analisis de cointegraci´ on y factores comunes en´ …analisis de cointegraci´ on y factores...
TRANSCRIPT

Analisis de cointegracion y factores comunes ensistemas de indicadores economicos
Ignacio Dıaz-Emparanza
11 de Junio, 1993

2

Indice general
1. Introduccion 5
2. Modelos de factores comunes 92.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2. Modelos de tendencias comunes . . . . . . . . . . . . . . . . . . . . . 112.3. Modelos de factores estacionales comunes . . . . . . . . . . . . . . . . 132.4. Mod. de tendencias y factores estac. comunes . . . . . . . . . . . . . . 15
3. Cointegracion y factores comunes 173.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3. Relacion entre cointegracion y factores comunes . . . . . . . . . . . . . 21
3.3.1. Modelos con tendencias comunes . . . . . . . . . . . . . . . . 213.3.2. Modelos con factores comunes estacionales . . . . . . . . . . . 223.3.3. Modelos con tendencias y factores estacionales comunes . . . . 27
4. Contrastes de r.u. y de cointegracion 314.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2. Contrastes de raıces unitarias en la frecuencia cero . . . . . . . . . . . 32
4.2.1. Contrastes de Dickey y Fuller . . . . . . . . . . . . . . . . . . 324.2.2. Contraste de Bhargava . . . . . . . . . . . . . . . . . . . . . . 334.2.3. Contrastes de Phillips . . . . . . . . . . . . . . . . . . . . . . . 34
4.3. Contrastes de Cointegracion en la frecuencia cero . . . . . . . . . . . . 344.4. Contrastes de r.u. en las frecuencias estacionales . . . . . . . . . . . . . 35
4.4.1. Contrastes de Hasza y Fuller . . . . . . . . . . . . . . . . . . . 364.4.2. Contrastes de Dickey, Hasza y Fuller . . . . . . . . . . . . . . 374.4.3. Contraste de Bhargava . . . . . . . . . . . . . . . . . . . . . . 384.4.4. Contraste de Hylleberg, Engle, Granger y Yoo (HEGY) . . . . . 38
5. Contrastes de integracion estacional 415.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 415.2. Contraste con un estadıstico tipo F . . . . . . . . . . . . . . . . . . . . 425.3. Potencia del contraste . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.3.1. Hipotesis alternativas con igual modulo en todas sus raıces . . . 43
3

4 INDICE GENERAL
5.3.2. Hipotesis alternativas con raıces de distinto modulo . . . . . . . 465.4. Series con estructura en el componente no estacional . . . . . . . . . . 495.5. Metodo de contraste basado en un estadıstico de tipo t . . . . . . . . . 52
5.5.1. Potencia del contraste . . . . . . . . . . . . . . . . . . . . . . 535.5.1.1. Igual modulo en todas las raıces estacionales . . . . . 535.5.1.2. Hipotesis alternativas con raıces de modulo diferente 54
Apendices 575.A. Polinomio con raıces del mismo modulo . . . . . . . . . . . . . . . . . 575.B. Modelos para hipotesis alternativas con diferente numero de raıces uni-
tarias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
6. Estimacion de modelos de factores comunes 616.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 616.2. Estimacion de modelos con tendencias comunes . . . . . . . . . . . . . 62
6.2.1. Maximizacion de la funcion de verosimilitud espectral del modelo 626.2.2. Metodo de estimacion basado en el modelo de correcion de error 65
6.3. Est. de mod. con factores comunes estacionales . . . . . . . . . . . . . 686.3.1. Maximizacion de la funcion de verosimilitud espectral del modelo 686.3.2. Metodo basado en el modelo de correccion de error . . . . . . . 69
6.3.2.1. Estimacion . . . . . . . . . . . . . . . . . . . . . . . 756.3.2.2. Estimacion de factores completos . . . . . . . . . . . 77
7. Indicadores economicos 817.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 817.2. Modelo teorico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 827.3. Indicadores cıclicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7.3.1. Cointegracion en sistemas de indicadores . . . . . . . . . . . . 857.3.2. Analisis de los indicadores de la Economıa Espanola . . . . . . 86
7.3.2.1. Punto de partida . . . . . . . . . . . . . . . . . . . . 867.3.2.2. Estudio de cointegracion . . . . . . . . . . . . . . . 88
7.3.2.2.1. El ciclo de referencia. . . . . . . . . . . . . 887.3.2.2.2. Indicadores adelantados . . . . . . . . . . . 987.3.2.2.3. Indicadores retrasados . . . . . . . . . . . . 101
7.3.3. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . 1037.4. Indicadores de produccion . . . . . . . . . . . . . . . . . . . . . . . . 104
7.4.1. Cointegracion completa . . . . . . . . . . . . . . . . . . . . . 1067.4.2. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
8. Conclusiones 115
A. Los datos 119
B. Graficos 121
Capıtulo 1
Introduccion
Los objetivos principales de los distintos metodos de analisis de series economicastemporales son: en primer lugar, explicar el comportamiento que historicamente hanseguido los valores observados de las series, y en segundo lugar, obtener prediccionespara valores futuros de dichas series.
Para llevar a cabo tanto el primer como el segundo objetivo, es importante realizaruna observacion detallada de cada una de las series de interes. La observacion de se-ries economicas proporciona una informacion que, mas tarde, sera utilizada de formadiferente por cada uno de los distintos metodos de series temporales (modelos ARIMA,modelos estructurales, etc) con vistas a conseguir alguno de los objetivos anteriormentecitados (o ambos).
El presente trabajo se va a centrar en series de datos temporales recogidos a inter-valos de tiempo inferiores al ano, tomando como referencia, mientras no se mencioneexpresamente lo contrario, el perıodo mensual.
La inspeccion visual de muchas series economicas temporales suele llevar a variasconclusiones: por un lado, es frecuente que sus medias no sean constantes en el tiempo,sino que muestren alguna tendencia (casi siempre creciente), y por otro lado, si las seriesson mensuales o trimestrales, suelen presentar un comportamiento de tipo “periodico”donde picos y valles se presentan “casi en los mismos perıodos” cada ano; esto se conocecomo estructura estacional. En la literatura de series temporales se suele considerar quelas series de datos de perıodo inferior al ano, estan formadas por varios componentes,que normalmente se resumen en tres: componente de tendencia, componente estacionaly componente irregular1.
El componente de tendencia recoge las fluctuaciones de largo plazo, incluyendotambien las variaciones debidas a los ciclos economicos (o ciclos de negocios) si es queexisten en la serie.
El componente estacional recoge la evolucion de la serie que es motivada por losciclos de frecuencias estacionales. Estos ciclos, normalmente se atribuyen a la influenciade factores fısicos (clima, etc) o factores de tipo sociologico (costumbres) y, en cualquier
1Algunos autores ademas mencionan un componente cıclico, pero aquı este componente se conside-rara incorporado dentro de la tendencia (Uriel (1985), pag. 16)
5
6 CAPITULO 1. INTRODUCCION
caso son ciclos de perıodo corto, aunque pueden ser permanentes a largo plazo.El componente irregular refleja las variaciones no sistematicas de la serie, que se
suponen aleatorias y no predecibles.El comportamiento del componente de tendencia de una serie temporal ha sido am-
pliamente estudiado (Ver Fuller, 1976; Nerlove, Grether y Carvalho, 1979; Harvey, 1981,1985, 1989, ,... etc). Al principio, el interes estuvo en la estimacion de los componentesde tendencia como estructuras deterministas; para ello se utilizaron diversos metodos,siendo uno de los mas aceptados el que considera como regresor a la variable tiempo(ver p.ej Uriel, 1985). Este metodo se basa en el teorema de aproximacion de Weiers-trass, por el cual cualquier funcion continua definida sobre un intervalo compacto en larecta real, puede ser uniformemente aproximado mediante un polinomio. Mas adelantese aceptaron modelizaciones con componentes estocasticos, en algunos modelos de for-ma implıcita (modelos ARIMA y ARIMA estacionales) y en otros de forma explıcita(modelos UCARIMA y estructurales estocasticos).
El primer objetivo planteado al iniciar el presente trabajo fue el estudio sobre coin-tegracion y factores de tendencia comunes aplicado a una clasificacion de indicadoreseconomicos del ciclo de negocios realizada comparando los puntos crıticos (maximosy mınimos locales) de una amplia gama de indicadores de la economıa, respecto a unindicador de referencia que supuestamente refleja las variaciones cıclicas de la activi-dad economica en Espana. Se toma como base la clasificacion realizada por (FernandezMacho, 1991). Hay que senalar que al inicio de este trabajo no habıan llegado a mi cono-cimiento la mayor parte de los trabajos sobre cointegracion estacional y raıces unitariasestacionales que ahora, a la finalizacion del mismo, se encuentran publicados y dispo-nibles. En unos casos esto se debe a que su publicacion ha sido bastante reciente, porejemplo: Hylleberg, Engle, Granger y Yoo (1990), Granger (1991), Lee (1992), etc; y enotros casos debido al retraso en recibir la informacion (Por ejemplo, Engle, Granger yHallman, 1989). Ası que la primera dificultad que se ha tenido que afrontar es el hechode que toda la literatura conocida, en un principio, sobre cointegracion, estaba basadaen la frecuencia cero y por lo tanto debıa aplicarse a datos anuales o desestacionaliza-dos. Sin embargo, en los ultimos tiempos se ha producido bastante literatura en contrade los procedimientos habitulaes de desestacionalizacion (P.ej.: Maravall, 1992), y si sedesea trabajar con indicadores cıclicos el perıodo de referencia ha de ser el mensual.En concreto, para desarrollar el trabajo que nos habıamos planteado se deberıa trabajarincluso con las mismas series de datos (mensuales) que (Fernandez Macho, 1991) utili-zaba. Solamente dos de los contrastes de raıces unitarias disponibles2 tenıan en cuentala posibilidad de que las series presentaran raıces unitarias estacionales, pero en los dosse contrastaba simultaneamente una raız unitaria en la frecuencia cero (ver secciones4.4.1 y 4.4.2). De ahı viene el interes por el contraste del estadıstico F desarrollado enel capıtulo 4, en el cual bajo la hipotesis nula se contempla una raız unitaria en cadafrecuencia estacional sin imponer necesariamente una raız unitaria en la frecuencia ce-ro. La aparicion del artıculo de Hylleberg et al (1990) ha arrojado nueva luz sobre lamanera de contrastar la existencia de raıces unitarias en una serie temporal. En dicho
2Contrastes de (Hasza y Fuller, 1982) y (Dickey et al, 1984).
7
trabajo (ver seccion 4.4.4) el interes se centra en el contraste de cada una de las raıcesunitarias por separado. El conocimiento del artıculo presentado por (Engle et al, 1989)nos llevo a una solucion al problema estacional, planteando la hipotesis de cointegracionestacional en nuestros modelos y al estudio de los modelos con factores comunes esta-cionales, siendo estos factores series temporales con una raız unitaria en cada frecuenciaestacional. Si los factores comunes a un conjunto de series dado son de este tipo, cadauna de las series contendra tambien una raız unitaria en cada frecuencia estacional y portanto, para este tipo de series cobra especial interes el contraste del estadıstico F descritoen el capıtulo 4, en detrimento de otro tipo de contrastes no disenados especıficamentepara la hipotesis nula de que todas las raıces estacionales son unitarias.
Por otra parte, Stock y Watson (1988) han demostrado la equivalencia entre un mo-delo multivariante cointegrado en la frecuencia cero y un modelo de tendencias comu-nes. Intuitivamente, es facil comprender que en el componente estacional ha de ocu-rrir algo parecido. Tomando como base la demostracion de Stock y Watson es sencillodemostrar que si un vector presenta cointegracion en una determinada frecuencia esta-cional existira un modelo con factores comunes integrados en dicha frecuencia que lorepresente, y viceversa. Sin embargo, cuando se consideran simultaneamente varias fre-cuencias estacionales, el resultado no se comprueba de forma tan simple. En la seccion3.3.2 se demuestra la equivalencia entre un modelo cointegrado estacional y uniforme-mente (con los mismos vectores cointegrantes en todas las frecuencias estacionales) yun modelo de factores estacionales comunes, donde dichos factores presentan una raızunitaria en cada frecuencia estacional.
El capıtulo 6 trata sobre la estimacion de modelos de factores comunes. FernandezMacho (1986) propuso un metodo basado en la utilizacion del criterio de maxima verosi-militud en el dominio de la frecuencia, que antes ya se habıa aplicado a la estimacion delos modelos estructurales univariantes3. Sin embargo, el metodo de estimacion propues-to por Gonzalo y Granger (1991) permite una estimacion de las tendencias comunescomputacionalmente mas rapida (y de mas sencilla programacion). La estimacion demodelos con factores estacionales comunes se puede realizar mediante la extension delprocedimiento de Fernandez, que el mismo presenta en el citado trabajo. En la seccion6.3.2 se plantea una adaptacion del procedimiento de Gonzalo y Granger para la esti-macion de un modelo en el que los factores comunes presentan raıces unitarias en todaslas frecuencias estacionales. Dicho procedimiento se puede extender directamente pa-ra la estimacion de factores comunes que, ademas de las raıces unitarias estacionales,contengan una raız unitaria en la frecuencia cero. Este metodo presenta aun mas rapidezcomputacional respecto al de Fernandez (1986) en la estimacion de los factores comunesestacionales.
Disponer de una estimacion de los factores comunes de un modelo permite efectuarun analisis detallado de los mismos. La aplicacion de modelos de factores comunes ysu estimacion puede ser de utilidad en diversos campos. En el contexto de indicadorescıclicos, es interesante la obtencion de los factores comunes a varias series, para reali-zar el analisis del comportamiento comun de todo el conjunto. Es posible plantear una
3Harvey y Peters (1990).
8 CAPITULO 1. INTRODUCCION
interpretacion de dichos factores como indicadores sinteticos de actividad, cuando lasseries que intervienen en el modelo son indicadores coincidentes en el con el ciclo, oindicadores sinteticos adelantados, cuando en el modelo intervienen indicadores adelan-tados respecto al ciclo. Si en un determinado vector de series temporales se detectanfactores de tendencia comun y factores comunes estacionales (o factores completos quecontengan los dos componentes) el estudio de dichos factores permitira obtener conclu-siones acerca de la tendencia, o del componente estacional respectivamente, de todo elconjunto.
El trabajo se ha desarrollado de la siguiente forma:
En el Capıtulo 2 se presentan las caracterısticas fundamentales de los modelos defactores comunes, considerando tanto factores de tendencia como estacionales.
El Capıtulo 3 analiza la relacion entre el concepto de cointegracion y los modelosde factores comunes, tanto en la frecuencia cero como en las frecuencias estacio-nales.
En el Capıtulo 4 se hace una revision de los principales contrastes de raıces uni-tarias y cointegracion, considerando en primer lugar los contrastes relativos a lafrecuencia cero y despues los contrastes de raıces unitarias estacionales.
En el Capıtulo 5 se presentan dos metodos para el contraste de la hipotesis deexistencia de una raız unitaria en cada frecuencia estacional. Se incluyen las res-pectivas pruebas sobre la potencia de los mismos.
El Capıtulo 6 revisa los metodos de estimacion de modelos con factores comunes.Se incluyen dos metodos para la estimacion de modelos con tendencias comunes(Fernandez Macho, 1986; Gonzalo y Granger, 1991), se describe el metodo pro-puesto tambien por Fernandez Macho (1986) para estimar modelos con factoresestacionales y se propone una extension del metodo de Gonzalo y Granger paraefectuar la estimacion de este tipo de modelos.
En el Capıtulo 7 se presentan dos aplicaciones de los modelos de factores comu-nes a series economicas. La primera de ellas se basa en una clasificacion de losindicadores cıclicos en funcion de su comportamiento respecto al ciclo economi-co, tratando de extraer los factores comunes de series que sean del mismo tipo encuanto a su retraso o adelanto respecto al ciclo. En la segunda se tratan de extraerlos componentes permanentes comunes de diversos indicadores de produccion.
Capıtulo 2
Modelos de factores comunes
2.1. Introduccion
En Economıa es muy frecuente que las series de datos temporales sean no estaciona-rias. En la mayorıa de los casos se observa que las series no son estacionarias en mediay, muchas veces, tampoco lo son en varianza. Siguiendo la metodologıa del analisisARIMA clasico (Box y Jenkins, 1970) la transformacion mas utilizada para este tipode series es la toma de diferencias. Tomando diferencias sobre las series no estaciona-rias se suele conseguir estacionariedad, sin embargo, al tomar diferencias se pierde laestructura de largo plazo de las series, quedando solo en ellas el componente transitorio.Cuando se comparan graficamente varias series temporales economicas, algunas vecesse puede apreciar que la trayectoria de largo plazo de distintas variables parece seguiruna evolucion con reacciones simultaneas a lo largo del tiempo, es decir, una evolucioncomun.
Al observar la tendencia de las series, algunos investigadores pensaron en la posi-bilidad de que exista algun motivo por el cual las tendencias de distintas series puedanpresentar una evolucion comun. Estas ideas, por una parte, han llevado a proponer mo-delos con factores de tendencia comun (Stock y Watson, 1988; Fernandez Macho, 1986;Fernandez Macho, Harvey y Stock, 1987) y, por otra parte, han llevado a formular de-finiciones como las de paralelismo (Raveh, 1989) o cointegracion de series temporales(Engle y Granger, 1987).
De la misma manera en que se ha apreciado la posibilidad de que distintas serieseconomicas presenten caracterısticas comunes en su tendencia, tambien se puede pensarque los componentes estacionales de diferentes series pueden estar influenciados porlos mismos impulsos. Ası, la idea de cointegracion estacional que ha sido ya planteadapor Engle, Granger y Hallman (1989), refleja la posibilidad de que los componentesestacionales de distintas series guarden una relacion de caracter permanente a lo largodel tiempo. Una forma mas explıcita de considerar este fenomeno es mediante un modelocon factores comunes estacionales, que podrıa ser1:
1Este es un caso particular del modelo presentado por Fernandez Macho (1986) y tambien del reciente-mente comentado por Granger (1991)
9

10 CAPITULO 2. MODELOS DE FACTORES COMUNES
ytn× 1
= An× k
stk × 1
+ εtn× 1
(2.1)
S(L) stk × 1
= ωtk × 1
(2.2)
donde:
S(L) = (1 + L + L2 + · · · + LS−1), siendo L un operador de retardos, tal queL xt = xt−1;
S es la periodicidad estacional. Por ejemplo, S = 12 si la serie es mensual;
yt es el vector que contiene las observaciones t-esimas de cada una de las n seriestemporales que interesa analizar.
st es un vector formado por k factores estacionales comunes a las n series. Sesupone k < n.
A es la matriz de pesos de los factores.
εt y ωt son dos vectores de n y k variables aleatorias, tales que:[εtωt
]∼ NID
[0,
(Σε 00 Σω
) ](2.3)
En este modelo los componentes estacionales de las n series que forman el vector ytresumen o aglutinan su estructura en torno a solo k factores de tipo puramente estacio-nal. En los siguientes apartados del presente capıtulo se van a revisar las caracterısticasfundamentales de los modelos de tendencias comunes (2.2), se van a estudiar los mo-delos de factores estacionales comunes (2.3), incluyendo el que aquı se ha propuesto, yfinalmente se van a estudiar los modelos que presentan factores estacionales y tendenciascomunes conjuntamente (2.4).

2.2. MODELOS DE TENDENCIAS COMUNES 11
2.2. Modelos de tendencias comunes
Dada la estructura del componente de tendencia de las series temporales, algunosautores pensaron en la posibilidad de que distintas series presenten caracterısticas co-munes en sus tendencias. Ası investigadores como Stock y Watson (1988), FernandezMacho et al (1987) y Fernandez Macho (1986) han formulado modelos con factores detendencia comun.
Box y Tiao (1977, pag 362) comentan que si se trabaja con un vector de series noestacionarias, diferenciarlas a todas ellas puede no ser lo mas adecuado si es solo unpequeno conjunto de factores no estacionarios el que origina la estructura dinamica alargo plazo de los datos. Sin embargo, un modelo de analisis factorial dinamico puedetratar con series no estacionarias de manera bastante obvia. Puede plantearse un modelode la forma:
ytn× 1
= An× k
µtk × 1
+ εtn× 1
t = 0, . . . , T. (2.4)
µt = µt−1 + β + ηt (2.5)
con
[εtηt
]∼ NID
[0,
(Σε 00 Ση
) ], (2.6)
donde µt es el vector que contiene los k factores comunes,A es la matriz de pesos de losfactores, β es el vector de pendientes de los factores y εt y ηt son vectores de variablesaleatorias estacionarias.
Aquı los factores comunes (µt ) se modelan especıficamente como paseos aleatorioscon rumbo, de forma que se pueden interpretar como tendencias lineales comunes. Dadoque µt es de dimension k, este es el numero de tendencias comunes en el modelo.
Como se puede apreciar, el modelo descrito en (2.4-2.5) no es identificable, ya quemediante cualquier matriz P de orden k×k no singular pueden redefinirse la matrizA ylos componentes de tendencia µt comoAP−1 yP µt de manera que sigue cumpliendosela ecuacion (2.4) del modelo. En otras palabras, hay un numero infinito de conjuntos deparametros para los cuales el modelo generarıa identicas series yt y, por tanto, esnecesario elegir un miembro dentro de cada clase de equivalencia de manera que puedaestimarse la estructura del modelo.
Para que (2.4-2.5) sea identificable es necesario imponer restricciones sobre Ση yA. Hay muchas formas de hacerlo, Fernandez Macho (1986) y Fernandez Macho et al(1987) proponen construir Ση de forma que sea una matriz diagonal y que A este for-mada por las primeras k columnas de una matriz triangular hacia abajo, es decir:
A = (aij | aij = 0 para i < j y aii = 1) (2.7)

12 CAPITULO 2. MODELOS DE FACTORES COMUNES
La primera de estas restricciones no es demasiado fuerte, implica que los k factoresde tendencia comunes han de ser ortogonales entre sı. Esta es una condicion que se sueleexigir en cualquier modelo de factores comunes no observables, ya que significa que lainformacion que recoge cada uno de los factores es independiente de la que aportan losdemas.
La ecuacion (2.5) propone un termino de tendencia estocastica que es un paseo alea-torio con rumbo β. Esto significa que cada una de las series que forman el vector yt,diferenciada una vez, es igual a una constante mas un proceso estacionario. Un caso par-ticular se produce cuando β = 0, esto significa que la tendencia es solamente un paseoaleatorio. En este caso el modelo quedarıa:
ytn× 1
= An× k
µtk × 1
+ εtn× 1
t = 0, . . . , T. (2.8)
µt = µt−1 + ηt (2.9)
con
[εtηt
]∼ NID
[0,
(Σε 00 Ση
) ].
La ecuacion (2.5) puede generalizarse de manera que la tendencia recoja alteracionesestocasticas tanto en su nivel como en su pendiente, para ello solo habrıa que modificarlae incluir otra ecuacion que determine el cambio en las pendientes (Theil y Wage, 1964),quedando ası el modelo:
ytn× 1
= An× k
µtk × 1
+ εtn× 1
t = 0, . . . , T. (2.10)
µt = µt−1 + β + ηt (2.11)
βt = βt−1 + ξt (2.12)
con
εtηtξt
∼ NID 0,
Σε 0 00 Ση 00 0 Σξ
,siendo βt la pendiente de los factores, que ahora es estocastica puesto que contiene untermino de perturbacion aleatoria que es ξt.

2.3. MODELOS DE FACTORES ESTACIONALES COMUNES 13
2.3. Modelos de factores estacionales comunes
Como ya se ha mencionado en la introduccion del capıtulo, al igual que se puedepostular la existencia de tendencias comunes entre diversas series, se puede pensar en laexistencia de componentes estacionales comunes a varias series. Una posible forma derecoger este comportamiento es por medio del analisis factorial dinamico, construyendoun modelo donde los factores comunes sean de tipo estacional. Esto se puede hacer dediversas formas. Por ejemplo, supongamos que yt es un vector compuesto por n seriestemporales sin tendencias, pero que siguen un comportamiento estacional comun, sepuede disenar un modelo como el propuesto en la introduccion de este Capıtulo:
ytn× 1
= An× k
stk × 1
+ εtn× 1
(2.13)
S(L) st = ωt (2.14)
donde:
S(L) = (1 + L+ L2 + · · ·+ LS−1);
S es la periodicidad estacional. Por ejemplo, S = 12 si la serie es mensual;
st es un vector formado por k factores estacionales comunes a las n series. Sesupone que k < n.
εt y ωt son dos vectores de n y k variables aleatorias, tales que:[εtωt
]∼ NID
[0,
(Σε 00 Σω
) ]. (2.15)
Igual que ocurrıa en los modelos de tendencias comunes, este modelo no es identi-ficable ya que la matriz A y el vector st no estan unıvocamente determinados. Para queel modelo este identificado se pueden anadir las mismas restricciones que se utilizan enlos modelos de tendencias comunes. En este caso se pueden concretar en la restriccion(2.7) y en que los k factores sean ortogonales, de forma que Σω sea una matriz diagonal.
En este caso, el filtro S(L) se ha utilizado para definir el comportamiento de losk factores estacionales. La estructura de este filtro implica que, con datos mensuales(S = 12), cada uno de esos factores presenta 11 raıces unitarias estacionales. Por lotanto, cada uno de estos factores seguira un fuerte comportamiento estacional. Para de-finir el comportamiento de los factores, se podrıan haber propuesto otros tipos de filtrosestacionales, pero no se ha encontrado a priori ningun motivo para inclinarse por otrofiltro y el que aquı se ha utilizado ha sido considerado en muchos trabajos anteriorescomo filtro estacional (Unas veces explıcitamente y otras de forma implıcita al utilizar∆S = [1− LS ]) y tiene la ventaja de permitir las comparaciones de resultados.
14 CAPITULO 2. MODELOS DE FACTORES COMUNES
Ademas, la definicion de los factores se ha hecho de manera que refleja un compor-tamiento puramente estocastico, es decir, no incluye una parte determinista2. Si se deseaintroducir una parte determinista en la estructura de los factores estacionales, una formade hacerlo es incluir S variables ficticias en la segunda ecuacion del modelo y anadiruna restriccion sobre los coeficientes:
S(L) st =S∑j=1
γjDjt + εt (2.16)
conS∑j=1
γj = 0 (2.17)
La restriccion (2.17) es necesaria, ya que si no se considerara, la suma de los com-ponentes estacionales deterministas serıa distinta de cero y, por tanto, existirıa una ten-dencia determinista, cuando al principio se ha supuesto que los componentes del vectoryt no tienen tendencia.
2Lo mismo ocurre en el modelo de tendencias comunes cuando β = 0.

2.4. MOD. DE TENDENCIAS Y FACTORES ESTAC. COMUNES 15
2.4. Modelos de tendencias y factores estacionales comunes
Si se tiene en cuenta la posibilidad de presentar factores comunes en la tendencia yen el componente estacional, se puede plantear el siguiente modelo3:
ytn× 1
= An× k
µtk × 1
+ Bn×m
stm× 1
+ εtn× 1
(2.18)
S(L) st = ωt (2.19)
µt = µt−1 + β + ηt (2.20)
donde:
β es un vector de constantes.
Cada elemento de µt es un componente de tendencia que sigue un paseo aleatoriocon rumbo.
A es la matriz de ponderaciones de los factores de tendencia.
st es un vector que recoge los m factores estacionales.
B es la matriz de pesos de los factores de estacionales.
εt, ωt y ηt son vectores de variables aleatorias de dimensiones n, m y k respecti-vamente, tales que:
εtωtηt
∼ NID 0,
Σε 0 00 Σω 00 0 Ση
.Este modelo es una generalizacion del propuesto por Fernandez Macho (1986), don-
de ahora se permite que la matriz de ponderaciones de los factores de tendencia seadistinta de la matriz de pesos de los factores estacionales.
Para que el modelo este identificado es necesario imponerle algunas restricciones:una posibilidad es construir la matriz A de forma que este constituıda por las primerask columnas de una matriz triangular hacia abajo y la matriz B por las m primeras co-lumnas de una matriz triangular hacia abajo. Si ademas se supone que todos los factoresson ortogonales entre sı, se tendra que Ση y Σω son matrices diagonales, y ası el modelosera identificable.
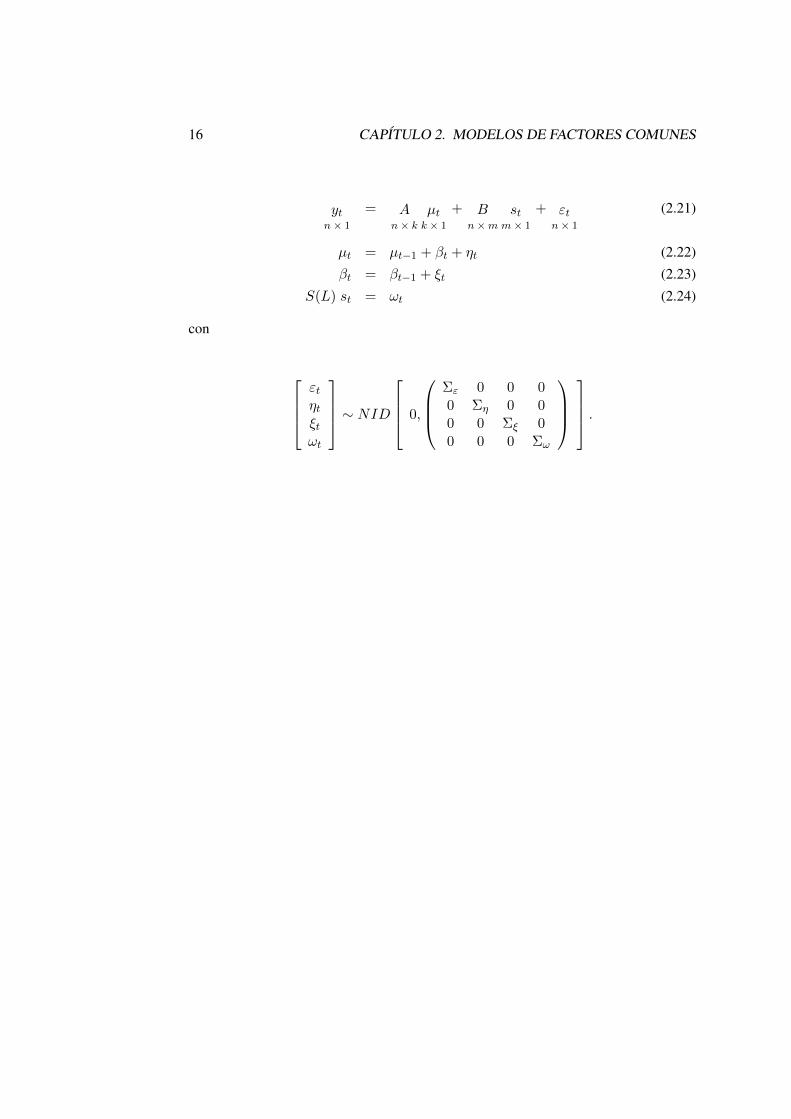
Si se desea permitir que la pendiente de la tendencia cambie de manera aleatoria a lolargo del tiempo, se debe incluir una ecuacion mas en el modelo quedando de la forma:
3Granger (1991) menciona un modelo similar a este aplicado a un problema bivariante.
16 CAPITULO 2. MODELOS DE FACTORES COMUNES
ytn× 1
= An× k
µtk × 1
+ Bn×m
stm× 1
+ εtn× 1
(2.21)
µt = µt−1 + βt + ηt (2.22)
βt = βt−1 + ξt (2.23)
S(L) st = ωt (2.24)
con
εtηtξtωt
∼ NID 0,
Σε 0 0 00 Ση 0 00 0 Σξ 00 0 0 Σω
.
Capıtulo 3
Cointegracion y factores comunes
3.1. Introduccion
Cuando se analiza a lo largo del tiempo la evolucion de una variable determinada,se suelen apreciar movimientos notables en su trayectoria. Sin embargo, si se conside-ran dos series temporales, algunas veces se puede esperar que no difieran o se apartendemasiado la una de la otra. La teorıa economica suele proponer modelos en los que serecogen las fuerzas que se activan para que las series se mantengan unidas. Es facil en-contrar ejemplos, como: tipo de interes a corto y a largo plazo, renta disponible y gastode las economıas domesticas, precios del mismo bien en diferentes mercados, o preciosde bienes sustitutivos en el mismo mercado, etc.
Engle y Granger (1987) intentaron formalizar la idea de equilibrio1 entre distintasseries economicas, introduciendo el concepto de cointegracion entre series temporales.A partir de este artıculo el desarrollo de la teorıa sobre series cointegradas ha sido verti-ginoso.
Una de las cuestiones derivada de estos trabajos, que ha ido desarrollandose hastala actualidad, ha sido la de integracion y cointegracion en diferentes frecuencias, conespecial enfasis en las frecuencias estacionales. A este respecto, merece la pena resaltarlos trabajos de Engle, Granger y Hallman (1989) (EGH), Lee (1992) y el de Hylleberg,Engle, Granger y Yoo (1990) (HEGY).
En el trabajo de EGH se establecen las definiciones de integracion y cointegracionen diferentes frecuencias, ası como una serie de propiedades para los estimadores deMınimos Cuadrados Ordinarios (MCO) de las ecuaciones cointegrantes, tanto de la fre-cuencia cero como de las frecuencias estacionales.
Por otro lado, el artıculo de HEGY (1990) establece un metodo para contrastar laexistencia de raıces unitarias en las frecuencias estacionales que tiene la particularidad
1El termino equilibrio tiene muchos significados en Economıa y su uso en la literatura sobre cointegra-cion es muy distinto de la mayorıa de los usos que se le asignan en la Teorıa Economica. En la literatura decointegracion la existencia de equilibrio entre un conjunto de series significa que existe una relacion obser-vada que se mantiene durante un largo perıodo de tiempo. Esto no conlleva ninguna de las implicacionesteoricas habituales, como el vaciado de mercados o el pleno empleo ni implica que el sistema haya llegadoal estado estacionario.
17
18 CAPITULO 3. COINTEGRACION Y FACTORES COMUNES
de servir para hacer contrastes en cada una de las frecuencias por separado.Es importante tambien senalar la existencia de otro tipo de modelos, los modelos de
factores comunes (de los cuales se ha hablado ampliamente en el capıtulo anterior) quese ha demostrado que estan ıntimamente relacionados con el concepto de cointegracion.Se ha demostrado (Stock y Watson, 1988; King, Plosser, Stock y Watson, 1987) que si unconjunto de series estan cointegradas (en la frecuencia cero) entonces tienen tendenciascomunes (y viceversa). Tomando esto como base, uno de los objetivos de este capıtulosera comprobar si ocurre lo mismo en las frecuencias estacionales, es decir, demostrarque cuando un conjunto de series estan cointegradas estacionalmente, tienen factoresestacionales comunes (y viceversa).
Pero, antes de entrar en materia, se hace necesario presentar las definiciones de in-tegracion y cointegracion, tanto en el sentido original de Engle y Granger como en di-ferentes frecuencias. En la seccion 3.2 se presentan las definiciones fundamentales de laliteratura sobre cointegracion y cointegracion estacional. En la seccion 3.3 se estudia larelacion entre el concepto de cointegracion entre un conjunto de variables y el conceptode factor comun (o factores comunes) tanto en el componente de tendencia como en elestacional.

3.2. DEFINICIONES 19
3.2. Definiciones
Definicion 1. (Engle-Granger, 1987) Se dice que una serie xt sin componente determi-nista es integrada de orden d y se denota xt ∼ I(d) si, despues de diferenciarla d veces,se obtiene una serie con representacion ARMA estacionaria e invertible.
Entre las series que son I(0) y las series I(1) hay diferencias importantes. Engle yGranger mencionan que si xt es I(0) con media cero, entonces:
1. La varianza de xt es finita.
2. Una innovacion tiene solo un efecto transitorio sobre el valor de xt.
3. El espectro de xt, f(ω), tiene la propiedad de que 0 < f(0) <∞.
4. La duracion esperada de los intervalos entre cruces consecutivos de la serie con eleje x = 0 es finita.
5. Los coeficientes de autocorrelacion, ρk, decrecen uniformemente en magnitud pa-ra valores de k suficientemente grandes, de manera que su suma es finita.
Sin embargo, si xt es I(1) con x0 = 0, entonces:
1. La varianza de xt tiende a infinito cuando t tiende a infinito.
2. Una innovacion tiene un efecto permanente sobre el valor de xt, ya que xt es lasuma de todas las innovaciones anteriores.
3. El espectro de xt tiene aproximadamente la forma2 f(ω) = Aω−2 para valorespequenos de ω; esto implica que, en particular, f(0) =∞.
4. El intervalo de tiempo esperado entre cruces consecutivos de la recta x = 0 esinfinito.
5. Los coeficientes de correlacion teoricos, ρk, tienden a uno, para todo k, cuando ttiende a infinito.
Definicion 2. (Engle y Granger, 1987) Los componentes del vector xt se dice que soncointegrados de ordenes d, b, y se denota xt ∼ CI(d, b), si:
i) Todos los componentes de xt son I(d) y
ii) existe un vector α ( 6= 0) tal que zt = α′xt ∼ I(d− b), con b > 0. Al vector α sele denomina vector cointegrante.
2La transformada de Fourier de (1 − L)dxt es f(ω) = c · (senω/2)−2d lo que, para valores pequenosde ω (senω/2 ≈ ω/2), da f(ω) = c/2 ω−2d.
20 CAPITULO 3. COINTEGRACION Y FACTORES COMUNES
Si se trabaja con series de datos recogidos a intervalos inferiores al ano (p.ej. men-suales o trimestrales), suele hacer falta tomar un cierto numero de diferencias de ordenuno para conseguir hacerlas estacionarias, y de esta forma es facil introducir inadverti-damente un componente de medias moviles no invertible en la representacion de la serie.Hablando en el sentido de la definicion 1 de Engle-Granger, las series de este tipo noserıan integradas de ningun orden. Por ello se hace necesaria la introduccion de nuevasdefiniciones, que sean aplicables a datos de periodicidad inferior al ano y sirvan ası paraaclarar este punto. Estas definiciones las aportan Engle et al (1989):
Definicion 3. (Engle, Granger y Hallman, 1989) Se dice que una serie xt es integradade orden d en la frecuencia θ, y se denota xt ∼ Iθ(d), si xt tiene un espectro f(ω) quetoma la forma:
f(ω) = c(ω − θ)−2d (3.1)
para valores de ω cercanos a θ.
Definicion 4. (EGH, 1989) Si la serie xt es generada por
S(L)dxt = C(L)εt + µ (3.2)
donde S(L) = (1 + L+ L2 + · · ·+ LS−1) (3.3)
y el espectro de C(L)εt tiene una cota superior c, con 0 < c < ∞ para todas lasfrecuencias estacionales, entonces se dice que xt es integrada estacionalmente de ordend, con rumbo si µ 6= 0, y se denota xt ∼ SI(d). (Tambien se suele llamar integracionestacional uniforme).
Definicion 5. (EGH, 1989) Se dice que un vector xt, formado por series temporales, escointegrado en la frecuencia θ si:
a) Cada componente de xt es Iθ(d).
b) Existe un vector αθ tal que zt = α′θ xt es integrada de orden menor que d en lafrecuencia θ.
Como ayuda, para aclarar algunos detalles posteriores, se anade aquı la definiciondel concepto de cointegracion estacional uniforme.
Definicion 6. Se dice que un vector xt formado por series temporales es estacional yuniformemente cointegrado, y se denota SC(d, b) si:
Cada componente de xt es SI(d).
Existe al menos un vector α∫ 6= 0 tal que zt = α′∫ xt es integrada estacionalmente(y uniformemente) de orden (d - b), con b > 0.
Como se puede apreciar, la cointegracion estacional uniforme supone que existecointegracion en cada una de las frecuencias estacionales y que el vector cointegranteαθ es el mismo para todas ellas.
3.3. RELACION ENTRE COINTEGRACION Y FACTORES COMUNES 21
3.3. Relacion entre cointegracion y factores comunes
3.3.1. Modelos con tendencias comunes
La relacion entre el concepto de tendencia comun y el de cointegracion ha sidoestudiada por King et al (1987); Stock y Watson (1988) y Fernandez Macho (1986).Fernandez Macho senala que un modelo de tendencias comunes como el descrito en elcapıtulo anterior,
ytn× 1
= An× k
µtk × 1
+ εtn× 1
t = 0, 1, . . . , T. (3.4)
µt = µt−1 + β + ηt (3.5)
con
[εtηt
]∼ NID
[0,
(Σε 00 Ση
) ], (3.6)
es adecuado cuando se consideran dos o mas variables relacionadas de manera queevolucionan en forma similar a lo largo del tiempo. O, en otras palabras, parecen seguirtendencias comunes.
Aunque separadamente cada una de estas series necesite ser diferenciada para trans-formarla en estacionaria, diferenciar una serie temporal multiple como yt no sera apro-piado si se sospecha la existencia de factores comunes. En general, al hacer esto seimpondrıan mas raıces unitarias de las necesarias sobre el vector yt y solo se podrıanestudiar las relaciones entre sus incrementos, mientras que se perderıan, en gran parte,las relaciones entre los niveles de las series. Suponiendo que haya k tendencias comunes(con k < n) solo deberıan imponerse al vector y k raıces unitarias.
Considerese el modelo (3.4-3.5); como la matriz de pesos A es de rango completo(k), si denominamos A a la matriz complemento ortogonal de A en una base de Rn, Atambien sera de rango completo (n− k) y sus columnas seran ortogonales a las de A, esdecir: A′A = 0.
Entonces, si se multiplica la ecuacion (3.4) por A:
A′yt = A′εt = νt para t = 0, 1, . . . , T. (3.7)
dondeνt ∼ NID(0, A′ΣεA)
Esto significa que existen n− k combinaciones lineales de las variables observadas,para las cuales los componentes de tendencia se cancelan; aun cuando cada uno de los nelementos del vector yt tiene una raız unitaria (en la frecuencia cero). En los terminos dela definicion 2 de Engle y Granger, esto significa que las variables que forman el vector
22 CAPITULO 3. COINTEGRACION Y FACTORES COMUNES
yt estan cointegradas y los vectores cointegrantes son, precisamente, las n − k filas dela matriz A′.
En este caso, esto implica que las series que constituyen el vector yt en (3.4) soncointegradas de ordenes (1, 1), C(1, 1).
La inversa tambien es cierta. King et al (1987) y Stock y Watson (1988) han demos-trado que los datos generados por un proceso yt multivariante cointegrado, con n − kvectores cointegrantes linealmente independientes, pueden ser representados como com-binaciones lineales de k variables con tendencia (paseos aleatorios) mas n− k variablesestacionarias.
3.3.2. Modelos con factores comunes estacionales
Sea yt un vector compuesto por n series temporales que siguen un modelo de facto-res comunes de la forma:
ytn× 1
= An× k
stk × 1
+ εtn× 1
(3.8)
S(L) st = ωt (3.9)
donde:
st es un vector formado por k factores estacionales comunes a las n series. Sesupone que k < n.
S(L) es el operador definido en (3.3);
A es la matriz de pesos de los factores (de rango k),
εt es un vector de variables aleatorias NID(0,Σε) y ωt es un vector NID(0,Σω)
De aquı en adelante, supondremos que se cumplen las restricciones de identificacionsenaladas en (2.7).
Proposicion 1. Sea yt = (y1t, . . . , ynt)′ un vector formado por n series temporales. yt
es cointegrado estacionalmente y unicamente de forma uniforme3 si y solo si el vectoryt sigue una representacion de factores comunes estacionales como la siguiente:
ytn× 1
= An× k
stk × 1
+ atn× 1
(3.10)
S(L) st = ωt (3.11)
3Esto significa que es cointegrado estacionalmente solo de manera uniforme, es decir, existe al menosun vector α∫ tal que α′∫yt es SI(0) pero no existe ningun vector α que sea vector cointegrante solo paraalgunas frecuencias.
3.3. RELACION ENTRE COINTEGRACION Y FACTORES COMUNES 23
siendo at y ωt procesos vectoriales independientes SI(0), es decir, procesos tales quesu matriz de densidad espectral tiene determinante finito, no nulo, para las frecuenciasestacionales.
Demostracion. (Condicion suficiente)Si se multiplica la primera ecuacion del modelo (3.10) por S(L), para cada uno de loscomponentes de yt se obtiene:
S(L) yit = Ai ωt + S(L) ait i = 1, . . . , n.
siendo Ai la fila i-esima de la matriz A y ait el elemento i-esimo del vector at.Supongamos que Ω es la matriz de varianzas y covarianzas de ωt. Dado que ωt es
SI(0), vt = Ai ωt tambien es SI(0), su varianza es AiΩA′i y su funcion de densidadespectral fv(λ) toma valores no nulos (y finitos) para las frecuencias estacionales, esdecir, para λ = 2πj/S con j = 1, . . . , S − 1.
Por otra parte, como ait es un proceso SI(0), S(L) ait es un proceso con S − 1raıces unitarias (correspondientes a las frecuencias estacionales) en su representacion demedias moviles y, por tanto (Ver Lutkepohl, 1987, p.13) su funcion de densidad espectralfS(L)ai(λ) toma valor cero en cada una de estas frecuencias.
Como consecuencia de todo esto, la funcion de densidad espectral de S(L) yit, quees:
fS(L)yi(λ) = fv(λ) + fS(L)ai(λ)
toma valores distintos de cero para las frecuencias estacionales, entonces el procesoS(L) yit no presenta raıces unitarias en su representacion MA y, por tanto, es SI(0).Esto necesariamente implica que el proceso yit, ∀i : 1, . . . , n, es SI(1).
Sea A una matriz complemento ortogonal de A en Rn, si se multiplica la ecuacion(3.10) por la izquierda por la traspuesta de esta matriz, se obtiene
A′yt = A′at = ut
siendo ut un proceso SI(0). Por tanto, yt es un vector formado por n elementos que sonSI(1), pero existen n−k combinaciones lineales de todos ellos A′yt que son integradasde orden cero en su componente estacional.
Por lo tanto, en este caso yt es cointegrado estacional y uniformemente SC(1, 1), yademas los vectores cointegrantes son las n− k filas de la matriz A′.
Demostracion. (Condicion necesaria)Sea yt un vector (n× 1) de series temporales que es cointegrado estacional y uniforme-mente SC(1, 1), siendo r el rango de cointegracion y α la matriz n × r que contienecomo vectores columna los r vectores cointegrantes. Cada elemento de yt es SI(1), peroexisten r combinaciones lineales de los elementos de yt que son SI(0). Siempre existepara yt una representacion de Wold multivariante4:
S(L) yt = C(L) εt con∞∑j=1
j |Cj | <∞ (3.12)
4Ver Hannan (1970, p.66) o Engle y Granger (1987, p. 256) para el caso de cointegracion en la frecuen-cia cero.

24 CAPITULO 3. COINTEGRACION Y FACTORES COMUNES
donde C(z) =∑∞
i=0Cizi con C(0) = In (matriz identidad). εt es iid con media
cero y matriz de varianzas y covarianzas G. Si λ1, λ2, . . . , λS−1 son las S − 1 raıcesunitarias estacionales del polinomio S(L), entonces C(λ1), . . . , C(λS−1) son de rango5
k = n− r, igual para todas ellas. Si yt es SC(1, 1)6, existe una matriz α de orden n× rtal que α′C(λ1) = 0, α′C(λ2) = 0, ..., α′C(λS−1) = 0, es decir, C(λ1),..., C(λS−1)pertenecen al Ker(α′) (o espacio nulo de α′). Ademas, al ser k+ r = n, las r columnaslinealmente independientes de cualquiera de las matrices C(λj), por ejemplo las deC(λ1), forman una base del espacioKer(α′) y el resto de los C(λj) se pueden expresarcomo combinaciones lineales de C(λ1), es decir:
C(λ2) = C(λ1)B2,C(λ3) = C(λ1)B3,· · ·
C(λS−1) = C(λ1)BS−1
(3.13)
siendoB2, . . . , BS−1 las matrices n×n de ponderaciones. Estas matrices no son unicas,pero siempre es posible elegir un grupo de matrices que presenten rango completo n.Por ejemplo, veamoslo para B2. Como C(λ1) es de rango reducido k, se puede expresarcomo (Ver, por ejemplo Johansen, 1988):
C(λ1) = Dn× k
Ξ1k × n
=
[D
... 0n× (n− k)
]·[
Ξ1
Θ1
]n× n
(3.14)
teniendo D y Ξ1 rango k. Θ1 es una matriz cualquiera de orden (n − k) × n, entonces
se puede seleccionar esta matriz de forma que[
Ξ1
Θ1
]tenga rango completo n. Dado
que los vectores columna de D forman una base del subespacio de Rn Ker(α′), C(λ2)se puede expresar:
C(λ2) = Dn× k
Ξ2k × n
=
[D
... 0n× (n− k)
]·[
Ξ2
Θ2
]n× n
(3.15)
donde Ξ2 tambien tiene rango k y Θ2 se puede elegir de manera que[
Ξ2
Θ2
]tenga rango
completo n. De la ecuacion (3.14) se obtiene:[D
... 0n× (n− k)
]= C(λ1)
[Ξ1
Θ1
]−1que sustituyendo en (3.15) queda:
C(λ2) = C(λ1)
[Ξ1
Θ1
]−1 [Ξ2
Θ2
]5Por el Teorema de Representacion de Granger, seccion 1 (Engle y Granger, 1987), perfectamente
aplicable al caso estacional.6Por el mismo Teorema, seccion 2.

3.3. RELACION ENTRE COINTEGRACION Y FACTORES COMUNES 25
Dado que[
Ξ1
Θ1
]−1y[
Ξ2
Θ2
]tienen rango completo n, su producto tambien lo tie-
ne y, por tanto, hemos encontrado al menos una matriz con rango completo n, B2 =[Ξ1
Θ1
]−1·[
Ξ2
Θ2
]tal que C(λ2) = C(λ1)B2.
Lo mismo se puede hacer para el resto de las matrices de la expresion (3.13) demanera que dispongamos de un conjunto de matrices de ponderaciones B2, ..., BS−1todas ellas con rango n.
Sea νt = G−1/2εt y ξt =∑N
r=1 νSr+m, donde N es la parte entera de (t/S),es decir, el numero de anos transcurridos, y m = t − S N , o sea, un numero enterom ∈ 0, 1, 2, . . . , S−1 que indica el perıodo del ano en que se encuentra la observaciont. Supongamos, por convencion (Ver Dickey y Fuller, 1979) que εj = 0 para j ≤ 0y que yt tiene unos valores iniciales fijos y−(S−1), y−(S−2), . . . , y−1, y0. Sustituyendorecursivamente en (3.12) se obtiene:
yt = y−m + C(L)(1− L)
N∑r=1
εSr+m (3.16)
C(L) se puede escribir como (Ver Hylleberg et al, 1990; Dolado, 1990):
C(L) = C(λ1) z1(L)/z1(λ1) + C(λ2) z2(L)/z2(λ2) + · · ·++C(λS−1) zS−1(L)/zS−1(λS−1) + C∗(L)S(L) (3.17)
donde λ1, . . . , λS−1 son las S−1 raıces unitarias del polinomio S(L), zj(L) = S(L)/(1−(1/λj)L) para j = 1, . . . , S − 1 y C∗(L) tiene todas sus raıces estacionales fuera delcırculo unidad.
Entonces, la ecuacion (3.16) se puede escribir:
yt = y−m +(1− L) [C(λ1) z1(L)/z1(λ1) + C(λ2) z2(L)/z2(λ2)+
+ · · ·+ C(λS−1) zS−1(L)/zS−1(λS−1)]G1/2ξt +
+(1− LS)C∗(L)
N∑r=1
εSr+m (3.18)
y, por tanto, teniendo en cuenta (3.13),
yt = y−m + C(λ1)(1− L)M(L)G1/2ξt + C∗(L)G1/2νt (3.19)
siendo M(L) =[z1(L)z1(λ1)
I + z2(L)z2(λ2)
B2 + · · ·+ zS−1(L)zS−1(λS−1)
BS−1
].
Como C(λ1) tiene rango k < n, esto implica que existe una matriz H1 de ordenn × r y rango r tal que C(λ1)H1 = 0. Si H2 es una matriz n × k de rango k ycolumnas ortogonales a las de H1, entonces A ≡ C(λ1)H2 tiene rango k. La matriz
H = (H1... H2) es no singular y multiplicandola por la izquierda por C(λ1) se obtiene:
C(λ1)H = (0... A) = ASk

26 CAPITULO 3. COINTEGRACION Y FACTORES COMUNES
siendo Sk la matriz de seleccion de orden (k × n): Sk =
(0
k × (n− k)
... Ikk × k
).
La ecuacion (3.19) se puede expresar:
yt = y−m + C(λ1)H[H−1 (1− L)M(L)
]G1/2 ξt + C∗(L)G1/2νt (3.20)
yyt = y−m +ASk
[H−1 (1− L)M(L)
]G1/2 ξt + C∗(L)G1/2νt, (3.21)
proporcionando una representacion de factores estacionales comunes para yt que se pue-de escribir como:
yt = β +Ast + at (3.22)
siendo
β = y−m,
st = Sk[H−1 (1− L)M(L)
]G1/2 ξt,
y at = C∗(L)G1/2νt
Dada la estructura de st se cumple que
st = Sk[H−1 (1− L)M(L)
]G1/2
N∑r=1
νSr+m =
= Sk[H−1 (1− L)M(L)
]G1/2
N−1∑r=1
νSr+m +
+Sk[H−1 (1− L)M(L)
]G1/2 νt
es decir,st = st−S + (1− L)Sk
[H−1M(L)
]G1/2 νt
y, por tanto,S(L) st = ωt
siendoωt = SkH
−1M(L)G1/2 νt. (3.23)
Para demostrar que ωt es un proceso vectorial SI(0), desarrollaremos a continuacionsu matriz de densidad espectral.
Como z1(λ1), . . . , zS−1(λS−1), terminos que participan en M(L), son escalares,podemos redefinir las matrices B2, . . . , BS−1 de manera que incluyan los terminos1/z2(λ2), . . . , 1/zS−1(λS−1) y definir ϑ = 1/z1(λ1) y Ψ = SkH
−1, la ecuacion (3.23)queda entonces:
ωt = Ψ[ϑ z1(L) In + z2(L)B∗2 + · · ·+ zS−1(L)B∗S−1
]εt (3.24)

3.3. RELACION ENTRE COINTEGRACION Y FACTORES COMUNES 27
Sabemos, por hipotesis, que εt ∼ NID(0, G), por tanto,
δ1t = Ψϑ εt ∼ NID(0, (ψ ϑ)G (ψ ϑ)′
)y δjt = ΨB∗j εt ∼ NID
(0, (ψB∗j )G (ψB∗j )′
)para j = 2, . . . , S − 1.
Las matrices de varianzas y covarianzas de δ1t, . . . , δS−1,t son todas definidas posi-tivas ya que las B∗j tienen rango completo n, Ψ que es de orden (k × n) tiene rango k ylas (ΨB∗j ) = SkH
−1B∗j tambien tienen rango k.La matriz de densidad espectral de εt es (Hannan, 1970):
fε(λ) = (2π)−1G
por tanto,fδ1(λ) = (2π)−1(Ψϑ)G (Ψϑ)′
yfδj (λ) = (2π)−1(ΨB∗j )G (ΨB∗j )′ para j = 2, ..., S − 1.
Tomando como base la ecuacion (3.24) se puede obtener la matriz de densidad es-pectral de ωt:
fω(λ) = (2π)−1(|z1(e−iλ)|2 (Ψϑ)G (Ψϑ)′+
+|z2(e−iλ)|2 (ΨB∗2)G (ΨB∗2)′ +
· · · · · · · · ·+|zS−1(e−iλ)|2 (ΨB∗S−1)G (ΨB∗S−1)
′)
Para toda frecuencia estacional λj con j = 1, . . . , S−1, los polinomios |zı(e−iλ)|2ı 6=jse hacen cero, pero el polinomio |zj(e−iλ)|2 es distinto de cero. Dado que todas lasmatrices de varianzas y covarianzas tienen rango completo, la asociada a δj tambien lotiene y por tanto fω(λj) tiene rango completo, lo cual implica (Ver Lutkepohl, 1987,p.13) que ω no presenta raız unitaria en la frecuencia λj para j = 1, . . . , S − 1 y, portanto, ωt es SI(0).
3.3.3. Modelos con tendencias y factores estacionales comunes
Sea yt un vector compuesto por n series temporales que siguen un modelo de ten-dencias y factores estacionales comunes de la forma:
ytn× 1
= An× k
µtk × 1
+ Bn×m
stm× 1
+ εtn× 1
(3.25)
µt = µt−1 + βk × 1
+ ηtk × 1
(3.26)
S(L) st = ωtm× 1
(3.27)

28 CAPITULO 3. COINTEGRACION Y FACTORES COMUNES
donde ahora µt es un componente de tendencia que sigue un paseo aleatorio con rumbo,β es un vector de constantes y ηt es una variable aleatoria NID(0,Ση).
Multiplicando la ecuacion (3.25) por S(L), para un elemento i cualquiera del vectoryt se obtiene:
S(L) yit = Ai S(L)µt +Bi ωt + S(L) εit = uit (3.28)
siendo uit un proceso que no tiene raıces unitarias en las frecuencias estacionales [esSI(0)], por lo tanto, cada componente de yt es SI(1).
Si se multiplica esa i-esima ecuacion por (1− L):
(1− L) yit = Ai β +Ai ηt +Bi (1− L) st + (1− L) εit = rt (3.29)
donde rt es un proceso sin raız unitaria en la frecuencia cero [I0(0)], es decir, cadaelemento de yt es I0(1).
Supongamos que A es una matriz complemento ortogonal de A y B es un comple-mento ortogonal deB, esntonces, si se multiplica la ecuacion (3.25) por la izquierda porA′, se obtiene:
A′ yt = A′B st + A′ εt (3.30)
donde st y, por tanto, A′B st, es una variable que no tiene raıces unitarias en la frecuen-cia cero (solo las tiene en las frecuencias estacionales) y A′ εt es un vector de variablesaleatorias NID ∼ (0, A′Σε A) estacionarias. Esto implica que A′yt no tiene raıces uni-tarias en la frecuencia cero y, por tanto, el vector yt es cointegrado de tipo C(1, 1) endicha frecuencia. Los vectores cointegrantes son las n− k filas de la matriz A′.
Si, en cambio, se multiplica la ecuacion (3.25) por la izquierda por B′ se obtiene:
B′ yt = B′Aµt + B′ εt. (3.31)
En tal caso, se comprueba que B′Aµt tiene una raız unitaria que corresponde a lafrecuencia cero, pero no tiene raıces unitarias en las frecuencias estacionales, y B′ εt esun vector de variables NID(0, B′Σε B) estacionario. Por lo tanto, B′yt no tiene raıcesunitarias en las frecuencias estacionales [es SI(0)], lo cual implica que yt es un vectorcointegrado SC(1, 1). En este caso los vectores cointegrantes son las n −m filas de lamatriz B′.
En algunos casos, es posible conseguir cointegracion simultanea en la frecuenciacero y en las frecuencias estacionales con los mismos vectores cointegrantes7 como sepuede ver en la siguiente proposicion.
Proposicion 2. (Condicion para Cointegracion completa) Sea el modelo definido porlas ecuaciones (3.25), (3.26) y (3.27) y supongamos, sin perdida de generalidad, quek ≥ m. Si existe una matriz C de orden (k × m) y de rango m tal que A · C = B,entonces hay cointegracion completa.
7Es lo que Granger (1991) denomina cointegracion completa (Full cointegration).

3.3. RELACION ENTRE COINTEGRACION Y FACTORES COMUNES 29
Demostracion. Supongamos que k ≥ m, si todas las columnas de la matriz B soncombinaciones lineales de las columnas de la matriz A; es decir, si existe una matriz Ctal que A · C = B, entonces al multiplicar la ecuacion (3.25) por A′ se obtiene:
A′yt = A′Aµt + A′B st + A′ εt = A′AC st + A′ εt = A′ εt
siendo A′ εt un vector NID ∼ (0, A′Σε A) y, por tanto, sin raıces unitarias en la frecuen-cia cero ni en las estacionales. En este caso, el vector yt es cointegrado simultaneamenteen la frecuencia cero y en las estacionales, los vectores cointegrantes son las n− k filasde la matriz A′ y son comunes a todas las frecuencias.

30 CAPITULO 3. COINTEGRACION Y FACTORES COMUNES

Capıtulo 4
Contrastes de raıces unitarias y decointegracion
4.1. Introduccion
Las series de datos temporales, tanto ajustadas como no ajustadas estacionalmente,suelen ser no estacionarias. En los ultimos anos, muchos de los autores que analizanseries temporales han centrado su atencion en la estimacion y contrastes de modelos pa-rametricos de procesos con tendencia. A lo largo de la ultima decada se ha desarrolladode forma notable la literatura relacionada con los contrastes de raıces unitarias, contras-tes de cointegracion, factores comunes, etc. De manera que ahora se entienden mejorlos efectos de las tendencias deterministas y estocasticas y se conocen algunas formasde tener en cuenta su influencia sobre la distribucion de los parametros estimados y loscontrastes. La presencia de estacionalidad en las series de datos temporales tiene comoconsecuencia un conjunto de complicaciones anadidas. En los ultimos anos se esta avan-zando en temas basicos, como contrastes de no estacionariedad y tendencias comunes,en el contexto de procesos estacionales no estacionarios.
La teorıa sobre conjuntos de variables cointegrados ha relanzado el interes por loscontrastes de raıces unitarias. Se suelen utilizar estos contrastes, en primer lugar, paradeterminar el orden de integracion de cada variable y, en segundo lugar, para analizarlos residuos de las ecuaciones cointegrantes, determinar su orden de integracion y ası laexistencia o no de cointegracion en el conjunto de series estudiado.
En el presente capıtulo se lleva a cabo una revision de los contrastes de raıces unita-rias y de cointegracion mas utilizados. En la seccion 4.2 se estudian los contrastes masclasicos de raıces unitarias en la frecuencia cero. En la seccion 4.3 se comentan algunoscontrastes de cointegracion en dicha frecuencia, y en la seccion 4.4 se analizan variostipos de contrastes de raıces unitarias estacionales.
31

32 CAPITULO 4. CONTRASTES DE R.U. Y DE COINTEGRACION
4.2. Contrastes de raıces unitarias en la frecuencia cero
A partir de la aparicion de los conceptos de integracion y cointegracion se aprecio lanecesidad de disponer de un contraste que ayude a decidir el orden de integracion deuna serie. A este respecto la propuesta de Engle y Granger fue utilizar los contrastesde Dickey y Fuller (1979). Aunque la literatura sobre contrastes de raıces unitarias haavanzado enormemente desde entonces, aun ahora uno de los metodos de contraste masutilizados es el contraste de Dickey y Fuller aumentado (ADF).
4.2.1. Contrastes de Dickey y Fuller
Dickey y Fuller (1979) analizan tres tipos de modelos:
i) yt = α yt−1 + ut
ii) yt = C + α yt−1 + ut
iii) yt = C + β t+ α yt−1 + ut
Como se puede apreciar, el modelo i) no admite constante ni tendencia determinista, enel ii) solo se admite la presencia de constante y en el iii) se admite una constante y unatendencia determinista lineal.
Consideran, en los tres modelos, la hipotesis nula de que α = 1 y utilizan el es-tadıstico t para efectuar el contraste (se le suele denominar estadıstico DF). Dado queen las tres ecuaciones interviene una variable endogena retardada, que bajo la hipotesisnula presenta una raız unitaria, la distribucion de ese estadıstico no es una t de Student.Dickey y Fuller se encargan, por medio de simulaciones, de hallar los valores crıticosde la distribucion empırica de este estadıstico. Esos valores estan recogidos en Fuller(1976, tabla 8.5.2, pag.373.).
El estadıstico DF calculado en cualquiera de las tres ecuaciones es valido cuandola alternativa es un modelo autorregresivo de orden uno estacionario y la hipotesis nulaes un modelo como el i), ii) o iii) con α = 1. Sin embargo, cuando se espera que laserie contenga mas de una raız unitaria, o la alternativa es un proceso AR de ordenmayor que uno, o un proceso de medias moviles, el procedimiento aquı descrito no serıavalido. Por ello, Dickey y Fuller consideran la posibilidad de que yt siga un procesoARMA(p′, q) estacionario e invertible. Teniendo en cuenta que todo proceso ARMAde este tipo puede ser aproximado mediante un proceso autorregresivo puro AR(p) deun orden p suficientemente elevado, postulan que:
ut =
p∑i=2
δi yt−i + εt (4.1)
donde E(εt) = 0 y E(ε′ε) = σ2 I .Se pueden reescribir, por tanto, los tres modelos considerados antes, de la siguiente

4.2. CONTRASTES DE RAICES UNITARIAS EN LA FRECUENCIA CERO 33
manera:
i) yt = α yt−1 +
p∑i=2
δi yt−i + εt
ii) yt = C + α yt−1 +
p∑i=2
δi yt−i + εt
iii) yt = C + β t+ α yt−1 +
p∑i=2
δi yt−i + εt
Para determinar el valor de p sugieren que se incluyan tantos retardos como sean nece-sarios para eliminar la autocorrelacion.
La hipotesis nula en estos modelos es que α = 1. Para contrastar esta hipotesis seutiliza el estadıstico t pero, para facilitar los calculos, se suele reparametrizar el modelosustrayendo yt−1 en ambos lados de las ecuaciones, obteniendo:
i) ∆yt = µ yt−1 +
p∑i=2
γi ∆yt−i + εt (4.2)
ii) ∆yt = C + µ yt−1 +
p∑i=2
γi ∆yt−i + εt (4.3)
iii) ∆yt = C + β t+ µ yt−1 +
p∑i=2
γi ∆yt−i + εt (4.4)
Ahora la hipotesis nula, para cualquiera de los tres modelos, es µ = 0, y para con-trastarla se utiliza el estadıstico t muestral (que se suele denominar ADF, estadıstico deDickey-Fuller aumentado). La distribucion del estadıstico ADF es la misma que la delestadıstico DF. Los valores crıticos estan recogidos en la tabla que se encuentra en Fuller(1976, sec. 8.5.2, pag.373).
Si el modelo que se considera adecuado es el i), los valores crıticos son los tabuladosen la parte (a) de la tabla. Si es el ii), lo apropiado es utilizar la parte (b), y si el modeloconsiderado es el iii), los valores crıticos figuran en la parte (c) de la misma.
4.2.2. Contraste de Bhargava
Bhargava (1986) desarrolla un contraste para la hipotesis nula de paseo aleatorio conrumbo. Este contraste es valido para muestras pequenas.
El modelo que considera bajo la hipotesis nula es:
yt = C + yt−1 + ut (4.5)
y el modelo alternativo es:
yt = C + α yt−1 + ut con |α| < 1 (4.6)
34 CAPITULO 4. CONTRASTES DE R.U. Y DE COINTEGRACION
Bhargava define el estadıstico R2 como:
R2 =
∑Tt=1(yt − yt−1)2 −
1T−1(yT − y1)2∑T
t=1 [(T − 1)yt − (t− 1)yT − (T − t)y1 − (T − 1) (y − 0,5(y1 + yT ))]2 /(T − 1)2
Los valores crıticos de este estadıstico al 5 % de significacion se pueden encontrar en elartıculo de Bhargava (1986, tabla 1, pag. 378). Bhargava comprueba queR2 es algo maspotente que los contrastes de Dickey-Fuller.
4.2.3. Contrastes de Phillips
Los contrastes desarrollados por Dickey y Fuller consideran que las innovaciones delmodelo nulo pueden ser autorregresivas, y aportan una solucion que valida la utilizacionde sus estadısticos en dicha situacion. Estos autores, sin embargo, suponen homocedas-ticidad en las innovaciones, lo cual puede limitar la aplicabilidad de estos contrastes,ya que es mas realista suponer que las perturbaciones pueden ser heterocedasticas. Phi-llips (1987) aporta una solucion a este problema, desarrollando unos contrastes de raıcesunitarias no parametricos, en los que se permite que las innovaciones del proceso seandebilmente dependientes y heterogeneamente distribuıdas. En este sentido, los contras-tes propuestos por Phillips gozan de una aplicabilidad mas general que los de Dickey yFuller.
4.3. Contrastes de Cointegracion en la frecuencia cero
Contrastar la existencia de un vector de cointegracion entre un conjunto de variablesequivale a contrastar la existencia de una raız unitaria en las perturbaciones de la ecua-cion cointegrante. Por lo tanto, se puede utilizar para ello cualquier contraste de raıcesunitarias. La unica diferencia estriba en que ahora se contrasta la presencia de una raızunitaria en una serie estimada (los residuos minimocuadraticos de la ecuacion cointe-grante), en lugar de en una serie observada. Por este motivo, los valores crıticos de estetipo de contrastes han de ajustarse al alza, ya que de otra forma el error de tipo I estarıaexagerado.
En la practica, los contrastes de cointegracion que mas se suelen utilizar son el basa-do en el estadıstico de Durbin y Watson [conocido como CRDW, Cointegrating regres-sion Durbin-Watson. Durbin y Watson (1950)] (Ver tambien Sargan y Bhargava, 1983) ylos contrastes de Dickey-Fuller en sus versiones simple y aumentada. Para un excelenteresumen sobre estos contrastes de cointegracion ver Dolado (1990).
Johansen (1988) presenta un metodo, basado en el modelo de correccion de error,para contrastar la existencia de cointegracion y decidir el numero de vectores cointe-grantes existentes entre un conjunto dado de series temporales.
Por ultimo hay que senalar que la literatura sobre contrastes de raıces unitarias haevolucionado enormemente desde la aparicion de los conceptos de integracion y cointe-gracion. A medida que avanza el tiempo van apareciendo metodos de contraste, cada vez

4.4. CONTRASTES DE R.U. EN LAS FRECUENCIAS ESTACIONALES 35
mas refinados, con el objetivo de llenar las lagunas que los anteriores metodos tenıan yde perfeccionarlos. En este sentido, es importante senalar la existencia de los estadısti-cos qµc y qµf de Stock y Watson (1988), basados en los modelos de tendencias comunes.Estos estadısticos tienen la ventaja de permitir la estructura tanto de procesos AR es-tacionarios como de medias moviles en las perturbaciones de la ecuacion cointegrante,aparte de la posible raız unitaria.
4.4. Contrastes de raıces unitarias en las frecuenciasestacionales.
Utilizar series sin desestacionalizar complica los contrastes de raıces unitarias tradi-cionales para la frecuencia cero y, sin embargo, desestacionalizarlas es potencialmentepeor, ya que si el componente estacional tiene raıces unitarias, el estimador de la tenden-cia y la serie ajustada estacionalmente son no invertibles y no aceptan una representacionautorregresiva, como demuestra Maravall (1992).
Cuando se desea contrastar la presencia de raıces unitarias en series que presentanestacionalidad, normalmente se suele centrar la atencion sobre un proceso generadorde datos caracterizado por una raız unitaria, posiblemente con rumbo, bajo la hipote-sis nula y un proceso estacionario, o un proceso estacionario mas una tendencia linealdeterminista, bajo la alternativa. Para series estacionales hay cuatro tipos de procesosgeneradores de datos que se han utilizado con bastante frecuencia. Con datos mensualesse definen como sigue:
(1− L)(1− L12) yt = η1t (4.7)
(1− L12) yt = a0 + η2t (4.8)
(1− L) yt =
12∑j=1
δj Dsjt + η3t (4.9)
yt = a1t+12∑j=1
δjDsjt + η4t (4.10)
Estas cuatro expresiones representan las caracterizaciones mas utilizadas de seriestemporales no estacionarias con estacionalidad. El proceso de seleccion de modelos seenfrenta con varias dificultades. Casos especiales de (4.7) a (4.10) pueden presentar lamisma estructura estocastica. Bell (1987) demuestra como cuando θ tiende a uno en laecuacion
(1− L)(1− L12) yt = (1− θL12) ηt
en el lımite se obtiene un modelo del tipo (4.9) con δj 6= 0 ∀j y tambien, si θ tiende auno en el modelo
(1− L12)yt = (1− θL12) ηt
se obtiene un modelo del tipo (4.10) con a1 = 0 y δj 6= 0 ∀j.

36 CAPITULO 4. CONTRASTES DE R.U. Y DE COINTEGRACION
Ası que segun una raız en la parte de medias moviles se acerca a la unidad, conuna raız unitaria de la misma frecuencia en la parte autorregresiva, se llega a un procesocon estacionalidad determinıstica. Se suelen aplicar argumentos similares, y quizas masconocidos, a las raıces de los polinomios autorregresivos, de forma que ası se distinguenlas tendencias estocasticas de las determinısticas.
En principio, los modelos (4.7), (4.8) y (4.9) tienen al menos una raız en la fronteradel cırculo unidad. La mayorıa de los contrastes considerados en la literatura utilizanel modelo (4.9) como hipotesis nula contra el (4.10) como alternativa (normalmentesin variables ficticias estacionales, ya que se utilizan datos no estacionales o ajustadosestacionalmente). Como los modelos (4.7) y (4.8) tienen al menos una raız unitaria, sepodrıa, en principio, considerar la aplicacion de tales contrastes para los datos generadospor estos modelos, pero hay que senalar que aquı se violan las condiciones de regulari-dad de los contrastes usuales de raıces unitarias, ya que la presencia de raıces unitariasestacionales provoca inconsistencia en los estimadores de las ecuaciones (4.2) o (4.3) deDickey-Fuller (Ver Engle et al, 1989, pag. 50).
El polinomio (1− L12) puede factorizarse como
(1− L)(1 + L)(1 + iL)(1− iL)(
1 + (√
3 + i)L/2)(
1 + (√
3− i)L/2)
(1− (
√3 + i)L/2
)(1− (
√3− i)L/2
)(1 + (i
√3 + 1)L/2
)(1− (i
√3− 1)L/2
)(
1− (i√
3 + 1)L/2)(
1 + (i√
3− 1)L/2)
(4.11)
ası que cuando (4.7) o (4.8) son los verdaderos procesos generadores de los datos esinadecuado suponer bajo la hipotesis nula (4.9) que todas las raıces de la parte ARson estacionarias (y reales). Se han desarrollado contrastes especıficos para los modelos(4.7) y (4.8) por Hasza y Fuller (1982), Dickey, Hasza y Fuller (1984), Bhargava (1990),Osborn, Chui, Smith y Birchenhall (1988), ademas de Hylleberg, Engle, Granger y Yoo(1990) entre otros.
4.4.1. Contrastes de Hasza y Fuller
Hasza y Fuller (1982) desarrollaron varios contrastes para un modelo del tipo (4.7).Estos contrastes, ası como los de Dickey, Hasza y Fuller (1984) para el modelo (4.8),utilizan un planteamiento similar a los ya clasicos tests de Dickey-Fuller. La distribucionde los distintos estadısticos se tabula para innovaciones ruido blanco y su extension parapolinomios autorregresivos es facil de desarrollar.
Hasza y Fuller desarrollan tres contrastes. El primero se basa en la regresion:
yt = β1yt−1 + β2(yt−1 − yt−S−1) + β3(yt−S − yt−S−1) + +
p∑j=1
φjxt−j + εt
donde xt = (1 − L)(1 − LS)yt, εt es iid normal con varianza σ2 y S es el periodo alque se recogen las observaciones (S = 12 si son datos mensuales). La hipotesis nula

4.4. CONTRASTES DE R.U. EN LAS FRECUENCIAS ESTACIONALES 37
β1 = 1, β2 = 0 y β3 = 1 implica que
(1− φ1L− φ2L2 − · · · − φpLp)(1− L)(1− LS)yt = εt
donde el polinomio autorregresivo φ(L) no tiene raıces en el cırculo unidad. Los parame-tros φi y p se dejan sin especificar de forma que han de ser estimados y determinados.Los otros dos contrastes sugeridos por Hasza y Fuller se basan en la regresion:
yt = α0 t+S∑j=1
αjDjt+ β1yt−1 + β2yt−S + β3yt−S−1 + εt (4.12)
la hipotesis nula del segundo contraste es αi = 0 ∀i, β1 = β2 = 1 y β3 = −1. Lahipotesis nula del tercer contraste es β1 = β2 = 1 y β3 = −1. Los contrastes basadosen (4.12) tienen explıcitamente la alternativa de una tendencia lineal y una estacionali-dad determinista. Desafortunadamente la alternativa es bastante restrictiva ya que solose permiten innovaciones que son ruido blanco. La interpretacion de los resultados deHasza-Fuller es difıcil por dos razones. Primero, el contraste impone dos raıces unita-rias en la frecuencia cero bajo la hipotesis nula. Segundo, no esta claro como cambia eldesarrollo del test cuando solo alguna de las frecuencias estacionales muestra una raızunitaria. El rechazo no demuestra que no exista ninguna raız unitaria en todas las fre-cuencias. Ademas, el hecho de no rechazar la hipotesis nula no ayuda a identificar lasfrecuencias que son integradas. Solo se obtiene que todas las frecuencias tienen raıcesunitarias y la frecuencia cero tiene dos. La hipotesis nula en los test de Hasza y Fuller esun modelo multiplicativo estacional con raıces unitarias. Es obvio que el rechazo de talespecificacion puede deberse al hecho de que el supuesto de raıces unitarias estacionalesno es adecuado o al hecho de que no haya dos raıces unitarias en la parte no estacional.Posteriormente Osborn, Chui, Smith y Birchenhall (1988) construyen un metodo paracontrastar las dos hipotesis por separado.
4.4.2. Contrastes de Dickey, Hasza y Fuller
Dickey, Hasza y Fuller (1984) formulan varios contrastes para el modelo con raıcesunitarias estacionales (4.8). Bajo la hipotesis nula se supone que:
(1− φ1L− φ2L2 − · · · − φpLp)(1− LS)yt = εt (4.13)
evitando ası el supuesto de dos raıces unitarias en la frecuencia cero. La ecuacion (4.13)de nuevo sugiere un metodo similar al de Dickey-Fuller aumentado (ADF), utilizando unestadıstico t o el sesgo normalizado del coeficiente estimado. Basandose en su potencia,Dickey, Hasza y Fuller sugieren utilizar el estadıstico del sesgo normalizado, que parecemas potente contra un modelo de media determinista estacional (sin tendencia). Comoel test de Hasza-Fuller, este test adolece de los problemas de la interpretacion de losrechazos, baja potencia y autocorrelacion residual.

38 CAPITULO 4. CONTRASTES DE R.U. Y DE COINTEGRACION
4.4.3. Contraste de Bhargava
Bhargava (1990) propone un procedimiento alternativo para contrastar raıces unita-rias estacionales. Esta basado en el metodo que desarrollaron Sargan y Bhargava (1983)para contrastar la hipotesis de que los residuos de una ecuacion de regresion siguen unpaseo aleatorio, metodo que, a su vez, deriva del de Durbin y Watson (1950). El contrasteque propone Bhargava se basa en los residuos de la regresion
yt = α0t+S∑j=1
αjDjt + µt (4.14)
donde µt sigue un modelo estacional gaussiano de paseo aleatorio bajo la hipotesis nula.El metodo de Bhargava proporciona contrastes con distribucion exacta para muestrasfinitas, pero no permite otro tipo de residuos que no sea el paseo aleatorio estacionalgaussiano.
4.4.4. Contraste de Hylleberg, Engle, Granger y Yoo (HEGY)
Hylleberg, Engle, Granger y Yoo (1990) (HEGY) consideran que la hipotesis deigual orden de integracion en todas las frecuencias estacionales es demasiado fuerte.Desarrollan un metodo para contrastar raıces unitarias en cada una de las frecuenciasestacionales por separado. HEGY utilizan en su estudio series trimestrales y posterior-mente Franses (1990) y Beaulieu y Miron (1993) extienden este metodo para datos men-suales.
El procedimiento de HEGY, traducido a datos mensuales por Beaulieu y Miron,consiste en lo siguiente:
Sea xt la serie de interes, generada por la ecuacion
φ(L)xt = εt (4.15)
donde εt es un ruido blanco y φ(L) es un polinomio en el operador de retardos. Supon-gamos que la serie xt no presenta componente determinista de ninguna clase. Sean γklas raıces de la ecuacion caracterıstica asociada a φ(L). La frecuencia asociada a unadeterminada raız es el valor de α en < eαi, la representacion polar de la raız. Una raız esestacional si α = 2πj
S , j = 1, 2, . . . , S − 1 donde S es el numero de observaciones porano. Para datos mensuales, las raıces unitarias estacionales son:
−1, ±i, −(1±√
3i)/2, (1±√
3i)/2, −(√
3± i)/2, (√
3± i)/2 (4.16)
El metodo de contraste desarrollado por HEGY consiste en linealizar el polinomio φ(L)en torno a la raız unitaria de la frecuencia cero y las S − 1 raıces unitarias estacionalesde (4.16). Ası φ(L) se puede escribir:
φ(L) =
S∑k=1
λk∆(L)1− δk(L)
δk(L)+ ∆(L)φ∗(L) (4.17)

4.4. CONTRASTES DE R.U. EN LAS FRECUENCIAS ESTACIONALES 39
donde δk(L) = 1− 1θk
(L), λk = φ(θk)∏j 6=k δj(θk)
y ∆(L) =∏Sk=1 δk(L).
φ∗(L) tiene todas sus raıces fuera del cırculo unidad, y los θk son las raıces unitariasde frecuencia cero y estacionales. En el caso de datos mensuales, sustituyendo (4.17) en(4.15) se obtiene:
φ∗(L) y13,t =
12∑k=1
πk yk,t−1 + εt (4.18)
donde:
y1,t = (1 + L+ L2 + · · ·+ L11)xt
y2,t = −(1− L+ L2 − L3 + L4 − L5 + L6 − L7 + L8 − L9 + L10 − L11)xt
y3,t = −(L− L3 + L5 − L7 + L9 − L11)xt
y4,t = −(1− L2 + L4 − L6 + L8 − L10)xt
y5,t = −1
2(1 + L− 2L2 + L3 + L4 − 2L5 + L6 + L7 − 2L8 + L9 + L10 − 2L11)xt
y6,t =
√3
2(1− L+ L3 − L4 + L6 − L7 + L9 − L10)xt
y7,t =1
2(1− L− L2 − L3 + L4 + L5 + L6 − L7 − L8 − L9 + L10 + L11)xt
y8,t = −√
3
2(1 + L− L3 − L4 + L6 + L7 − L9 − L10)xt
y9,t = −1
2(√
3− L+ L3 −√
3L4 + 2L5 −√
3L6 + L7 − L9 +√
3L10 − 2L11)xt
y10,t =1
2(1−
√3L+ 2L2 −
√3L3 + L4 − L6 +
√3L7 − 2L8 +
√3L9 − L10)xt
y11,t =1
2(√
3 + L− L3 −√
3L4 − 2L5 −√
3L6 − L7 + L9 +√
3L10 + 2L11)xt
y12,t = −1
2(1 +
√3L+ 2L2 +
√3L3 + L4 − L6 −
√3L7 − 2L8 −
√3L9 − L10)xt
y13,t = (1− L12)xt
Para contrastar hipotesis sobre raıces unitarias se estima (4.18) por mınimos cuadra-dos ordinarios y se comparan determinados estadısticos con las distribuciones adecuadashalladas mediante metodos de Montecarlo. Para las frecuencias cero y π se examina sim-plemente el estadıstico t relevante para la hipotesis nula πk = 0 contra la alternativa deπk < 0. Para las otras raıces se contrasta πk = 0, donde k es par, en un test de doscolas. El coeficiente par es cero si la serie tiene una raız unitaria en esa frecuencia y esdistinto de cero si no la tiene. Bajo la alternativa de que no hay una raız unitaria en lafrecuencia en cuestion, el coeficiente par puede ser positivo o negativo. Si se rechazaπk = 0, entonces se contrasta πk−1 = 0 contra la alternativa de que πk−1 < 0; el test esde una cola debido a que la alternativa es que la serie contiene una raız fuera del cırculounidad. Otra estrategia serıa contrastar πk−1 = πk = 0 mediante un estadıstico F.

40 CAPITULO 4. CONTRASTES DE R.U. Y DE COINTEGRACION
HEGY presentan tablas calculadas por el metodo de Montecarlo para todos los es-tadısticos t y F necesarios con datos trimestrales. En Beaulieu y Miron (1993) se en-cuentran las tablas para datos mensuales.
La ventaja fundamental del procedimiento de HEGY sobre trabajos anteriores esque permite distinguir procesos que son integrados solo en alguna de las frecuenciasestacionales y no en todas.
Capıtulo 5
Contrastes de integracion estacional
5.1. Introduccion
En el capıtulo 3 se ha mostrado como la existencia de factores estacionales comunesSI(1) entre los elementos de un vector yt formado por n series temporales, implicaque existe cointegracion estacional uniforme entre ellas, y viceversa. Esto sugiere lautilizacion de un metodo indirecto para contrastar la especificacion de un modelo defactores estacionales comunes. Se tratarıa de contrastar la existencia de cointegracionestacional entre ellas.
Sin embargo, no se dispone de un metodo para contrastar la hipotesis de integracionestacional [en los terminos de la definicion 4 de Engle et al (1989)] ni tampoco paracontrastar la hipotesis de cointegracion estacional1. Utilizando los contrastes de HEGYse obtendrıan valores crıticos erroneos para estas hipotesis, ya que HEGY intentan con-trastar la presencia de raıces unitarias separadamente en cada frecuencia, mientras quelo que aquı interesa es un contraste conjunto para todas las frecuencias estacionales, yaque el modelo de referencia es un modelo de factores comunes estacionales SI(1) y, portanto, para comprobar si un conjunto de series determinado puede haber sido generadopor un modelo de este tipo se necesita contrastar que cada una de las series es SI(1) yque los residuos de las ecuaciones cointegrantes son SI(0).
En la seccion 5.2 se presenta un metodo de contraste para la hipotesis de integracionestacional, basado en un estadıstico de tipo F y siguiendo la estructura de los contrastesde raıces unitarias de Dickey y Fuller (1979). En la seccion 5.3 se realizan las pruebasde potencia de este metodo, en la seccion 5.4 se extiende el metodo para permitir algunaestructura en el componente no estacional de la serie, en la seccion 5.5 se presenta unmetodo de contraste de la hipotesis de integracion estacional utilizando un estadısticode tipo t y en la seccion 5.5.1 se realizan las pruebas de potencia de este contraste.
1Lee (1992) propone un metodo, basado en el modelo de correccion de error, que permite contrastar lahipotesis de cointegracion estacional, pero los estadısticos solo estan tabulados para el caso trimestral.
41

42 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
5.2. Contraste de la hipotesis de integracion estacional utili-zando un estadıstico de tipo F
Sea xt una serie de datos mensuales (S = 12). Si la serie xt fuera SI(1), tendrıamosque S(L)xt serıa un proceso estacionario, generado por una ecuacion del tipo:
S(L)xt = µ+ ut (5.1)
donde µ es una constante y ut un proceso estacionario. Teniendo esto en cuenta, se puedeplantear un test de integracion en las frecuencias estacionales considerando la ecuacion:
(1 + φ1L+ φ2L2 + · · ·+ φ11L
11)xt = µ+ εt (5.2)
en la que εt es un proceso iid2. En esta ecuacion, bajo la hipotesis nula conjunta:
H0 : [φ1 = 1, φ2 = 1, . . . , φ11 = 1]
la serie xt serıa integrada estacionalmente de orden uno, SI(1).Para realizar este contraste de una forma mas practica se puede expresar el modelo
como:xt = µ− φ1xt−1 − φ2xt−2 − · · · − φ11xt−11 + εt (5.3)
y sumando (xt−1 + xt−2 + · · ·+ xt−11) en los dos miembros se obtiene,
S(L)xt = µ+ (1− φ1)xt−1 + (1− φ2)xt−2 + · · ·+ (1− φ11)xt−11 + εt (5.4)
que se puede escribir como
S(L)xt = µ+ γ1xt−1 + γ2xt−2 + · · ·+ γ11xt−11 + εt (5.5)
siendo γj = (1− φj) para j = 1, 2, ..., 11. y ahora la hipotesis a contrastar serıa:
H0 : [γ1 = 0, γ2 = 0, . . . , γ11 = 0]
Para contrastar este tipo de hipotesis, en el modelo de regresion lineal clasico sesuele utilizar el estadıstico:
F =(Rβ − r)′
[R(X ′X)−1R′
]−1(Rβ − r)/11
ε′ε / (n− 12)
donde la matriz R y el vector r son:
R =
0 1 0 0 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 0 0 00 0 0 1 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 0...
......
......
......
......
......
...0 0 0 0 0 0 0 0 0 0 0 1
11×12
y r =
0000...0
11×1
(5.6)
2En la seccion 5.4 se relaja este supuesto.
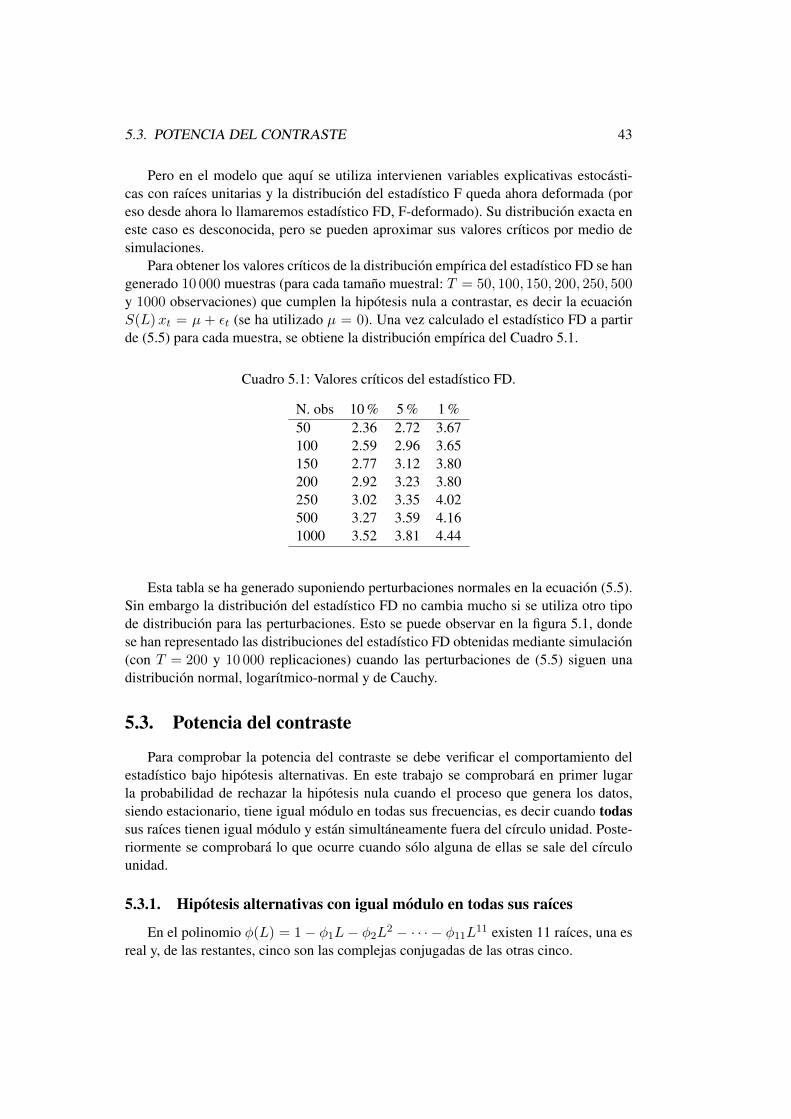
5.3. POTENCIA DEL CONTRASTE 43
Pero en el modelo que aquı se utiliza intervienen variables explicativas estocasti-cas con raıces unitarias y la distribucion del estadıstico F queda ahora deformada (poreso desde ahora lo llamaremos estadıstico FD, F-deformado). Su distribucion exacta eneste caso es desconocida, pero se pueden aproximar sus valores crıticos por medio desimulaciones.
Para obtener los valores crıticos de la distribucion empırica del estadıstico FD se hangenerado 10 000 muestras (para cada tamano muestral: T = 50, 100, 150, 200, 250, 500y 1000 observaciones) que cumplen la hipotesis nula a contrastar, es decir la ecuacionS(L)xt = µ + εt (se ha utilizado µ = 0). Una vez calculado el estadıstico FD a partirde (5.5) para cada muestra, se obtiene la distribucion empırica del Cuadro 5.1.
Cuadro 5.1: Valores crıticos del estadıstico FD.
N. obs 10 % 5 % 1 %50 2.36 2.72 3.67100 2.59 2.96 3.65150 2.77 3.12 3.80200 2.92 3.23 3.80250 3.02 3.35 4.02500 3.27 3.59 4.161000 3.52 3.81 4.44
Esta tabla se ha generado suponiendo perturbaciones normales en la ecuacion (5.5).Sin embargo la distribucion del estadıstico FD no cambia mucho si se utiliza otro tipode distribucion para las perturbaciones. Esto se puede observar en la figura 5.1, dondese han representado las distribuciones del estadıstico FD obtenidas mediante simulacion(con T = 200 y 10 000 replicaciones) cuando las perturbaciones de (5.5) siguen unadistribucion normal, logarıtmico-normal y de Cauchy.
5.3. Potencia del contraste
Para comprobar la potencia del contraste se debe verificar el comportamiento delestadıstico bajo hipotesis alternativas. En este trabajo se comprobara en primer lugarla probabilidad de rechazar la hipotesis nula cuando el proceso que genera los datos,siendo estacionario, tiene igual modulo en todas sus frecuencias, es decir cuando todassus raıces tienen igual modulo y estan simultaneamente fuera del cırculo unidad. Poste-riormente se comprobara lo que ocurre cuando solo alguna de ellas se sale del cırculounidad.
5.3.1. Hipotesis alternativas con igual modulo en todas sus raıces
En el polinomio φ(L) = 1− φ1L− φ2L2 − · · · − φ11L11 existen 11 raıces, una esreal y, de las restantes, cinco son las complejas conjugadas de las otras cinco.
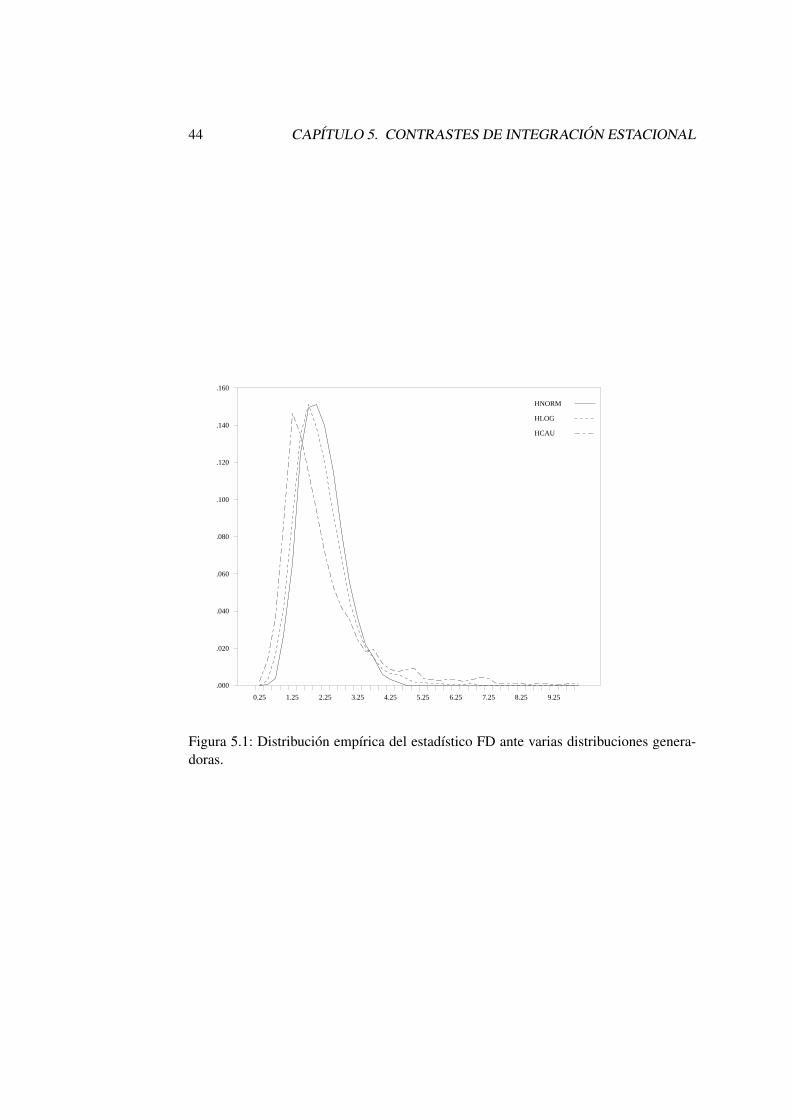
44 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
0.25 1.25 2.25 3.25 4.25 5.25 6.25 7.25 8.25 9.25
.000
.020
.040
.060
.080
.100
.120
.140
.160
HNORM
HLOG
HCAU
Figura 5.1: Distribucion empırica del estadıstico FD ante varias distribuciones genera-doras.
5.3. POTENCIA DEL CONTRASTE 45
Siendo 1/µ1, . . . , 1/µ11 las once raıces de φ(L), supongamos que µ1 = m1, µ2 =m1, µ3 = m2, µ4 = m2, µ5 = m3, µ6 = m3, µ7 = m4, µ8 = m4, µ9 = m5, µ10 = m5
y µ11 = m6 , donde m es la compleja conjugada de m. Utilizando las coordenadaspolares, cada raız se puede escribir de la forma:
1
mj=
1
Ajei
2πjS
y su conjugada:1
mj=
1
Aje−i
2πjS
y, por tanto, mj = Aj e−i 2πj
S y mj = Aj ei 2πjS , siendo 2πj
S la frecuencia angular aso-ciada a las raıces 1/mj y 1/mj . Si S = 12, las once raıces de φ(L) corresponden a lasfrecuencias ±π/6, ±π/3, ±π/2, ±2π/3, ±5π/6 y π.
Si todas las raıces del polinomio tuvieran el mismo modulo (1/Aj = 1/A, constantepara todo j) el polinomio φ(L) se podrıa escribir de forma bastante sencilla en funciondel inverso del modulo3, A:
φ(L) = 1 +AL+ (AL)2 + (AL)3 + (AL)4 + (AL)5
+(AL)6 + (AL)7 + (AL)8 + (AL)9 + (AL)10 + (AL)11 (5.7)
Para comprobar la potencia del test se han generado 10 000 muestras de un procesoestacionario con 11 raıces de modulo 1/0,85, es decir, que provienen de la ecuacion:(
1 + 0,85L+ (0,85L)2 + (0,85L)3 + · · ·+ (0,85L)11)xt = εt (5.8)
siendo εt un ruido blancoN(0, 1). Los resultados han sido los que recoge el Cuadro 5.2.
Cuadro 5.2: Potencia ante la alternativa del modelo (5.8).
Nivel de significacionN. Obs. 10 % 5 % 1 %
50 0,7164 0,5870 0,2818100 0,9919 0,9736 0,8848150 1,0000 0,9999 0,9967200 1,0000 1,0000 1,0000250 1,0000 1,0000 1,0000
En el apendice de graficos B (pagina 122), graficos 1 a 5, se han representado lasdistribuciones empıricas del estadıstido FD bajo la hipotesis nula y bajo la hipotesisalternativa para cada tamano muestral.
3Ver prueba en el Apendice 1
46 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
Se comprueba como a medida que aumenta el tamano muestral, aumenta la proba-bilidad de rechazar la hipotesis nula de que el proceso tiene 11 raıces unitarias cuandorealmente ha sido generado por la ecuacion (5.8) Por tanto, el test no es inconsistente.
Por otra parte, estas cantidades muestran como para un nivel de significacion del 5 %,utilizando aproximadamente 100 observaciones o mas el test es capaz de enfrentarse conbastante fiabilidad a esta hipotesis alternativa. Se ha desarrollado el mismo experimentovariando el modulo de las raıces a 1/0,90, 1/0,95 y 1/0,97 obteniendo los resultadosdel Cuadro 5.3 (esta vez solo para un valor fijo de n = 150 observaciones).
Cuadro 5.3: Potencia ante diferentes modulos.
Nivel de significacionModulo 10 % 5 % 1 %
1/0,90 0,9999 0,9991 0,98761/0,95 0,9556 0,8969 0,67401/0,97 0,6157 0,4341 0,1614
Se comprueba como hasta modulos cercanos a 1/0,95 la probabilidad de rechazar lahipotesis alternativa es bastante alta y, por tanto, se puede considerar el estadıstico comosuficientemente fiable.
5.3.2. Hipotesis alternativas con raıces de distinto modulo
En el modelo de regresion lineal clasico, con regresores fijos, cuando la hipotesisnula H0 : Rβ = r no se verifica, el vector (Rβ− r) sigue una distribucion normal, perocon media distinta de cero (igual aRβ−r). Esto hace que el numerador del estadıstico F(multiplicado por σ2) siga una distribucion descentrada χ2(q, δ) donde q son los gradosde libertad del numerador y δ es el parametro de excentricidad:
δ = (Rβ − r)′[R(X ′X)−1R
]−1(Rβ − r) (5.9)
La media de esta distribucion es T + δ y su varianza 2(T + 2δ). Entonces, el estadısti-co F sigue una distribucion F de Snedecor descentrada, F(q,T−k,δ) cuyo parametro deexcentricidad es el definido anteriormente (5.9).
Sin embargo, en nuestro caso, la naturaleza estocastica de la matriz (X ′X) impi-de la obtencion analıtica del parametro de excentricidad. A pesar de ello, cabe esperarun comportamiento parecido, ya que el numerador del estadıstico, en cualquier caso,va a tener una distribucion descentrada. La potencia, por tanto, dependerıa de un unicoparametro similar al δ. A medida que crece el numero de raıces que se alejan del cırculounidad, aumentarıa el valor de ese parametro, haciendo que la potencia, a su vez aumen-te. Pero el hecho de que sea una u otra la raız que se aleje del cırculo unidad no deberıaafectar al parametro de excentricidad y, por tanto, a la potencia del contraste.
5.3. POTENCIA DEL CONTRASTE 47
Para comprobar la potencia del estadıstico FD ante hipotesis alternativas con raıcesde distinto modulo, se han generado 10 000 replicaciones de tamano muestral 150 dediez tipos de modelos4:
el primero con diez raıces de modulo uno y una raız superior a uno (1/0,85)(enla frecuencia π).
el segundo con nueve raıces de modulo uno y dos raıces superiores a uno (las dosraıces, de frecuencias ±π/2 con modulos iguales a 1/0,85).
y se ha seguido la misma pauta hasta llegar al decimo modelo con una sola raız unitariay diez raıces superiores a uno (raız unitaria en la frecuencia π y en todas las demasmodulos iguales a 1/0,85).
Se ha calculado el estadıstico FD para cada una de las replicaciones. Teniendo encuenta que para T = 150 y nivel de significacion de 5 % el valor que toma el estadısticoFD bajo la hipotesis nula de que el modelo tiene once raıces unitarias es 3,12, se hanobtenido los resultados del Cuadro 5.4.
Cuadro 5.4: Potencia ante alternativas con raıces de distinto modulo.
Probabilidad de rechazarModelo la hipotesis nula10 raıces unitarias y una raız 1/0,85 0,04529 raıces unitarias y 2 raıces 1/0,85 0,09878 raıces unitarias y 3 raıces 1/0,85 0,13007 raıces unitarias y 4 raıces 1/0,85 0,17096 raıces unitarias y 5 raıces 1/0,85 0,29755 raıces unitarias y 6 raıces 1/0,85 0,55844 raıces unitarias y 7 raıces 1/0,85 0,62213 raıces unitarias y 8 raıces 1/0,85 0,83322 raıces unitarias y 9 raıces 1/0,85 0,93911 raız unitaria y 10 raıces 1/0,85 0,9949
Como se puede apreciar, el estadıstico no es capaz de detectar con suficiente proba-bilidad de una a cinco raıces estacionarias, sin embargo cuando se observan seis o masse manifiesta como bastante potente. En la figura 5.2 se ha representado la distribucionempırica del estadıstico FD bajo la hipotesis nula y bajo siete modelos alternativos (elprograma grafico no permite mas) en los que el numero de raıces no unitarias se va cam-biando paulatinamente. En este grafico se puede apreciar como a medida que aumentael numero de raıces estacionarias, la distribucion se desplaza hacia la derecha, quedandototalmente a la derecha del valor 3,12 (valor crıtico al 5 %) cuando se presentan onceraıces de modulo superior a la unidad.
4Las ecuaciones que, en concreto, se han utilizado se encuentran en el apendice 5.B
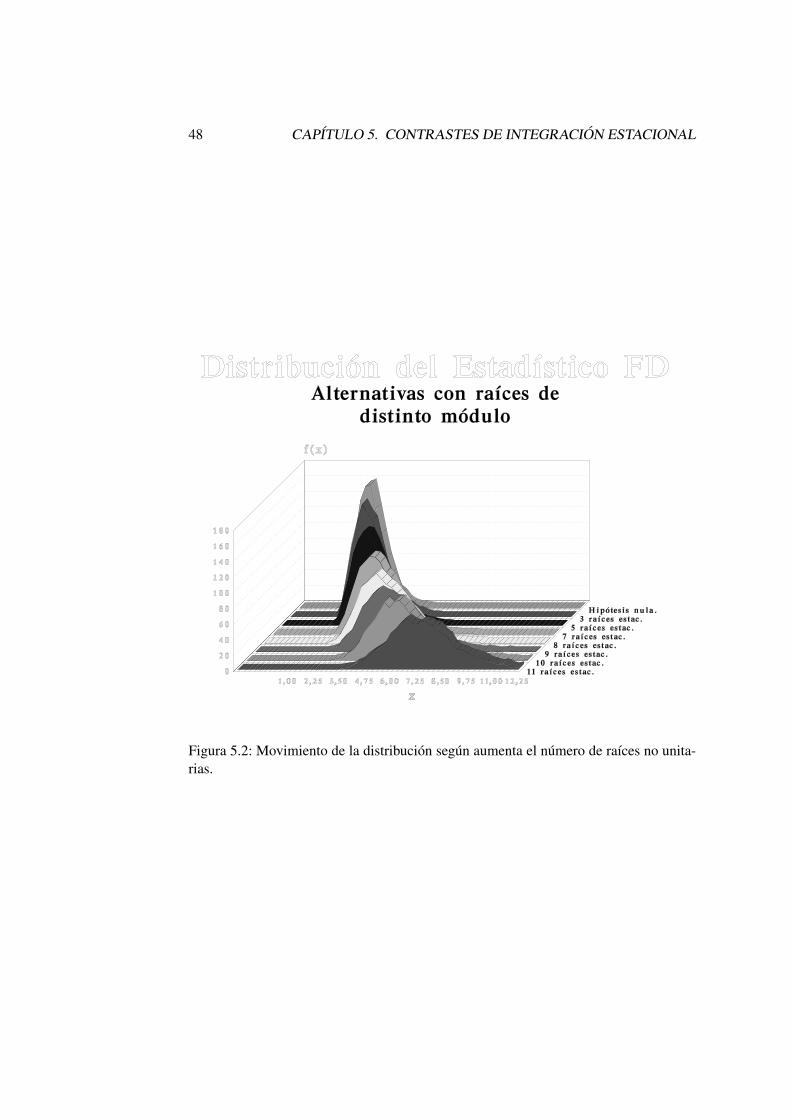
48 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
Figura 5.2: Movimiento de la distribucion segun aumenta el numero de raıces no unita-rias.

5.4. SERIES CON ESTRUCTURA EN EL COMPONENTE NO ESTACIONAL 49
5.4. Series con estructura en el componente no estacional
Es posible que la serie que se analiza, aparte del componente estacional (con o sinraıces unitarias), contenga un componente no estacional, que puede ser estacionario ono estacionario. Aquı se estudiaran los dos casos. En primer lugar, supongamos que esestacionario. En tal caso, puede representarse mediante una estructura ARMA estacio-naria e invertible, lo cual implica que las perturbaciones de la ecuacion (5.2) para estaserie estan autocorrelacionadas. Entonces, los estimadores MCO de los coeficientes noson consistentes y la distribucion del estadıstico varıa con respecto a la obtenida cuandosolo habıa estructura estacional (cuyos valores crıticos se han aproximado empıricamen-te en la tabla 5.1).
Para solucionar esto, sabemos que cualquier proceso ARMA invertible puede seraproximado mediante un proceso AR de orden suficientemente elevado (llamemosle p).En este caso, se puede considerar que la serie ha sido aproximadamente generada poruna ecuacion como:
(1− α1L− · · · − αqLq)S(L)xt = µ+ εt (5.10)
siendo εt iid.Para este tipo de series, el contraste de la hipotesis de integracion estacional se puede
construir de una forma analoga a como se hizo para el modelo (5.1). Siguiendo el mismoproceso, la ecuacion a estimar quedarıa:
(1− α∗1L− · · · − α∗pLp)S(L)xt = µ+ γ1xt−1 + · · ·+ γ11xt−11 + εt (5.11)
donde p = q + 11 y
(1− α∗1L− · · · − α∗pLp) = (1− α1L− · · · − αqLq)(1 + φ1L+ · · ·+ φ11L11)
−(φ1L+ · · ·+ φ11L)
La expresion (5.11) se puede escribir:
S(L)xt = µ+ γ1xt−1 + · · ·+ γ11xt−11 + α∗1S(L)xt−1 +
+α∗2S(L)xt−2 + · · ·+ α∗pS(L)xt−p + εt (5.12)
En la practica, dado que p es desconocido, se debe elegir aquel valor que haga quelas perturbaciones de la ecuacion (5.12) no presenten autocorrelacion. En tal caso, losestimadores MCO de los coeficientes son consistentes.
Aquı la hipotesis de integracion estacional uniforme significa que γ1 = 0, γ2 = 0,. . . y γ11 = 0. Esta hipotesis se puede contrastar por medio de un estadıstico F de res-tricciones lineales (Como en 5.6). Dado que los estimadores de α∗1, α
∗2, . . . , α
∗p son con-
sistentes, la distribucion de ese estadıstico F converge hacia la del estadıstico FD, y portanto, se pueden utilizar sus valores crıticos para un tamano muestral suficientementegrande (> 100).
Supongamos, en segundo lugar, que el componente no estacional de la serie es noestacionario; en concreto, supongamos que presenta una raız unitaria en la frecuencia
50 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
cero. En tal caso, bajo la hipotesis de integracion estacional, la serie habrıa sido generadapor la ecuacion:
(1− L)S(L)xt = µ+ εt
con εt iid.Cuando se trabaja con una serie de este tipo, el procedimiento mas directo es tomar
una diferencia regular:δ xt = ωt
ya que entonces, la serie ωt no contendra la raız unitaria en la frecuencia cero y puedeser tratada como en (5.1) para contrastar la hipotesis de integracion estacional.
El problema que surge en la practica es que no se sabe si las series presentan o noraıces unitarias en el componente no estacional. Entonces, para decidir si se diferenciao no a la serie, es necesario disponer de un metodo que permita contrastar la existenciade una raız unitaria en la frecuencia cero cuando se sospecha la existencia de raıcesunitarias en las frecuencias estacionales. Hylleberg et al (1990) (HEGY) proporcionanun metodo que cumple este requisito, ya que permite contrastar la presencia de raıcesunitarias por separado en cada una de las frecuencias estacionales y en la frecuenciacero. En el presente trabajo, solo nos interesa realmente el contraste de la frecuenciacero.
Teniendo en cuenta que en la realidad, la mayorıa de las series economicas presen-tan alguna raız unitaria en la frecuencia cero, es casi obligatorio realizar el contrastede HEGY para esta frecuencia en todas las series que se utilicen. Sin embargo, comoveremos a continuacion, ambos contrastes (Para la frec. cero y para todas las frec. esta-cionales) se pueden integrar en una sola ecuacion.
Supongamos que la serie xt contiene una raız unitaria en cada frecuencia estacionaly, ademas, una raız unitaria en la frecuencia cero, entonces responderıa a la ecuacion:
(1− L12)xt = µ+ ut (5.13)
siendo ut iid. O, escrito de otra forma:
(1− L)S(L)xt = µ+ ut. (5.14)
Para efectuar el contraste sobre la raız unitaria de la frecuencia cero, teniendo encuenta la presencia de once raıces unitarias estacionales, se puede construir la ecuacion:
(1− φL)S(L)xt = µ+ ut (5.15)
donde la hipotesis a contrastar es H0 : φ = 1 frente a la alternativa H1 : φ < 1.La ecuacion (5.15) se puede reescribir:
S(L)xt = µ+ φS(L)xt−1 + ut
y restando S(L)xt en los dos lados de la ecuacion:
S(L) ∆xt = µ+ γ S(L)xt−1 + ut (5.16)

5.4. SERIES CON ESTRUCTURA EN EL COMPONENTE NO ESTACIONAL 51
siendo γ = φ − 1. El contraste de la raız unitaria en la frecuencia cero es un contrastede significatividad del parametro γ y, por tanto, se hace por medio del estadıstico t delcoeficiente γ estimado, que ha de seguir la distribucion del estadıstico de Dickey-Fuller.
Para, simultaneamente, realizar el contraste de integracion estacional, se puede uti-lizar la ecuacion:
(1 + φ1L− · · ·+ φ11L11)∆xt = µ+ (φ− 1)S(L)xt + ut (5.17)
que, reordenando los terminos, se transforma en:
∆xt = µ+ (φ− 1)S(L)xt−1 − φ1∆xt−1 − · · · − φ11∆xt−11 + ut (5.18)
y sumando (∆xt−1 + · · ·+ ∆xt−11) a ambos lados de la ecuacion:
S(L) ∆xt = µ+ (φ− 1)S(L)xt−1 + (1− φ1) ∆xt−1 +
(1− φ2)∆xt−2 + · · ·+ (1− φ11) ∆xt−11 + ut (5.19)
que se puede expresar como:
(1− L12)xt = µ+ γ0 S(L)xt−1 + γ1 ∆xt−1 + · · ·+ γ11 ∆xt−11 + ut (5.20)
donde γ0 = (φ− 1), y γj = (1− φj) para j = 1, ..., 11.Bajo la hipotesis de que existe una raız unitaria en la frecuencia cero, γ0 es igual a
cero. Por lo tanto se puede utilizar un estadıstico de tipo t de Student para realizar estecontraste. Ya que la influencia de los efectos estacionales viene recogida por el resto delos parametros, la distribucion del estadıstico t en este modelo sera la misma que la delestadıstico correspondiente a la frecuencia cero en HEGY (1990).
Bajo la hipotesis de integracion estacional uniforme (11 raıces unitarias, una en cadafrecuencia estacional),γj serıa igual a cero ∀j : 1, ..., 11. Por lo tanto, para contrastaresta hipotesis multiple se puede utilizar un estadıstico de tipo “F”. Dado que la influenciadel componente regular, bajo la hipotesis nula, esta recogida en el termino γ0 S(L)xt−1,la distribucion del estadıstico F para contrastar conjuntamente las restricciones lineales:
H0 : γ1 = 0, . . . , γ11 = 0
es asintoticamente la misma que la del estadıstico FD (Cuyos valores crıticos aproxima-dos se encuentran en el Cuadro 5.1).
Por ultimo, hay que senalar que tambien es posible extender el modelo (5.20) de ma-nera que recoja la posibilidad de que exista ademas una parte autorregresiva estacionariaen el componente no estacional del modelo. Desarrollandolo tal y como se hizo para laecuacion (4.1) se obtiene una ecuacion similar a la (5.12):
∆12 xt = µ+ γ0 S(L)xt−1 + γ1 ∆xt−1 + · · ·+ γ11 ∆xt−11 +
+α1∆12 xt−1 + · · ·+ αp∆12xt−p + ut (5.21)
siendo ∆12 = (1− L12).Los contrastes se llevan a cabo como en la ecuacion (5.20), ya que los estadısticos t
y F siguen asintoticamente las mismas distribuciones.
52 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
5.5. Metodo de contraste basado en un estadıstico de tipo t
La hipotesis de integracion estacional uniforme incorpora 11 restricciones sobre loscoeficientes de la ecuacion (5.5), en concreto:
γ1 = 0, γ2 = 0, . . . , γ11 = 0.
Estas restricciones se pueden plantear en dos etapas. La primera supone que la se-rie tiene igual modulo en todas sus raıces estacionales y la segunda que ese modulo,en concreto, vale uno. La forma de expresar esto matematicamente es la siguiente. Te-niendo en cuenta que las series con igual modulo en todas sus raıces estacionales (verApendice 5.A) son generadas por una ecuacion como:[
1 +AL+ (AL)2 + (AL)3 + · · ·+ (AL)11]xt = εt (5.22)
donde A es el inverso del modulo de todas esas raıces. Sobre los parametros de la ecua-cion (5.5) esto significa que se cumplen las siguientes restricciones, de tipo no lineal:
γj = 1− (1− γ1)j para j = 2, . . . , 11. (5.23)
Tomando esto como base, se puede desarrollar un contraste para la hipotesis deigualdad de modulos. Consistirıa en estimar la ecuacion (5.5) primero sin restricciones,luego imponiendo estas 10 restricciones no lineales y construir ası un estadıstico F (oun test razon de verosimilitudes, o un test de Wald). Se puede desarrollar la distribucionempırica de este estadıstico, igual que se hizo para el estadıstico FD anterior.
Si, para una serie determinada, se acepta la hipotesis nula utilizando este nuevoestadıstico F, es oportuno contrastar la hipotesis de que el modulo toma concretamenteel valor uno. Para hacerlo, basta con utilizar el estadıstico t del coeficiente γ1 de laecuacion (5.5) estimada imponiendo las restricciones (5.23):
S(L)xt = µ+γ1xt−1+(1−(1−γ1)2)xt−2+ · · ·+(1−(1−γ1)11)xt−11+εt (5.24)
Bajo el supuesto de igualdad de modulos, el parametro γ1 de la ecuacion (5.24) esprecisamente uno menos el inverso del modulo, esto implica que el contraste relevante eneste caso es de una sola cola. Bajo la hipotesis de integracion estacional, las restriccionesde igualdad de modulos se cumplen, el modulo de todas las raıces es igual a uno ypor tanto γ1 = 0; pero bajo la hipotesis alternativa de estacionariedad, el modulo esmayor que uno, γ1 toma un valor positivo comprendido entre cero y uno y, por tanto, loadecuado es comparar el valor obtenido del estadıstico t con el valor crıtico de la coladerecha de la distribucion bajo la hipotesis nula.
Se ha hallado por medio de simulaciones, una aproximacion empırica a la distribu-cion del estadıstico t para el coeficiente γ1. En el Cuadro 5.5 se presentan sus valorescrıticos (cola derecha), basados en 10 000 replicaciones.
Cabe suponer que si, para una determinada variable, las raıces no tienen el mismomodulo, entonces el estadıstico t de γ1 en (5.24) no tendra la distribucion adecuada. Portanto, se puede pensar que, en la practica, para contrastar integracion estacional solohabrıa que comprobar el valor de la t(γ1) (sin necesidad del primer paso). Notese que lahipotesis nula contiene las dos etapas: todas las raıces han de tener el mismo modulo, ysu valor en concreto ha de ser 1.
5.5. METODO DE CONTRASTE BASADO EN UN ESTADISTICO DE TIPO T 53
Cuadro 5.5: Valores crıticos de t(γ1).
Nivel de significacionN. Obs. 10 % 5 % 1 %
50 1,38 1,72 2,42100 1,43 1,78 2,36150 1,48 1,81 2,46200 1,54 1,89 2,56250 1,55 1,90 2,54
5.5.1. Potencia del contraste
En esta seccion se va a comprobar la potencia del contraste de integracion estacionalbasado en el estadıstico t que se acaba de describir en la seccion anterior. Para ello seva a utilizar un procedimiento similar al que se ha seguido para comprobar la potenciadel estadıstico FD en el apartado 5.3. En primer lugar, se comprueba la probabilidad derechazar la hipotesis nula cuando el proceso que genera los datos, siendo estacionario,tiene igual modulo en todas sus frecuencias estacionales. Mas adelante se analiza lo queocurre cuando algunas de las raıces estacionales, aunque no todas, estan fuera del cırculounidad.
5.5.1.1. Igual modulo en todas las raıces estacionales
Para comprobar la potencia del contraste se han generado 10 000 muestras de ta-manos T = 50, 100, 150, 200 y 250 de un proceso estacionario con 11 raıces estaciona-les de modulo 1/0,85 (Ecuacion 5.8).
Al aplicar el estadıstico t los resultados han sido los que recoge el Cuadro 5.6.
Cuadro 5.6: Potencia del contraste mediante el estadıstico t(γ1).
Nivel de significacionN. Obs. 10 % 5 % 1 %
50 0,075 0,021 0,0001100 0,131 0,053 0,0042150 0,178 0,086 0,0083200 0,216 0,107 0,0118250 0,254 0,132 0,0220
150 (Mod.= 1/0,95) 0,107 0,042 0,0031
Al igual que el contraste basado en el estadıstico FD, este contraste no parece incon-sistente, ya que al aumentar el tamano muestral, aumenta la probabilidad de rechazar

54 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
la hipotesis nula de que el proceso tiene 11 raıces unitarias cuando realmente ha sidogenerado por un modelo estacionario.
Sin embargo, se puede observar que este contraste es mucho menos potente que eldel estadıstico FD ante hipotesis alternativas de este tipo.
5.5.1.2. Hipotesis alternativas con raıces de modulo diferente
Para comprobar la potencia del contraste ante hipotesis alternativas con raıces dedistinto modulo, se han generado 10 000 replicas de tamano muestral 150 de cinco tiposde modelos:
1. Modelo con dos raıces fuera del cırculo unidad y nueve raıces unitarias.
2. Modelo con cuatro raıces fuera del cırculo unidad y siete raıces unitarias.
3. Modelo con seis raıces fuera del cırculo unidad y cinco raıces unitarias.
4. Modelo con ocho raıces fuera del cırculo unidad y tres raıces unitarias.
5. Modelo con diez raıces fuera del cırculo unidad y una raız unitaria.
Para todas las raıces fuera del cırculo unidad se ha tomado un modulo igual a 1/0,85.Para todas las replicaciones se ha estimado la ecuacion (5.24) por mınimos cuadra-
dos no lineales, utilizando el algoritmo de Gauss-Newton, posteriormente se ha calcu-lado el estadıstico t del coeficiente γ1 y se han obtenido los resultados del Cuadro 5.7.
Cuadro 5.7: Potencia de t(γ1) ante alternativas con raıces de distinto modulo.
Probabilidad de rechazarModelo la hipotesis nula1 0,04962 0,08453 0,12314 0,15895 0,2934
Como se puede ver, la potencia aumenta al crecer el numero de raıces fuera delcırculo unidad. Tambien se aprecia que la potencia es mayor en los cuatro ultimos mo-delos que la que se tenıa frente a la hipotesis alternativa con todos los modulos iguales a1/0,85. Esto es comprensible ya que ahora se esta incumpliendo tambien la hipotesis deigualdad de modulos, la ecuacion (5.24) es una mala especificacion para series genera-das por procesos con modulos diferentes en sus distintas raıces estacionales y para estasseries el estimador del parametro γ es inconsistente.

5.5. METODO DE CONTRASTE BASADO EN UN ESTADISTICO DE TIPO T 55
De nuevo, si se compara la potencia del estadıstico t frente a la del estadıstico FD,se aprecia que este tambien es mas potente ante hipotesis alternativas con diferentesmodulos en sus raıces.

56 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL

Apendice
5.A. Polinomio con raıces del mismo modulo
Si todas las raıces del polinomio tienen el mismo modulo (1/Aj = 1/A constantepara todo j). El polinomio φ(L) se puede escribir:
φ(L) = 1 +AL+ (AL)2 + (AL)3 + (AL)4 + (AL)5
+(AL)6 + (AL)7 + (AL)8 + (AL)9 + (AL)10 + (AL)11
Demostracion:Para verlo se ha de tener en cuenta que
φ(L) = 1− φ1L− φ2L2 − · · · − φ11L11 = (1− µ1L)(1− µ2L) · · · (1− µ11L)
que a su vez es igual a
(1−m1L)(1− m1L)(1−m2L)(1− m2L) · · · (1−m6L).
Recordemos que si mj y mj son dos raıces conjugadas, entonces:
mj + mj = 2A cos2πj
12y mj · mj = A2
por tanto,
(1−mjL)(1− mjL) = 1− 2A cos2πj
12+ (AL)2
teniendo en cuenta esta ultima expresion, se obtiene que
para j = 1 (1−m1L)(1− m1L) = 1− 2A cos2π
6+ (AL)2
para j = 2 (1−m2L)(1− m2L) = 1−AL+ (AL)2
para j = 3 (1−m3L)(1− m3L) = 1 + (AL)2
para j = 4 (1−m4L)(1− m4L) = 1 +AL+ (AL)2
para j = 5 (1−m5L)(1− m5L) = 1− 2A cos5π
6+ (AL)2
para j = 6 (1−m6L)(1− m6L) = 1 +AL (5.25)
57

58 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
ası que multiplicando,
(1−m2L)(1− m2L)(1−m4L)(1− m4L) = 1 + (AL)2 + (AL)4
(1−m1L)(1− m1L)(1−m5L)(1− m5L) = 1− (AL)2 − (AL)4 (5.26)
y el producto de estas dos expresiones da:
(1−m1L)(1− m1L)(1−m2L)(1− m2L)(1−m4L)(1− m4L)··(1−m5L)(1− m5L) = 1 + (AL)4 + (AL)8
(5.27)
que multiplicado por (1−m3L)(1− m3L) es igual a:
1 + (AL)2 + (AL)4 + (AL)6 + (AL)8 + (AL)10
y, finalmente multiplicando por (1 − m6L) se obtiene el polinomio original φ(L) enfuncion del modulo (comun) de todas sus raıces:
φ(L) = 1 +AL+ (AL)2 + (AL)3 + (AL)4 + (AL)5
+(AL)6 + (AL)7 + (AL)8 + (AL)9 + (AL)10 + (AL)11 (5.28)
5.B. Modelos para hipotesis alternativas con diferente nume-ro de raıces unitarias
Las ecuaciones que se han utilizado para simular el modelo bajo hipotesis alternati-vas son las siguientes: (Se ha utilizado A = 1 y B = 0.85)
10 raıces con modulo 1/A y una con modulo 1/B (Frec. π):
(1 +BL+A2L2 +A2BL3 +A4L4 +A4BL5 +A6L6+A6BL7 +A8L8 +A8BL9 +A10L10 +A10BL11)xt = εt
(5.29)
9 raıces con modulo 1/A y dos con modulo 1/B (Frecs. ±π/2)
(1 +AL+B2L2 +AB2L3 +A4L4 +A5L5 +A4B2L6+A5B2L7 +A8L8 +A9L9 +A8B2L10 +A9B2L11)xt = εt
(5.30)
8 raıces con modulo 1/A y tres con modulo 1/B (Frecs. ±π/2 y π)
(1 +BL+B2L2 +B3L3 +A4L4 +A4BL5 +A4B2L6+A4B3L7 +A8L8 +A8BL9 +A8B2L10 +A8B3L11)xt = εt
(5.31)
7 raıces con modulo 1/A y cuatro con modulo 1/B (Frecs. ±π/6 y ±5π/6)
(1 +AL+ (2A2 −B2)L2 + (2A3 −AB2)L3+
(2A4 − 2A2B2 −B4)L4 + (2A5 − 2A3B2 −AB4)L5+
(A6 − 2A4B2 − 2A2B4)L6 + (A7 − 2A5B2 − 2A3B4)L7+
(−(A6B2)− 2A4B4)L8 + (−(A7B2)− 2A5B4)L9−
A6B4L10 −A7B4L11)xt = εt
(5.32)
5.B. MODELOS PARA HIPOTESIS ALTERNATIVAS CON DIFERENTE NUMERO DE RAICES UNITARIAS59
6 raıces con modulo 1/A y cinco con modulo 1/B (Frecs. ±π/6, ±5π/6 y π).
(1 +BL+ (2A2 −B2)L2 + (2A2B −B3)L3+
(2A4 − 2A2B2 +B2)L2 + (2A4B − 2A2B3 +B5)L5+
(A6 − 2A4B2 + 2A2B4)L6 + (A6B − 2A4B3+
2A2B5)L7 + (−(A6B2) + 2A4B4)L8 + (−(A6B3)+
2A4B5)L9 +A6B4L10 +A6B5L11)xt = εt
(5.33)
Para el modelo con cinco raıces unitarias y seis estacionarias se ha utilizado la ecuacion(5.33) pero con B = 1 y A = 0,85. De la misma forma, para el modelo con cuatroraıces unitarias se ha utilizado la ecuacion (5.32), para el de tres la ecuacion (5.31), parael de dos la ecuacion (5.30) y para el de una la ecuacion (5.29), utilizando en todas ellasB = 1 y A = 0,85.

60 CAPITULO 5. CONTRASTES DE INTEGRACION ESTACIONAL
Capıtulo 6
Metodos de estimacion de modelosde factores comunes
6.1. Introduccion
A lo largo del capıtulo 3 se ha comprobado que el concepto de cointegracion esta es-trechamente relacionado con el concepto de factor comun. En la literatura sobre cointe-gracion se ha puesto mucha atencion y esfuerzo en la estimacion de los vectores cointe-grantes, tanto en lo que se refiere a la frecuencia cero (Ver por ejemplo Engle y Granger,1987; Johansen, 1988) como a las frecuencias estacionales (Ver Engle et al, 1989; Lee,1992; Engle et al, 1993; Hylleberg et al, 1990). Sin embargo, se ha dedicado relativa-mente poca atencion a la estimacion de los vectores de factores comunes. Hay variasrazones por las que puede resultar interesante disponer de una estimacion de los facto-res. Por ejemplo, cuando se dispone de un sistema con una gran cantidad de variables yse necesita reducir su dimension. El modelo, para todo el conjunto de variables, puedeparecer muy complejo, pero si lo que interesa es su comportamiento a largo plazo, pue-de utilizarse una representacion formada por un conjunto mas pequeno de variables, queson los factores comunes de las originales. El analisis del comportamiento a largo plazode un sistema macroeconomico completo puede hacerse encontrando primero los facto-res comunes de cada sector de la economıa y estudiando despues la cointegracion entreellos. Otra razon para que interese extraer los factores es que la estimacion de estos per-mite descomponer el vector yt, formado por las series originales, en dos componentesft (vector de factores comunes) y (yt−Aft) que contienen diferentes tipos de informa-cion. Por ejemplo, los encargados de la polıtica economica pueden estar interesados enel componente permanente ft (que puede incluir la tendencia y la parte no estacionariadel componente estacional), mientras que los empresarios, mas preocupados por contro-lar el ciclo de negocios, estaran mas interesados en el componente cıclico o transitorio(yt − Aft). Otra ventaja que tiene la extraccion de los factores es que permite estudiarsu relacion con variables reales, ası a veces sera posible establecer la similitud entre unfactor y una variable o una combinacion de variables reales.
En lo que se refiere a la estimacion de factores de tendencia comun, se conocen
61

62 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
dos metodos: uno basado en la maximizacion de la funcion de verosimilitud del mo-delo (en el dominio de la frecuencia) (Fernandez Macho, 1986), que se vera aquı en laseccion 6.2.1 y el segundo y mas reciente, de Gonzalo y Granger (1991) que, como seapreciara en la seccion 6.2.2, basa la estimacion en la representacion como mecanismode correccion de error (ECM) del modelo.
En cuanto a la estimacion de modelos con factores comunes estacionales, es posibleutilizar la extension del procedimiento de Fernandez Macho (1986) que el mismo pro-pone en su trabajo, y se recoge aquı en la seccion refsec6.3.1. Este es el unico metodoconocido para estimar factores estacionales comunes, aunque se puede intuir, y se tra-tara de comprobar en este capıtulo, en la seccion 6.3.2, que es posible adaptar el metodopropuesto por Gonzalo y Granger para la estimacion de este tipo de factores.
6.2. Estimacion de modelos con tendencias comunes
6.2.1. Maximizacion de la funcion de verosimilitud espectral del modelo
Desarrollaremos aquı el metodo de Fernandez Macho (1986). Sea el modelo:
ytn× 1
= An× k
µtk × 1
+ εtn× 1
, t = 0, . . . , T (6.1)
µtk × 1
= µt−1k × 1
+ βk × 1
+ ηtk × 1
(6.2)
[εtηt
]∼ NID
[0,
[Σε 00 Ση
] ](6.3)
Es decir, un modelo en el que los factores comunes se determinan especıficamentecomo paseos aleatorios con rumbo, y por tanto, se interpretan como tendencias linealescomunes.
En este modelo hay k(3 + 2n − k) + n(n + 1)/2 parametros a estimar, que sonlos siguientes:
k parametros en el vector de rumbos β,
nk − k(k + 1)/2 en la matriz de pesos A,
k en la matriz de covarianzas de las innovaciones de las tendencias comunes, Ση,y
n(n+ 1)/2 en la matriz de covarianzas del componente transitorio, Σε.
Como yt ∼ CI(1, 1), tomando diferencias en (6.1) se obtiene una serie estacionaria:
zt = ∆yt −Aβ = Aηt + ∆εt t = 1, . . . , T (6.4)

6.2. ESTIMACION DE MODELOS CON TENDENCIAS COMUNES 63
Consideremos la transformacion de Fourier de la serie zt:
ωj = (2πT )−1/2T∑t=1
zteiλjt, λj =
2πj
T, j = 0, . . . , T − 1.
Esto puede expresarse de forma mas compacta como:
vec(ω)nT × 1
= ( UT × T
⊗ Inn× n
)vec(z)nT × 1
(6.5)
donde ω = (ω0, . . . , ωT−1), z = (z1, . . . , zT ) y U es la matriz de Fourier (T × T ) cuyoelemento (h, k) es (2πT )−1/2 exp(i k λh−1).
Como zt es un proceso no determinista, estacionario y normal multivariante, ωjse distribuye asintoticamente como un proceso heterocedastico normal independientecon media cero, es decir,
ωja∼ N(0,
1
2πGzj), j = 0, ..., T − 1
donde Gzj es la funcion generadora de matrices de autocovarianzas de zt evaluada enλj = 2πj
T . De (6.4) es facil ver que
Gz(u) = AΣηA′ + (1− u)(1− u−1)Σε
Gzj = Gz(ei λj ) = AΣηA
′ + cjΣε, cj = 2− 2 cosλj
Como las ωj son independientes, el logaritmo de su funcion de densidad conjunta es lasuma de los logaritmos de sus densidades marginales:
L =T−1∑j=0
`j
El hecho de que Σε 0 asegura que Gzj 0 para j > 0, ası que
`j =(
log detGzj + tr[G−1zj (2πPzj)])/2, para j > 0
siendo Pzj la parte real de la matriz de periodogramas de zt en la frecuencia λj .Es obvio que, para j = 0, Gz0 = AΣηA
′ es de rango deficiente. Ası que ω0 tieneuna distribucion normal multivariante degenerada y no es posible una determinacionexplıcita de su funcion de densidad en Rn. Sin embargo (Rao y Mitra, 1971), la densidadexiste en un subespacio de Rn. El logaritmo de la densidad de ω0 en el hiperplanoK ′ω0 = 0 (donde K es una matriz n× (n− k) de rango (n− k)) puede escribirse1:
`0 = −1
1log det(A′A)− 1
2log det(Ση0)−
1
2trΣ−1η [A+(2πP0)(A
+)′]
1A+ es la inversa generalizada Moore-Penrose de A. Cuando A es de rango completo igual al numerode columnas A+ = (A′A)−1A′. Si existe A−1 entonces A+ = A−1.

64 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
En (6.5) se aprecia que, como UU∗ es (2π)−1/2 veces una matriz unitaria, la funcionde verosimilitud (es decir, la funcion de densidad de vec(z) con respecto a la muestra) es(2π)nT/2 veces la funcion de densidad de vec(ω). Entonces, el logaritmo de la funcionde verosimilitud puede escribirse:
L = −nT2
log(2π) +
T−1∑j=0
`j
El periodograma de zt no se puede calcular directamente de la muestra, pues de-pende del parametro desconocido β. Sin embargo β aparece solo en `0, por lo que lafuncion de verosimilitud puede concentrarse en un factor que solo depende de los otrosparametros del modelo:
Lc = −nT2
log(2π)− 1
2log det(A′A)− 1
2log det(Ση) +
T−1∑j=0
`j
Fernandez Macho (1986) propone un algoritmo de scoring para maximizar esta funcionde verosimilitud. Si θ es el vector de parametros a estimar, es decir2
θ =[α, (diag Ση)
′, (vΣε)′] ,
se plantea el procedimiento recursivo:
θk+1 = θk + λkH(θk)
siendo H el vector de direccion H = φ(θ)−1 dLc(θ) con3
dLc =
D′α
[− vec((A+)′) + (ΣηA
′ ⊗ In)∑T−1
j=1 mj
]H ′−1
2 vec Σ−1η + 12(A′ ⊗A′)
∑T−1j=1 mj
D′(12∑T−1
j=1 cjmj)
y φ(θ) =
[φ1(θ)
...φ2(θ)...φ3(θ)
]donde:
φ1(θ) =
φ11(θ)φ12(θ)φ13(θ)
=
=
D′α
[(A′A)−1 ⊗ (In −AA+) − Cnk(A+)′ ⊗A++ 2(ΣηA
′ ⊗ In)(∑T−1
j=1 Mj)Nn(AΣη ⊗ In)]Dα
H ′(A′ ⊗A′)(∑T−1
j=1 Mj)(AΣη ⊗ In)Dα
D′(∑T−1
j=1 Mj)(AΣη ⊗ In)Dα
2vΣε es el vector obtenido de vec(Σε) eliminando los elementos que estan por encima de la diagonal
principal de Σε, como Σε es simetrica, vΣε contendra solo los elementos distintos de Σε.3Las definiciones de Dα, D, mj y Mj se pueden ver en Fernandez Macho (1986).

6.2. ESTIMACION DE MODELOS CON TENDENCIAS COMUNES 65
φ2(θ) =
φ21(θ)
φ22(θ)
φ23(θ)
=
φ12(θ)
H ′−12(Σ−1η ⊗ Σ−1η ) + 1
2(A′ ⊗A′)(∑T−1
j=1 Mj)(A⊗A)H
D′(∑T−1
j=1 cjMj)(A⊗A)H
φ3(θ) =
φ31(θ)
φ32(θ)
φ33(θ)
=
φ13(θ)
φ23(θ)
D′12(∑T−1
j=1 c2jMj)D
Una vez se han estimado los parametros que forman el vector θ, la estimacion de β
se obtiene como:β = T−1A+(yT − y0)
y se puede calcular una estimacion de los factores de tendencia por medio de un algorit-mo de suavizamiento de intervalo fijo (Ver Harvey, 1989, pag 154).
6.2.2. Metodo de estimacion basado en el modelo de correcion de error
(Gonzalo y Granger, 1991)Sea xt un vector formado por n series temporales I(1) con media cero y rango de
cointegracion r. Los elementos de xt pueden explicarse en terminos de un numero maspequeno (n− r) de variables I(1), µt, llamados factores mas unos componentes I(0):
xtn× 1
= A1n× k
µtk × 1
+ xtn× 1
donde k = n − r. Como se vio en el capıtulo 2, este modelo no esta identificado a noser que se imponga alguna restriccion sobre los elementos que lo componen. Gonzaloy Granger proponen unas restricciones distintas a las que se han mencionado en loscapıtulos 2 y 3, y que se han utilizado en el metodo de estimacion visto anteriormente.Una de las condiciones que servira para identificar los factores comunes µt es imponerque µt sean combinaciones lineales de las variables xt:
µtk × 1
= B1k × n
xtn× 1
(6.6)
La otra condicion que ayudara a identificar µt es la restriccion de que A1µt y xt cons-tituyan los componentes permanente y transitorio, respectivamente, de xt, utilizando lasiguiente definicion de una descomposicion en parte permanente-parte transitoria.
Definicion 7. (Gonzalo y Granger, 1991) Sea xt una serie estacionaria en diferencias.Una descomposicion en parte permanente-parte transitoria (P-T) de xt es un par deprocesos estocasticos Pt, Tt tales que:
66 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
i) Pt es estacionario en diferencias y Tt es estacionario en covarianzas,
ii) var(∆Pt), var(∆Tt) > 0,
iii) xt = Pt + Tt,
iv)
a) lımh→∞
∂Et(xt+h)
∂εPt6= 0 y b) lım
h→∞
∂Et(xt+h)
∂εTt= 0
siendo Et la esperanza condicionada a la informacion disponible hasta el momentot, y siendo εPt (εTt) la parte de las innovaciones de Pt (Tt) que es ortogonal a lasinnovaciones de Tt (Pt).
Gonzalo y Granger demuestran que las dos restricciones anteriores son suficientespara identificar los factores comunes µt. Y para estimar estos factores se puede utilizarel siguiente procedimiento.
Consideremos la representacion autorregresiva del vector xt,
xt = π1xt−1 + · · ·+ πqxt−q + εt t = 1, . . . , T (6.7)
donde ε1, . . . , εT son IINn(0,Λ) y x−q+1, . . . , x0 son fijos. Es conveniente reescribirel modelo (6.7) en su representacion como mecanismo de correccion de error (ECM):
∆xt = Πxt−1 + Γ1∆xt−1 + · · ·+ Γq−1∆xt−(q−1) + εt (6.8)
dondeΓi = −(πi+1 + · · ·+ πq) i = 1, . . . , q − 1
y Π = −(I − π1 − · · · − πq)Debido a que xt esta cointegrado con rango r, la matriz de multiplicadores de largo
plazo Π puede descomponerse en
Πn× n
= γn× r
α′
r × n
donde α es la matriz de vectores cointegrantes y γ son los coeficientes de ajuste.De la representacion como mecanismo de correccion de error (ECM) del vector
xt, se obtiene que la matriz B1 que hace que la combinacion (6.6) proporcione unadescomposicion (P-T) del vector xt es γ⊥, ortogonal a γ (es decir γ′⊥γ = 0). Esto seexplica porque el ECM del vector xt es:
∆xt = γ α′xt−1 +
q−1∑i=1
Γi∆xt−i + εt
y si el factor se define como ft = γ′⊥xt entonces:
∆ft = γ′⊥∆xt = γ′⊥
q−1∑i=1
Γi∆xt−i + γ′⊥εt

6.2. ESTIMACION DE MODELOS CON TENDENCIAS COMUNES 67
y por tanto ∆ft no depende de zt = α′xt−1.Los parametros (γ, α,Γ1, . . . ,Γq−1) intervienen independientemente en la funcion
de verosimilitud, de forma que se puede concentrar el modelo con respecto a Π eliminan-do los otros parametros. Esto se hace regresando ∆xt y xt−1 sobre (∆xt−1, . . . ,∆xt−(q−1)).Esto proporciona los residuos R0t y R1t y las matrices de productos residuales
Sij = T−1T∑t=1
RitR′jt con i, j = 0, 1.
el analisis restante se desarrolla sobre el modelo concentrado
R0t = γ α′R1t + εt (6.9)
La estimacion de α se determina por regresion de rango reducido en (6.9) (ver Anderson,1984; Johansen, 1988) y se encuentra resolviendo el problema
|λS11 − S10S−100 S01| = 0
para los valores propios λ1 > · · · > λn y vectores propios V = (v1, . . . , vn). El estima-dor maximo verosımil viene dado por α = (v1, . . . , vr), γ = S01α y Λ = S00 − γγ′. Elestimador maximo-verosımil de γ⊥ se obtiene mediante el siguiente procedimiento:
En primer lugar, resolver la ecuacion
|λS00 − S01S−111 S10| = 0
de donde se obtienen los valores propios λ1 > · · · > λn y vectores propios M =(m1, . . . , mn) normalizados de manera que M ′S00M = I . Se elige γ⊥ tal que
γ⊥ = (mr+1, . . . , mn)
Para ver la distribucion asintotica de γ⊥ es conveniente descomponerlo como sigue:
γ⊥ = γ⊥ d+ γ a
donde d = (γ′⊥γ⊥)−1γ′⊥γ⊥ y a = (γ′γ)−1γ′γ⊥Cuando T →∞,
T 1/2(γ⊥d−1 − γ)⇒ N(0, V ) (6.10)
donde “⇒” significa convergencia en distribucion, V = γ(γ′(Σ00−Λ)γ)−1γ′⊗γ′⊥Λγ⊥y Σ00 = var(∆xt |∆xt−1, . . . ,∆xt−(q−1)).
En la practica, antes de utilizar este procedimiento de estimacion es necesario co-nocer el numero de vectores cointegrantes r. En principio, no hay un procedimientoexacto para determinar r, pero Johansen (1988) ha planteado dos metodos que permitencontrastar el numero de relaciones de cointegracion existentes entre los componentesdel vector xt, se conocen como el contraste de la traza y el contraste del mayor valorpropio.

68 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
6.3. Estimacion de modelos con factores comunes estacionales
6.3.1. Maximizacion de la funcion de verosimilitud espectral del modelo
Fernandez Macho (1986) presenta una generalizacion de su procedimiento para po-sibilitar la existencia de raıces unitarias en el componente estacional de los datos. Propo-ne un modelo con factores comunes formados por tendencias estocasticas con pendientesestocasticas y componentes estacionales estocasticos. Es decir,
ytn× 1
= An× k
ψtk × 1
+ εtn× 1
t = 1− S, . . . , 0, . . . , T (6.11)
ψtk × 1
= µtk × 1
+ stk × 1
(6.12)
µtk × 1
= µt−1k × 1
+ Aβk × kβ
βt−1kβ × 1
+ ηtk × 1
(6.13)
βtkβ × 1
= βt−1kβ × 1
+ ξtkβ × 1
(6.14)
S(L) stk × 1
= ωtk × 1
(6.15)
εtηtξtωt
∼
0,
Σε
Ση
Σξ
Σω
(6.16)
donde 0 ≤ kβ ≤ k ≤ n.Los factores ψt se suponen independientes, por tanto, las matrices Σv, v ∈ η, ξ, ω
son diagonales. Para que los factores esten identificados, se supone que A esta formadapor las k primeras columnas de una matriz triangular hacia abajo.Aβ se supone formadapor las kβ primeras columnas de una matriz triangular hacia abajo.
Denominando ∆S a S(L) ∆, se tiene que
∆ ∆S yt = A∆Sηt +AβS(L)ξt−1 + ∆2ωt+ ∆ ∆S εt
es estacionario, con una funcion generadora de matrices de autocovarianzas:
Gz(u) = (1− uS)(1− u−S)AΣηA′
+S(u)S(u−1)AAβ ΣξA′βA′
+(1− u)(1− u−1)2AΣω A′
+(1− u)(1− u−1)(1− uS)(1− u−S)Σε
si se considera λ = 2πjT se obtiene
Gzj = Gz(eiλj ) = csjAΣηA′ + (csj/c1j)AAβΣξA
′βA′ +
+c2ijAΣω A′ + (cijcsj)Σε,

6.3. EST. DE MOD. CON FACTORES COMUNES ESTACIONALES 69
donde crj = 2− 2 cos(rλj), r ∈ 1, s, y para λ = 0,
Gz0 = s2AAβΣξA′βA′
como en el caso de factores de tendencia comunes, la transformacion de Fourier de zt,(ωj) se distribuye asintoticamente como N(0, (2π)−1Gzj), j = 0, . . . , T − 1.
Para este caso, de aquı se deduce que el logaritmo de la funcion de verosimilitud delmodelo es:
L(θ) = −nT2
log(2π) +
T−1∑j=0
`j(θ) (6.17)
siendo θ el vector de parametros desconocidos,
θ = α′, α′β, (diag Ση)′, (diag Σξ)
′, (diag Σω)′, (vΣε)′
`j = −1
2
[log detGzj + trG−1zj (2πPzj)
], j > 0
`0 = −kβ log(S)− 12 log det(A′βA
′AAβ)− log det Σξ
−(πS)−2trΣ−1ξ (AAβ)+Pz0[(AAβ)+]′
La funcion L(θ) se maximiza con respecto a los elementos de θ. Una opcion posiblees utilizar un metodo de tipo Quasi-Newton como el algoritmo de Gill-Murray-Pitfieldque no necesita una evaluacion explıcita de las derivadas, ya que aquı la construcciondel Hessiano, y con el de un algoritmo de scoring es bastante complicada. Igual que enel modelo de tendencias comunes, una vez estimados los elementos de θ, se utilizarıa unalgoritmo de suavizamiento de intervalo fijo para obtener la estimacion de los factorescomunes.
6.3.2. Metodo basado en el modelo de correccion de error
El metodo que a continuacion se va a desarrollar es una adaptacion del procedimien-to de Gonzalo y Granger para la estimacion de factores comunes estacionales.
Sea xt un vector formado por n series SI(1) con media cero, cointegrado estacio-nal y uniformemente, y con rango de cointegracion r. El vector xt se puede escribir,utilizando un modelo de factores comunes, como:
xtn× 1
= A1n× k
stk × 1
+ xtn× 1
(6.18)
con S(L) st = ωt
siendo ωt un vector de ruidos blancos N(0,Ω).Gonzalo y Granger (1991) para facilitar la estimacion de los factores, proponen uti-
lizar como restricciones para la identificacion de estos modelos:
1. Considerar los factores como combinaciones lineales de las variables originales,es decir, suponer que st = Bxt siendo B de orden k × n.

70 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
2. Suponer queA1st y xt constituyen una descomposicion de xt en sus componentespermanente y transitorio respectivamente.
Ellos demuestran que estas son dos condiciones suficientes para que los factores detendencia esten identificados, pero su demostracion es perfectamente aplicable al casode factores estacionales comunes.
De esta manera, la ecuacion (6.18) se puede escribir:
xtn× 1
= A1n× k
Bk × p
xtp× 1
+ xtn× 1
(6.19)
Definicion 8. (Descomposicion Permanente-transitoria de una serie estacional)Sea xt una serie integrada estacionalmente (SI) de orden uno, es decir, tal que S(L)xt =ωt es estacionaria. Una descomposicion en parte permanente-parte transitoria para xtes un par de procesos estocasticos Pt, Tt tal que:
i) S(L)Pt y Tt son estacionarios en covarianzas,
ii) var(S(L)Pt) y var(S(L)Tt) > 0,
iii) xt = Pt + Tt,
iv)
a) lımh→∞
∂Et(xt+h)
∂εPt6= 0 y b) lım
h→∞
∂Et(xt+h)
∂εTt= 0
siendo Et la esperanza condicionada a la informacion disponible hasta el momen-to t. Donde si ε1t son las innovaciones en el componente permanente y ε2t son las in-novaciones en el componente transitorio, εPt es la parte de las innovaciones de Pt, ε1t,que es ortogonal a las innovaciones de Tt, ε2t, y εTt es la parte de ε2t que es ortogonala ε1t.
Dada la estructura que se ha supuesto para el modelo de factores4, existe cointe-gracion estacional uniforme entre los elementos del vector xt (y ningun otro tipo decointegracion estacional). Una vez impuesto que st = B xt, entonces xt se puede ex-presar como xt = A2α
′xt con zt = α′xt ∼ SI(0) donde α es la matriz que contienelos vectores cointegrantes. Ası solo queda comprobar que combinaciones lineales de xthacen que zt no ejerza un impacto a largo plazo sobre xt. Para ello, a continuacion se vaa desarrollar la representacion de mecanismo de correccion de error (ECM) del modelo.
En la representacion de medias moviles del modelo:
S(L)xt = C(L) εt (6.20)
donde S(L) = 1 + L + L2 + · · · + L11 y el perıodo al que se recogen los datos esS = 12 (mensual), se conoce (Lee, 1992) que si λ1, . . . , λ11 son las raıces unitarias
4Ver proposicion 1 del capıtulo 3.
6.3. EST. DE MOD. CON FACTORES COMUNES ESTACIONALES 71
del polinomio S(L), entonces C(λ1), . . . , C(λ11) son matrices de rango r y tales queα′C(λ1) = 0, . . . , α′C(λ11) = 0.
La representacion autorregresiva del modelo es:
A(L)xt = εt (6.21)
de (6.20) se obtiene que S(L)C(L)−1xt = εt y, por tanto
A(L) = S(L)C(L)−1
y A(L)C(L) = S(L) · I
siendo I la matriz identidad (n×n). Dado que λ1, . . . , λ11 son las raıces del polinomioS(L), se tiene que
A(λ1)C(λ1) = 0
A(λ2)C(λ2) = 0
......
A(λ11)C(λ11) = 0
Como C(λ1), . . . , C(λ11) son combinaciones lineales unas de otras (ya que todas ellasson de rango k y pertenecen al Ker(α′)), A(λj)C(λ1) = 0 para j = 1, . . . , 11; en-tonces A(λ1), . . . ,A(λ11) ∈ Ker(C(λ1)) teniendo en cuenta que, en la representacionautorregresiva, A(λ1), . . . ,A(λ11) tienen todas rango r = n − k (ver Dolado, 1990;Lee, 1992; Johansen, 1988), entonces se puede considerar que A(λ1), . . . ,A(λ11) soncombinaciones lineales, es decir,A(λ2) = A(λ1)D2, . . . ,A(λ11) = A(λ1)D11 siendoD2, . . . , D11 las matrices n× n de ponderaciones.
Para obtener la representacion de la serie como un mecanismo de correccion de error(ECM) se utiliza la transformacion (Ver Hylleberg et al, 1990; Franses, 1990):
A(L) =11∑k=1
θkS(L)
δk(L)+ S(L)A(L)∗∗ (6.22)
siendo δk = [1− (1/λk)L] , θk =A(λk)∏j 6=k δj(λk)
(6.23)
y A∗∗(L) un resto con todas sus raıces fuera del cırculo unidad. Una forma alternativade escribir (6.22) es:
A(L) =
11∑k=1
θkS(L)
δk(L)(1− δk(L)) + S(L)A(L)∗ (6.24)
donde A(L)∗ = A(L)∗∗ +∑11
k=1 θk

72 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
Desarrollando (6.24) en funcion de las raıces de S(L), λ1, . . . , λ11 se obtiene:
A(L) = θ1(−L)S(L)1+L + θ2(1iL) S(L)
1− 1iL
+ θ3(−1iL) S(L)
1+ 1iL
+
+θ4
(1
− 12(1+i
√3)L
)S(L)
1− 1
− 12 (1+i
√3)L
+
+θ5
(1
− 12(1−i
√3)L
)S(L)
1− 1
− 12 (1−i
√3)L
+
+θ6
(1
12(1+i
√3)L
)S(L)
1− 112 (1+i
√3)L
+
+θ7
(1
12(1−i
√3)L
)S(L)
1− 112 (1−i
√3)L
+
+θ8
(1
− 12(√3+i)
L
)S(L)
1− 1
− 12 (√3+i)
L+
+θ9
(1
− 12(√3−i)L
)S(L)
1− 1
− 12 (√3−i)
L+
+θ10
(1
12(√3+i)
L
)S(L)
1− 112 (√3+i)
L+
+θ11
(1
12(√3−i)L
)S(L)
1− 112 (√3−i)
L+A∗(L)S(L)
(6.25)
Como A(L) es real, los pares (θ2, θ3), . . ., (θ10, θ11) son complejos conjugados.Para evitar los terminos complejos de (6.25) se pueden definir las matrices π1, . . . , π11de manera que satisfagan las relaciones:
θ1 = −π1 θ7 = 12(−π6 − iπ7)
θ2 = 12(−π2 + iπ3) θ8 = 1
2(−π8 + iπ9)
θ3 = 12(−π2 − iπ3) θ9 = 1
2(−π8 − iπ9)
θ4 = 12(−π4 + iπ5) θ10 = 1
2(−π10 + iπ11)
θ5 = 12(−π4 − iπ5) θ11 = 1
2(−π10 − iπ11)
θ6 = 12(−π6 + iπ7)
Entonces la ecuacion (6.25) se puede expresar:
A(L) = π1S1(L) + π2S2(L) + · · ·+ π11S11(L) +A∗(L)S(L) (6.26)

6.3. EST. DE MOD. CON FACTORES COMUNES ESTACIONALES 73
donde
S1(L) = L(1 + L2 + L4 + L6 + L8 + L10)S2(L) = L2(1 + L+ L4 + L5 + L8 + L9)S3(L) = L(1 + L+ L4 + L5 + L8 + L9)S4(L) = −L(1 + 2L+ L3 + 2L4 + L6 + 2L7 + L9 + 2L10)
S5(L) = −√32 L(1 + L3 + L6 + L9)
S6(L) = −12L(1− 2L2 − 3L3 − 2L4 + L6 − 2L8 − 3L9 − 2L10)
S7(L) = −√32 L(1 + 2L+ 2L2 + L3 + L6 + 2L7 + 2L8 + L9)
S8(L) =√32 L(1 + 0,4226L+ 0,4226L2 + L3 + 1,1547L5 + 0,1547L6+
0,7320L7 + 0,7320L8 + 0,1547L9 + 1,1547L10)S9(L) = −1
2L(1− 0,7320L+ 1,2679L2 − 0,4641L3 + 0,5359L4 + 0,5359L5−−0,4641L6 + 1,2679L7 − 0,7320L8 + L9)
S10(L) = −√32 L(1 + 1,5773L+ 1,5773L2 + L3 − 1,1547L5 − 2,1547L6−
−2,7320L7 − 2,7320L8 − 2,1547L9 − 1,1547L10)S11(L) = 1
2L(1 + 2,7320L+ 4,7320L2 + 6,4641L3 + 7,4641L4 + 7,4641L5++6,4641L6 + 4,7320L7 + 2,7320L8 + L9)
Anteriormente se ha mencionado que al estar xt cointegrado, las matricesA(λ1), . . . ,A(λ11)son combinaciones lineales unas de otras, esto implica (ec 6.23) que θ1, . . . , θ11 tambienlo son y lo mismo ocurre con π1, . . . , π11. Por tanto, todas las matrices π se pueden ex-presar en funcion de una de ellas, por ejemplo la π1:
π2 = π1Q2, π3 = π1Q3, . . . , π11 = π1Q11 (6.27)
y, por tanto de (6.26) se obtiene
A(L) = π1 [S1(L) +Q2S2(L) + · · ·+Q11S11(L)] +A∗(L)S(L)
donde A∗(L) es un resto con todas sus raıces fuera del cırculo unidad.Cada una de las matrices πj es de rango r y se puede descomponer en:
πjn× n
= γjn× r
α′
r × nj : 1, . . . 11.
donde γj es la matriz que contiene los coeficientes de ajuste en la frecuencia j-esima.Teniendo en cuenta (6.27):
πj = π1Qj = γ α′Qj
dado que en adelante va a ser comun a todas las frecuencias se ha denominado γ alcoeficiente γ1. En esta expresion se comprueba que la matriz de coeficientes de ajustees comun a todas las frecuencias. Teniendo esto en cuenta, se obtiene
A(L) = γ α′ [S1(L) +Q2S2(L) + · · ·+Q11S11(L)] +A∗(L)S(L)
entonces la ecuacion (6.21) se puede expresar:
γ α′ [S1(L) +Q2S2(L) + · · ·+Q11S11(L)]xt +A∗(L)S(L)xt = εt

74 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
y por tanto,
A∗(L)S(L)xt = −γ α′ [S1(L) +Q2S2(L) + · · ·+Q11S11(L)]xt + εt
que tambien se puede escribir como:
S(L)xt = −γ α′ [S1(L) +Q2S2(L) + · · ·+Q11S11(L)]xt +
+
p∑i=1
AiS(L)xt−i + εt (6.28)
suponiendo que A∗(L) es de orden p. Esta es la representacion ECM del modelo.En el modelo de factores comunes inicial,
xt = A1 st + xt (6.29)
una vez impuesto que st = B xt, entonces xt se puede expresar como xt = A2α′ xt
con zt = α′ xt ∼ SI(0). Tomando como base la representacion ECM (6.28), se puedever que las combinaciones lineales de xt que hacen que zt no ejerza un impacto a largoplazo sobre xt son:
st = γ′⊥k × n
xtn× 1
donde γ′⊥γ = 0. Ya que
S(L) st = γ′⊥
p∑i=1
AiS(L)xt−i + γ′⊥εt
El modelo factorial (6.29) se puede escribir:
xtn× 1
= A1n× k
γ′⊥k × n
xtn× 1
+ A2n× r
α′
r × nxtn× 1
(6.30)
Gonzalo y Granger demuestran la proposicion siguiente, que determina cuando existeesta descomposicion, o en otras palabras, cuando (γ′⊥α
′)′ tiene rango completo.
Proposicion 3. Si la matriz π = γn× r
α′
r × nno tiene mas de k = n − r valores propios
iguales a cero, entonces (γ⊥α′)′ es no singular y existe el modelo factorial (6.30).
Si del modelo factorial xt = A1st + A2zt se desea obtener una descomposicionortogonal tal que S(L)st y zt esten incorrelacionados en todos los retardos y adelantos,esto se puede hacer de la siguiente forma. Se proyecta zt sobre S(L)st−j para todo j yse obtienen los residuos
zt = zt − P [zt/S(L)st−j ∀j]
entonces A1st = xt − A2zt y se pueden recuperar los nuevos factores comunes, pre-multiplicando por la inversa generalizada de A1:
st = (A′1A1)−1A′1(xt −A2zt)
es preciso senalar que si zt no son combinaciones lineales de xt, st tampoco lo son. Eslo que se pierde si se requiere ortogonalidad.

6.3. EST. DE MOD. CON FACTORES COMUNES ESTACIONALES 75
6.3.2.1. Estimacion
En esta seccion se muestra como estimar las combinaciones lineales de xt que defi-nen nuestro componente estacional permanente (de largo plazo).
Consideremos el modelo de autorregresion vectorial (VAR):
xt = φ1xt−1 + · · ·+ φmxt−m + εt con t = 1, ..., T
donde ε1, . . . , εT son iiNn(0,Λ) y x−m+1, . . . , x0 son fijos. Es conveniente escribir elmodelo en su forma ECM:
S(L)xt = −π1 [S1(L) +Q2S2(L) + · · ·+Q11S11(L)]xt +
+
p∑i=1
AiS(L)xt−i + εt (6.31)
Debido a que xt esta cointegrado estacionalmente con rango r, la matriz π1 puededescomponerse en π1
n× n= γ
n× rα′
r × ndonde α es la matriz de vectores cointegrantes y
γ son los coeficientes de ajuste.Los parametros (γ, α,Q2, . . . , Q11,A1, . . . ,Ap−1) intervienen de manera indepen-
diente en la funcion de verosimilitud, ası que se puede concentrar el modelo con res-pecto a π1 y Q2, . . . , Q11 eliminando los otros parametros. Esto se hace regresandoS(L)xt, S1(L)xt, . . . , S11(L)xt sobre S(L)xt−1, . . . , S(L)xt−p+1. Esto proporcionalos residuos R0t, R1t, . . . , R11t. El modelo concentrado queda:
R0t = −π1(R1t +Q2R2t + · · ·+Q11R11t) + εt
y su funcion de verosimilitud (Lee, 1992) es proporcional a:
L(Π, D2, . . . , D11,Λ) = |Λ|−T/2 exp
[−1
2
T∑t=1
(R0t + Π(R1t +Q2R2t+
+ · · ·+Q11R11t))′Λ−1(R0t + Π(R1t +Q2R2t + · · ·+Q11R11t))
](6.32)
Dados γ y α′(o π1 ) el estimador maximo-verosımil de Q2, . . . , Q11 es el mınimo-cuadratico ordinario.
Una vez estimados Q2, . . . , Q11, la funcion de verosimilitud se concentra en tornoal coeficiente π1 y el estimador maximo-verosımil es tambien el MCO. Como lo querealmente interesa es el coeficiente π1 se puede concentrar la ecuacion en torno a eltomando:
U0t: residuos de la regresion de R0t sobre R2t, . . . , R11t.
U1t: residuos de la regresion de R1t sobre R2t, . . . , R11t.

76 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
La ecuacion queda:U0t = π1U1t + εt (6.33)
y su funcion de verosimilitud concentrada es proporcional a:
L(Π,Λ) = |Λ|−T/2 exp
[−1
2
T∑t=1
(U0t − π1U1t)′Λ−1(U0t − π1U1t)
](6.34)
Llamaremos Sij a las matrices:
Sij = T−1T∑t=1
UitU′jt (i, j = 0, 1, 2)
y desde aquı se puede utilizar el mismo metodo que utilizan Gonzalo y Granger paraestimar α y γ⊥, es decir, en (6.33) se estima α por regresion de rango reducido (VerAnderson, 1984; Johansen, 1988) y se encuentra resolviendo el problema:
|λS11 − S10S−100 S01| = 0 (6.35)
para los valores propios λ1 > · · · > λn y los vectores V = (v1, . . . , vn). El calculo deestos valores y vectores propios se puede llevar a cabo por el siguiente procedimiento:
En primer lugar, obtener una descomposicion de Choleski de la matriz S11 , es decir,encontrar una matriz S tal que SS′ = S.
Despues, multiplicar la ecuacion (6.35) por la izquierda por S−1 y por la derechapor (S′)−1 obteniendo:
|λ I − S−1S10S−100 S01(S′)−1| = 0
entonces, los valores propios de la matriz S10S−100 S01 con respecto a la matriz S11 sonlos mismos que los de la matriz M = S−1S10S−100 S01(S′)−1 con respecto a la matrizidentidad. Estos valores se hallan por los metodos habituales, ya que cualquier programade ordenador dedicado a la econometrıa o estadıstica (por ejemplo RATS) suele presen-tar un metodo para hallarlos.
SiX es la matriz de los vectores propios deM (ordenados en funcion de sus valorespropios asociados) y D es la matriz diagonal que contiene los valores propios de M(ordenados) en su diagonal principal, entonces ha de cumplirse que
S−1S10S−100 S01(S′)−1X = XD
esto es equivalente a
S−1S10S−100 S01(S′)−1X = S′
((S′)−1X
)D
y multiplicando en ambos lados de la ecuacion, por la izquierda, por S se obtiene
S10S−100 S01
((S′)−1X
)= S11
((S′)−1X
)D

6.3. EST. DE MOD. CON FACTORES COMUNES ESTACIONALES 77
por lo tanto, los vectores propios de S10S−100 S01 con respecto a S11 son (S′)−1X .Los estimadores maximoverosımiles de α, γ y Λ vienen dados por α = (v1, . . . , vr),
γ = S01α y Λ = S00 − γγ′.Bajo la hipotesis nula de cointegracion estacional,
H0 : π1 = γ α′
el estimador de maxima verosimilitud de γ⊥, se encuentra mediante el siguienteprocedimiento:
Primero, resolver la ecuacion
|λS00 − S01S−111 S10| = 0 (6.36)
obteniendo los valores propios λ1 > · · · > λn y vectores propios M = (m1, . . . , mn)normalizados de forma que M ′S00M = I . Ahora la eleccion de γ⊥ es:
γ⊥ = (mr+1, . . . , mn)) (6.37)
La distribucion asintotica de γ⊥ se puede observar en (6.10).
6.3.2.2. Estimacion de factores completos
El metodo de estimacion propuesto en la seccion anterior se puede extender facil-mente para realizar la estimacion de modelos con factores completos, es decir, factoresque son simultaneamente I(1) y SI(1). El modelo planteado serıa entonces:
xt = A1 ft + xt (6.38)
con (1− L12) ft = ωt (6.39)
Es necesario ahora plantear una nueva definicion de descomposicion permanente-transitoria:
Definicion 9. Definicion. Sea xt una serie SI(1) y I0(1), es decir, una serie tal que∆12xt = (1 − L12)xt es estacionaria. Una descomposicion en parte permanente-partetransitoria para xt es un par de procesos estocasticos Pt, Tt tal que:
i) ∆12xt, Pt y Tt son estacionarios en covarianzas.
ii) var(∆12Pt), var(∆12Tt) > 0
iii) xt = Pt + Tt
iv)
a) lımh→∞
∂Et(xt+h)
∂εPt6= 0 y b) lım
h→∞
∂Et(xt+h)
∂εTt= 0
donde ε1t son las innovaciones en el componente permanente, ε2t son las innovacionesen el componente transitorio, εPt es la parte de ε1t que es ortogonal a ε2t y εTt es laparte de ε2t que es ortogonal a ε1t.

78 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
Utilizando el mismo metodo que en el apartado anterior, se busca un factor que seauna combinacion lineal de las variables originales, ft = B xt y que refleje la partepermanente de la descomposicion de las series.
El modelo de correccion de error es ahora:
∆12xt = −π1 [Z1(L) +Q∗2Z2(L) + · · ·+Q∗12Z12(L)]xt +
+
p∑i=1
Ai∆12xt−i + εt (6.40)
donde Q∗2, . . . , Q∗12 son matrices de coeficientes similares a las de la expresion (6.28) y
los polinomios Zj con j : 1, . . . , 12 son5:
Z1 = (1 + L+ L2 + · · ·+ L11)
Z2 = −(1− L+ L2 − L3 + L4 − L5 + L6 − L7 + L8 − L9 + L10 − L11)
Z3 = −(L− L3 + L5 − L7 + L9 − L11)
Z4 = −(1− L2 + L4 − L6 + L8 − L10)
Z5 = −1
2(1 + L− 2L2 + L3 + L4 − 2L5 + L6 + L7 − 2L8 + L9 + L10 − 2L11)
Z6 =
√3
2(1− L+ L3 − L4 + L6 − L7 + L9 − L10)
Z7 =1
2(1− L− L2 − L3 + L4 + L5 + L6 − L7 − L8 − L9 + L10 + L11)
Z8 = −√
3
2(1 + L− L3 − L4 + L6 + L7 − L9 − L10)
Z9 = −1
2(√
3− L+ L3 −√
3L4 + 2L5 −√
3L6 + L7 − L9 +√
3L10 − 2L11)
Z10 =1
2(1−
√3L+ 2L2 −
√3L3 + L4 − L6 +
√3L7 − 2L8 +
√3L9 − L10)
Z11 =1
2(√
3 + L− L3 −√
3L4 − 2L5 −√
3L6 − L7 + L9 +√
3L10 + 2L11
Z12 = −1
2(1 +
√3L+ 2L2 +
√3L3 + L4 − L6 −
√3L7 − 2L8 −
√3L9 − L10)
π1 tiene rango r y se puede expresar como:
π1n× n
= γn× r
α′
r × n
entonces el modelo ECM se puede escribir:
∆12xt = −γ α′ [Z1(L) +Q∗2Z2(L) + · · ·+Q∗12Z12(L)]xt +
+
p∑i=1
Ai∆12xt−i + εt (6.41)
5Se puede ver su obtencion en la seccion 4.4.4

6.3. EST. DE MOD. CON FACTORES COMUNES ESTACIONALES 79
En el modelo de factores comunes (6.38-6.39), una vez impuesto que ft = B xt,entonces xt se puede expresar como xt = A2zt con zt = α′ xt estacionario. Tomandocomo base la representacion ECM (6.41), se puede ver que las combinaciones linealesde xt que hacen que zt no ejerza un impacto a largo plazo sobre xt son:
ft = γ′⊥xt
donde γ′⊥γ = 0. Ya que
∆12ft = γ′⊥
p∑i=1
Ai∆12xt−i + γ′⊥εt
El modelo factorial (6.38-6.39) se puede escribir entonces:
xtn× 1
= A1n× k
γ′⊥k × n
xtn× 1
+ A2n× r
α′
r × nxtn× 1
(6.42)
La estimacion de la matriz γ′⊥ se puede realizar por el mismo procedimiento que elutilizado para los modelos que presentan factores comunes solo estacionales y que se hadescrito en el apartado anterior.

80 CAPITULO 6. ESTIMACION DE MODELOS DE FACTORES COMUNES
Capıtulo 7
Indicadores economicos
7.1. Introduccion
En el analisis de la coyuntura macroeconomica es frecuente trabajar con series deindicadores economicos. El analisis de factores comunes, en este contexto sirve paraconseguir varios objetivos: en primer lugar uno de ellos, que es comun a la mayorıa delos modelos de analisis factorial clasico, consiste en reducir la dimension de un conjun-to de variables mas o menos amplio a un pequeno numero de factores comunes a todasellas; en segundo lugar, un objetivo mas especıfico de este tipo de modelos es com-probar si el componente permanente de diferentes series economicas es comun a todasellas y, en caso de que lo sea, extraerlo y analizarlo. El estudio de estos componentesproporcionara informacion sobre la estructura de largo plazo de todo el conjunto.
La interpretacion de los factores es diferente dependiendo del problema que seeste estudiando. En este Capıtulo se van a realizar dos aplicaciones de modelos de fac-tores comunes a series economicas. La primera de ellas esta basada en el analisis deindicadores cıclicos. Veremos como, en este contexto, un modelo de factores comunespuede servir para obtener un ındice sintetico de actividad de la economıa si se aplicaa series coincidentes con el ciclo, y un indicador adelantado si se aplica a series ade-lantadas respecto al ciclo. En tales modelos, la obtencion de los factores es de interesen sı misma, ya que su analisis puede permitir el conocimiento de aspectos del cicloeconomico que en las propias series no se distinguen, o quedan enmascarados junto alas variaciones transitorias y el componente irregular.
La segunda aplicacion se basa en el estudio de indicadores de produccion. El anali-sis de factores comunes, en este contexto, tiene como objetivo el incorporar en una ovarias series la estructura que es comun a varios indicadores. En Espana no se disponede las publicaciones de los datos del PIB mas que anualmente, es decir no se publicatrimestral o mensualmente. Cuando se necesita utilizar datos de produccion en trabajoseconometricos, se suele utilizar como aproximacion la serie del ındice de produccionindustrial, cuyos datos se publican mensualmente. Sin embargo hay que tener en cuen-ta que la industria en Espana no representa mas que la tercera parte de la produccioninterior, por lo que si se necesita trabajar con datos mas representativos es necesario
81

82 CAPITULO 7. INDICADORES ECONOMICOS
considerar, ademas del IPI, algunas otras variables que no estan en el incluidas y cuyapublicacion es tambien mensual.
En este sentido, el analisis de factores comunes puede llevar a la obtencion de unındice mas general (de largo plazo) de produccion, o al menos a determinar si existenseries guıa que afecten en general a la produccion en varios sectores y, en su caso, a ladeterminacion de cuales son los componentes que guıan a las series de produccion.
7.2. Modelo teorico
Si se observan los graficos de las series de datos que se pueden considerar indicado-res de la realidad economica, se aprecia facilmente que en la mayorıa de ellos existe unafuerte tendencia, ademas de un componente estacional.
Un forma de modelar este tipo de procesos es mediante un modelo estructural. Eneste caso podrıa ser:
xt = µt + st + εt (7.1)
µt = β + µt−1 + ηt (7.2)
S(L) st = ωt (7.3)
siendo xt con t : 1, . . . , T una serie temporal, µt el termino de tendencia de dicha seriey st el componente estacional; εt, ηt y ωt ruidos blancos normal e independientementedistribuidos con media cero y varianzas σ2ε , σ2η y σ2ω respectivamente.
En algunas series se puede apreciar la presencia de una tendencia con pendientevariable a lo largo del tiempo. Para estas series se ajusta mejor que (7.2) una tendenciacon pendiente estocastica:
µt = µt−1 + βt + ηt (7.4)
βt = βt−1 + ξt (7.5)
siendo βt la pendiente de la tendencia1.La existencia de cointegracion entre varias series de este tipo, implica (Capıtulo 3)
la existencia de factores comunes. Por tanto, la relacion existente entre los distintosindicadores de un mismo grupo, en caso de existir cointegracion, se puede expresar pormedio de un modelo de factores comunes. Si existiera cointegracion solo en la frecuenciacero, el modelo podrıa ser:
ytn× 1
= An× k
µtk × 1
+ εtn× 1
(7.6)
µt = µt−1 + ηtk × 1
(7.7)
1Otra posibilidad es plantear un modelo como el definido por (6.1, 6.2 y 6.3) para las series diferencia-das.

7.3. INDICADORES CICLICOS 83
siendo yt el vector n × 1 formado por las series de indicadores I0(1) que pertenecenal mismo grupo, µt el vector k × 1 de factores de tendencia comunes, siendo εt y ηtvectores n × 1 y k × 1 respectivamente con elementos I0(0) y A una matriz n × k deponderaciones.
Si existiera solo cointegracion estacional uniforme el modelo serıa:
yt = Ast + εt (7.8)
S(L) st = ωt (7.9)
donde st es el vector k× 1 de factores comunes estacionales, εt y ωt son vectores n× 1y k × 1 respectivamente, formados por elementos que son SI(0).
Si hay cointegracion completa, el modelo adecuado es:
yt = Aft + εt (7.10)
(1− LS)ft = ut (7.11)
siendo ahora ft el vector k × 1 de factores comunes, εt y ut los vectores n× 1 y k × 1respectivamente, formados por elementos que son simultaneamente I0(0) y SI(0).
La estimacion de los factores, en cualquiera de los tres modelos, se puede realizarpor los procedimientos descritos en el capıtulo 5.
El metodo que se va a utilizar para contrastar la existencia de cointegracion sera elsiguiente: en primer lugar se estimaran por MCO todas las posibles normalizaciones,con coeficiente unitario en una de las variables, de la ecuacion cointegrante entre elconjunto de series considerado. Es decir, si las series son x1t, x2t y x3t, se plantearanlas regresiones:
x1t = α10 + α11 x2t + α12 x3t + u1t (7.12)
x2t = α20 + α21 x1t + α22 x3t + u2t (7.13)
x3t = α30 + α31 x1t + α32 x2t + u3t (7.14)
(7.15)
se utilizaran los residuos de estas ecuaciones para detectar si existe alguna relacion coin-tegrante. En caso de encontrarse alguna, en segundo lugar, se utilizara el estadıstico de latraza de Johansen (1988) para determinar el numero de vectores cointegrantes. La pro-piedad de superconsistencia de los estimadores MCO en ecuaciones de cointegracionpermite mediante la estimacion de las ecuaciones (7.12-7.14) encontrar de forma rapida(si es que lo hay) alguno de los vectores cointegrantes. El metodo de Johansen sera utilentonces para contrastar de manera conjunta el numero de relaciones cointegrantes exis-tente en el conjunto de series dado.
7.3. Indicadores cıclicos
Los agentes que intervienen en actividades economicas, tanto si pertenecen a empre-sas como a la administracion del Estado, se enfrentan a problemas de tipo muy diferente
84 CAPITULO 7. INDICADORES ECONOMICOS
cuando la economıa del Estado esta en crisis que cuando se encuentra en etapa de augeeconomico. En momentos de crisis es normal enfrentarse a restricciones en los gastos,disminucion de empleo, disminucion de inversiones, congelacion de salarios, etc. mien-tras que en etapas de auge economico se suelen aumentar las inversiones, el empleo,salarios, gastos, etc.
La actividad economica de un paıs que basa su organizacion de comercio y produc-cion en una estructura de Economıa de mercado suele presentar, a corto plazo, fasesde crisis y auges que forman fluctuaciones mas o menos pronunciadas en torno a sutrayectoria de largo plazo. Estas fluctuaciones se suelen denominar ciclos economicos.
Los individuos reaccionan de forma diferente cuando la economıa esta en una etapade crisis que cuando esta en un perıodo de auge, por ello es muy importante conoceren que punto del ciclo se encuentra la economıa y hacia donde esta evolucionando.Sin embargo, no es una sola variable la que determina el estado de la economıa. Hay unsinfın de variables macroeconomicas que influyen sobre el estado general de la economıay no existe una unica variable real que indique el nivel en que se encuentra la actividadeconomica. Esto hace que los dos objetivos mas importantes del analisis cıclico sean:
1. Detectar en que etapa del ciclo se encuentra la economıa.
2. Prever la direccion en que se va a mover a corto plazo, en particular detectar lascrisis o auges inminentes.
Entre las tecnicas para realizar el analisis de la coyuntura, una de las de mayortradicion es la utilizacion de indicadores cıclicos. Los indicadores cıclicos son seriesde datos que, midiendo aspectos relevantes de la actividad economica, son capaces dereflejar las variaciones cıclicas de la economıa.
Dentro del analisis de indicadores cıclicos, uno de los problemas que mas atencionha recibido ha sido la determinacion de indicadores cıclicos adelantados. La metodo-logıa usada tradicionalmente es bastante sencilla (ver p.ej. Melis, 1982; DGPC, 1983).En primer lugar se toma un gran numero de series con un reconocido comportamientocıclico. Es decir, un conjunto de series suficientemente largas y donde se aprecien conclaridad los periodos recesivos y expansivos. Se comparan las fechas de los picos y va-lles de cada una de ellas con una cronologıa de referencia. Se eligen aquellas que deforma sistematica preceden a las crisis y/o los auges de la cronologıa de referencia y seagregan de algun modo en un indicador compuesto, que sera el indicador avanzado dela economıa.
Sin embargo, a partir de los anos 70 el perfil de la mayorıa de las series economicasaparece dominado por una fuerte tendencia, por lo que no serıa ya correcto hablar derecesiones y expansiones mas que en un sentido relativo. Aparece ası un nuevo conceptode ciclo economico, llamado ciclo de crecimiento. En el las crisis se caracterizan comoperıodos en los que el ritmo de crecimiento es bajo en relacion a la evolucion global de laserie y las fases expansivas por un ritmo de crecimiento alto en relacion a esa evolucionglobal. Por ello, en el analisis cıclico actual es normal ver trabajos en los que el ciclode referencia es un ciclo en terminos de crecimiento respecto a una trayectoria global, otasas de crecimiento.
7.3. INDICADORES CICLICOS 85
Uno de los requisitos fundamentales que han de cumplir los indicadores economicoses la disponibilidad de sus datos a frecuencia mensual. Esto implica la aparicion en lasseries de un componente estacional que, unido al irregular, dificulta la observacion desu trayectoria de largo plazo.
Sin embargo, el tipo de ciclo que el analisis de indicadores trata de detectar corres-ponde a fluctuaciones que suelen ser de perıodo superior al ano. Por eso, suele interesartrabajar con datos desestacionalizados y suavizados (a los que se ha extraıdo el compo-nente estacional e irregular). Ya en 1982, Melis propuso utilizar las tasas de crecimientointeranual en lugar de las series obtenidas directamente de la realidad. Pero a la luz delas ultimas teorıas sobre raıces unitarias estacionales (Engle et al, 1989; Hylleberg et al,1990) toma mayor relevancia el hecho de que una diferencia estacional (lo que Me-lis 1982 utiliza para obtener las tasas interanuales) extrae de la serie S raıces unitarias([S − 1] estacionales y una en la frecuencia cero). Esto puede no ser lo mas adecuado sila serie no presenta raıces unitarias en todas las frecuencias estacionales, ya que apareceun componente de media movil no invertible que puede llegar a inducir un ciclo estacio-nal en principio inexistente. Ademas, con este filtro no se desestacionaliza totalmente laserie, ya que despues de pasar el filtro puede quedar aun un componente estacional detipo estacionario (con todas sus raıces fuera del cırculo unidad).
Fernandez Macho (1991) propone trabajar con el crecimiento anual de la tendencia(CAT) de las series; utilizando los modelos estructurales de series temporales (MEST)para extraer la tendencia y la tasa de crecimiento subyacente de las series y, posterior-mente, trabajar con las tasas de crecimiento subyacentes como estimaciones del CAT.
7.3.1. Cointegracion en sistemas de indicadores
Siguiendo el esquema tradicional (por ejemplo el presentado por Melis, 1982; DGPC,1983; Fernandez Macho, 1991), es posible realizar una clasificacion de los indicadoreseconomicos en funcion de su comportamiento respecto al ciclo economico. Distinguire-mos tres grandes grupos:
1. Indicadores coincidentes con el ciclo. Los picos y valles se encuentran aproxima-damente en las mismas fechas que las de la cronologıa de referencia.
2. Indicadores adelantados. Las epocas de crisis o de auge economico se presentan,en general, en fechas anteriores a las de la cronologıa de referencia.
3. Indicadores retrasados. Las expansiones y recesiones se presentan, en general,en fechas posteriores a las de la cronologıa de referencia.
Una vez obtenida una clasificacion, dentro de un grupo determinado todas las varia-bles se comportaran de modo parecido respecto al ciclo de referencia. Los picos y vallesestaran uniformemente adelantados en las series del grupo 2 y uniformemente retrasadosen las del grupo 3. Dicho de otra forma, las series de un mismo grupo seguiran apro-ximadamente una evolucion comun, aparentando un equilibrio a largo plazo. Si variasseries no estacionarias estan en equilibrio a largo plazo, deben cumplir una relacion de
86 CAPITULO 7. INDICADORES ECONOMICOS
cointegracion. Por tanto, cabe la posibilidad de que variables pertenecientes al mismogrupo esten cointegradas. Ademas, como se ha visto en el Capıtulo 2, la existencia decointegracion implica la presencia de factores comunes a todas las series del grupo. Esposible que sea solo un pequeno numero de factores comunes el que determine la sendapor la que se mueven a largo plazo todos los componentes del grupo.
En el contexto de indicadores economicos, los factores comunes pueden tener unainterpretacion bastante logica. Por ejemplo, supongamos que el grupo de series coin-cidentes con el ciclo presentara un unico factor comun; ese factor podrıa interpretarsecomo un (unico) indicador de la actividad economica a largo plazo. Si existiera un fac-tor comun en el grupo de indicadores adelantados, este factor se podrıa considerar comoun representante de todo el grupo, proporcionando ası un nuevo indicador adelantado(sintetico) que recogerıa la estructura de largo plazo comun a todas las series del grupo.En el grupo de indicadores retrasados se puede hacer una interpretacion similar.
7.3.2. Analisis de los indicadores de la Economıa Espanola
7.3.2.1. Punto de partida
En este apartado se partira de la clasificacion realizada por Fernandez Macho (1991)para comprobar las posibles relaciones de cointegracion y los posibles factores comunesexistentes en el grupo de indicadores que constituye su ciclo de referencia, en el grupo deindicadores adelantados y en el grupo de retrasados. Fernandez Macho utilizando datosdesde 1968 hasta 1989 y proyecciones para el ano 1990 construye en primer lugar unciclo de referencia basado en el CAT (crecimiento anual de la tendencia) de un conjuntode series afines a la produccion, el empleo y el consumo (Toma como base las mismasseries utilizadas en 1983 por la Direccion General de Prevision y Coyuntura (DGPC)):
a) IPI: Indice general de produccion industrial.
b) DEMELE: Demanda de energıa electrica.
c) DISCEM: Disponibilidades de cemento
d) PERHOT: Pernoctaciones en establecimientoes hoteleros.
e) TRAMER: Transporte de mercancıas por ferrrocarril.
f) IMNENE: Importaciones reales no energeticas.
g) CREPRI: Credito al sector privado (deflactado por el IPRI general).
h) PARNAG: Paro registrado no agrario (considerado inversamente).
Para constituir el ciclo de referencia se siguen las recomendaciones del grupo detrabajo sobre analisis cıclico de la OCDE, segun las cuales el ciclo de referencia deberıareflejar la produccion, en un sentido amplio del termino. Se ha seleccionado un conjun-to de series representativas de los sectores de la industria, de la construccion y de losservicios, tratando con ello de reflejar la evolucion del PIB no agrario, puesto que el
7.3. INDICADORES CICLICOS 87
sector primario suele excluirse de este tipo de estudios por su comportamiento especıfi-co, ajeno, en gran medida, a las fluctuaciones cıclicas de la economıa en general. Se hadescartado la utilizacion del IPI como unico indicador fundamentalmente debido a suinsuficiente cobertura, ya que la actividad industrial representa en torno al 30 por cientodel PIB.
Tomando como base las ocho series mencionadas, se construye un ındice mensual deactividad y, apartir de el, el ciclo CAT de referencia. El fechado de los puntos crıticos delciclo CAT determina la cronologıa de referencia de las aceleraciones y desaceleracionesen la actividad economica.
Esta cronologıa de referencia sirve para determinar el grupo al que pertenecen los31 indicadores parciales estudiados, correspondientes a todas las ramas de actividad dela economıa.
El grupo de los indicadores adelantados esta formado por 12 series, de las cualesFernandez Macho utiliza solo 5 para construir su indicador sintetico adelantado. Te-niendo en cuenta la dificultad que supone, en el analisis de cointegracion, trabajar conun numero de series elevado, aquı se consideraran como integrantes del grupo solamenteestas cinco ultimas:
a) COLOCA: Colocaciones totales. Es un representante del empleo.
b) PROIND: Tendencia de la produccion industrial. Representante de produccion yconsumo.
c) NIVCON: Opiniones empresariales sobre el nivel de contratacion en la produc-cion.
d) STOCON2: Opiniones empresariales sobre el stock de productos terminados deconsumo (tratado inversamente). Representante de la inversion en inventarios.
e) M3d: Disponibilidades lıquidas (deflactadas por el IPC). Representante de la cir-culacion de medios de pago.
Nueve de los 31 indicadores estudiados se pueden considerar retrasados respecto ala cronologıa de referencia. De ellos solo se seleccionan cinco para formar el indicadorsintetico retrasado. En el presente trabajo se consideraran solo estas cinco series comointegrantes del grupo de indicadores retrasados respecto al ciclo economico. Las seriesson:
a) IVEGAL: Indice de ventas en grandes almacenes. Representante de la producciony el consumo.
b) STOCON: Opiniones empresariales sobre el stock de productos terminados deconsumo. Representante de la inversion en inventarios.
2Fernandez Macho (1991) clasifica la variable STOCON multiplicada por -1 como adelantada respectoal ciclo, con un adelanto mediano de +3.5 meses. Sin embargo, clasifica la variable STOCON originalcomo retrasada respecto al ciclo, con un retraso mediano de -11.5 meses. Como en el contexto de factorescomunes no es relevante el signo de la variable (quedara determinado en la estimacion de la matriz deponderaciones) aquı se utiliza la misma variable en el grupo de adelantados y en el de retrasados.
88 CAPITULO 7. INDICADORES ECONOMICOS
c) IPC: Indice general de precios al consumo. Representante del nivel de precios.
d) IMPORT: Importaciones totales.
e) EXPORT: Exportaciones totales. Los dos ultimos, representantes del comerciocon el exterior.
7.3.2.2. Estudio de cointegracion
El analisis de cointegracion se va a iniciar tomando como base el conjunto de seriesque formaron el ciclo de referencia. Los datos utilizados son de periodicidad mensual ycomprenden desde Enero de 1977 hasta Noviembre de 1991 (167 observaciones). Lasocho series del grupo (en logaritmos), ası como sus correlogramas, periodogramas y losde su primera diferencia se representan en el apendice de graficos B, en las paginas 123a 130. En todas ellas, excepto quizas TRAMER, se nota claramente una tendencia; en al-gunas de las series creciente (IPI, DEMELE, IMNENE, PARNAG) y en otras con tramoscrecientes y decrecientes (DISCEM, CREPRI). En todas se aprecia la existencia de uncomponente estacional, aunque en series como DISCEM o TRAMER de caracter masdebil que en las demas. Observando los correlogramas de las series y de sus primerasdiferencias, se aprecian fuertes componentes estacionales en las series IPI, DEMELE,PERHOT, CREPRI y PARNAG.
Para cada una de las series se estimara por MCO la ecuacion (5.21). Se va a utilizarel estadıstico t del coeficiente γ0 de la ecuacion para contrastar la existencia de una raızunitaria en la frecuencia cero, y el estadıstico FD de los coeficientes γ1, . . . , γ11 paracontrastar la existencia de integracion estacional uniforme (ver seccion 5.4).
7.3.2.2.1. El ciclo de referencia.
El Cuadro 7.1 muestra los valores calculados para los estadısticos t(γ0) y FD. Parala serie TRAMER, al nivel de significacion del 5 % se rechaza la existencia de una raızunitaria en la frecuencia cero y de once raıces unitarias estacionales. Por tanto, se puedeconsiderar que es I0(0) y SI(0). Para el resto de las series no se rechaza la existenciade raız unitaria en la frecuencia cero.
Para las series DEMELE, PERHOT, CREPRI e IPI no se rechaza la hipotesis deintegracion estacional. Se puede considerar que son SI(1). Para el resto (DISCEM,IMNENE, PARNAG) se rechaza dicha hipotesis al nivel de significacion del 5 %, portanto son SI(0).
A continuacion, para las series en las que se ha aceptado la presencia de una raızunitaria en la frecuencia cero, se comprueba si existe una segunda raız unitaria en dichafrecuencia. Para ello se estima la ecuacion (6.29) con las series en diferencias. En casode aceptarse la segunda raız unitaria se efectua el contraste para la tercera. Los resultadosse muestran en el Cuadro 7.2.
En resumen, tenemos una serie I0(0) (TRAMER), tres series I0(1) (DEMELE, IM-NENE y DISCEM), y cuatro series I0(2) (PERHOT, CREPRI, PARNAG e IPI). En
7.3. INDICADORES CICLICOS 89
Cuadro 7.1: Contraste de raız unitaria en la frecuencia cero y de integracion estacionaluniforme
t(γ0) FDIPI −0,77 0,21DEMELE −0,13 1,89DISCEM 0,76 6,25*PERHOT −1,66 2,43TRAMER −3,17* 4,81*IMNENE 0,53 5,09*CREPRI −1,46 2,81PARNAG −1,89 10,60*El valor crıtico del estadıstico t(γ0) para T = 240 obs. al α = 5 % es de −2,80
(Beaulieu y Miron, 1993). El valor crıtico del estadıstico FD para α = 5 %
y T = 200 obs. es 3,23 y para T= 150 obs. es 3,12 (Cap.4).
cuanto al componente estacional, cuatro series son SI(0) (TRAMER, DISCEM, IM-NENE y PARNAG) y las otras cuatro son SI(1) (DEMELE, PERHOT, CREPRI e IPI).
Cointegracion completa.
Solamente hay tres series integradas del mismo orden estacionalmente y en la fre-cuencia cero: PERHOT, IPI y CREPRI. Se han estimado por MCO las tres posiblesnormalizaciones de la ecuacion cointegrante entre las tres series, obteniendose los si-guientes resultados:
V. Dependiente t(γ0) FD DHFPERHOT −1,21 0,43 −0,81IPI −2,21 0,32 −0,98CREPRI −0,80 0,26 −1,20
Cuando, con base en los residuos, se desea contrastar la hipotesis de cointegracioncompleta, el metodo adecuado es un contraste conjunto de integracion en la frecuen-cia cero e integracion estacional, o dicho de otra forma, un contraste conjunto de laexistencia de once raıces unitarias estacionales y una en la frecuencia cero. Esto es pre-cisamente lo que se plantea en el contraste propuesto por Dickey, Hasza y Fuller (1984)(ver Capıtulo 4 seccion 4.2). Uno de los metodos que plantean, y que utilizaremos aquı,se basa en el estadıstico t del coeficiente α de la ecuacion: yt = αyt−S + εt. Para elcaso que nos ocupa, con datos mensuales y sin variables ficticias estacionales, el valorcrıtico del estadıstico t en las tablas calculadas por Dickey-Hasza-Fuller al nivel de sig-nificacion del 5 % es de−1,41. El estadıstico t de Dickey-Hasza-Fuller figura en la tablaanterior bajo el nombre DHF.
En los residuos de las tres ecuaciones, tanto usando los estadısticos t(γ0) y FD comoel estadıstico DHF se acepta la existencia de raıces unitarias estacionales y en la frecuen-
90 CAPITULO 7. INDICADORES ECONOMICOS
Cuadro 7.2: Varias raıces unitarias en la frecuencia cero
t(γ0) Resultados al α = 5 %
∆ DEMELE −3,69 → DEMELE es I0(1)∆ PERHOT −2,77∆ IMNENE −5,43 → IMNENE es I0(1)∆ CREPRI −1,44∆ PARNAG −1,88∆ IPI −1,70∆ DISCEM −5,38 → DISCEM es I0(1)
∆2 PERHOT −5,72 → PERHOT es I0(2)∆2 CREPRI −6,63 → CREPRI es I0(2)∆2 PARNAG −7,86 → PARNAG es I0(2)∆2 IPI −8,75 → IPI es I0(2)
cia cero, por tanto no hay cointegracion completa entre estas tres series. Sin embargo,aun no se puede determinar si existe cointegracion solo en la frecuencia cero o soloen las frecuencias estacionales. Del teorema demostrado por Engle, Granger y Hallman(1989, Pag. 50) se deduce que si no existe cointegracion en la frecuencia cero, aunqueexista en las estacionales, los estimadores de la ecuacion cointegrante son inconsisten-tes; de la misma forma, si no existe cointegracion estacional, aunque haya cointegracionen la frecuencia cero, los estimadores MCO de la ecuacion cointegrante son inconsis-tentes. Esto implica que para estimar la ecuacion cointegrante estacional (cuando no haycointegracion completa) es necesario extraer de cada serie las raıces unitarias de la fre-cuencia cero y para estimar la ecuacion cointegrante de la frecuencia cero es necesarioextraer las raıces unitarias estacionales.
Cointegracion estacional
De las ocho series que forman el grupo, se ha comprobado que cuatro de ellas sonintegradas estacional y uniformemente, SI(1): DEMELE, PERHOT, IPI y CREPRI.
Como DEMELE tiene una raız unitaria en la frecuencia cero, es necesario tomaruna diferencia (o filtro (1−L)) para incorporarla en la ecuacion cointegrante estacional.PERHOT, IPI y CREPRI tienen dos raıces unitarias en la frecuencia cero y, por tanto, sevan a diferenciar dos veces (filtro (1− L)2).
Se han estimado las cuatro posibles ecuaciones cointegrantes estacionales y calcu-lado los estadısticos FD de sus residuos:

7.3. INDICADORES CICLICOS 91
V. Dependiente FD de los residuos∆2 PERHOT 2,75∆2 IPI 0,61∆2 CREPRI 2,40∆ DEMELE 1,96
Al nivel de significacion del 5 % en ninguno de los cuatro casos se puede rechazarla hipotesis de integracion estacional uniforme en los residuos, por lo tanto no se aceptala existencia de cointegracion estacional entre las cuatro series.
Cointegracion en la frecuencia cero
En el conjunto de series considerado, hemos visto que hay tres que son I0(1): IMNE-NE, DISCEM y DEMELE; y cuatro que son I0(2): PARNAG, PERHOT, IPI y CREPRI.
Antes de empezar el analisis es necesario extraer de cada una de las series las raıcesunitarias estacionales. Se ha comprobado que DEMELE, PERHOT, IPI y CREPRI sonSI(1), por tanto, para extraer sus raıces unitarias estacionales lo adecuado es aplicarlesel filtro S(L) = 1 +L+ · · ·+ L11. Sin embargo, todo lo que se sabe hasta ahora de lasseries PARNAG, IMNENE y DISCEM es que son SI(0) o, dicho de otra forma, que nocontienen once raıces unitarias estacionales. Por tanto, aun cabe la posibilidad de quecontengan un numero inferior de raıces unitarias estacionales y, si esto es cierto, tambienes necesario extraer esas raıces antes de continuar con el analisis de la frecuencia cero.Para comprobar el numero de raıces unitarias que contiene cada una de las series utili-zaremos los contrastes de HEGY (ver seccion 4.4.4 del presente trabajo). Aplicandolosa las series mencionadas se han obtenido los valores del Cuadro 7.3.
Cuadro 7.3: Resultados de los contrastes de HEGY
Serie Fπ/6 Fπ/3 Fπ/2 F2π/3 F5π/6 tπPARNAG 2,88* 12,93 10,95 5,96 10,70 2,15*IMNENE 9,43 1,95* 3,01 4,73 2,84* −2,02DISCEM 2,43* 2,94* 1,34* 17,36 4,70 −1,37*(*): no significativo al α = 5 %.
El valor crıtico del estadıstico F para α=5 % , ω = π/6, . . . , 5π/6 y T = 240
es 3,01. El valor crıtico del estadıstico t par a α=5 % y T = 240 es -1.89
(Beaulieu y Miron, 1993)
En la serie PARNAG se presentan dos raıces unitarias en las frecuencias±π/6 y unaen la frecuencia π. El filtro necesario para extraer estas raıces es3:
(1−√
3L+ L2)(1 + L) =(
1 + (1−√
3)L+ (1−√
3)L2 + L3)
3Ver ecuaciones 5.25 en el apendice 5.A

92 CAPITULO 7. INDICADORES ECONOMICOS
La serie IMNENE contiene raıces unitarias en las frecuencias ±π/3 y ±π/6. Elfiltro correspondiente a estas frecuencias es:
(1−L+L2)(1+√
3L+L2) =(
1− (1−√
3)L+ (2−√
3)L2 − (1−√
3)L3 + L4)
La serie DISCEM presenta raıces unitarias en las frecuencias ±π/6, ±π/3, ±π/2 yπ; y por tanto, el filtro adecuado a esta serie es:
(1−√
3L+ L2)(1− L+ L2)(1 + L2)(1 + L) =
=(1−√
3L+ 2L2 + (1−√
3)L3 + (1−√
3)L4 + 2L5 −√
3L6 + L7)
Una vez aplicados estos filtros, se estiman las posibles ecuaciones cointegrantes.En primer lugar, se han considerado las relaciones entre las series que son I0(2):
PARNAGf , PERHOTf , IPIf y CREPRIf (el subındice f indica que se han transfor-mado con los filtros antes mencionados). Se han estimado por MCO las cuatro norma-lizaciones posibles entre estas series. Se va a utilizar el estadıstico t0 de HEGY paracomprobar la existencia de raıces unitarias en los residuos de las ecuaciones cointegran-tes. El estadıstico t0 ha tomado los siguientes valores:
Vble. endogena Estadıstico t0 de los residuosPARNAGf −1,78PERHOTf −1,17IPIf −1,28CREPRIf −1,09
Valor crıtico del estadıstico t para α=5 % y T = 240: -2.80
(Beaulieu y Miron, 1993)
En ninguno de los cuatro casos se puede rechazar la existencia de una raız unitaria en lafrecuencia cero en los residuos, por tanto no existe cointegracion de tipo C(2, 2) entreestas series. Para comprobar la cointegracion de tipo C(2, 1) se toma una diferencia encada una de ellas y se plantean y estiman de nuevo las ecuaciones. Se han obtenido lossiguientes valores para el estadıstico t0:
Vble. endogena Estadıstico t0 de los residuos∆ PARNAGf −2,52∆ PERHOTf −3,89∆ IPIf −2,79∆ CREPRIf −1,96
Como se puede observar, al nivel de significacion del 5 % se rechaza la existencia deuna raız unitaria en la ecuacion que tiene a ∆PERHOTf como variable dependiente. Enlas ecuaciones que tienen a ∆PARNAGf y ∆IPIf como variables dependientes el valordel estadıstico, aunque es superior, esta muy cercano al valor crıtico. Sin embargo, hayque tener en cuenta que se estan haciendo contrastes individuales para cada uno de losvectores cointegrantes, cuando, en caso de haber mas de uno es mas adecuado proponer

7.3. INDICADORES CICLICOS 93
un contraste conjunto. Por tanto, cabe esperar que no estemos muy lejos de la realidadsi, en base a los valores que ha tomado el estadıstico t0, suponemos que los residuosde las ecuaciones que toman como variables dependientes a ∆PARNAGf y ∆IPIf nocontienen raıces unitarias en la frecuencia cero. En tal caso habrıa tres distintos vectorescointegrantes.
Una forma mas adecuada de comprobar esto es por medio de uno de los procedi-mientos de Johansen (1988). Johansen construye dos estadısticos que sirven para de-terminar el rango de cointegracion (numero de vectores cointegrantes) existente entreun determinado numero de series temporales. Aquı se va a utilizar el que se denominaestadıstico de la traza. Su formula viene dada por:
t(r) = −Tn∑
h=r+1
ln(1− λh)
siendo n el numero de series que se estan considerando, r el posible rango de cointegra-cion (se calculara el estadıstico para distintos valores de r) y λ1, . . . , λn son los valorespropios ordenados de la matriz S10S−100 S01 con respecto a S11, siendo estas matrices Sijlas definidas en la ecuacion (6.8).
Bajo la hipotesis nula de que como maximo hay r vectores cointegrantes, la dis-tribucion asintotica del estadıstico viene dada por una expresion que incluye integralesestocasticas de movimientos Brownianos de la siguiente forma:∫
dB F ′[∫
FF ′ du
]−1 ∫F dB′
donde B es un vector de movimiento Browniano, y F es una funcion de B que incluyediferentes componentes deterministas para diferentes hipotesis nulas. La aproximaciona esta distribucion por medio de simulaciones ha sido tabulada por Johansen (1988) ypor Osterwald-Lenum (1992).
En el caso que nos ocupa, el estadıstico de la traza ha tomado los siguientes valores4:(se ha restado la media a cada variable)
t(0) = 586,23 V.Crıtico t(0) (5 %) = 47,21t(1) = 239,23 V.Crıtico t(1) (5 %) = 29,68t(2) = 86,51 V.Crıtico t(2) (5 %) = 15,41t(3) = 0,72 V.Crıtico t(3) (5 %) = 3,76
Por tanto, se rechazan las hipotesis de que como maximo hay 0, 1 y 2 vectorescointegrantes y no se rechaza la hipotesis de que el rango de cointegracion sea comomaximo 3. Esto ratifica la conclusion que se habıa obtenido al analizar los residuosMCO de las ecuaciones cointegrantes, es decir, que existen tres vectores cointegrantes.
Dado que el numero de factores comunes a n series es n menos el rango de cointe-gracion, esto implica la presencia de un unico factor de tendencia comun a estas cuatroseries.
4Valores crıticos tomados de Osterwald-Lenum (1992)
94 CAPITULO 7. INDICADORES ECONOMICOS
Utilizando el metodo de Gonzalo y Granger (1995) (ver seccion 6.2.2) se ha esti-mado el factor de tendencia comun (para ello se ha restado a cada variable su media),obteniendo como resultado:
factor = −8,33∆PARNAGf − 5,39∆PERHOTf +
+5,10∆IPIf − 187,67∆CREPRIf (7.16)
Se ha representado graficamente esta serie en la pagina 131, dado que para las seriesque forman el factor se disponıa de datos desde mayo de 1972, se han anadido estosdatos en la representacion grafica del mismo. Siguiendo a lo largo del tiempo la evo-lucion de este, se aprecia en primer lugar un decrecimiento de la serie, alcanzando unmınimo local a mediados del 75. Esto significa que el ritmo de crecimiento de la acti-vidad economica fue disminuyendo hasta alcanzar esta fecha, probablemente debido alprimer impacto de la crisis del petroleo. Entre finales del 75 y principios del 76 se notauna pequena recuperacion, alcanzando un maximo local en mayo del 76. Sin embargo, apartir de esa fecha continua decreciendo la trayectoria del factor hasta alcanzar un mıni-mo en marzo del 78. Esto puede corroborar lo que muchos observadores economicoshan comentado, el retraso en llegar a Espana de la crisis del petroleo. Dado el fuerteritmo de crecimiento de la economıa espanola en los anos setenta, la crisis del petroleono significo en principio una fuerte caıda en los niveles de actividad, sino simplementeuna disminucion en la tasa de crecimiento de esta actividad, que solo al cabo de unosanos (77-78) pudo tener consecuencias en terminos de nivel. En la trayectoria del factorse detectan con bastante claridad las tres grandes etapas de la economıa espanola a lolargo de los ultimos anos. Una primera etapa de alto crecimiento, aproximadamente has-ta finales de 1976; una fase de estancamiento desde principios del 77 hasta finales del84; y una fase de recuperacion que comienza a principios de 1985 y alcanza su maxi-mo ritmo de crecimiento en el primer semestre de 1989. A partir de los ultimos mesesdel 89 se distingue una fuerte disminucion en la tasa de crecimiento de la economıa,manteniendose hasta el final de la muestra estudiada.
Se puede comparar el factor comun aquı estimado con el ciclo CAT de referenciautilizado en Fernandez Macho (1991). Para ello hay que tener en cuenta que en la elabo-racion del ciclo CAT las tasas anuales estan centradas respecto al ano, lo cual supone unretraso respecto a las transformaciones que aquı se utilizan (y al factor comun) de seismeses. La situacion relativa de los maximos y mınimos locales es aproximadamente lamisma en ambos ciclos. Fundamentalmente se detectan dos maximos, aproximadamenteen los anos 81-82 y 88-89 y dos mınimos en los anos 77 y 84. La mayor diferencia entreambas series esta en la importancia relativa dada al mınimo del ano 75, que en el cicloCAT llega a ser el mınimo global del perıodo analizado y sin embargo en nuestro factorcomun, aunque se detecta, parece tener poca importancia. Hay que tener en cuenta quela diferencia fundamental entre las dos series es que en la de Fernandez intervienen lasocho series del grupo con las mismas ponderaciones y sin embargo en el factor aquı esti-mado intervienen solo las cuatro series que son I0(2), y la ponderacion otorgada a cadauna no se ha fijado de antemano, sino que ha sido determinada en base a los coeficientesque se derivan del modelo de correccion de error.
El modelo de correccion de error correspondiente a este conjunto de series sigue la
7.3. INDICADORES CICLICOS 95
ecuacion:∆xt = γ zt−1 + Γ1∆xt−1 + · · ·+ Γq∆xt−q + εt (7.17)
siendo xt = (∆PARNAGf ,∆PERHOTf , IPIf , CREPRIf )′ y zt = α′xt siendoα′ la matriz que tiene como filas los vectores cointegrantes. La estimacion de las rela-ciones cointegrantes (por el metodo de Johansen 1988) ha proporcionado los siguientesresultados:
z1t = 752,9∆PARNAGf + 1481,4∆PERHOTf + 18818,7∆IPIf
+1476,2∆CREPRIf
z2t = 352,0∆PARNAGf + 1292,6∆PERHOTf + 12027,2∆IPIf
−965,4∆CREPRIf
z3t = 839,1∆PARNAGf + 8233,2∆PERHOTf + 9351,6∆IPIf
−362,8∆CREPRIf
En la estimacion de los coeficientes del modelo de correccion de error (7.17), se hautilizado el estadıstico Q de Ljung-Box para determinar el numero de retardos autorre-gresivos q a incluir en la ecuacion, y se han obtenido los siguientes valores estimados5:(N.Obs utiles = 148, Grados de libertad = 76, q = 18)
∆2(PARNAGf )t = 0,88z1t−1 + 6,57z2t−1 + 26,9z3t−1 +
+retardos de(∆2(PARNAGf )t,∆
2(PERHOTf )t,
∆2(IPIf )t,∆2(CREPRIf )t
)+ ε1t
∆2(PERHOT ) = 2,38z1t−1 + 7,64z2t−1 + 1,21z3t−1 +
+retardos de(∆2(PARNAGf )t,∆
2(PERHOTf )t,
∆2(IPIf )t,∆2(CREPRIf )t
)+ ε2t
∆2(IPI) = 114,11z1t−1 − 111,46z2t−1 + 60,95z3t−1 +
+retardos de(∆2(PARNAGf )t,∆
2(PERHOTf )t,
∆2(IPIf )t,∆2(CREPRIf )t
)+ ε3t
∆2(CREPRI) = 34,39z1t−1 + 26,65z2t−1 + 0,56z3t−1 +
+retardos de(∆2(PARNAGf )t,∆
2(PERHOTf )t,
∆2(CREPRIf )t)
+ ε1t
5Las variables se han expresado en desviaciones con respecto a sus medias.

96 CAPITULO 7. INDICADORES ECONOMICOS
El vector de ponderaciones se ha estimado aplicando MCO a la ecuacion:
xt = κ+A1ft +A2zt + ut (7.18)
en el modelo factorial se ha anadido un vector de constantes κ debido a que las variables6
no parecen tener media cero, el resultado de la estimacion de los vectores κ y A ha sido:
A1 =
0,410E − 03(0,55E − 11)
−0,628E − 03(0,85E − 11)
0,824E − 04(0,11E − 11)
−0,536E − 02(0,73E − 10)
; κ =
0,404E − 02(0,49E − 10)
0,152E − 01(0,75E − 10)
0,618E − 02(0,98E − 11)
0,196E − 01(0,64E − 09)
En los graficos de las paginas 131-133 se representan las cuatro series filtradas y
diferenciadas, con el factor comun ponderado por el peso correspondiente a cada varia-ble mas la constante. Tanto en los graficos como en los propios coeficientes del factor(7.16) se aprecia como esta fundamentalmente dominado por la variable ∆CREPRIf .Para comprobar si se puede considerar que ∆CREPRIf es realmente el factor comuna las cuatro series, se ha estimado la ecuacion (7.18) sustituyendo el factor ft por lavariable ∆CREPRIf . Si esto fuera cierto, el vector de perturbaciones de dicha ecuacionhabrıa de ser ruido blanco. Sin embargo, los residuos de las ecuaciones que tienen comovariables endogenas a ∆IPIf y ∆PARNAGf muestran autocorrelacion (Q(36) = 288,5en el IPI y Q(36) = 87,24 en PARNAG) y el estadıstico t(γ0) aplicado a estas seriesde residuos toma los valores−1,32 y−2,58 respectivamente, reflejando la existencia deuna raız unitaria en cada una de ellas. La variable ∆CREPRIf por sı sola no es capaz derecoger toda la estructura de largo plazo de las series ∆IPIf y ∆PARNAGf y, por tanto,no se puede considerar que ella sea el factor comun. La varianza total del conjunto se haestimado en 0,0143 y la explicada por el factor ha sido 0,0022, que supone el 15, 81 %del total.
Multiplicando el factor por el coeficiente correspondiente a ∆PARNAGf en la ma-triz de ponderaciones, se obtiene una forma de expresar el factor acorde con las restric-ciones mencionadas en el capıtulo 2, es decir, un factor cuya matriz de ponderacionesesta formada por la primera columna de una matriz triangular hacia abajo y con los ele-mentos de la diagonal unitarios (Ecuacion 2.8). Entonces el modelo de factores comunesse puede escribir:
xt = κ+A∗1 f∗t + νt (7.19)
siendo f∗t = 0,410E − 03 ft, νt un vector de elementos I0(0) y
A∗1 =
1,00−1,53
0,2013,07
6Aquı se han tomado las variables originales, sin restarles las medias.
7.3. INDICADORES CICLICOS 97
Como las variables PERHOT, IPI, CREPRI y PARNAG forman un conjunto cointe-grado de tipo C(2, 1), los residuos de las ecuaciones cointegrantes planteadas en nivelesson I0(1) y, a su vez, pueden estar cointegrados con otras variables de tipo I0(1), comopueden ser IMNENE, DISCEM y DEMELE. De esta forma, es posible que las siete va-riables formen un conjunto cointegrado aun cuando no son todas integradas del mismoorden.
Denominaremos εPAR a la serie de residuos de la ecuacion cointegrante que tie-ne como variable dependiente a PARNAGf y como variables explicativas a PERHOTf ,IPIf y CREPRIf ademas de una constante. Llamaremos εPER a la serie de residuos dela ecuacion que tiene como variable dependiente a PERHOTf y como variables expli-cativas a PARNAGf , IPIf y CREPRIf ; y denominaremos εIPI a la serie de residuos dela ecuacion que tiene como variable dependiente a IPIf y como variables explicativas aPARNAGf , PERHOTf y CREPRIf .
Consideraremos los tres posibles conjuntos cointegrados:
Conjunto 1 Conjunto 2 Conjunto 3IMNENEf IMNENEf IMNENEfDISCEMf DISCEMf DISCEMf
DEMELEf DEMELEf DEMELEfεPER εIPI εPAR
La estimacion de las cuatro posibles normalizaciones de la ecuacion cointegrantedentro del conjunto 1, produce cuatro series de residuos cuyos estadısticos t0 son:
Vble. Dependiente t0IMNENEf −1,97DISCEMf −1,03DEMELEf −2,20εPER −1,99
Al nivel de significacion del 5 % en ninguno de los cuatro casos se puede rechazar laexistencia de una raız unitaria en los residuos, por tanto ninguna de ellas es una ecuacionde cointegracion.
La estimacion de las cuatro normalizaciones dentro del conjunto 2 presenta los si-guientes resultados:
Vble. Dependiente t0IMNENEf −3,02DISCEMf −1,00DEMELEf −3,36εIPI −2,49
En dos de las series de residuos (IMNENEf y DEMELEf ) se puede rechazar la exis-tencia de una raız unitaria al nivel de significacion del 5 % y en una tercera (εIPI ) el
98 CAPITULO 7. INDICADORES ECONOMICOS
valor del estadıstico t0, aunque superior, se encuentra muy cercano al valor crıtico de ladistribucion.
La estimacion de las cuatro normalizaciones dentro del conjunto 3 presenta los si-guientes resultados:
Vble. Dependiente t0IMNENEf −2,78DISCEMf −2,23DEMELEf −2,57εPAR −2,31
En ninguna de las cuatro ecuaciones se rechaza claramente la existencia de una raız uni-taria en los residuos; por tanto, ninguna de ellas se acepta como ecuacion cointegrante.
Solo se ha encontrado cointegracion dentro del conjunto 2. Se han encontrado comomınimo dos vectores cointegrantes y muy probablemente un tercero. Sin embargo, comola situacion de los valores crıticos cuando se trabaja con series de residuos no esta muybien definida, pasaremos a construir el contraste de la traza de Johansen para ver si sepueden ratificar los resultados antes mencionados. Al aplicarlo a las cuatro series queforman el conjunto 2 se han obtenido los siguientes resultados:
t(0) = 130,4 V.Crıtico = 47,21t(1) = 25,74 V.Crıtico = 29,68t(2) = 2,57 V.Crıtico = 15,41t(3) = 1,13 V.Crıtico = 3,76
Se rechaza la existencia de cero vectores cointegrantes (α = 5 %), pero se acepta la exis-tencia de al menos uno. Esto contradice los resultados que aparentemente se obtenıanmediante el estadıstico t0, pero dado que los valores crıticos de t0 no estan bien defi-nidos para series de residuos, se puede considerar mas fiable el resultado que indica elestadıstico de la traza. Esto implica la existencia de tres factores comunes a estas series.Sin embargo, la existencia de un componente comun de largo plazo determinado portres factores, cuando el numero de series considerado es de cuatro, no facilita muchola interpretacion de la informacion comun, al contrario de lo que ocurre en un modeloen el que solo haya uno o dos factores comunes. Aunque la capacidad explicativa delmodelo, en terminos cuantitativos puede ser alta, la explicacion desde un punto de vistadescriptivo del componente comun de largo plazo se complica bastante, por ello no seha considerado interesante la estimacion de los factores en este caso.
7.3.2.2.2. Indicadores adelantados
A continuacion se va a analizar el grupo de los indicadores adelantados. Las cin-co series del grupo junto con sus correlogramas, periodogramas y los de sus primerasdiferencias se recogen en las paginas 134 a 138.
En primer lugar, se comprueba el orden de integracion estacional uniforme y el ordende integracion en la frecuencia cero. Para ello se utilizan los estadısticos FD y t(γ0) yamencionados.

7.3. INDICADORES CICLICOS 99
Cuadro 7.4: Contraste de raız unitaria en la frecuencia cero y de integracion estacionaluniforme (Indicadores adelantados)
t(γ0) FDCOLOCA −1,14 2,62PROIND −1,85 3,16NIVCON −1,34 11,04STOCON −1,73 44,52M3d 1,62 3,79
El valor crıtico del estadıstico t(γ0) para T = 240 obs. al α = 5 % es de −2,80
(Beaulieu y Miron, 1993). El valor crıtico del estadıstico FD para α = 5 %
y T = 200 obs. es 3,23 y para T= 150 obs. es 3,12 (Cap.4).
El estadıstico FD muestra que, al nivel de significacion del 5 %, se puede admitir queCOLOCA es una serie integrada estacionalmente de orden uno, sin embargo las demasson SI(0). Tomando como base el estadıstico t(γ0) se aprecia que todas ellas contienenal menos una raız unitaria en la frecuencia cero. Aplicando el estadıstico a las seriesdiferenciadas se han obtenido los siguientes valores:
Serie t(γ0)
∆COLOCA −2,85∆PROIND −5,68∆NIVCON −6,23∆STOCON −5,07∆M3d −2,90
Como se puede apreciar, al nivel de significacion del 5 % se rechaza en todos los casosla existencia de una segunda raız unitaria, por tanto todas las series son I0(1).
Antes de analizar si existe o no cointegracion en este grupo, es necesario filtrarlas raıces unitarias estacionales que contenga cada una de las series. Para detectarlasutilizamos los estadısticos de HEGY. Los resultados se presentan en el Cuadro 7.5.
El filtro adecuado a la serie COLOCA es S(L), ya que esta serie es integrada esta-cional y uniformemente SI(1).
La serie PROIND presenta raıces unitarias en las frecuencias ±π/3, ±π/2, ±5π/6y π; por lo tanto, el filtro apropiado para esta serie es:
(1− L+ L2)(1 + L2)(1 +√
3L+ L2)(1 + L) =
=(1 +√
3L+ 2L2 + (1 +√
3)L3 + (1 +√
3)L4 + 2L5 +√
3L6 + L7)
Las series NIVCON y STOCON no presentan raıces unitarias estacionales, por loque no es necesario filtrarlas.
M3d contiene raıces unitarias en las frecuencias ±π/3, ±π/2 y ±2π/3. El filtroadecuado a estas frecuencias es:
(1− L+ L2)(1 + L2)(1 + L+ L2) =(1 + 2L+ 2L4 + L6
)
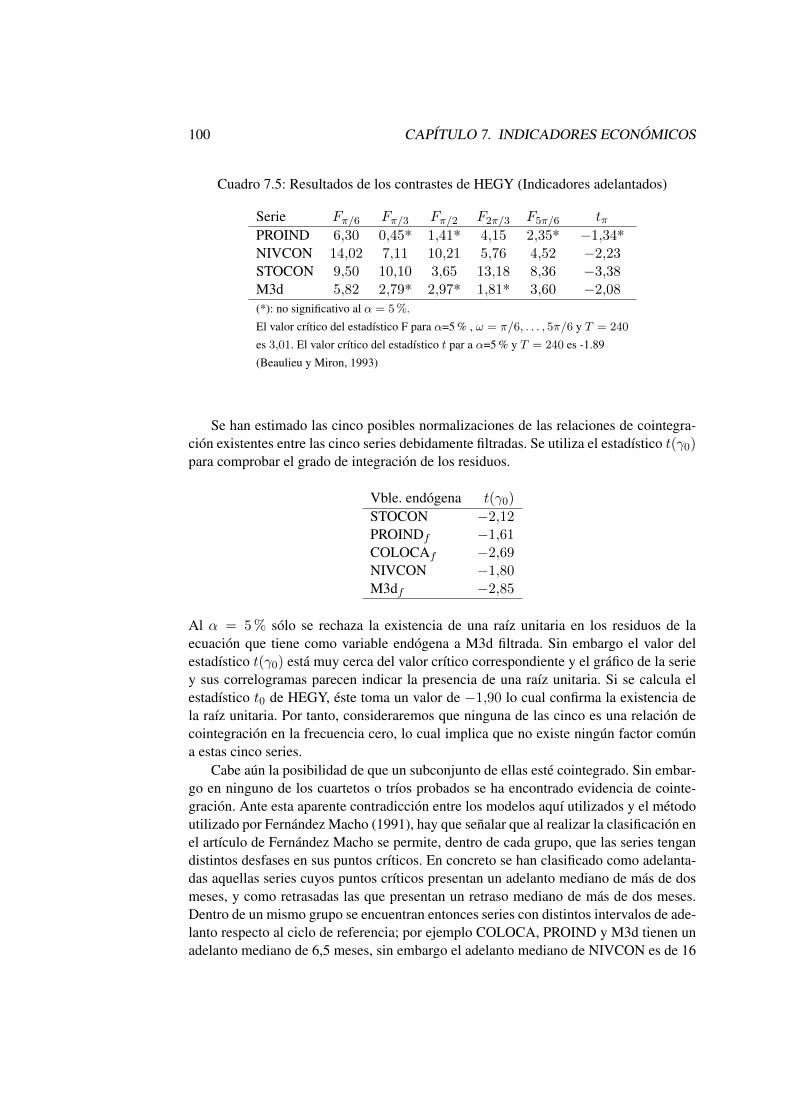
100 CAPITULO 7. INDICADORES ECONOMICOS
Cuadro 7.5: Resultados de los contrastes de HEGY (Indicadores adelantados)
Serie Fπ/6 Fπ/3 Fπ/2 F2π/3 F5π/6 tπPROIND 6,30 0,45* 1,41* 4,15 2,35* −1,34*NIVCON 14,02 7,11 10,21 5,76 4,52 −2,23STOCON 9,50 10,10 3,65 13,18 8,36 −3,38M3d 5,82 2,79* 2,97* 1,81* 3,60 −2,08
(*): no significativo al α = 5 %.
El valor crıtico del estadıstico F para α=5 % , ω = π/6, . . . , 5π/6 y T = 240
es 3,01. El valor crıtico del estadıstico t par a α=5 % y T = 240 es -1.89
(Beaulieu y Miron, 1993)
Se han estimado las cinco posibles normalizaciones de las relaciones de cointegra-cion existentes entre las cinco series debidamente filtradas. Se utiliza el estadıstico t(γ0)para comprobar el grado de integracion de los residuos.
Vble. endogena t(γ0)
STOCON −2,12PROINDf −1,61COLOCAf −2,69NIVCON −1,80M3df −2,85
Al α = 5 % solo se rechaza la existencia de una raız unitaria en los residuos de laecuacion que tiene como variable endogena a M3d filtrada. Sin embargo el valor delestadıstico t(γ0) esta muy cerca del valor crıtico correspondiente y el grafico de la seriey sus correlogramas parecen indicar la presencia de una raız unitaria. Si se calcula elestadıstico t0 de HEGY, este toma un valor de −1,90 lo cual confirma la existencia dela raız unitaria. Por tanto, consideraremos que ninguna de las cinco es una relacion decointegracion en la frecuencia cero, lo cual implica que no existe ningun factor comuna estas cinco series.
Cabe aun la posibilidad de que un subconjunto de ellas este cointegrado. Sin embar-go en ninguno de los cuartetos o trıos probados se ha encontrado evidencia de cointe-gracion. Ante esta aparente contradiccion entre los modelos aquı utilizados y el metodoutilizado por Fernandez Macho (1991), hay que senalar que al realizar la clasificacion enel artıculo de Fernandez Macho se permite, dentro de cada grupo, que las series tengandistintos desfases en sus puntos crıticos. En concreto se han clasificado como adelanta-das aquellas series cuyos puntos crıticos presentan un adelanto mediano de mas de dosmeses, y como retrasadas las que presentan un retraso mediano de mas de dos meses.Dentro de un mismo grupo se encuentran entonces series con distintos intervalos de ade-lanto respecto al ciclo de referencia; por ejemplo COLOCA, PROIND y M3d tienen unadelanto mediano de 6,5 meses, sin embargo el adelanto mediano de NIVCON es de 16

7.3. INDICADORES CICLICOS 101
meses, y el de STOCON(multiplicado por -1) solo de 3,5 meses. A esto hay que anadirel hecho de que cada una de las series no presenta un adelanto homogeneo respecto alciclo de referencia, sino que, en general presentan mayor adelanto en los valles que enlos picos. Sin embargo estos pequenos desfases no se tienen en cuenta en los modelosde factores comunes, en los que las variaciones en el componente de largo plazo han deser simultaneas para todas las series del modelo, y la relacion entre dicho componente ycada una de las series ha de permanecer constante a lo largo de todo el periodo muestral.La no homogeneidad de los desfases de cada serie, en todos los puntos, respecto al ciclode referencia es un problema conflictivo y de difıcil solucion.
7.3.2.2.3. Indicadores retrasados
Seguidamente se seguira el mismo procedimiento para analizar el grupo de los in-dicadores retrasados respecto al ciclo. En las paginas 137 y 139 a 142 se muestran losgraficos de estas series ası como sus correlogramas, periodogramas y los de sus primerasdiferencias.
La aplicacion de los estadısticos FD y t(γ0) a estas series, proporciona los siguientesresultados:
Serie t(γ0) FDIVEGAL −2,13 0,85STOCON −1,73 44,52IPC −2,69 7,94IMPORT −1,59 8,54EXPORT −3,07 3,27
Solamente en la serie IVEGAL se acepta la existencia de once raıces unitarias esta-cionales. Por tanto esta serie es SI(1), pero las demas son SI(0).
En lo que se refiere a la frecuencia cero, en todas las series se acepta la existencia deal menos una raız unitaria excepto en EXPORT. Sin embargo, si se analizan el grafico deesta serie y sus correlogramas es facil detectar la existencia de una tendencia; y el valorque ha tomado el estadıstico t(γ0) para esta serie, aunque inferior, esta muy cercanoal valor crıtico de la distribucion correspondiente, por tanto su importancia no debe serdeterminante en este caso y, teniendo en cuenta el grafico y los correlogramas, se puedeaceptar que contenga tambien una raız unitaria.
A continuacion se calcula el estadıstico t(γ0) sobre las series diferenciadas paraintentar detectar la existencia de una segunda raız unitaria en la frecuencia cero:
Serie t(γ0)
∆IVEGAL −5,07∆STOCON −4,69∆IPC −2,89∆IMPORT −5,88∆EXPORT −6,69

102 CAPITULO 7. INDICADORES ECONOMICOS
Para las cinco series se rechaza a un nivel de significacion α = 5 % la existencia deuna segunda raız unitaria, aunque el valor que ha tomado el estadıstico para la variableIPC esta muy cercano al valor crıtico (−2,80) y en su grafico y los de sus correlogramasparece apreciarse que la serie aun no es estacionaria.
Como no puede existir cointegracion estacional, ya que solo una variable (IVEGAL)esta integrada estacional y uniformemente, pasamos a estudiar la cointegracion en lafrecuencia cero.
Antes de estimar las posibles relaciones cointegrantes, igual que se hizo para los dosgrupos de indicadores anteriores, es necesario extraer las raıces unitarias estacionales decada serie. Para detectarlas, de nuevo, se utilizan los estadısticos de HEGY, que puedenverse en el Cuadro 7.6.
Cuadro 7.6: Resultados de los contrastes de HEGY (Indicadores retrasados)
Serie Fπ/6 Fπ/3 Fπ/2 F2π/3 F5π/6 tπSTOCON 9,50 10,10 3,65 13,18 8,36 −3,38IPC 9,87 4,12 7,71 2,46* 9,41 −2,05IMPORT 11,98 2,45* 5,61 6,63 6,43 −2,86EXPORT 4,91 1,33* 2,66* 3,13 0,97* −1,72*(*): no significativo al α = 5 %.
El valor crıtico del estadıstico F para α=5 % , ω = π/6, . . . , 5π/6 y T = 240
es 3,01. El valor crıtico del estadıstico t par a α=5 % y T = 240 es -1.89
(Beaulieu y Miron, 1993)
Del Cuadro, se deduce que la serie STOCON no contiene ninguna raız unitaria es-tacional, por tanto no es necesario filtrarla. La serie IPC tiene raıces unitarias en lasfrecuencias ±2π/3; esto implica que ha de transformarse con el filtro: (1 + L+ L2).
La serie IMPORT contiene raıces unitarias en las frecuencias±π/3 y, por tanto, conella ha de utilizarse el filtro: (1− L+ L2).
EXPORT presenta raıces unitarias en ±π/3, ±π/2, ±5π/6 y π. El filtro correspon-diente a estas frecuencias es:
(1− L+ L2)(1 + L2)(1 +√
3L+ L2)(1 + L) =
= 1 +√
3L+ 2L2 + (1 +√
3)L3 + (1 +√
3)L4 + 2L5 +√
3L6 + L7
La serie IVEGAL presenta once raıces unitarias estacionales, lo cual implica que hade filtrarse mediante el polinomio S(L).
Una vez filtrada la serie IPC se comprueba como efectivamente presenta una segundaraız unitaria en la frecuencia cero, pues el estadıstico t(γ0) aplicado a la serie ∆IPCftoma el valor −1,97, por lo tanto se considerara que es I0(2).
Seguidamente se estiman por MCO las cuatro posibles especificaciones de la rela-cion entre IVEGALf , STOCON, IMPORTf y EXPORTf y se comprueba el orden deintegracion de los residuos.
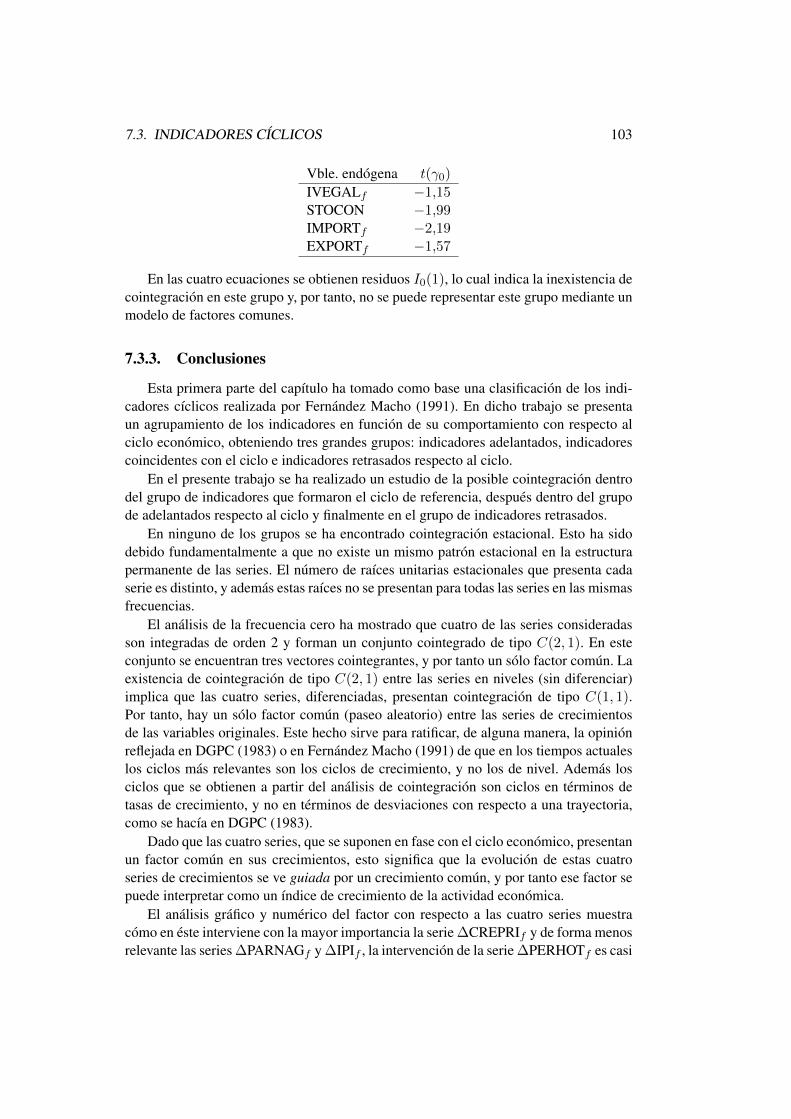
7.3. INDICADORES CICLICOS 103
Vble. endogena t(γ0)
IVEGALf −1,15STOCON −1,99IMPORTf −2,19EXPORTf −1,57
En las cuatro ecuaciones se obtienen residuos I0(1), lo cual indica la inexistencia decointegracion en este grupo y, por tanto, no se puede representar este grupo mediante unmodelo de factores comunes.
7.3.3. Conclusiones
Esta primera parte del capıtulo ha tomado como base una clasificacion de los indi-cadores cıclicos realizada por Fernandez Macho (1991). En dicho trabajo se presentaun agrupamiento de los indicadores en funcion de su comportamiento con respecto alciclo economico, obteniendo tres grandes grupos: indicadores adelantados, indicadorescoincidentes con el ciclo e indicadores retrasados respecto al ciclo.
En el presente trabajo se ha realizado un estudio de la posible cointegracion dentrodel grupo de indicadores que formaron el ciclo de referencia, despues dentro del grupode adelantados respecto al ciclo y finalmente en el grupo de indicadores retrasados.
En ninguno de los grupos se ha encontrado cointegracion estacional. Esto ha sidodebido fundamentalmente a que no existe un mismo patron estacional en la estructurapermanente de las series. El numero de raıces unitarias estacionales que presenta cadaserie es distinto, y ademas estas raıces no se presentan para todas las series en las mismasfrecuencias.
El analisis de la frecuencia cero ha mostrado que cuatro de las series consideradasson integradas de orden 2 y forman un conjunto cointegrado de tipo C(2, 1). En esteconjunto se encuentran tres vectores cointegrantes, y por tanto un solo factor comun. Laexistencia de cointegracion de tipo C(2, 1) entre las series en niveles (sin diferenciar)implica que las cuatro series, diferenciadas, presentan cointegracion de tipo C(1, 1).Por tanto, hay un solo factor comun (paseo aleatorio) entre las series de crecimientosde las variables originales. Este hecho sirve para ratificar, de alguna manera, la opinionreflejada en DGPC (1983) o en Fernandez Macho (1991) de que en los tiempos actualeslos ciclos mas relevantes son los ciclos de crecimiento, y no los de nivel. Ademas losciclos que se obtienen a partir del analisis de cointegracion son ciclos en terminos detasas de crecimiento, y no en terminos de desviaciones con respecto a una trayectoria,como se hacıa en DGPC (1983).
Dado que las cuatro series, que se suponen en fase con el ciclo economico, presentanun factor comun en sus crecimientos, esto significa que la evolucion de estas cuatroseries de crecimientos se ve guiada por un crecimiento comun, y por tanto ese factor sepuede interpretar como un ındice de crecimiento de la actividad economica.
El analisis grafico y numerico del factor con respecto a las cuatro series muestracomo en este interviene con la mayor importancia la serie ∆CREPRIf y de forma menosrelevante las series ∆PARNAGf y ∆IPIf , la intervencion de la serie ∆PERHOTf es casi
104 CAPITULO 7. INDICADORES ECONOMICOS
anecdotica. En la serie ∆PERHOTf se aceptaba muy marginalmente una raız unitaria,esto implica que la tendencia de esta serie era muy leve y por ello su participacion en elfactor comun y los valores que le corresponden en la matriz de ponderaciones han sidomuy pequenos.
Las demas series que componıan el ciclo de referencia no estan cointegradas entresı y al anadir al conjunto los residuos de las ecuaciones cointegrantes entre las series∆PERHOTf , ∆IPIf , ∆CREPRIf y ∆PARNAGf solo en un caso se obtiene cointe-gracion, y con solo un vector cointegrante, de manera que podrıa haber tres factorescomunes a cuatro series; este hecho, sin embargo, no ayuda mucho en la explicacion,desde un punto de vista economico, de la evolucion a largo plazo de las series.
El hecho de no encontrar cointegracion en la frecuencia cero en el grupo de indica-dores adelantados implica que las series consideradas no siguen una tendencia comuna largo plazo, y por tanto, no tendrıa sentido elaborar un indicador sintetico adelantadoen funcion de estas series, ya que en ellas no se ha encontrado implıcitamente un ciclocomun adelantado respecto al ciclo economico general. Hay que senalar, sin embargoque al realizar la clasificacion de los indicadores, se ha permitido que series del mismogrupo presenten diferentes desfases respecto al ciclo de referencia. Es posible que lacorreccion de estos desfases mejore el ajuste a largo plazo de las series, posibilitando laexistencia de cointegracion y factores comunes. Exactamente lo mismo ha ocurrido conlos indicadores retrasados.
7.4. Indicadores de produccion
El objetivo fundamental de la presente aplicacion es obtener el (los) componente(s)permanente(s) comun(es) de un amplio conjunto de variables relacionadas con la pro-duccion. La intencion primordial del trabajo es integrar series que son componentes delIPI con otras series de sectores industriales no contenidos en el IPI y con series del sec-tor de servicios7. Para ello se van a utilizar variables que son aproximaciones a las cifrasde produccion de los distintos sectores de la actividad economica.
En concreto, se han elegido diez series de datos temporales relativos a la produccionde bienes y servicios en varios sectores de la economıa. Las series relativas a la produc-cion, al igual que ocurre con las de consumo, suelen presentar componentes estacionalesmuy acentuados.
Las series que aquı se han considerado son las siguientes:
7Se excluye explıcitamente el sector primario debido a que su comportamiento especıfico es ajeno, engran medida a las fluctuaciones cıclicas de la economıa en general.
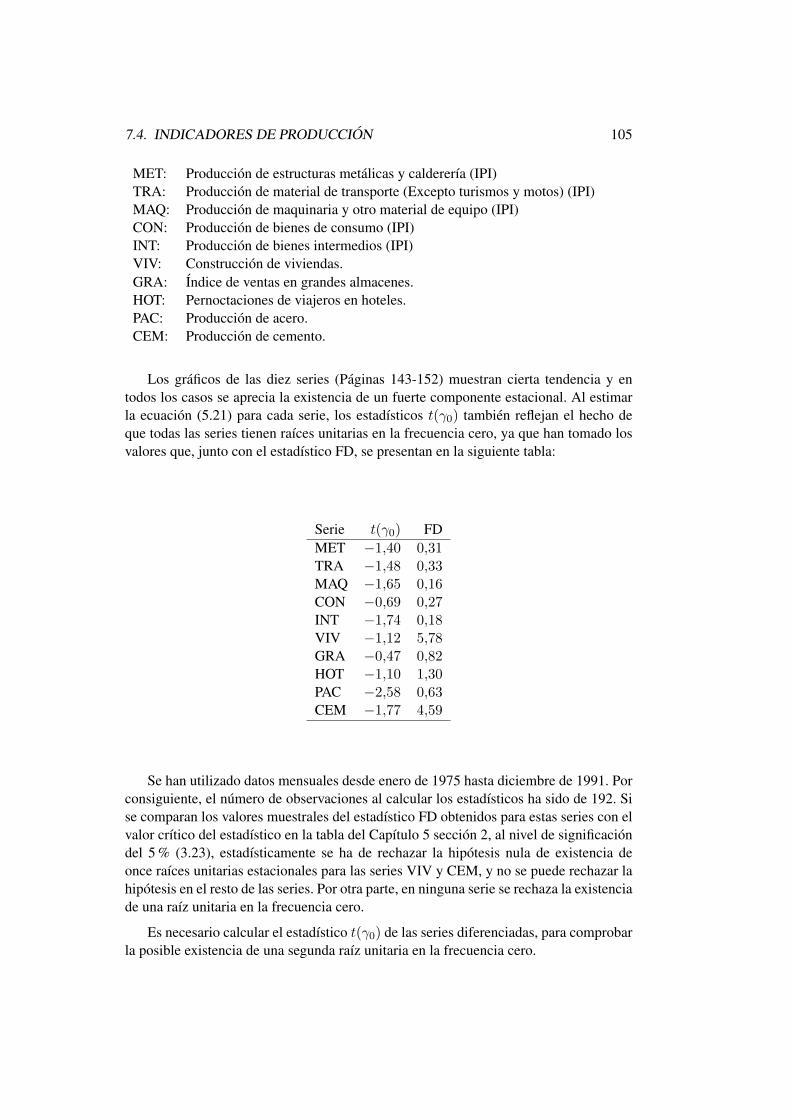
7.4. INDICADORES DE PRODUCCION 105
MET: Produccion de estructuras metalicas y caldererıa (IPI)TRA: Produccion de material de transporte (Excepto turismos y motos) (IPI)MAQ: Produccion de maquinaria y otro material de equipo (IPI)CON: Produccion de bienes de consumo (IPI)INT: Produccion de bienes intermedios (IPI)VIV: Construccion de viviendas.GRA: Indice de ventas en grandes almacenes.HOT: Pernoctaciones de viajeros en hoteles.PAC: Produccion de acero.CEM: Produccion de cemento.
Los graficos de las diez series (Paginas 143-152) muestran cierta tendencia y entodos los casos se aprecia la existencia de un fuerte componente estacional. Al estimarla ecuacion (5.21) para cada serie, los estadısticos t(γ0) tambien reflejan el hecho deque todas las series tienen raıces unitarias en la frecuencia cero, ya que han tomado losvalores que, junto con el estadıstico FD, se presentan en la siguiente tabla:
Serie t(γ0) FDMET −1,40 0,31TRA −1,48 0,33MAQ −1,65 0,16CON −0,69 0,27INT −1,74 0,18VIV −1,12 5,78GRA −0,47 0,82HOT −1,10 1,30PAC −2,58 0,63CEM −1,77 4,59
Se han utilizado datos mensuales desde enero de 1975 hasta diciembre de 1991. Porconsiguiente, el numero de observaciones al calcular los estadısticos ha sido de 192. Sise comparan los valores muestrales del estadıstico FD obtenidos para estas series con elvalor crıtico del estadıstico en la tabla del Capıtulo 5 seccion 2, al nivel de significaciondel 5 % (3.23), estadısticamente se ha de rechazar la hipotesis nula de existencia deonce raıces unitarias estacionales para las series VIV y CEM, y no se puede rechazar lahipotesis en el resto de las series. Por otra parte, en ninguna serie se rechaza la existenciade una raız unitaria en la frecuencia cero.
Es necesario calcular el estadıstico t(γ0) de las series diferenciadas, para comprobarla posible existencia de una segunda raız unitaria en la frecuencia cero.
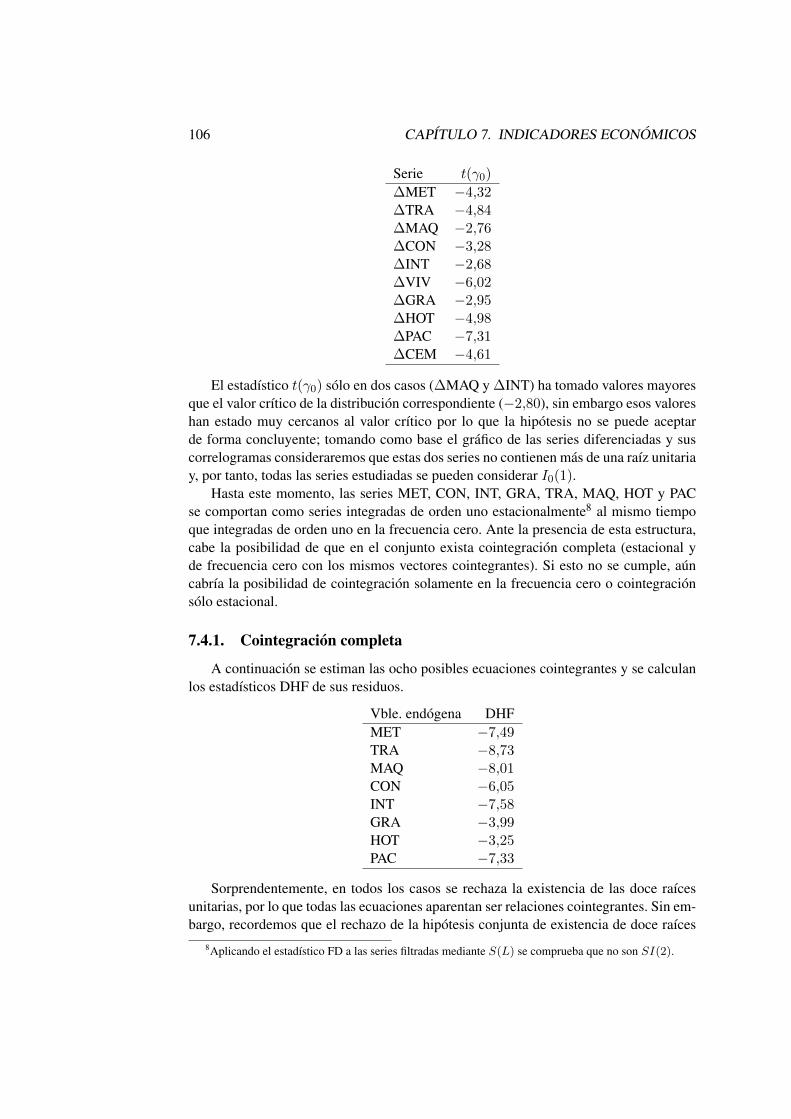
106 CAPITULO 7. INDICADORES ECONOMICOS
Serie t(γ0)
∆MET −4,32∆TRA −4,84∆MAQ −2,76∆CON −3,28∆INT −2,68∆VIV −6,02∆GRA −2,95∆HOT −4,98∆PAC −7,31∆CEM −4,61
El estadıstico t(γ0) solo en dos casos (∆MAQ y ∆INT) ha tomado valores mayoresque el valor crıtico de la distribucion correspondiente (−2,80), sin embargo esos valoreshan estado muy cercanos al valor crıtico por lo que la hipotesis no se puede aceptarde forma concluyente; tomando como base el grafico de las series diferenciadas y suscorrelogramas consideraremos que estas dos series no contienen mas de una raız unitariay, por tanto, todas las series estudiadas se pueden considerar I0(1).
Hasta este momento, las series MET, CON, INT, GRA, TRA, MAQ, HOT y PACse comportan como series integradas de orden uno estacionalmente8 al mismo tiempoque integradas de orden uno en la frecuencia cero. Ante la presencia de esta estructura,cabe la posibilidad de que en el conjunto exista cointegracion completa (estacional yde frecuencia cero con los mismos vectores cointegrantes). Si esto no se cumple, auncabrıa la posibilidad de cointegracion solamente en la frecuencia cero o cointegracionsolo estacional.
7.4.1. Cointegracion completa
A continuacion se estiman las ocho posibles ecuaciones cointegrantes y se calculanlos estadısticos DHF de sus residuos.
Vble. endogena DHFMET −7,49TRA −8,73MAQ −8,01CON −6,05INT −7,58GRA −3,99HOT −3,25PAC −7,33
Sorprendentemente, en todos los casos se rechaza la existencia de las doce raıcesunitarias, por lo que todas las ecuaciones aparentan ser relaciones cointegrantes. Sin em-bargo, recordemos que el rechazo de la hipotesis conjunta de existencia de doce raıces
8Aplicando el estadıstico FD a las series filtradas mediante S(L) se comprueba que no son SI(2).
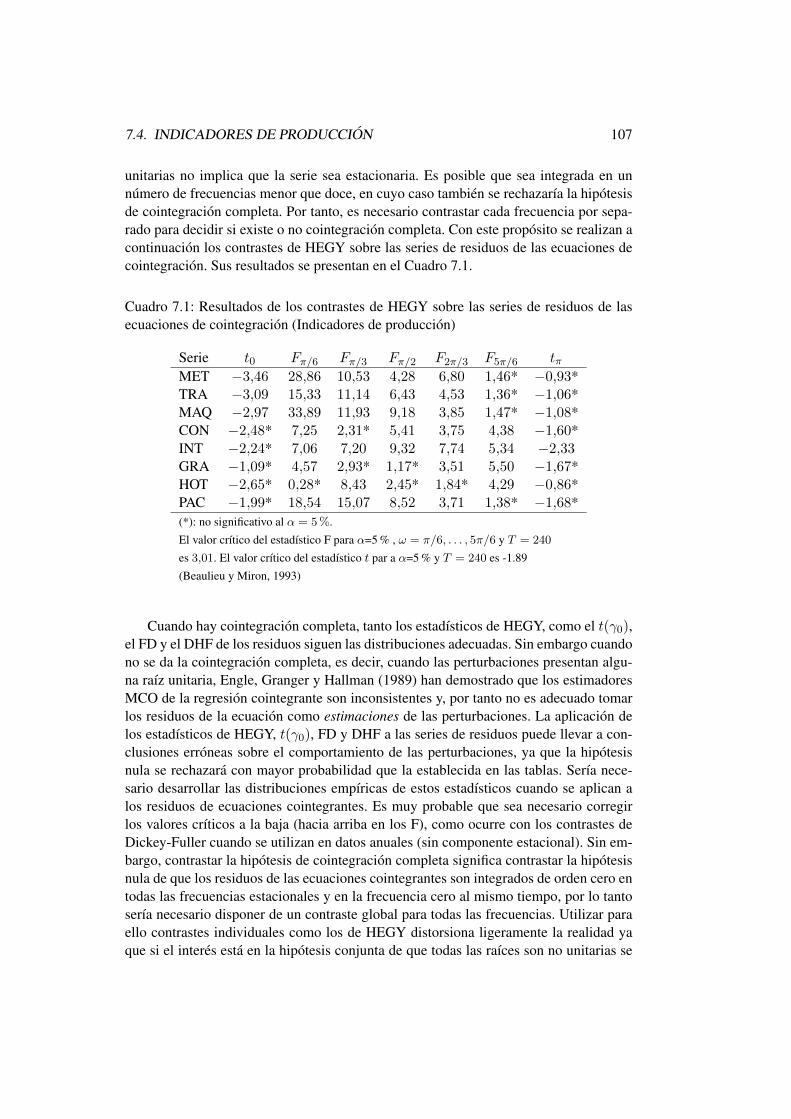
7.4. INDICADORES DE PRODUCCION 107
unitarias no implica que la serie sea estacionaria. Es posible que sea integrada en unnumero de frecuencias menor que doce, en cuyo caso tambien se rechazarıa la hipotesisde cointegracion completa. Por tanto, es necesario contrastar cada frecuencia por sepa-rado para decidir si existe o no cointegracion completa. Con este proposito se realizan acontinuacion los contrastes de HEGY sobre las series de residuos de las ecuaciones decointegracion. Sus resultados se presentan en el Cuadro 7.1.
Cuadro 7.1: Resultados de los contrastes de HEGY sobre las series de residuos de lasecuaciones de cointegracion (Indicadores de produccion)
Serie t0 Fπ/6 Fπ/3 Fπ/2 F2π/3 F5π/6 tπMET −3,46 28,86 10,53 4,28 6,80 1,46* −0,93*TRA −3,09 15,33 11,14 6,43 4,53 1,36* −1,06*MAQ −2,97 33,89 11,93 9,18 3,85 1,47* −1,08*CON −2,48* 7,25 2,31* 5,41 3,75 4,38 −1,60*INT −2,24* 7,06 7,20 9,32 7,74 5,34 −2,33GRA −1,09* 4,57 2,93* 1,17* 3,51 5,50 −1,67*HOT −2,65* 0,28* 8,43 2,45* 1,84* 4,29 −0,86*PAC −1,99* 18,54 15,07 8,52 3,71 1,38* −1,68*(*): no significativo al α = 5 %.
El valor crıtico del estadıstico F para α=5 % , ω = π/6, . . . , 5π/6 y T = 240
es 3,01. El valor crıtico del estadıstico t par a α=5 % y T = 240 es -1.89
(Beaulieu y Miron, 1993)
Cuando hay cointegracion completa, tanto los estadısticos de HEGY, como el t(γ0),el FD y el DHF de los residuos siguen las distribuciones adecuadas. Sin embargo cuandono se da la cointegracion completa, es decir, cuando las perturbaciones presentan algu-na raız unitaria, Engle, Granger y Hallman (1989) han demostrado que los estimadoresMCO de la regresion cointegrante son inconsistentes y, por tanto no es adecuado tomarlos residuos de la ecuacion como estimaciones de las perturbaciones. La aplicacion delos estadısticos de HEGY, t(γ0), FD y DHF a las series de residuos puede llevar a con-clusiones erroneas sobre el comportamiento de las perturbaciones, ya que la hipotesisnula se rechazara con mayor probabilidad que la establecida en las tablas. Serıa nece-sario desarrollar las distribuciones empıricas de estos estadısticos cuando se aplican alos residuos de ecuaciones cointegrantes. Es muy probable que sea necesario corregirlos valores crıticos a la baja (hacia arriba en los F), como ocurre con los contrastes deDickey-Fuller cuando se utilizan en datos anuales (sin componente estacional). Sin em-bargo, contrastar la hipotesis de cointegracion completa significa contrastar la hipotesisnula de que los residuos de las ecuaciones cointegrantes son integrados de orden cero entodas las frecuencias estacionales y en la frecuencia cero al mismo tiempo, por lo tantoserıa necesario disponer de un contraste global para todas las frecuencias. Utilizar paraello contrastes individuales como los de HEGY distorsiona ligeramente la realidad yaque si el interes esta en la hipotesis conjunta de que todas las raıces son no unitarias se

108 CAPITULO 7. INDICADORES ECONOMICOS
deberıan corregir los valores crıticos hacia arriba (hacia abajo en los F). Por consiguien-te se puede considerar que hay dos fuerzas que actuan en sentido contrario sobre losvalores crıticos de las distribuciones F y t en los contrastes de HEGY y no se dispone deevidencia sobre cual ha de ganar. Esto implica que los estadısticos de HEGY solo pue-den utilizarse a nivel indicativo, y en ningun caso tomarse como pruebas concluyentesen uno u otro sentido.
En el conjunto de variables estudiado, hay dos variables en las que el estadısticoDHF toma valores notablemente inferiores a las restantes, los residuos de GRA y HOT,por lo que se puede considerar probable la existencia de doce raıces unitarias en esasvariables. Al utilizar los estadısticos de HEGY se aprecia que en estas series de residuosse pueden llegar a aceptar 7 y 8 raıces unitarias respectivamente, sin embargo en lasrestantes series de residuos como maximo se aceptan cuatro y en gran parte de los casoslos estadısticos estan muy proximos a los valores crıticos. Teniendo esto en cuenta nose estara muy lejos de la realidad si, de los ocho vectores posibles, se supone que seisde ellos son vectores cointegrantes. Serıa deseable disponer de un metodo similar al deJohansen para determinar el numero de vectores cointegrantes, pero en este sentido solose dispone de un metodo para trabajar con datos trimestrales (Lee, 1992) y aunque elmetodo puede ser similar para datos mensuales, no existen tablas corregidas para hacerlos contrastes.
Si se admiten seis vectores de cointegracion completa, en este conjunto de ocho va-riables existiran dos factores completos comunes, es decir dos factores con raıces unita-rias en la tendencia y en las frecuencias estacionales, que responden a la ecuacion (7.13).
Se ha utilizado el metodo basado en el mecanismo de correccion de error, descritoen el Capıtulo 6 seccion 3.3, para estimar estos dos factores9. En este caso el ECM siguela expresion:
∆12xt = −π1 [Z1(L) +Q∗2Z2(L) + · · ·+Q∗12Z12(L)]xt +
+
p∑i=1
Ai∆12xt−i + εt (7.20)
9Incluyendo en el modelo de correccion de error el termino correspondiente a la frecuencia cero, ademasde los correspondientes a las frecuencias estacionales.

7.4. INDICADORES DE PRODUCCION 109
dondeQ∗2, . . . , Q∗12 son matrices de coeficientes similares a las de la expresion (6.28)
y los polinomios Zj con j : 1, . . . , 12 son10:
Z1 = (1 + L+ L2 + · · ·+ L11)
Z2 = −(1− L+ L2 − L3 + L4 − L5 + L6 − L7 + L8 − L9 + L10 − L11)
Z3 = −(L− L3 + L5 − L7 + L9 − L11)
Z4 = −(1− L2 + L4 − L6 + L8 − L10)
Z5 = −1
2(1 + L− 2L2 + L3 + L4 − 2L5 + L6 + L7 − 2L8 + L9 + L10 − 2L11)
Z6 =
√3
2(1− L+ L3 − L4 + L6 − L7 + L9 − L10)
Z7 =1
2(1− L− L2 − L3 + L4 + L5 + L6 − L7 − L8 − L9 + L10 + L11)
Z8 = −√
3
2(1 + L− L3 − L4 + L6 + L7 − L9 − L10)
Z9 = −1
2(√
3− L+ L3 −√
3L4 + 2L5 −√
3L6 + L7 − L9 +√
3L10 − 2L11)
Z10 =1
2(1−
√3L+ 2L2 −
√3L3 + L4 − L6 +
√3L7 − 2L8 +
√3L9 − L10)
Z11 =1
2(√
3 + L− L3 −√
3L4 − 2L5 −√
3L6 − L7 + L9 +√
3L10 + 2L11
Z12 = −1
2(1 +
√3L+ 2L2 +
√3L3 + L4 − L6 −
√3L7 − 2L8 −
√3L9 − L10)
La estimacion de los factores proporciona los siguientes resultados:
factor 1 = 3,49MET + 2,69TRA− 4,89MAQ+ 14,13CON − 18,37 INT +
+19,92GRA− 2,81HOT − 10,66PAC
factor 2 = −13,97MET + 0,57TRA+ 1,19MAQ− 7,34CON + 33,66 INT +
+12,27GRA+ 0,72HOT + 12,63PAC
En la ecuacion (7.20) se ha utilizado p = 2, ya que si se utiliza el estadıstico Q deLjung-Box para determinar el orden del retardo autorregresivo, en este caso se pierdentantos grados de libertad que es imposible realizar la estimacion. Con p = 2 aun quedan84 grados de libertad en la estimacion. Se ha utilizado este valor de p aun sabiendo quelos estimadores de la ecuacion (7.20) pueden ser inconsistentes debido a la existencia deautocorrelacion en las perturbaciones. Sin embargo, la estimacion posterior del modelode factores comunes utilizando los factores aquı estimados no presenta autocorrelacionresidual.
Para obtener factores ortogonales a los componentes estacionarios proyectan estosdos factores sobre las variables z1t, . . . , z6t y se restan estas proyecciones de los factoresanteriores.
10Se puede ver su obtencion en la seccion 4.4.4
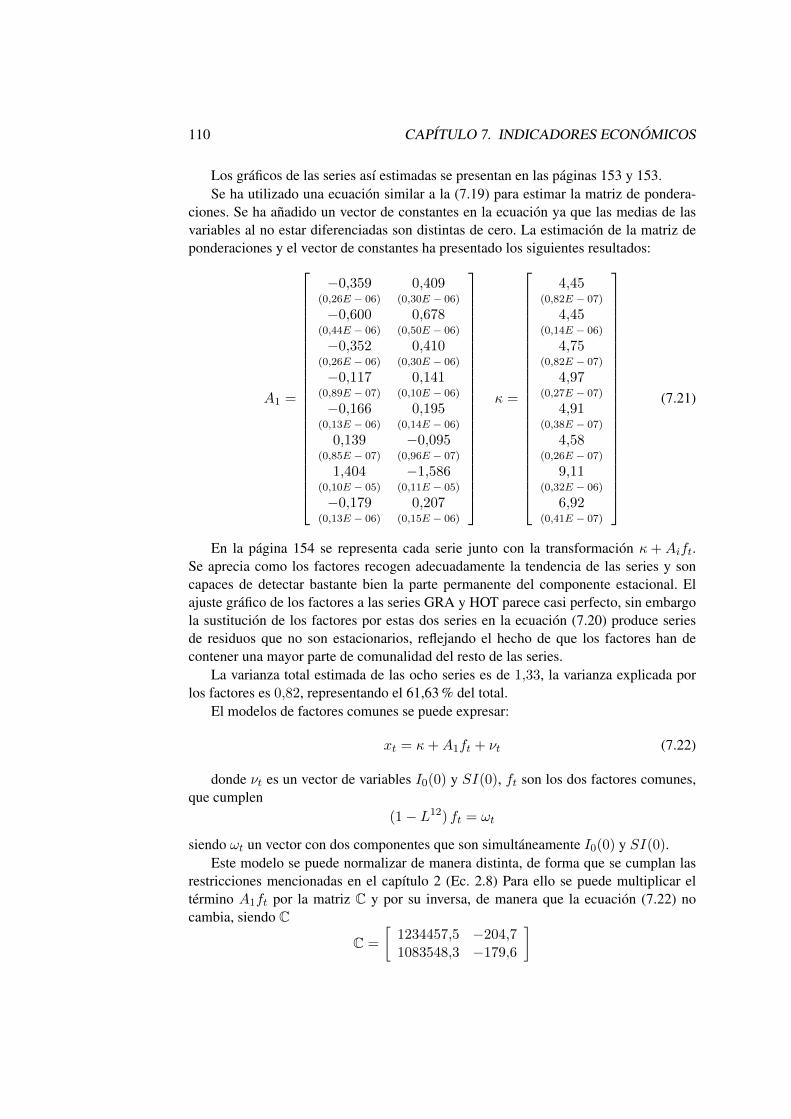
110 CAPITULO 7. INDICADORES ECONOMICOS
Los graficos de las series ası estimadas se presentan en las paginas 153 y 153.Se ha utilizado una ecuacion similar a la (7.19) para estimar la matriz de pondera-
ciones. Se ha anadido un vector de constantes en la ecuacion ya que las medias de lasvariables al no estar diferenciadas son distintas de cero. La estimacion de la matriz deponderaciones y el vector de constantes ha presentado los siguientes resultados:
A1 =
−0,359(0,26E − 06)
0,409(0,30E − 06)
−0,600(0,44E − 06)
0,678(0,50E − 06)
−0,352(0,26E − 06)
0,410(0,30E − 06)
−0,117(0,89E − 07)
0,141(0,10E − 06)
−0,166(0,13E − 06)
0,195(0,14E − 06)
0,139(0,85E − 07)
−0,095(0,96E − 07)
1,404(0,10E − 05)
−1,586(0,11E − 05)
−0,179(0,13E − 06)
0,207(0,15E − 06)
κ =
4,45(0,82E − 07)
4,45(0,14E − 06)
4,75(0,82E − 07)
4,97(0,27E − 07)
4,91(0,38E − 07)
4,58(0,26E − 07)
9,11(0,32E − 06)
6,92(0,41E − 07)
(7.21)
En la pagina 154 se representa cada serie junto con la transformacion κ+Aift.Se aprecia como los factores recogen adecuadamente la tendencia de las series y soncapaces de detectar bastante bien la parte permanente del componente estacional. Elajuste grafico de los factores a las series GRA y HOT parece casi perfecto, sin embargola sustitucion de los factores por estas dos series en la ecuacion (7.20) produce seriesde residuos que no son estacionarios, reflejando el hecho de que los factores han decontener una mayor parte de comunalidad del resto de las series.
La varianza total estimada de las ocho series es de 1,33, la varianza explicada porlos factores es 0,82, representando el 61,63 % del total.
El modelos de factores comunes se puede expresar:
xt = κ+A1ft + νt (7.22)
donde νt es un vector de variables I0(0) y SI(0), ft son los dos factores comunes,que cumplen
(1− L12) ft = ωt
siendo ωt un vector con dos componentes que son simultaneamente I0(0) y SI(0).Este modelo se puede normalizar de manera distinta, de forma que se cumplan las
restricciones mencionadas en el capıtulo 2 (Ec. 2.8) Para ello se puede multiplicar eltermino A1ft por la matriz C y por su inversa, de manera que la ecuacion (7.22) nocambia, siendo C
C =
[1234457,5 −204,71083548,3 −179,6
]

7.4. INDICADORES DE PRODUCCION 111
La ecuacion (7.22) queda entonces:
xt = κ+ (A1C)(C−1ft) + νt = κ+A∗1f∗t + νt
siendo
f∗t = C−1ft y A∗1 =
1,0 0,0−6031,6 1,0−281728,7 −1,61
8348,7 −1,386371,9 −1,05
68652,5 −11,3814670,7 −2,423326,6 −0,55
.
En tal caso, el primer factor representa el componente permanente de la primera variabley el segundo factor es la parte de la estructura permanente de la segunda variable que nose ha podido explicar mediante el primer factor.
Analisis univariante de los factores
Disponer de una estimacion de los factores permite realizar un analisis univariante delos mismos como si de cualquier serie real se tratara11. Para obtener una descomposicionunivariante de los factores se ha planteado un modelo estructural como el siguiente:
yt = µt + st + εt
con µt = β + µt−1 + ηt
y S(L) st = ωt
en el que µt es el componente de tendencia, que se ha supuesto un paseo aleatorioalrededor de una pendiente fija β (ya que las series son I0(1)); st es el componenteestacional y εt, ηt y ωt son perturbaciones aleatorias independientes con media cero yvarianzas constantes σ2ε , σ2η y σ2ω. Estas varianzas se estiman maximizando la funcion deverosimilitud espectral (ver Harvey y Peters, 1990). Para el primer factor comun se hanobtenido las siguientes estimaciones12:
σ2ε = 0,8131, con desv.tıpica: 0,1634σ2η = 0,2068, con desv.tıpica: 0,0661
σ2ω = 0,1485, con desv.tıpica: 0,1634
Se utiliza un algoritmo de suavizamiento para obtener una estimacion de los com-ponentes. Dichas estimaciones se representan en la pagina 155. En el grafico superior
11El analisis se ha hechos sobre la primera normalizacion de los factores ft, tal y como se obtuvierondesde el procedimiento de estimacion y posteriormente ortogonalizados respecto al componente estaciona-rio.
12Se ha utilizado el programa STAMP
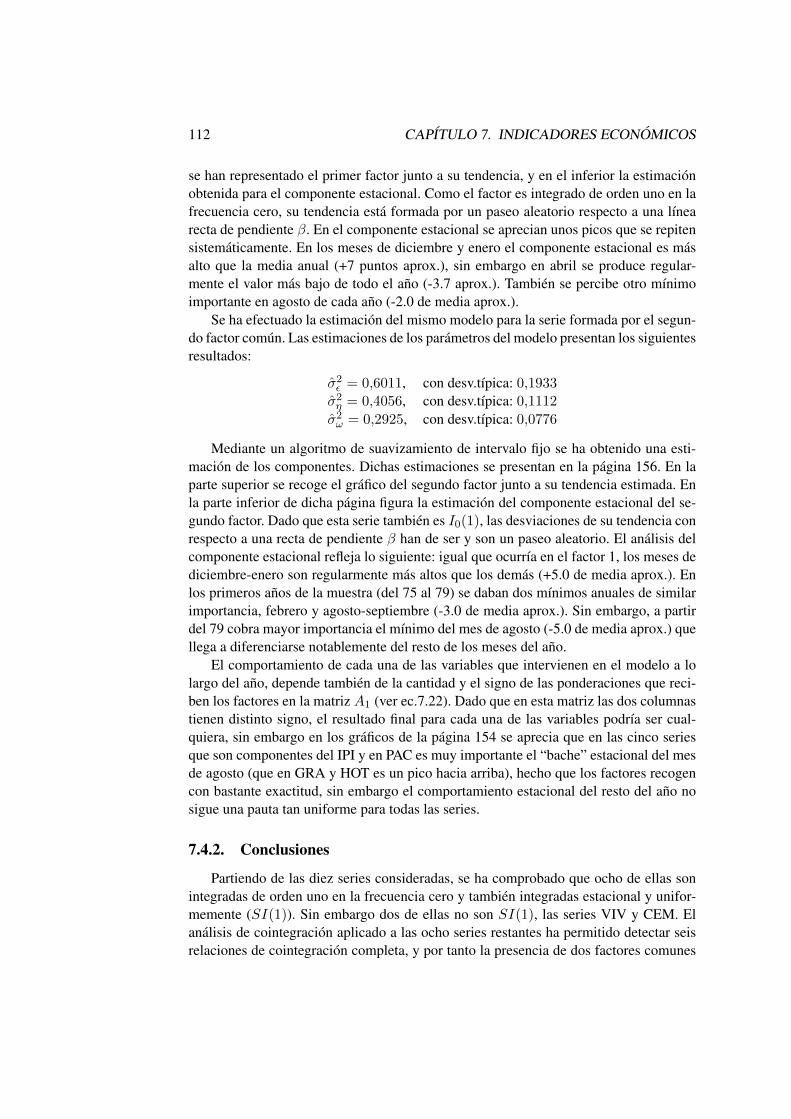
112 CAPITULO 7. INDICADORES ECONOMICOS
se han representado el primer factor junto a su tendencia, y en el inferior la estimacionobtenida para el componente estacional. Como el factor es integrado de orden uno en lafrecuencia cero, su tendencia esta formada por un paseo aleatorio respecto a una lınearecta de pendiente β. En el componente estacional se aprecian unos picos que se repitensistematicamente. En los meses de diciembre y enero el componente estacional es masalto que la media anual (+7 puntos aprox.), sin embargo en abril se produce regular-mente el valor mas bajo de todo el ano (-3.7 aprox.). Tambien se percibe otro mınimoimportante en agosto de cada ano (-2.0 de media aprox.).
Se ha efectuado la estimacion del mismo modelo para la serie formada por el segun-do factor comun. Las estimaciones de los parametros del modelo presentan los siguientesresultados:
σ2ε = 0,6011, con desv.tıpica: 0,1933σ2η = 0,4056, con desv.tıpica: 0,1112
σ2ω = 0,2925, con desv.tıpica: 0,0776
Mediante un algoritmo de suavizamiento de intervalo fijo se ha obtenido una esti-macion de los componentes. Dichas estimaciones se presentan en la pagina 156. En laparte superior se recoge el grafico del segundo factor junto a su tendencia estimada. Enla parte inferior de dicha pagina figura la estimacion del componente estacional del se-gundo factor. Dado que esta serie tambien es I0(1), las desviaciones de su tendencia conrespecto a una recta de pendiente β han de ser y son un paseo aleatorio. El analisis delcomponente estacional refleja lo siguiente: igual que ocurrıa en el factor 1, los meses dediciembre-enero son regularmente mas altos que los demas (+5.0 de media aprox.). Enlos primeros anos de la muestra (del 75 al 79) se daban dos mınimos anuales de similarimportancia, febrero y agosto-septiembre (-3.0 de media aprox.). Sin embargo, a partirdel 79 cobra mayor importancia el mınimo del mes de agosto (-5.0 de media aprox.) quellega a diferenciarse notablemente del resto de los meses del ano.
El comportamiento de cada una de las variables que intervienen en el modelo a lolargo del ano, depende tambien de la cantidad y el signo de las ponderaciones que reci-ben los factores en la matriz A1 (ver ec.7.22). Dado que en esta matriz las dos columnastienen distinto signo, el resultado final para cada una de las variables podrıa ser cual-quiera, sin embargo en los graficos de la pagina 154 se aprecia que en las cinco seriesque son componentes del IPI y en PAC es muy importante el “bache” estacional del mesde agosto (que en GRA y HOT es un pico hacia arriba), hecho que los factores recogencon bastante exactitud, sin embargo el comportamiento estacional del resto del ano nosigue una pauta tan uniforme para todas las series.
7.4.2. Conclusiones
Partiendo de las diez series consideradas, se ha comprobado que ocho de ellas sonintegradas de orden uno en la frecuencia cero y tambien integradas estacional y unifor-memente (SI(1)). Sin embargo dos de ellas no son SI(1), las series VIV y CEM. Elanalisis de cointegracion aplicado a las ocho series restantes ha permitido detectar seisrelaciones de cointegracion completa, y por tanto la presencia de dos factores comunes
7.4. INDICADORES DE PRODUCCION 113
a estas ocho series, cada uno de ellos integrado en las once frecuencias estacionales y enla frecuencia cero. Se entiende entonces que la estructura de estas series de produccionse encuentra “guiada” por unicamente dos factores. La estimacion de los factores, por elmetodo propuesto en el Capıtulo 6 y posteriormente la estimacion de la matriz de ponde-raciones, muestra que GRA es la variable que en mayor medida afecta al primer factor, eINT la que mas participacion tiene en el segundo, sin embargo no son solo ellas las quedeterminan su evolucion, los dos factores comunes se determinan como medias ponde-radas de las ocho variables y no existen grandes diferencias entre las ponderaciones quecada variable recibe en el factor. Dichos factores son capaces de explicar el 61,63 % dela variacion total de las series en su conjunto.
En el modelo de factores comunes, se produce un alto ajuste a las series GRA y HOT,sin embargo no se puede considerar que estas series sean los factores comunes, pues laestimacion del modelo sustituyendo los factores por estas variables produce residuoscon raıces unitarias.
Se ha planteado un modelo estructural para cada uno de los factores y se han esti-mado sus componentes. El analisis de los componentes estacionales estimados muestraque en ambas series el ciclo estacional presenta valles en los meses de agosto y picos endiciembre-enero. Sin embargo, la matriz de ponderaciones estimada (A1) muestra queen cada variable los dos factores reciben ponderaciones de signo contrario, por lo que,tomando como base los factores, es difıcil establecer conclusiones sobre el comporta-miento estacional de todo el conjunto de variables. Sin embargo, la observacion de losgraficos de las paginas G35 y G36 permite extraer alguna conclusion en este sentido.En todas las series, excepto en GRA y HOT se distingue un valle estacional en el mesde Agosto, que en dichas series GRA y HOT se transforma en un pico. Los factoresdeterminan un pico aproximadamente en diciembre para todas las series excepto HOT;por el contrario, dicho pico no se observa en todas las series originales.
El hecho de haber encontrado dos factores comunes, y que estos tengan ponderacio-nes de signo contrario en la matriz A1 dificulta la interpretacion de los resultados ya quedependiendo de las ponderaciones que se obtengan en la matriz A1 para cada serie, sepueden obtener distintos tipos de ciclos estacionales en cada una de ellas.
La estimacion del componente de tendencia de los factores nos muestra (paginas155 y 156) que las dos series que “dirigen” la evolucion a largo plazo de las ocho se-ries consideradas son paseos aleatorios con rumbo. En la tendencia del primer factor seaprecia una mayor influencia de la serie GRA, siguiendo este factor una tendencia casilineal, como en dicha serie. Por el contrario, en la tendencia del segundo factor se notauna mayor influencia de los componentes del IPI, como INT, CON o MET, reflejandouna evolucion a largo plazo similar a estas series.
A la hora de interpretar lo que los dos factores comunes representan, hay que teneren cuenta la propia definicion de lo que es un factor comun. Cada uno de los factores co-munes completos contiene la parte permanente de cada serie que es comun a todas ellas;por lo tanto, este par de factores se puede considerar como un par de series que son re-presentantes de la evolucion permanente de todo el conjunto. Evolucion que contiene uncomponente permanente de tendencia, ası como un componente estacional permanente.

114 CAPITULO 7. INDICADORES ECONOMICOS
Capıtulo 8
Conclusiones
En el presente trabajo se estudian modelos factoriales en los que los factores co-munes son componentes de tendencia (paseos aleatorios + rumbo) y/o componentesestacionales. Para los componentes estacionales se ha supuesto una estructura SI(1), esdecir, una estructura autorregresiva con una raız unitaria en cada frecuencia estacional.
En el Capıtulo 3 se ha demostrado que un vector de series temporales cointegradoestacional y uniformemente se puede representar mediante un modelo de factores esta-cionales comunes, cuyos factores tienen la estructura antes mencionada, y viceversa. Laexistencia o no de raıces unitarias en frecuencias distintas de las estacionales no afecta ala representacion de factores comunes del modelo, ya que, en las ecuaciones del mismo,solo se supone que las perturbaciones son SI(0), independientemente de lo que ocurraen las frecuencias no estacionales. Por otra parte, para que la demostracion sea valida,es necesario que el numero de vectores cointegrantes sea el mismo en cada una de lasfrecuencias estacionales. Si en alguna de ellas existieran mas vectores cointegrantes queen las demas, esto implicarıa que, en la representacion de factores comunes, aparecerıanraıces unitarias en el componente de medias moviles de los factores.
Siguiendo la misma lınea que en la demostracion del Capıtulo 3, se puede considerarun vector de series temporales cointegrado al mismo tiempo en la frecuencia cero yen las frecuencias estacionales. Si los vectores cointegrantes son comunes a todas lasfrecuencias, la demostracion del Capıtulo 3 se extiende de manera obvia para este caso.La representacion de factores comunes de este vector sera entonces:
yt = Aft + εt
con (1− LS) ft = ωt
siendo εt y ωt series I0(0) y SI(0) simultaneamente.En el Capıtulo 4 se revisan algunos de los mas importantes contrastes de raıces
unitarias para la frecuencia cero, contrastes de raıces unitarias estacionales y contrastesde cointegracion.
En el Capıtulo 5 se proponen dos contrastes especıficos para la hipotesis de inte-gracion estacional uniforme. El primero de ellos esta basado en el estadıstico F de los
115
116 CAPITULO 8. CONCLUSIONES
coeficientes γ1, . . . , γS−1 en la ecuacion:
S(L)xt = γ0 + γ1xt−1 + · · ·+ γS−1xt−(S−1) + εt.
Se ha calculado su distribucion empırica, para S = 12, por medio del metodo de Mon-tecarlo y sus valores crıticos se recogen en el Cuadro 5.1 (pag.43).
El segundo contraste esta basado en el estadıstico t del coeficiente γ en la ecuacion:
S(L)xt = µ+ γ xt−1 +[1− (1− γ)2
]xt−2 + · · ·+
[1− (1− γ)S−1
]xt−(S−1) + εt
Se ha hallado, por medio de simulaciones, una aproximacion empırica a la distribuciondel estadıstico t del coeficiente γ, cuando S = 12. Los valores cıticos se presentan en elCuadro 5.5 (Pagina 53)
Las pruebas de potencia de ambos contrastes se presentan en las secciones 5.3 y5.5.1. En general el estadıstico FD se muestra mas potente que el t(γ) ante cualquieralternativa.
Se han revisado dos metodos de estimacion de modelos con tendencias comunes(Fernandez Macho, 1986; Gonzalo y Granger, 1991) y uno para la estimacion de mode-los con factores estacionales comunes (Fernandez Macho, 1986). Partiendo del metodode Gonzalo y Granger, dedicado a la estimacion de modelos con factores de tendenciacomun, se plantea y desarrolla una adaptacion del mismo para obtener la estimacion demodelos con factores comunes estacionales (uniformes) o con factores comunes com-pletos (con componente de tendencia y componente estacional). Este metodo, el relacional de Fernandez se muestra computacionalmente mas rapido y de mas sencilla progra-macion.
El metodo se basa en imponer dos restricciones para la identificacion del modelo defactores comunes, estas restricciones son distintas a las establecidas en el Capıtulo 2 y,de forma resumida, implican que:
1. Los factores han de ser combinaciones lineales de las variables originales.
2. La matriz de ponderaciones de las combinaciones lineales ha de elegirse de talforma que los factores determinen una descomposicion en parte permanente-partetransitoria de las series.
Se extiende la definicion de Gonzalo y Granger (1991) de descomposicion permanente-transitoria, poara que incluya la posibilidad de descomposicion en el componente esta-cional, de manera que pueda existir una parte estacional permanente y una parte estacio-nal transitoria.
Se demuestra entonces que el mecanismo de correccion de error correspondiente aun vector cointegrado estacional y uniformemente, presenta una sola matriz de coefi-cientes de ajuste γ que afecta a todas las frecuencias y, por tanto, si se elige la matriz deponderaciones γ⊥ (tal que γ′γ⊥ = 0), la combinacion lineal ft = γ′⊥xt determina unadescomposicion permanente-transitoria en el vector de series inicial. Entonces se puedeconsiderar ft como una posible normalizacion de los factores comunes del modelo. La
117
matriz γ⊥ se puede estimar por un procedimiento similar al propuesto por Gonzalo yGranger (1991).
En el Capıtulo 7 se muestran dos aplicaciones de los modelos de factores comunes.En la primera de ellas se ha intentado contrastar, por medio de los contrastes de coin-tegracion y cointegracion estacional, la existencia de tendencias y factores estacionalescomunes dentro de tres grupos de indicadores cıclicos. El analisis se ha basado en laclasificacion de indicadores cıclicos realizada por Fernandez Macho (1991). Los tresgrupos estudiados han sido: el conjunto de indicadores que, en dicho artıculo, formaronel ciclo de referencia; los indicadores que se consideraron adelantados respecto al cicloeconomico; y el grupo de indicadores retrasados con respecto a dicho ciclo. El resultadodel estudio ha sido el siguiente:
1. No se ha encontrado cointegracion estacional uniforme, ni por tanto, factores co-munes estacionales uniformes en ninguno de los tres grupos considerados.
2. Se han encontrado tres relaciones de cointegracion en la frecuencia cero en unsubconjunto formado por cuatro de las series que formaron el ciclo de referencia(PARNAG, PERHOT, IPI y CREPRI). Las relaciones de cointegracion son de tipoC(2, 1), y por tanto, son relaciones entre los crecimientos de dichas series.
3. Dado que en ese conjunto de cuatro series se han encontrado tres relaciones decointegracion, esto implica la existencia de un factor comun entre los crecimien-tos de dichas series. Este factor comun se ha estimado por el procedimiento deGonzalo y Granger (1991) y se ha representado en el grafico G9. Dicho factor sepuede interpretar como un indicador sintetico de la tasa de crecimiento de la acti-vidad economica en Espana. La trayectoria del factor se muestra coherente con laevolucion del crecimiento de la actividad economica percibido a lo largo de todoel perıodo muestral. Tambien se muestra razonablemente de acuerdo con el indi-cador de la tasa de crecimiento de la actividad economica calculado por FernandezMacho (1991), aun teniendo en cuenta las diferencias en su composicion.
4. Se ha encontrado solamente una relacion de cointegracion (en la frecuencia cero)entre los niveles de las demas series que formaron el ciclo de referencia y lasseries de residuos de las tres relaciones cointegrantes comentadas anteriormente.
5. No se ha encontrado ningun tipo de cointegracion en la frecuencia cero en losgrupos de indicadores adelantados y retrasados respecto al ciclo. Esto se puedeatribuir a la no homogeneidad de los desfases con respecto al ciclo entre seriesque forman parte del mismo grupo, ya que en el momento de clasificarlas se per-mitieron diferentes intervalos de adelanto (o en su caso de retraso) respecto alciclo.
En la segunda aplicacion se han seleccionado varios indicadores de produccion, re-ferentes a distintos sectores de la economıa, con el objeto de hallar el componente(s)permanente(s) comun a todo el conjunto. De las diez series consideradas, en ocho deellas se detecta la existencia de once raıces unitarias estacionales y una en la frecuencia
118 CAPITULO 8. CONCLUSIONES
cero, por tanto cabe la posibilidad de que exista cointegracion completa entre estas ochoseries. Se plantean y estiman ocho posibles ecuaciones cointegrantes. El analisis de losresiduos muestra la probable existencia de seis vectores de cointegracion completa. Ental caso, existen dos factores comunes a las ocho series, siendo cada factor una variablecon doce raıces unitarias (once estacionales y una en la frecuencia cero).
Se han estimado los factores mediante el procedimiento propuesto en la seccion 6.3.2.2.Estos factores se representan en las paginas G33 y G34. Graficamente, el primero de losfactores parece seguir una evolucion similar a la de la serie GRA. El segundo, sin embar-go, parece recoger una estructura similar a alguno de los componentes del IPI estudiados.En concreto, se parece bastante a las series INT y CON. La estimacion de la matriz deponderaciones del modelo muestra que se produce un ajuste muy alto entre el modelo ylas series GRA y HOT, no siendo tan elevado para el resto de las series. Sin embargo, seha comprobado que no se puede considerar que dichas series sean los factores comunes,pues la influencia del resto de las series tambien es importante.
Una vez obtenidos los factores, cada uno de ellos se puede tratar como una serieunivariante cualquiera. Ası, es posible plantear para ellos un modelo estructural de laforma:
yt = µt + st + εt (8.1)
y, a partir de el, hallar los componentes de tendencia y estacional de cada una de lasseries y obtener conclusiones acerca de ellos. Sin embargo el hecho de que sean dos losfactores comunes dentro del conjunto estudiado dificulta considerablemente la interpre-tacion de los componentes.
Los dos factores que se han obtenido se pueden considerar representantes de la es-tructura permanente de todo el conjunto, reflejando la existencia de un componente detendencia comun a todo el grupo ası como de un componente estacional que es perma-nente y tambien comun.
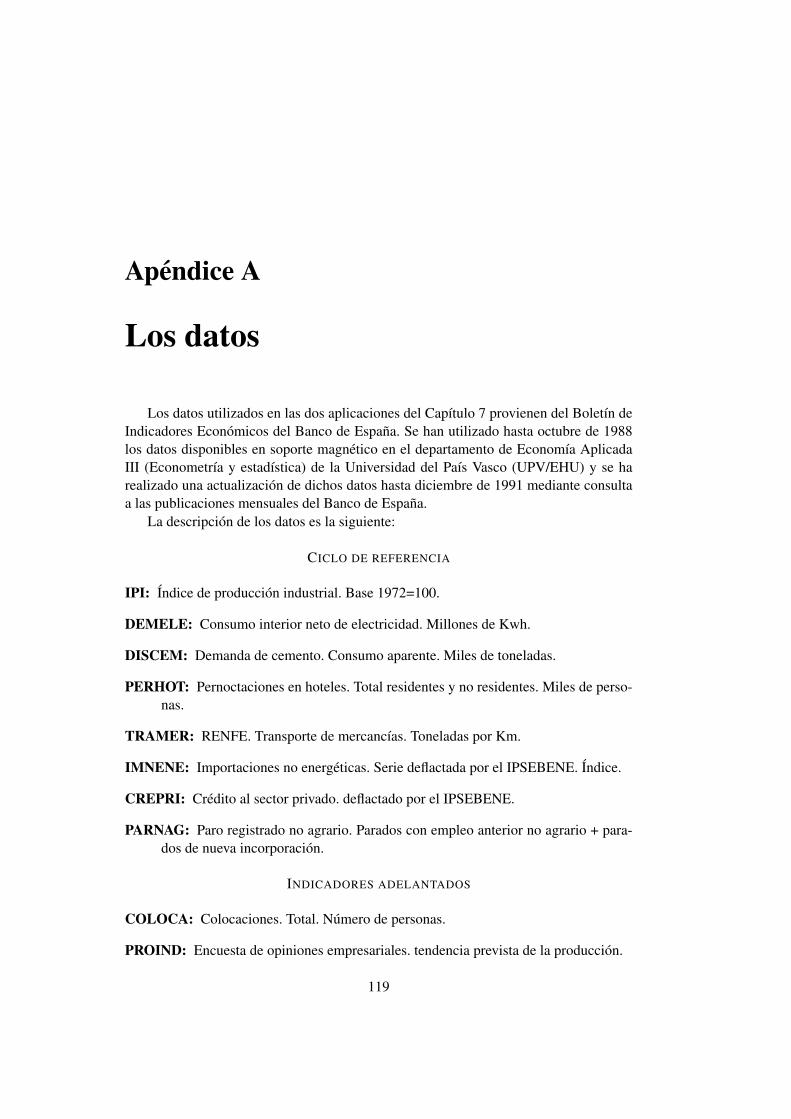
Apendice A
Los datos
Los datos utilizados en las dos aplicaciones del Capıtulo 7 provienen del Boletın deIndicadores Economicos del Banco de Espana. Se han utilizado hasta octubre de 1988los datos disponibles en soporte magnetico en el departamento de Economıa AplicadaIII (Econometrıa y estadıstica) de la Universidad del Paıs Vasco (UPV/EHU) y se harealizado una actualizacion de dichos datos hasta diciembre de 1991 mediante consultaa las publicaciones mensuales del Banco de Espana.
La descripcion de los datos es la siguiente:
CICLO DE REFERENCIA
IPI: Indice de produccion industrial. Base 1972=100.
DEMELE: Consumo interior neto de electricidad. Millones de Kwh.
DISCEM: Demanda de cemento. Consumo aparente. Miles de toneladas.
PERHOT: Pernoctaciones en hoteles. Total residentes y no residentes. Miles de perso-nas.
TRAMER: RENFE. Transporte de mercancıas. Toneladas por Km.
IMNENE: Importaciones no energeticas. Serie deflactada por el IPSEBENE. Indice.
CREPRI: Credito al sector privado. deflactado por el IPSEBENE.
PARNAG: Paro registrado no agrario. Parados con empleo anterior no agrario + para-dos de nueva incorporacion.
INDICADORES ADELANTADOS
COLOCA: Colocaciones. Total. Numero de personas.
PROIND: Encuesta de opiniones empresariales. tendencia prevista de la produccion.
119
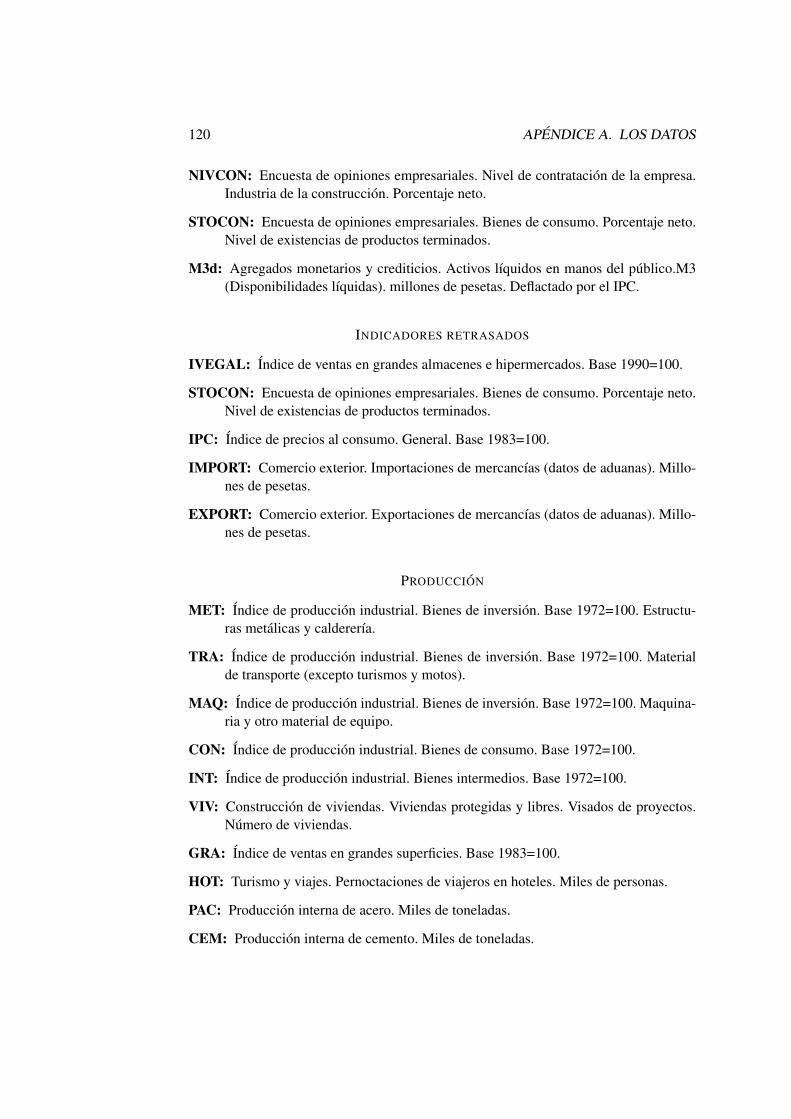
120 APENDICE A. LOS DATOS
NIVCON: Encuesta de opiniones empresariales. Nivel de contratacion de la empresa.Industria de la construccion. Porcentaje neto.
STOCON: Encuesta de opiniones empresariales. Bienes de consumo. Porcentaje neto.Nivel de existencias de productos terminados.
M3d: Agregados monetarios y crediticios. Activos lıquidos en manos del publico.M3(Disponibilidades lıquidas). millones de pesetas. Deflactado por el IPC.
INDICADORES RETRASADOS
IVEGAL: Indice de ventas en grandes almacenes e hipermercados. Base 1990=100.
STOCON: Encuesta de opiniones empresariales. Bienes de consumo. Porcentaje neto.Nivel de existencias de productos terminados.
IPC: Indice de precios al consumo. General. Base 1983=100.
IMPORT: Comercio exterior. Importaciones de mercancıas (datos de aduanas). Millo-nes de pesetas.
EXPORT: Comercio exterior. Exportaciones de mercancıas (datos de aduanas). Millo-nes de pesetas.
PRODUCCION
MET: Indice de produccion industrial. Bienes de inversion. Base 1972=100. Estructu-ras metalicas y caldererıa.
TRA: Indice de produccion industrial. Bienes de inversion. Base 1972=100. Materialde transporte (excepto turismos y motos).
MAQ: Indice de produccion industrial. Bienes de inversion. Base 1972=100. Maquina-ria y otro material de equipo.
CON: Indice de produccion industrial. Bienes de consumo. Base 1972=100.
INT: Indice de produccion industrial. Bienes intermedios. Base 1972=100.
VIV: Construccion de viviendas. Viviendas protegidas y libres. Visados de proyectos.Numero de viviendas.
GRA: Indice de ventas en grandes superficies. Base 1983=100.
HOT: Turismo y viajes. Pernoctaciones de viajeros en hoteles. Miles de personas.
PAC: Produccion interna de acero. Miles de toneladas.
CEM: Produccion interna de cemento. Miles de toneladas.

121
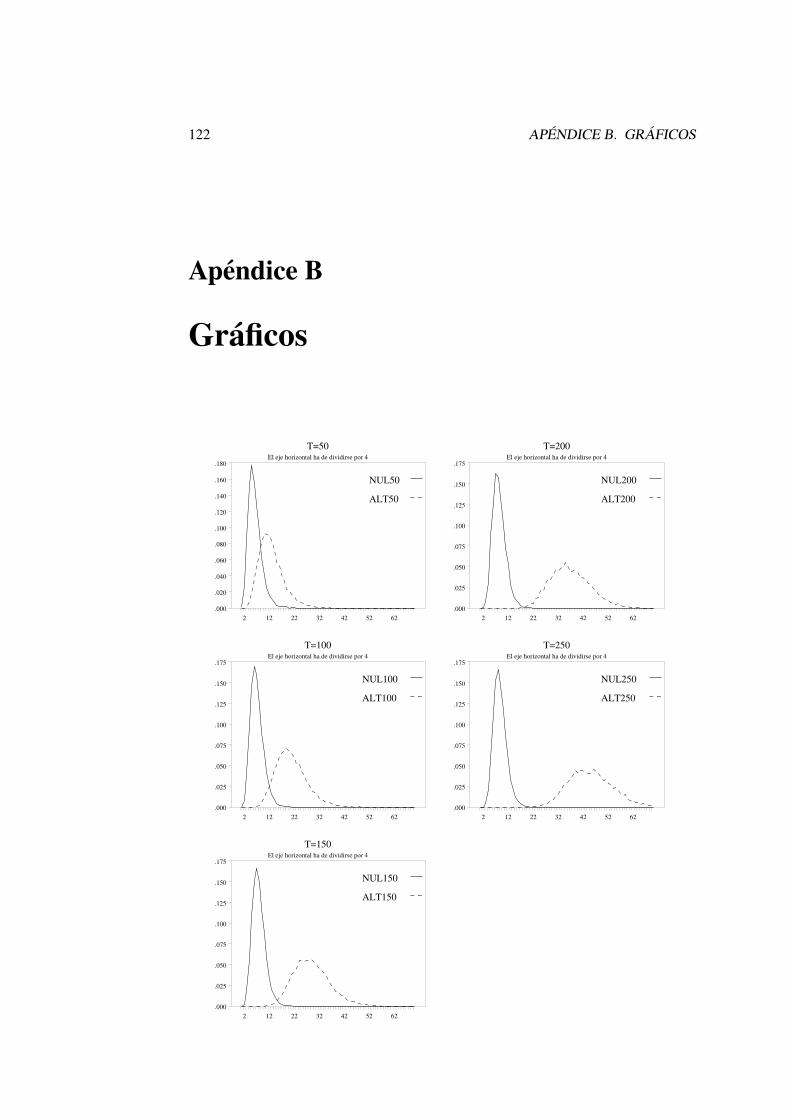
122 APENDICE B. GRAFICOS
Apendice B
Graficos
T=50El eje horizontal ha de dividirse por 4
2 12 22 32 42 52 62.000
.020
.040
.060
.080
.100
.120
.140
.160
.180
NUL50
ALT50
T=100El eje horizontal ha de dividirse por 4
2 12 22 32 42 52 62.000
.025
.050
.075
.100
.125
.150
.175
NUL100
ALT100
T=150El eje horizontal ha de dividirse por 4
2 12 22 32 42 52 62.000
.025
.050
.075
.100
.125
.150
.175
NUL150
ALT150
T=200El eje horizontal ha de dividirse por 4
2 12 22 32 42 52 62.000
.025
.050
.075
.100
.125
.150
.175
NUL200
ALT200
T=250El eje horizontal ha de dividirse por 4
2 12 22 32 42 52 62.000
.025
.050
.075
.100
.125
.150
.175
NUL250
ALT250
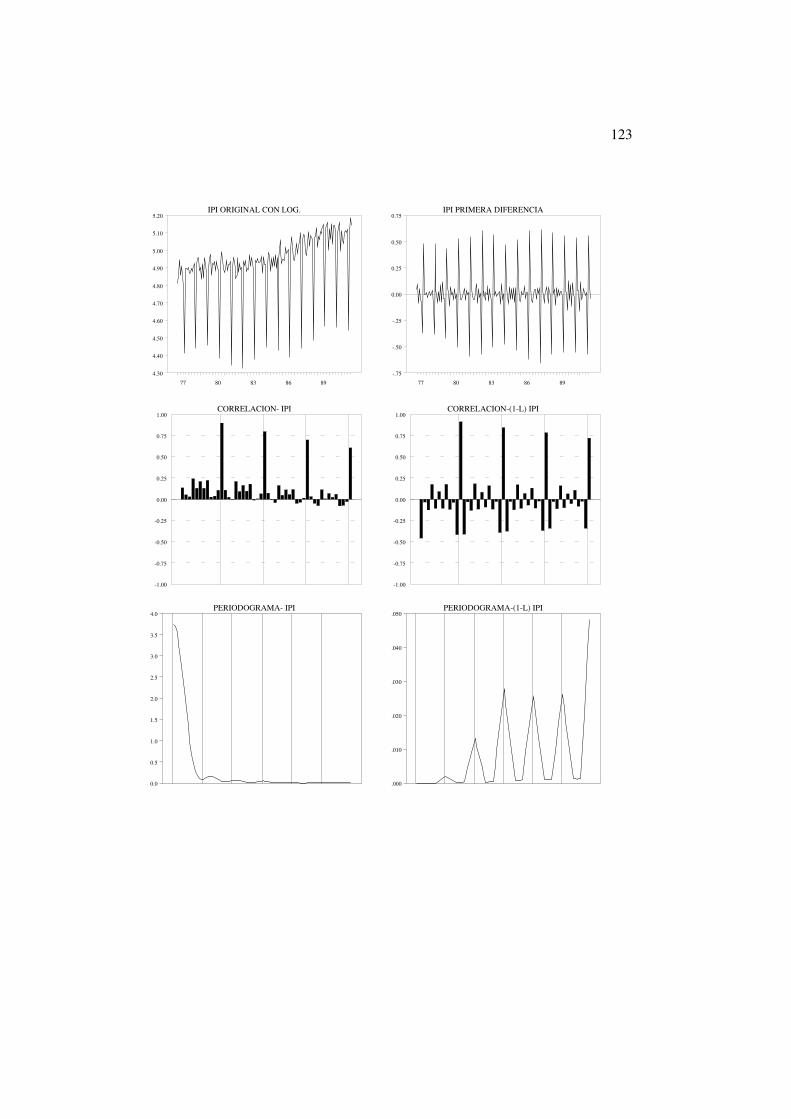
123
IPI ORIGINAL CON LOG.
77 80 83 86 89
4.30
4.40
4.50
4.60
4.70
4.80
4.90
5.00
5.10
5.20
CORRELACION- IPI
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- IPI
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
IPI PRIMERA DIFERENCIA
77 80 83 86 89
-.75
-.50
-.25
0.00
0.25
0.50
0.75
CORRELACION-(1-L) IPI
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) IPI
.000
.010
.020
.030
.040
.050
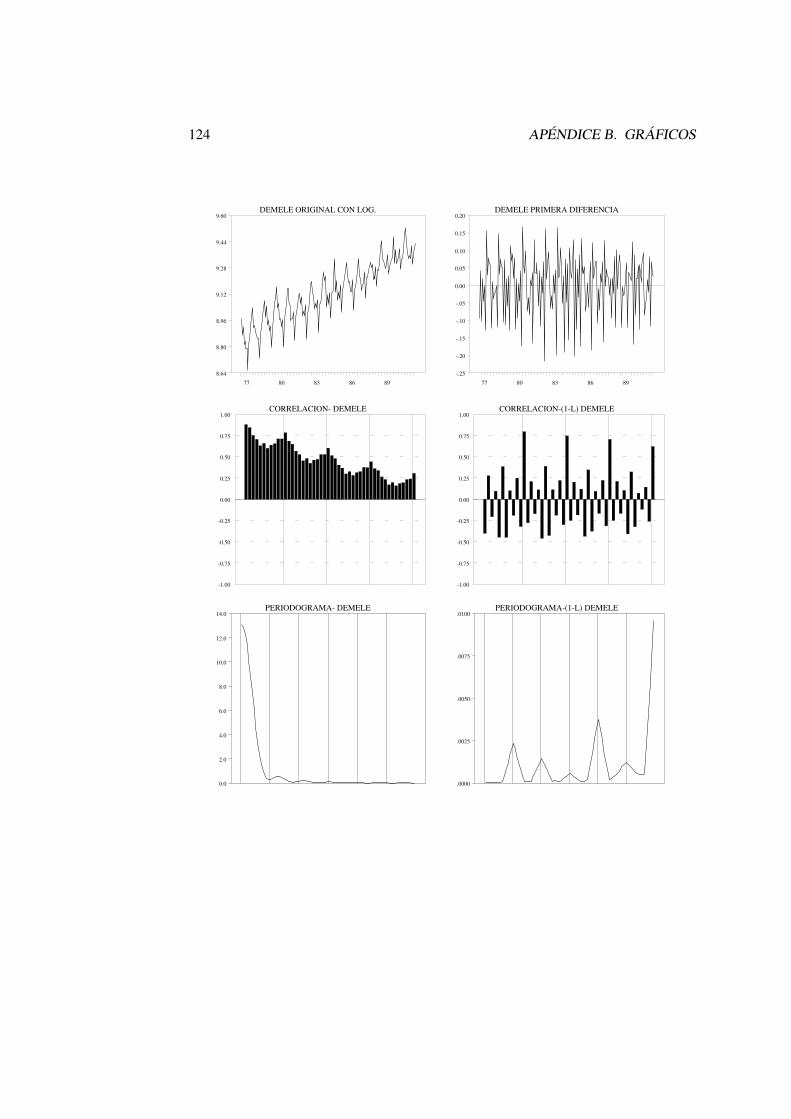
124 APENDICE B. GRAFICOS
DEMELE ORIGINAL CON LOG.
77 80 83 86 89
8.64
8.80
8.96
9.12
9.28
9.44
9.60
CORRELACION- DEMELE
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- DEMELE
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
DEMELE PRIMERA DIFERENCIA
77 80 83 86 89
-.25
-.20
-.15
-.10
-.05
0.00
0.05
0.10
0.15
0.20
CORRELACION-(1-L) DEMELE
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) DEMELE
.0000
.0025
.0050
.0075
.0100
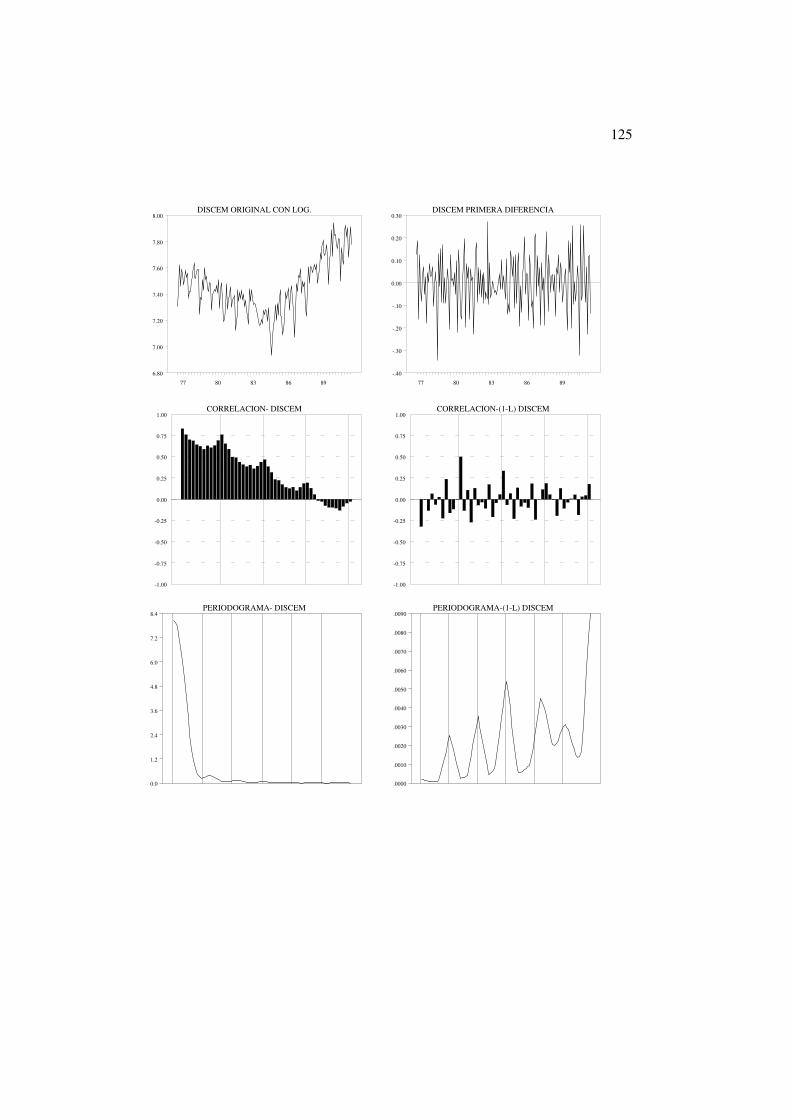
125
DISCEM ORIGINAL CON LOG.
77 80 83 86 89
6.80
7.00
7.20
7.40
7.60
7.80
8.00
CORRELACION- DISCEM
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- DISCEM
0.0
1.2
2.4
3.6
4.8
6.0
7.2
8.4
DISCEM PRIMERA DIFERENCIA
77 80 83 86 89
-.40
-.30
-.20
-.10
0.00
0.10
0.20
0.30
CORRELACION-(1-L) DISCEM
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) DISCEM
.0000
.0010
.0020
.0030
.0040
.0050
.0060
.0070
.0080
.0090
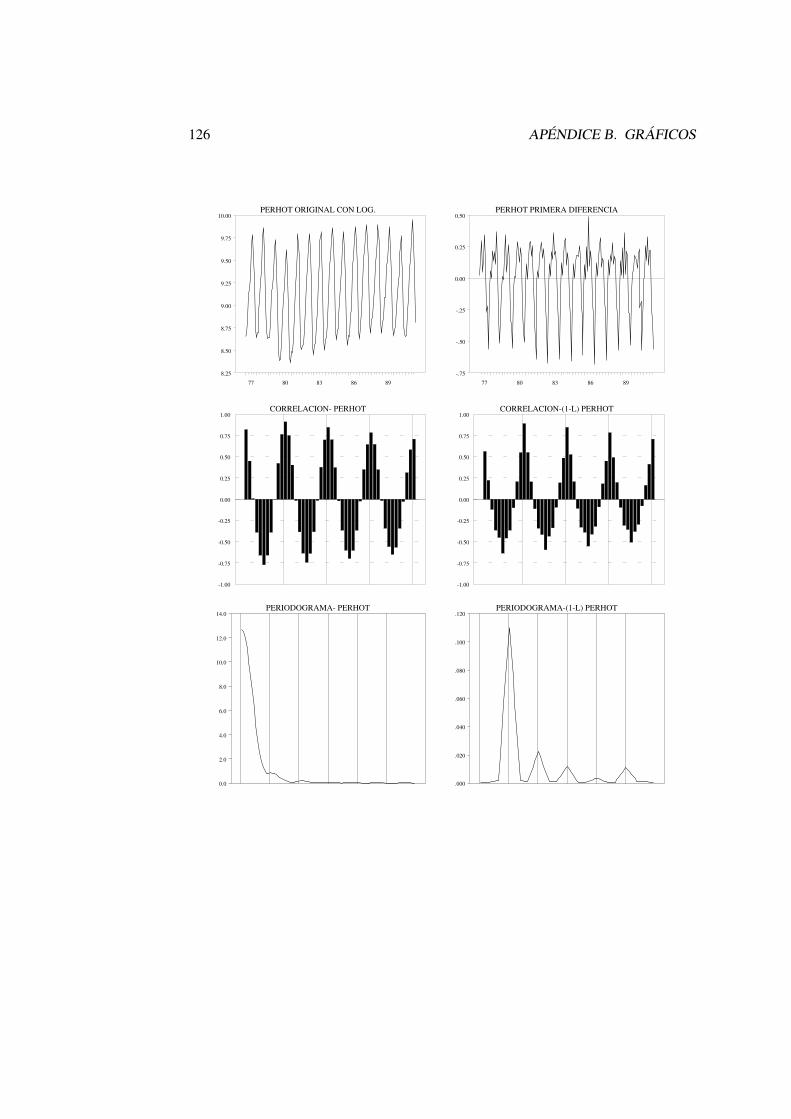
126 APENDICE B. GRAFICOS
PERHOT ORIGINAL CON LOG.
77 80 83 86 89
8.25
8.50
8.75
9.00
9.25
9.50
9.75
10.00
CORRELACION- PERHOT
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- PERHOT
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
PERHOT PRIMERA DIFERENCIA
77 80 83 86 89
-.75
-.50
-.25
0.00
0.25
0.50
CORRELACION-(1-L) PERHOT
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) PERHOT
.000
.020
.040
.060
.080
.100
.120
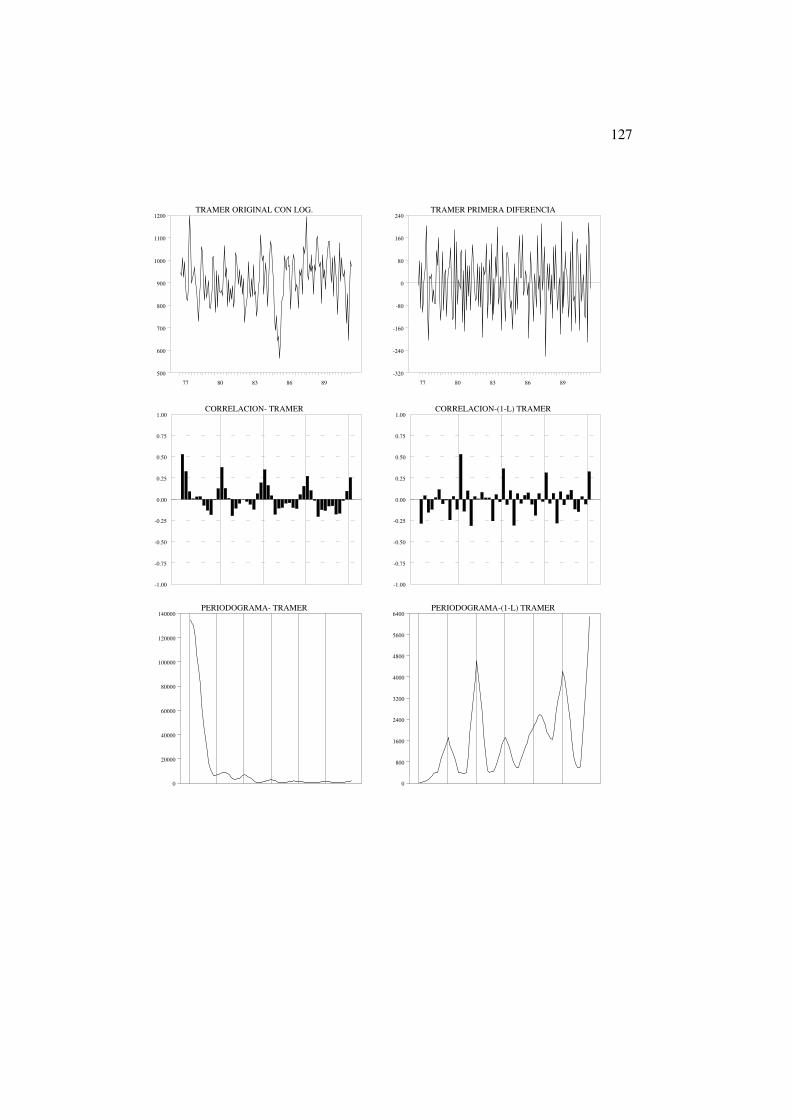
127
TRAMER ORIGINAL CON LOG.
77 80 83 86 89
500
600
700
800
900
1000
1100
1200
CORRELACION- TRAMER
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- TRAMER
0
20000
40000
60000
80000
100000
120000
140000
TRAMER PRIMERA DIFERENCIA
77 80 83 86 89
-320
-240
-160
-80
0
80
160
240
CORRELACION-(1-L) TRAMER
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) TRAMER
0
800
1600
2400
3200
4000
4800
5600
6400
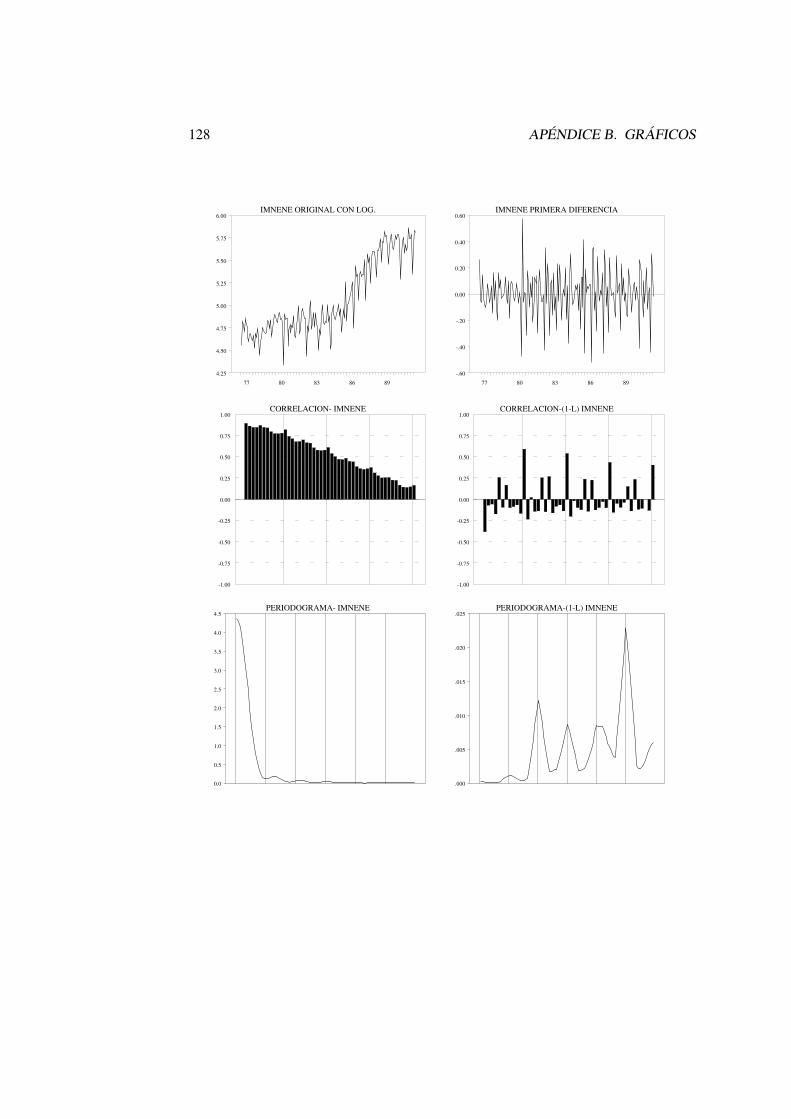
128 APENDICE B. GRAFICOS
IMNENE ORIGINAL CON LOG.
77 80 83 86 89
4.25
4.50
4.75
5.00
5.25
5.50
5.75
6.00
CORRELACION- IMNENE
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- IMNENE
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
IMNENE PRIMERA DIFERENCIA
77 80 83 86 89
-.60
-.40
-.20
0.00
0.20
0.40
0.60
CORRELACION-(1-L) IMNENE
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) IMNENE
.000
.005
.010
.015
.020
.025
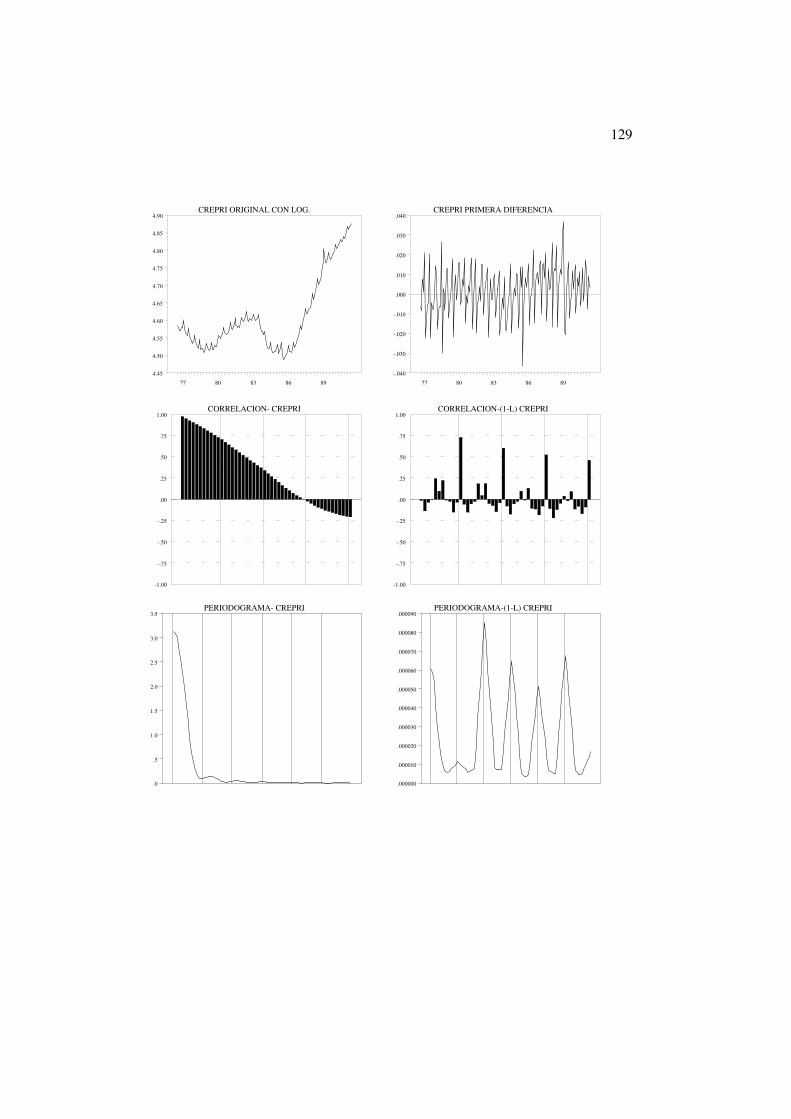
129
CREPRI ORIGINAL CON LOG.
77 80 83 86 89
4.45
4.50
4.55
4.60
4.65
4.70
4.75
4.80
4.85
4.90
CORRELACION- CREPRI
-1.00
-.75
-.50
-.25
.00
.25
.50
.75
1.00
PERIODOGRAMA- CREPRI
.0
.5
1.0
1.5
2.0
2.5
3.0
3.5
CREPRI PRIMERA DIFERENCIA
77 80 83 86 89
-.040
-.030
-.020
-.010
.000
.010
.020
.030
.040
CORRELACION-(1-L) CREPRI
-1.00
-.75
-.50
-.25
.00
.25
.50
.75
1.00
PERIODOGRAMA-(1-L) CREPRI
.000000
.000010
.000020
.000030
.000040
.000050
.000060
.000070
.000080
.000090
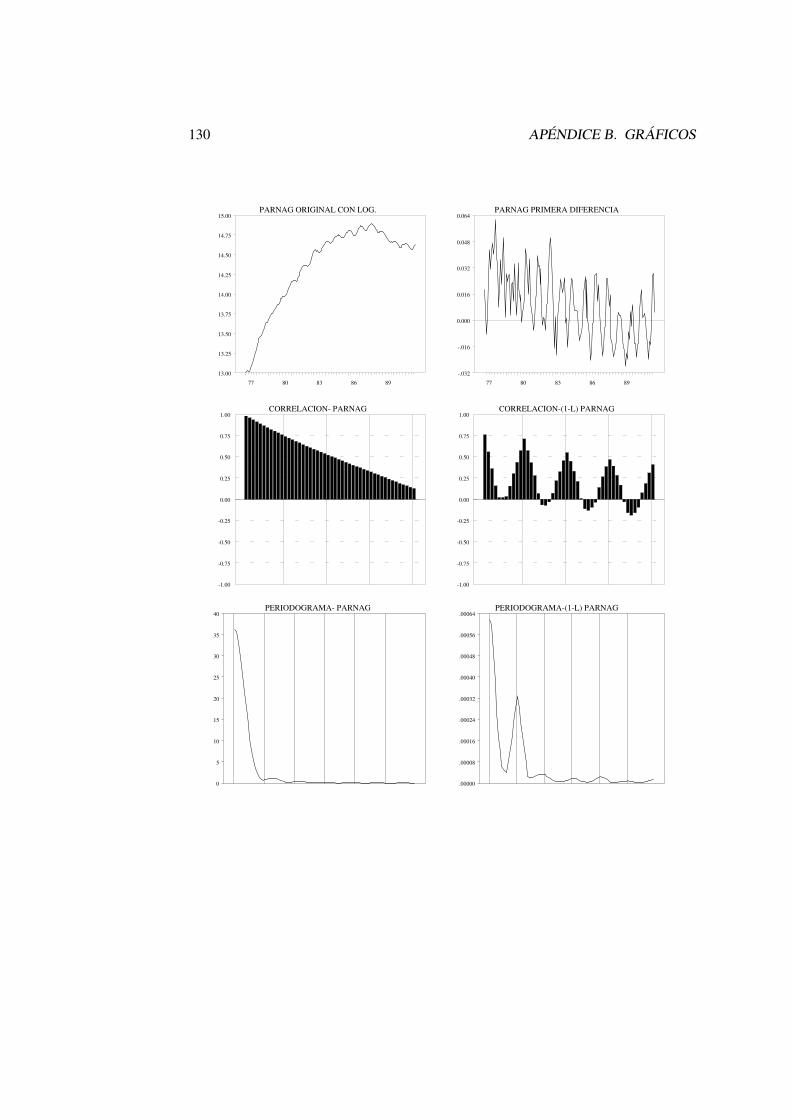
130 APENDICE B. GRAFICOS
PARNAG ORIGINAL CON LOG.
77 80 83 86 89
13.00
13.25
13.50
13.75
14.00
14.25
14.50
14.75
15.00
CORRELACION- PARNAG
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- PARNAG
0
5
10
15
20
25
30
35
40
PARNAG PRIMERA DIFERENCIA
77 80 83 86 89
-.032
-.016
0.000
0.016
0.032
0.048
0.064
CORRELACION-(1-L) PARNAG
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) PARNAG
.00000
.00008
.00016
.00024
.00032
.00040
.00048
.00056
.00064
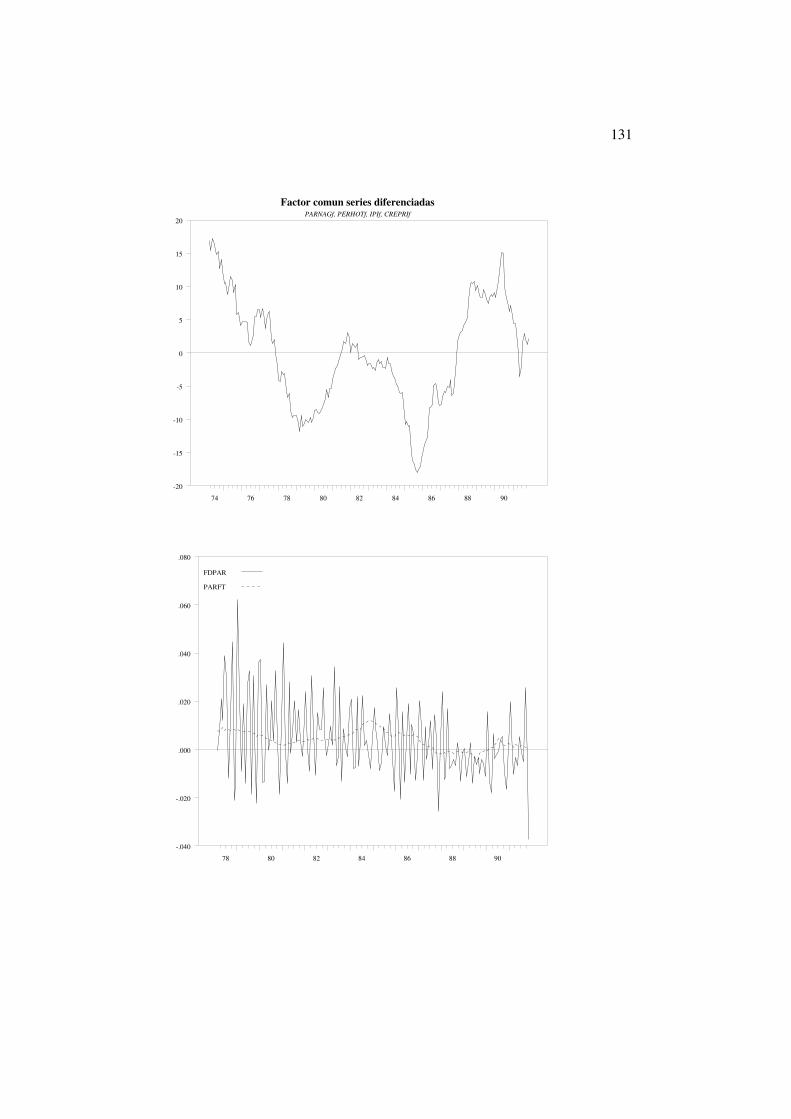
131
Factor comun series diferenciadasPARNAGf, PERHOTf, IPIf, CREPRIf
74 76 78 80 82 84 86 88 90
-20
-15
-10
-5
0
5
10
15
20
78 80 82 84 86 88 90
-.040
-.020
.000
.020
.040
.060
.080
FDPAR
PARFT
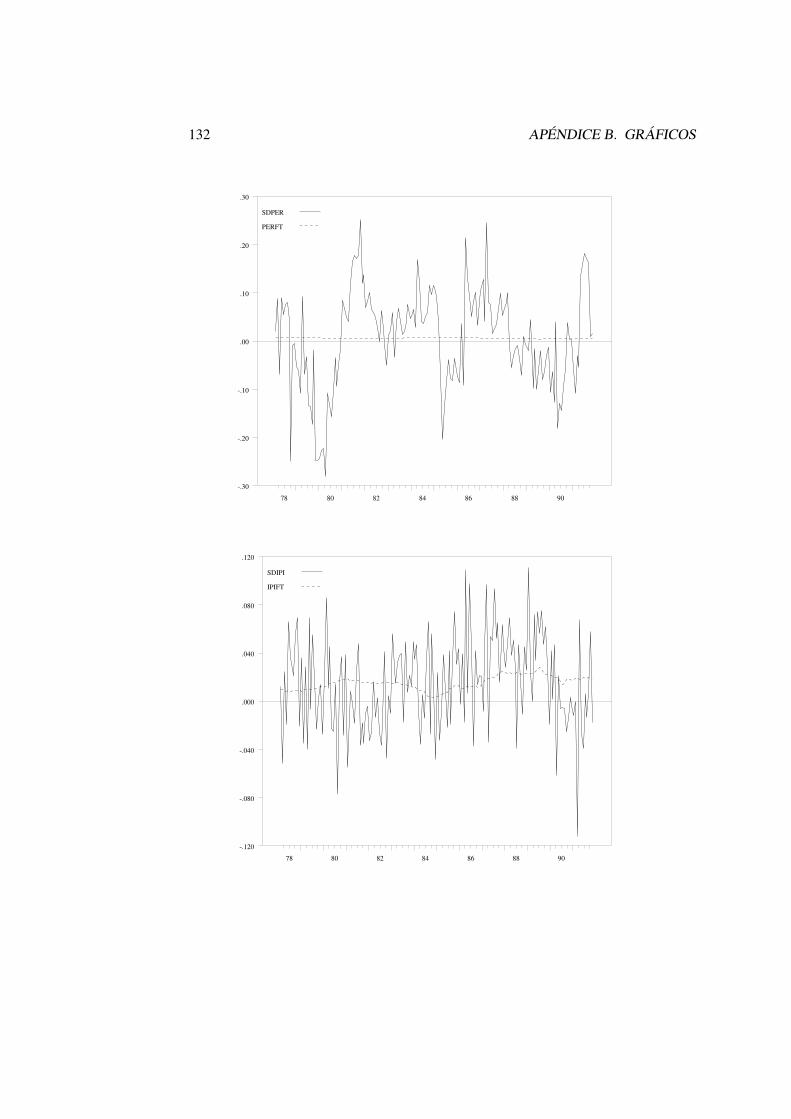
132 APENDICE B. GRAFICOS
78 80 82 84 86 88 90
-.30
-.20
-.10
.00
.10
.20
.30
SDPER
PERFT
78 80 82 84 86 88 90
-.120
-.080
-.040
.000
.040
.080
.120
SDIPI
IPIFT
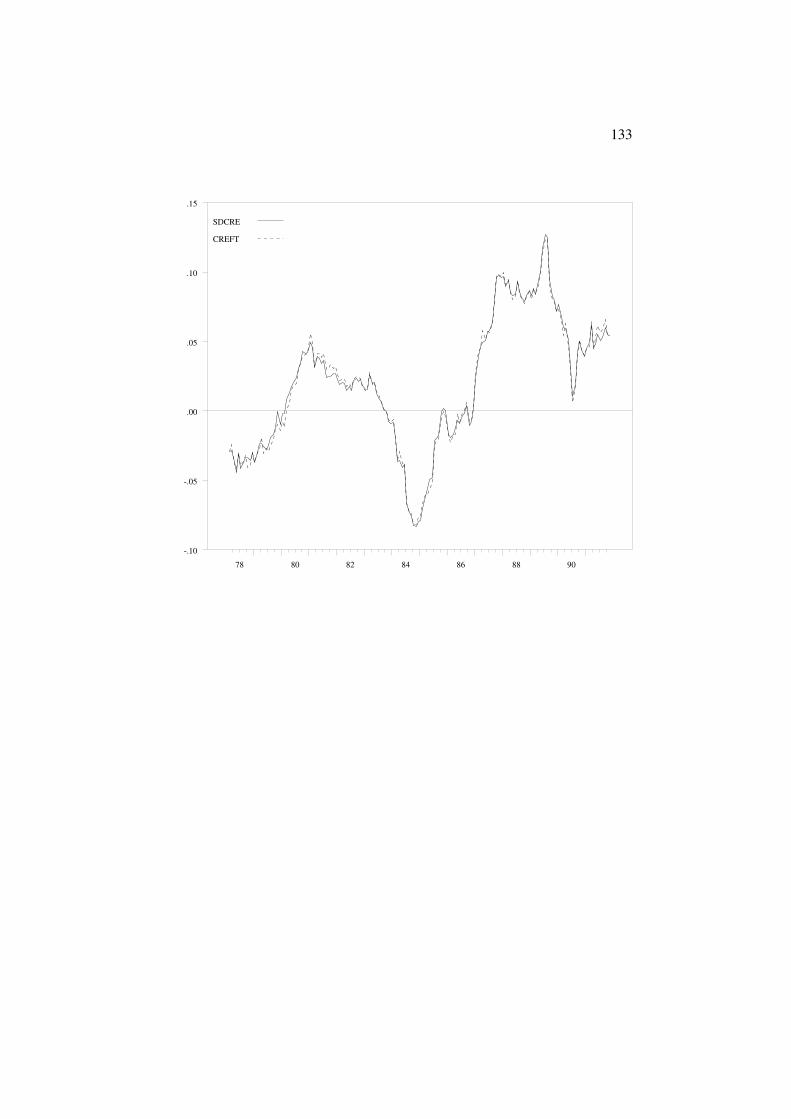
133
78 80 82 84 86 88 90
-.10
-.05
.00
.05
.10
.15
SDCRE
CREFT
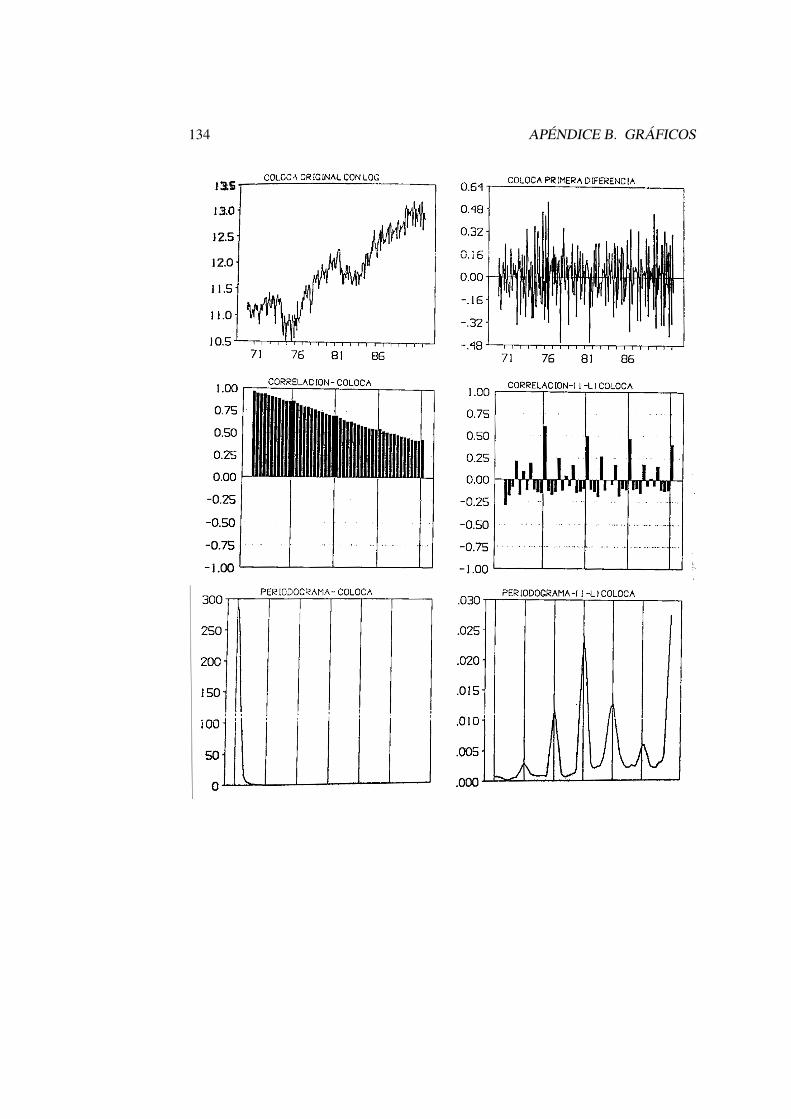
134 APENDICE B. GRAFICOS
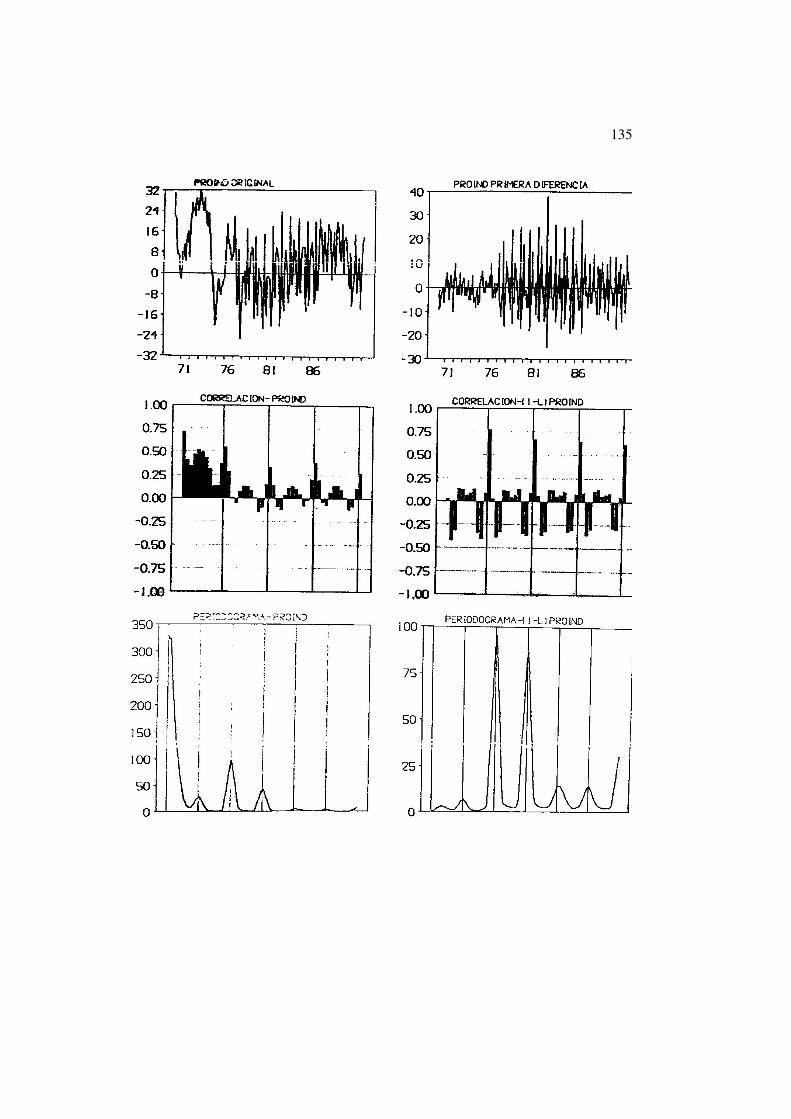
135
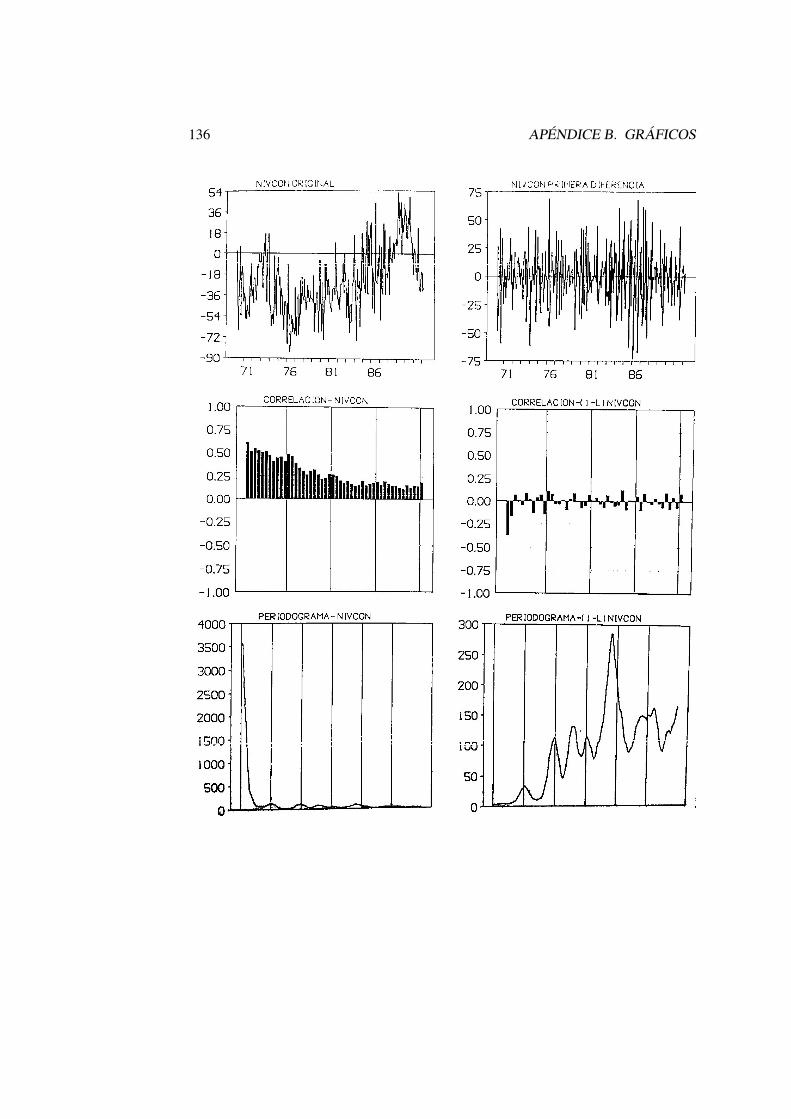
136 APENDICE B. GRAFICOS
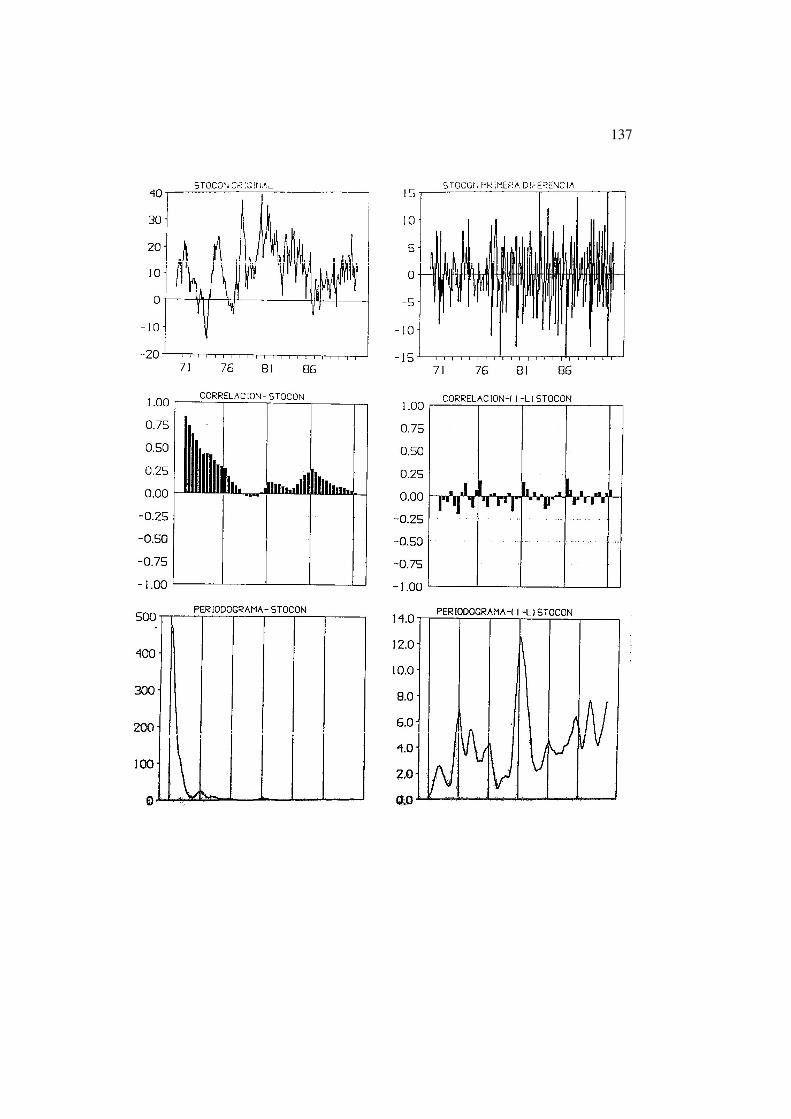
137
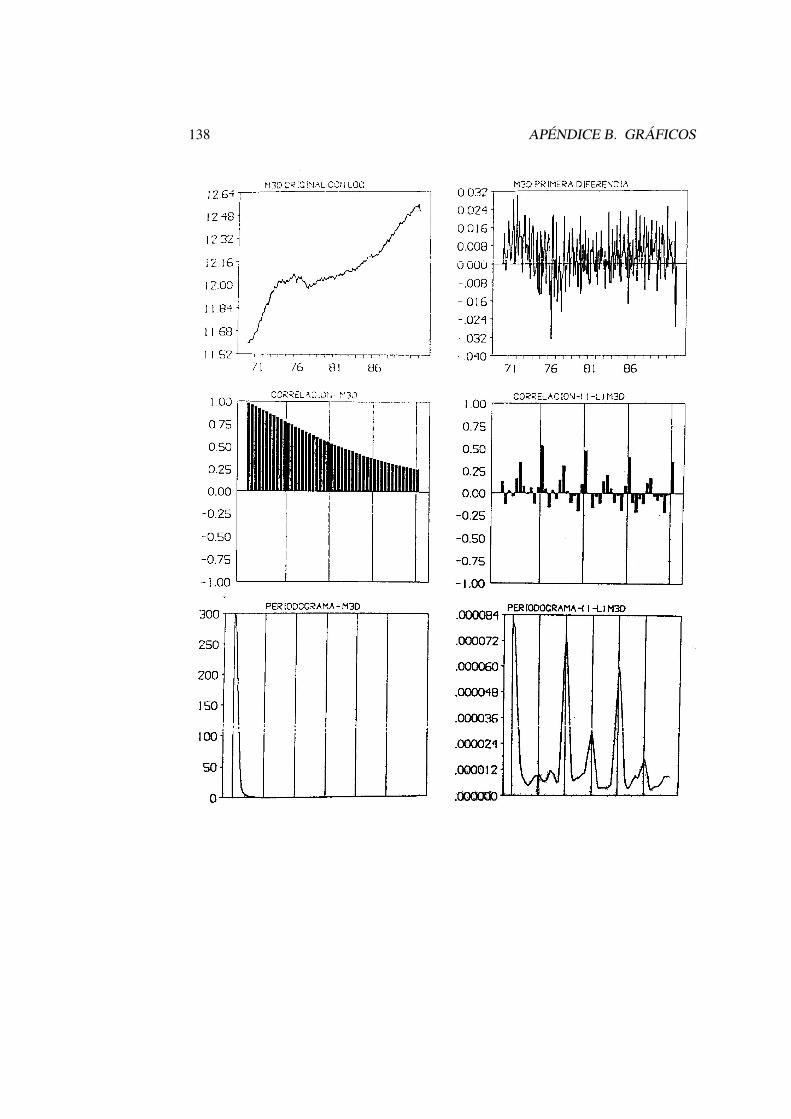
138 APENDICE B. GRAFICOS
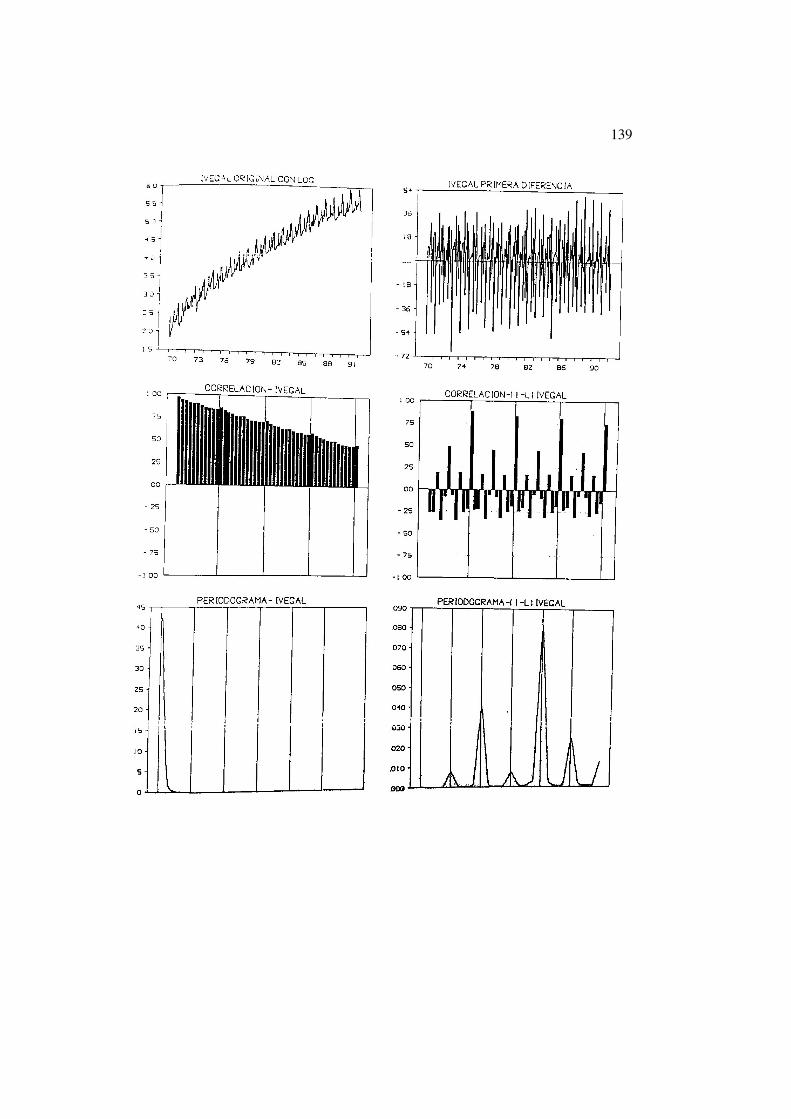
139
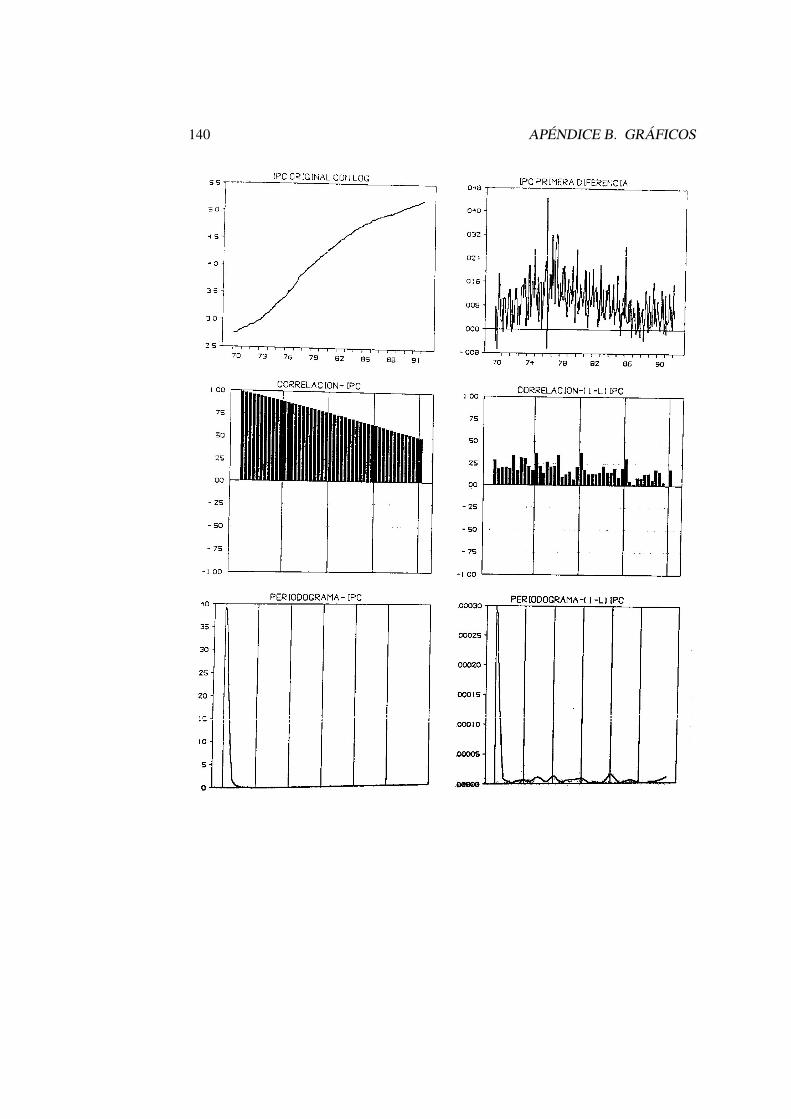
140 APENDICE B. GRAFICOS
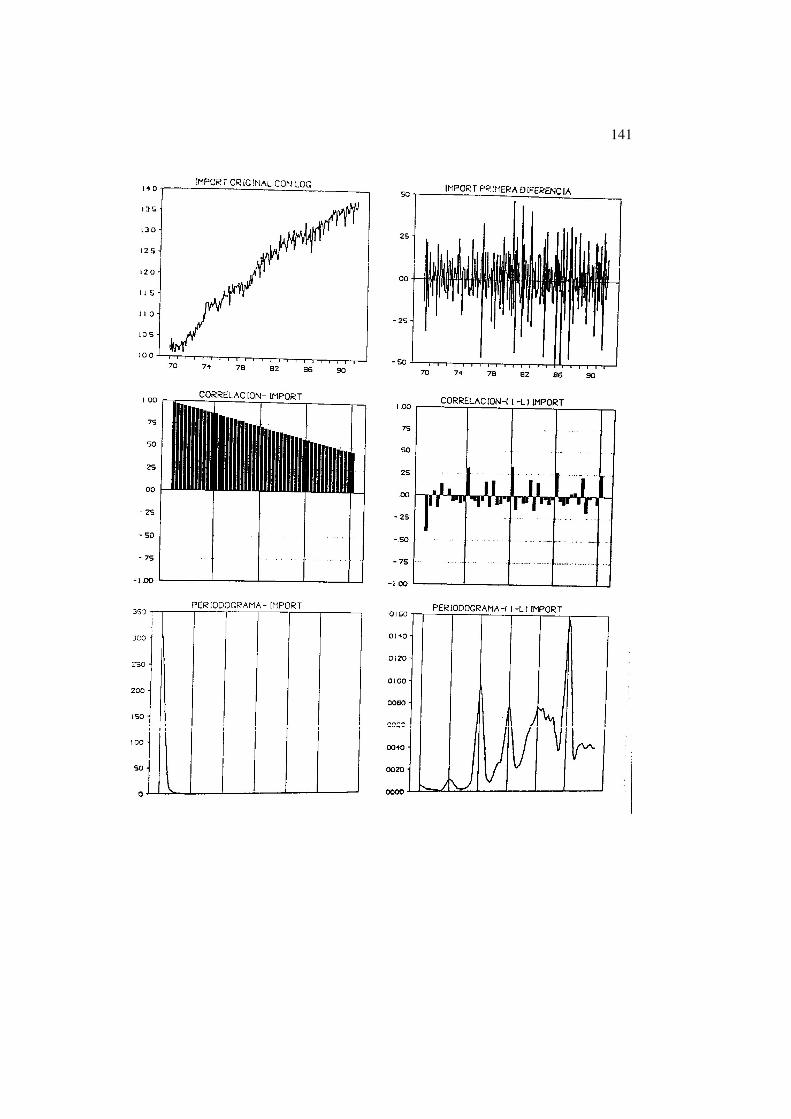
141
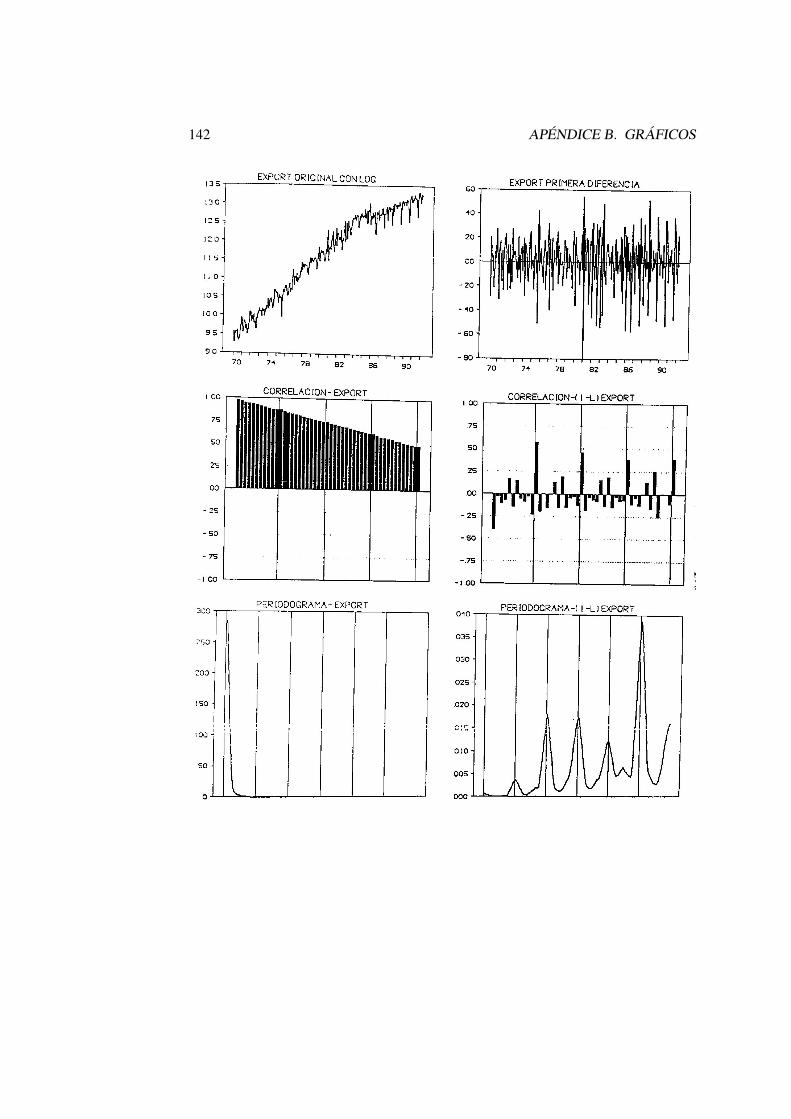
142 APENDICE B. GRAFICOS
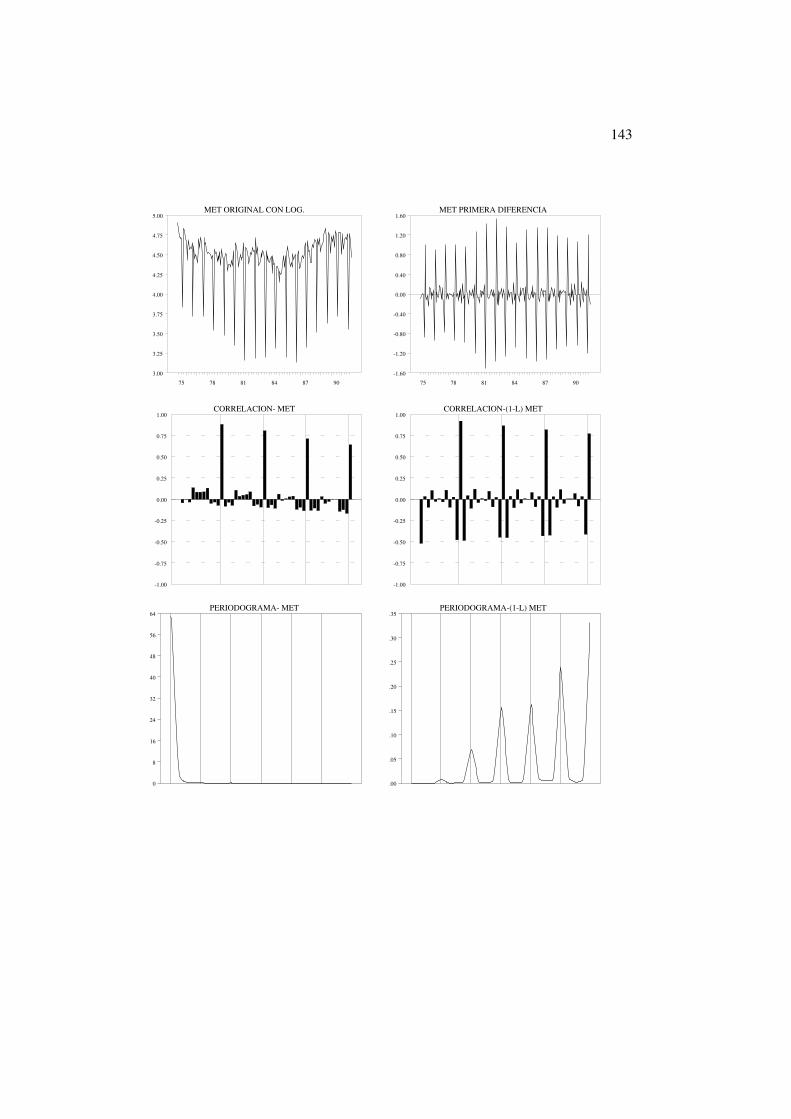
143
MET ORIGINAL CON LOG.
75 78 81 84 87 90
3.00
3.25
3.50
3.75
4.00
4.25
4.50
4.75
5.00
CORRELACION- MET
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- MET
0
8
16
24
32
40
48
56
64
MET PRIMERA DIFERENCIA
75 78 81 84 87 90
-1.60
-1.20
-0.80
-0.40
0.00
0.40
0.80
1.20
1.60
CORRELACION-(1-L) MET
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) MET
.00
.05
.10
.15
.20
.25
.30
.35
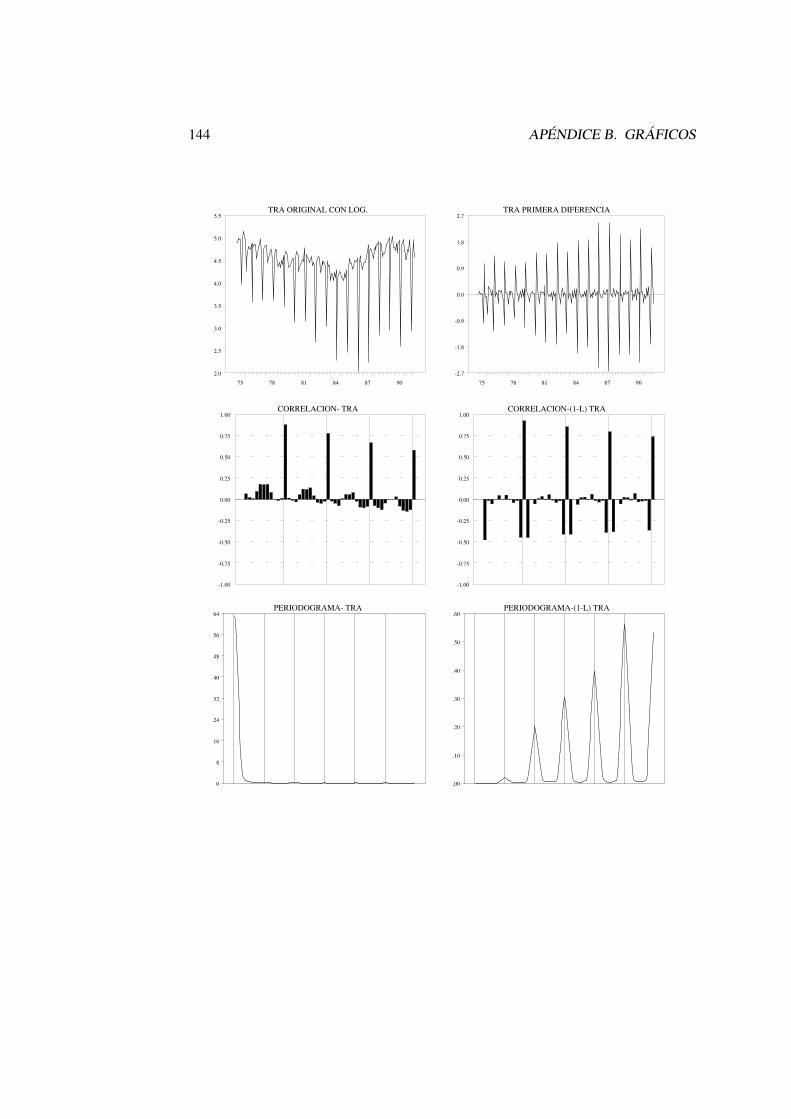
144 APENDICE B. GRAFICOS
TRA ORIGINAL CON LOG.
75 78 81 84 87 90
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
CORRELACION- TRA
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- TRA
0
8
16
24
32
40
48
56
64
TRA PRIMERA DIFERENCIA
75 78 81 84 87 90
-2.7
-1.8
-0.9
0.0
0.9
1.8
2.7
CORRELACION-(1-L) TRA
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) TRA
.00
.10
.20
.30
.40
.50
.60
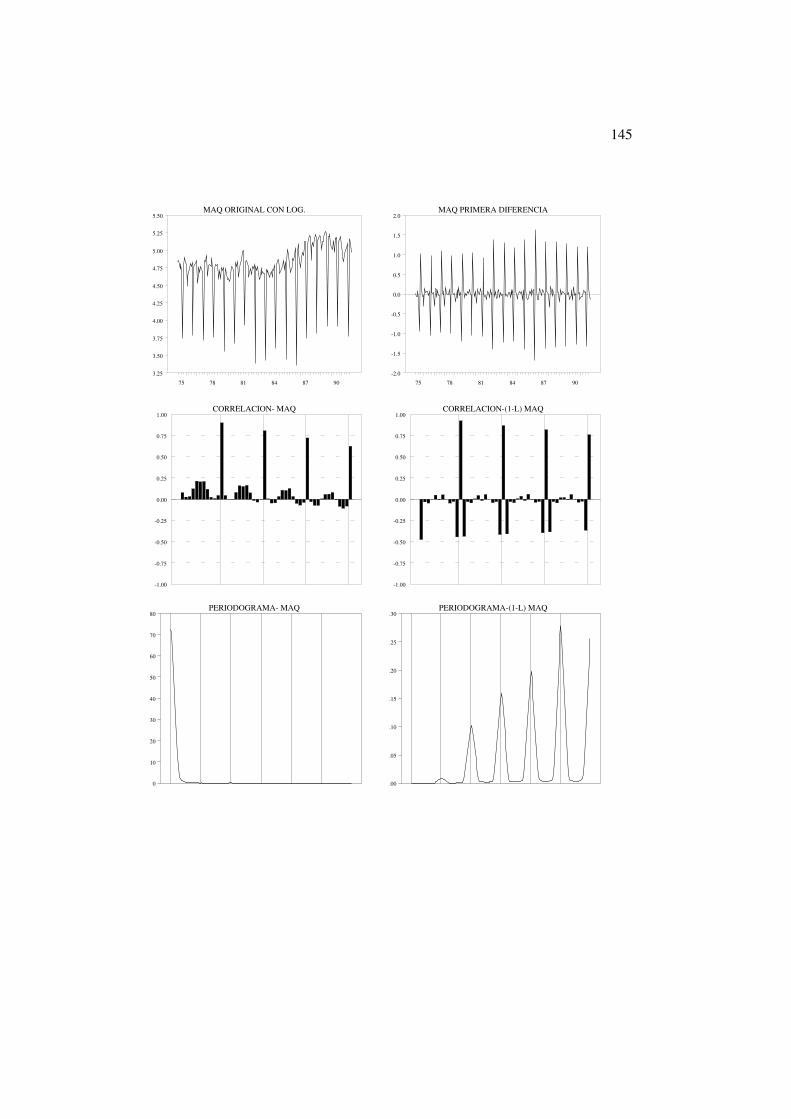
145
MAQ ORIGINAL CON LOG.
75 78 81 84 87 90
3.25
3.50
3.75
4.00
4.25
4.50
4.75
5.00
5.25
5.50
CORRELACION- MAQ
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- MAQ
0
10
20
30
40
50
60
70
80
MAQ PRIMERA DIFERENCIA
75 78 81 84 87 90
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
CORRELACION-(1-L) MAQ
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) MAQ
.00
.05
.10
.15
.20
.25
.30
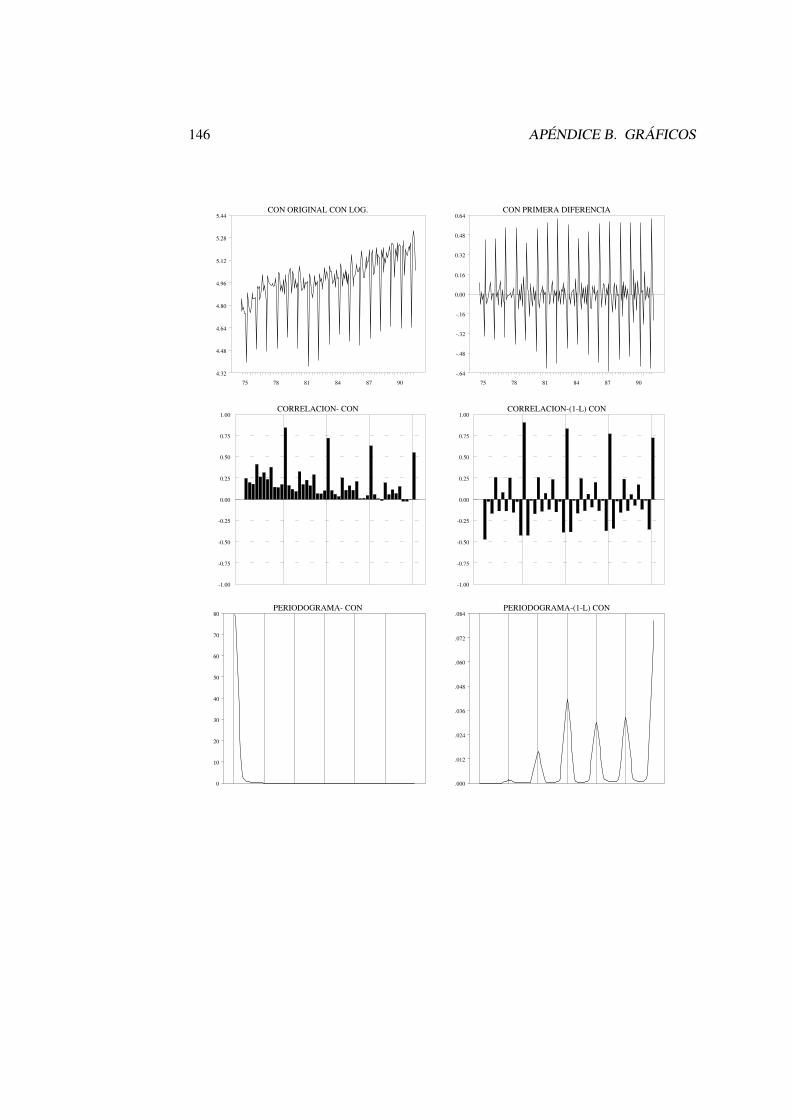
146 APENDICE B. GRAFICOS
CON ORIGINAL CON LOG.
75 78 81 84 87 90
4.32
4.48
4.64
4.80
4.96
5.12
5.28
5.44
CORRELACION- CON
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- CON
0
10
20
30
40
50
60
70
80
CON PRIMERA DIFERENCIA
75 78 81 84 87 90
-.64
-.48
-.32
-.16
0.00
0.16
0.32
0.48
0.64
CORRELACION-(1-L) CON
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) CON
.000
.012
.024
.036
.048
.060
.072
.084
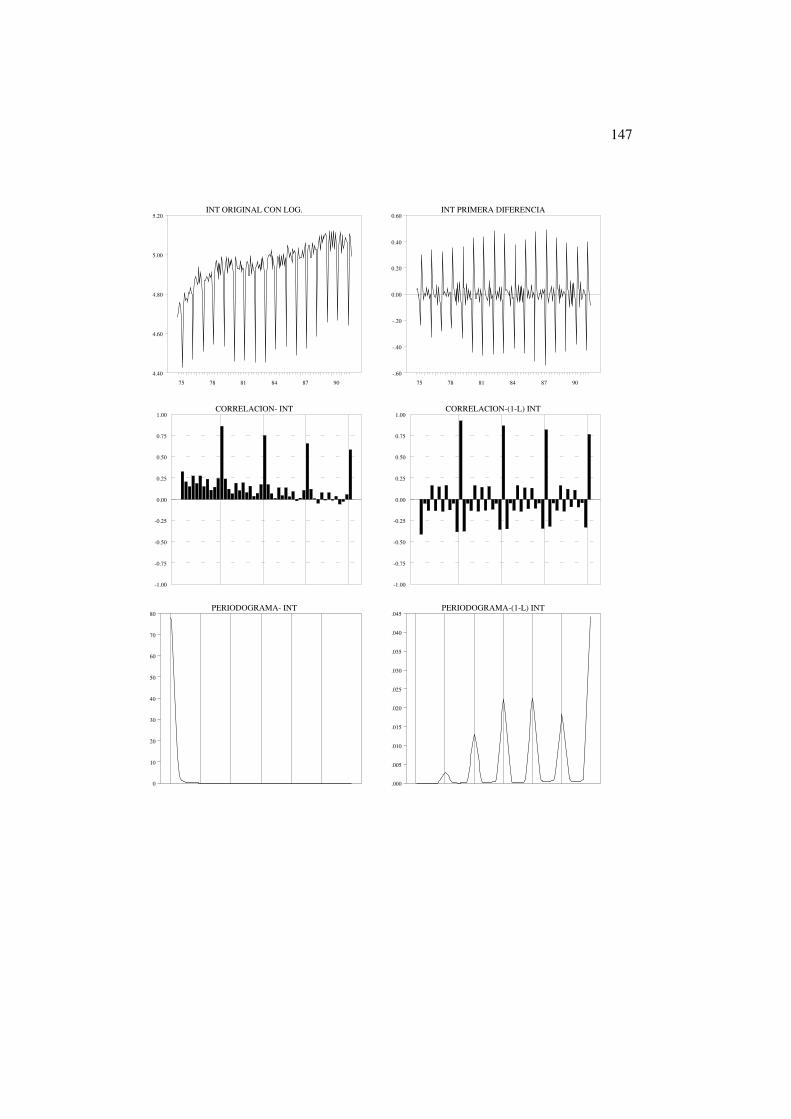
147
INT ORIGINAL CON LOG.
75 78 81 84 87 90
4.40
4.60
4.80
5.00
5.20
CORRELACION- INT
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- INT
0
10
20
30
40
50
60
70
80
INT PRIMERA DIFERENCIA
75 78 81 84 87 90
-.60
-.40
-.20
0.00
0.20
0.40
0.60
CORRELACION-(1-L) INT
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) INT
.000
.005
.010
.015
.020
.025
.030
.035
.040
.045
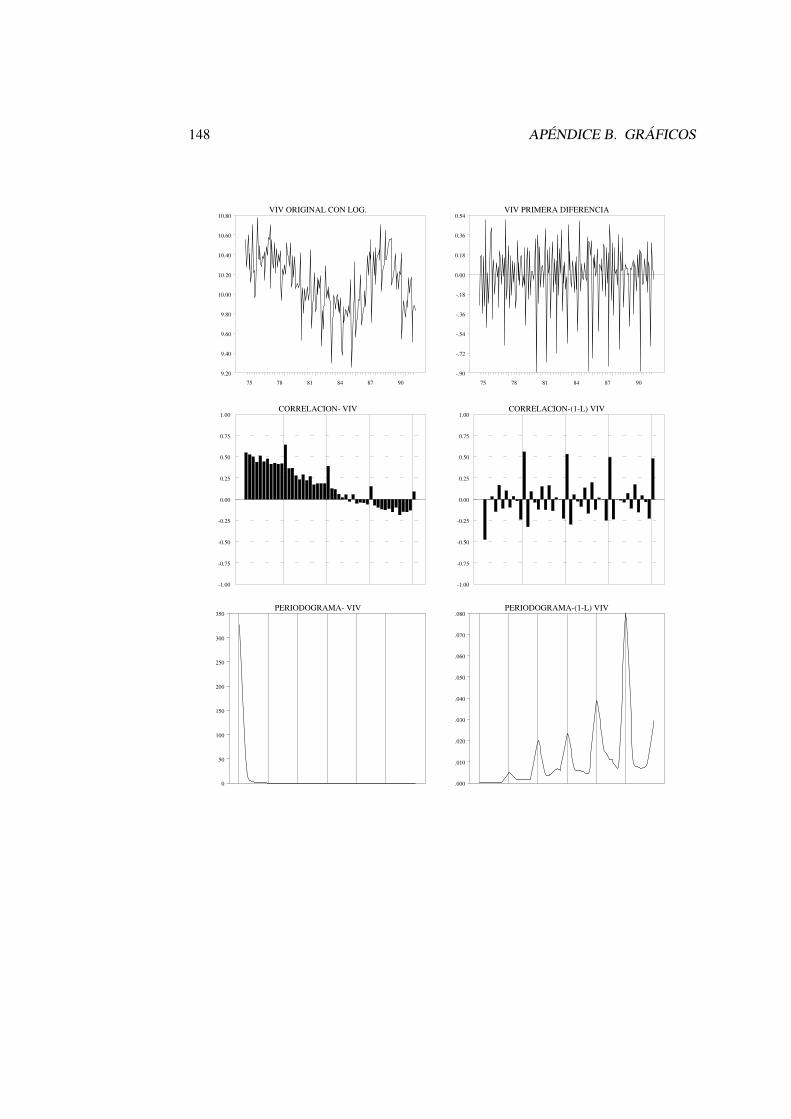
148 APENDICE B. GRAFICOS
VIV ORIGINAL CON LOG.
75 78 81 84 87 90
9.20
9.40
9.60
9.80
10.00
10.20
10.40
10.60
10.80
CORRELACION- VIV
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- VIV
0
50
100
150
200
250
300
350
VIV PRIMERA DIFERENCIA
75 78 81 84 87 90
-.90
-.72
-.54
-.36
-.18
0.00
0.18
0.36
0.54
CORRELACION-(1-L) VIV
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) VIV
.000
.010
.020
.030
.040
.050
.060
.070
.080
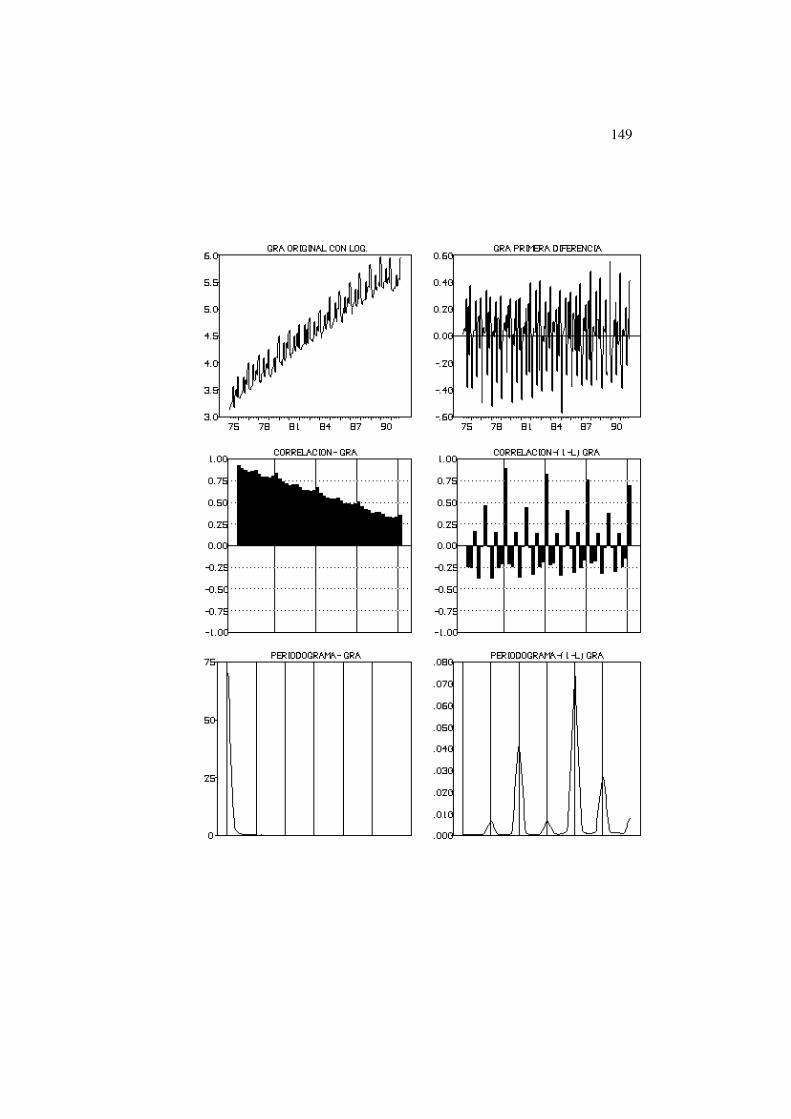
149
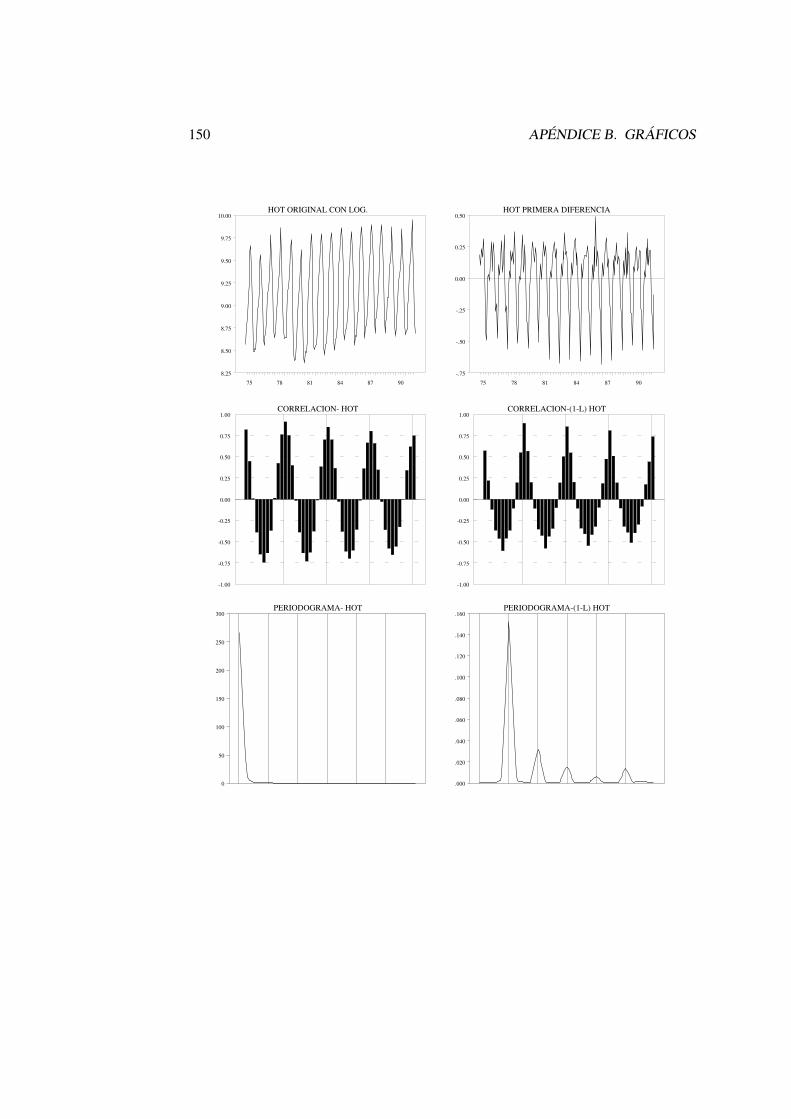
150 APENDICE B. GRAFICOS
HOT ORIGINAL CON LOG.
75 78 81 84 87 90
8.25
8.50
8.75
9.00
9.25
9.50
9.75
10.00
CORRELACION- HOT
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- HOT
0
50
100
150
200
250
300
HOT PRIMERA DIFERENCIA
75 78 81 84 87 90
-.75
-.50
-.25
0.00
0.25
0.50
CORRELACION-(1-L) HOT
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) HOT
.000
.020
.040
.060
.080
.100
.120
.140
.160
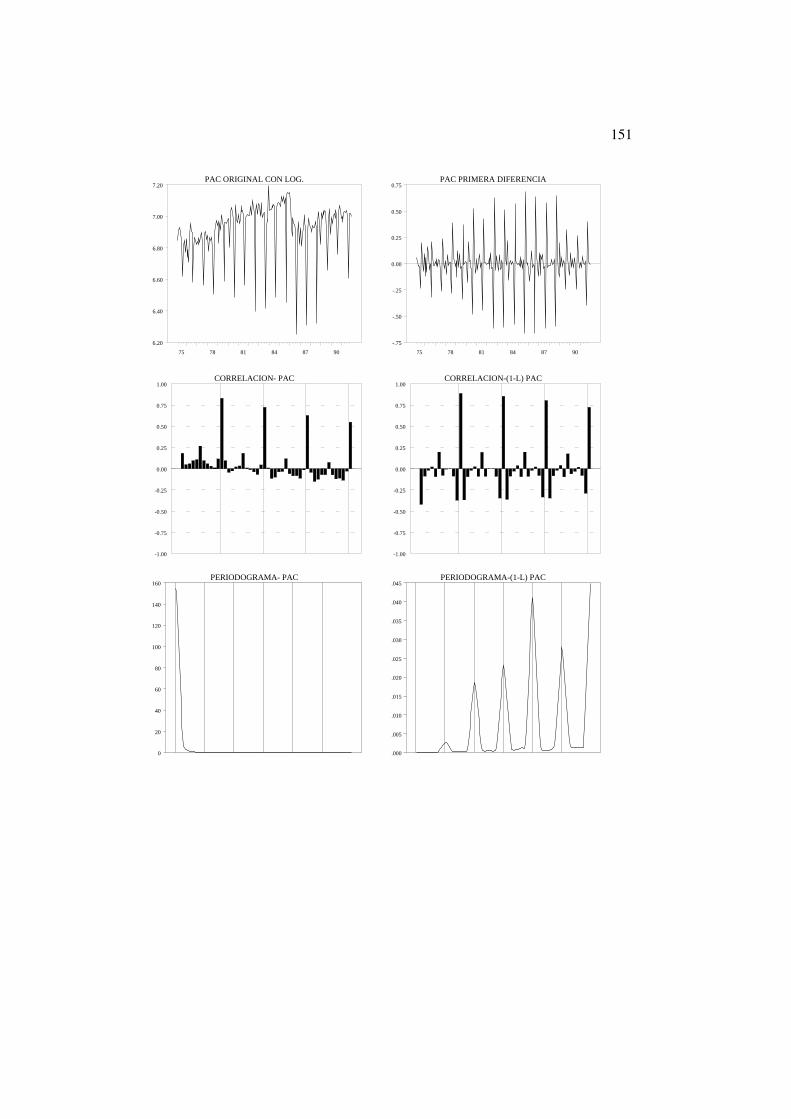
151
PAC ORIGINAL CON LOG.
75 78 81 84 87 90
6.20
6.40
6.60
6.80
7.00
7.20
CORRELACION- PAC
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- PAC
0
20
40
60
80
100
120
140
160
PAC PRIMERA DIFERENCIA
75 78 81 84 87 90
-.75
-.50
-.25
0.00
0.25
0.50
0.75
CORRELACION-(1-L) PAC
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) PAC
.000
.005
.010
.015
.020
.025
.030
.035
.040
.045
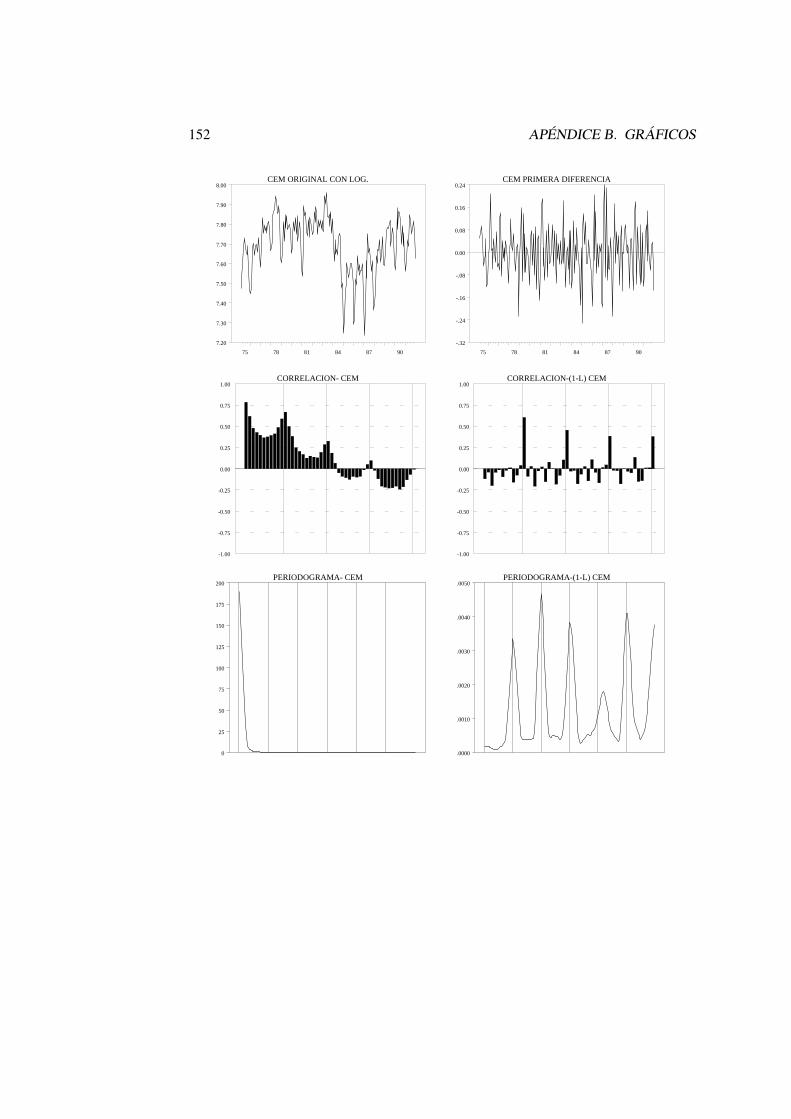
152 APENDICE B. GRAFICOS
CEM ORIGINAL CON LOG.
75 78 81 84 87 90
7.20
7.30
7.40
7.50
7.60
7.70
7.80
7.90
8.00
CORRELACION- CEM
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA- CEM
0
25
50
75
100
125
150
175
200
CEM PRIMERA DIFERENCIA
75 78 81 84 87 90
-.32
-.24
-.16
-.08
0.00
0.08
0.16
0.24
CORRELACION-(1-L) CEM
-1.00
-0.75
-0.50
-0.25
0.00
0.25
0.50
0.75
1.00
PERIODOGRAMA-(1-L) CEM
.0000
.0010
.0020
.0030
.0040
.0050
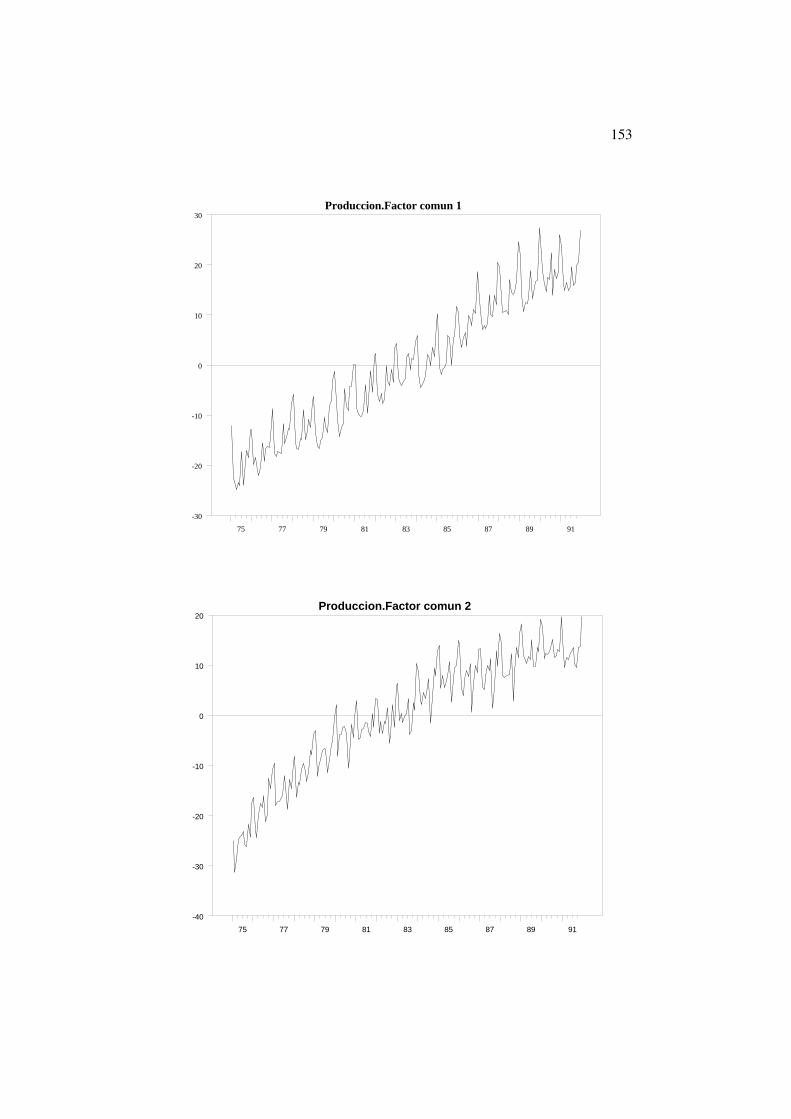
153
Produccion.Factor comun 1
75 77 79 81 83 85 87 89 91
-30
-20
-10
0
10
20
30
Produccion.Factor comun 2
75 77 79 81 83 85 87 89 91
-40
-30
-20
-10
0
10
20
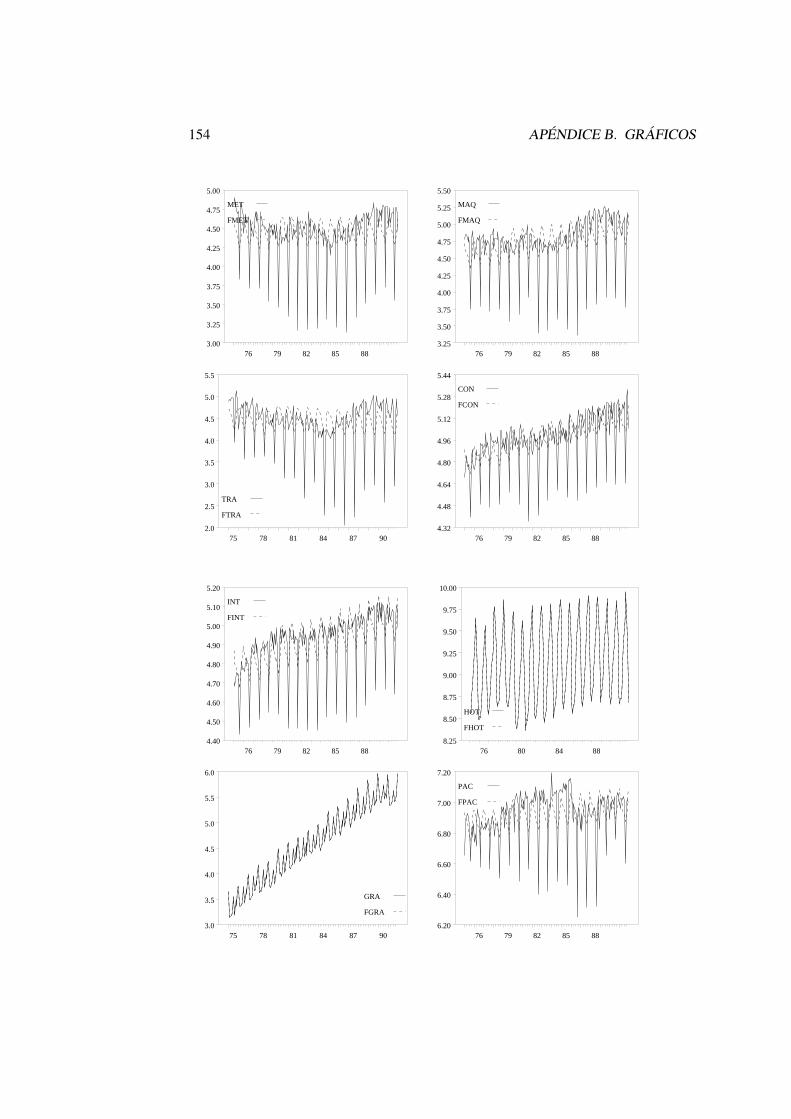
154 APENDICE B. GRAFICOS
76 79 82 85 883.00
3.25
3.50
3.75
4.00
4.25
4.50
4.75
5.00
MET
FMET
75 78 81 84 87 902.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
TRA
FTRA
76 79 82 85 883.25
3.50
3.75
4.00
4.25
4.50
4.75
5.00
5.25
5.50
MAQ
FMAQ
76 79 82 85 884.32
4.48
4.64
4.80
4.96
5.12
5.28
5.44
CON
FCON
76 79 82 85 884.40
4.50
4.60
4.70
4.80
4.90
5.00
5.10
5.20
INT
FINT
75 78 81 84 87 903.0
3.5
4.0
4.5
5.0
5.5
6.0
GRA
FGRA
76 80 84 888.25
8.50
8.75
9.00
9.25
9.50
9.75
10.00
HOT
FHOT
76 79 82 85 886.20
6.40
6.60
6.80
7.00
7.20
PAC
FPAC
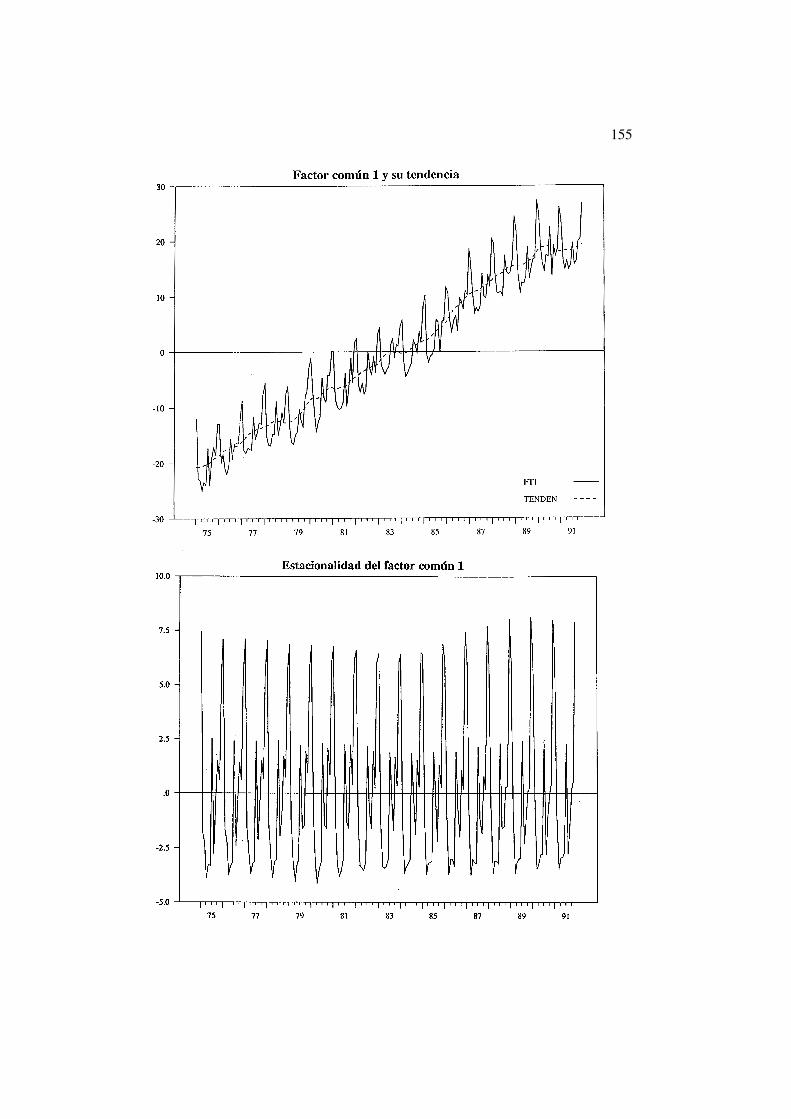
155
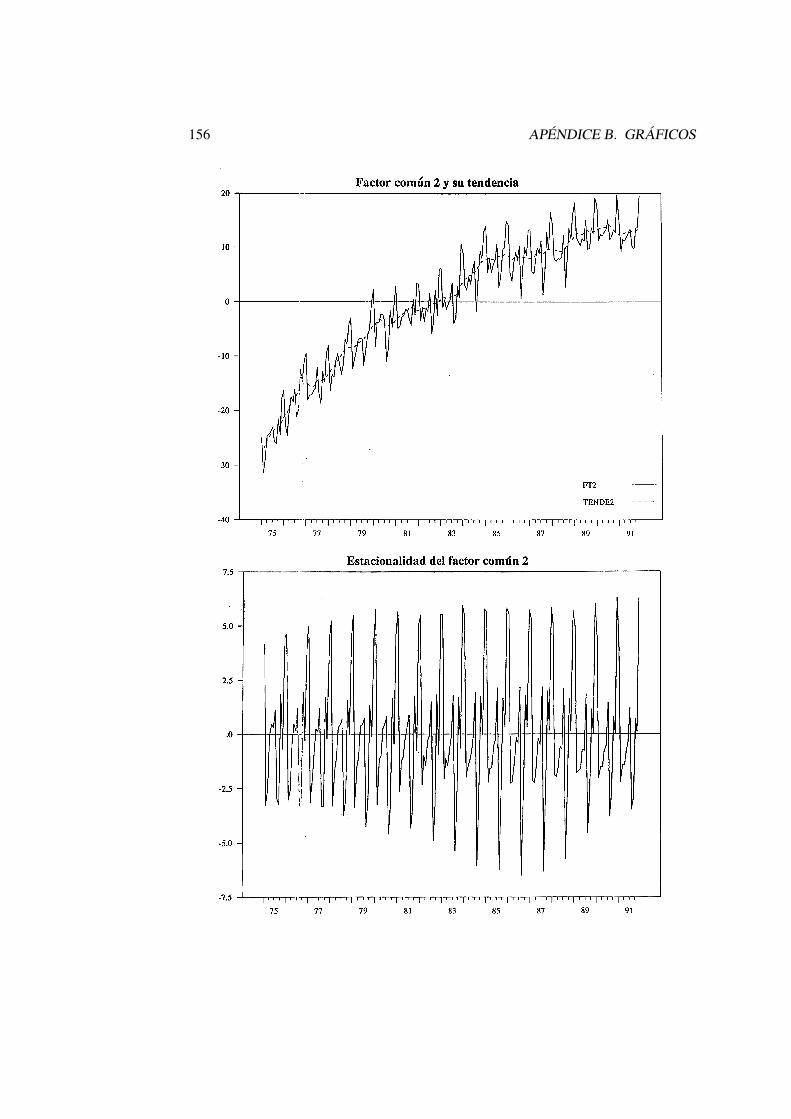
156 APENDICE B. GRAFICOS
Bibliografıa
Anderson, T. W. (1984). An Introduction to Multivariate Statistical Analysis. Wiley.New York.
Beaulieu, J. y Miron, J. (1993). “Seasonal unit roots in aggregate U.S. data.” Journal ofEconometrics, vol. 54, 305–28.
Bell, W. R. (1987). “A note on overdifferencing and the equivalence of seasonal timeseries models with monthly means and models with (0,1,1)12 seasonal parts whenθ = 1.” Journal of Business and Economics Statistics, vol. 5, 383–388.
Bhargava, A. (1986). “On the theory of testing for unit roots in observed time series.”Review of Economic Studies, vol. 53(3), 369–84.
Bhargava, A. (1990). “An econometric analysis of the US postwar GNP.” Journal ofPopulation Economics, vol. 3, 147–153.
Box, G. E. P. y Jenkins, G. (1970). Time Series Analysis: Forecasting and Control.Holden-Day. San Francisco.
Box, G. E. P. y Tiao, G. C. (1977). “A canonical analysis of multiple time series.”Biometrika, vol. 64, 355–365.
DGPC (1983). “Indicadores cıclicos: Elaboracion y aplicacion al analisis de la economıaespanola.” Informe tecnico, (Direccion General de Prevision y Coyuntura). Ministeriode Economıa y Hacienda.
Dickey, D. y Fuller, W. (1979). “Distribution of the estimators for autoregressive timeseries with a unit root.” Journal of the American Statistical Association, vol. 74,427–31.
Dickey, D., Hasza, D. y Fuller, W. (1984). “Testing for unit roots in seasonal time series.”Journal of American Statistical Association, vol. 79, 355–67.
Dolado, J. J. (1990). “Cointegracion: una panoramica.” Estadıstica Espanola, vol.132(124), 327–388.
Durbin, J. y Watson, G. S. (1950). “Testing for serial correlation in least squares regres-sion i.” Biometrika, vol. 37, 409–428.
157
158 BIBLIOGRAFIA
Engle, R. F. y Granger, C. W. J. (1987). “Cointegration and error correction: represen-tation, estimation and testing.” Econometrica, vol. 55, 251–276.
Engle, R. F., Granger, C. W. J. y Hallman, J. (1989). “Merging short and long-runforecasts: An application of seasonal cointegration to monthly electricity sales fore-casting.” Journal of Econometrics., vol. 40, 45–62.
Engle, R. F., Granger, C. W. J., Hylleberg, S. y Lee, H. S. (1993). “Seasonal Coin-tegration. The Japanese consumption function.” Journal of Econometrics, vol. 55,275–298.
Fernandez Macho, F. J. (1986). Estimation and Testing of Multivariate Time SeriesModel. Tesis Doctoral, London School of Economics.
Fernandez Macho, F. J. (1991). “Indicadores sinteticos de aceleraciones y desaceleracio-nes en la actividad economica.” Revista Espanola de Economıa, vol. 8(1), 125–156.
Fernandez Macho, F. J., Harvey, A. C. y Stock, J. H. (1987). “Forecasting and interpo-lation usin vector autorregressions with common trends.” Annales d’Economie et deStatistique, vol. 6/7, 279–287.
Franses, P. (1990). “Testing for seasonal unit roots in monthly data.” Inf. Tec. 9032,Econometric Institute.
Fuller, W. (1976). Introduction to Statistical Time Series. Jonh Wiley.
Gonzalo, J. y Granger, C. (1995). “Estimation of common long-memory components incointegrated systems.” Journal of Business and Economics Statistics, vol. 13, 17–35.
Gonzalo, J. y Granger, C. W. (1991). “Estimation of common long-memory compo-nents in cointegrated systems.” Discussion paper 91-33, University of California. SanDiego.
Granger, C. W. J. (1991). “Some recent generalizations of cointegration and the analysisof long-run relationships.” En R. F. Engle y C. W. J. Granger, eds., “Long-Run Eco-nomic Relationships. Readings in Cointegration,” pags. 277–287. Oxford UniversityPress, Oxford.
Hannan, E. J. (1970). Multiple Time Series. John Wiley, New York.
Harvey, A. (1981). Time Series Models. John Wiley.
Harvey, A. (1985). “Trends and cycles in macroeconomic time series.” Journal ofBusiness and Economic Statistics, vol. 3, 216–227.
Harvey, A. y Peters, S. (1990). “Estimation procedures for structural time series mo-dels.” Journal of Forecasting, vol. 9, 89–108.
Harvey, A. C. (1989). Forecasting,structural time series models and the Kalman filter.Cambridge University Press.
BIBLIOGRAFIA 159
Hasza, D. y Fuller, W. (1982). “Testing for nonstationary parameter specifications inseasonal time series models.” The Annals of Statistics, vol. 10, 1209–1216.
Hylleberg, S., Engle, R. F., Granger, C. W. J. y Yoo, B. S. (1990). “Seasonal integrationand cointegration.” Journal of Econometrics, vol. 44, 215–38.
Johansen, S. (1988). “Statistical analysis of cointegration vectors.” Journal of EconomicDynamics and Control, vol. 12, 231–254.
King, R. G., Plosser, C. I., Stock, J. H. y Watson, M. W. (1987). “Sto-chastic Trends and Economic Fluctuations.” NBER Working Pa-pers 2229, National Bureau of Economic Research, Inc. URLhttp://ideas.repec.org/p/nbr/nberwo/2229.html.
Lee, H. (1992). “Maximum likelihood inference on cointegration and seasonal cointe-gration.” Journal of Econometrics, vol. 54, 1–47.
Lutkepohl, H. (1987). Forecasting aggregated vector ARMA processes. Springer-Verlag,Berlin.
Maravall, A. (1992). “Stochastic linear trends: Models and estimators.” Working paper,European University Institute. URL http://hdl.handle.net/1814/428.
Melis, F. (1982). “Indicadores cıclicos y tasas de variacion interanual.” estadısticaEspanola, vol. 95, 7–28.
Nerlove, M., Grether, D. y Carvalho, J. (1979). Analisis of Economic Time Series. Aca-demic Press, New York.
Osborn, D. R., Chui, A., Smith, J. P. y Birchenhall, C. (1988). “Seasonality and theorder of integration for consumption.” Oxford Bulletin of Economics and Statistics,vol. 50(4), 361–377.
Osterwald-Lenum, M. (1992). “A note with quantiles of the asymptotic distribution ofthe maximum likelihood cointegration rank test statistics.” Oxford Bulletin of Econo-mics and Statistics, vol. 54(3), 461–471.
Phillips, P. (1987). “Time series regression with unit root.” Econometrica, vol. 55(2),277–301.
Rao, C. R. y Mitra, S. K. (1971). Generalized Inverse of Matrices and its Applications.John Wiley and Sons, New York.
Raveh, A. (1989). “Analyzing parallelism of trendy time series.” Mimeo, The HebrewUniversity of Jerusalem.
Sargan, J. D. y Bhargava, A. (1983). “Testing residuals from least squares regression forbeing generated by the gaussian random walk.” Econometrica, vol. 51, 153–174.

160 BIBLIOGRAFIA
Stock, J. y Watson, M. (1988). “Testing for common trends.” Journal of the AmericanStatistical Association, vol. 83, 1097–1107.
Theil, H. y Wage, S. (1964). “Some observations on adaptive forecasting.” ManagmentScience, vol. 10, 198–206.
Uriel, E. (1985). Analisis de Series Temporales: Modelos ARIMA. Editorial Paraninfo.