algebra lineal
DESCRIPTION
Ejemplos de algebra linealTRANSCRIPT
Algebra linealSistema de ecuaciones lineales resueltas por Gauss – Jordan
Expositor: Ing. Jorge Edgar Clausen Sevilla

Algebra lineal. Objetivo General.Resolver problemas de aplicación e interpretar las soluciones utilizando matrices y sistemas de ecuaciones lineales para las diferentes áreas de la ingeniería.
Identificar las propiedades de los espacios vectoriales y las transformaciones lineales para describirlos, resolver problemas y vincularlos con otras ramas de las matemáticas.
Algebra lineal. Competencia específica a desarrollar..Modelar y resolver diferentes problemas de aplicaciones de sistemas de ecuaciones lineales en el área de las matemáticas y de la ingeniería por los métodos de Gauss, Gauss-Jordan, matriz inversa y regla de Cramer.
Sistema de ecuaciones lineales. Definición.Se le llama línea recta al lugar geométrico de los puntos tales que tomados dos puntos diferentes cualesquiera P1 (x1, y1) y P2 (x2, y2) del lugar, el valor de la pendiente m calculado por medio de la fórmula de la pendiente (m) resulta siempre constante. Lo que lleva a obtener una ecuación de tipo lineal.
Un sistema de ecuaciones lineales es donde intervienen dos o mas ecuaciones lineales con dos o mas incógnitas dependiendo del sistema de ecuaciones y el objetivo en encontrar los valores de las incógnitas que satisfagan dichas ecuaciones.
La teoría de ecuaciones lineales juega un importante papel en algebra lineal. De hecho, muchos problemas de algebra lineal son equivalentes a estudiar por ecuaciones lineales, unos ejemplos son la obtención de las corrientes eléctricas en un circuito con mallas y en investigación de operaciones para los cálculos de la tabla simplex.

Sistema de ecuaciones lineales. Método de Gauss-Jordan. El método de Gauss-Jordan es una variante del método de Gauss. Cuando se elimina una incógnita en una ecuación, Gauss-Jordan elimina esa incógnita en el resto de las ecuaciones, tomando como base para la eliminación a la ecuación pivote. También todos los renglones se normalizan cuando se toman como ecuación pivote. El resultado final de este tipo de eliminación genera una matriz identidad en vez de una triangular como lo hace Gauss, por lo que no se usa la sustitución hacia atrás.
Un problema en que se puede resolver por el método de Gauss-Jordan es el siguiente sistema de ecuaciones lineales con tres incógnitas:
Ec. 1
Ec. 2
Ec. 3
Sistema de ecuaciones lineales. Método de Gauss-Jordan. Solución.
El sistema se expresa como una matriz aumentada
Se determina la ecuación pivote que corresponde a la primera ecuación del sistema de ecuaciones. El elemento pivote será aquella incógnita a eliminar de las ecuaciones restantes, en este caso x1.
Se normaliza la ecuación 1 dividiendo todos los elementos de la ecuación 1 por el primer coeficiente de la primera incógnita, en este caso, el 3. Por lo que
Lo que nos lleva a formar la siguiente matriz

Sistema de ecuaciones lineales. Método de Gauss-Jordan. Solución.
Para obtener la nueva Ecuación 2 (Ec.2) hacemos la siguiente operación
Y para obtener la nueva Ecuación 3 (Ec.3) hacemos la siguiente operación
El sistema resultante queda de la siguiente forma
La nueva ecuación pivote es la Ec.2 y el nuevo elemento pivote a eliminar es x2. Se normaliza la ecuación 2 dividiendo todos los elementos de la ecuación 2 por el coeficiente de la segunda incógnita, en este caso, el 7.00333. Por lo que
Lo que nos lleva a formar la siguiente matriz
Sistema de ecuaciones lineales. Método de Gauss-Jordan. Solución.
Para obtener la nueva Ecuación 1 (Ec.1) hacemos la siguiente operación
Y para obtener la nueva Ecuación 3 (Ec.3) hacemos la siguiente operación
El sistema resultante queda de la siguiente forma
La nueva ecuación pivote es la Ec.3 y el nuevo elemento pivote a eliminar es x3. Se normaliza la ecuación 3 dividiendo todos los elementos de la ecuación 3 por el coeficiente de la tercera incógnita, en este caso, el 10.01200. Por lo que
Lo que nos lleva a formar la siguiente matriz
Sistema de ecuaciones lineales. Método de Gauss-Jordan. Solución.
Para obtener la nueva Ecuación 1 (Ec.1) hacemos la siguiente operación
Y para obtener la nueva Ecuación 2 (Ec.2) hacemos la siguiente operación
El sistema resultante queda de la siguiente forma
Por lo que, de acuerdo al resultado, los valores de las incógnitas son:
Sistema de ecuaciones lineales. Método de Gauss-Jordan. Comprobación.Actualmente hay calculadoras científicas que nos permiten obtener el valor de las incógnitas de un sistema de ecuaciones lineales, mas sin embargo están limitadas solo hasta el calculo de tres incógnitas. Uno de los modelos que recomiendo para el calculo de las mismas es el modelo fx-991MS de CASIO.
Los pasos a seguir para resolverlo por medio de esta calculadora serían los siguientes. Primero identificamos los coeficientes de las ecuaciones y los comparamos con los coeficientes que interpretará la calculadora, es decir
Ecuaciones originales Ecuaciones interpretadas por la calculadora

Sistema de ecuaciones lineales. Método de Gauss-Jordan. Comprobación.Por lo tanto, los coeficientes a usar serían
El siguiente paso es ir introduciendo los valores de los coeficientes para que la calculadora muestre el resultado. Para ello entramos al menú de las ecuaciones de la siguiente maneraQue corresponde en el menú a ecuaciones simultaneas con 3 incógnitas. Para introducir los datos solo hay que teclear el número seguido del igual (=) para así poder seguir capturando los siguientes coeficientes. Se capturarán de la siguiente maneraAl finalizar mostrará el valor de la x, que correspondería en nuestra ecuación a la x1. Para que muestre los demás valores solo hay que usar la flecha hacía abajo del botón de REPLAY para que los muestre.
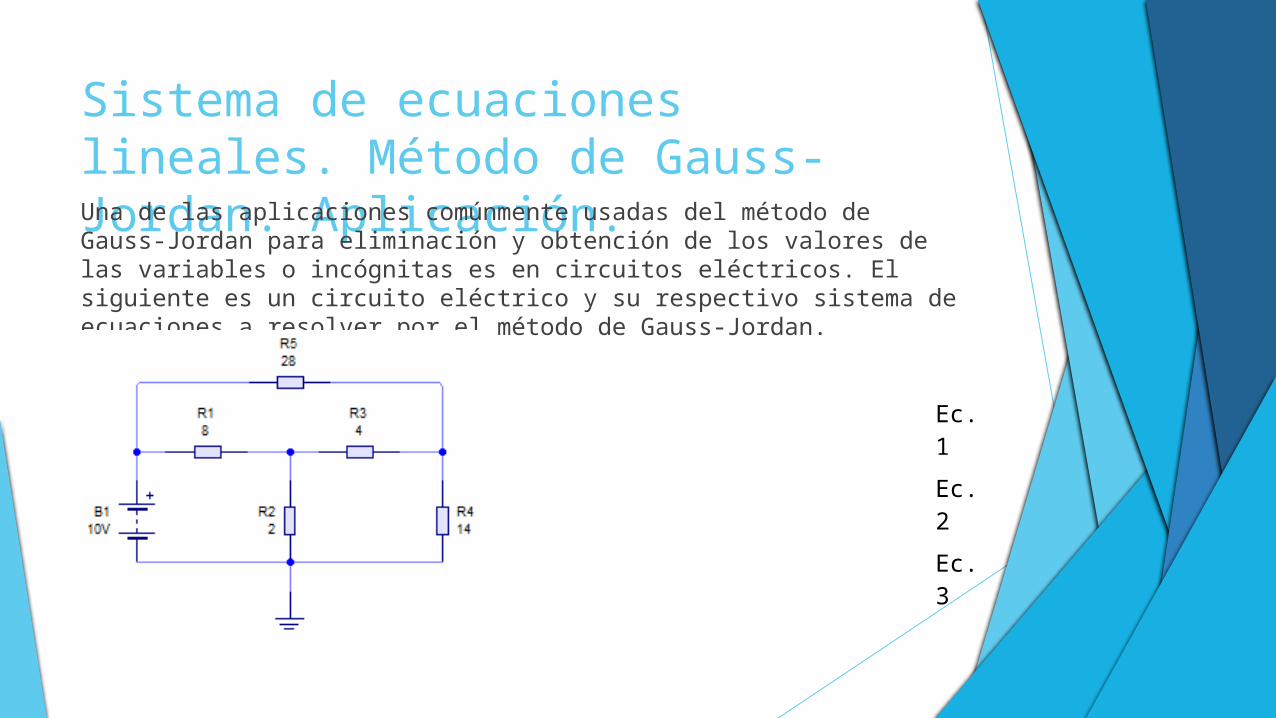
Sistema de ecuaciones lineales. Método de Gauss-Jordan. Aplicación.Una de las aplicaciones comúnmente usadas del método de Gauss-Jordan para eliminación y obtención de los valores de las variables o incógnitas es en circuitos eléctricos. El siguiente es un circuito eléctrico y su respectivo sistema de ecuaciones a resolver por el método de Gauss-Jordan.
Ec. 1
Ec. 2
Ec. 3

Sistema de ecuaciones lineales. Método de Gauss-Jordan. Aplicación.Ponemos los coeficientes en forma de matriz aumentada y pasamos a resolverlo por el método de Gauss-Jordan.
[ 10 −2 −8−2 20 −4−8 −4 40|
1000 ]𝑅1
𝑅2
𝑅3[ 10 −2 −8−2 20 −4−8 −4 40|
1000 ] 1 /10𝑅1
1/−2𝑅2
1/−8 𝑅3[ 1 −0.2 −0.81 −10 21 0.5 −5 |100 ]𝑅2−𝑅1
𝑅3−𝑅1
[ 1 −0.2 −0.80 −9.8 2.80 0.7 −4.2|
1−1−1]1/−9.8𝑅2
1/ 0.7𝑅3 [ 1 −0.2 −0.80 1 −0.2850 1 −6 | 1
0.102−1.428]𝑅1+0.2𝑅2
¿𝑅3−𝑅2
[ 1 0 −0.8570 1 −0.2850 0 −5.715|
1.0200.102−1.53 ]1/−5.715𝑅3[ 1 0 −0.857
0 1 −0.2850 0 1 |1.0200.102
0.267 ]𝑅1+0.857𝑅3
𝑅2+0.285𝑅3
¿
[ 1 0 00 1 00 0 1|
1.2480.1780.267] Por lo tanto, los valores de las corrientes generales
que circulan por el circuito sonI1 = 1.248 A. I2 = 0.178 A. I3 = 0.267 A.

Sistema de ecuaciones lineales. Método de Gauss-Jordan. Otra aplicación.Otra aplicación del método de Gauss-Jordan es para obtener el resultado optimo de un problema de programación lineal. Uno de ellos es el método simplex.
Por ejemplo
Sujeto a las siguientes restricciones
Con condición de no negatividad (C.N.N.). El primer paso es convertir al modelo estándar, esto es, convertir las restricciones que son las inecuaciones a igualdades agregando en cada restricción una variable de holgura que vendrían a ser S1, S2 y S3 respectivamente por cada restricción. Quedando de la siguiente manera
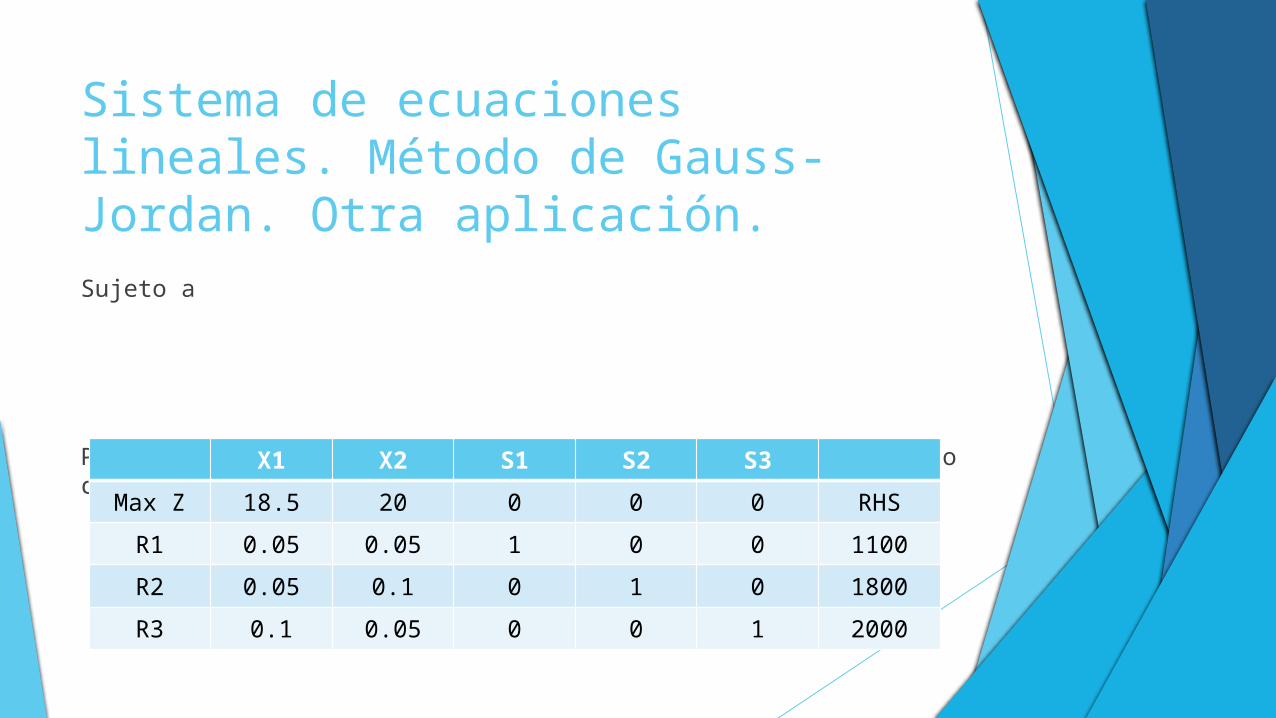
Sistema de ecuaciones lineales. Método de Gauss-Jordan. Otra aplicación.Sujeto a
Posteriormente se pasa a una tabla simplex para interpretarlo como una matriz
X1 X2 S1 S2 S3
Max Z 18.5 20 0 0 0 RHS
R1 0.05 0.05 1 0 0 1100
R2 0.05 0.1 0 1 0 1800
R3 0.1 0.05 0 0 1 2000

Sistema de ecuaciones lineales. Método de Gauss-Jordan. Otra aplicación.Dónde X1, X2 son las variables de decisión, S1, S2 y S3 las variables de Holgura. R1, R2 y R3 son las restricciones y RHS son las disponibilidades de las restricciones. Posteriormente se definen las variables que entran y las que salen, agregando para las variables que entras dos filas, la fila Z y la fila Cj-Zj. Por lo que la tabla simplex queda reescrita de la siguiente manera
En esta sección es donde el método de solución por Gauss-Jordan juega un papel importante ya que una vez que están definidas las variables que entran y salen, la intersección de ellas nos define la celda pivote. Por lo que se empieza a aplicar el método de Gauss-Jordan hasta llegar a un resultado óptimo.
Coef Base 18.5 20 0 0 0 RHS Theta
0 S1 0.05 0.05 1 0 0 1100 22000
0 S2 0.05 0.1 0 1 0 1800 18000
Sale
0 S3 0.1 0.05 0 0 1 2000 40000
Z 0 0 0 0 0 0
Cj-Zj 18.5 20 0 0 0
Entra
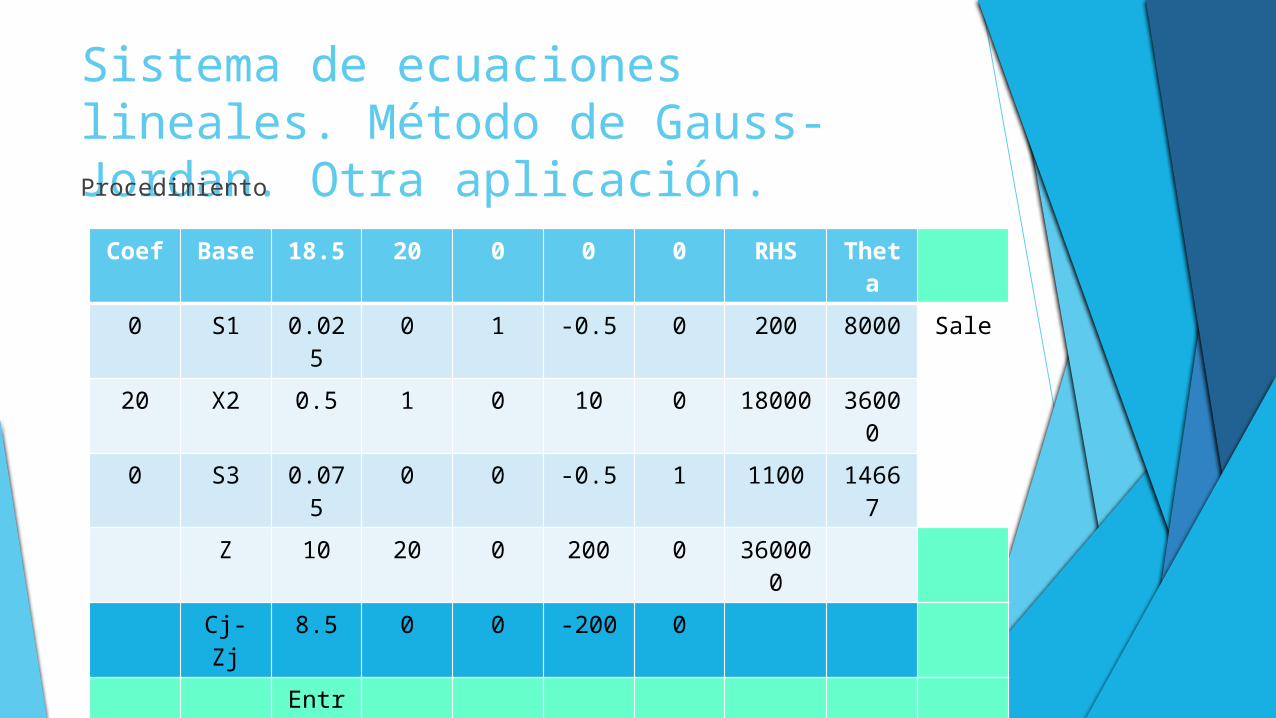
Sistema de ecuaciones lineales. Método de Gauss-Jordan. Otra aplicación.Procedimiento
Coef Base 18.5 20 0 0 0 RHS Theta
0 S1 0.025 0 1 -0.5 0 200 8000 Sale
20 X2 0.5 1 0 10 0 18000 36000
0 S3 0.075 0 0 -0.5 1 1100 14667
Z 10 20 0 200 0 360000
Cj-Zj 8.5 0 0 -200 0
Entra

Sistema de ecuaciones lineales. Método de Gauss-Jordan. Otra aplicación.Resultado final
Se sabe cuando se llega al resultado óptimo cuando al evaluar, si hay una variable que entrando mejore el resultado, es decir que la fila Cj-Zj tenga algún valor positivo, aún será posible mejorar la solución, si no hay ningún valor mayor que cero, significa entonces que se a llegado al óptimo.
Coef Base 18.5 20 0 0 0 RHS Theta
19 X1 1 0 40 -20 0 8000
20 X2 0 1 -20 20 0 14000
0 S3 0 0 -3 1 1 500
Z 18.5 20 340 30 0 428000
Cj-Zj 0 0 -340 -30 0

BibliografíaPara el aprendizaje de las matrices
Algebra Lineal. 6ta. Edición. Stanley I. Grossman
Advanced Engineering Mathematics. Tenth Edition. Erwin Kreyszig
Para circuitos eléctricos
Electrical Engineering. Principles and Applications. Fifth Edition. Steven Hambley
Para el método simplex
Métodos numéricos para ingenieros. 6ta. Edición. Steven G. Chapra