actualidades de telemedicina y - cenetec.salud.gob.mx€¦ · logrado optimizar la operación del...
TRANSCRIPT


Actualidades de Telemedicina y
Robótica en el Estado de México
Secretaría de Salud del Estado de México – Septiembre 2014
Dra. María Elena Álvarez Lobato

El Estado de México comparte, junto con muchos otros, la
insuficiencia de médicos especialistas, la escasez de
recursos, el aumento de la demanda de servicios y la
centralización de éstos. Además se agrega la extensión
territorial, las dificultades geográficas, las de comunicación,
así como el grado de marginación de la población.
Es por ello que no se garantiza del todo el acceso universal
al servicio médico especializado, o que éste sea otorgado de
forma eficaz y eficiente.
También existe un inapropiado uso de los hospitales debido
a que los pacientes no son canalizados a los niveles acorde a
la complejidad de su patología, generándose una
sobredemanda en las unidades médicas de segundo y tercer
nivel y una subutilización del primer nivel de atención.
Situación actual

General
•Extensión territorial
•Situación geográfica complicada
•Marginación de la población
•Barreras de Comunicación
Largos tiempos de Espera
Atención poco personalizada
Costos elevados por
desplazamiento
Salud
•Falta de Especialistas Médicos
•Falta de Recursos materiales
•Desintegración del Sistema de Salud
•Centralización de Servicios
Retos
Consecuencias

Retos y Avances

DF
Tenancingo
43,973
Valle de Bravo
21,259
Atlacomulco
30,203
Tejupilco
17,910
Central de Control
Toluca
Hospital Nicolás
San Juan Toluca
266,231
Hueypoxtla
26,927
Los Reyes la Paz
121,372
Chalco
162,184
Texcoco
116,534
Población potencialmente
beneficiada
762, 620 personas
Telepresencia
Zumpango

Telepresencia / robótica
RP-VITA RP7-i
RP-Xpress
Da Vinci

El programa dio inicio en agosto del 2009 en cinco
hospitales suburbanos de 60 camas.
Objetivo:
Compensar la carencia de médicos intensivistas en
ciudades distantes a la capital proporcionando asistencia
especializada en áreas críticas en donde no hay médicos
especialistas 24/7.
Cada hospital cuenta con:
Un robot RP7i (Intouch Health)
Red inalámbrica para internet y equipo técnico de
soporte
Central de monitoreo en el Hospital Materno
Perinatal “Mónica Pretelini” en Toluca
Robótica

Telepresencia / robótica
El Robot RP7 es móvil y controlado remotamente por el médico
que se encuentra en la estación de trabajo utilizando la
computadora, se puede maniobrar a éste hasta la misma cama
del paciente y mantener una comunicación en tiempo real.
Tiene un diseño antropométrico, pesa 90 kgs y sus medidas
son: 1.63 mts. de altura y 90 cms. de ancho.
Tiene cabeza y cuerpo cilíndrico montado sobre un marco móvil
que es capaz de desplazarse de lado a lado y mover la cabeza
hacia la cara de las personas, cuenta con sensores y
parachoques basado en sensores de proximidad y de contacto
que le permiten desplazarse libremente por las áreas del
hospital, una video cámara de 5 megapixeles y enfoque remoto
para ser utilizado en las áreas de terapia intensiva, urgencias,
quirófano y estar en los sitios donde se requiera de la atención
especializada.

2ª. EtapaTelepresencia / robótica
En el mes de agosto del 2012 se amplió este programa
hacia el Valle de México con 5 robots más, para potenciar su
alcance ligándolo con el programa de telemedicina.
Las unidades médicas integradas al Programa son:
Hospital Materno Infantil “Josefa Ortiz de Domínguez
Bicentenario” de Chalco
Hospital Materno Infantil “Miguel Hidalgo y Costilla” Los
Reyes La Paz
Hospital General de Texcoco “Guadalupe Victoria
Bicentenario”
Hospital General Hueypoxtla “Hermenegildo Galeana
Bicentenario”
Hospital Regional de Alta Especialidad “José Ma. Morelos y
Pavón” de Zumpango (Área de Quemados)

Telepresencia / robótica
Quirófano en
Atlacomulco
En las áreas críticas puede mantenerse las 24 horas del
día los siete días a la semana.
Disminuye las diferencias en atención entre los
miembros del equipo.
Conecta a servicios de especialidades de hospitales de
tercer nivel.
Incrementa la educación.
Disminuye el síndrome de agotamiento.
Mejorar la seguridad general en la atención por
la creación de bases de datos, listas de
chequeo, de la toma de decisiones e
intervenciones.

Telepresencia en el Estado de México

5 robots de la primera fase realizaron 8,477 visitas en 2012
7 visitas por paciente, en promedio durante su estancia
Telepresencia 1ª. etapa
30%
5%
1%
17% 8% 0%
4%
35%
Procesos de Atención
ACLS ATLS Intoxicación C.Mater
Neurovascular Quemaduras RespRAP UCI

Telepresencia 1ª. etapa

Telepresencia 1er. Semestre 2014 Amarillo 7%
Rojo 90%
Verde 3%
TRIAGE Amarillo Rojo Verde
34 445 14
0
50
100
150
200
Proceso de Atención
ACLS ATLS Intoxicación Mater Neuro Vascular Quemadura Respuesta
Rápida UCI
57 20 24 118 64 14 0 196

Telepresencia Situación Actual
10%
45%
7% 1%
8% 0%
2%
9%
12%
6% Pacientes Por Unidad
Hospitalaria
Atlacomulco
Tejupilco
Tenancingo
Texcoco
Valle de Bravo
Nicolás San Juan
HRAEZ
Hueypoxtla
Chalco
Reyes
14% 8%
8% 0% 70%
Estatus del Paciente Alta del Hospital
Muerte
Traslado a OtroHospital
Error de Proceso
Paciente enSeguimiento

PROCESO DE ATENCIÓN
UNIDADES MEDICAS Primer Semestre 2014
Atlacomulco Tejupilco Tenancingo Texcoco Valle de
Bravo Nicolás
San Juan HRAEZ Hueypoxtla Chalco Reyes HMPMP TOTAL
ACLS 6 160 24 2 26 0 1 15 9 2 0 245
ATLS 18 91 4 1 22 0 0 0 0 1 0 137
Intoxicación 0 49 23 1 0 0 0 0 15 2 0 90
Mater 19 118 24 11 14 0 0 2 285 79 3 555
Neuro Vascular
85 175 13 0 38 0 0 16 0 10 0 337
Quemadura 4 0 0 0 5 0 231 0 0 0 0 240
Respuesta Rápida
0 1 0 0 1 0 0 0 0 0 0 2
UCI 10 926 140 11 233 0 8 186 6 4 0 1524
Solicitud de Pacientes 15 1 19 29 0 3 30 4 6 20 0 127
TOTAL 157 1521 247 55 339 3 270 223 321 118 3 3257

RP VITA (Remote Presence Virtual Independent Telemedicine
Assistance)
El RP VITA es el primer robot autónomo médico aprobado por la
FDA
Además de permitir al médico capturar y recibir datos clínicos en
tiempo real, la primera y más importante característica de
tecnología del RP-Vita es el "AutoDrive."
El Autodrive evita chocar contra los objetos y personas a través
de su uso del láser, el sonar y sensores. El robot de tamaño
humano es un dispositivo de 5 pies y 6 pulgadas, y su "cara" es
una pantalla.
Esencialmente, el RP VITA es capaz de construir un mapa del
hospital, lo cual lo hace diferente a cualquier otro robot médico
existente. La ventaja primordial es que el médico se concentra en
el paciente y no en la tecnología.
Además, las nuevas características RP-VITA contienen una
interfaz sencilla para usar iPad para la navegación y la
interacción con el paciente y el equipo médico.
Características RP VITA
Este robot ofrece a los médicos la capacidad de tomar el control
de cualquier proceso (gestión clínica o atención remota). Se
proporciona un nuevo nivel de movilidad, utilidad y facilidad de
uso para los profesionales de la salud.
Proporciona acceso en tiempo real a los datos clínicos. Por
ejemplo, RP-VITA puede obtener los datos del paciente en vivo
desde el registro médico electrónico y está equipado con la
capacidad de conectarse con dispositivos de diagnóstico tales
como otoscopios y ultrasonido.
Viene equipado con estetoscopio electrónico.
RP-VITA examina el lugar y realiza un mapeo del recinto. Para
ello dispone de 3 herramientas:
- Un láser, con un radio de acción de 270 grados.
- Un sónar que esa zona de 90 grados que no cubre el láser.
- Un sistema de visión 3D de Microsoft, con cámaras que ven
arriba, abajo y al frente, evitando caídas por las escaleras y
obstáculos.

RP Vita En el 2013 el Hospital Regional de Alta
Especialidad de Zumpango contó con el primer
RP-VITA en México y a nivel internacional fuera
de USA, siendo trasladado a la UCIN del
Hospital Materno Infantil de Chalco por la
necesidad de subsanar la falta de médicos
neonatólogos

Telepresencia /
robótica
Mar-2013
Abri-2013
May-2013
May-2013
Feb-2013


A partir de su implementación en el 2010 se
ha podido beneficiar a un mayor número de
personas y fomentar una mejor
comunicación entre los diferentes niveles de
atención, así como de las diversas unidades
médicas que se encuentran a lo largo y
ancho de la entidad, de tal forma que se ha
logrado optimizar la operación del Sistema
de Referencia y Contrareferencia del Estado.
Nos ha permitido brindar una atención
oportuna sin la necesidad de que los
pacientes se trasladen a lugares distantes,
disminuyendo las listas de espera para
consultar a los especialistas.
Telemedicina

Encargado de coordinar los servicios de Telemedicina del Valle de México y
Valle de Toluca, verificar agendas, seguimiento, almacenamiento, elaboración
de estadísticas, reporteo y evaluación de la información. Puede constituirse
como un centro referente al cual podrán tener acceso los hospitales
participantes en la red de telemedicina, de tal forma que se favorezca el que
cada una de las unidades médicas sean más resolutivas.
Este centro esta ubicado en la Coordinación de Hospitales de Alta
Especialidad, de la Secretaria de Salud del Estado de México.
Centro Receptor de Telemedicina

10 Centrales Consultantes atendidas por
especialistas y subespecialistas quienes ofrecen
interconsulta, segunda opinión, opinión experta y
resolución de controversias a unidades de menor
complejidad
En estas centrales consultantes los médicos
especialistas pueden ofrecer apoyo a los diversos
centros referentes de la zona, pero a su vez
tienen la posibilidad de solicitar apoyo al centro
receptor, en caso necesario.
Consultorios y Equipamiento de Alta Especialidad

Seis centros referentes, o consultorios con
equipamiento de 2° nivel ocupados por
especialistas y subespecialistas quienes
ofrecen interconsulta, segunda opinión y
opinión experta en la mayoría de los casos
que se presentan en teleconsultorios de
menor complejidad, pero también solicitan
apoyo a los consultorios de alta especialidad.
Además de tener equipo de videoconferencia,
cuentan con equipo médico como ultrasonido,
electrocardiograma de 12 canales, fuente de
luz y estetoscopio electrónico.
Teleconsultorios y Equipamiento de Teleconsultorio de 2° Nivel

Siete centros referentes ubicados en
unidades médicas de menor complejidad y
que cuentan con equipo de diagnóstico
básico. Estos consultorios se encuentran
ocupados por personal que requiere
interconsulta, apoyo experto o que carecen
de alguna especialidad que puede ser
consultada a través de telemedicina
Cuentan con equipo similar al
teleconsultorio de 2° nivel, solo que
carecen de ultrasonido y su
electrocardiograma es de 3 canales.
Teleconsultorios y Equipamiento Periférico

Ultrasonido Fuente de Luz
Estetoscopio electrónico
Hardware y software Telemedicina
Dasiclinic
Equipo de
Video
conferencia
Electro
cardiograma

Dasiclinic

Dasiclinic

Telemedicina
Telenseñanza
1er. Foro Estatal Interinstitucional para la
Contención de la Muerte Materna
Lanzamiento de la campaña sectorial “Bacteriemia
Cero” en el Estado de México
Transmisión del 1er Simposium de Medicina
Transfusional
Curso «Radioterapia Intraoperatoria» en
colaboración con el Hospital General Universitario
"Gregorio Marañón" de Madrid, España
Sesiones semanales de los Hospitales de Alta
Especialidad

Telemedicina

Sistema Quirúrgico Robótico
en México (Da Vinci)

La ciencia de la medicina y el rápido cambio de la tecnología aplicada a la medicina, implica la posibilidad de que pueda haber conflicto entre la práctica, la innovación y lo que el público demanda. Aunque el término general de "cirugía robótica" se usa a menudo para referirse a la tecnología, este término puede dar la impresión de que el robot ejecuta por sí solo la cirugía cosa que no es cierto porque no lo puede hacer, no puede actuar en forma autónoma. Lo que hace es replicar a escala y en forma precisa los movimientos que el cirujano hace en la consola de control.
Antecedentes Cirugía Robótica

Sistema Quirúrgico Robótico Da Vinci
El Sistema Quirúrgico Robótico Da Vinci supera las limitaciones tradicionales de la cirugía al ampliar la capacidad del cirujano en la cirugía mayor de mínima invasión, lo cual nos permite tener menor estancia hospitalaria, así como menos riesgo de infección, menor sangrado y necesidad de transfusión sanguínea y menos complicaciones postquirúrgicas, lo cual por ende nos permite una recuperación más rápida y un regreso más rápido a las actividades de la vida diaria. Este Sistema se encuentra en el Hospital Regional de Alta Especialidad de Zumpango y nos permite realizar cirugías urológicas, ginecológicas y de cirugía general.

Controles maestros
Descripción del Sistema Quirúrgico Robótico
Anaquel de instrumentos
Control de cámara Precisión Destreza Control
Consola de cirujano
Sistema Robótico al lado del paciente (Interactivo). con cuatro brazos robóticos de alto rendimiento “InSite®”

Menor estancia hospitalaria Menos dolor postoperatorio
Ventajas para el paciente
Mayor seguridad por: Menos riesgo de infección Menor sangrado y necesidad de transfusión sanguínea Menos complicaciones postquirúrgicas Menor cicatriz y tiempo de cicatrización
Recuperación más rápida Regreso más rápido a las actividades de la vida diaria Menores gastos al paciente
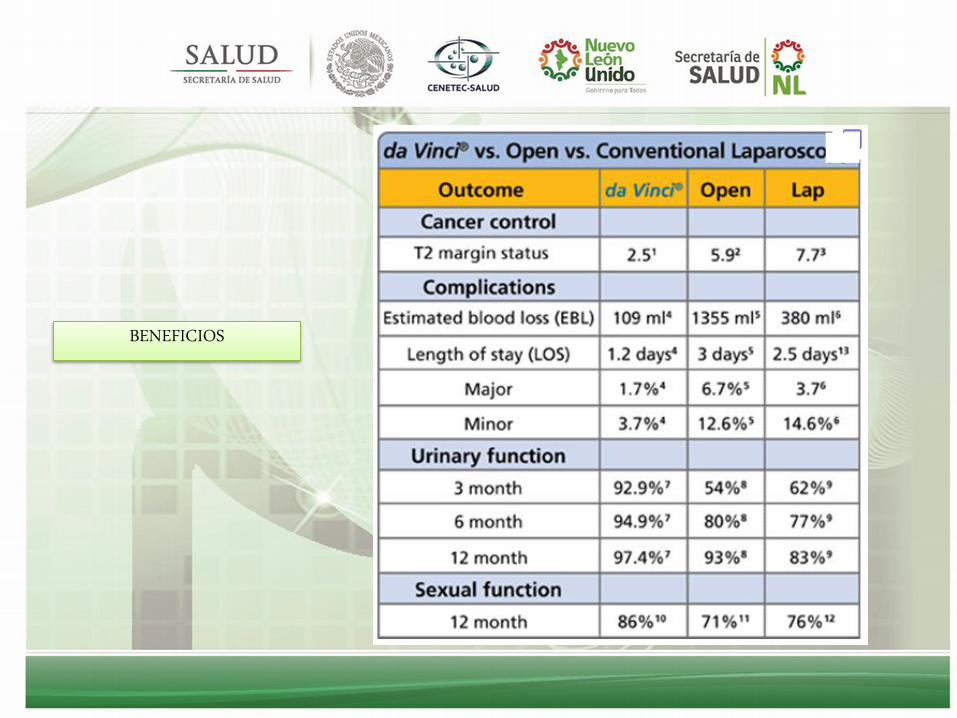
BENEFICIOS

Mayor precisión quirúrgica Aumento en el control de los movimientos de la mano del cirujano Mejor destreza y control Mayor y mejor visualización en 3 D y alta resolución Posibilidad de una disección minuciosa en espacios reducidos Delicada manipulación de tejidos El sistema requiere que cada maniobra quirúrgica se realice con la intervención directa de un cirujano experto.
Ventajas para el cirujano

Surgical Robotics: A Central Role
Tele-operation Simulation Augmented Reality
Pre-op Planning Connectivity


Da Vinci en Zumpango

Experiencia Sistema Da Vinci en Zumpango
La primera operación con el Sistema Quirúrgico Robótico Da Vinci se realizó el 21 de octubre del 2013 (colecistectomía)
No. Procedimiento Cantidad
1 Prostatectomía 17 2 Colecistectomía 7 3 Funduplicatura 6 4 Plastia Inguinal 6 5 Histerectomía 5 6 Linfadenectomía 2 7 Derivación biliodigestiva 2 8 Nefrectomía radical 2 9 Gastrectomía vertical en manga 2 10 Pieloplastía 2 11 Drenaje de quiste hepático 1 12 Exploración de vías biliares 1 13 Cardiomiotomía de Héller 1 14 Ureteronefrectomía 1 15 Bypass gástrico 1 16 Nefrectomía parcial 1
Total 57




La tecnología por sí sola no basta. También tenemos que poner el corazón.
Jane Goodall
