a - profe saul - pagina personal de... · web viewes decir, la norma de una matriz es la norma más...
TRANSCRIPT

A.3 Normas de Vectores y Matrices Definición A.16 Producto Interno
Sea un espacio vectorial sobre . Una operación se denomina Producto Interno o Producto interior si satisface las siguientes condiciones P.1
P.2
P.3
Ejemplo A.20 El producto escalar usual es un producto interno. Se define como
en donde , son las coordenadas de , respectivamente, y la dimension del espacio es ,Definición A.17 Norma de un vector
Sea un espacio vectorial sobre . Una operación es una función de Norma si satisface las siguientes condiciones N.1
N.2
si y sólo si N.3
N.4
Ejemplo A.21 Sea un espacio vectorial sobre , y sea un producto interno de ese espacio. La cantidad
Es una función de Norma. El signo resalta que se trata de la raiz positiva del producto interno de consigo mismo. Una norma asi definida se conoce como una Norma inducida por el producto interno
Ejemplo A.22 Sea un espacio vectorial de orden , y sean las coordenadas del vector . En esas condiciones, las siguientes funciones son funciones de normas:

1.
2.
3.
4.
Definición A.18 Distancia entre vectores
Sea un espacio vectorial sobre , y sea una norma definida en ese
espacio vectorial. Se define la distancia entre los vectores y como la operación
tal que
Toda función de distancia satisface las siguientes propiedades: d.1
d.2
si y sólo si d.3
d.4
Definición A.19 Vector Normal Un vector es normal si su norma es Definición A.20 Bola unitaria
Sea un espacio vectorial sobre , y sea una función de distancia definida en ese espacio vectorial. Se define la Bola unitaria como el conjunto de todos los vectores cuya distancia al origen sea . También puede definirse de forma equivalente como el conjunto de todos los vectores cuya norma sea , o lo que es igual, el conjunto de todos los vectores normales.Ejemplo A.23 La figura E.3 muestra las bolas unitarias para tres funciones de
distancia diferentes, originadas las siguientes normas , y definidas en el Ejemplo E.22, para el espacio vectorial . Como se trata de un espacio de dimensión se emplea el término circunferencia unitaria en lugar de bola unitaria

Definición A.21 Ángulo entre vectores
Sea un espacio vectorial sobre , sea un producto interno
definido en ese espacio, y la norma inducida por . Se define el ángulo entre los
vectores y mediante asi:
Definición A.22 Vectores ortogonales
Un conjunto de vectores es ortogonal si
Definición A.23 Vectores ortonormales
Un conjunto de vectores es ortonormal si es ortogonal y todos sus vectores son normales, es decir, si
en donde se conoce como la función delta de KroneckerTeorema A.9 Los elementos de un conjunto ortogonal de vectores son linealmente independientes
Demostración A.9 Supóngase un conjunto ortogonal y construyamos una combinación lineal nula de ellos:
Si seleccionamos un vector cualquiera y efectuamos el producto interno a cada lado de la ecuación tenemps
Como se trata de un sistema ortonormal y por lo tanto

Este conclusión se puede obtener para todos los coeficientes , por lo tanto la unica combinación lineal nula de los vectores es la que tiene coeficientes nulos, es decir, los vectores son linealmente independientes.Definición A.24 Proceso de Ortonormalización de Gram-Schmidt
Sea un espacio vectorial sobre , sea un producto interno
definido en ese espacio, y la norma inducida por .Dado un conjunto de vectores
linealmente independientes es posible encontrar un conjunto de vectores
ortognormales siguiendo el proceso de ortonormalización de Gram-Scmidt:
Definición A.25 Norma de una matriz cuadrada Sea una transformación lineal . Se define la Norma de la matriz empleando una norma vectorial como
Es decir, la norma de una matriz es la norma más grande que se obtiene al aplicar la transformación lineal sobre los elementos de la bola unitaria.Ejemplo A.24 Sea la matriz
Para calcular aplicamos la transformación a la circunferencia unitaria de la
norma , tal como se muestra en la figura E.4.

La mayor distancia al origen que resulta es, según la norma , la correspondiente a
los puntos y , por lo tanto
Ejemplo A.25 Sea la matriz
Para calcular aplicamos la transformación a la circunferencia unitaria de la
norma , tal como se muestra en la figura E.5.
La mayor distancia al origen que resulta es, según la norma , la marcada en la figura E.5 como . Es un ejercicio interesante demostrar que esta distancia
corrresponde a los puntos y por lo tantoA.1
También puede demostrarse que

Ejemplo A.26 Sea la matriz
Para calcular aplicamos la transformación a la circunferencia unitaria de la
norma , tal como se muestra en la figura E.6.
La mayor distancia al origen que resulta es, según la norma , la correspondiente a
cualquiera de los puntos cuya segunda coordenada es o , por ejemplo , por lo tanto
Oscar Germán Duarte Velasco 2002-12-18

A.4 Sistemas de Ecuaciones Algebráicas El propósito de esta sección es el de presentar algunas propiedades de las matrices. Para ello, consideramos el sistema de ecuaciones algebráicas:
(A.14)
que puede escribirse en forma matricial como
(A.15)
La ecuación (E.15) puede interpretarse como el sistema de ecuaciones algebraícas (E.14), como una transformación lineal , o en general como una transformación lineal de un espacio vectorial de dimensión a otro espacio vectorial de dimensióm .
Empleamos esta múltiple interpretación para hacer algunas definiciones y obtener ciertas conclusiones acerca de la existencia y unicidad del sistema de la solución del sistema de ecuaciones algebráicas.
Definición A.26 Codominio
El Codominio de un operador lineal es el conjunto definido como
Teorema A.10 El codominio de un operador lineal es un subespacio de
Demostración A.10 Es claro que el codominio es un subconjunto de , es decir
. Supónganse dos vectores , de . Según la definición E.26
existen dos vectores , en tales que
Gracias a la linealidad de cualquier combinación lineal de , puede escribirse como

es decir, para cualquier combinación lineal de , es posible encontrar un
elemento tal que y por lo tanto según el teorema E.1 es un subespacio de Definición A.27 Rango
El Rango de una matriz , denotado por es la dimensión del codominio del operador lineal representado por (ver figura E.7)
Teorema A.11 El rango de una matriz es igual el número de columnas linealmente independientes de
Demostración A.11 Si denotamos la ésima columna de como , es decir
la ecuación E.15 puede escribirse como
es decir, es una combinación lineal de las columnas de cuyos coeficientes son
. El codominio de será entonces el conjunto de todas las posibles
combinaciones lineales de las columnas de , es decir
; por lo tanto la dimensión de , que es , será igual al número de elementos
linealmente independientes en el conjunto . Ejemplo A.27 Considérese la transformación lineal de en representada por
en donde es la matriz
Esa transformación toma un punto en el plano y lo convierte en un punto sobre el eje horizontal (figura E.8):

El codominio de , que denotamos por resulta ser el eje horizontal, es decir, un
subespacio de . La dimensión de , que es el rango de , denotado por es entonces . Nótese que el número de columnas linealmente independientes de también es
Ejemplo A.28 Considérese la transformación lineal de en representada por
en donde es la matriz
Esa transformación toma un punto en el plano y lo convierte en un punto sobre la recta de pendiente (figura E.9):
El codominio de , que denotamos por resulta ser la recta identidad, es decir, un
subespacio de . La dimensión de , que es el rango de , denotado por es entonces . Nótese que el número de columnas linealmente independientes de también es

En el teorema E.14 se demuestra que el rango de una matriz no se altera al premultiplicarla o posmultiplicarla por matrices no singulares. Esto significa que las operaciones elementales sobre matrices no alteran el rango de una matriz y por lo tanto puede comprobarse que el rango también es igual el número de filas linealmente
independientes de la matriz, es decir, para una matriz de dimensiones se tiene que
(A.16)
Además, puede demostrarse que una matriz es no singular si y sólo si todas sus filas y todas sus columnas son linealmente independientes,
Teorema A.12 El sistema de ecuaciones (E.15) donde es una matriz tiene
solución para todo en si y solo si , o lo que es equivalente, si y sólo
si Demostración A.12 La demostración se desprende directamente de las definiciones E.26 y E.27Definición A.28 Espacio Nulo
El Espacio Nulo de un operador lineal es el conjunto definido como
La linealidad del operador permite demostrar que el Espacio Nulo es un Subespacio de . Esto permite hacer la siguiente definición
Definición A.29 Nulidad
La Nulidad de un operador lineal , denotada por es la dimensión del espacio nulo de
El ejemplo E.29 muestra la relación existente entre el rango y la nulidad de un operador lineal , (figura E.10)
(A.17)

Teorema A.13 El sistema de ecuaciones con una matriz tiene una
solución distinta de la trivial si y sólo si o lo que es equivalente, si y sólo si
Demostración A.13 De la definición E.29 se desprende que el número de soluciones
linealmente independientes de es . Para que exista una solución no trivial
se necesita que . Empleando (E.17) esta condición se convierte en ,
que es equivalente a , ya que las columnas de serían linealmente dependientes.Ejemplo A.29 Supóngase el sistema de ecuaciones donde es la matriz
en donde las dos primeras columnas son linealmente independientes, pero las últimas
tres no lo son ( ), ya que pueden escribirse como combinaciones lineales de las dos primeras:
(A.18)
El sistema de ecuaciones puede escribirse como
(A.19)

Empleando (E.18) la ecuación (E.19) se convierte en
(A.20)
(A.21)
Como y son linealmente independientes, (E.21) sólo puede cumplire si los coeficientes son cero, es decir si
(A.22)
El sistema de ecuaciones (E.22) tiene 5 incógnitas y 2 ecuaciones linealmente
independientes, es decir, existe 3 grados de libertad para escoger los valores de .
Dicho de otra forma, . Nótese que ( ), cumpliendo con la ecuación (E.17).
Podemos escoger arbitrariamente los valores de 3 de las incógnitas y deducir el valor
de las otras dos, para construir una base de . Si seleccionamos , y como
los trios , y tendremos los tres vectores base de :
Teorema A.14 Sea una matriz y , dos matrices no singulares
cualesquiera y respectivamente. En esas condiciones se tiene que
Demostración A.14 La demostración se apoya en la desigualdad de Sylvester, que
establece que si existen dos matrices y de dimensiones y entonces

(A.23)
Al aplicar (E.23) a y se tiene que
como y son no singulares, sus rangos son y respectivamente:
Por (E.16) se sabe que , por lo tanto
Las desigualdades sólo pueden cumplirse simultáneamente si se tiene que
Oscar Germán Duarte Velasco 2002-12-18
Subsecciones A.5.1 Valores propios diferentes A.5.2 Valores propios repetidos A.5.3 Obtención de vectores propios generalizados
A.5 Valores y Vectores Propios Definición A.30 Valor Propio y Vector PropioA.2
Sea una transformación lineal . Un escalar es un valor propio si existe un vector no nulo tal que . Cualquier vector no nulo que satizfaga
(A.24)
es un vector propio asociado con el valor propio .
La definición E.30 implica que para un vector propio el efecto de aplicarle la transformación lineal que amplificarlo por el escalar . Esto implica que un vector y

el vector transformado son colineales o paralelos y por lo tanto linealmente dependientes.
La definición E.30 se refiere estrictamente a valores y vectores propios por derecha, para distinguirlos de los valores y vectores propios por izquierda, que deben satisfacer
. En este texto sólo se consideran los primeros, y poir tanto se hace referencia a ellos simplemente como valores y vectores propios.
Teorema A.15 es un valor propio de s y sólo si satisface la ecuación (A.25)
donde es la matriz identidad de igual orden que Demostración A.15 Si es un valor propio de entonces existe un vector tal que
El término puede escribirse como para facilitar la factorización de
De acuerdo con el teorema E.13 esta ecuación tiene solución no trivial (existe un vector propio ) sí y sólo si
Como el determinante de una matriz no se afecta al multilpicar ésta por un escalar no nulo, podemos escribir
El teorema E.15 brinda una posibilidad para calcular los valores propios de :
podemos construir el polinomio característico y encontrar sus
raices. Cada raiz de será un valor propio de . Los vectores propios pueden obtenerse directamente de (E.24)
Debido a que los valores propios resultan ser las raices del polinomio característico, éstos pueden ser reales o complejos, diferentes o repetidos.
Definición A.31 Multiplicidad
La multiplicidad de un valor propio es el número de veces que éste se repite como raiz del polinomio característico.Ejemplo A.30 Obtener los valores y vectores propios de la matriz
Construimos la matriz y hallamos su determinante:
Los valores propios de serán las raices de
Los vectores propios asociados a deben cumplir (E.24):
Se crea entonces un sistema de ecuaciones con infinitas soluciones:
Para obtener un vector propio asociado a podemos escoger arbitrariamente un
valor para o para . Por ejemplo, si escogemos obtenemos . En
consecuencia, un vector propio asociado a será
en general
Los vectores propios asociados a también deben cumplir (E.24):
Se crea entonces un segundo sistema de ecuaciones con infinitas soluciones:
Para obtener un vector propio asociado a podemos escoger arbitrariamente un
valor para o para . Por ejemplo, si escogemos obtenemos . En
consecuencia, un vector propio asociado a será
en general Ejemplo A.31 Obtener los valores y vectores propios de la matriz

Construimos la matriz y hallamos su determinante:
Los valores propios de serán las raices de
Al aplicar (E.24) para y se obtienen dos sistemas de ecuaciones con infinitas soluciones
Seleccionando arbitrariamente y se obtiene
o en general
A.5.1 Valores propios diferentes Teorema A.16 Sea una transformación lineal con valores propios no repetidos, y
sea un vector propio de asociado al valor propio . En esas condiciones es
directamente proporcional a cualquier columna no nula de adjDemostración A.16 La demostración se basa en que para una matriz se tiene que
adj (A.26)
Al aplicar (E.26) a la matriz se tiene
adj
Como es un vector propio de asociado al valor propio , entonces o lo que es igual
(A.27)

lo que implica que y por tanto
adj (A.28)
Comparando (E.27) y (E.28) se concluye que es directamente proporcional a
cualquier columna no nula de adj
Ejemplo A.32 Para obtener los vectores propios del ejemplo E.30 construimos
adj adj adj
adj adj adj
Teorema A.17 Sean valores característicos diferentes de , y sea
un vector caracterísitico asociado a con . El conjunto
es linealmente independienteDemostración A.17 Efectuamos la demostración por contradicción. Suponemos que
los son linealmente dependientes, y por lo tanto existen algunos de los cuales no son nulos, tales que
Suponemos que , (si es necesario reordenamos los vectores) y multiplicamos a
cada lado de la ecuación por
(A.29)
El producto se puede calcular como
Y por lo tanto (E.29) se convierte en

Por hipótesis, todos los son diferentes, lo que significa que . Con esta contradicción se concluye la demostración
Teorema A.18 Sea una transformación lineal ; sean los valores
propios de y un vector propio asociado a , con . Si todos los
son diferentes, entonces el conjunto es una base de Demostración A.18 Según el teorema E.17 el conjunto es linealmente independiente. Como además tiene elementos, según el teorema E.2 el conjunto es una base
Teorema A.19 Sea una transformación lineal ; sean los valores
propios de y un vector propio asociado a , con . Si todos los son diferentes, entonces la transformación lineal se representa en la base
por una matriz diagonal en la que el elemento ésimo de la
diagonal es
(A.30)
Demostración A.19 El teorema E.7 permite obtener la representación de en la nueva base. Si denotamos esta representación por tendremos
con la Matriz modal que contiene los vectores propios
Para demostrar el teorema construimos y demostramos , o lo que es equivalente, :
Calculamos por separado y :
(A.31)
(A.32)

Como entonces las ecuaciones (E.31) y (E.32) se reducen a o lo que es igual
Ejemplo A.33 La transformación lineal representada por la matriz
cuyos valores propios son (Ejemplo E.30) , con vectores propios :
Tiene una representación en la base por la matriz diagonal
Ejemplo A.34 La transformación lineal representada por la matriz
cuyos valores propios son (Ejemplo E.31) con vectores propios :
Tiene una representación en la base por la matriz diagonal
A.5.2 Valores propios repetidos La diagonalización planteada en el teorema E.19 no siempre es posible si existen valores propios repetidos. Esto se debe a que el teorema E.17 se refiere a valores propios distintos, y sin ese resultado no puede asegurarse que el conjunto
sea una base. Esto se traduce en que la matriz modal puede ser singular, y por tanto (E.30) no puede usarse debido a que no existe. Definición A.32 Degeneracidad
El número de vectores propios de una transformación lineal de orden
linealmente independientes asociados a un valor propio es la degeneracidad del valor
propio , denotada por
Teorema A.20 La degeneracidad de , un valor propio de una transformación lineal
de orden es igual a

(A.33)
Demostración A.20 Los vectores propios de asociados a deben cumplir
Según la definición E.29, el número de vectores propios linealmente independientes serán entonces la nulidad de la matriz que premultiplica al vector,
Podemos emplear (E.17) para escribir
Ejemplo A.35 Obtener los valores y vectores propios de la matriz y diagonalizarla
Construimos la matriz y hallamos su determinante:
Los valores propios de serán las raices de
La degeneracidad de se obtiene con (E.33):
Lo anterior significa que aunque tiene multiplicidad , sólo es posible encontrar un vector linealmente independiente. Este se obtiene empleando (E.24), y resulta ser
en general
No es posible construir una base para el espacio de dimensión con un sólo vector, por lo tanto no es posible diagonalizar
Ejemplo A.36 Obtener los valores y vectores propios de la matriz y diagonalizarla

Construimos :
Su polinomio característico resulta ser
Las raices del polinomio son . Para determinar la degeneracidad de
calculamos
Lo anterior significa que existen dos vectores propios linealmente independientes
asociados a . Estos dos vectores junto con el vector propio asociado a
pueden formar una base y por tanto es posible diagonalizar . Para obtener los tres vectores propios empleamos (E.24):
Se originan los sistemas de ecuaciones
Que se convierten en
Podemos construir dos vectores linealmente independientes que satisfacen
y un tercero que satisface , por ejemplo
En la base la transformación se representa por :

Definición A.33 Vectores Propios Generalizados Sea una transformación lineal y sea un valor propio de . es un un vector propio generalizado de grado de asociado a si y sólo sí
(A.34)
Nótese que para la ecuación (E.34) se reduce a con , que coincide con la definición E.30 de vector propio
Definición A.34 Cadena de vectores propios generalizados Sea una transformación lineal y sea un vector propio generalizado
de orden asocialdo a . Los vectores forman una cadena de vectores propios generalizados de longitud si y sólo sí
(A.35)
Teorema A.21 Sea el espacio nulo de . es un subespacio de .
Demostración A.21 Sea un vector en , por lo tanto ; al
multiplicar a cada lado por se tiene que y por lo tanto
está en . Esto demuestra que , y por lo tanto es un subespacio de
.
Teorema A.22 Sea el espacio nulo de . Sea el ésimo vector de
una cadena como las definidas en (E.35). El vector está en pero no en
Demostración A.22 La demostración se obtiene calculando y
y utilizando (E.35) y (E.34):

Los teoremas E.21 y E.22 se visualizan en la figura E.11. Cada subespacio nulo está
embebido dentro del subespacio nulo , y el vector está justo en la diferencia
entre y .
Teorema A.23 Los vectores de una cadena de vectores propios generalizados como los de la definición E.34 son linealmente independientes
Demostración A.23 dado que cada vector pertenece a un subespacio diferente, según se muestra en la figura E.11, estos vectores no pueden ser linealmente dependientes.
Ejemplo A.37 Sea la transformación
que tiene un valor propio repetido Para encontrar los espacios nulos y construimos las matrices y :
El espacio nulo es el conjunto de los vectores tales que , mientras que
el espacio nulo es el conjunto de los vectores tales que . Claramente se ve que

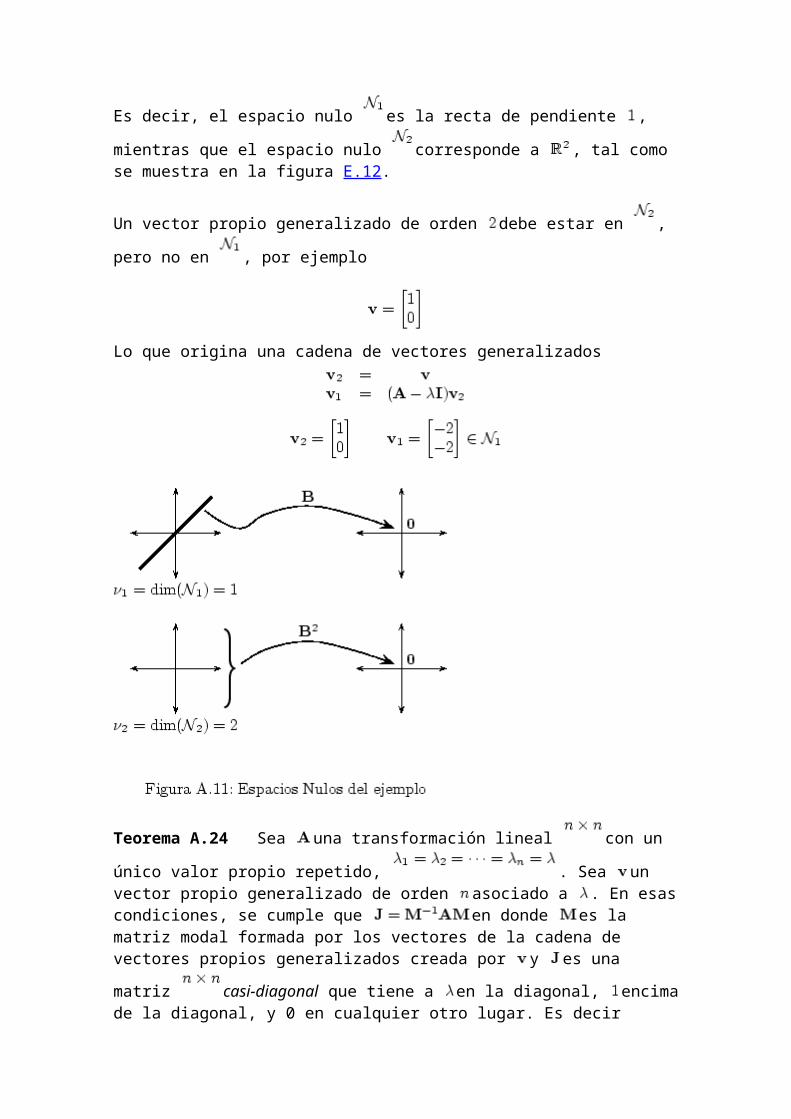
Es decir, el espacio nulo es la recta de pendiente , mientras que el espacio nulo
corresponde a , tal como se muestra en la figura E.12.
Un vector propio generalizado de orden debe estar en , pero no en , por ejemplo
Lo que origina una cadena de vectores generalizados
Teorema A.24 Sea una transformación lineal con un único valor propio
repetido, . Sea un vector propio generalizado de orden asociado a . En esas condiciones, se cumple que en donde es la matriz modal formada por los vectores de la cadena de vectores propios generalizados
creada por y es una matriz casi-diagonal que tiene a en la diagonal, encima de la diagonal, y 0 en cualquier otro lugar. Es decir

(A.36)
Demostración A.24 Demostrar (E.36) equivale a demostrar , por lo tanto calculamos por separado y y comparamos los resultados:
De acuerdo con la definición E.34, el vector de la cadena se calcula como
, por lo tanto
lo que significa que las columnas de son iguales a las de . Para demostrar que la primera columna también es igual, empleamos el teorema E.22, según
el cual , es decir
y por lo tanto , lo que concluye la demostración.
Ejemplo A.38 Sea la transformación
que tiene un valor propio repetido y una cadena de vectores propios generalizados (ejemplo E.37):
El resultado de calcular es

A.5.3 Obtención de vectores propios generalizados
El teorema E.24 supone que la matriz tiene un vector propio generalizado de orden asociado al valor propio , a partir del cual se construye una única cadena de vectores. Esto no siempre sucede, por lo tanto, es necesario contar con un procedimiento para encontrar el conjunto de vectores propios asociados a .
Según el teorema E.21, es un subespacio de , si denotamos por la dimensión
de , lo anterior significa que .
Este hecho permite construir el diagrama de Matthew (figura E.13) en el que se
muestran las nulidades mediante casillas de un arreglo ( será igual al
número de casillas para en el arreglo).
Debido a que es el espacio nulo de , es posible calcular empleando (E.17) y de esa manera establecer la forma del diagrama de Matthew
Si definimos el diagrama de Matthew tendra la forma que se muestra en la figura E.14
Ejemplo A.39 Forma del arreglo

Cada casilla del diagrama de Matthew podria contener un vector de la base para un .
Los vectores que sirven de base para tambien pueden formar parte de la base de
, ya que .
Debido al teorema E.22, un vector de una cadena de vectores puede formar parte de
una base para que no pueden formar parte de una base para . Esto permite
diseñar una estrategia para buscar las bases de los y asi llenar el diagrama de Matthew. Para ello empleamos las siguientes convenciones .
1. Identificar el número de columnas del diagrama como
2. Identificar las columnas del diagrama como de izquierda a derecha
3. Identificar el tamaño de cada columna como
4. Identificar cada celda por los subindices , con e
de arriba a abajo
5. Identificar el vector de la celda por
Para llenar el diagrama de Matthew deben buscarse vectores propios generalizados
de orden respectivamente. Cada uno de estos vectores
estará ubicado en la primera celda de las columnas, es decir . Cada columna se completa con la cadena de vectores propios generalizados creada por el primer elemento de la columna. La forma que adopta el diagrama de Matthew se muestra en la figura E.15
Ejemplo A.40 Sea la matrizA.3

Para calcular los valores propios de hacemos
Es decir, tiene un valor propio de multiplicidad y un valor propio 0 de multiplicidad . Nos proponemos encontrar el diagrama de Matthew de los vectores
propios asociados a .
Para ello definimos y calculamos
Dado que no es necesario continuar, pues lo que implica que , el
máximo valor posible para una matriz . Con la información anterior podemos
calcular :
Con esta información podemos construir el diagrama de Matthew
De donde se deduce que , y .
El algoritmo para encontrar es el siguiente:
1.2. una matriz vacía 3. una matriz vacía
4. Encontrar , una base para
5. Construir
6. Emplear el algoritmo izquierda-a-derecha para extraer las columnas de linealmente independientes y adicionárselas a . Por cada columna que se
extraiga de se extrae la columna correspondiente de y se adiciona a la matriz
7. Sea la siguiente columna con . Hacer y repetir desde 4 hasta terminar las columnas
8. es la matriz que contiene a
Ejemplo A.41 Para obtener los vectores y del ejemplo E.40 identificamos
, , , y empleamos el algoritmo siguiendo los siguientes pasos
1. Para se tiene que , por lo tanto buscamos una base para , es decir buscamos los vectores tales que :
2. Construimos

3. Al aplicar el algoritmo izquierda-a-derecha sólo se extrae la primera columna de
, por lo tanto las matrices y serán:
4. La siguiente columna de altura menor a es la columna , con , por lo
tanto buscamos una base para , es decir buscamos los vectores tales que :
5. Construimos
6. Al aplicar el algoritmo izquierda-a-derecha sólo se extraen la primera y la cuarta
columnas de , por lo tanto las matrices y serán:

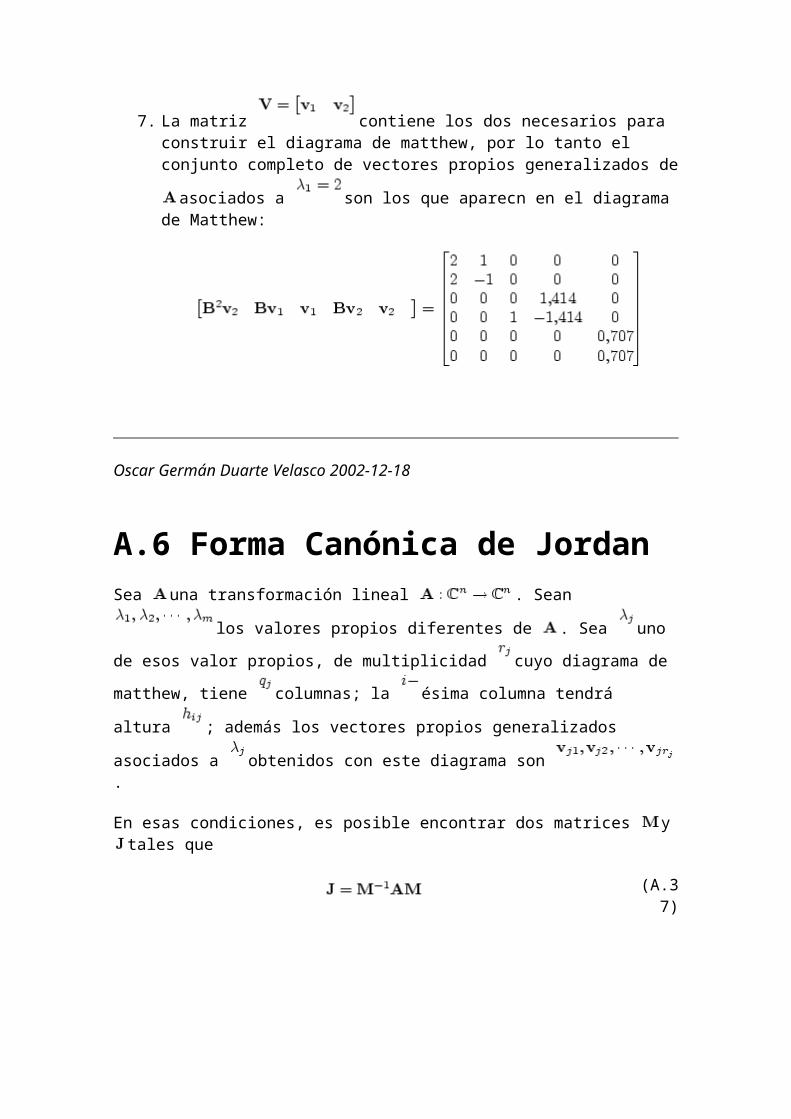
7. La matriz contiene los dos necesarios para construir el diagrama de matthew, por lo tanto el conjunto completo de vectores propios generalizados
de asociados a son los que aparecn en el diagrama de Matthew:
Oscar Germán Duarte Velasco 2002-12-18
A.6 Forma Canónica de Jordan
Sea una transformación lineal . Sean los valores
propios diferentes de . Sea uno de esos valor propios, de multiplicidad cuyo
diagrama de matthew, tiene columnas; la ésima columna tendrá altura ;
además los vectores propios generalizados asociados a obtenidos con este diagrama
son .
En esas condiciones, es posible encontrar dos matrices y tales que
(A.37)

(A.38)
(A.39)
(A.40)
es conocida como la Forma canónica de Jordan de . La ecuación E.38 muestra que la matriz es diagonal por bloques, es decir, esta formada por bloques organizados en la diagonal. Por fuera de estos bloques sólo hay ceros en la matriz. es la matriz modal, y está formada por los vectores propios generalizados de . La matriz modal no es única.
Los bloques que forman tienen las siguientes propiedades:
Cada valor propio diferente tendrá asociados uno o varios bloques
El número de bloques asociados a será igual al número de columnas de su
diagrama de matthew,
Los bloques son cuadrados, y el tamaño del bloque (el número de filas o de columnas) es igual a la altura de la columna correspondiente en el diagrama de
Matthew, .
Cada bloque tiene en la diagonal al valor propio , tiene por encima de la diagonal, y cero en las restantes casillas.

Cada valor propios que no se repita tendrá asociado un único bloque de tamaño 1
En el caso sencillo en que ningún valor propio se repita será una matriz
diagonal que tendrá en la diagonal a los valores propios .
Ejemplo A.42 Para obtener la forma canónica de Jordan de la matriz del ejemplo E.40, se necesita construir la matriz modal con todos los vectores propios
generalizados. En el ejemplo E.41 se calcularon los vectores asociados a . En
vector propio asociado a será:
Por lo tanto la matriz modal será
La forma canónica de Jordan será
Nótese que el valor propio tiene dos bloques de Jordan asociados de tamaño y respectivamente, tal como se podría infereir de su diagrama de matthew: el diagrama
tiene dos columnas, la primera de altura 3 y la segunda de altura 2.
El valor propio no se repite, y por tanto tiene un único bloque de jordan asociado de tamaño 1.

Oscar Germán Duarte Velasco 2002-12-18 Subsecciones
A.7.1 Bloques de Jordan de tamaño 1 o A.7.1.1 Otra alternativa o A.7.1.2 Una interpretación
A.7.2 Bloques de Jordan de tamaño mayor que 1
A.7 Forma Canónica Real de Jordan Dado que los valores propios de una matriz pueden ser complejos, en general las matrices y que aparecen en las ecuaciones (E.38), (E.39) y (E.40) serán complejas.
No obstante, cuando existen valores propios complejo es posible efectuar otro cambio de coordenadas diferente que produce también una matriz diagonal por bloques, pero real, conocida como la Forma canónica Real de Jordan.
A.7.1 Bloques de Jordan de tamaño 1
Supóngase que la matriz tiene dos valores propios complejos conjugados
y , y que cada uno de estos valores tiene un bloque de
Jordan de tamaño 1 asociado a los vectores propios generalizados y , que también son complejos conjugados. Es decir, la forma canónica de Jordan de es de la forma
La forma Canónica Real de Jordan remplaza los dos bloques de tamaño 1 por uno de tamaño 2 de la forma
Es decir, la forma Canónica Real de Jordan de será

La matriz modal real se obtiene remplazando en los vectores complejos
conjugados y por dos vectores reales con la parte real y la parte imaginaria de , es decir
Ejemplo A.43 Sea la matriz
Los valores propios de son
La Forma Canónica de Jordan de y la m,atriz modal que la producen son:
Para obtener la Forma Canónica Real de Jordan de construimos la matriz real , y verificamos.

A.7.1.1 Otra alternativa
dado un bloque
existe una matriz tal que es real, con la forma canónica real de Jordan:
A.7.1.2 Una interpretación
Un bloque real de jordan asociado a un valor propio puede reescribirse de la siguente forma:
En donde es la matriz identidad, y es una matriz que cumple un papel similar a
, ya que
De esta manera, un bloque de real de jordan puede interpretarse como un número complejo matricial
A.7.2 Bloques de Jordan de tamaño mayor que 1
dado un bloque
Su forma canónica real de jordan es
En la diagonal está la nueva presentación de los e-valores, como bloques reales de jordan y sobre la diagonal está la matriz identidad. Para obtener está matriz puede procederse de forma similar a como se hace con los bloques de tamaño 1, es decir, remplazar los vectores propios complejos conjugados por vectores con las partes real e imaginaria de estos
Oscar Germán Duarte Velasco 2002-12-18
Subsecciones A.8.1 Polinomios de matrices A.8.2 Funciones como series de potencias A.8.3 Definición de funciones mediante polinomios
A.8 Funciones de Matrices Cuadradas
Sea una función que opera sobre un escalar, y sea una matriz cuadrada .
En esta sección se aborda el problema de cómo calcular , es decir, como extender
de los escalares a las matrices.
A.8.1 Polinomios de matrices
Si es un polinomio, la extensión a las matrices se fundamenta en la definición
(A.41)
Si la matriz tiene una representación canónica de Jordan obtenida con la matriz modal , es decir, si entonces
(A.42)

Como es un a matriz diagonal por bloques, el cálculo de puede efectuarse como sigue:
Empleando la definición (E.41), un polinomio genérico
puede calcularse en como
o en función de las matrices y :
(A.43)
Ejemplo A.44 Calcular cuando es una matriz diagonal:
Ejemplo A.45 Calcular cuando es una matriz con la forma de los bloques reales de Jordan para el caso en que los valores propios son imaginarios puros
calculamos los primeros términos , , , , y :
Observando la secuencia se puede inferir que

Ejemplo A.46 Calcular cuando es una matriz con la forma de los bloques de
Jordan; para ilustrar este caso supongamos una matriz de tamaño
Calculamos los primeros términos , ,
Puede verse que es una matriz triangular superior, en la que loes elementos de la fila
son los mismos elementos de la fila pero están desplazados una casilla a la derecha.
Los términos de la diagonal son . Denotemos por un elemento que esté
desplazado casillas de la diagonal en cualquier fila; será

Este resultado se puede generalizar para una matriz con la forma de los bloques de Jordan:
(A.44)
En caso de que un exponente sea negativo, el término correspondiente en E.44 será 0
A.8.2 Funciones como series de potencias
Es posible extender una función de los escalares a las matrices empleando la
representación de en series de Taylor expandidas alrededor de 0 (series de MacLaurin):
(A.45)
Empleando (E.45) se puede expresar como un polinomio de . Si es una matriz
cuadrada, puede calcularse empleando ese polinomio.
Las siguientes son las expansiones de algunas funciones comunes:
(A.46)

(A.47)
(A.48)
Ejemplo A.47 Sea una matriz diagonal como la del ejemplo E.44. Para calcular podemos emplear (E.46)
que de acuerdo con los resultados del ejemplo E.44 se calculará asi:
Cada uno de los términos de la diagonal corresponde a la expansión de en series de Taylor de una exponencial como las de (E.46), por lo tanto será:
Ejemplo A.48 Sea una matriz con la forma de los bloques reales de Jordan para el caso en que los valores propios son imaginarios puros, como la del ejemplo E.45. Para calcular podemos emplear (E.46)
que de acuerdo con los resultados del ejemplo E.45 se calculará asi:

Cada uno de los términos de la matriz corresponde a la expansión de Taylor de una sinusoide como las de (E.47) y (E.48), por lo tanto puede calcularse como
Ejemplo A.49 Sea una matriz con la forma de los bloques de jordan como la del ejemplo E.46. Para calcular podemos emplear (E.46)
que de acuerdo con los resultados del ejemplo E.46 se calculará asi:
Efectuando el cambio de variable se tiene
Cada una de las sumatorias corresponde a la expansión de taylor de una exponencial como la de (E.46), por lo tanto
(A.49)
Ejemplo A.50 Sea una matriz con la forma de los bloques reales de Jordan

Patra calcular escribimos como la suma de dos matrices:
De tal manera que . Empleando los resultados de los ejemplos E.47 y E.48 se tiene que
y por lo tanto
A.8.3 Definición de funciones mediante polinomios Definición A.35 Polinomio mínimo de una matriz
Sea una matriz cuadrada. El polinomio mínimo de es el polinomio mónico de
menor orden tal que Teorema A.25 El polinomio mínimo de una matriz cuadrada es el mismo polinomio mínimo de su representación canónica de Jordan
Demostración A.25 En virtud de (E.43), es claro que si y sólo si Definición A.36 Índice de una matriz Sea una matriz cuadrada, cuya forma canónica de jordan es , de la forma de (E.38).
Cada valor propio es de multiplicidad y tiene asociados bloques de jordan de la
forma de (E.39). Cada bloque es de tamaño . Se define el índice del valor propio
, denotado por como el tamaño más grande de los bloques de jordan asociados al
valor propio . Claramente
Teorema A.26 Sean , los valores propios de una matriz con índices
respectivamente. El polinomio mínimo de es
(A.50)
Demostración A.26 De acuerdo con el teorema E.25, basta con demostrar que (E.50) es el polinomio mínimo de , la forma canónica de Jordan de .

Consideremos primero la matriz con los bloques de jordan asociados al valor propio
:
El polinomio mínimo de es como puede comprobarse al
calcular :

De acuerdo con la definición E.36 es el tamaño del bloque de Jordan asociado a
más grande, es claro que para todos los bloques de Jordan asociados a
. Como es diagonal por bloques, y sus bloques son se desprende que
es decir, que el polinomio mínimo de es .
Siguiendo un argumento similar, como es diagonal por bloques, y sus bloques son , se tiene que el polinomio mínimo de es
Ejemplo A.51 Las matrices,
que están en la forma canónica de Jordan, tienen todas el mismo polinomio
característico . Sin embargo, el polinomio mínimo de cada una de ellas es diferente, debido a que el índice de es diferente:
para es
para es
para es
Teorema A.27 (Teorema de Caley-Hamilton) Si es el polinomio característico
de una matriz cuadrada , entonces Demostración A.27 El polinomio mímino de es
Mientras que el polinomio característico es
Como , y como , queda demostardo que

Definición A.37 Valores de una función en el espectro de una matriz
Sean , los valores propios de una matriz con índices
respectivamente. Sea el polinomio mínimo de y sea un polinomios cualesquiera.
El conjunto de valores de en el espectrio de son los valores: para
; en donde y En total
son valores
Teorema A.28 Sean , los valores propios de una matriz con índices
respectivamente. Sea el polinomio mínimo de y sean y dos polinomios cualesquiera. En esas condiciones cualquiera de las siguientes afirmaciones es equivalente
1.
2. una de dos condiciones se cumple: o bien o para
algunos polinomios o
3. Los valores de y de en el espaectro de son iguales
para ;
Demostración A.28 Dado que es evidente la equivalencia de las afirmaciones 1 y 2. Para demostrar la equivalencia entre 2 y 3 basta recordar que
y calcular las derivadas y Definición A.38 Funciones de matrices cuadradas
Sea una función, no necesariemente un polinomio, definida en el espectro de .
Si es un polinomio que tiene los mismos valores en el espectro de entonces se
define
La definición E.38 brinda una posibilidad para extender a las matrices cuadradas una
función definida para escalares. Es decir, permite calcular buscando un
polinomio adecuado y calculando . El procedimiento completo puede resumirse asi:
Sea una función, y sea una matriz . Para calcular deben seguirse los siguientes pasos

1. Obtener el polinomio característico de
2. Definir el polinomio
en donde son desconocidas. Cualquier otro polinomio de orden
es igualmente válido.
3. Plantear ecuaciones igualando los valores de y en el espectro de
para ;
4. Obtener a partir de las ecuaciones del punto anterior
5. Calcular
Ejemplo A.52 Calcular con
El problema puede plantearse también de la siguiente forma: dada calcular
. Empleamos el procedimiento propuesto:
1. El polinomio característico de es
2. Definimos el polinomio
3. Obtenemos ecuaciones

4. obtenemos y :
5. Calculamos
Ejemplo A.53 calcular cuando es una matriz con la forma de los bloques de
Jordan. Para ilustrar suponemos una matriz de orden
Empleamos el procedimiento propuesto:
1. El polinomio característico es
2. definimos un polinomio de orden
3. obtenemos ecuaciones
4. Obtenemos los valores de :

5. Calculamos
Siguiendo un procedimiento similar puede obtenerse cuando es una matrix
con la forma de los bloques de jordan
(A.51)

Ejemplo A.54 Calcular cuando es una matriz con la forma de los bloques de
Jordan y .
Empleando (E.51) se obtiene directamente
(A.52)
Nótese que las derivadas en (E.51) son respecto a . Vale la pena comparar los resultados (E.49) y (E.52)
Ejemplo A.55 Calcular cuando es una matriz con la forma de los bloques de
Jordan y .
Empleando (E.51) se obtiene directamente :
(A.53)
Oscar Germán Duarte Velasco 2002-12-18
Análisis de Sistemas LinealesCONTENIDO DEL CURSO
1. Introducción al Modelamiento de Sistemas 1.1. Conceptos preliminares 1.2. Sistemas Físicos 1.3. Grafos de Enlace de Potencia, "Bond Graphs"
2. Preliminares Matemáticos 2.1. Ecuaciones Diferenciales y de Diferencia 2.2. Transformada de Laplace y Transformada Z 2.3. Solución de E.D. mediante transformadas

3. Introducción al Análisis de Sistemas Dinámicos Lineales 3.1. Sistemas dinámicos y E.D. 3.2. Funciones de Transferencia 3.3. Diagramas de Bloques 3.4. Diagramas de Flujo de Señal 3.5. Respuesta al Impulso 3.6. Simulación de Sistemas
4. Sistemas de Primer y Segundo Orden 4.1. Sistemas Contínuos de Primer Orden 4.2. Sistemas Discretos de Primer Orden 4.3. Sistemas Contínuos de Segundo Orden 4.4. Sistemas Discretos de Segundo Orden 4.5. Efecto de los ceros. Sistemas de Fase Mínima 4.6. Polos dominantes
5. Sistemas Realimentados Simples 5.1. Tipo de Sistema y Error de Estado Estacionario 5.2. Estabilidad y Criterios de Estabilidad en Sistemas Contínuos 5.3. Estabilidad y Criterios de Estabilidad en Sistemas Discretos
6. Representación en Variable de Estado 6.1. Introducción 6.2. Algunos Resultados de Álgebra Lineal 6.3. Variables de Estado 6.4. Sistemas Contínuos libres 6.5. Sistemas Discretos libres 6.6. Sistemas Contínuos excitados 6.7. Sistemas Discretos excitados 6.8. Introducción al Control por Variable de Estado
7. Introducción a los Sistemas No Lineales 7.1. Pérdida de Superposición y Proporcionalidad 7.2. Múltiples Puntos de Equilibrio 7.3. Estabilidad Local 7.4. Órbitas Periódicas no sinusoidales 7.5. Ciclos Límite 7.6. Bifurcaciones 7.7. Comportamientos Caóticos
Apéndices A. Anotaciones al concepto de modelo B. Transformadas Z y L - Demostraciones B.1.Propiedades de la Transformada
de Laplace B.2. Propiedades de la Transformada Z B.3. Parejas de Transformadas de Laplace B.4. Parejas de Transformadas Z
C. Diagramas de Bode para Sistemas Contínuos C.1. Definición C.2. Construcción de los diagramas de Bode
D. Carta de Nichols D.1. M-circunferencias D.2. N-circunferencias D.3. Carta de Nichols
E. Apuntes de Álgebra Lineal E.1. Espacios Vectoriales E.2. Transformaciones Lineales E.3. Normas de Vectores y Matrices E.4. Sistemas de Ecuaciones algebráicas E.5. Valores y Vectores propios E.6. Forma Canónica de Jordan E.7. Forma Canónica Real de Jordan E.8. Funciones de Matrices Cuadradas