a matrícula: 202212998 asesor d a g d l
TRANSCRIPT

Proyecto de Ingeniería Biomédica
“ALINEACIÓN Y FUSIÓN DE IMÁGENES CT-SPECT
USANDO INFORMACIÓN MUTUA”
TORRES PINEDA AMANDA L. Matrícula: 202212998
Asesor DR. ALEJANDRO GUZMÁN DE LEÓN
Trimestre 08-I Junio del 2008
1
RESUMEN Este trabajo, fue propuesto por el Hospital de Especialidades de la Ciudad de México “Dr. Belisario Domínguez”, siendo nuestra primer aproximación a la alineación de imágenes CT-SPECT. En el presente se tomó como medida de similitud la información mutua, que es una de las más utilizadas en la literatura. Se hace una comparación entre los coeficientes resultantes al utilizar la versión estándar y la normalizada. Comprobándose que la información mutua normalizada es más consistente y robusta que la estándar. Una vez alineadas las imágenes, la fusión realizada fue simple, empleando la transformación del espacio color RGB al HSI, sustituyendo la componente de intensidad de la imagen funcional (SPECT) por la imagen anatómica (CT), dando resultados satisfactorios. Todo ello es muy útil en el diagnóstico médico, tanto que en los últimos años ha constituido una herramienta importante para dicho propósito. La información funcional se ubica espacialmente en el marco anatómico permitiendo la obtención de imágenes que contengan ambos tipos de información y con ello apoyar el diagnóstico. Las imágenes procesadas provienen de: un estudio efectuado a un sujeto sano en cortes axiales y uno sagital y de un caso patológico (neonato con muerte cerebral) en cortes axiales, cuyas alineaciones se llevaron a cabo a diferentes niveles anatómicos. También fueron procesadas un par de imágenes sintéticas.

2
AGRADECIMIENTOS
A mi familia, por su cariño, apoyo y comprensión; en especial a mi mamá por enseñarme que las cosas valiosas requieren esfuerzo, dedicación y la mejor actitud para obtenerlas, demostrándomelo con afecto, paciencia y sinceridad. Con cariño, hoy que he logrado concluir uno de los objetivos que me he planteado en la vida, les doy las gracias. Agradezco a mi asesor, el Dr. Alejandro Guzmán De León, por su tiempo, disposición, y dedicación en el desarrollo de este proyecto, porque sin sus enseñanzas y orientación, difícilmente lo hubiera concluido exitosamente. Y que durante esta etapa ha llegado ser un buen amigo, que me ha brindado consejo y comprensión. Mi más sincero agradecimiento al servicio de imagenología del Hospital de Especialidades de la Ciudad de México “Dr. Belisario Domínguez”, particularmente a la Dra. Alicia Graeff Sánchez, al Dr. Juan Carlos Hernández Chavolla y a la Dra. Claudia Arroyo Castelán, por su disposición y colaboración, para el desarrollo de este trabajo. También, quiero expresar un profundo agradecimiento a todos aquellos que con su amistad, apoyo y comprensión me alentaron y ayudaron a conseguir esta meta.

3
Índice
CAPÍTULO I
OBJETIVO .............................................................................................................................................................5 INTRODUCCIÓN ..................................................................................................................................................5
Adquisición de imágenes por CT y SPECT ...............................................................................................5 Tomografía computarizada (CT) ...................................................................................................................5 Tomografía por emisión de fotón único (SPECT) ...........................................................................................6
Alineación de imágenes .................................................................................................................................7 Información Mutua ........................................................................................................................................9 Definición ......................................................................................................................................................9
Propiedades de la Información Mutua .....................................................................................................11 Variantes de la Información Mutua ..........................................................................................................11 Normalización de la Información Mutua .....................................................................................................11 Coeficiente de correlación de entropía ............................................................................................................12 Ponderación de la Información Mutua .........................................................................................................12
Pasos para el registro de imágenes ............................................................................................................12 Modelo de transformación geométrica .....................................................................................................14 Coordenada homogéneas y representación matricial de transformaciones bidimensionales ................................15
Espacio de color ...........................................................................................................................................19
CAPÍTULO II
METODOLOGÍA ................................................................................................................................................21 Algoritmos .....................................................................................................................................................21 Pruebas de funcionamiento ........................................................................................................................26 Selección de pares de imágenes CT-SPECT ............................................................................................27
CAPÍTULO III
RESULTADOS .....................................................................................................................................................28 Ejemplo 1 .........................................................................................................................................................28 Ejemplo 2 .........................................................................................................................................................32 Tablas de resultados .....................................................................................................................................34
CAPÍTULO IV
ANÁLISIS DE RESULTADOS ..............................................................................................................................38

4
CAPÍTULO V
CONCLUSIONES Y PESPECTIVAS ....................................................................................................................40
BIBLIOGRAFÍA ........................................................................................................................................................41
ANEXO A
FUNCIONES EN MATLAB .................................................................................................................................43 Cálculo del histograma conjunto ...............................................................................................................43 Cálculo de la Información Mutua ..............................................................................................................43 Alineación de imágenes ...............................................................................................................................44 Transformaciones geométricas para alinear la imagen objeto original ................................................46 Cambio de espacio RGB a HSI ..................................................................................................................48 Cambio de espacio HSI a RGB ..................................................................................................................49
ANEXO B
PARES DE IMÁGENES CT-SPECT .................................................................................................................50
ANEXO C
IMÁGENES RESULTANTES ...............................................................................................................................54
5
CAPÍTULO I
OBJETIVO
El Hospital de Especialidades de la Ciudad de México “Dr. Belisario Domínguez”, proporcionó un par de estudios de cerebro, un caso patológico (neonato con muerte cerebral) y uno normal (adulto sano), obtenidos mediante CT y SPECT, para realizar la alineación y fusión de cortes correspondientes, provenientes de ambas técnicas de adquisición, esto con la finalidad de tener imágenes que proporcionen información anatómica-funcional del órgano o sistema analizado y que sirva como herramienta de apoyo para el diagnóstico al médico especialista. El objetivo principal de este proyecto, es implementar un programa basado en el desarrollo de algoritmos que permitan la alineación (registro) de imágenes de cortes tomográficos obtenidas por los sistemas de adquisición, CT y SPECT, para los propósitos planteados anteriormente. Además, se llevará a cabo un acercamiento somero a la fusión, empleando las imágenes alineadas. INTRODUCCIÓN
Adquisición de imágenes por CT y SPECT
En los últimos años el diagnóstico médico apoyado en imágenes se ha acrecentado notablemente, ya que se obtiene información rápida y precisa de la estructura analizada. Por ello, la tecnología en imagenología médica ha evolucionado, con una gran variedad en la instrumentación, la cual se basa en diferentes principios físicos, de acuerdo a las diversas fuentes de energía, como las ondas mecánicas, la radiación electromagnética ionizante y no ionizante, que aportan información visual de la anatomía y/o funcionalidad de diferentes órganos del cuerpo humano [1]. Así, la información que aportan las imágenes generadas por estos sistemas, se clasifica en: i) estructural o anatómica, en la que se muestra un corte anatómico particular y ii) funcional, en la que se refleja el funcionamiento de un órgano o región anatómica determinada. Tomografía computarizada (CT)
La tomografía computarizada (CT) es una forma de adquisición de imágenes médicas de alta resolución, por la que se obtienen proyecciones del interior del cuerpo a manera de rebanadas milimétricas, utilizando rayos X. Básicamente, el tomógrafo está compuesto por un tubo generador de rayos X y un arreglo de detectores de radiaciones que mide la intensidad del estrecho haz emitido por el tubo, después de atravesar el objeto en estudio. El haz de radiación está colimado, así que está dirigido y tiene un grosor determinado. Este incide sobre el objeto, parte de la radiación es absorbida por este y otra parte lo atraviesa. La intensidad de radiación que no ha sido absorbida, es recogida por los detectores, enviándola en forma de señal a una computadora. Posteriormente la fuente de emisión cambia su
6
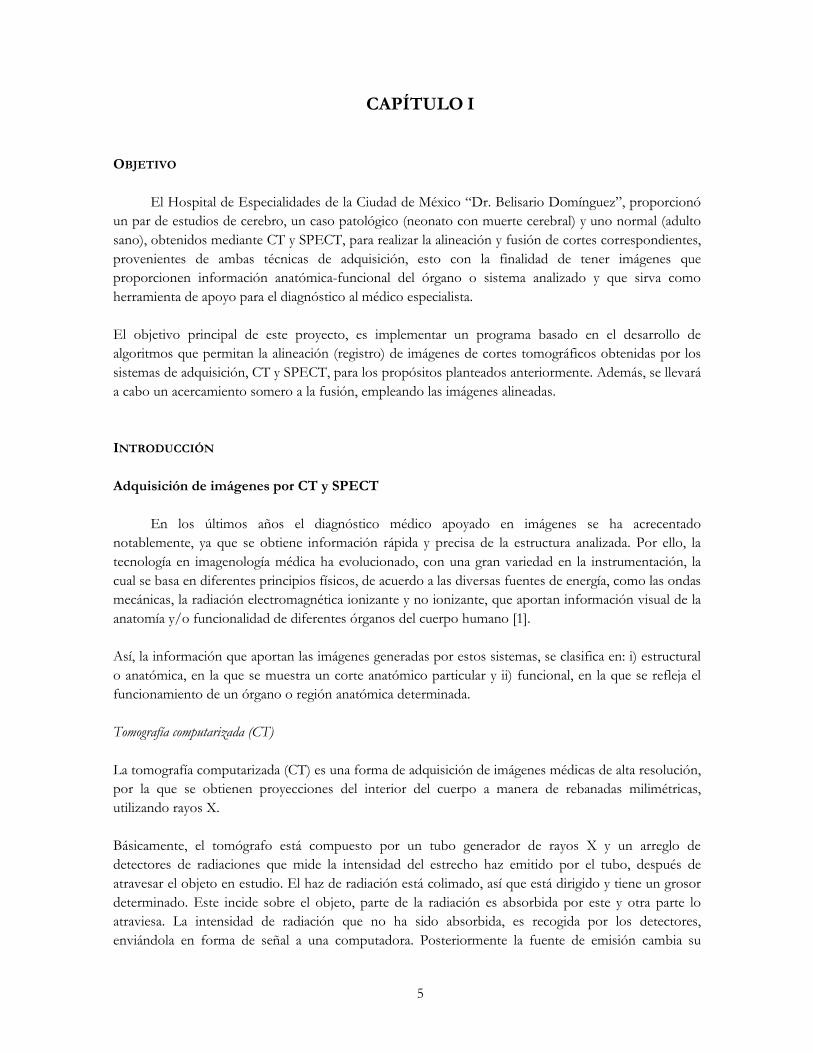
orientación y nuevamente una proyección es recogida por los detectores. Esto se repite hasta que el tubo de rayos y los detectores han cubierto una vuelta completa, tomando como eje de rotación al cuerpo humano.
Figura 1. Esquema de la adquisición de imágenes por CT
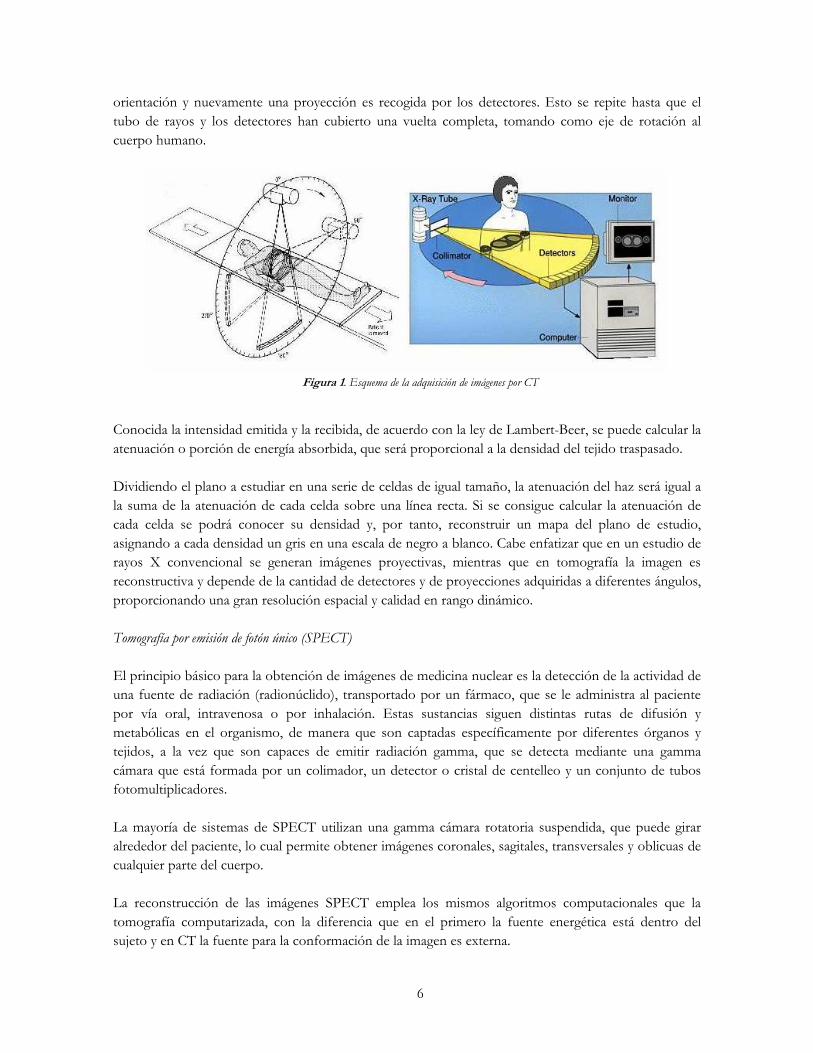
Conocida la intensidad emitida y la recibida, de acuerdo con la ley de Lambert-Beer, se puede calcular la atenuación o porción de energía absorbida, que será proporcional a la densidad del tejido traspasado. Dividiendo el plano a estudiar en una serie de celdas de igual tamaño, la atenuación del haz será igual a la suma de la atenuación de cada celda sobre una línea recta. Si se consigue calcular la atenuación de cada celda se podrá conocer su densidad y, por tanto, reconstruir un mapa del plano de estudio, asignando a cada densidad un gris en una escala de negro a blanco. Cabe enfatizar que en un estudio de rayos X convencional se generan imágenes proyectivas, mientras que en tomografía la imagen es reconstructiva y depende de la cantidad de detectores y de proyecciones adquiridas a diferentes ángulos, proporcionando una gran resolución espacial y calidad en rango dinámico. Tomografía por emisión de fotón único (SPECT) El principio básico para la obtención de imágenes de medicina nuclear es la detección de la actividad de una fuente de radiación (radionúclido), transportado por un fármaco, que se le administra al paciente por vía oral, intravenosa o por inhalación. Estas sustancias siguen distintas rutas de difusión y metabólicas en el organismo, de manera que son captadas específicamente por diferentes órganos y tejidos, a la vez que son capaces de emitir radiación gamma, que se detecta mediante una gamma cámara que está formada por un colimador, un detector o cristal de centelleo y un conjunto de tubos fotomultiplicadores. La mayoría de sistemas de SPECT utilizan una gamma cámara rotatoria suspendida, que puede girar alrededor del paciente, lo cual permite obtener imágenes coronales, sagitales, transversales y oblicuas de cualquier parte del cuerpo. La reconstrucción de las imágenes SPECT emplea los mismos algoritmos computacionales que la tomografía computarizada, con la diferencia que en el primero la fuente energética está dentro del sujeto y en CT la fuente para la conformación de la imagen es externa.

7
Figura 2. Representación de la adquisición de imágenes por SPECT
Alineación de imágenes
La alineación o registro de imágenes es el proceso de determinar punto por punto la correspondencia entre dos o más imágenes de una misma escena, tomadas generalmente en tiempos diferentes, desde distintas orientaciones y/o captadas por diversos tipos de equipos o sistemas. Esta es una operación realmente necesaria en muchas tareas de procesamiento y análisis de imágenes, haciendo lo posible para comparar la información de referencia, midiendo píxel por píxel las diferencias que fueron causadas por cambios en la escena. Es de especial importancia el registro de imágenes médicas, donde la información específica de cada tipo de imagen (modalidad) se combina y fusiona en una sola aumentando así, la capacidad, por parte del clínico, de mejorar su diagnóstico. Por ejemplo, un buen registro y/o fusión de una imagen de tomografía computarizada (CT) con una imagen de tomografía computarizada por emisión de positrón único (SPECT) se traduce en un aporte de información adicional de una modalidad respecto a la otra; en este caso, a la información de tipo funcional que proporciona la imagen SPECT, se le añade la información anatómica detallada disponible en la imagen obtenida por CT. En el registro de imagen, la precisión de los resultados es cuantificada por una de la medida de similitud determinada. En general, la fusión de imágenes en el ámbito hospitalario consiste en unir en el mismo soporte la información que proporcionan diferentes imágenes de un paciente provenientes de distintas modalidades. Los estudios que se pueden fusionar son tomografía computarizada (CT), imagenología por resonancia magnética (IRM), tomografía por emisión de positrones (PET), ultrasonido (US), tomografía computarizada por emisión de fotón único (SPECT), potenciales relacionados a eventos (PRES), entre otros. Cada estudio médico revela, según sus características propias, cierta información del objeto estudiado.
8
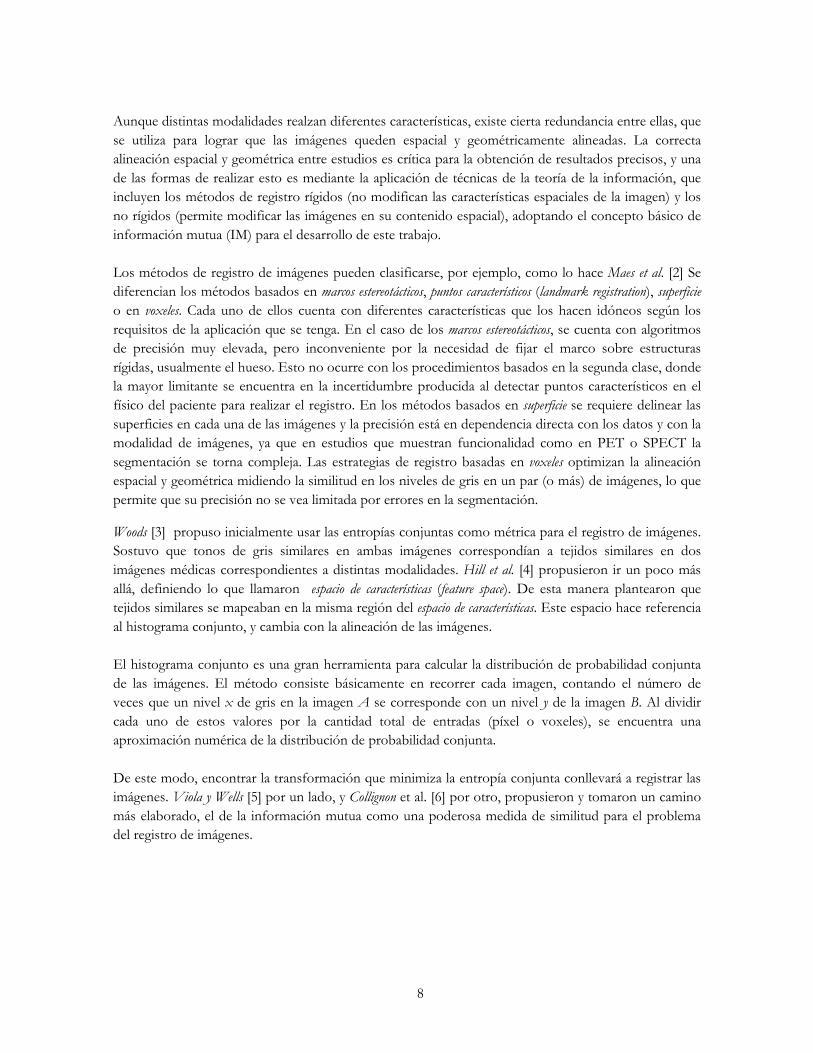
Aunque distintas modalidades realzan diferentes características, existe cierta redundancia entre ellas, que se utiliza para lograr que las imágenes queden espacial y geométricamente alineadas. La correcta alineación espacial y geométrica entre estudios es crítica para la obtención de resultados precisos, y una de las formas de realizar esto es mediante la aplicación de técnicas de la teoría de la información, que incluyen los métodos de registro rígidos (no modifican las características espaciales de la imagen) y los no rígidos (permite modificar las imágenes en su contenido espacial), adoptando el concepto básico de información mutua (IM) para el desarrollo de este trabajo. Los métodos de registro de imágenes pueden clasificarse, por ejemplo, como lo hace Maes et al. [2] Se diferencian los métodos basados en marcos estereotácticos, puntos característicos (landmark registration), superficie o en voxeles. Cada uno de ellos cuenta con diferentes características que los hacen idóneos según los requisitos de la aplicación que se tenga. En el caso de los marcos estereotácticos, se cuenta con algoritmos de precisión muy elevada, pero inconveniente por la necesidad de fijar el marco sobre estructuras rígidas, usualmente el hueso. Esto no ocurre con los procedimientos basados en la segunda clase, donde la mayor limitante se encuentra en la incertidumbre producida al detectar puntos característicos en el físico del paciente para realizar el registro. En los métodos basados en superficie se requiere delinear las superficies en cada una de las imágenes y la precisión está en dependencia directa con los datos y con la modalidad de imágenes, ya que en estudios que muestran funcionalidad como en PET o SPECT la segmentación se torna compleja. Las estrategias de registro basadas en voxeles optimizan la alineación espacial y geométrica midiendo la similitud en los niveles de gris en un par (o más) de imágenes, lo que permite que su precisión no se vea limitada por errores en la segmentación.
Woods [3] propuso inicialmente usar las entropías conjuntas como métrica para el registro de imágenes. Sostuvo que tonos de gris similares en ambas imágenes correspondían a tejidos similares en dos imágenes médicas correspondientes a distintas modalidades. Hill et al. [4] propusieron ir un poco más allá, definiendo lo que llamaron espacio de características (feature space). De esta manera plantearon que tejidos similares se mapeaban en la misma región del espacio de características. Este espacio hace referencia al histograma conjunto, y cambia con la alineación de las imágenes. El histograma conjunto es una gran herramienta para calcular la distribución de probabilidad conjunta de las imágenes. El método consiste básicamente en recorrer cada imagen, contando el número de veces que un nivel x de gris en la imagen A se corresponde con un nivel y de la imagen B. Al dividir cada uno de estos valores por la cantidad total de entradas (píxel o voxeles), se encuentra una aproximación numérica de la distribución de probabilidad conjunta. De este modo, encontrar la transformación que minimiza la entropía conjunta conllevará a registrar las imágenes. Viola y Wells [5] por un lado, y Collignon et al. [6] por otro, propusieron y tomaron un camino más elaborado, el de la información mutua como una poderosa medida de similitud para el problema del registro de imágenes.

9
Información mutua
La información mutua tiene sus orígenes en la teoría de la información, siendo una medida que cuantifica la correspondencia entre dos variables aleatorias. En el contexto del registro de imagen, las dos variables aleatorias se refieren a dos imágenes existentes registradas (A y B). Cuando las dos imágenes son superpuestas, cada par de píxeles empatados es considerado una muestra de la variable aleatoria. En las dos imágenes se representa el mismo objeto, por lo que esperaremos que las intensidades en una imagen nos revelen algo acerca de las intensidades en la otra, aunque la relación de estas intensidades no se conozca. Regresado a las variables aleatorias, si las dos están ligadas de algún modo, conociendo el valor de una variable, podríamos tener una buena idea de la otra. La mayor “unión” que hay entre las dos variables, es la mayor información mutua existente. En el caso extremo, si dos variables son idénticas, conociendo el valor de una sabremos el de la otra. Esto es análogo teniendo dos imágenes idénticas que están perfectamente alineadas. En el caso que, haya una relación uno a uno entre las intensidades en las dos imágenes, la información mutua es maximizada. En el caso general, cuando no hay mapeo uno a uno de intensidades entre las imágenes, la información mutua será maximizada en el orden en que se alineen las imágenes. Así que, se asume que no hay una relación específica entre las imágenes dadas como la correlación basada en medidas de similitud, la cual requiere una relación lineal entre las intensidades de los correspondientes píxeles y voxeles que representan el mismo punto físico. Por esta razón, la información mutua ha sido aplicada exitosamente para diversos problemas de registro de imágenes multimodales en distintas áreas. Definición
La información mutua de dos variables aleatorias, A y B, está definida por:
( ) ( ) ( )( ) ( )∑ ⋅
⋅=ba BA
BABA bpap
bapbapBAI
,
,,
,log,, (1)
donde PA(a) y PB(b) son las probabilidades marginales de la función de masa de la imagen, y PA,B(a, b) es la probabilidad conjunta de la función de masa. La información mutua determina el grado de dependencia de A y B de la medición de la distancia entre la probabilidad conjunta PA,B(a, b) y la probabilidad asociada con el caso de independencia completa PA(a) · PB(b), esto es, establece la dependencia entre dos imágenes. Si se asume que una imagen cae completamente dentro de la otra, toda transformación plausible se estimará bajo consideración, entonces la entropía marginal de la imagen más pequeña será H(B) la cual será fija, mientras que la entropía conjunta H(A, B) y la entropía marginal H(A) variaran conforme a la transformación estimada y a la superposición. En otro caso minimizar la entropía conjunta H(A, B), permitiría seleccionar una transformación estimada en la cual se encuentra una imagen superpuesta donde la entropía marginal H(A) es minimizada. Una alternativa viable en este caso es maximizar la información mutua o relacionar la entropía entre las dos imágenes. La información mutua está relacionada a las entropías de dos maneras, por:

10
( ) ( ) ( ) ( )BAHBHAHBAI ,, −+= (2)
donde H(A), H(B) y H(A,B), se definen posteriormente en las ecuaciones (5, 6 y 7). Esta definición se interpreta pensando en la información mutua como la cantidad de información que no es exclusiva de ninguna de las dos imágenes. Esto se observa ya que cuando se suman las entropías de A y B por separado, hay información compartida (o mutua, de allí proviene el término) que sobrevive cuando se resta la entropía conjunta. O mediante:
( ) ( ) ( ) ( ) ( )BAHAHABHBHBAI //, −=−= (3) En este caso puede verse que la información mutua entre dos imágenes corresponde a la incertidumbre de una de ellas menos su incertidumbre una vez conocida la otra. Es decir, es la información que aportó la segunda imagen para reducir esa incertidumbre inicial. Considerando A y B como dos imágenes, imagen flotante u objeto (F) e imagen de referencia (R) respectivamente, las entropías marginales y la entropía conjunta pueden ser calculadas como sigue:
( ) ( ) ( )fPfPFH Ff
F∑−= log (4)
( ) ( ) ( )rPrPRH Rr
R∑−= log (5)
( ) ( ) ( )rfPrfPNMH RFrf
RF ,log,, ,,
,∑−= (6)
donde PF(f) y PR(r) son las funciones de masa de probabilidad marginal y PF,R (f, r) es la función de masa de probabilidad conjunta de las dos imágenes F y R, la cual nos dice cuan a menudo los pares de valores ocurren conjuntamente. Si un valor dado de f en una modalidad delinea un volumen de materia dentro de la imagen entonces puede relacionarse a la probabilidad del valor PF(f) directamente al volumen dividido por el total del volumen representado, la más similar de las probabilidades de los valores presentan la mayor dificultad de predecir un valor y el mayor porcentaje de entropía de la imagen. Minimizando la entropía conjunta de dos imágenes, se busca una transformación donde sea más fácil predecir qué par de valores en un voxel tendrá la imagen empalmada, tratando de encontrar la superposición que contenga la mayor información, no necesariamente la información de mayor correspondencia.

11
Propiedades de la información mutua 1. La información mutua es simétrica en la teoría, aunque por cuestiones inherentes a la implementación (interpolaciones, truncamientos, etc.), esto puede no resultar así en la práctica. 2. La información que contiene una imagen acerca de ella misma es su propia información. 3. La información que contiene una imagen acerca de la otra, nunca puede superar la propia información de ella misma. 4. La incertidumbre de una imagen no puede verse incrementada al conocer la otra. 5. Cuando las imágenes no tienen relación alguna, nada novedoso se obtiene de una imagen conociendo la otra. Variantes de la información mutua
A pesar de que la información mutua es una medida de similitud poderosa, no es una medida independiente de la superposición, lo que limita su potencial. Normalización de la Información Mutua
Se ha reportado que en ocasiones la información mutua no se decrementa con la no alineación, sino que por el contrario, podría llegar a incrementarse. Esto ocurre debido a eventuales solapamientos de regiones del fondo haciendo que las entropías marginales crezcan más rápido que el decrecimiento de la entropía conjunta, ocasionando falsos registros. Studholme et al. [7] plantearon entonces la introducción de la medida normalizada de la información mutua. Además, para proporcionar una superposición invariante necesitamos una medida independiente de los cambios de las entropías marginales H(F) y H(R) de las dos imágenes en la región de unificación. Un acercamiento directo a la normalización, es evaluar en porcentaje las entropías marginal y conjunta,
( ) ( ) ( )( )RFH
RHFHRFY
,,
+= (7)
( ) ( )ABIBAI ,, =
( ) ( )AHAAI =,
( ) ( ) ( ) ( )BHBAIAHBAI ≤≤ ,,,
( ) 0, ≥BAI
( ) BdenteindependieABAI ⇔= 0,

12
donde H(F), H(R) y H(F, R) son las entropía definidas en las ecuaciones (4) a (6). Aquí cualquier cambio en la incertidumbre de los valores de la imagen y de las entropías marginales no resultará en un cambio en la medida de alineación. La maximización de Y(F, R) busca una transformación donde la entropía conjunta es minimizada con respecto a las entropías marginales. Coeficiente de correlación de entropía
Una conocida crítica del método está enfocada en que como se usa comúnmente, la información mutua no toma en cuenta la dependencia de los voxeles del entorno. Aunque la entropía de Shannon [8] originalmente toma en cuenta esto, en la práctica se trabaja usualmente bajo la hipótesis de independencia de los vecinos. La definición del coeficiente de correlación de entropía es:
( ) ( )( ) ( )RHFH
RFIRFECC
+⋅= ,2
, (8)
donde I(F, R) es la medida de información mutua definida en la ecuación (3). Puede ser mostrada que esta medida es equivalente a la información mutua normalizada definida en la ecuación (6) mediante la siguiente relación:
( ) ( )BAYBAECC
,
22, −= (9)
La mayor propiedad del coeficiente de correlación de entropía es que su valor está siempre entre cero y uno. Ponderación de la Información Mutua La definición de la ponderación de la información mutua es:
( )0
sup,
A
ARFI
erpuestaW = (10)
donde Asuperpuesta es el área de superposición de las imágenes F, R y A0 es el área de la más pequeña de dichas imágenes. Pasos para el registro de imágenes
En la bibliografía existen diversas clasificaciones de los diferentes atributos que se consideran al momento del registro de imágenes por maximización de la información mutua; pero se mencionará únicamente uno, el cual se subdivide principalmente según los aspectos que sean concernientes al método o a la aplicación. Maintz y Viergever [2] separan una gran clase que titulan “método”. Allí se distinguen otras cuatro subclases aún menores, que son el preprocesamiento, la medida, la transformación, y la implementación. La primera refiere a todos los aspectos previos al registro que permiten realzar

13
ciertas características mediante el filtrado de ruido, o el calibrado de resoluciones. También se corrigen in-homogeneidades en la iluminación, etc. La medida se basa, evidentemente, en información mutua. Dentro de esta clase hay una puntualización muy importante: se ha reportado que en ocasiones la información mutua no se disminuye con la no alineación, sino que por el contrario, podría llegar a incrementarse. Esto ocurre debido a eventuales solapamientos de regiones del fondo haciendo que las entropías marginales crezcan más rápido que el decremento de la entropía conjunta, ocasionando falsos registros. Studholme et al. [7] plantearon entonces la introducción de la medida normalizada de la información mutua (NMI).
La información espacial también entra dentro de esta categoría. Una conocida crítica del método está enfocada en como se usa comúnmente, la información mutua no toma en cuenta la dependencia de los voxeles del entorno. Aunque la entropía de Shannon [7] originalmente toma en cuenta esto, en la práctica se trabaja usualmente bajo la hipótesis de independencia de los vecinos. En lo que refiere a las transformaciones, se distinguen tres tipos. Las rígidas, en las cuales no se modifican las dimensiones ni los ángulos de los objetos. Típicamente se encasillan en este grupo la rotación, la traslación, etc. Las transformaciones afines, permiten cambios en las dimensiones, y un ejemplo de ello es las funciones de cambio de escala. Y las curvas, son transformaciones más complejas, ya que se hacen localmente. Dentro de la implementación aparecen temas fundamentales como los algoritmos de interpolación a elegir, la estimación de las distribuciones de probabilidad y lo concerniente a la optimización. En el primero de los casos hay que evaluar el compromiso que existe entre precisión y tiempo de procesamiento. Es importante notar que una interpolación de mayor orden puede evitar la pérdida de información, pero disminuirá muchísimo la velocidad del algoritmo. En la estimación de probabilidades la forma más directa es aplicar lo dicho antes, el histograma conjunto. La optimización es un paso muy importante también, aunque no fácil. Se busca minimizar una función de n variables, siendo n la cantidad de grados de libertad que tiene la transformación que conduce al registro de la imagen, y esta función no suele ser muy regular, sino que por el contrario, presenta muchos extremos locales (máximos o mínimos según sea el caso). Ardeshir Goshtasby [8], plantea un procedimiento análogo al sugerido en los párrafos anteriores, que nos sugiere que dadas dos imágenes de una escena, se realicen los siguientes pasos para su registro: 1. Preprocesamiento: Comprende la preparación de las imágenes para la selección y correspondencia de características usando métodos como el ajuste de escala, eliminar el ruido y la segmentación. Cuando el tamaño de los píxeles en las imágenes que son registradas es diferente pero conocido, una imagen es remuestreada para la escala de la otra imagen. 2. Selección de características: Para el registro de dos imágenes, un número de características es seleccionado en las imágenes y la correspondencia es establecida entre estas. Conociendo las correspondencias, una función de transformación es encontrada para remuestrear la imagen objeto en la geometría de la imagen de referencia. Las características usadas en el registro de la imagen son vértices, líneas, curvas, patrones, regiones y segmentos.

14
3. Correspondencia de características: Esta puede llevarse a cabo seleccionando cualquier característica en la imagen de referencia, buscando estas en la imagen objeto, o bien, seleccionando características en ambas imágenes independientemente y, entonces, determinar la correspondencia entre estas. El primer método es elegir cuándo las características contienen información considerable, por ejemplo regiones o patrones. El método que le sigue es usar características individuales, por ejemplo puntos y líneas, que no contienen información suficiente. Si las características no tienen puntos, es importante que de cada par de características correspondientes al menos un par de puntos se determinen. Las coordenadas de los puntos de correspondencia son usadas para establecer los parámetros de transformación. 4. Determinar una función de transformación: Conociendo las coordenadas de un conjunto de puntos correspondientes en las imágenes, una función de transformación es determinada para remuestrear la imagen objeto a la geometría de la imagen de referencia. El tipo de función de transformación utilizada debe depender del tipo de diferencias geométricas entre las imágenes. Si las diferencias geométricas entre las imágenes no es conocida, puede emplearse una transformación que pueda adaptarse fácilmente a las diferencias geométricas entre las imágenes. Modelo de transformación geométrica
El modelo de transformación geométrica más simple es el de transformación de cuerpo rígido, el cual es frecuentemente suficiente para alinear dos conjuntos de imágenes. Una transformación de cuerpo rígido consiste de cuatro parámetros: translación en direcciones x-y y rotaciones alrededor de los ejes x y/o y. El escalamieto no se incluye porque, por lo general, es conocido a priori. Las translaciones pueden realizarse por la adición de vectores, mientras las rotaciones son implementadas mediante la multiplicación de matrices. Se pueden trasladar puntos en el plano x-y añadiendo cierta cantidad a los puntos coordenados. Para que cada punto P(x, y) sea desplazado dx unidades paralelas al eje x y dy unidades paralelas al eje y, para el nuevo punto P(x’, y’), se define:
x’ = x + dx y’ = y + dy (11)
Que como vector columna se escribe:
… (12)
Podríamos trasladar un objeto empleando la ecuación (7) a todos los puntos del objeto, ya que cada línea en un objeto está constituida de un número infinito de puntos. Los puntos pueden ser escalados por sx y sy a lo largo del eje x y del eje y, respectivamente, a puntos nuevos por las siguientes multiplicaciones:
x’ = sx * x y’ = sy * y (13)
=
=
=
y
x
d
dT
y
xP
y
xP ,
'
'',

15
En forma matricial es:
(14) donde S es la matriz de escalamiento. Los factores de escalamiento pueden ser diferentes, sx ≠ sy (escalado diferencial) o iguales, sx = sy, (escalado uniforme), donde las proporciones no son afectadas. Los puntos pueden ser rotados por un ángulo θ alrededor del origen. Una rotación es definida matemáticamente por:
… (15) En forma matricial, tenemos: … (16) donde R es la matriz de rotación. Ángulos positivos se miden en sentido de las manecillas del reloj de x hacia y. Para ángulos negativos, las identidades cos(-θ) = cos ) y sen(-θ) = -sen θ pueden ser utilizadas para modificar las ecuaciones (15) y (16).
Coordenadas homogéneas y representación matricial de transformaciones bidimensionales [9] La representación matricial para la traslación, el escalamiento y la rotación son, respectivamente,
(17) Como se pude apreciar la traslación es tratada diferente (como una adición) al escalamiento y a la rotación (como una multiplicación), pero es deseable poder tratar las tres transformaciones de forma consistente, de tal manera que se puedan combinar fácilmente. Si expresamos los puntos en coordenadas homogéneas, dichas transformaciones se pueden manejar como multiplicaciones. En coordenadas homogéneas, agregamos una tercera coordenada al punto. En vez de representar por un par de números (x, y), cada punto es representado por un triplete (x, y, w). Al mismo tiempo, dos conjuntos de coordenadas homogéneas (x, y, w) y (x’, y’, w’) representan el mismo punto si y sólo si uno es un múltiplo del otro. Si la coordenada w es diferente de cero, se puede dividir entre esta: (x, y, w) representando el mismo punto como (x/w, y/w, 1), ésta división se hace normalmente, y los números x/w y y/w se denominan coordenadas cartesianas del punto homogéneo.
.'
,'
,'
PRP
PSP
PTP
⋅=⋅=+=
PRPoy
x
sen
sen
y
x⋅=
⋅
−=
'
cos
cos
'
'
θθθθ
PSPoy
x
s
s
y
x
y
x ⋅=
⋅
=
'
0
0
'
'
θθθθ
cos'
cos'
yxseny
ysenxx
+−=−=

16
Cada punto homogéneo representa una línea en el espacio tridimensional. Si se homogeneiza el punto (dividiendo entre w), se obtiene un punto de la forma (x, y, 1), que forma el plano definido por la ecuación w 0 1 en el espacio (x, y, 1). A continuación se presenta la forma matricial para las coordenadas homogéneas
(18)
Las matrices pueden ser transpuestas para pasar de una convención a otra, tal como los vectores renglón y columna son transpuestos:
.. (19) ésta ecuación puede ser expresada como:
, (20) donde
.. … (21) Si un punto P es trasladado por T(dx1, dy1 ) a P’ y éste es trasladado por T(dx2, dy2 ) a P’’:
(22) sustituyendo P’ en P’’ se obtiene:
(23) El producto matricial ( ) ( )1122 ,, yxyx ddTddT ⋅ es:
. (24)
La traslación neta es en efecto ( )2121 , yyxx ddddT ++ . El producto matricial es variadamente remitido
como la composición, concatenación o el compuesto de ( )11, yx ddT y ( )22, yx ddT
.
⋅
=
1100
10
01
1
'
'
y
x
d
d
y
x
y
x
( ) TTT PMMP ⋅=⋅
( ) PddTP yx ⋅= ,'
( ) .
100
10
01
,
= y
x
yx d
d
ddT
( )( ) ',''
,,'
22
11
PddTP
PddTP
yx
yx
⋅=
⋅=
( ) ( ) ( ) ( )( ) PddTddTPddTddTP yxyxyxyx ⋅⋅=⋅⋅= 11221122 ,,),(,''
++
=
⋅
100
10
01
100
10
01
100
10
01
21
21
2
2
1
1
yy
xx
y
x
y
x
dd
dd
d
d
d
d

17
La ecuación de escalamiento está representada en forma matricial como:
. (25)
Si se define , (26) tenemos
(27) Al igual que una traslación sucesiva es aditiva, es de esperarse que el escalamiento sucesivo sea multiplicativo. Dando
(28) sustituyendo P’ en P’’ se encuentra que:
(29) El producto matricial es:
. (30) Finalmente, la ecuación de rotación puede ser representada como:
…………………....(31) Entonces , (32)
así que tenemos
………...(33)
⋅
=
1100
00
00
1
'
'
y
x
s
s
y
x
y
x
( )
=100
00
00
, y
x
yx s
s
ssS
( ) PddSP yx ⋅= ,'
( )( ) ',''
,,'
22
11
PssSP
PssSP
yx
yx
⋅=
⋅=
( ) ( ) ( ) ( )( ) PssSssSPssSssSP yxyxyxyx ⋅⋅=⋅⋅= 11221122 ,,),(,''
⋅⋅
=
⋅
100
00
00
100
00
00
100
00
00
21
21
2
2
1
1
yy
xx
y
x
y
x
ss
ss
s
s
s
s
( ) ( )( ) ( )
∗
−=
1100
0cos
0cos
1
'
'
y
x
sen
sen
y
x
θθθθ
( )( ) ( )( ) ( )
−=100
0cos
0cos
θθθθ
θ sen
sen
R
( ) PRP ⋅= θ'
( ) ( )1122 ,, yxyx ssSssS ⋅

18
En la submatriz superior izquierda de 2x2 de la ecuación de R(θ), considerando cada uno de los dos renglones como vectores, se pueden observar tres propiedades:
1. Cada uno es un vector unitario
2. Cada uno es perpendicular a el otro (su producto punto es cero)
3. El primer y segundo vector serán rotados por R(θ) situándose en el eje positivo de x y y, respectivamente (en presencia de las condiciones 1 y 2, esto es equivalente a y que la submatriz tenga un determinante igual a 1).
Las primeras dos propiedades también son verdad para las columnas de la submatriz de 2x2. Las dos direcciones de estas están dentro de los vectores que están rotando a lo largo de los ejes positivos x y y. Una matriz de transformación de la forma:
………......(34)
la submatriz superior de 2x2 es ortogonal, preservando los ángulos y las distancias. Estas transformaciones se denominan de cuerpo rígido, pues el cuerpo u objeto a transformar no es distorsionado en ningún aspecto. Una secuencia arbitraria de matrices de rotación y traslación produce una matriz de esta forma. El producto de una secuencia arbitraria de matrices de rotación, traslación y escalamiento, (transformaciones afines), tienen la propiedad de preservar el paralelismo de las líneas, pero no las distancias y ángulos. Operaciones lejanas de rotación, escalamiento y traslación no provocarán líneas paralelas. R(θ), S(sx, sy) y T(dx,dy) también son afines. Las transformaciones de cizalla también son afines. Existen dos clases de transformaciones de cizalla: una a lo largo del eje x y una a lo largo del eje y. La operación es representada por la matriz
………...(35)
El término a en la matriz de cizalla es una constante de proporcionalidad. Advirtiendo que el producto SHx[x y 1 T] es [x+a y y 1] T, demostrando claramente que el cambio proporcional en x es una función de y. Similarmente, la matriz de cizalla a lo largo del eje y
… (36)
1002221
1211
y
x
trr
trr
=100
010
01 a
SH x
=100
01
001
bSH y

19
Espacios de color
En el sistema de coordenadas de color RGB los objetos son descritos por sus proporciones de rojo (R), verde (G) y azul (B) (colores primarios). Cuando se utiliza este sistema, un problema frecuente es la tendencia de la imagen hacia los tonos grises o pastel, como consecuencia del nivel similar de reflectancia que presentan muchas cubiertas en diferentes bandas. Una alternativa a la representación del color mediante sus componentes RGB consiste en representarlo mediante sus propiedades: Tono o matiz, Saturación e Intensidad (HSI, Hue, Saturation, Intensity), que describen las sensaciones subjetivas de brillo, color y pureza del color y que es útil para combinar imágenes adquiridas por distintos sistemas.
El tono procede de la longitud de onda en donde se produce la máxima reflectividad del objeto: equivale al color que aprecian nuestros ojos. La saturación se refiere a la pureza de dicho color, su grado de mezcla con los otros colores primarios. Por último, la intensidad puede identificarse como el brillo, en función del porcentaje de reflectividad recibido.
Es posible transformar las coordenadas de la imagen de los colores primarios (RGB) a las propiedades del color (HSI) mediante diferentes algoritmos de conversión.
El proceso consiste en trasformar las coordenadas de la imagen de los colores primarios RGB a las propiedades del color HSI, Chuvieco [13]; dicho de otra forma, se trata de extraer tres nuevas bandas basadas en el sistema de coordenadas de color HSI y realizar una composición coloreada con ellas, Pinilla [14].
Esta transformación se puede utilizar para lograr aprovechar en una única imagen la alta resolución espacial de una imagen pancromática con la alta resolución espectral de una imagen multiespectral. Para ello ambas imágenes deberán superponerse con precisión. La composición coloreada de la imagen multiespectral se transforma a los componentes HSI y se sustituye la I por el canal pancromático.
El tono y la saturación se relacionan con el contenido espectral de la imagen, mientras que la intensidad se relaciona con el contenido espacial, por lo que basta sustituir este último componente por la imagen pancromática. Finalmente se aplica la transformación inversa, de componentes HSI a RGB, obteniéndose un producto visual muy mejorado.
En la fusión de datos o imágenes adquiridos(as) por distintos sensores o sistemas se han de realizar dos tareas diferenciadas, Vivas [15]: la combinación geométrica de los distintos conjuntos de datos digitales que se han de superponer y la obtención de las tres bandas sintéticas que nos proporcionen el color RGB (generalmente la transformación HSI).
En el sistema de coordenadas de la imagen RGB, cada píxel puede representarse en un diagrama tridimensional (correspondiente a los tres colores primarios: rojo, verde, azul). En el sistema HSI, cada píxel puede representarse por un cono doble, donde la base sería el tono, el eje vertical o altura representa la intensidad y el radio la saturación.

20
Figura 3. Espacio RGB Figura 4. Espacio HSI
La transformación del espacio RGB a HSI, obedece las siguientes ecuaciones:
3
BGRI
++= , intensidad, definida en el intervalo [0, 255].
( )( ) ( )
−+−−⋅
=BRGR
BGarctgH
3, tono, valores entre -180º y 180º.
( )I
BGRS
,,min1−= , saturación, toma valores entre 0 y 1.
21
CAPÍTULO II
METODOLOGÍA
Examinado el problema, se realizó una búsqueda bibliográfica para conocer los métodos más comunes que se utilizan para llevar a cabo la alineación de las imágenes, seleccionando uno de los más analizados y recomendados por los estudiosos del tema. Concluida la investigación, se optó por realizar el alineamiento por registro rígido de las imágenes CT y SPECT, utilizando como medida de similitud la información mutua, siguiendo un procedimiento análogo a los recomendados en la literatura consultada; el preprocesamiento consistió en lo siguiente:
• Las imágenes DICOM se abrieron con el visor ezdicom [16], para guardarlas en formato JPG, y en el caso de las imágenes de SPECT, además, ponerle una paleta de colores.
• Con un visor de imágenes común, se submuestrearon las imágenes CT, de 512x512, para que coincidieran con el tamaño de las de SPECT, de 128x128.
• Posteriormente, para realizar la alineación, en Matlab se convirtieron a niveles de gris (para manejar una capa) mediante la instrucción rgb2gray.
• Por último, las imágenes de CT fueron escaladas individualmente con un factor de 0.4, utilizando la matriz correspondiente de coordenadas homogéneas, con la finalidad de que el área del cerebro tuviera un tamaño parecido a las de SPECT y lograr una mejor alineación. Esto para el caso de los estudios del adulto sano; para las imágenes del neonato se tuvo que variar dicho factor, como sigue: par 18-18 fue de 0.4, 12-7 de 0.54, 22-20 de 0.34, tal y como se encuentran en el anexo C.
Cabe mencionar, que también nos dimos a la tarea de buscar en internet una aplicación que ayudara a cumplir el objetivo de este proyecto, ya que al momento de hacer las implementaciones de los algoritmos desarrollados, el tiempo de ejecución era demasiado. Ya encontrados [17], se realizó un análisis, para comprender su funcionamiento y hacer las modificaciones pertinentes, para nuestros propósitos. En la sección que sigue únicamente se muestran los algoritmos utilizados; sin embargo, es importante mencionar que se elaboraron y probaron otros más. Algoritmos Se desarrollaron los siguientes algoritmos de funciones que, posteriormente, se implementaron en Matlab, cuyo código puede consultarse en el anexo A.
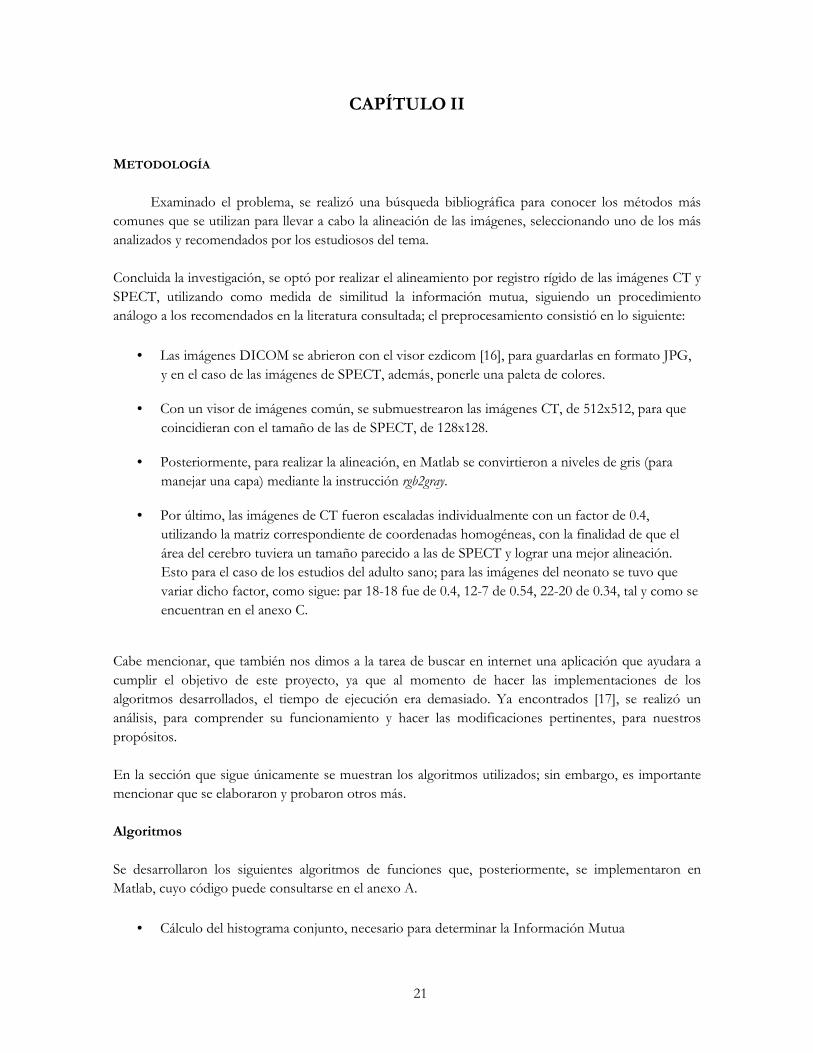
• Cálculo del histograma conjunto, necesario para determinar la Información Mutua
22
% A partir de dos imágenes de igual tamaño, se obtiene el histograma conjunto Función: joint_h (image_1, image_2) rows ← tamaño (image_1) cols ← tamaño (image_1) N ← 256 h ← [N, N] Para i desde 1 hasta rows
Para j desde 1 hasta cols h (image_1 (i, j)+1, image_2 (i, j)+1) ← h(image_1 (i, j)+1, image_2 (i, j)+1)+1
Termina Termina
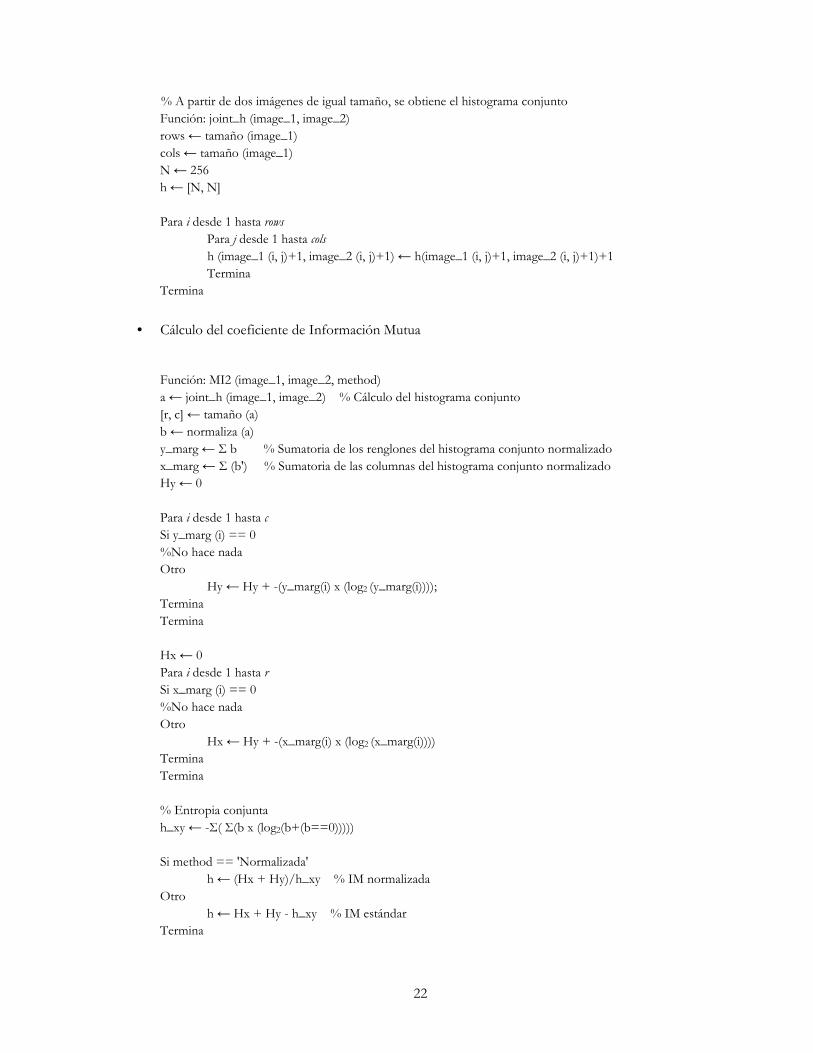
• Cálculo del coeficiente de Información Mutua
Función: MI2 (image_1, image_2, method) a ← joint_h (image_1, image_2) % Cálculo del histograma conjunto [r, c] ← tamaño (a) b ← normaliza (a) y_marg ← Σ b % Sumatoria de los renglones del histograma conjunto normalizado x_marg ← Σ (b') % Sumatoria de las columnas del histograma conjunto normalizado Hy ← 0 Para i desde 1 hasta c Si y_marg (i) == 0 %No hace nada Otro
Hy ← Hy + -(y_marg(i) x (log2 (y_marg(i)))); Termina Termina Hx ← 0 Para i desde 1 hasta r Si x_marg (i) == 0 %No hace nada Otro
Hx ← Hy + -(x_marg(i) x (log2 (x_marg(i)))) Termina Termina % Entropia conjunta h_xy ← -Σ( Σ(b x (log2(b+(b==0))))) Si method == 'Normalizada'
h ← (Hx + Hy)/h_xy % IM normalizada Otro
h ← Hx + Hy - h_xy % IM estándar Termina

23
• Alineación de imágenes, en base a la Información Mutua
% Se cargan las imágenes y se especifica el ángulo, que puede ser un valor o un intervalo, y el paso para la traslación en x, y Función: registroMod2 (im1, im2, [ángulo], paso) [m, n] ← tamaño (im1) [p, q] ← tamaño (im2) [a, b] ← tamaño (ángulo) Desplegar cuadro de diálogo: ¿Qué método quiere usara? ‘Normalizada’ ‘Estándar’ % Se selecciona el método de IM (normalizada o estándar) Recortar la ROI (región de interés) [sub_J, rect_J] ← ROI % Creación del arreglo h Para k desde 1 hasta b J ← rota sub_J con ángulo k [m1, n1] ← tamaño (redondear(J))
Para i desde 1 hasta (m-m1) Para j desde 1 hasta (n-n1) img2 ← [tamaño (im1)] img2 (i: (i+m1-1), j: (j+n1-1)) ← im21 (1: m1,1: n1) img2 ← redondea (img2) h (k, i, j) ← MI2(im1, img2, method) Termina
Termina Termina [a, b] ← máximo de todos los elementos del arreglo (h) % Da el máximo coeficiente de IM y da los parámetros correspondientes
• Transformaciones geométricas para alinear la imagen objeto original
Función: alineaim2 (im11, im22, rect_J, I, J, theta) %Recibe los parámetros obtenidos en RegMod2 [m, n] ← tamaño (im1) [p, q] ← tamaño (im2) enx ← máximo (m,p) eny ← máximo (n,q) soporte ← [2enx, 2eny] x 255 xmin ← rect_J(1) ymin ← rect_J(2) width ← rect_J(3) height ← rect_J(4) %Centroide de im2 cxim2 ← xmin+ redondea (width/2) cyim2 ← ymin+ redondea (height/2)
24
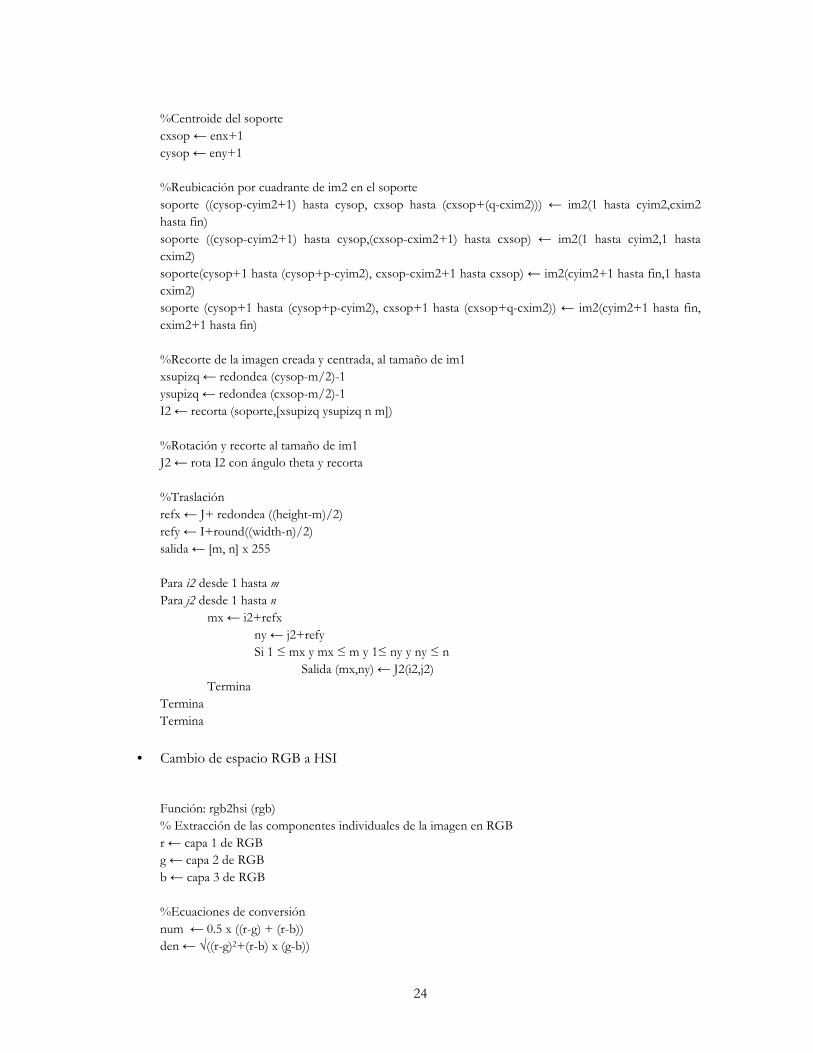
%Centroide del soporte cxsop ← enx+1 cysop ← eny+1 %Reubicación por cuadrante de im2 en el soporte soporte ((cysop-cyim2+1) hasta cysop, cxsop hasta (cxsop+(q-cxim2))) ← im2(1 hasta cyim2,cxim2 hasta fin) soporte ((cysop-cyim2+1) hasta cysop,(cxsop-cxim2+1) hasta cxsop) ← im2(1 hasta cyim2,1 hasta cxim2) soporte(cysop+1 hasta (cysop+p-cyim2), cxsop-cxim2+1 hasta cxsop) ← im2(cyim2+1 hasta fin,1 hasta cxim2) soporte (cysop+1 hasta (cysop+p-cyim2), cxsop+1 hasta (cxsop+q-cxim2)) ← im2(cyim2+1 hasta fin, cxim2+1 hasta fin) %Recorte de la imagen creada y centrada, al tamaño de im1 xsupizq ← redondea (cysop-m/2)-1 ysupizq ← redondea (cxsop-m/2)-1 I2 ← recorta (soporte,[xsupizq ysupizq n m]) %Rotación y recorte al tamaño de im1 J2 ← rota I2 con ángulo theta y recorta %Traslación refx ← J+ redondea ((height-m)/2) refy ← I+round((width-n)/2) salida ← [m, n] x 255 Para i2 desde 1 hasta m Para j2 desde 1 hasta n mx ← i2+refx ny ← j2+refy Si 1 ≤ mx y mx ≤ m y 1≤ ny y ny ≤ n Salida (mx,ny) ← J2(i2,j2) Termina Termina Termina
• Cambio de espacio RGB a HSI
Función: rgb2hsi (rgb) % Extracción de las componentes individuales de la imagen en RGB r ← capa 1 de RGB g ← capa 2 de RGB b ← capa 3 de RGB %Ecuaciones de conversión num ← 0.5 x ((r-g) + (r-b)) den ← √((r-g)2+(r-b) x (g-b))
25
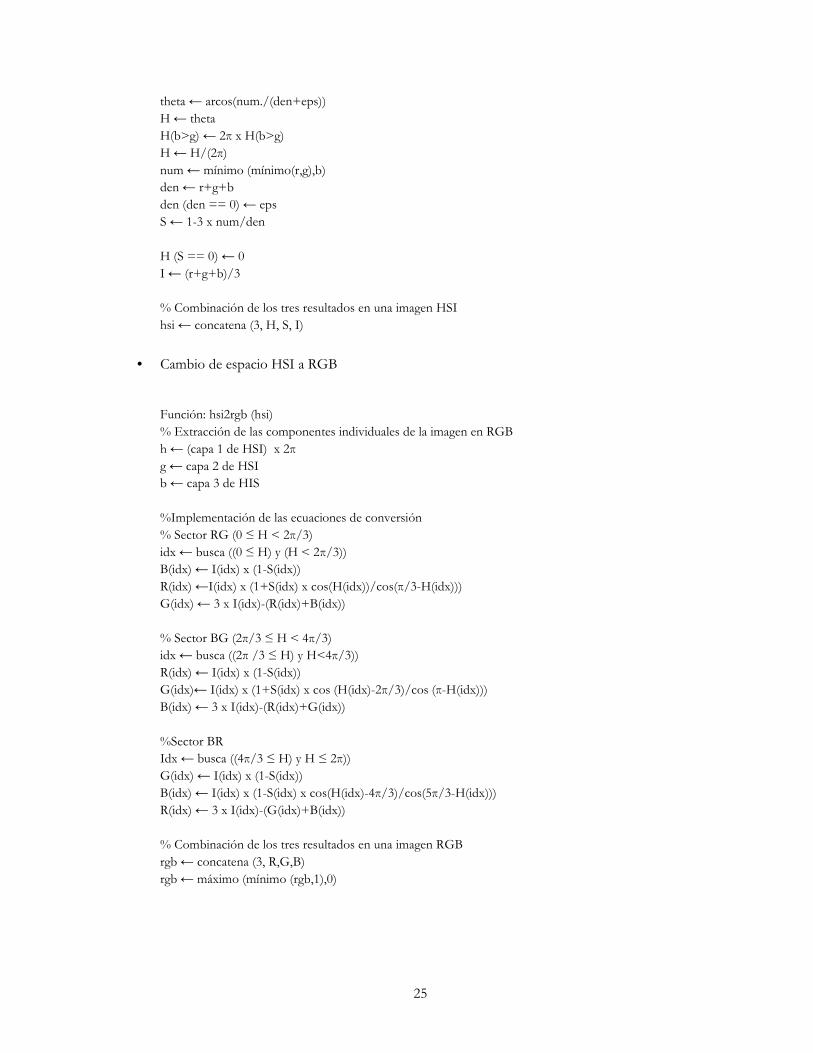
theta ← arcos(num./(den+eps)) H ← theta H(b>g) ← 2π x H(b>g) H ← H/(2π) num ← mínimo (mínimo(r,g),b) den ← r+g+b den (den == 0) ← eps S ← 1-3 x num/den H (S == 0) ← 0 I ← (r+g+b)/3 % Combinación de los tres resultados en una imagen HSI hsi ← concatena (3, H, S, I)
• Cambio de espacio HSI a RGB
Función: hsi2rgb (hsi) % Extracción de las componentes individuales de la imagen en RGB h ← (capa 1 de HSI) x 2π g ← capa 2 de HSI b ← capa 3 de HIS %Implementación de las ecuaciones de conversión % Sector RG (0 ≤ H < 2π/3) idx ← busca ((0 ≤ H) y (H < 2π/3)) B(idx) ← I(idx) x (1-S(idx)) R(idx) ←I(idx) x (1+S(idx) x cos(H(idx))/cos(π/3-H(idx))) G(idx) ← 3 x I(idx)-(R(idx)+B(idx)) % Sector BG (2π/3 ≤ H < 4π/3) idx ← busca ((2π /3 ≤ H) y H<4π/3)) R(idx) ← I(idx) x (1-S(idx)) G(idx)← I(idx) x (1+S(idx) x cos (H(idx)-2π/3)/cos (π-H(idx))) B(idx) ← 3 x I(idx)-(R(idx)+G(idx)) %Sector BR Idx ← busca ((4π/3 ≤ H) y H ≤ 2π)) G(idx) ← I(idx) x (1-S(idx)) B(idx) ← I(idx) x (1-S(idx) x cos(H(idx)-4π/3)/cos(5π/3-H(idx))) R(idx) ← 3 x I(idx)-(G(idx)+B(idx)) % Combinación de los tres resultados en una imagen RGB rgb ← concatena (3, R,G,B) rgb ← máximo (mínimo (rgb,1),0)

26
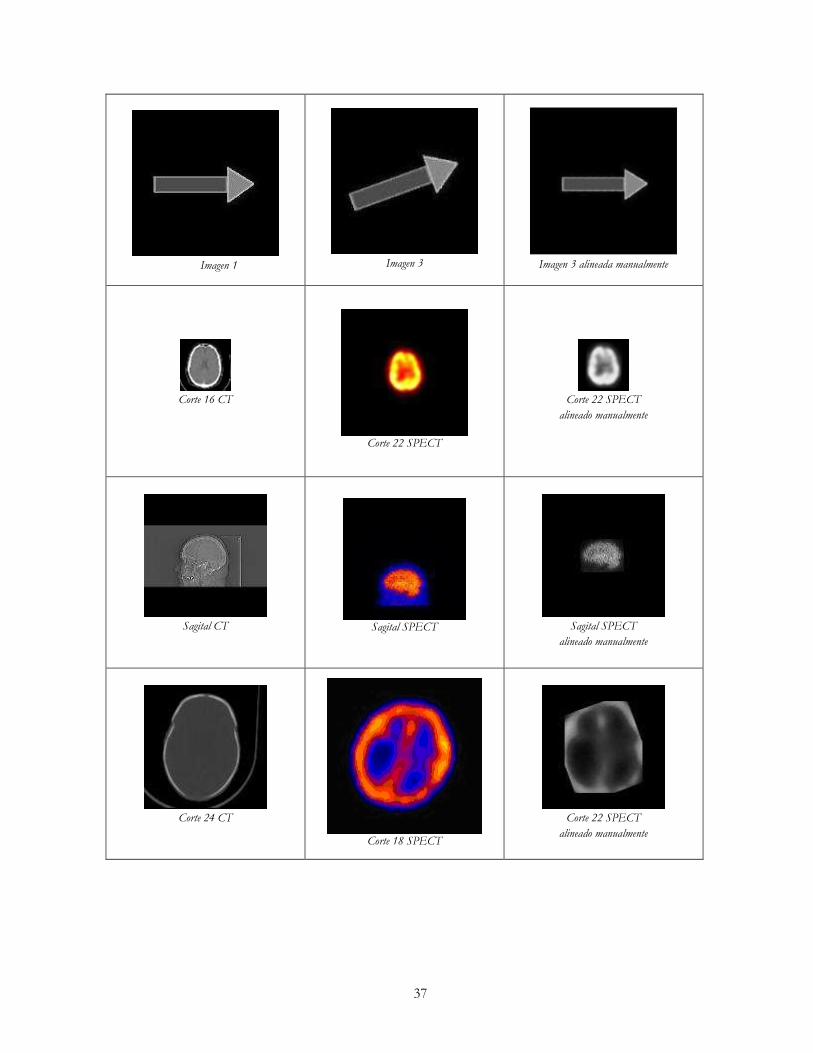
Pruebas de funcionamiento Para corroborar que las funciones implementadas realizaran adecuadamente los cálculos y, por ende, la alineación, se efectuaron pruebas con una imagen sintética de una flecha creada en Paint, de 185x185 (Imagen 1), que posteriormente fue modificada con parámetros conocidos (trasladada 20 píxeles en x, y (Imagen 2) y rotada 20° (Imagen 3)).
Imagen 1
Imagen 2
Imagen 3
Además, se empleó una imagen real que se alineó consigo misma, para verificar que tan confiables son dichas implementaciones y, en dado caso, obtener el margen de error.
• Cálculo del histograma conjunto

27
Nota: Con el propósito de tener una mejor visualización, se le asignó una paleta de color y el rango dinámico de este histograma fue comprimido mediante la ecuación
( )rcS +∗= 1log
donde c es una constante a la que le establecimos un valor de 100 r es el nivel de gris de cada píxel de la imagen original S es el valor del nuevo nivel de gris Los valores de información mutua obtenidos en este caso fueron los esperados, esto es, en el caso de la normalizada resultó de 2 y en la estándar de 1. Selección de pares de imágenes CT-SPECT Esta selección se llevó acabo observando las imágenes y tratando de identificar similitudes entre ellas, pues el orden de los cortes no asegura que entre uno y otro estudio (CT y SPECT), se encuentren a la misma altura. Equipos empleados para la adquisición de las imágenes:
Figura 5. Somatom Emotion6 de Siemens
Figura 6. e.cam duet de Siemens
Los pares defendidos se muestran en el anexo B.

28
CAPÍTULO III
RESULTADOS
En este capítulo se presenta un par de ejemplos detallados de la alineación obtenida al utilizar las implementaciones en Matlab de los algoritmos descritos anteriormente. De estos ejemplos, uno incluye los pasos seguidos para fusionar la imagen de CT con la SPECT. Asimismo, contiene tablas donde se exhiben los valores de traslación, rotación y coeficiente de Información Mutua, obtenidos al hacer la alineación. Ejemplo 1
Preprocesamiento Como se mencionó en el capítulo anterior, para realizar el alineamiento de los pares de imágenes seleccionados fueron preprocesados, según se muestra a continuación.
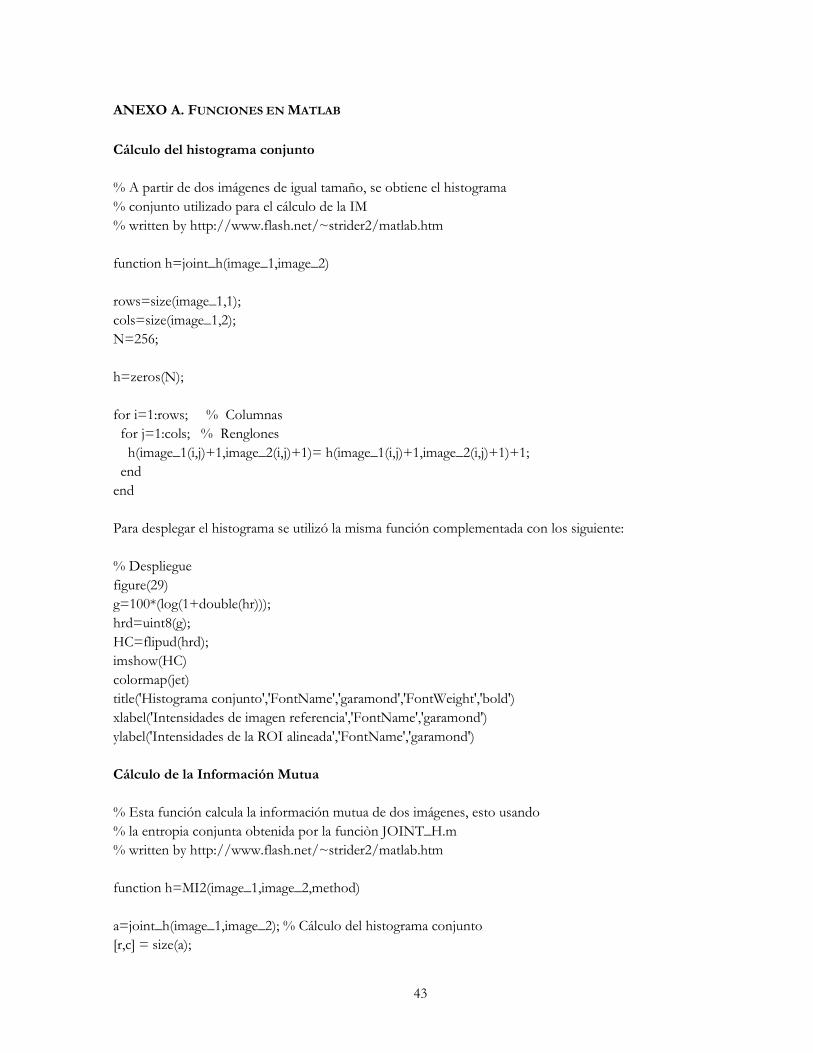
Corte 16 CT
Corte 22 SPECT
Imágenes originales
Imágenes preprocesadas
Como se puede apreciar, la imagen del corte 16 de la CT fue escalada con un factor de 0.4 para que el área de interés, que en nuestro caso es el cerebro, coincidiera en tamaño con la del SPECT (corte 22). Ambas fueron pasadas a escala de grises, para que al momento de hacer la alineación se manejara solo una capa y el manejo de información fuera más sencillo.
29
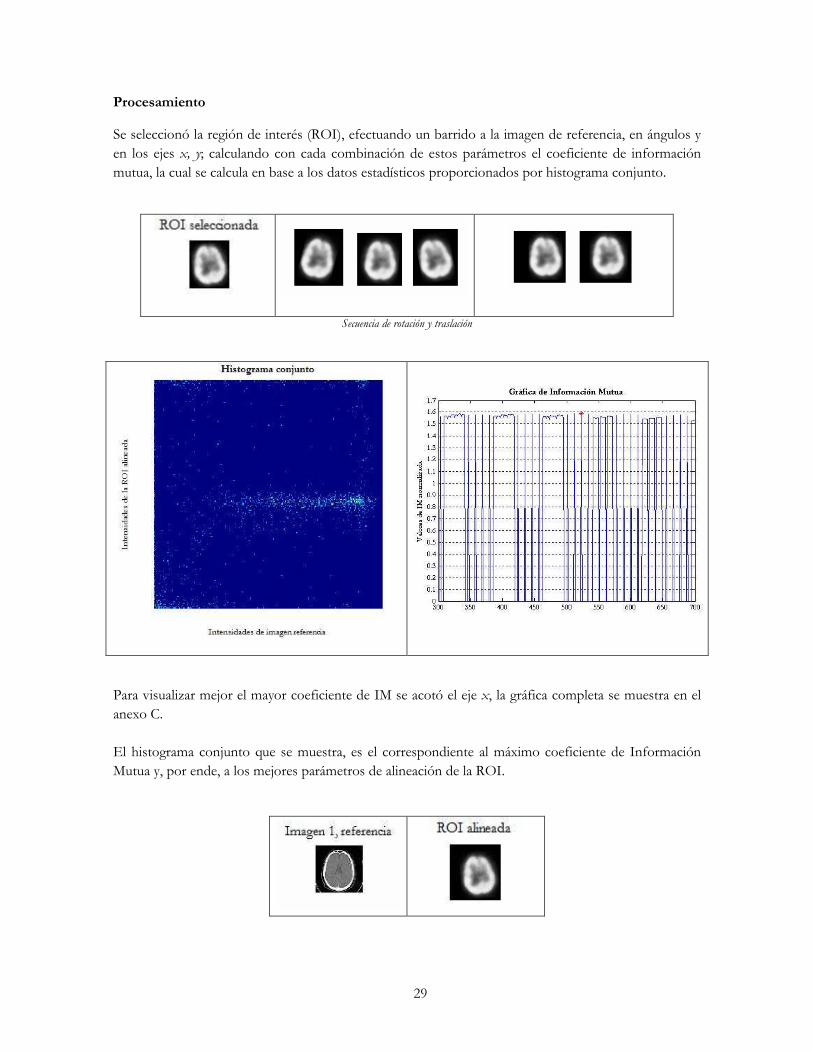
Procesamiento
Se seleccionó la región de interés (ROI), efectuando un barrido a la imagen de referencia, en ángulos y en los ejes x, y; calculando con cada combinación de estos parámetros el coeficiente de información mutua, la cual se calcula en base a los datos estadísticos proporcionados por histograma conjunto.
Secuencia de rotación y traslación
Para visualizar mejor el mayor coeficiente de IM se acotó el eje x, la gráfica completa se muestra en el anexo C. El histograma conjunto que se muestra, es el correspondiente al máximo coeficiente de Información Mutua y, por ende, a los mejores parámetros de alineación de la ROI.
30
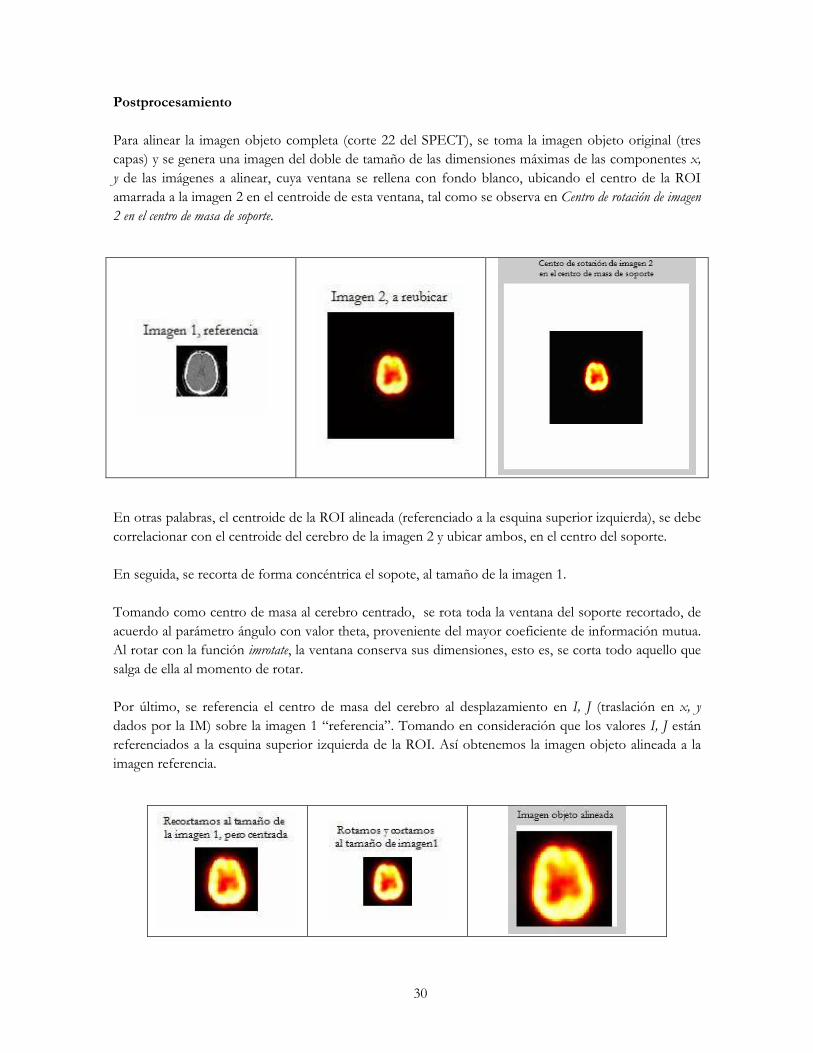
Postprocesamiento Para alinear la imagen objeto completa (corte 22 del SPECT), se toma la imagen objeto original (tres capas) y se genera una imagen del doble de tamaño de las dimensiones máximas de las componentes x, y de las imágenes a alinear, cuya ventana se rellena con fondo blanco, ubicando el centro de la ROI amarrada a la imagen 2 en el centroide de esta ventana, tal como se observa en Centro de rotación de imagen 2 en el centro de masa de soporte.
En otras palabras, el centroide de la ROI alineada (referenciado a la esquina superior izquierda), se debe correlacionar con el centroide del cerebro de la imagen 2 y ubicar ambos, en el centro del soporte. En seguida, se recorta de forma concéntrica el sopote, al tamaño de la imagen 1. Tomando como centro de masa al cerebro centrado, se rota toda la ventana del soporte recortado, de acuerdo al parámetro ángulo con valor theta, proveniente del mayor coeficiente de información mutua. Al rotar con la función imrotate, la ventana conserva sus dimensiones, esto es, se corta todo aquello que salga de ella al momento de rotar. Por último, se referencia el centro de masa del cerebro al desplazamiento en I, J (traslación en x, y dados por la IM) sobre la imagen 1 “referencia”. Tomando en consideración que los valores I, J están referenciados a la esquina superior izquierda de la ROI. Así obtenemos la imagen objeto alineada a la imagen referencia.
31
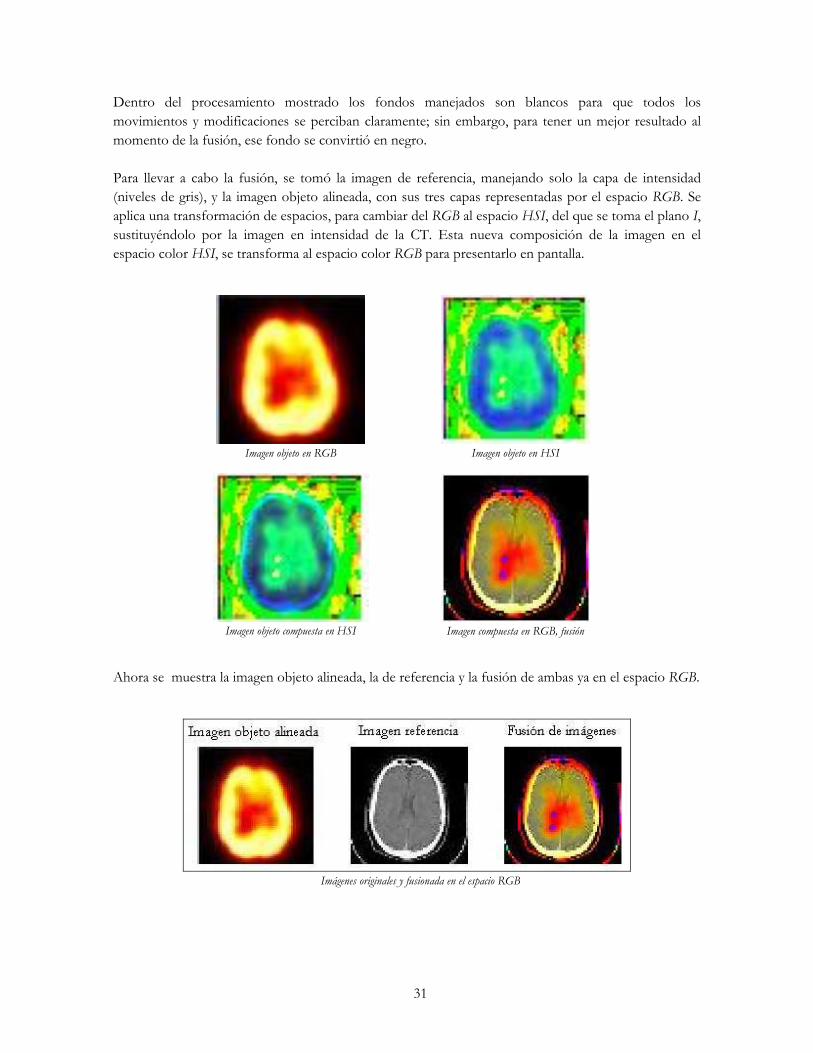
Dentro del procesamiento mostrado los fondos manejados son blancos para que todos los movimientos y modificaciones se perciban claramente; sin embargo, para tener un mejor resultado al momento de la fusión, ese fondo se convirtió en negro. Para llevar a cabo la fusión, se tomó la imagen de referencia, manejando solo la capa de intensidad (niveles de gris), y la imagen objeto alineada, con sus tres capas representadas por el espacio RGB. Se aplica una transformación de espacios, para cambiar del RGB al espacio HSI, del que se toma el plano I, sustituyéndolo por la imagen en intensidad de la CT. Esta nueva composición de la imagen en el espacio color HSI, se transforma al espacio color RGB para presentarlo en pantalla.
Imagen objeto en RGB
Imagen objeto en HSI
Imagen objeto compuesta en HSI
Imagen compuesta en RGB, fusión
Ahora se muestra la imagen objeto alineada, la de referencia y la fusión de ambas ya en el espacio RGB.
Imágenes originales y fusionada en el espacio RGB

32
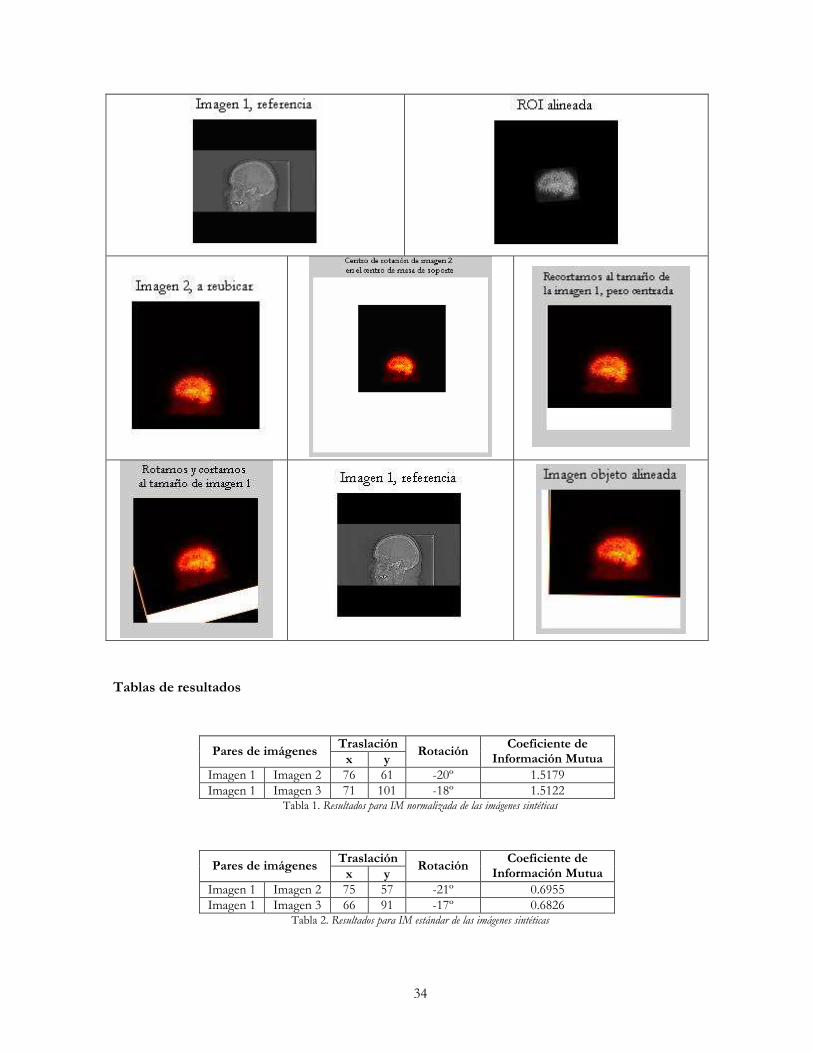
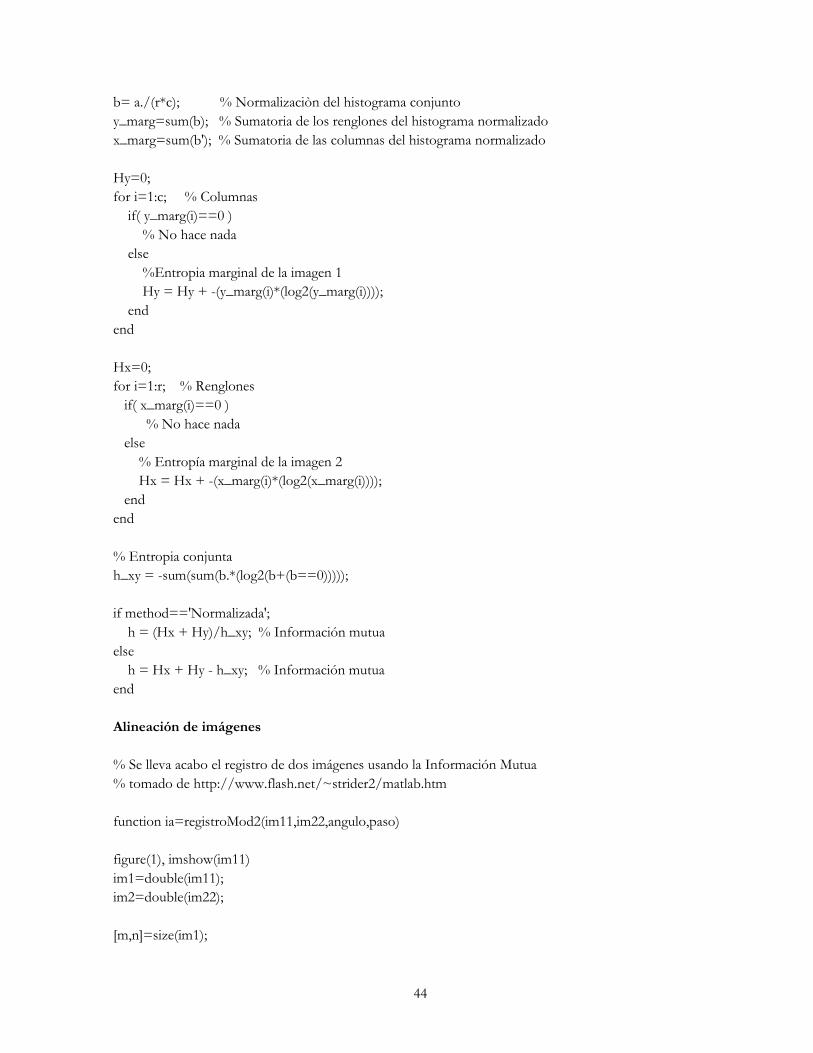
Ejemplo 2
Sagital CT
Sagital SPECT

33
Tres rotaciones a diferentes ángulos con tres traslaciones correspondientes
34
Tablas de resultados
Traslación Pares de imágenes
x y Rotación
Coeficiente de Información Mutua
Imagen 1 Imagen 2 76 61 -20º 1.5179 Imagen 1 Imagen 3 71 101 -18º 1.5122
Tabla 1. Resultados para IM normalizada de las imágenes sintéticas
Traslación Pares de imágenes
x y Rotación
Coeficiente de Información Mutua
Imagen 1 Imagen 2 75 57 -21º 0.6955 Imagen 1 Imagen 3 66 91 -17º 0.6826
Tabla 2. Resultados para IM estándar de las imágenes sintéticas

35
Pares de imágenes Traslación CT SPECT x y
Rotación Coeficiente de
Información Mutua 8 16 6 8 -2° 1.5439 10 20 2 6 -2° 1.5850 11 18 4 7 -4° 1.5626 12 21 3 3 -5° 1.5715 16 22 3 6 -5° 1.5942 20 23 7 8 0° 1.6056 26 25 10 9 0° 1.6249 28 26 14 7 1° 1.6341 29 27 23 17 -3° 1.5917
Sagital Sagital 47 39 -1° 1.4437 12 7 81 61 8° 1.2940 18 18 51 31 8° 1.3202 22 20 41 31 5° 1.3319 24 18 8 6 0° 1.3601 32 11 5 6 0° 1.2954
Tabla 3. Resultados para IM normalizada de imágenes reales
Pares de imágenes Traslación CT SPECT x y
Rotación Coeficiente de
Información Mutua 8 16 6 8 -3° 0.3810 10 20 3 6 -2° 0.3066 11 18 6 9 -1° 0.3609 12 21 3 4 -5° 0.3081 16 22 3 3 -5° 0.3084 20 23 6 6 -3° 0.3033 26 25 7 7 -1° 0.2917 28 26 15 8 -4° 0.3410 29 27 22 17 4° 0.3917
Sagital Sagital 47 39 -1° 0.6341 12 7 81 61 8° 0.7503 18 18 51 31 7° 0.9937 22 20 36 21 8° 0.9618 24 18 9 5 0° 0.6035 32 11 7 8 1° 0.5713
Tabla 4. Resultados para IM estándar imágenes reales
Para establecer una relación entre la IM normalizada y estándar, se graficaron los valores normalizados, divididos entre dos, contra los estándar, con los que se obtuvo la gráfica Variación de coeficientes de IM, donde la serie 1 corresponde a las imágenes sintéticas, la serie 2 a las imágenes del neonato, la serie 3 a los cortes coronales del adulto y la serie 4 al corte sagital del mismo.

36
Variación de coeficientes de IM
0.550
0.600
0.650
0.700
0.750
0.800
0.850
0.200 0.400 0.600 0.800 1.000
IM normalizada
IM están
dar Serie1
Serie2
Serie3
Serie4
Para poder realizar una comparación de los valores de IM resultantes al ejecutar el algoritmo RegMod2, se llevó acabo una alineación manual de un par de juegos de imágenes, cuyos resultados se presentan inmediatamente.
Traslación Pares de imágenes
x y Rotación
Coeficiente de Información Mutua
Imagen 1 Imagen 3 4 4 -20º 1.5470 CT SPECT 16 22 6 2 -2° 1.5638
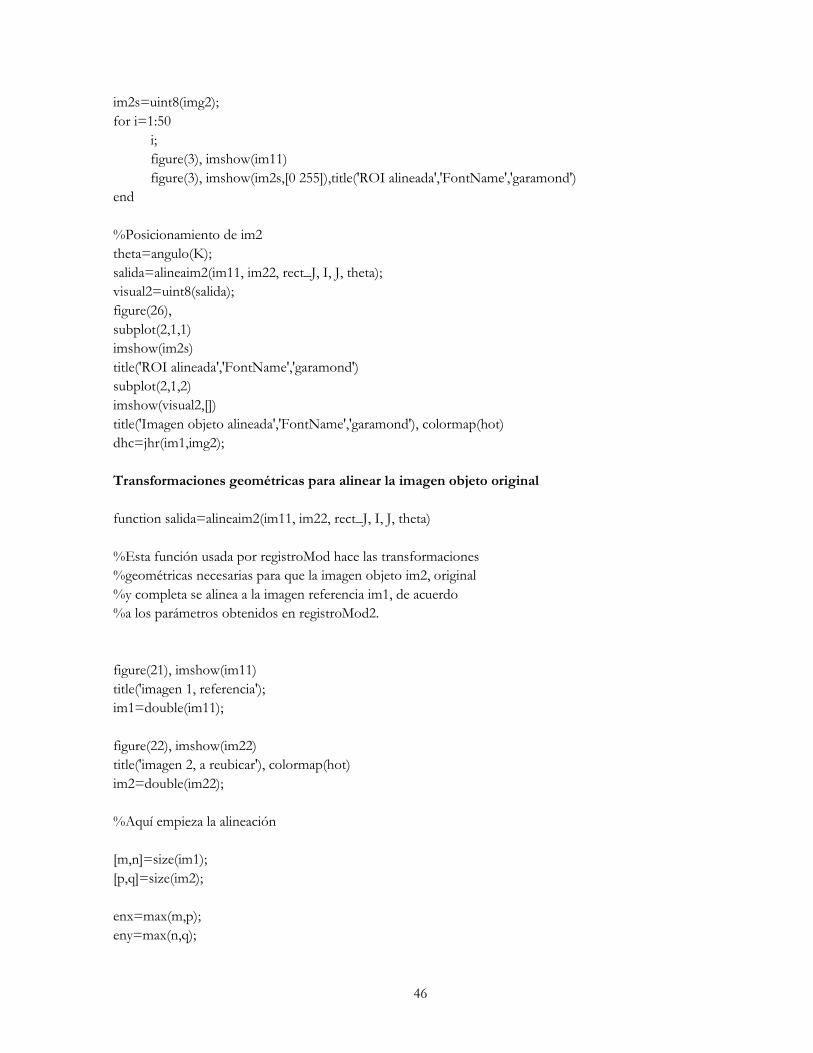
Sagital Sagital 38 45 2° 1.4224 24 18 23 16 20º 1.3643
Tabla 5. Resultados para IM normalizada manual
Traslación Pares de imágenes
x y Rotación
Coeficiente de Información Mutua
Imagen 1 Imagen 3 4 4 -20º 0.8131 CT SPECT 16 22 6 2 -2° 0.3098
Sagital Sagital 38 45 2° 0.6385 24 18 23 16 20º 0.7464
Tabla 6. Resultados para IM estándar manual
37
Imagen 1
Imagen 3
Imagen 3 alineada manualmente
Corte 16 CT
Corte 22 SPECT
Corte 22 SPECT
alineado manualmente
Sagital CT
Sagital SPECT
Sagital SPECT
alineado manualmente
Corte 24 CT
Corte 18 SPECT
Corte 22 SPECT
alineado manualmente

38
CAPÍTULO IV
ANÁLISIS DE RESULTADOS
Al efectuar las pruebas de funcionamiento, de las funciones implementadas en Matlab, para el cálculo del histograma conjunto y de la información mutua, los resultados fueron los esperados. Al conjuntar las funciones mencionadas en RegMod2, el histograma tiene una distorsión (aparición de intensidades en una vertical), lo cual afecta directamente al cálculo de la información mutua. Esto se debe a que, al pedir la selección de la ROI, no se debe escoger toda la imagen, pues se presenta un error de índices, que se puede corregir situándolas en una pantalla más grande, es decir, que sean contenidas en una matriz de mayor dimensión.
Según se puede observar en las imágenes resultantes, un buen coeficiente de información mutua no garantiza que el alineamiento sea adecuado, esto se puede deber a ciertos factores que se omitieron al momento de realizar la implementación de los algoritmos. Tal es el caso de la existencia, en varios puntos (en diferentes posiciones y rotaciones), del mismo valor de información mutua, donde la implementación considera únicamente el primero de ellos, dando los parámetros pertenecientes a él, los cuales, como se puede apreciar, no son los idóneos para una buena alineación y, probablemente, se encuentren en alguno de los otros puntos. Por lo que se recomienda hacer una evaluación en cada uno de los puntos máximos de información mutua y establecer un método de discriminación para elegir el más conveniente. Otros motivos probables, por los que no se obtuvo una incorrecta alineación, es que el paso asignado al barrido, tanto en traslaciones como en rotaciones, no permitiera la posición óptima; y que, como se dijo en la metodología, las parejas de cortes se escogieron empíricamente. Para que esta elección hubiese sido más precisa, se debió hacer en función de un apilamiento espacial. Cabe mencionar, que se han encontrado casos en los que la información mutua no disminuye al no haber una buena alineación, sino que por el contrario, podría llegar a incrementarse. Esto ocurre debido a casuales traslapes de regiones del fondo, haciendo que las entropías marginales crezcan más rápido que el decrecimiento de la entropía conjunta, ocasionando falsos registros; lo cual pudo haber ocurrido al momento de calcular los coeficientes estándar, haciendo, de esta manera, que fueran menores en su proporción, a los normalizados, como se observa en las tablas de resultados. Del mismo modo, dicho fenómeno puede surgir a consecuencia de que la ROI seleccionada no sea la misma en ambos eventos. Por esta razón, según se pudo constatar, pueden deberse las divergencias entre los parámetros de rotación y traslación, pues en el caso del corte sagital, en el que se logró la misma selección, dichos valores coinciden.
Al analizar la gráfica, no se encontró un patrón que nos permita establecer una relación que nos ayude a puntualizar en que proporción variaría la información mutua estándar de la normalizada o viceversa. Sin embargo, se puede observar que la información mutua normalizada es más consistente que la estándar, ya que como era de esperarse, todos los coeficientes de ella son cercanos si pertenecen al mismo

39
estudio y tipo de corte, señalándonos de alguna manera que se adoptaron los mismos parámetros de adquisición, por este motivo, dicha gráfica nos ayuda a diferenciar si las imágenes pertenecen a un mismo estudio. Por otro lado, la fusión realizada es una aproximación simple, que nos permite combinar ciertas características de la imagen funcional con la anatómica, que si bien, a nosotros no nos aporta mucha información, a los especialistas, posiblemente, les ayude a descubrir la localización aproximada de una deficiencia o patología, esta localización será más precisa en función de una buena alineación.

40
CAPÍTULO V
CONCLUSIONES Y PERSPECTIVAS
Este trabajo es una primera aproximación para realizar la alineación de imágenes médicas, en el que se pudo constatar que es una tarea compleja, en la que las coordenadas homogéneas son una herramienta importante y útil. En ella se deben tomar en cuenta muchos detalles, que al hacer una implementación de este tipo toman gran relevancia, por esto, es recomendable llevar acabo un preprocesamiento robusto en el que se aísle la región de interés, destacando las características principales de las imágenes obtenidas por diferentes sistemas de adquisición (modalidades). La información mutua como medida de similitud, aunque es muy recomendada por los estudiosos del tema, en nuestro caso no tuvo resultados óptimos, lo cual se debió en gran medida a elementos que no se consideraron en las implementaciones, ni cuando se ejecutó el procesamiento. Los resultados confirman, una vez más, que el coeficiente de información mutua normalizada es más consistente que el estándar, al depender menos de las entropías, por lo que se puede decir que es más confiable. Si se grafican dichos coeficientes encontramos que se tiene un “clasificador”, que agrupa los datos de acuerdo al protocolo de adquisición. En cuanto a la fusión, pese a que fue de forma muy básica, podemos decir que nos da una idea certera de cómo se puede perpetrar y que depende en gran medida de la alineación correcta de las imágenes a unificar. Además, de que en los últimos años, en el medio clínico, ésta maniobra ha tomado gran importancia, ya que aporta información precisa para el diagnóstico, siendo, de esta manera, una herramienta de apoyo. Es recomendable que en trabajos futuros, no sólo se corrijan los puntos indicados en el análisis, si no que se haga una implementación más robusta de los pasos señalados en este reporte. Cabe destacar, que se están desarrollando otros proyectos en los que se estudian temas e implementaciones que apoyan a éste, tal como la reconstrucción tridimensional, realizada por Eduardo Lucero Delgado y la interpolación con Thin Plate Splines muy útil tanto para la reconstrucción tridimensional como para registros no rígidos, examinado por Teresa del C. Hernández Arano. Estas contribuciones permitirán, sin lugar a duda, mejorar los resultados.

41
BIBLIOGRAFÍA
[1] Valdés Cristerna, Raquel et al. “Imagenología Médica”. Universidad Autónoma Metropolitana unidad Iztapalapa. 1ra. ed. México D. F., 1995.
[2] Mazziotta J.C., Gilman S. “Clinical Brain Imaging: Principles and Applications”. Philadelphia. F. A. Davis Company. 1992. Págs. 108-134.
[3] Maintz, J. B. A. y Viergever, M. A. “A survey of Medical Image Registration”. Medical Image Analysis, 1998. Vol. 2, No. 1, Págs. 1-36
[4] Woods, J. C. et al. “J Comput Assist Tomogr”. 1993, Págs. 536-546
[5] Hill, D.L.G. y Hawkes D.J. “Across-Modality Registration Using Intensity-Based Cost Functions”. Handbook of Medical Imaging, 2000. Págs. 537-551.
[6] Viola, P. y Wells III, W. M. “Proc. 5th Int. Conf. Computer Vision”. 1995, Págs. 16-23
[7] Collignon, A. et al. “Proc. Int. Conf. Info Processing Medical Imaging: Computational Imaging and Vision”. 1995, Págs. 263-274
[8] Studholme, C et al. “A normalized entropy for multi-modality image alignment”. Medical Imaging: Image Processing, 1998.
[9] Goshtasby Ardeshir. “2-D and 3-D Image Registration for Medical, Remote Sensing, and Industrial Application”. Wiley-Interscience. 1ra ed, Estados Unidos de América, 2005.
[10] Foley et al. “Computer Graphics Principles and Practice”. Addison-Wesley. 2da ed, Estados Unidos de América, 1992.
[11] Tsao, Jeffrey et al. “Interpolation techniques multimodality image registration and their application”. Medical Imaging Systems Technology - Analysis and Computational Methods, 2005.
[12] Chen, H-M y Varshney, P. K. “Technique for Mutual Information-Based Brain Image Registration and their Applications”. Medical Imaging Systems Technology - Analysis and Computational Methods, 2005.
[13] Chuvieco, E. “Fundamentos de Teledetección espacial”. Ed. Rialp S. A. Madrid, 1996.
[14] Pinilla Ruíz, C. “Elementos de teledetección”. Ed. Ra-ma. Madrid, 1995.
[15] Vivas, P. “Un esquema de fusión de datos para la formación de cartografía a escala 1/50.000 desde datos SPOT (P + XS) y SPOT (P) + LANDSAT (TM)”. V Reunión científica de la Asociación Española de Teledetección. Las Palmas de Gran Canaria, 1993. Págs. 907 – 917

42
[16] www.sph.sc.edu/cond/rorden/ezdicom.html. Página en Internet visitada en Octubre del 2007.
[17] www.imageprocessingplace.com/root_files_V3/links/links. Página en Internet visitada en Enero del 2008.
43
ANEXO A. FUNCIONES EN MATLAB
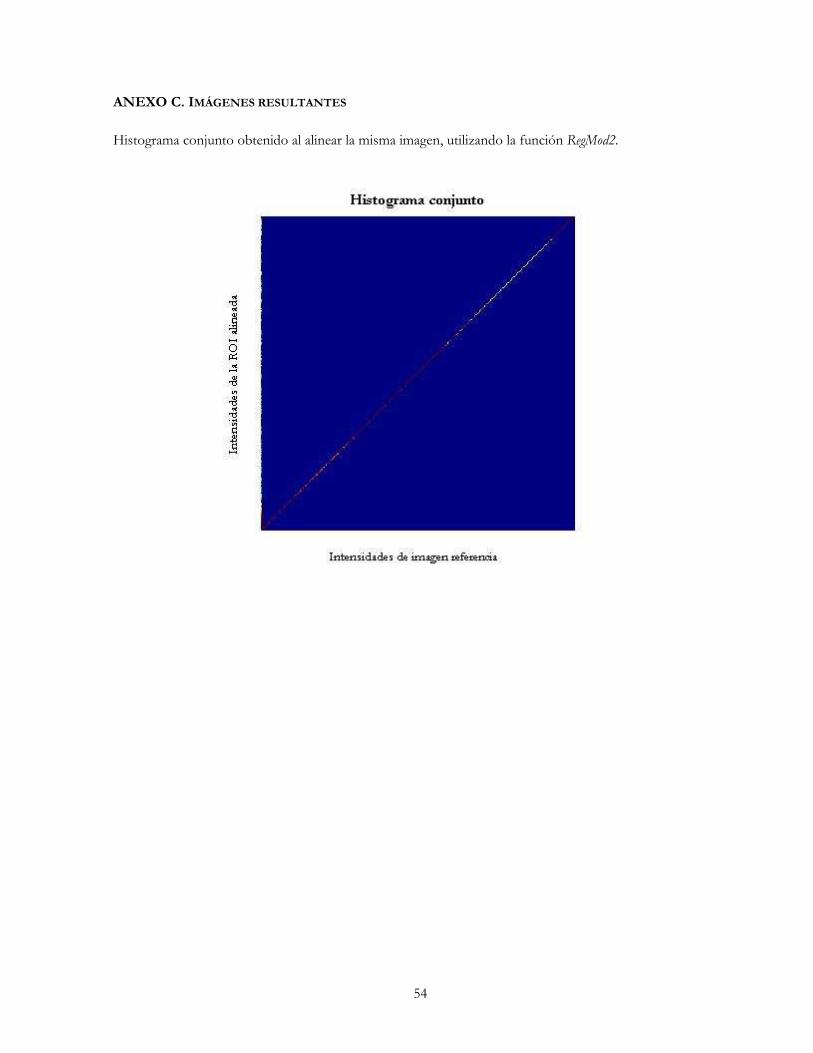
Cálculo del histograma conjunto % A partir de dos imágenes de igual tamaño, se obtiene el histograma % conjunto utilizado para el cálculo de la IM % written by http://www.flash.net/~strider2/matlab.htm function h=joint_h(image_1,image_2) rows=size(image_1,1); cols=size(image_1,2); N=256; h=zeros(N); for i=1:rows; % Columnas for j=1:cols; % Renglones h(image_1(i,j)+1,image_2(i,j)+1)= h(image_1(i,j)+1,image_2(i,j)+1)+1; end end Para desplegar el histograma se utilizó la misma función complementada con los siguiente: % Despliegue figure(29) g=100*(log(1+double(hr))); hrd=uint8(g); HC=flipud(hrd); imshow(HC) colormap(jet) title('Histograma conjunto','FontName','garamond','FontWeight','bold') xlabel('Intensidades de imagen referencia','FontName','garamond') ylabel('Intensidades de la ROI alineada','FontName','garamond') Cálculo de la Información Mutua % Esta función calcula la información mutua de dos imágenes, esto usando % la entropia conjunta obtenida por la funciòn JOINT_H.m % written by http://www.flash.net/~strider2/matlab.htm function h=MI2(image_1,image_2,method) a=joint_h(image_1,image_2); % Cálculo del histograma conjunto [r,c] = size(a);
44
b= a./(r*c); % Normalizaciòn del histograma conjunto y_marg=sum(b); % Sumatoria de los renglones del histograma normalizado x_marg=sum(b'); % Sumatoria de las columnas del histograma normalizado Hy=0; for i=1:c; % Columnas if( y_marg(i)==0 ) % No hace nada else %Entropia marginal de la imagen 1 Hy = Hy + -(y_marg(i)*(log2(y_marg(i)))); end end Hx=0; for i=1:r; % Renglones if( x_marg(i)==0 ) % No hace nada else % Entropía marginal de la imagen 2 Hx = Hx + -(x_marg(i)*(log2(x_marg(i)))); end end % Entropia conjunta h_xy = -sum(sum(b.*(log2(b+(b==0))))); if method=='Normalizada'; h = (Hx + Hy)/h_xy; % Información mutua else h = Hx + Hy - h_xy; % Información mutua end Alineación de imágenes % Se lleva acabo el registro de dos imágenes usando la Información Mutua % tomado de http://www.flash.net/~strider2/matlab.htm function ia=registroMod2(im11,im22,angulo,paso) figure(1), imshow(im11) im1=double(im11); im2=double(im22); [m,n]=size(im1);

45
[p,q]=size(im2); [a,b]=size(angulo); method=questdlg('¿Qué método quiere usar?', 'Tipo','Normalizada',' Estándar ','Normalizada'); men= msgbox('Recorte la región de mayor interés de alineación'); uiwait(men) %Espera respuesta del usuario subim2=uint8(im2); figure(2) [sub_J,rect_J] = imcrop(subim2);%sub_J da el segmento de imagen cortada title('Imagen objeto, recorte la ROI') sub_im2=double(sub_J); %Barrido en ángulos y posiciones for k=1:b
J=imrotate(sub_im2, angulo(k),'bilinear'); % Rota y recorta IM2 im21=round(J);%hace enteros los valores de la imagen rotada,
[m1,n1]=size(im21); for i=1:paso:(m-m1)
for j=1:paso:(n-n1) img2=zeros(size(im1));
img2(i:(i+m1-1),j:(j+n1-1))=im21(1:m1,1:n1); img2=round(img2); h(k,i,j)=MI2(im1,img2,method); end end end %Gráfica de los diferentes valores de Información Mutua [tot, ign]=size(h(:)) figure(34) plot([1:tot],h(1:tot)) title('Gráfica de Información Mutua','FontName','garamond','FontWeight','bold') hold on %Marcamos el máximo coeficiente de IM [a,b]=max(h(:)) [K,I,J]=ind2sub(size(h),b) figure(34) plot(b,a,'*r') parcial=imrotate(sub_im2,angulo(K), 'bilinear'); im2=round(parcial); [m1,n1]=size(im21); img2=zeros(size(im1)); img2(I:(I+m1-1),J:(J+n1-1))=im21(1:m1,1:n1); img2=round(img2);
46
im2s=uint8(img2); for i=1:50
i; figure(3), imshow(im11) figure(3), imshow(im2s,[0 255]),title('ROI alineada','FontName','garamond')
end %Posicionamiento de im2 theta=angulo(K); salida=alineaim2(im11, im22, rect_J, I, J, theta); visual2=uint8(salida); figure(26), subplot(2,1,1) imshow(im2s) title('ROI alineada','FontName','garamond') subplot(2,1,2) imshow(visual2,[]) title('Imagen objeto alineada','FontName','garamond'), colormap(hot) dhc=jhr(im1,img2); Transformaciones geométricas para alinear la imagen objeto original function salida=alineaim2(im11, im22, rect_J, I, J, theta) %Esta función usada por registroMod hace las transformaciones %geométricas necesarias para que la imagen objeto im2, original %y completa se alinea a la imagen referencia im1, de acuerdo %a los parámetros obtenidos en registroMod2. figure(21), imshow(im11) title('imagen 1, referencia'); im1=double(im11); figure(22), imshow(im22) title('imagen 2, a reubicar'), colormap(hot) im2=double(im22); %Aquí empieza la alineación [m,n]=size(im1); [p,q]=size(im2); enx=max(m,p); eny=max(n,q);

47
soporte=ones(2*enx,2*eny)*255; xmin=rect_J(1); ymin=rect_J(2); width=rect_J(3); height=rect_J(4); %Centroide de im2 cxim2=xmin+round(width/2); cyim2=ymin+round(height/2);%x y y podrían estar invertidos %Centroide de soporte cxsop=enx+1; cysop=eny+1; %Reubicación en el primer cuadrante de im2 en soporte soporte((cysop-cyim2+1):cysop,cxsop:(cxsop+(q-cxim2)))=im2(1:cyim2,cxim2:end); % Reubicación en el segundo cuadrante de im2 en soporte soporte((cysop-cyim2+1):cysop,(cxsop-cxim2+1):cxsop)=im2(1:cyim2,1:cxim2); % Reubicación en el tercer cuadrante de im2 en soporte soporte(cysop+1:(cysop+p-cyim2), cxsop-cxim2+1:cxsop)=im2(cyim2+1:end,1:cxim2); % Reubicación en el cuarto cuadrante de im2 en soporte soporte(cysop+1:(cysop+p-cyim2), cxsop+1:(cxsop+q-cxim2))=im2(cyim2+1:end, cxim2+1:end); visual=uint8(soporte); %figure(23),imshow(visual,[]) %title('centro de rotación de im2 en el centro de masa de soporte'), colormap(hot) %Recortamos al tamaño de la imagen im1 pero centrada. xsupizq=floor(cysop-m/2)-1; ysupizq=floor(cxsop-m/2)-1; I2 = imcrop(soporte,[xsupizq ysupizq n m]); %figure(24), imshow(I2,[]) %title('Recortamos al tamaño de la imagen im1 pero centrada'), colormap(hot) %Rotamos y cortamos al tamaño de im1 J2 = imrotate(I2,theta,'bilinear','crop'); %figure(25), imshow(J2,[]) %title('rotamos y cortamos al tamaño de im1'), colormap(hot) %Traslación mx=0; ny=0;

48
refx=J+round((height-m)/2); refy=I+round((width-n)/2); salida=ones(m,n)*255;%con fondo negro usamos zeros no ones for i2=1:m for j2=1:n mx=i2+refx; ny=j2+refy; if ((1<=mx)&&(mx<=m)&&(1<=ny)&&(ny<=n)) salida(mx,ny)=J2(i2,j2); end end end Cambio de espacio RGB a HSI %Esta function convierte una imagen RGB a una HSI function hsi = rgb2hsi(rgb) % Extracción de las componentes individuales de la imagen rgb = im2double(rgb); r = rgb(:,:,1); g = rgb(:,:,2); b = rgb(:,:,3); % Implementación de las ecuaciones de conversión num = 0.5 * ((r-g) + (r-b)); den = sqrt((r-g).^2+(r-b).*(g-b)); theta= acos(num./(den+eps)); H=theta; H(b>g)=2*pi-H(b>g); H=H/(2*pi); num=min(min(r,g),b); den=r+g+b; den(den == 0) = eps; S = 1-3.*num./den; H(S == 0) = 0; I = (r+g+b)/3; % Combinación de los tres resultados en una imagen HSI hsi = cat(3, H, S, I);

49
Cambio de espacio HSI a RGB % Convierte una imagen HSI a RGB function rgb = hsi2rgb(hsi) % Extracción de las componentes HSI individuales H=hsi(:,:,1)*2*pi; S=hsi(:,:,2); I=hsi(:,:,3); % Implementación de las ecuaciones de conversión R=zeros(size(hsi,1), size(hsi,2)); G=zeros(size(hsi,1), size(hsi,2)); B=zeros(size(hsi,1), size(hsi,2)); % RG sector (0<=H<2*pi/3). idx=find((0<=H)&(H<2*pi/3)); B(idx)=I(idx).*(1-S(idx)); R(idx)=I(idx).*(1+S(idx).*cos(H(idx))./cos(pi/3-H(idx))); G(idx)=3*I(idx)-(R(idx)+B(idx)); % BG sector (2*pi/3<=H<4*pi/3). idx=find((2*pi/3<=H)&(H<4*pi/3)); R(idx)=I(idx).*(1-S(idx)); G(idx)=I(idx).*(1+S(idx).*cos(H(idx)-2*pi/3)./cos(pi-H(idx))); B(idx)=3*I(idx)-(R(idx)+G(idx)); %BR sector idx=find((4*pi/3<=H)&(H<=2*pi)); G(idx)=I(idx).*(1-S(idx)); B(idx)=I(idx).*(1-S(idx).*cos(H(idx)-4*pi/3)./cos(5*pi/3-H(idx))); R(idx)=3*I(idx)-(G(idx)+B(idx)); %Combina los tres resultados en una imagen rgb=cat(3, R,G,B); rgb=max(min(rgb,1),0);
50
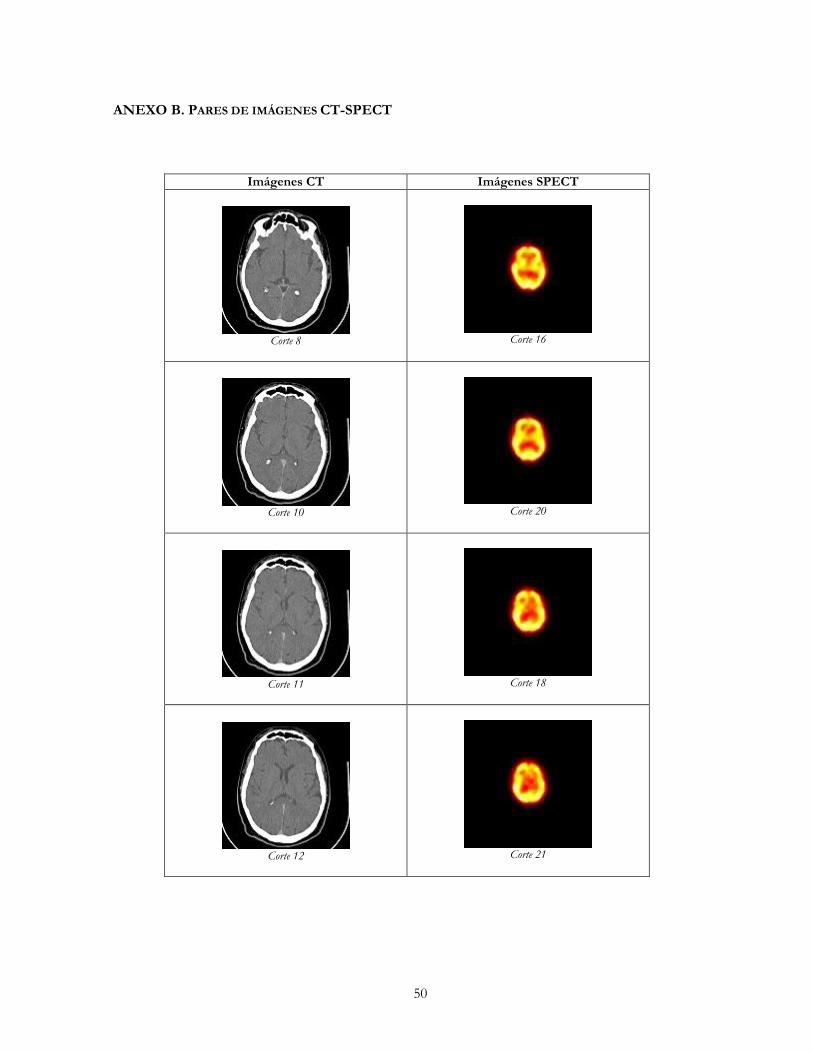
ANEXO B. PARES DE IMÁGENES CT-SPECT
Imágenes CT Imágenes SPECT
Corte 8
Corte 16
Corte 10
Corte 20
Corte 11
Corte 18
Corte 12
Corte 21

51
Corte 16
Corte 22
Corte 20
Corte 23
Corte 26
Corte 25
Corte 28
Corte 26
52
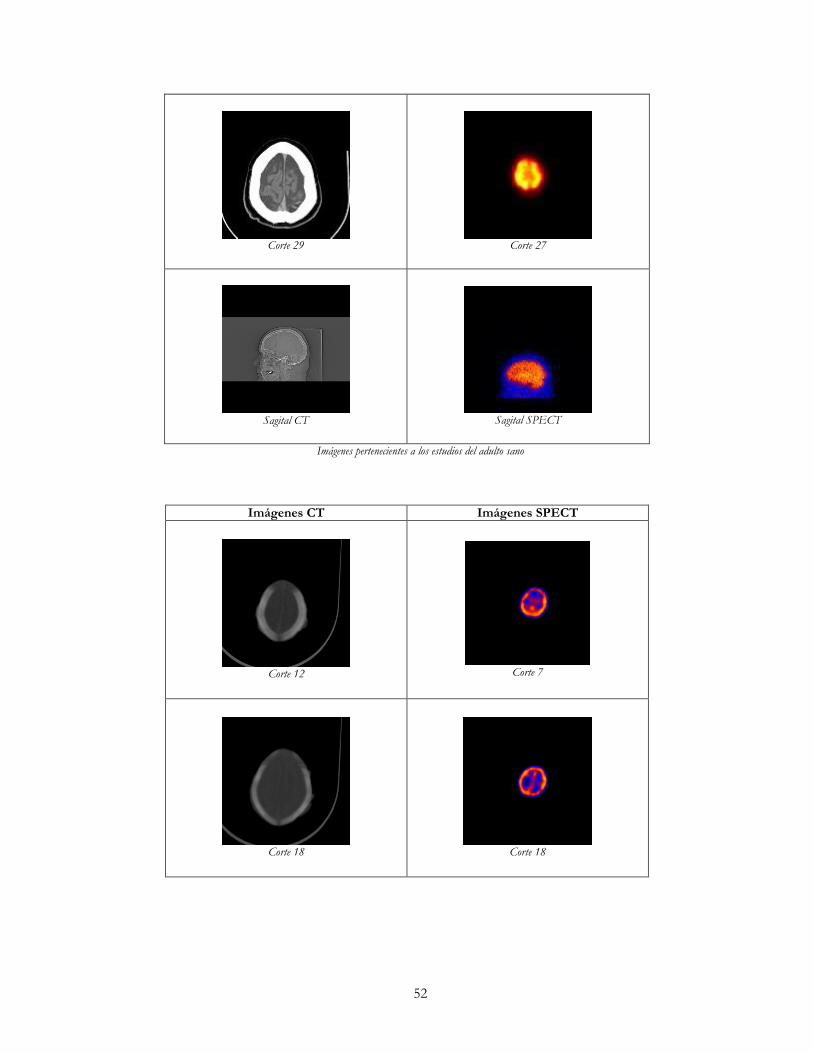
Corte 29
Corte 27
Sagital CT
Sagital SPECT
Imágenes pertenecientes a los estudios del adulto sano
Imágenes CT Imágenes SPECT
Corte 12
Corte 7
Corte 18
Corte 18

53
Corte 22
Corte 20
Corte 24
Corte 19
Corte 32
Corte 11
Imágenes pertenecientes a los estudios del neonato
54
ANEXO C. IMÁGENES RESULTANTES Histograma conjunto obtenido al alinear la misma imagen, utilizando la función RegMod2.

55
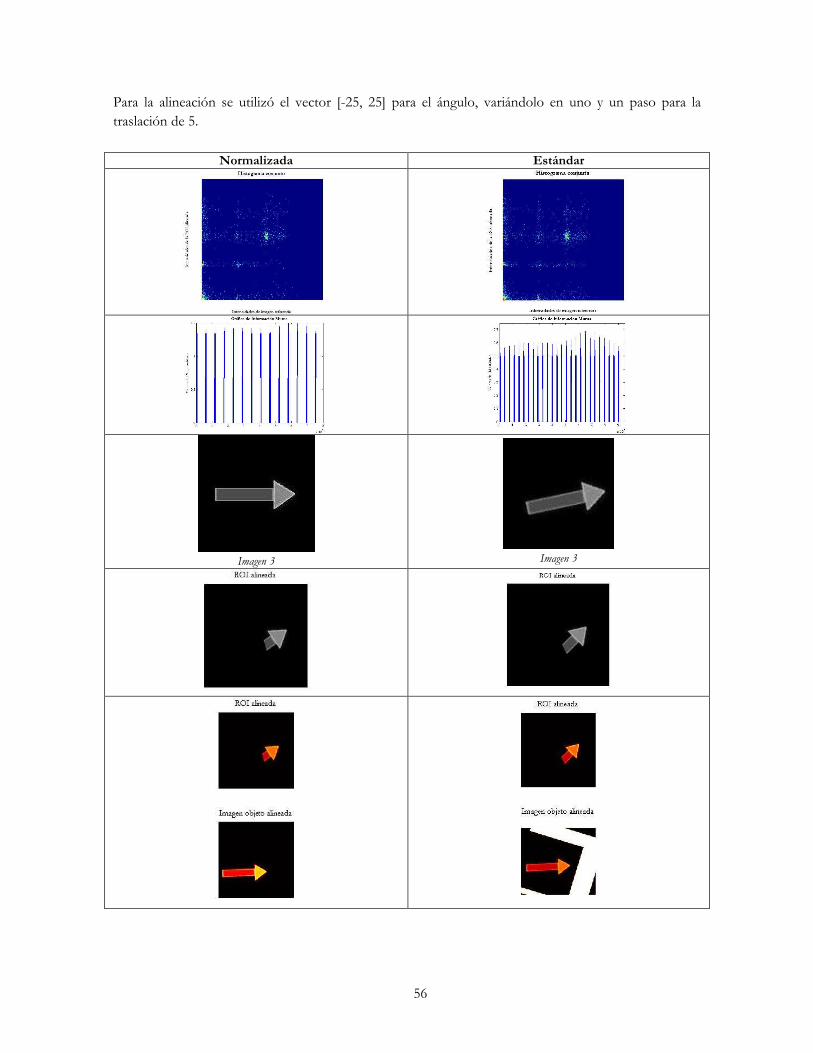
Para la alineación se utilizó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 5.
Normalizada Estándar
Imagen 2
Imagen 2
56
Para la alineación se utilizó el vector [-25, 25] para el ángulo, variándolo en uno y un paso para la traslación de 5.
Normalizada Estándar
Imagen 3
Imagen 3

57
Para la alineación del corte 8 de CT con el 16 de SPECT, se empleó el vector [-5, 5] para el ángulo, modificándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte 8 preprocesado
Corte 16
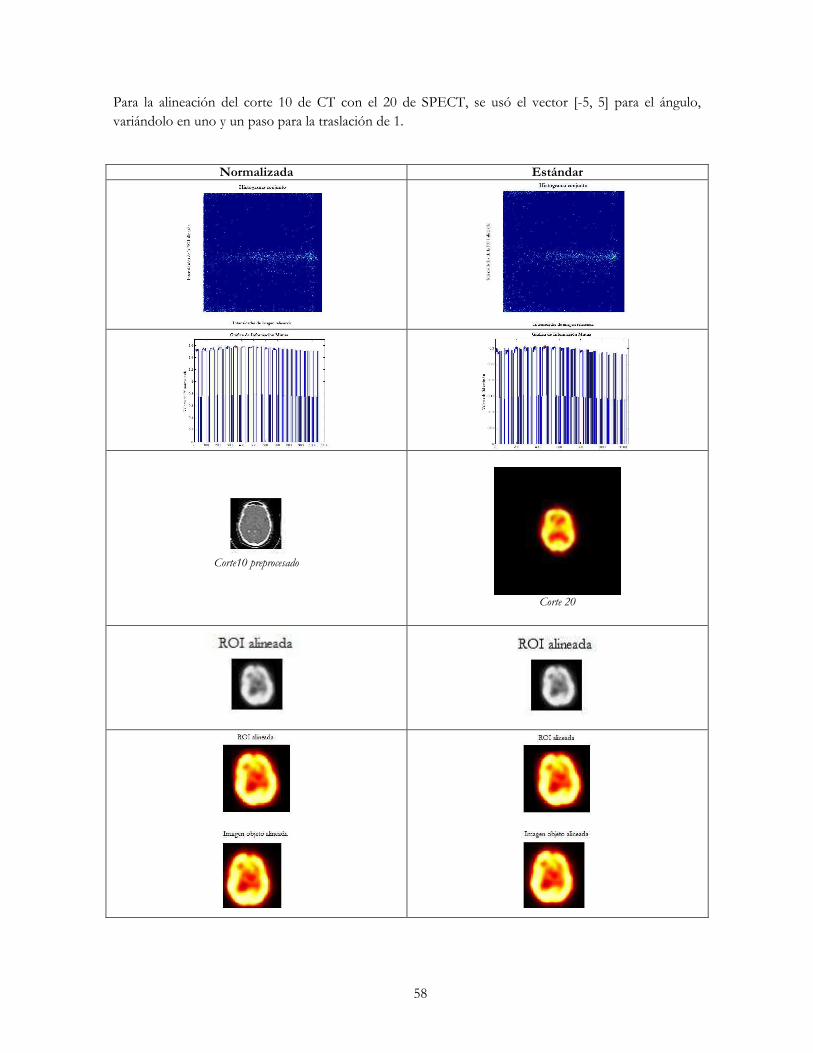
58
Para la alineación del corte 10 de CT con el 20 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte10 preprocesado
Corte 20

59
Para la alineación del corte 11 de CT con el 18 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte11 preprocesado
Corte 18
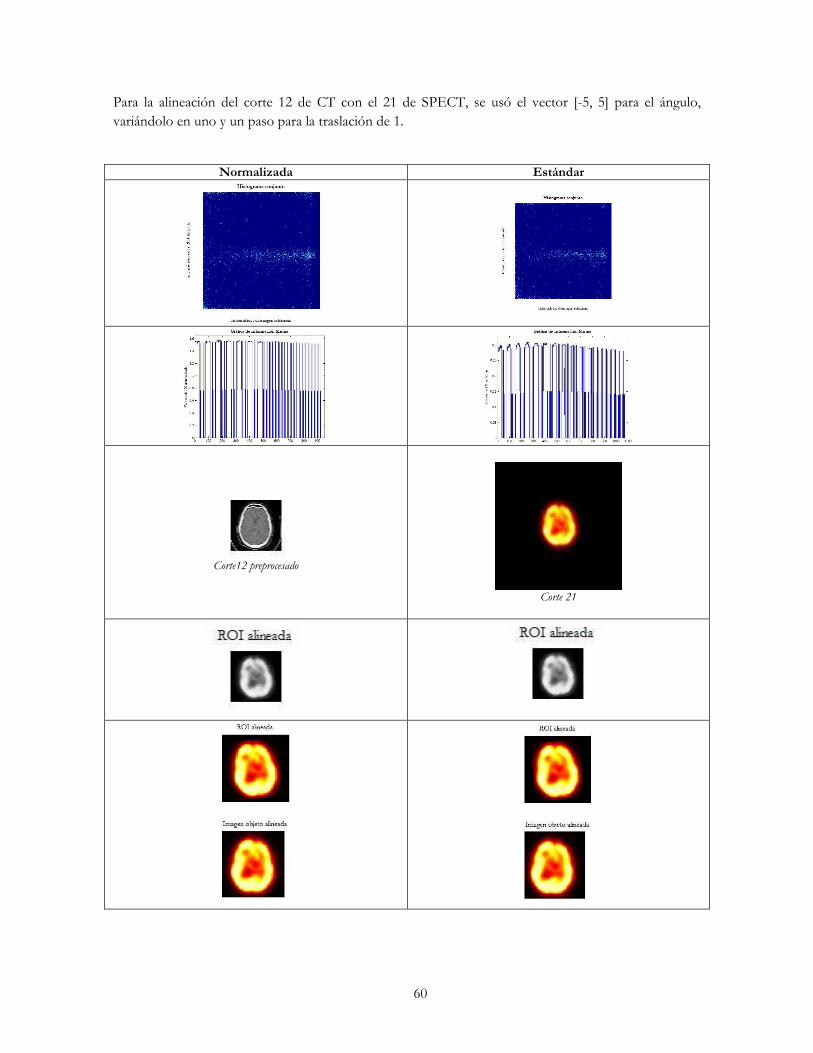
60
Para la alineación del corte 12 de CT con el 21 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte12 preprocesado
Corte 21
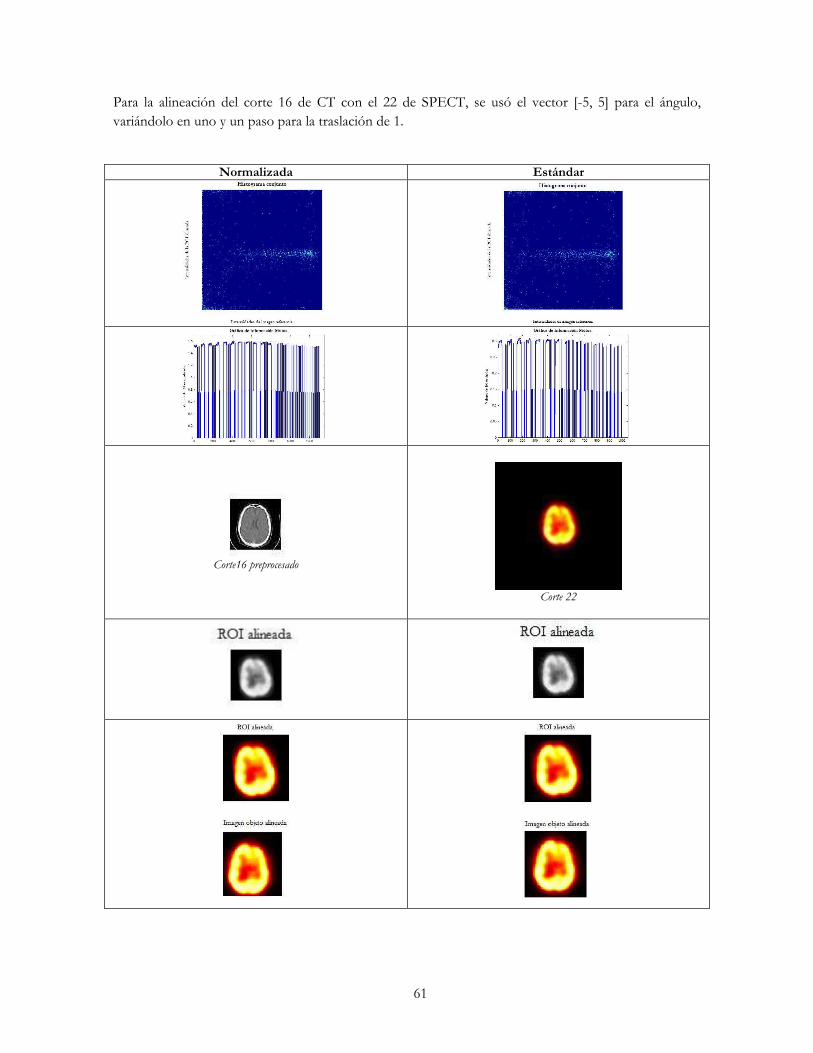
61
Para la alineación del corte 16 de CT con el 22 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte16 preprocesado
Corte 22
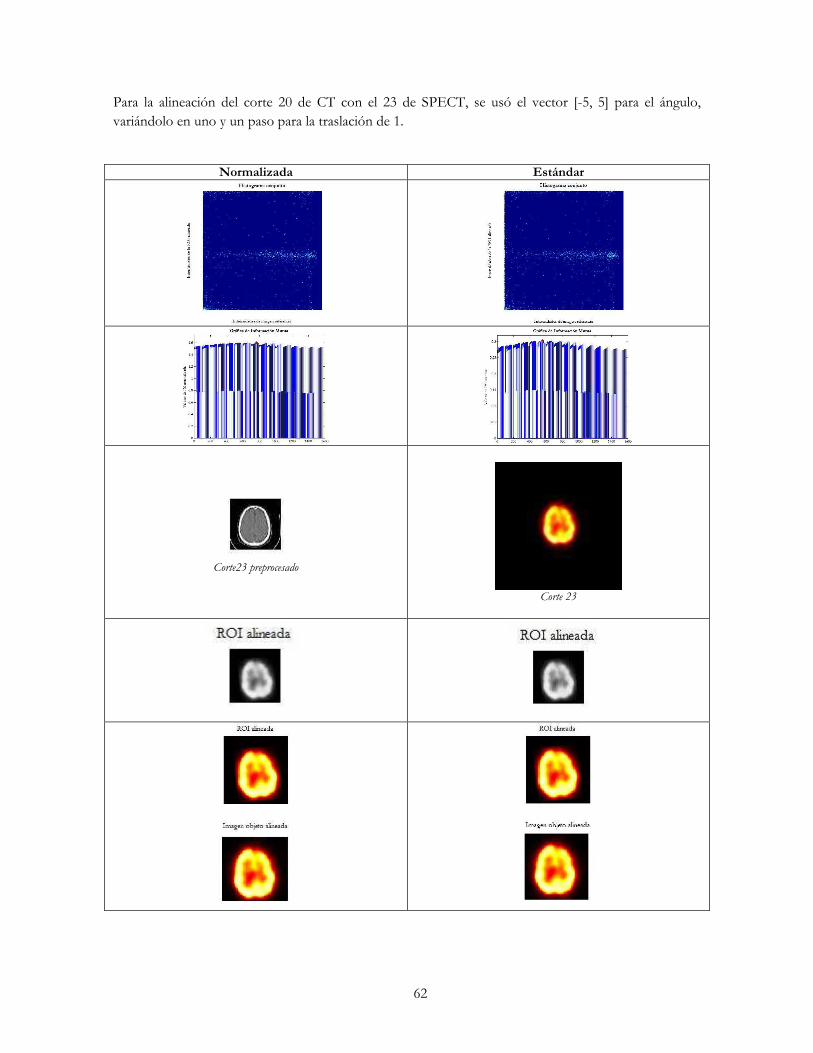
62
Para la alineación del corte 20 de CT con el 23 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte23 preprocesado
Corte 23
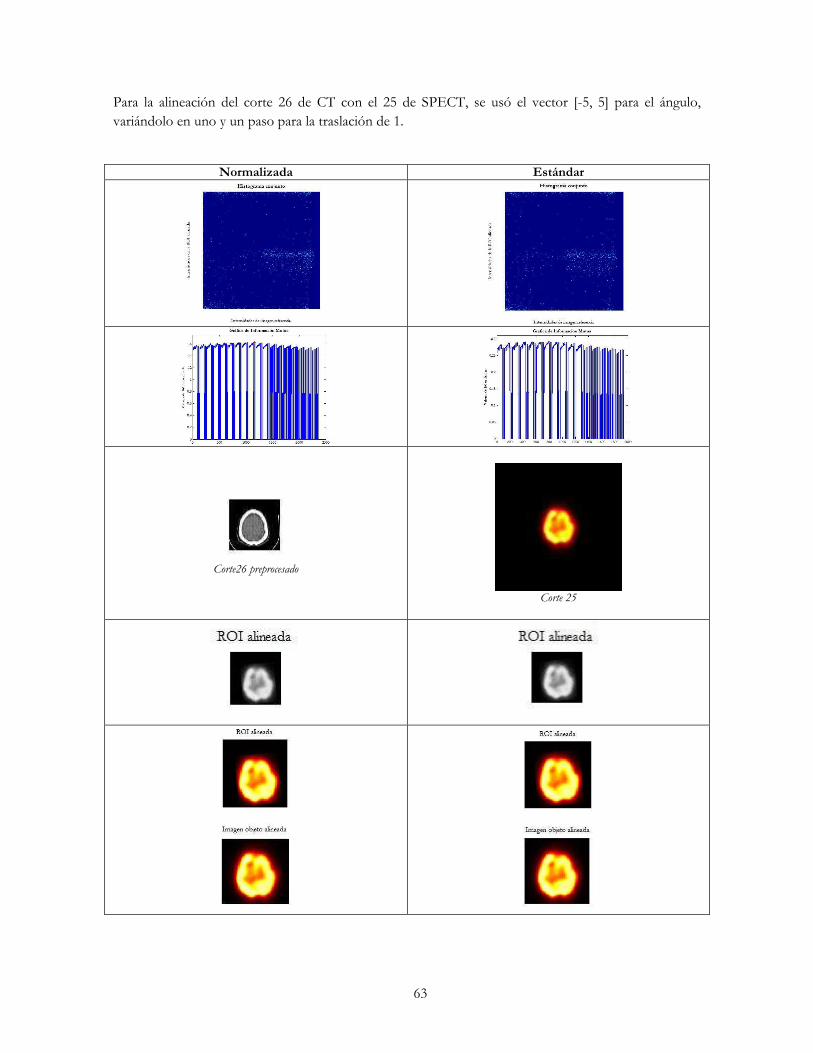
63
Para la alineación del corte 26 de CT con el 25 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte26 preprocesado
Corte 25
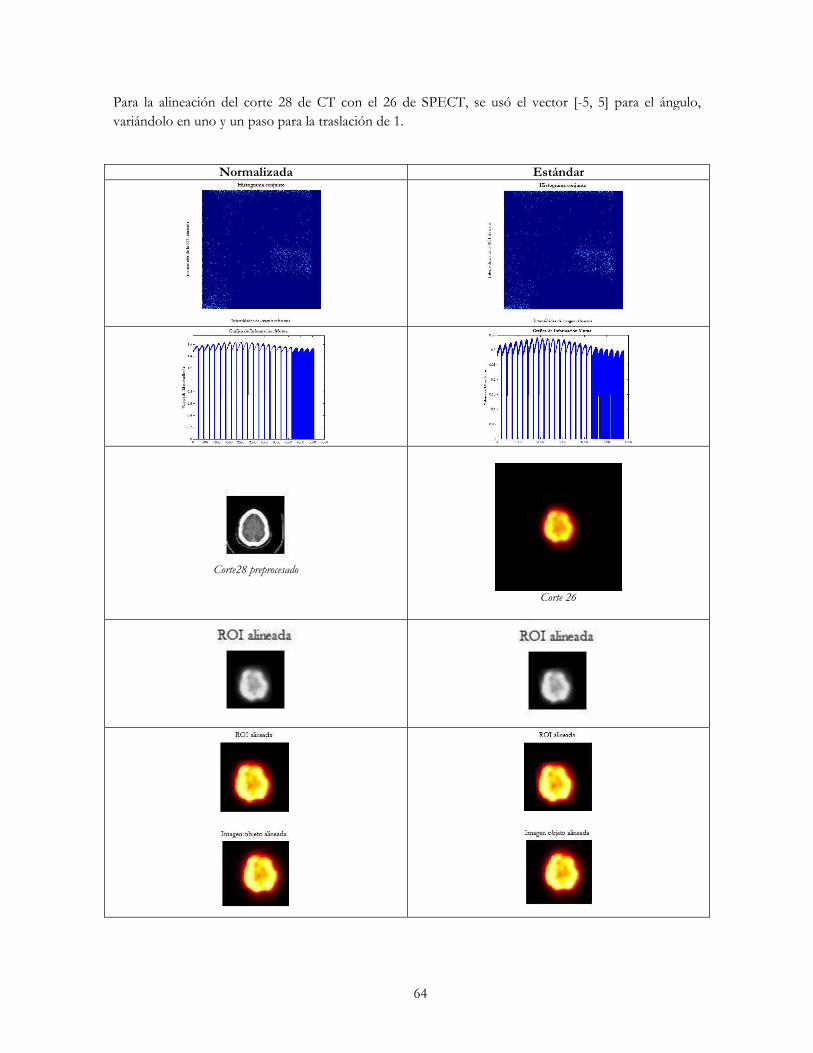
64
Para la alineación del corte 28 de CT con el 26 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte28 preprocesado
Corte 26

65
Para la alineación del corte 29 de CT con el 27 de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 1.
Normalizada Estándar
Corte29 preprocesado
Corte 27

66
Para la alineación del corte sagital de CT con el sagital de SPECT, se usó el vector [-5, 5] para el ángulo, variándolo en uno y un paso para la traslación de 2.
Normalizada Estándar
Sagital CT
Sagital SPECT

67
Para la alineación del corte 12 de CT con el 7 de SPECT, se usó el vector [-2, 12] para el ángulo, variándolo en 2 y un paso para la traslación de 5.
Normalizada Estándar
Corte 12 preprocesado
Corte 7

68
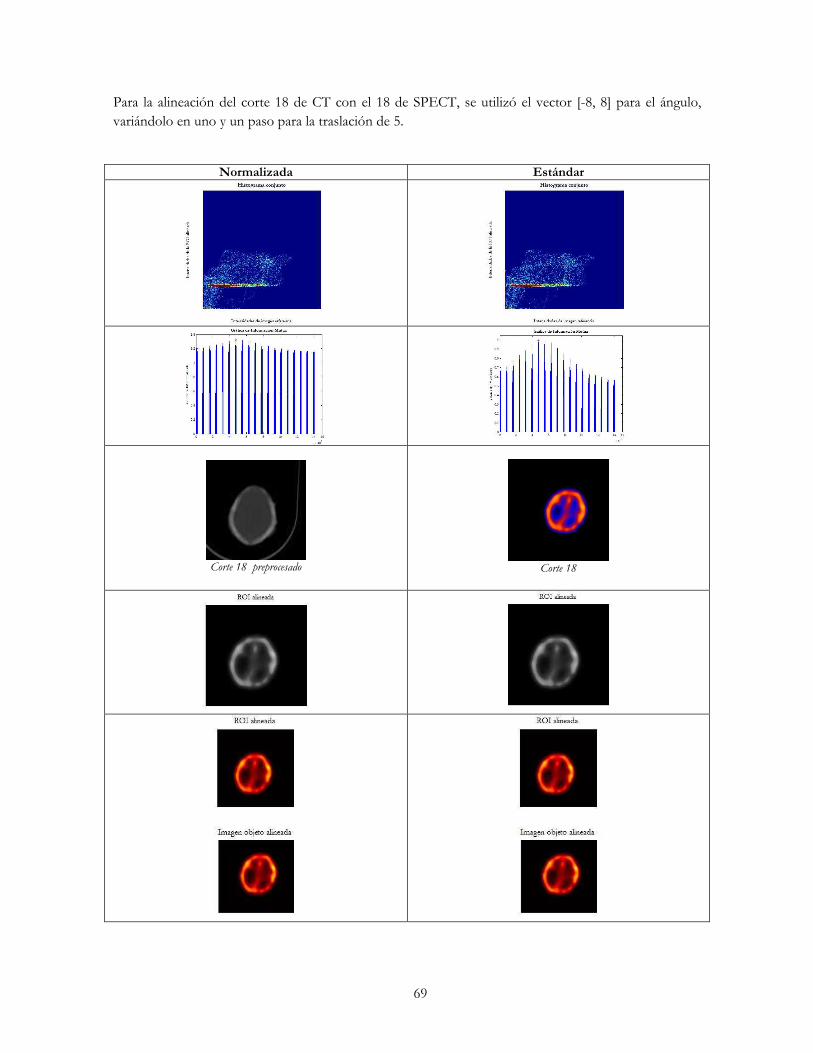
69
Para la alineación del corte 18 de CT con el 18 de SPECT, se utilizó el vector [-8, 8] para el ángulo, variándolo en uno y un paso para la traslación de 5.
Normalizada Estándar
Corte 18 preprocesado
Corte 18
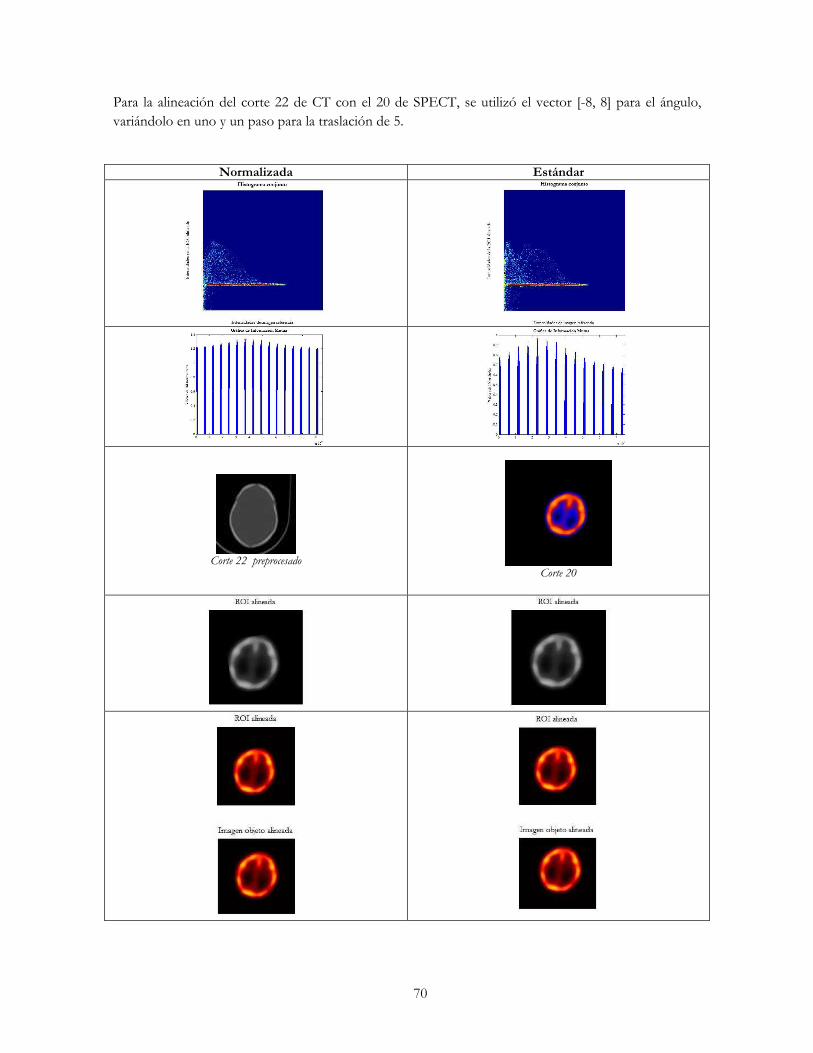
70
Para la alineación del corte 22 de CT con el 20 de SPECT, se utilizó el vector [-8, 8] para el ángulo, variándolo en uno y un paso para la traslación de 5.
Normalizada Estándar
Corte 22 preprocesado
Corte 20
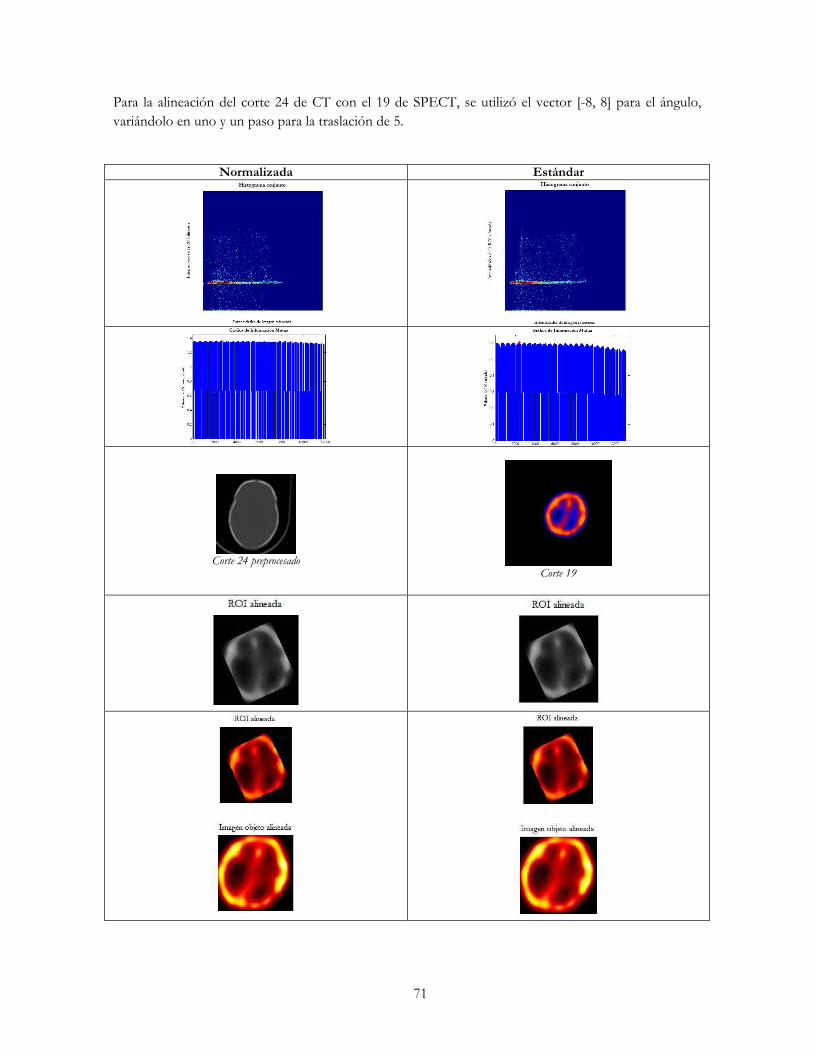
71
Para la alineación del corte 24 de CT con el 19 de SPECT, se utilizó el vector [-8, 8] para el ángulo, variándolo en uno y un paso para la traslación de 5.
Normalizada Estándar
Corte 24 preprocesado
Corte 19

72
Para la alineación del corte 32 de CT con el 11 de SPECT, se utilizó el vector [-8, 8] para el ángulo, variándolo en uno y un paso para la traslación de 5.
Normalizada Estándar
Corte 32 preprocesado
Corte 11