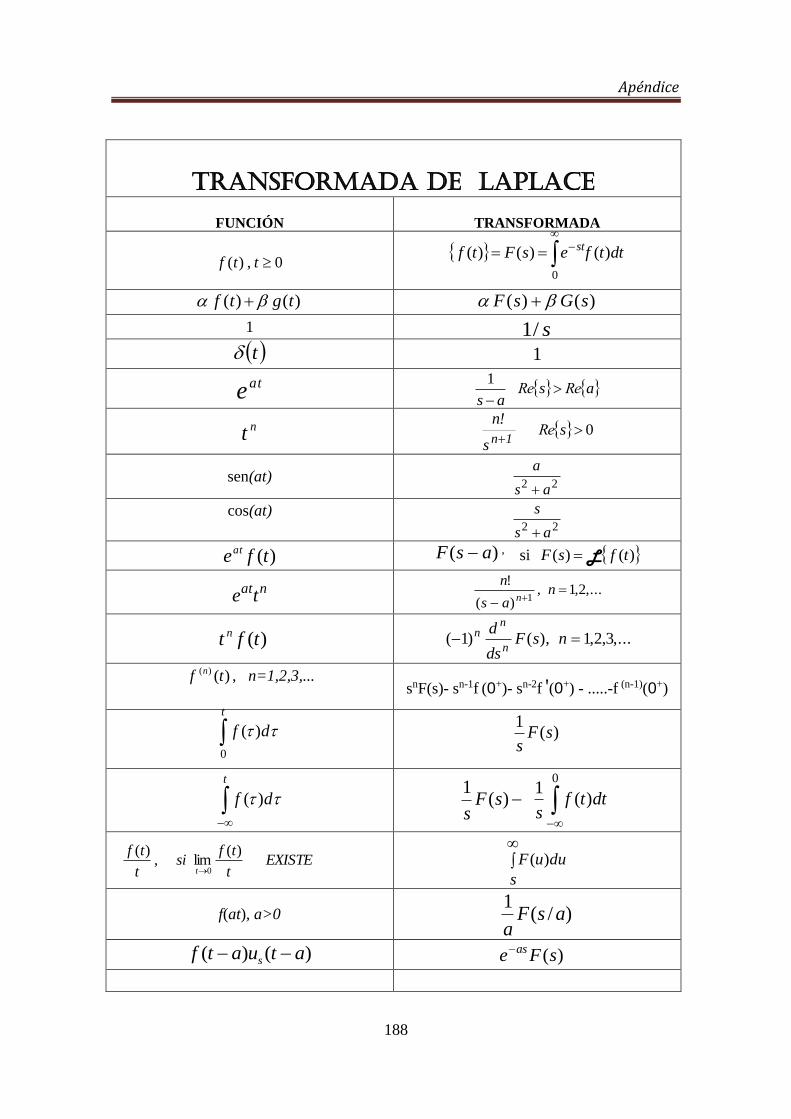
Apéndice
188
TRANSFORMADA DE LAPLACE
FUNCIÓN
TRANSFORMADA
0,)( ttf
0
)()()( dttfesFtf st
)()( tgtf )()( sGsF
1 s/1
t 1
ate as
asReRe
1
nt 1ns
!n
0sRe
sen(at) 22 as
a
cos(at)
22 as
s
)(tfeat )( asF , si )()( tfsF L
natte ,...2,1,
)(
!1
nas
nn
)(tft n ,...3,2,1),()1( nsF
ds
dn
nn
)()( tf n , n=1,2,3,...
snF(s)- sn-1f (0+)- sn-2f '(0+) - .....-f
(n-1)(0+)
t
df
0
)( )(1
sFs
t
df )( )(1
sFs
0
)(1
dttfs
EXISTEt
tfsi
t
tf
t
)(lim,
)(
0
s
duuF )(
f(at), a>0 )/(1
asFa
)()( atuatf s )(sFe as
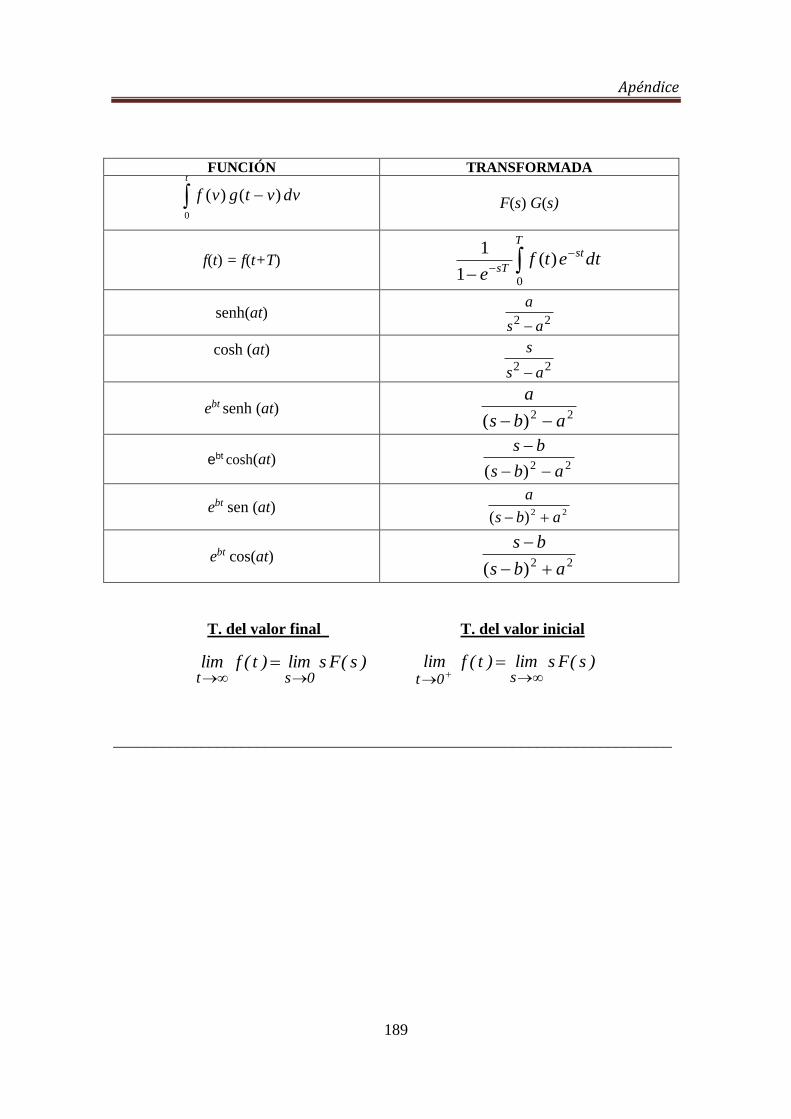
Apéndice
189
FUNCIÓN TRANSFORMADA
t
dvvtgvf0
)()( F(s) G(s)
f(t) = f(t+T) dtetfe
Tst
sT
0
)(1
1
senh(at) 22 as
a
cosh (at)
22 as
s
ebt senh (at) 22)( abs
a
ebt cosh(at) 22)( abs
bs
ebt sen (at) 22)( abs
a
ebt cos(at) 22)( abs
bs
T. del valor final T. del valor inicial
)s(Fslim)t(flim
0st )s(Fslim)t(flim
st 0
______________________________________________________________________

Apéndice
190
Variables de Estado
)()()(
)()()()()(
0
00
tuDtxCty
duBttxtttx
t
t
2ª Forma Canónica
1210 ...
1...000
0...100
0...010
naaaa
A ;
1
0
0
0
B ; nbD
)()(......)()( 11221100 nnnnnnnn babbabbabbabC
Transformación
PAPAv
1 ; BPBv
1 ; PCCv ; DDv
Método de Cayley – Hamilton :
1
0
n
i
ii
t t γe AA ,
Los tγi se obtienen de ,...,N,j,λ t γtγeN
i
iji
tλ j 211
10
Señales de potencia y energía
Para calcular la energía:
L
Ldttf
L
2limE
Para analizar si es de potencia:
L
LL
dttfL
2
2
1lim0
______________________________________________________________________
Propiedades Delta de Dirac 1) 00 /0)( ttttt
2) 2010 1)(
2
1
tttsidttt
t
t
extensible a intervalos infinitos

Apéndice
191
3) Si f(t) es continua en )()()()( 00001 tttftttftt
4) battencontínuaestgbtasi
btasitgdttgtt
b
a
;)(
0
)()()( 0
0
00
0
5) 1010
2
1
0 ,)()()( tttconttdtt
t
t
6) 1010)(
2
1
0)( ,)()1()()( tttcontfdtttf kk
t
t
k
7)
0
0
000
1)()(
ttsi
ttsidtttu
t
8) tda
tt
atdtat
)(1
)( 00
9) )()( tt
__________________________________________________________________
SERIES DE LAURENT
(1))z(z
b)z(zaf(z)
1nn
0
n
0n
n
0n
C
n(2)....)0,1,2,....(ndz
z(z
f(z)
j2
1a
0
n 1) (3)...)1,2,......(ndz
z(z
f(z)
j2
1b
0
n
C
n 1)
Desarrollos en serie más utilizados:
1) Serie binomial:
!n
)1n)........(1(
n,1
0donde;1z,z
n)z1(
0n
n
Casos particulares:
1-1) ..............1)1(1,)1(1
1 321
0
zzzzózzz n
nn
1-2) ..............1))(1(1,)(1
1 321
0
zzzzózzz n
n
1-3) 1z...,..........!3
z)2m)(1m(m
!2
z)1m(mmz1)z1(
32m
2)
z,
)!1n2(
z)1(zsen
1n
1n21n
3)
z,)!n2(
z)1(1zcos
1n
n2n ; 4)
z,!n
z1e
1n
nz

Apéndice
192
SERIE DE FOURIER
Serie exponencial o compleja de Fourier
f(t) = n
0jnw t
c en
donde
T
2
n
T
2
0jnw t1
f(t).e dtT
c
y 0
2πw
T
Serie trigonométrica de Fourier
n 0 n 0
n 1
0 a cos(nw t) b sen(nw t)a
f(t)2
con
T
2
0
T
2
2a f(t)dt
T
;
T
2
n 0
T
2
2a f(t)cos(nw t) dt
T
T
2
n 0
T
2
2b f(t)sen(nw t) dt
T
Si f(t) es par:
n 0
n 1
0 a cos(nw t)a
f(t)2
con :
T
2
0
0
4a f(t)dt
T ;
T
2
n 0
0
4a f(t)cos(nw t) dt
T ; bn= 0
Si f(t) es impar:
n 0
n 1
b sen(nw t)f(t)
con : a0 = an = 0 ;
T
2
n 0
0
4b f(t) sen(nw t) dt
T
Si f(t) tiene simetría de media onda contiene solamente armónicas impares
2n 1 0 2n 1 0
n 1
a cos(2n 1)w t b sen(2n 1)w tf(t)
con a0 = 0
T
2
2n 1 0
0
4a f(t)cos(2n 1)w t dt
T
T
2
2n 1 0
0
4b f(t) sen(2n 1)w t dt
T
Identidad de Parseval
Si utilizamos la serie compleja de Fourier:
n
2
n
2
T
2
T
2cdtf(t)
T
1
Si utilizamos la serie trigonométrica de Fourier:
1n
2
n
2
n
2
02
T
2
T
2ba
2
1
4
adtf(t)
T
1
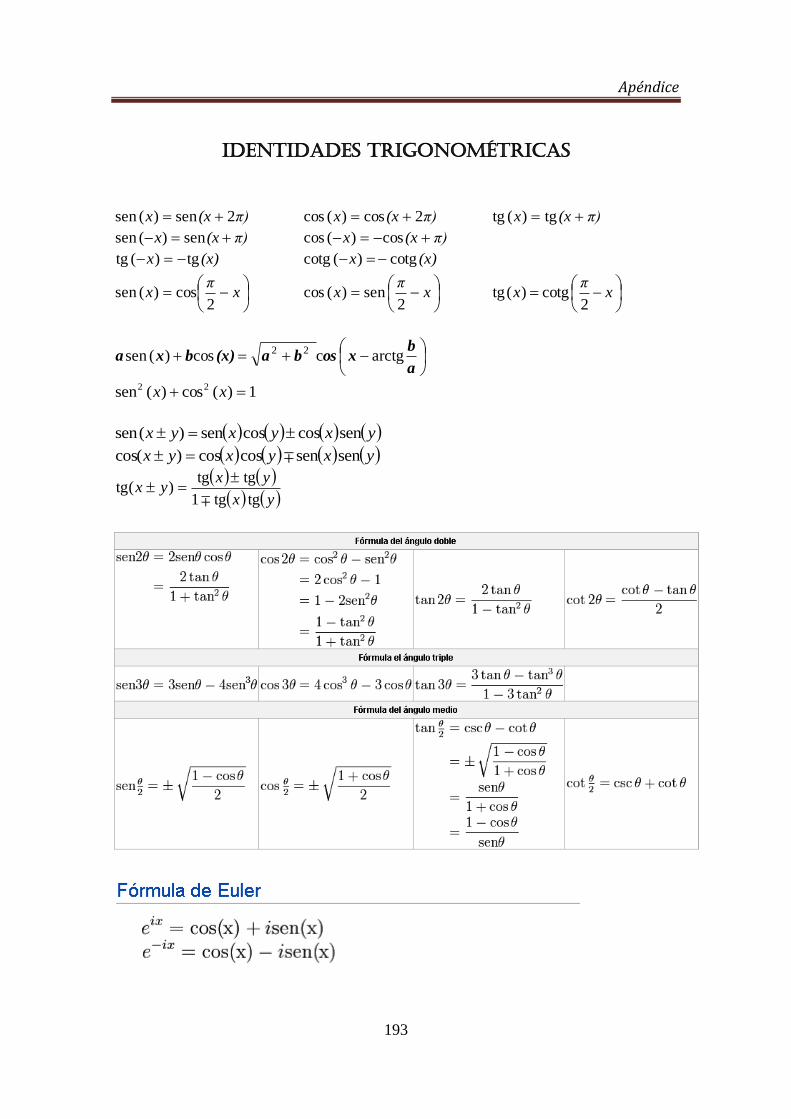
Apéndice
193
Identidades trigonométricas
π)(xx 2sen)(sen π)(xx 2cos)(cos π)(xx tg)(tg
π)(xx sen)(sen π)(xx cos)(cos
(x)x tg)(tg (x)x cotg)(cotg
x
πx
2cos)(sen
x
πx
2sen)(cos
x
πx
2cotg)(tg
a
bxosba(x)bxa arctgccos)(sen 22
1)(cos)(sen 22 xx
yxyxyx sencoscossen)(sen
yxyxyx sensencoscos)(cos
yx
yxyx
tgtg1
tgtg)(tg

Apéndice
194
Funciones hiperbólicas
)(h2
1)(Ch Cee )(h2
1)(Sh See
)(h/)(h)(Th CS )(h/)(Ch)(Ch S e )(Sh)(Ch eS )(h)(Ch
1)(h)(Ch 22 S
)(Ch)(h)(Ch)(h)(Sh SS
)(Sh)(Sh)(Ch)(Ch)(Ch
)(Th)(Th1
)(Th)(Th)(Th
)(Ch)(Ch2
1)(Sh)(Sh
)(Ch)(Ch2
1)(Ch)(Ch
)(Sh)(Sh2
1)(Ch)(Sh
)(Sh)(Ch)(Sh)(Ch nnn
)(sen)(Sh xixi )(Sh)(sen xixi
)cos()(Ch xxi )(Ch)cos( xxi
)(tg)(Th xixi )(Th)(tg xixi
)(Sh)cos()(Chsen)(sen yxiy(x)iyx
)(Sh)(sen)(Chcos)(cos yxiy(x)iyx
)(ArgSh)(sen arc xixi
)(ArgCh)(cos arc xiixi
x
xxixi
1
1ln
21)(ArgTh)( tgarc