5. m rbibing.us.es/proyectos/abreproy/4943/fichero/5-modelos+reducidos.pdf · hasta 1960 el...
TRANSCRIPT

109
5. MODELOS REDUCIDOS
5.1. INTRODUCCIÓN
A lo largo de los años se ha prestado una considerable atención al desarrollo de
modelos simplificados que conduzcan a una correcta predicción de ciertas variables de
las máquinas eléctricas para fuertes variaciones en las condiciones de funcionamiento.
Hasta 1960 el comportamiento de las máquinas de inducción se calculaba
mediante las ecuaciones de tensión de régimen permanente y la relación dinámica entre
la velocidad del rotor y el par electromagnético.
Con la llegada de los ordenadores estos modelos han dejado paso a otras
representaciones más precisas. En algunos casos las ecuaciones se programan al detalle,
aunque para el cálculo del comportamiento de redes eléctricas lo que se utilizan son
modelos de orden reducido.
En particular es bastante común despreciar los transitorios eléctricos en las
ecuaciones de tensión del estátor de todas las máquinas y en las ecuaciones de tensión
de todos los componentes del sistema de potencia conectados al estátor
(transformadores, líneas de transmisión, etc.). Resulta muy económico en términos
computacionales considerar la representación estática de toda la parte correspondiente a
la alimentación.
Algunos autores han establecido ecuaciones de orden reducido sin despreciar la
influencia de los transitorios eléctricos del estátor y considerando despreciables otras
variables de la máquina o combinaciones de las mismas.
En este capítulo se van a desarrollar diversos modelos reducidos propuestos por
otros autores e incluso se va a modificar un modelo de forma que pueda ser útil para
máquina de inducción con el rótor alimentado. También se modificará algún modelo
para incluir la saturación de las coronas magnéticas.
En todos los casos se va a considerar que el sistema de alimentación es
equilibrado, si bien podrá variar tanto en amplitud como en frecuencia. También se
considera que el sistema de alimentación del rótor es convertido adecuadamente a la
frecuencia del mismo, por supuesto las tensiones también serán equilibradas y tanto el
ángulo entre fases de rótor y estátor como la amplitud podrán variar de la forma que se
estime oportuna.
5.2. MODELO DE QUINTO ORDEN
El modelo de quinto orden clásico es el modelo del cual se derivan el resto de
modelos reducidos. No es más que el mismo modelo visto en el Capitulo 4 teniendo en
cuenta que las tensiones de alimentación son equilibradas y escogiendo el sistema de
referencia síncrono.

5 Modelos Reducidos
110
Al ser las alimentaciones equilibradas las componentes 0 serán nulas, de esta
forma se pueden reescribir las ecuaciones de la máquina en forma compleja de la
siguiente manera:
s s b sra b v (5-1)
r r
rr s b
b
rnc vd d
(5-2)
1
2
rs L
b
re TH
(5-3)
Las corrientes del estator y del rotor vienen dadas por:
s s
s
r
r r
i s m
i m r
(5-4)
Donde:
( )
( ) ( )
( )
( ) ( )
1
2 ( )
( )
( )
b s lr M b s Me
ls lr M ls lr ls lr M ls lr
b r M b r ls Me
ls lr M ls lr ls lr M ls lr
Mn b
ls lr M ls lr
lr M
ls lr M ls l
r X X r Xa j b
X X X X X X X X X X
r X r X Xc d j
X X X X X X X X X X
Xd j e j
X X X X X
X Xs
X X X X X
( ) ( )
( )
r M
ls M ls lr M ls lr
ls lr M ls lr
Xm
X X X X X X Xr
X X X X X
r dr qr
r
s ds qs
s ds q rs q dr
j j
v v jv v jvv
Las ecuaciones (5-1) y (5-2) son las que gobiernan el sistema eléctrico, mientras
que la ecuación (5-3) gobierna el sistema mecánico. s re corresponde a la parte
real del producto de la constante e multiplicada por la conjugada de s y por r . En el
epígrafe 5.10 se contempla la inclusión de la saturación para lo que hará falta disponer
las ecuaciones en función del flujo mutuo.
5.3. MODELO DE TERCER ORDEN CLÁSICO
El método más común de reducción de orden consiste en considerar que las
variaciones del flujo del estátor son despreciables en la ecuación (5-1), lo que no quiere
decir que sean nulas, sino que la influencia en dicha ecuación no es de importancia.
Dicho de otro modo, lo que se hace es despreciar los transitorios eléctricos del estátor.
5 Modelos Reducidos
111
De esta forma, despejando se obtienen dos ecuaciones algebraicas y tres
ecuaciones diferenciales, con la reducción de orden correspondiente.
Si se desprecia la variación del flujo en el estátor y se despeja el valor del flujo
de la ecuación (5-1) queda:
1
rs b s
bv
a a (5-5)
Sustituyendo la ecuación (5-5) en las ecuaciones (5-2) y (5-3) se obtiene:
1 r
r n b s b r
b
r r
cda cb d v v
a a
(5-6)
1
2
rbr Lr rs
b
be ev T
H a a
(5-7)
Las ecuaciones (5-6) y (5-7) representan el modelo reducido de tercer orden
clásico. Para el cálculo de las intensidades se vuelve a sustituir la ecuación (5-5) ahora
en la ecuación (5-4) resultando:
rs b
r sr
s
b
sb si m v
a a
mi
b mr v
a a
(5-8)
Si se compara el modelo con el modelo completo, se aprecian una serie de
detalles importantes con los parámetros de las máquinas consideradas siendo los
indicados en el capítulo anterior en la Tabla 4-1.
En primer lugar, en las figuras 5-1 y 5-2 se aprecia la aproximación del modelo
de tercer orden, dibujado en rojo, provoca que la predicción del tiempo de arranque de
la máquina sea inferior al modelo de quinto orden. Esto es debido a que se han
despreciado los transitorios eléctricos del estátor, y en máquinas que tienen un tamaño
considerable estos transitorios tienen una importancia en el arranque directo que para la
consideración del tiempo no puede ser despreciada. Esto se ve claramente en la
oscilación de la velocidad del rotor en los primeros momentos del arranque.
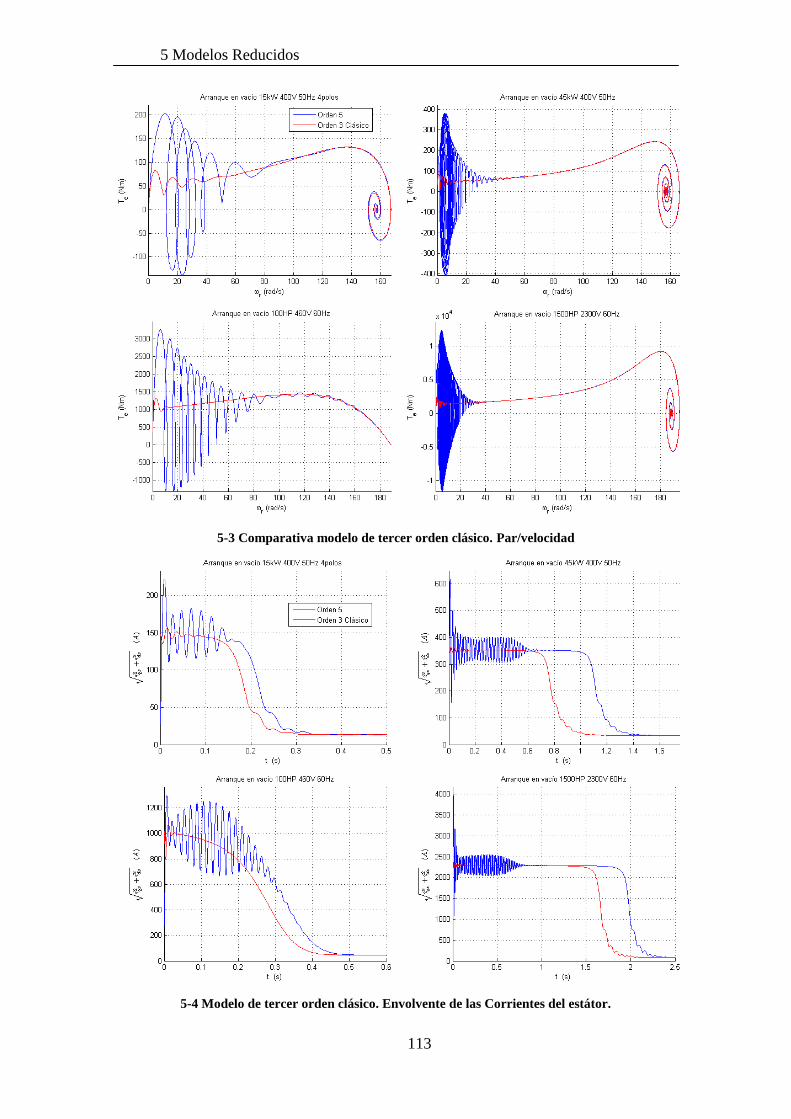
En cambio se aprecia para la velocidad del rotor ya relativamente cercana a la de
sincronismo, en la cual ya han desaparecido los transitorios eléctricos del estátor, como
la sobreoscilación alrededor del punto de sincronismo es prácticamente idéntica entre el
modelo completo y el modelo de tercer orden clásico. Esto se aprecia muy bien en la
curva de par frente a la velocidad del rótor para el arranque, que está representada en la
figura 5-3. Aquí se aprecia claramente como una vez desparecidos los transitorios
eléctricos del estátor las curvas tienden a ser prácticamente idénticas. En el momento
justo del arranque el modelo de tercer orden predice un transitorio muy inferior. En
conclusión este modelo tiene muy buena aproximación para transitorios mecánicos,
mientras que para los eléctricos durante el arranque no resulta tan apropiado.

5 Modelos Reducidos
112
5-1 Comparativa modelo de tercer orden clásico. Velocidad del rotor.
5-2 Comparativa modelo de tercer orden clásico. Par electromagnético.
5 Modelos Reducidos
113
5-3 Comparativa modelo de tercer orden clásico. Par/velocidad
5-4 Modelo de tercer orden clásico. Envolvente de las Corrientes del estátor.

5 Modelos Reducidos
114
En la figura 5-4, en la que se representa la envolvente de las intensidades del
estátor para el arranque en vacío, se aprecia nuevamente como el transitorio eléctrico
del arranque prácticamente desaparece, siendo reducido a un transitorio mucho más
suave. Por otro lado, como promedio de las intensidades de arranque este modelo si
representa bastante bien la evolución de las mismas, como se ve por el hecho de que la
línea roja sigua al promedio de la línea azul, salvo por el desfase de tiempo ya conocido.
Si se hace una comparativa de este modelo para un cortocircuito trifásico en
bornas, se aprecia como la evolución desde el régimen permanente cualitativamente
aproxima a la curva de par bastante bien, si bien desaparecen los transitorios oscilantes
del par electromagnético, conduciendo nuevamente a tiempos menores en la
estabilización de dicho par. En la figura 5-5 se puede observar estos efectos. Nada más
producirse el cortocircuito la máquina intenta compensar el cambio brusco en las
tensiones y por tanto en los flujos de la máquina, se generan unas intensidades muy
elevadas que generan un par electromagnético de frenado. Al despreciar los efectos de
la variación de flujo del estátor en la ecuación (5-1) el par transitorio de frenado debido
al cortocircuito es inferior. Al restaurar la tensión el efecto es el contrario y se pierde la
oscilación del par electromagnético, aunque su efecto en la velocidad del rótor es muy
pequeño.
5-5 Cortocircuito en bornas. Modelo Orden 3 Clásico. Par y velocidad.
Para esta simulación de cortocircuito en bornas se han escogido las máquinas de
45 kW y 100 HP por tener una característica de arranque totalmente distinta, la primera
subamortiguada y la segunda sobreamortiguada. Se ha simulado un cortocircuito de
doce ciclos completos de red, con un par resistente igual al par base de cada máquina y

5 Modelos Reducidos
115
una inercia de la carga de 4 kg·m2 para la máquina de 45 kW y de 8 kg·m
2 para la
máquina de 100 HP.
Asimismo en la figura 5-6 se ven los efectos que tiene sobre las intensidades el
despreciar los transitorios del flujo del estátor en las ecuaciones. Nuevamente la curva
es cualitativamente similar en el modelo de tercer orden clásico a la curva media tanto
en la envolvente de intensidades como en el factor de potencia, salvo por el tiempo en el
que se alcanzan las nuevas situaciones de régimen permanente.
5-6 Cortocircuito en Bornas. Modelo de orden 3 clásico. Envolvente de intensidades y factor de
potencia
Obviamente, al ser las tensiones aplicadas en el estátor nulas durante el
cortocircuito, la potencia consumida es nula y el factor de potencia carece de sentido,
por lo que no aparece representado en las curvas.
Para comprobar el funcionamiento del modelo con las variaciones de par
resistente, se ha simulado para las mismas dos máquinas de 45 kW y de 100 HP la
aplicación repentina, partiendo del régimen permanente en vacío, de una carga con un
par resistente igual al par base y con unas inercias de 1,2 kg·m2 y 2,22 kg·m
2
respectivas. Una vez alcanzada la nueva situación de régimen permanente se retira la
carga para que evolucione de nuevo a la situación de vacío.
El resultado es realmente preciso para este modelo en comparación con el
modelo completo, hasta tal punto que se hace muy complicado diferenciar las dos
curvas cuando se representan comparativamente en la misma gráfica. Esto hace que este
modelo resulte muy apropiado para las simulaciones de red en las que el interés

5 Modelos Reducidos
116
principal sea la simulación de los efectos producidos por las cargas aplicadas. Esto se
aprecia en las figuras 5-7 y 5-8.
5-7 Cambio brusco de par. Modelo orden 3 clásico. Par y velocidad.
5-8 Cambio brusco de par. Modelo orden 3 clásico. Envolvente de intensidades del estátor y factor
de potencia.

5 Modelos Reducidos
117
En el caso de que haya sistemas de frecuencia variable, se puede comparar el
efecto que tendría un cambio brusco de frecuencia. Así, se puede simular un aumento
repentino de la frecuencia de un 10% y cuando se alcance el régimen permanente
retornar a la frecuencia original. Escogiendo las mismas máquinas con una carga
aplicada de un par resistente igual a la mitad del par base, con unas inercias de la carga
de 0,6 kg·m2 para la máquina de 45 kW y de 1,11 kg·m
2 para la de 100 HP. Lo que se
observa en la figura 5-9 es que la variación experimentada en el par debido a los
cambios repentinos de frecuencia no tiene una componente oscilante tan fuerte como en
el arranque y por tanto el modelo tiende a seguirlo de una manera más fiel, no
observándose diferencias muy apreciables en la velocidad del rótor.
5-9 Aumento brusco de frecuencia. Modelo orden 3 Clásico. Par y velocidad.
Es de esperar por tanto que tampoco haya unas diferencias excesivas en las
envolventes de las corrientes del estátor, ni en el factor de potencia al ser comparadas
con las mostradas por el modelo de quinto orden completo. De hecho salvo el rizado
que aparece en las curvas del modelo completo el ajuste de este modelo reducido es
muy bueno tal y como se muestra en la gráfica 5-10.
Se puede concluir que este modelo ajusta muy bien las variaciones de las cargas
para cualquier parámetro, no ajustando tan bien los transitorios originados por
variaciones eléctricas, si bien la evolución promedio de las mismas si resulta muy
aproximado. Además, si se obvia el arranque de la máquina en vacío, la influencia del
par oscilante que permanentemente aparece en cambios bruscos de magnitudes

5 Modelos Reducidos
118
eléctricas es pequeña en la velocidad del rótor, lo que unido a su simplicidad hace que
sea apropiado para estudios de estabilidad.
5-10 Aumento brusco de frecuencia. Modelo Orden3 clásico. Envolvente de intensidades del estátor
y factor de potencia.
5.4. MODELO DE PRIMER ORDEN CLÁSICO
Es posible, a partir de las ecuaciones del modelo de tercer orden clásico, ir un
paso más allá y considerar despreciables las derivadas del flujo del rotor, considerando
que no tienen influencia en la ecuación (5-6). En ese caso haciendo 0r en (5-6) y
despejando r
b s b r
r rn
b b
r
n
c av v
da cb ad da cb ad
(5-9)
Ahora, sustituyendo (5-9) en (5-7) se obtiene la nueva ecuación mecánica

5 Modelos Reducidos
119
2
2
1
2
br rn s s
b br
n
b
rn r s r r L
b
ec d d v vH
da cb ad
e ad bc ad v v eabv v T
(5-10)
Se sustituye la ecuación (5-9) en la ecuación (5-8) para obtener las intensidades:
rn
bs b s b r
r rn n
b b
rn
br b s b r
r rn n
b b
cm sd sdma sb
i v v
da cb ad da cb ad
cr md mdar mb
i v v
da cb ad da cb ad
(5-11)
Este modelo corresponde al modelo clásico de los motores de inducción, en el
que las ecuaciones eléctricas vienen dadas por los valores del circuito equivalente de
régimen permanente y la mecánica por una ecuación diferencial de primer orden.
De primeras se puede pensar que si el modelo de tercer orden pudiera no ser
excesivamente preciso para transitorios eléctricos, este modelo de primer orden lo será
aún menos, ya que deshecha todavía más información de las ecuaciones al despreciar las
variaciones de los flujos del rótor.
Al evaluar el arranque en vacío para las cuatro mismas máquinas que en el
modelo de tercer orden lo primero que se observa en las figuras 5-11 y 5-12 es la
completa desaparición del rizado del arranque, tanto en el par como en la velocidad del
rótor. Curiosamente el siguiente efecto que se aprecia es que no hay sobreoscilación
alrededor del punto de régimen permanente en vacío y el tiempo que predice el modelo
de primer orden para la evolución desde el arranque al régimen permanente es todavía
menor que el modelo de tercer orden, y por tanto más erróneo.
Destacable es también como el modelo de primer orden predice un par máximo
mayor que en el modelo completo y el de tercer orden, que predecían el mismo par. La
excepción a esto es la máquina de 100 HP, cuyo comportamiento, conviene recordar,
era sobreamortiguado. En esta máquina la diferencia con el modelo de tercer orden es
mucho menor que en las otras, y es principalmente la pequeña oscilación que existía en
el par durante los primeros instantes del arranque en el modelo de tercer orden.
Cuando lo que se evalúa es la característica par velocidad durante el arranque en
la figura 5-13 se pone de manifiesto aún más si cabe la diferencia del par máximo en las
máquinas subamortiguadas y la no sobreoscilación de este modelo, así como la buena
aproximación en la evolución promedio del mismo en la máquina sobreamortiguada
(100 HP).

5 Modelos Reducidos
120
5-11 Comparativa modelo de primer orden clásico. Velocidad del rotor.
5-12 Comparativa modelo de primer orden clásico. Par electromagnético.

5 Modelos Reducidos
121
5-13 Comparativa modelo de primer orden clásico. Par velocidad.
5-14 Comparativa modelo de primer orden clásico. Envolvente de las intensidades.

5 Modelos Reducidos
122
La falta de oscilación alrededor del punto de equilibrio de régimen permanente
en vacío de las máquinas de 15 kW 45 kW y 1500 HP, provoca en las corrientes del
estátor una aproximación más abrupta al nuevo punto de equilibrio (figura 5-14), tal y
como ocurre con el par electromagnético y la velocidad del rótor en las figuras
anteriores.
De hecho si lo que se observa es la evolución de la intensidad y del factor de
potencia con respecto a la velocidad angular del rótor (figuras 5-15 y 5-16), lo que se
observa es como esa evolución más abrupta al punto de equilibrio y sin sobreoscilación,
predicha por el modelo de primer orden, crea una diferencia en la aproximación al punto
de equilibrio nuevo con respecto al modelo completo de cierta importancia. En cambio
durante los primeros instantes del arranque las curvas siguen de una forma bastante fiel
la evolución del promedio.
Merece la pena destacar la evolución de la máquina de 100 HP, que como ya se
sabía tiene una evolución hacia los nuevos puntos de trabajo sobreamortiguada. Este
modelo representa con bastante buena aproximación dicha evolución, salvo por la
oscilación de los conocidos transitorios eléctricos durante los primeros instantes del
arranque, lo que unido a la elevada simplificación de las ecuaciones, al pasar de un
sistema de cinco ecuaciones diferenciales a una sola ecuación diferencial y cuatro
ecuaciones algebraicas, lo hacen bastante apropiado para la representación de este tipo
de máquinas.
5-15 Comparativa modelo orden 1 clásico. Envolvente de intensidades frente a velocidad del rótor.
Arranque en vacío.

5 Modelos Reducidos
123
5-16 Comparativa modelo orden 1 clásico. Factor de potencia frente a velocidad del rótor.
Arranque en vacío
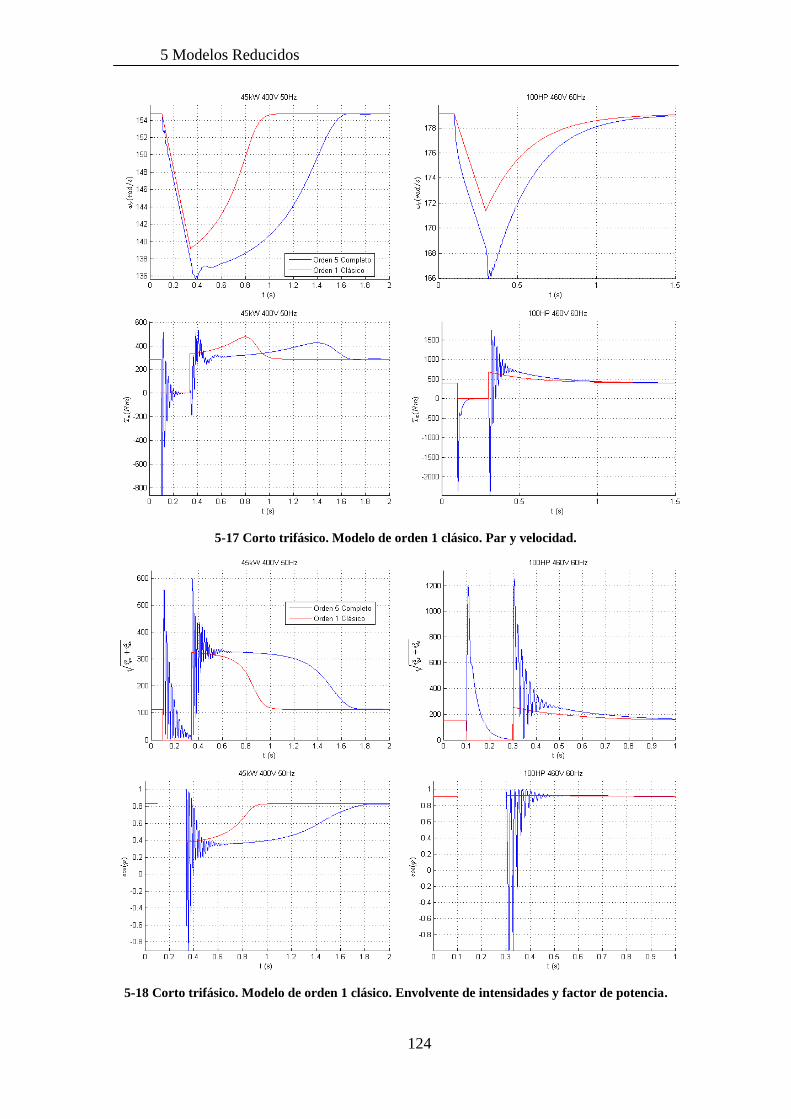
A la hora de considerar un cortocircuito trifásico en bornas de doce ciclos de red
completos, se contemplan las dos máquinas de 45 kW y 100 HP con un par resistente
igual al par base y con una inercia de la carga resistente de 4 kg·m2 y 8 kg·m
2
respectivamente.
En las figuras 5-17 y 5-18 se encuentra representada la evolución de las dos
máquinas en cuestión, tanto para el par como para la velocidad angular, así como la
envolvente de las intensidades y el factor de potencia, para el modelo de primer orden
comparativamente con el modelo de quinto orden. Se puede apreciar en ellas que no
aparece el par de frenado de los primeros instantes del cortocircuito, sino que
directamente el modelo pasa a una situación de par nulo y el freno que experimenta el
motor según este modelo se debe exclusivamente al par resistente aplicado. Asimismo,
las intensidades del estátor resultan nulas, y por carecer de sentido el factor de potencia
no aparece este representado durante el tiempo que dura el cortocircuito.
Al eliminar el cortocircuito en bornas y reponer la tensión nominal al cabo de los
doce ciclos completos de red, la máquina vuelve a generar un par electromagnético que
acelera la máquina hasta el punto de partida original. Nuevamente, se aprecia como el
modelo de primer orden ajusta mejor a la máquina sobreamortiguada, por ser esta de
evolución más simple hacia los nuevos puntos de equilibrio. En ambos casos no
aparece, como era de esperar la oscilación de frecuencia más alta debida a los
transitorios eléctricos, que se experimentan con el modelo de quinto orden.
5 Modelos Reducidos
124
5-17 Corto trifásico. Modelo de orden 1 clásico. Par y velocidad.
5-18 Corto trifásico. Modelo de orden 1 clásico. Envolvente de intensidades y factor de potencia.
5 Modelos Reducidos
125
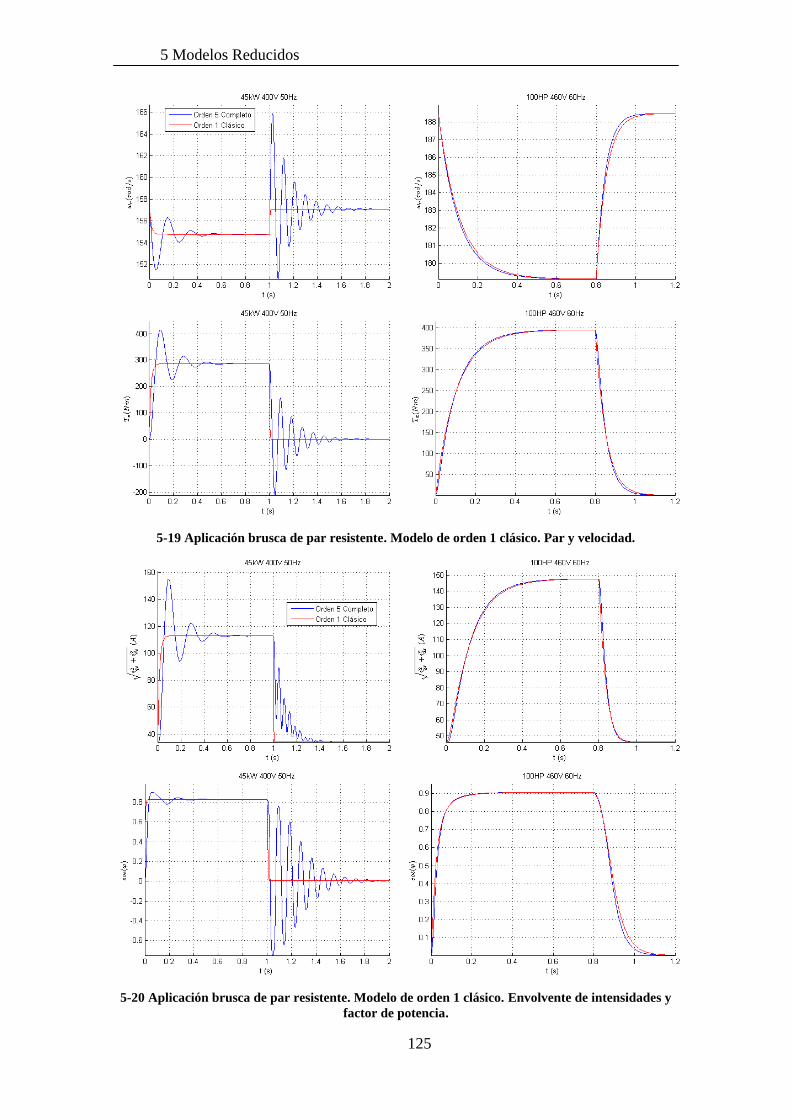
5-19 Aplicación brusca de par resistente. Modelo de orden 1 clásico. Par y velocidad.
5-20 Aplicación brusca de par resistente. Modelo de orden 1 clásico. Envolvente de intensidades y
factor de potencia.
5 Modelos Reducidos
126
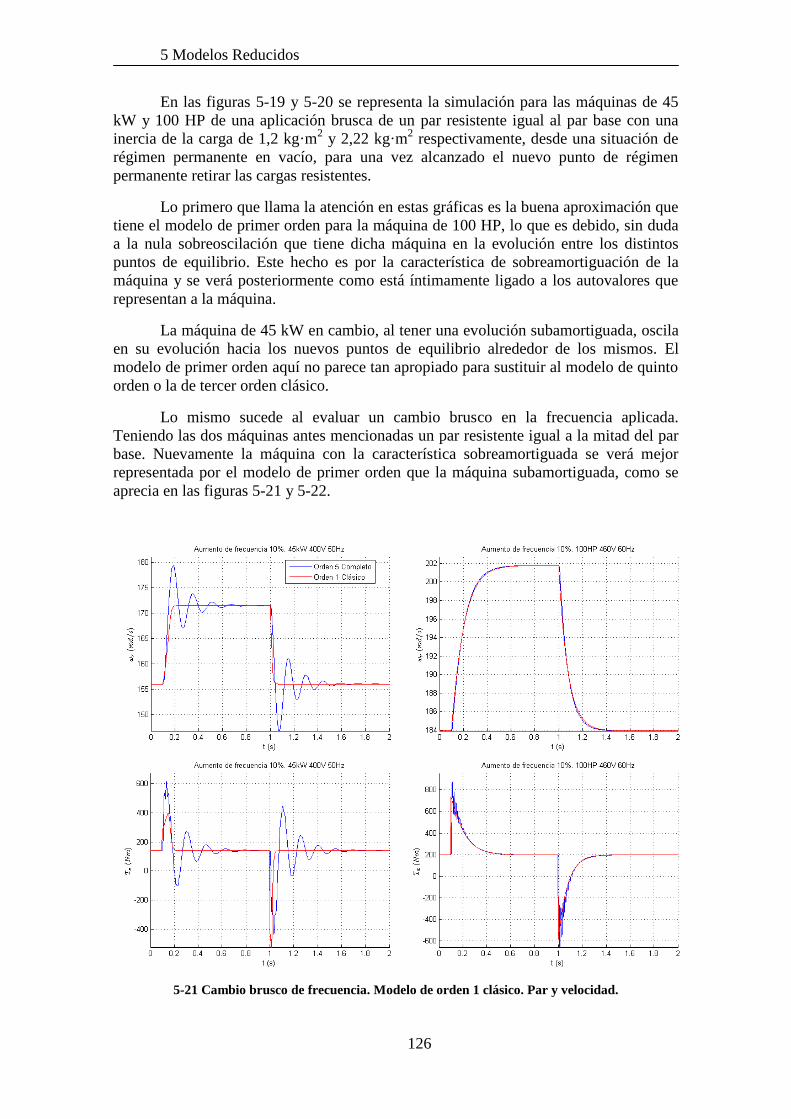
En las figuras 5-19 y 5-20 se representa la simulación para las máquinas de 45
kW y 100 HP de una aplicación brusca de un par resistente igual al par base con una
inercia de la carga de 1,2 kg·m2 y 2,22 kg·m
2 respectivamente, desde una situación de
régimen permanente en vacío, para una vez alcanzado el nuevo punto de régimen
permanente retirar las cargas resistentes.
Lo primero que llama la atención en estas gráficas es la buena aproximación que
tiene el modelo de primer orden para la máquina de 100 HP, lo que es debido, sin duda
a la nula sobreoscilación que tiene dicha máquina en la evolución entre los distintos
puntos de equilibrio. Este hecho es por la característica de sobreamortiguación de la
máquina y se verá posteriormente como está íntimamente ligado a los autovalores que
representan a la máquina.
La máquina de 45 kW en cambio, al tener una evolución subamortiguada, oscila
en su evolución hacia los nuevos puntos de equilibrio alrededor de los mismos. El
modelo de primer orden aquí no parece tan apropiado para sustituir al modelo de quinto
orden o la de tercer orden clásico.
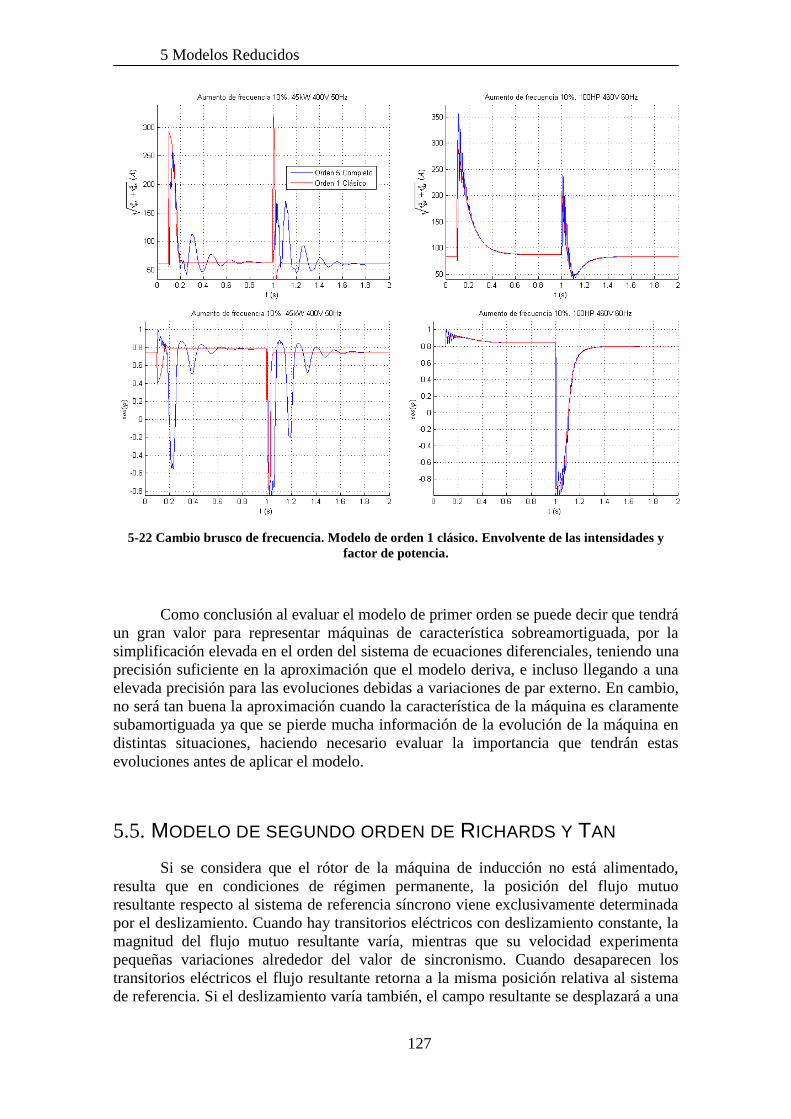
Lo mismo sucede al evaluar un cambio brusco en la frecuencia aplicada.
Teniendo las dos máquinas antes mencionadas un par resistente igual a la mitad del par
base. Nuevamente la máquina con la característica sobreamortiguada se verá mejor
representada por el modelo de primer orden que la máquina subamortiguada, como se
aprecia en las figuras 5-21 y 5-22.
5-21 Cambio brusco de frecuencia. Modelo de orden 1 clásico. Par y velocidad.
5 Modelos Reducidos
127
5-22 Cambio brusco de frecuencia. Modelo de orden 1 clásico. Envolvente de las intensidades y
factor de potencia.
Como conclusión al evaluar el modelo de primer orden se puede decir que tendrá
un gran valor para representar máquinas de característica sobreamortiguada, por la
simplificación elevada en el orden del sistema de ecuaciones diferenciales, teniendo una
precisión suficiente en la aproximación que el modelo deriva, e incluso llegando a una
elevada precisión para las evoluciones debidas a variaciones de par externo. En cambio,
no será tan buena la aproximación cuando la característica de la máquina es claramente
subamortiguada ya que se pierde mucha información de la evolución de la máquina en
distintas situaciones, haciendo necesario evaluar la importancia que tendrán estas
evoluciones antes de aplicar el modelo.
5.5. MODELO DE SEGUNDO ORDEN DE RICHARDS Y TAN
Si se considera que el rótor de la máquina de inducción no está alimentado,
resulta que en condiciones de régimen permanente, la posición del flujo mutuo
resultante respecto al sistema de referencia síncrono viene exclusivamente determinada
por el deslizamiento. Cuando hay transitorios eléctricos con deslizamiento constante, la
magnitud del flujo mutuo resultante varía, mientras que su velocidad experimenta
pequeñas variaciones alrededor del valor de sincronismo. Cuando desaparecen los
transitorios eléctricos el flujo resultante retorna a la misma posición relativa al sistema
de referencia. Si el deslizamiento varía también, el campo resultante se desplazará a una

5 Modelos Reducidos
128
posición distinta correspondiente al nuevo deslizamiento. Esta idea es desarrollada por
Gill Richards y Owen Tan en [6].
Los cambios en la amplitud del flujo mutuo se corresponden con cambios de
amplitud en las corrientes y tensiones inducidas en los devanados del estátor, mientras
que la variación de velocidad del flujo produce variaciones de frecuencia y amplitud en
dichas corrientes y tensiones. Si se asume que el segundo efecto es despreciable, se
puede decir que en cualquier momento la relación dr qr solo depende del valor
instantáneo de deslizamiento. Entonces como el flujo resultante del rótor es
2 2 2
Re Imr r r r r (5-12)
entonces
Re Re Im Im
2
r rr r r r r r r r
r
r r r
(5-13)
Ahora considerando la relación constante dr qr y dado que se puede elegir el
ángulo inicial del sistema de referencia, es posible calcular de los valores dr r y
qr r del régimen permanente mediante la ecuación (5-9), para ello se impone que
0qsv , de forma que la tensión de alimentación no tiene componente imaginaria,
r rn n
b br
rr rn n
b b
ad cb ad ad cb ad
ad cb ad ad cb ad
(5-14)
Sustituyendo (5-6) en (5-13) teniendo en cuenta (5-14)
1
rn
br r b s
rn
b
ad cb ad
da cb c va
a ad cb ad
(5-15)
y ahora (5-14) en (5-7)
21
2
rn
brr b r s L
b rn
b
ead cb ad
abev T
H aad cb ad
(5-16)
Las ecuaciones (5-15) y (5-16) forman un sistema de ecuaciones diferenciales de
segundo orden. Una vez calculados los valores de r y r se puede calcular r de
(5-14),

5 Modelos Reducidos
129
rn
br r
rn
b
ad cb ad
ad cb ad
(5-17)
s puede ser calculado a partir de (5-5) como
1r
n
bs r b s
rn
b
ad cb adb
va a
ad cb ad
(5-18)
y las intensidades si e ri de (5-8), con el siguiente resultado
rn
bs r b s
rn
b
rn
br r b s
rn
b
ad cb adsb s
i m va a
ad cb ad
ad cb admb m
i r va a
ad cb ad
(5-19)
Lo primero que se aprecia en este modelo por simple observación de sus
ecuaciones es que en no aparece por ningún sitio la tensión aplicada al rótor. Esto es
debido a que el modelo considera el rotor cortocircuitado desde el primer momento en
que se plantean las ecuaciones, y por ende este modelo solo será aplicable para
situaciones en las que el rótor no esté alimentado.
Si se evalúan los resultados de un arranque en vacío de las máquinas de 15 kW,
45 kW, 100 HP y 1500 HP especificadas anteriormente, se puede apreciar en las figuras
5-23, 5-24, 5-25 y 5-26 como la evolución hacia el punto de régimen permanente de las
máquinas subamortiguadas es mucho menos abrupta que en el modelo de orden 1
clásico dado en las figuras 5-11, 5-12, 5-13 y 5-14, si bien han desaparecido las
sobreoscilaciones que aparecían en el modelo de tercer orden clásico y en el modelo de
quinto orden. Además el punto de par máximo representa un valor inferior en este
modelo que en el de primer orden, y más próximo al punto “real” dado por el modelo de
quinto orden completo.
Nuevamente, y al derivarse este modelo del modelo de tercer orden clásico, los
transitorios eléctricos oscilatorios del arranque no están presentes, desapareciendo los
rizados de las curvas de los primeros instantes, si bien hay que hacer notar que el par
electromagnético parte del valor 0 en el primer instante, cosa que no ocurría en el
modelo de primer orden, si bien alcanza rápidamente el valor promedio de la curva del
modelo completo con bastante buena aproximación.

5 Modelos Reducidos
130
5-23 Comparativa modelo orden 2 de Richards & Tan. Par electromagnético.
5-24 Comparativa modelo orden 2 de Richards & Tan. Velocidad del rótor.

5 Modelos Reducidos
131
5-25 Comparativa modelo orden 2 de Richards & Tan. Característica par-velocidad.
5-26 Comparativa modelo orden 2 de Richards & Tan. Envolvente de las intensidades.

5 Modelos Reducidos
132
En la figura 5-25, que representa la curva característica durante el arranque en
vacío, se aprecia perfectamente lo dicho anteriormente, y presenta unas curvas más
aproximadas a las dadas por el modelo completo que en el caso del modelo de primer
orden clásico, si bien carecen de la buena precisión que presenta el modelo de tercer
orden.
Mención aparte merece el caso de la máquina sobreamortiguada de 100 HP, en
la cual no se aprecia mejora alguna significativa con respecto al modelo de primer orden
clásico, con lo que la complejidad añadida de tener una ecuación diferencial más no
aporta apenas ventajas.
En todos los casos el modelo tiene un adelanto en tiempo del arranque en vacío
inferior a los dos modelos vistos anteriormente, debido principalmente al menor par
máximo predicho por este modelo y a partir de un valor nulo de par.
Al simular un cortocircuito trifásico en bornas durante seis ciclos de red para las
máquinas de 45 kW y 100 HP descritas anteriormente, se aprecia en las figuras 5-27 y
5-28 como el par sigue de una forma razonable al modelo de quinto orden, salvo por el
rizado de la curva. Aparece nuevamente el par de frenado de los primeros instantes del
cortocircuito, en oposición al modelo de primer orden, aunque en menor medida que el
modelo completo. Al eliminar el cortocircuito, la máquina desarrolla un par
electromagnético que si bien no ajusta tan bien como el modelo de tercer orden, la
buena aproximación de la envolvente de intensidades del estator a la media del modelo
de quinto orden hacen que esta reducción de orden sea bastante buena si los valores
requeridos para la simulación no son los valores de pico, sino una evolución cualitativa
de la máquina.
5-27 corto trifásico. Modelo de orden 2 de Richards & Tan. Par y velocidad.

5 Modelos Reducidos
133
5-28 Corto trifásico. Modelo de orden 2 de Richards & Tan. Envolvente de las intensidades y factor
de potencia.
Nuevamente en la máquina de 100 HP no se aprecia mejoría significativa con
respecto a las simulaciones de cortocircuito del modelo de primer orden.
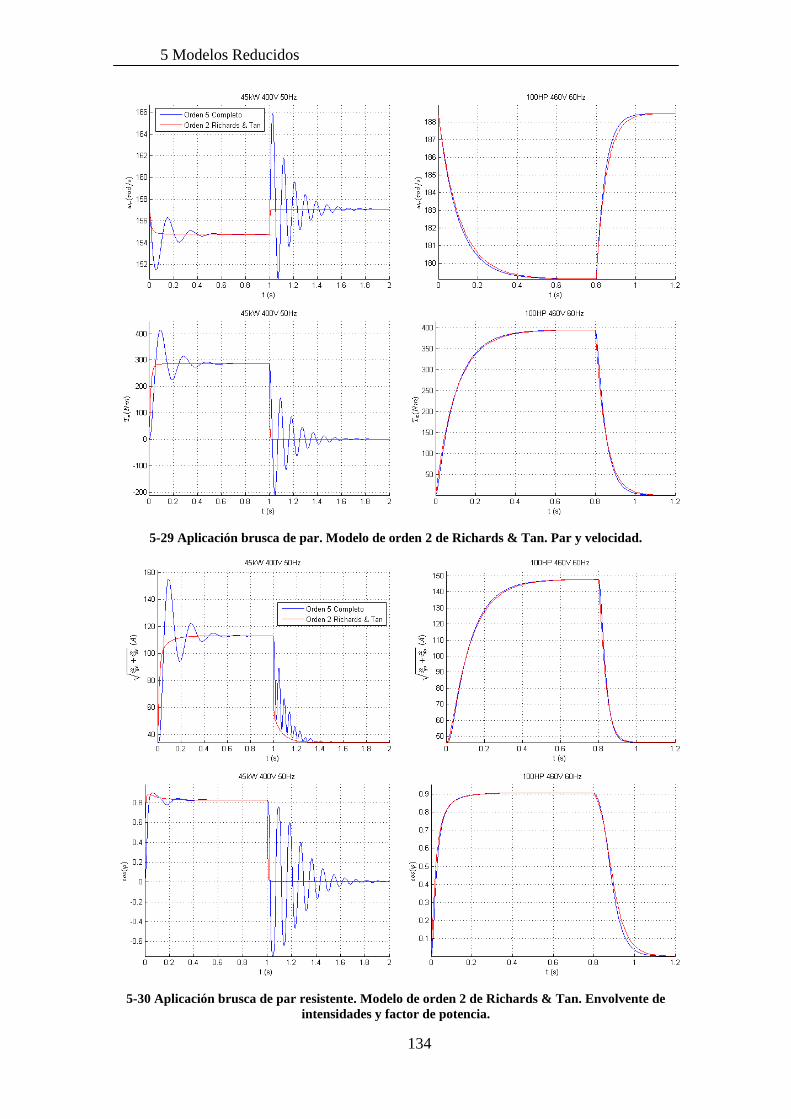
En una simulación de cambio brusco de par, partiendo de régimen permanente
en vacío y aplicando repentinamente un par resistente igual al par base con unas inercias
de las cargas de 1,2 kg·m2 y 2,22 kg·m
2 para las máquinas de 45 kW y 100 HP
respectivamente, no se aprecian cambios importantes con respecto al modelo de primer
orden clásico en lo que respecta a la evolución del par, tal y como muestra la figura 5-29
y más al compararla con la figura 5-19.
En cambio sí se aprecia una evolución más próxima al modelo de quinto orden
en las envolventes de las intensidades y en el factor de potencia representados en la
figura 5-30, mejorando para la máquina de 45 kW con lo previsto por el modelo de
primer orden clásico, si bien no tiene la evolución oscilatoria del modelo de tercer orden
clásico.
Otra vez vuelve a repetirse el hecho, cada vez más significativo de la poca
diferencia entre los modelos para la máquina de 100 HP, y el poco beneficio que aporta
este modelo a la máquina sobreamortiguada.
En la simulación de cambio de frecuencia, se ha aumentado la misma un 10%
para, una vez alcanzado el nuevo régimen permanente, revertir la situación. La
simulación se ha realizado con un par resistente igual a la mitad del par base, para las
máquinas de 45 kW y 100 HP, y con una inercia de la carga de 0,6 kg·m2 y 0,11 kg·m
2
respectivamente. La simulación está representada en las figuras 5-31 y 5-32.
5 Modelos Reducidos
134
5-29 Aplicación brusca de par. Modelo de orden 2 de Richards & Tan. Par y velocidad.
5-30 Aplicación brusca de par resistente. Modelo de orden 2 de Richards & Tan. Envolvente de
intensidades y factor de potencia.

5 Modelos Reducidos
135
5-31 Cambio brusco de frecuencia. Modelo de orden 2 de Richards & Tan. Par y velocidad.
5-32 Cambio brusco de frecuencia. Modelo de orden 2 de Richards & Tan. Envolvente de
intensidades y factor de potencia.

5 Modelos Reducidos
136
De nuevo, la máquina subamortiguada (45 kW) presenta una evolución
promedio más suavizada que en el modelo de primer orden clásico, y tampoco presenta
las oscilaciones que aparecen en el modelo de quinto orden y que sí figuran en el
modelo de tercer orden clásico. Siguiendo la pauta hasta ahora vista, no aparece un
beneficio claro en usar el modelo de segundo orden para predecir la evolución de la
máquina sobreamortiguada (100 HP).
Como conclusión de este modelo se puede decir que para las máquinas
subamortiguadas, presenta una mejora de la previsión con respecto al modelo de primer
orden clásico, a costa de introducir una ecuación diferencial más que éste. Para
transitorios eléctricos y arranque se tendrá una mejora significativa con respecto al
modelo de primer orden clásico, mientras que para cambios de par y de frecuencia, si
bien existe una mejora, no es tan grande.
En lo que se refiere a la máquina sobreamortiguada, no se aprecia un beneficio
en la previsión de esté modelo con respecto al modelo de primer orden clásico, y por
tanto no arroja una mejora al introducir una ecuación diferencial más.
5.6. MODELO DE TERCER ORDEN REFINADO
F.D. Rodríguez y O. Wasynczuk proponen en [7] un método para obtener un
modelo reducido de tercer orden mediante la separación de componentes rápidas de
componentes lentas de los flujos del estator, si bien este método presenta una
complicación en cuanto a la formulación de las ecuaciones, esta se ve contrarrestada por
el comportamiento del propio modelo a la hora de predecir la respuesta del motor ante
diversas perturbaciones como un salto en la tensión aplicada o cortocircuitos en el
estator.
El método descrito en [7] contiene una errata atribuible probablemente a la
transcripción, conduciendo a una formulación de las ecuaciones finales no del todo
correcta, sin embargo la metodología seguida es perfecta, habiéndose simplemente
subsanado en este proyecto el error en dicho documento y adaptado las ecuaciones a la
terminología aquí utilizada.
En el modelo de tercer orden clásico se desprecian las variaciones del flujo del
estator, por considerar que la influencia de estas variaciones en la dinámica de la
máquina de inducción desaparece de una manera muy rápida al comparar con el resto de
variables que componen la mencionada dinámica.
En realidad, los flujos y sus variaciones se pueden separar en dos partes, una,
que se denomina componente rápida, y cuya variación desaparece en un pequeño lapso
de tiempo, comparativamente hablando, y otra que es la componente lenta cuya
variación tarda algo más en desaparecer.
De esta forma, el modelo de tercer orden clásico al despreciar las variaciones del
flujo del estátor, desprecia por igual las variaciones de las componentes lentas y rápidas
de dicho flujo estatórico. Para evitar esto y corregirlo de algún modo, el método
propone separar los flujos del estator en la suma de componentes rápidas y lentas de la
siguiente forma.

5 Modelos Reducidos
137
*f
s s s (5-20)
Donde f
s representa las componentes rápidas y *
s las componentes lentas de
los flujos estatóricos. Sustituyendo *
s en la ecuación (5-20) por el valor de la ecuación
(5-5):
1f
s s r b s
bv
a a (5-21)
Sustituyendo en (5-2) se obtiene:
f r
r s r n r b s b r
b
ad bc cc d v v
a a
(5-22)
Se puede expresar la ecuación electromecánica en función de f
s
1
2
frs r r r b s r L
b
eb ee v T
H a a
(5-23)
Se escribe ahora la ecuación del estator en términos de f
s sustituyendo el valor
de s dado por la ecuación (5-21) en la ecuación (5-1), de esta manera
1 1f
s r b s r b s s r b s
b b a av v a b v
a a a a a a (5-24)
Sustituyendo ahora la ecuación (5-22) en (5-24)
2f f n b b br
s s r r s r s
b
bd ba bc ad bc a b bc av v v
a a a a a a a a a a
(5-25)
De momento no se ha hecho ninguna aproximación y por tanto estas ecuaciones
son del mismo orden que las del modelo de quinto orden clásico. Esto quiere decir que
caracterizan de igual manera la dinámica de la máquina de inducción. Lo único
destacable es que el vector de estado original s ha sido sustituido por f
s , que
corresponde a la componente rápida de s .
Como solo interesa la componente lenta de la respuesta, se desprecia la derivada
de la componente rápida del flujo del estátor, realizando esto en la ecuación (5-25) y
despejando f
s :
2 2 2
2 2
f nrs r r b s
b
b br s
ad bc a a bcbbda a a a v
a bc a bc a bc
bv v
a bc a bc
(5-26)
Sustituyendo ahora (5-26) en (5-22)

5 Modelos Reducidos
138
2 2
2 2 22 2
b n brr s r r b s r
b
a aa ad bc bc ca c
c a d aa av v va bc a bc a bca bc a bc
(5-27)
Para poner esta ecuación en la forma convencional de variables de estado se
puede realizar el siguiente cambio de variable:
2r b s
cx v
a bc
(5-28)
Sustituyendo en (5-27) y agrupando se obtiene la ecuación de estado en función
de la nueva variable de estado
2 22
222 2
2 2
2 22
3 2nr
b s
b
nrb s b r
b
a aa ad bc bc a c a d c a bc
a da ax x x va bca bc a bc
a cd av v
a bca bc
(5-29)
Se sustituye ahora r de la ecuación (5-28) en la ecuación (5-26) para obtener
las componentes rápidas del flujo por segundo del estátor en función de la nueva
variable de estado
2
22 2 2
2 2 22
2
1
f nrs b s
b
nrb s b r b s
b
ad bc a ab bc a d a bcbda a ax x v
a bc a bc a bc
bcd bv v v
a bc a bca bc
(5-30)
De modo que ahora se calcula a partir de (5-21), (5-30) y (5-28) el flujo por
segundo total del estátor en función de la nueva variable.
3 2
22 2 2
2 2 22
2
1
nrs b s
b
nrb s b r b s
b
a ad a b bcd a a bcbda ax x v
a bc a bc a bc
bcd bv v v
a bc a bca bc
(5-31)
Tomando ahora la ecuación mecánica (5-3), teniendo en cuenta que la parte real
de un número complejo es igual a la de su conjugado y que e e , por ser imaginario
puro

5 Modelos Reducidos
139
1
2
rs r L
b
e TH
(5-32)
y a partir de (5-31) y (5-28)
2 2
3 2
22 2 2
2 2 2 2
2
1
2
2
1 1
nr r
b b
b s
nrb s b r
b
b
ad a b
bdae x x x x
H a bc a bc
a ad a bc a bcd a bca a v x
a bc a bc a bc
bcd bv x v x
a bc a bc a bc a bc
b
2 3 2
2
2 222 2 2
2
2 22 2
2
1
nrs s b s s
b
b r s b b s s L
ac d a c c a bc
bcdca v v v va bca bc a bc a bc
c b cv v x v v T
a bc a bca bc a bc
(5-33)
El término que contiene la derivada de la tensión del estátor puede ser expresado
como:
22
2
22 2
1
2
1 1
2 2
b b s s
b s b s s
e cx v v
H a bc a bc
e ecx v v v
H Ha bc a bc a bc
(5-34)
Se puede comprobar que si se escoge el sistema de referencia de modo que sv
tenga un valor real sin componente imaginaria el segundo término de la parte derecha de
la ecuación (5-34) es nulo, ya que el producto solo contiene parte imaginaria. Este
sistema de referencia coincide con el sistema de referencia síncrono. De esta forma se
puede expresar dicha ecuación como

5 Modelos Reducidos
140
22 2
2 2
2 22 2
1 1
2 2
1
2
1 2
2
b b s s b s
b s b s
b s b s b s
e c ex v v x v
H Ha bc a bca bc
e d ex v x v
H dta bc a bc
d e aae ex v x v v x
H dt a bc a bc a bc
(5-35)
Sustituyendo (5-29) en (5-35) y esta última en (5-33) y reorganizando
2 2 2
2 3 2
22 2 2
2 2 2 2
2 2
1 1
2 2
2 2 3 2
2
b nr rs
b b
b s
nrb
b
ad a
e bdd ax v e bx x x xdt H Ha bc a bc a bc
a abc a d abc bc a bcd a bc
a a v xa bc a bc a bc
a bc a b cd
a bc a
2
2 3 22
2 2
2 22 2 2 2
22
2 2 2
2 4
s
nrb s s b s s
b
b r b r s L
v xbc a bc
abc a cd a c c a bc bc a cda v v v v
a bc a bc a bc a bc
b a bcv x v v T
a bc a bc a bc
(5-36)
Haciendo lo mismo con la ecuación mecánica (5-23) y a partir de (5-30) y
reagrupando términos, teniendo en cuenta además que se puede elegir el origen del
sistema de referencia, se hace de forma que la tensión del estátor sea una variable sin
componente imaginaria como se ha especificado anteriormente, además se tiene en
cuenta que la parte real de un valor complejo es igual a la del valor complejo conjugado.
Se puede definir una nueva variable ahora,
2
1
2
rb s
b
ex x v
H a bc
(5-37)
Sustituyendo (5-37) en (5-36) y teniendo en cuenta lo dicho en el párrafo
anterior se puede reescribir la ecuación mecánica como:

5 Modelos Reducidos
141
2 3 2
22 2 2
2 2 2 2
2 2 2 2 2
2
2 2 3 21
2
2
b s
n nr rb s
b b
b
a abc a d abc bc a bcd a bc
a ax e v xH a bc a bc a bc
ad aa bc a b cd bdav x bx x x x
a bc a bc a bc a bc a bc
bc a
2 3 22
2
2 22 2 2 2
22
2 2 2
2 4nr
s s b s s
b
b r b r s L
acd a c c a bc bc a cda v v v va bc a bc a bc a bc
b a bcv x v v T
a bc a bc a bc
(5-38)
Para el cálculo de las intensidades, se sustituye (5-21) en (5-4)
f
s s r b s
f
r s r b s
bs si s m v
a a
bm mi m r v
a a
(5-39)
Ahora se sustituye (5-30) y (5-28) en (5-39) quedando
3 2 2
22 2
22 2 22
2
2
s b s
n nr rb s b r b s
b b
r b
a ad a bs s bcd a a bc mc a bc
a ai m x v
a bc a bc
sbd sbcd sb sx v v v
a bc a bc a bca bc
ad a bm m bc
ai r x
a bc
3 2 2
22
22 2 22
2
s
n nr rb s b r b s
b b
ad a a bc rc a bc
av
a bc
mbd mbcd mb mx v v v
a bc a bc a bca bc
(5-40)
Para la simulación, se puede despreciar en (5-40) la influencia del término que
depende de sv ya que la constante que le precede tiene un valor muy bajo respecto al
resto de la ecuación.
Este modelo ha despreciado únicamente las componentes rápidas del flujo del
estátor, con la ventaja que se verá que arroja. A cambio y a primera vista se observa una
mayor complejidad de las ecuaciones.

5 Modelos Reducidos
142
Otra contrapartida que arrojan estas ecuaciones es el manejo de variables de
estado que no tienen un significado físico directo, dándose el caso incluso de que la
variable relacionada con la velocidad del rótor depende de la inercia propia del motor
más la inercia de la carga, lo cual hay que tener en cuenta a la hora de integrar las
ecuaciones en el caso de simular la carga aplicada mediante un embrague, por ejemplo.
Las ecuaciones dependen también de la variación temporal de la constante
compleja de acoplamiento a , o lo que es lo mismo de las variaciones en la frecuencia
de alimentación del estator. Esto provoca que los coeficientes de cada uno de los
términos no sean constantes a menos que la frecuencia así lo sea.
En cambio si la frecuencia de alimentación y la inercia de la carga han de
permanecer constantes, las ecuaciones quedarán bastante más simplificadas, con
coeficientes invariantes en los distintos términos, con lo que este modelo no arrojaría
más complejidad que el modelo de tercer orden clásico, salvo, eso sí, un par de cambios
de variables y que las ecuaciones presentan algún término más.
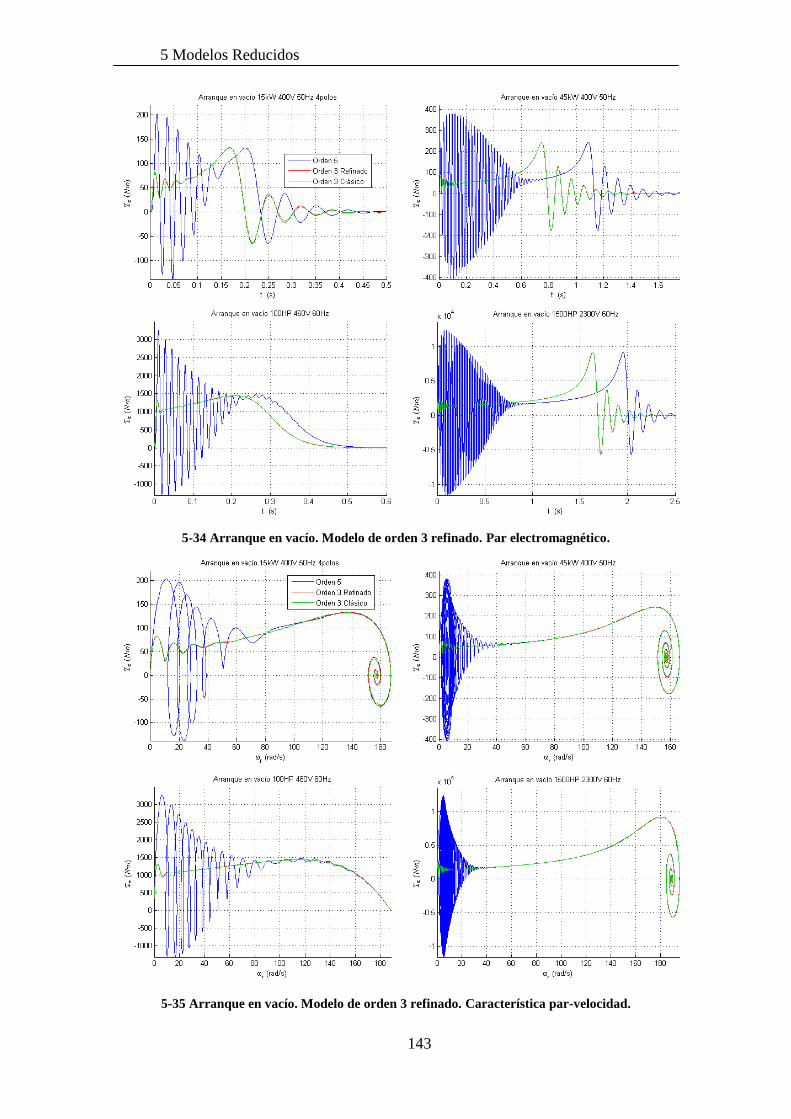
Entrando en materia de lo que es una simulación de arranque en vacío, para las
cuatro máquinas mencionadas en las simulaciones hechas en los modelos anteriores, es
decir las de la Tabla 4-1, se ha procedido a hacer dicha simulación, representada en las
figuras 5-33, 5-34, 5-35 y 5-36 donde se no se aprecia diferencia significativa entre los
modelos de tercer orden clásico y el modelo refinado, salvo por una oscilación muy
levemente mayor alrededor del régimen permanente en vacío del par electromagnético
correspondiente al modelo de tercer orden refinado, así como en consecuencia de la
velocidad del rótor.
5-33 Arranque en vacío. Modelo de orden 3 refinado. Velocidad del rotor.
5 Modelos Reducidos
143
5-34 Arranque en vacío. Modelo de orden 3 refinado. Par electromagnético.
5-35 Arranque en vacío. Modelo de orden 3 refinado. Característica par-velocidad.
5 Modelos Reducidos
144
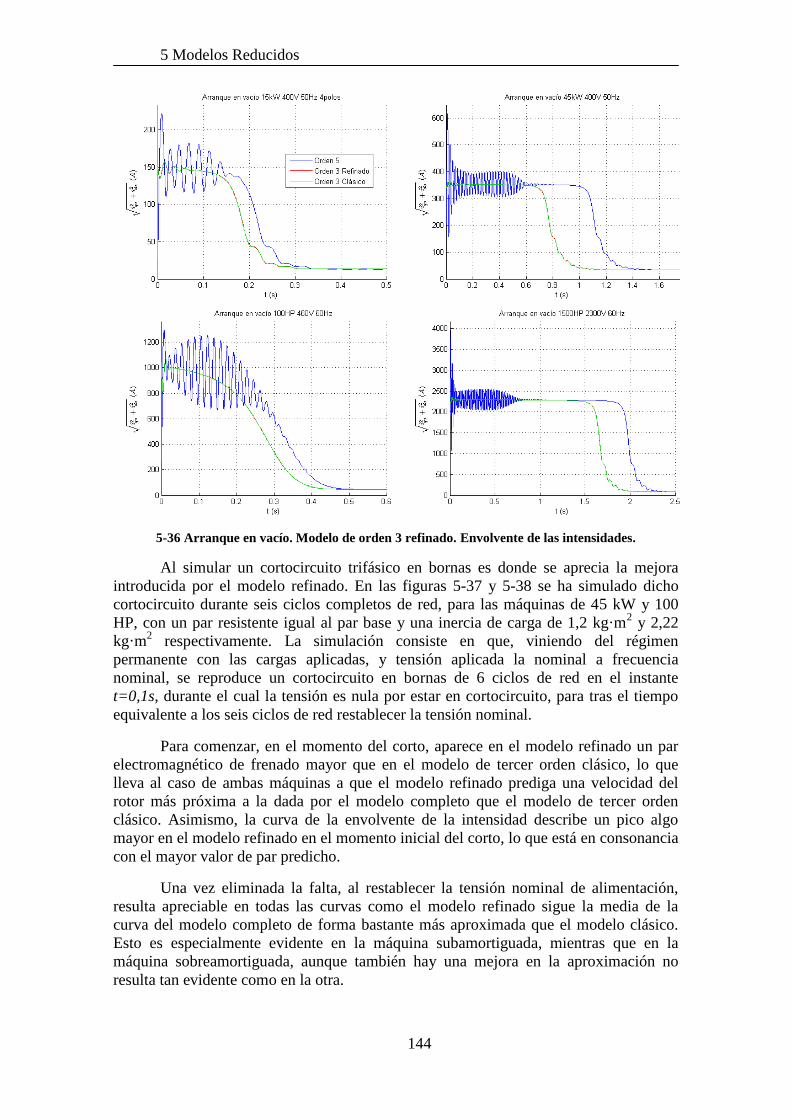
5-36 Arranque en vacío. Modelo de orden 3 refinado. Envolvente de las intensidades.
Al simular un cortocircuito trifásico en bornas es donde se aprecia la mejora
introducida por el modelo refinado. En las figuras 5-37 y 5-38 se ha simulado dicho
cortocircuito durante seis ciclos completos de red, para las máquinas de 45 kW y 100
HP, con un par resistente igual al par base y una inercia de carga de 1,2 kg·m2 y 2,22
kg·m2 respectivamente. La simulación consiste en que, viniendo del régimen
permanente con las cargas aplicadas, y tensión aplicada la nominal a frecuencia
nominal, se reproduce un cortocircuito en bornas de 6 ciclos de red en el instante
t=0,1s, durante el cual la tensión es nula por estar en cortocircuito, para tras el tiempo
equivalente a los seis ciclos de red restablecer la tensión nominal.
Para comenzar, en el momento del corto, aparece en el modelo refinado un par
electromagnético de frenado mayor que en el modelo de tercer orden clásico, lo que
lleva al caso de ambas máquinas a que el modelo refinado prediga una velocidad del
rotor más próxima a la dada por el modelo completo que el modelo de tercer orden
clásico. Asimismo, la curva de la envolvente de la intensidad describe un pico algo
mayor en el modelo refinado en el momento inicial del corto, lo que está en consonancia
con el mayor valor de par predicho.
Una vez eliminada la falta, al restablecer la tensión nominal de alimentación,
resulta apreciable en todas las curvas como el modelo refinado sigue la media de la
curva del modelo completo de forma bastante más aproximada que el modelo clásico.
Esto es especialmente evidente en la máquina subamortiguada, mientras que en la
máquina sobreamortiguada, aunque también hay una mejora en la aproximación no
resulta tan evidente como en la otra.

5 Modelos Reducidos
145
5-37 Corto trifásico. Modelo de orden 3 refinado. Par y velocidad.
5-38 Corto trifásico. Modelo de orden 3 refinado. Envolvente de las intensidades y factor de
potencia.

5 Modelos Reducidos
146
Para poner más énfasis en la mejora que se obtiene mediante este modelo con
respecto al modelo de tercer orden clásico, se ha simulado un aumento de tensión de un
20% sobre la nominal en t=0s, viniendo de régimen permanente y para ambas máquinas
de 45 kW y 100 HP en vacío. De esta forma nos evitamos la duda que ofrece el que, en
la simulación de cortocircuito, al eliminar la falta, el modelo clásico y el modelo
refinado parten de distintos puntos de velocidad del rótor.
En las figuras 5-39 y 5-40, están representadas las simulaciones de aumento
repentino de un 20% de la tensión. Es apreciable a simple vista como el modelo
refinado aporta unas curvas mucho más aproximadas tanto para la velocidad como el
par y el factor de potencia, siguiendo de una forma mucho más precisa el promedio de
las curvas, no siendo tan evidente la mejora en la envolvente de las intensidades, si bien
existe aunque en menor grado.
Hay que hacer notar el detalle de que la velocidad del rótor, en el modelo
refinado, sufre un incremento instantáneo en el mismo momento de aplicar el aumento
de tensión, lo cual es físicamente imposible. Esto es debido a que la velocidad del rótor
ha dejado de ser una variable de estado en el sistema de ecuaciones diferenciales y está
ligado a la nueva variable de estado mediante la ecuación algebraica (5-37). Al no poder
aumentar bruscamente el valor de la variable de estado x y sí hacerlo la tensión
aplicada, necesariamente tendrá que reflejarse este súbito incremento de tensión en la
velocidad del rótor según la ecuación mencionada.
5-39 Aumento 20% tensión. Vacío. Modelo de orden 3 refinado. Par y velocidad.

5 Modelos Reducidos
147
5-40 Aumento 20% tensión. Vacío. Modelo de orden 3 refinado. Envolvente de las intensidades y
factor de potencia.
La inconveniencia de que la inercia de la carga sea parte de las variables de
estado y por tanto que haya que ir actualizando a cada paso de integración la inercia
lleva además aparejado el mismo problema que con los cambios bruscos de tensión.
Nuevamente, en la ecuación (5-37), se aprecia como un cambio brusco de inercia (por
una carga brusca aplicada, por ejemplo) supone que a tensión aplicada constante y, por
no variar de forma brusca la variable de estado x , se refleja directamente en un cambio
brusco de la velocidad del rótor.
Este inconveniente provoca que la predicción ante un cambio brusco de par
resistente, con inercia asociada, no sea tan buena como el resultado del modelo clásico y
tal y como se muestra en las figuras 5-41 y 5-42, en donde se han simulado un
incremento de par resistente desde el vacío hasta el par base, para las dos máquinas de
45 kW y de 100 HP, y con una inercia de la carga de 1,2 kg·m2 y 2,22 kg·m
2
respectivamente, aplicadas a la vez que la carga resistente. Una vez alcanzado el nuevo
régimen permanente se retiran las cargas resistentes, con sus inercias respectivas,
dejándose evolucionar las máquinas hasta retornar nuevamente al punto de régimen
permanente en vacío.
Tal y como se aprecia en las figuras, y pese a no ser tan precisa la predicción, sí
que las curvas tienen cualitativamente las mismas formas, con frecuencias similares al
modelo de tercer orden clásico y manteniendo el carácter subamortiguado o
sobreamortiguado de la evolución de la máquina. En este caso, el cálculo de las
corrientes del estátor, así como el par resistente, tendrán valores mayores de amplitudes
de sobreoscilación durante la evolución hacia la nueva situación de equilibrio.

5 Modelos Reducidos
148
5-41 Aplicación brusca de par (inercia variable). Modelo de orden 3 refinado. Par y velocidad.
5-42 Aplicación brusca de par (inercia variable). Modelo de orden 3 refinado. Envolvente de las
intensidades y factor de potencia.

5 Modelos Reducidos
149
No obstante, en el caso de aplicar una carga de manera brusca pero sin variación
de inercia, los resultados son prácticamente idénticos en los tres casos, es decir, modelo
completo, modelo de tercer orden clásico y modelo de tercer orden refinado. Esto se
aprecia en la figura 5-43, donde se ha representado, par la máquina de 45 kW la
evolución de las curvas de velocidad, par, envolvente de intensidades y factor de
potencia, en la misma simulación que el caso anterior de cambio repentino de par
resistente, salvo que se ha mantenido la inercia de la carga resistente constante en todo
momento y con un valor de 1,2 kg·m2. Como se puede ver, apenas se diferencian unas
curvas de otras.
5-43 Aplicación brusca de par (inercia constante). Modelo de orden 3 refinado.
En un aumento brusco de frecuencia, representado en las figuras 5-44 y 5-45, no
hay aparentemente mucha diferencia entre el modelo refinado y el de tercer orden
clásico, si bien si se amplía la grafica suficientemente se podrá observar que de nuevo el
modelo refinado ajusta mejor al modelo completo, tal y como pasaba en los cambios
bruscos de tensión.
En las figuras y está representada la ampliación de las curvas a los instantes en
los que la frecuencia aumenta súbitamente un 10% pudiendo observarse ese mejor,
aunque levemente, ajuste del modelo refinado, de modo que este sigue mejor la línea
promedio en todas las curvas.
La simulación de aumento brusco de frecuencia vuelve a ser realizada con las
máquinas de 45 kW y de 100 HP, con un par resistente igual a la mitad del par base y
unas inercias de las cargas de 0,6 kg·m2 y 1,11 kg·m
2 respectivamente. Se aplica el
aumento de frecuencia en t=0.1s viniendo de régimen permanente y una vez alcanzado
el nuevo régimen se retorna a la frecuencia nominal.

5 Modelos Reducidos
150
5-44 Cambio brusco de frecuencia. Modelo de orden 3 refinado. Par y velocidad.
5-45 Cambio brusco de frecuencia. Modelo de orden 3 refinado. Envolvente de intensidades y factor
de potencia.

5 Modelos Reducidos
151
5-46 Cambio brusco de frecuencia. Modelo de orden 3 refinado. Par y velocidad. Ampliación.
5-47 Cambio brusco de frecuencia. Modelo de orden 3 refinado. Envolvente de intensidades y factor
de potencia. Ampliación.

5 Modelos Reducidos
152
Como conclusión, se puede decir que el modelo refinado ajusta mejor los
transitorios eléctricos del estátor, con una mayor precisión que el modelo de tercer
orden, sin haber aumentado el orden del sistema de ecuaciones diferenciales.
Como contrapartida, el sistema se complica matemáticamente, con más términos
en las ecuaciones diferenciales. La inercia de la carga afecta directamente a las variables
de estado y hay que realizar dos cambios de variables, de modo que no se puede obtener
la velocidad angular del rótor directamente. Las evoluciones debidas a los cambios de
carga no presentan la misma precisión que el modelo de tercer orden clásico, salvo que
la carga tenga una inercia constante.
5.7. MODELO DE RICHARDS DE TERCER ORDEN
Gill Richards va un paso más allá que en el modelo de tercer orden refinado y
propone separar las variables eléctricas del estator en respuesta libre y respuesta
forzada, para posteriormente separar las componentes lentas de las componentes rápidas
en [8].
Si definimos 0
s como la respuesta forzada del flujo por segundo del estator y l
s como la respuesta libre del flujo por segundo del estator, se tiene el flujo por
segundo como suma de las dos componentes,
0 l
s s s (5-41)
Análogamente, para el rotor se puede hacer la misma separación
0 l
r r r (5-42)
0
s y 0
r se corresponden con la solución algebraica de las ecuaciones (5-1) y
(5-2), dado que son la respuesta de régimen permanente. Así pues, despejando de las
ecuaciones considerando que las derivadas son nulas se calculan las respuestas forzadas
de los flujos por segundo del rótor y del estator, que vendrán dadas por
0
rn
bs b s b r
r rn n
b b
d db
v v
ad bc ad ad bc ad
(5-43)
0
r b s b rr r
n n
b b
c av v
ad bc ad ad bc ad
(5-44)
Sustituyendo (5-43) y (5-44) en (5-41) y (5-42) respectivamente para
posteriormente sustituir en (5-1) y (5-2), se hallan las ecuaciones que relacionan las
respuestas libres de los flujos por segundo con las respuestas forzadas y la dinámica de
la máquina.
0l l l
s s r sa b (5-45)

5 Modelos Reducidos
153
0l l l lrr s r n r r
b
c d d
(5-46)
Las ecuaciones (5-45) y (5-46) pueden ser expresadas en el sistema de referencia
estacionario, sólo hay que realizar la trasformación entre sistemas de referencia,
0sl s sl sl e s
s s r sa b k (5-47)
0sl sl s sl sl e srr s r n r r
b
c d d k
(5-48)
Las constantes sa y
sd son las constantes a y d con la velocidad del sistema de
referencia nula, es decir, sustituyendo la velocidad del sistema de referencia por el valor
nulo, quedando las partes reales de las dos constantes. e sk es la constante compleja de
la trasformación del sistema de referencia síncrono al sistema de referencia estacionario,
y que junto con su derivada respecto al tiempo viene dada por
1( ) ( ) ( ) ( )
( ) ( )
e s s e
s e s e s e s ee s
e s e s
s e e s e e e
k cos jsen k cos jsenk
k sen jcos j k
(5-49)
Derivando la ecuación (5-43) y la ecuación (5-44) se calcula variación en el
tiempo de las respuestas forzadas de los flujos por segundo, que vendrán dadas por
0
2
2 2
rn
bs b s b r
r rn n
b b
r r r rn n n n
b b b b
b s b r
r rn n
b b
d db
v v
ad bc ad ad bc ad
bc d d a d d a d d a d d
v b v
ad bc ad ad bc ad
(5-50)
0
2
2 2
r b s b rr r
n n
b b
r r rn n n
b b b
b s b r
r rn n
b b
c av v
ad bc ad ad bc ad
a d d a d d abc a d d
c v v
ad bc ad ad bc ad
(5-51)
La ecuación mecánica, que todavía no ha sido utilizada, puede ser también
expresada en función de las respuestas libre y forzada de los flujos por segundo,

5 Modelos Reducidos
154
trasformando sl
s y sl
r de vuelta al sistema de referencia síncrono, añadiendo las
respuestas forzadas y sustituyendo en la ecuación (5-3).
0 0 0 01
2
l l s e sl s e slrs r s r s r s r L
b
e k k TH
(5-52)
El tercer y cuarto término de la derecha de la igualdad corresponden a un par
oscilante de media nula, que en caso de que no sea de interés puede ser despreciado, el
primer término será la respuesta forzada del par electromagnético y el segundo termino
la respuesta libre.
Se separan ahora las intensidades del estator también en respuesta forzada más
respuesta libre
0
0
l
s s s
l
r r r
i i i
i i i
(5-53)
donde
0 0 0
0 0 0
s s r
r s r
i s m
i m r
(5-54)
l s e sl sl s e sl
s s r s
l s e sl sl s e sl
r s r r
i k s m k i
i k m r k i
(5-55)
Para reducir el orden de las ecuaciones y evitar esfuerzo de cálculo conviene
ignorar la parte rápida del la respuesta libre del flujo, dado que desaparece mucho antes
de que tenga influencia en la aceleración de la máquina. Para ello Richards propone
hacer un cambio de variables, de forma que una de ellas contenga predominantemente la
respuesta rápida y la otra la respuesta lenta. Se puede considerar entonces que la
variable con la componente rápida alcanza el régimen permanente casi
instantáneamente, convirtiéndose su ecuación en algebraica.
En cualquier caso las variables del rótor y el estátor no son buenas candidatas a
respuesta lenta y respuesta rápida, ya que están muy acopladas entre sí (como se ve por
el orden de magnitud de las constantes b y c) conteniendo ambas además componentes
rápidas y componentes lentas como se ha visto.
Si se separan las respuestas libres de los flujos por segundo referidas al sistema
de referencia estatórico en dos partes correspondientes al flujo por segundo de
dispersión más el flujo por segundo mutuo
sl sl sl
s s smutuo dispersión (5-56)
sl sl sl
r r rmutuo dispersión (5-57)
Se puede concluir, al ser los flujos por segundo mutuos iguales y los flujos por
segundo de dispersión muy inferiores a los primeros, que la diferencia de ambas tendrá
exclusivamente flujos de dispersión y que la suma de ambas tendrá como componente

5 Modelos Reducidos
155
muy predominante el flujo por segundo mutuo. La diferencia está asociada a una
constante de tiempo pequeña, mientras que la suma está asociada a una constante de
tiempo elevada en comparación.
Adoptando esta transformación se pueden definir dos nuevas variables
sl sl
f s r (5-58)
sl sl
g s r (5-59)
o lo que es lo mismo, la transformación inversa queda lo siguiente
2 2
g fsl
s
(5-60)
2 2
g fsl
r
(5-61)
siendo f la variable rápida y
g la variable lenta, asociadas ambas a los flujos por
segundo. Realizando el cambio de variables en la ecuación (5-47) y en la (5-48) y
despejando
0 0
0 0
1 1
2 2
s s s s e s e sr rg n g n f s r
b b
e s e s
g f s r
a b c d d a b c d d k k
f g k k
(5-62)
0 0
0 0
1 1
2 2
s s s s e s e sr rf n f n g s r
b b
e s e s
f g s r
a b c d d a b c d d k k
h n k k
(5-63)
Ahora, las constantes de acoplamiento tienen un valor muy inferior a las
originales b y c, así que se puede eliminar ya de la ecuación diferencial la variación
temporal de la variable rápida asumiendo que f alcanza casi instantáneamente el
régimen permanente. De esta forma, haciendo f nula en la ecuación (5-63) y
despejando
0 01 1e s e s
f g s r
nk k
h h h (5-64)
Sustituyendo a continuación (5-64) en (5-62), tal y como se ha hecho en los
modelos reducidos anteriores
0 0
s s sr rn n s
b e s e sbg g s r
a d d bc c d db a
k kh h h
(5-65)
Operando, la parte del par correspondiente a la respuesta libre queda:

5 Modelos Reducidos
156
2
0 0
2 2
1 1
2
l
f g g f
e s e s
g g s g r
e eT
e nk k
h h h
(5-66)
la ecuación mecánica queda entonces
0 0 0 01 1
2 2
s e sl s e slrs r f g s r s r L
b
e k k TH
(5-67)
Para calcular la respuesta libre de los flujos por segundo del rótor y el estátor, en
función de las variables de estado, se sustituye la ecuación (5-64) en (5-60) y (5-61), de
modo que
0 01 1 11
2
sl e s e s
s g s r
nk k
h h h
(5-68)
0 01 1 11
2
sl e s e s
r g s r
nk k
h h h
(5-69)
De esta forma, para calcular los flujos por segundo de rótor y estátor, se hace la
transformación al sistema de referencia síncrono de las ecuaciones (5-68) y (5-69)
añadiéndoseles las respuestas forzadas, quedando
0 0 0 01 1 11
2
s e sl s e
s s s g s r s
nk k
h h h
(5-70)
0 0 0 01 1 11
2
s e sl s e
r r r g s r r
nk k
h h h
(5-71)
Hasta aquí llega el modelo propuesto por Richards en [8]. Ahora bien, a la hora
de integrar las ecuaciones mediante métodos numéricos, los términos diferenciales de
las respuestas forzadas de los flujos por segundo son un inconveniente y aportan errores
numéricos en dicha integración, que sin ser muy grandes estos, al ir dependiendo un
punto calculado de los cálculos de los puntos anteriores va amplificando el error a
medida que se va realizando la integración, aunque dicho error no sea muy grande.
Para eliminar dicho error de los cálculos numéricos de las variables de estado, en
este trabajo se propone eliminar los términos diferenciales de los flujos por segundo
forzados en la ecuación del flujo por segundo lento (5-65) mediante el siguiente cambio
de variable:
0 0
s rn s
g bk s re s
c d db a
k h h
(5-72)
operando, se obtiene la nueva ecuación de estado
5 Modelos Reducidos
157
0 0
2 2
0 0
s s sr r rn n n s
b b b
k e k s r
s s sr rn n s
b be s r
a d d bc hd c d d hb a
j hh h h
a d d bc c d db a
jh h h
(5-73)
Es fácil comprobar que
1
2
rn
b
h d
(5-74)
y por tanto
0 0
2
0 0
1
2
s s rn s
b rk e k n s r
b
s s sr rn n s
b be s r
a d d bca b
j dh h
a d d bc c d db a
jh h h
(5-75)
De esta forma se ha eliminado con un nuevo cambio de variables los términos
diferenciales de las variables que no son de estado de la ecuación de estado. Sólo
aparecerán los términos diferenciales de las respuestas forzadas en las ecuaciones
algebraicas del cálculo de variables no de estado, como la respuesta rápida de los flujos
por segundo o las corrientes tanto del rótor como del estátor.
La respuesta rápida del flujo en función de la nueva variable de estado por tanto
será, sustituyendo (5-72) en (5-64)
0 0 0 01 1
s rn s
e sbf k s r s r
c d dn n n b a
kh h h h h h h
(5-76)
Los flujos por segundo del rotor y el estátor serán, a partir de (5-70) y (5-71) con
el cambio de variable de (5-72)
0 0 0 0 01
2
s srs k n s r s r s
b
h nh c d d b a
h h
(5-77)
0 0 0 0 01
2
s srr k n s r s r r
b
h nh c d d b a
h h
(5-78)
Las respuestas libres de las intensidades del estator y del rótor, tras reemplazar
(5-72) y (5-76) en (5-55) vendrán dadas por

5 Modelos Reducidos
158
0 0
0 0
1
2
1
2
1
2
1
2
l s e
s g f
s sr rn ns s
b bk s r
s r
l s e
r g f
s rn s
b
i k s m s m
d d b c d da c b a
s mh h h h
s m
h
i k m r m r
d d ba c
m rh h
0 0
0 0
s rn s
bk s r
s r
c d db a
h h
m r
h
(5-79)
Para el cálculo de la intensidad del estátor no hay más que sustituir las
ecuaciones (5-43) y (5-44) en la ecuación (5-54) calculando de este modo la respuesta
forzada de las intensidades, para posteriormente sustituir este resultado junto con (5-79)
en la ecuación (5-53), obteniendo los valores completos de las intensidades, tanto del
rótor como del estátor.
0
0
rn
bs b s b r
r rn n
b b
rn
br b s b r
r rn n
b b
mc sd s dsb ma
i v v
ad bc ad ad bc ad
rc md m dmb ra
i v v
ad bc ad ad bc ad
(5-80)
0 0
0 0
1
2
1
2
s sr rn ns s
b bs k s r
rn
bs r b s b r
r rn n
b b
s rn
br
d d b c d da c b a
i s mh h h h
mc sd s ds m sb ma
v vh
ad bc ad ad bc ad
d d b
i mh
0 0
0 0
s rns s
bk s r
rn
bs r b s b r
r rn n
b b
c d da c b a
rh h h
rc md m dm r mb ra
v vh
ad bc ad ad bc ad
(5-81)
5 Modelos Reducidos
159
De modo que se ha reducido el sistema de ecuaciones diferenciales de quinto
orden a otro tercer orden, con la simplificación que ello conlleva, si bien es cierto que
las ecuaciones ganan algo en complejidad por tener más términos, así como por tener
que calcular términos diferenciales, para los flujos.
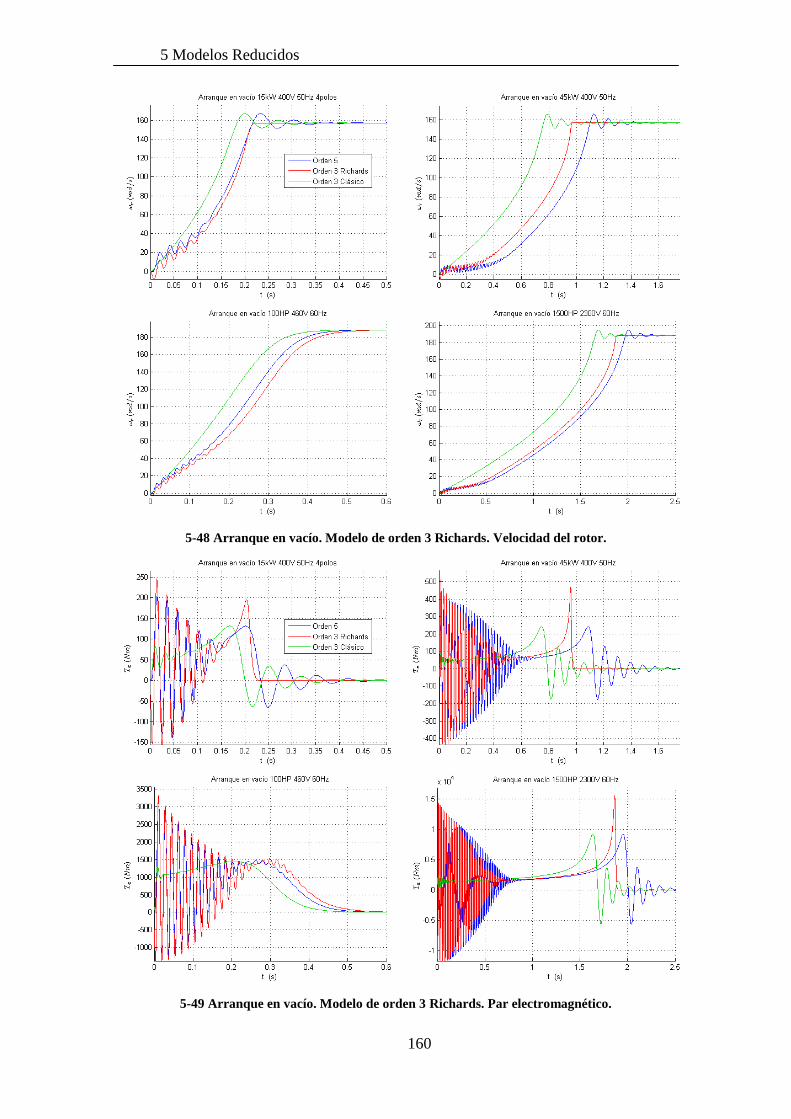
La primera simulación a considerar es la de arranque en vacío, que es además la
simulación para la que el autor ha desarrollado el modelo. En las figuras 5-48, 5-49,
5-50 y 5-51 están representadas las curvas de evolución del arranque en vacío de par,
velocidad, característica y envolvente de intensidades respectivamente, para las
máquinas de la Tabla 4-1.
Simplemente por observación de la evolución de la velocidad del rótor, ya se
aprecia como aparece en este modelo el rizado de la curva en el momento de arranque,
lo cual desaparecía en todos los modelos vistos hasta ahora. Al observar el par
electromagnético, se aprecia como aparece el par oscilante que provoca ese rizado de la
curva de la velocidad en los primeros momentos del arranque. El par electromagnético
oscilante tiene una duración muy similar al modelo completo de quinto orden y unos
valores realmente aproximados en lo que a la amplitud de la oscilación se refiere, si bien
en las máquinas subamortiguadas esta oscilación es mayor en el modelo de Richards
para acabar decayendo a mayor ritmo que en el modelo completo. Para la máquina
sobreamortiguada, el par electromagnético calculado mediante el modelo de Richards
tiene una amplitud en la sobreoscilación siempre superior al modelo completo.
Al inspeccionar las características de par-velocidad para las cuatro máquinas la
similitud en la primera parte del arranque con respecto al modelo de quinto orden se
hace más que evidente. Las curvas de envolvente de intensidades dan unos resultados
parecidos.
No hace falta pues dar más justificaciones ante la evidente mejora que supone el
empleo del modelo de tercer orden de Richards frente a cualquiera de los otros modelos
reducidos explicados hasta ahora, cuando se trata de la primera parte de un arranque en
vacío.
En cambio, el modelo presenta un par de desventajas, que son la desaparición
del carácter oscilatorio de la evolución hacia el punto de régimen permanente en vacío
para las máquinas de carácter subamortiguado y la diferencia de par máximo con
respecto al valor del modelo completo, también para las máquinas subamortiguadas.
Para la máquina sobreamortiguada el ajuste es increíblemente bueno en todas las curvas,
salvo, tal vez, por la predicción de la amplitud de la evolución de la envolvente de las
intensidades, que en cambio tampoco es que diste mucho de los valores reales.
Las intensidades en las máquinas subamortiguadas tienen amplitudes de
oscilación similares al modelo completo pero con duración inferior, además de que en
los primerísimos instantes no alcanzan los valores tan altos debidos a la conexión. Otro
inconveniente es la caída brusca de las intensidades al alcanzar el nuevo equilibrio, que
no ajusta con la realidad, debido a la desaparición de carácter oscilante alrededor del
punto de régimen permanente cuando se hacen los cálculos con este modelo.
5 Modelos Reducidos
160
5-48 Arranque en vacío. Modelo de orden 3 Richards. Velocidad del rotor.
5-49 Arranque en vacío. Modelo de orden 3 Richards. Par electromagnético.

5 Modelos Reducidos
161
5-50 Arranque en vacío. Modelo de orden 3 Richards. Característica par-velocidad.
5-51 Arranque en vacío. Modelo de orden 3 Richards. Envolvente de las intensidades.

5 Modelos Reducidos
162
Para solucionar de alguna forma estos defectos del modelo Richards propone
utilizar este modelo para la primera parte del arranque y una vez desaparecidos los
transitorios del estator, y para unos valores relativamente bajos de deslizamiento,
reemplazar este modelo por el de tercer orden clásico para seguir describiendo la
evolución de la máquina, lo que, como se puede imaginar por lo visto anteriormente,
daría unas curvas realmente próximas al modelo completo de quinto orden, y
únicamente mediante simulación de modelos de tercer orden, bien sea el de Richards,
bien el clásico.
En las figuras 5-52 y 5-53 se representa la evolución de un cortocircuito trifásico
en bornas, de 6 ciclos completos de red de duración, para las máquinas de 45 kW y de
100 HP. Ambas máquinas trabajan contra un par resistente igual al par base y una
inercia de carga de 4kg·m2 y de 8kg·m
2 respectivamente, y se encuentran en un
principio en situación de régimen permanente.
Durante el corto trifásico, el modelo describe el par de frenado inicial con más
exactitud que el modelo de tercer orden clásico, lo que redunda en una mejor
aproximación de la evolución de la velocidad del rótor.
5-52 corto trifásico. Modelo de orden 3 Richards. Par y velocidad.
Hay que destacar que durante el tiempo en que la máquina está en cortocircuito
el modelo de Richards no predice oscilaciones del par electromagnético y las curvas que
se describen son aproximadamente el promedio de las curvas del modelo de quinto
orden. En cambio, al retirar el cortocircuito y volver a aplicar la tensión nominal si
aparecen oscilaciones de las curvas de evolución tanto par, como velocidad del rotor,
envolvente de intensidades y factor de potencia.

5 Modelos Reducidos
163
Las oscilaciones que presenta la máquina de 45 kW subamortiguada son
mayores en el primer momento que en la simulación con el modelo completo,
recuperando además el punto de régimen permanente en menos tiempo. Por tanto, el
modelo aproxima bastante bien el cortocircuito, pero no tan bien la eliminación de la
falta.
En cambio se puede apreciar que para la máquina de 100 HP sobreamortiguada
la similitud de las curvas es muy elevada y mejora con mucho a otros modelos. El único
pero que se puede poner en este caso es que los picos iniciales de las curvas que se
predicen con el modelo de Richards son del orden de un 20% superiores a los del
modelo completo, salvo para el factor de potencia. Una vez superado el pico inicial, las
curvas se asemejan mucho más a las del modelo de referencia.
5-53 Corto trifásico. Modelo de orden 3 Richards. Envolvente de las intensidades y factor de
potencia.
Es de esperar que, al desaparecer la característica subamortiguada en la
evolución de las máquinas durante el arranque, para una aplicación brusca de par
tampoco haya sobreoscilaciones alrededor del punto de régimen permanente hacia el
que evoluciona la máquina.
Efectivamente, en las figuras 5-54 y 5-55, están representadas las curvas de la
evolución de las máquinas de 45 kW y 100 HP para una aplicación repentina de una
carga resistente igual al par base de cada máquina y unas inercias de 1,2 kg·m2 y 2,22
kg·m2 respectivamente. Una vez alcanzado el régimen permanente se retira la carga,
también de manera brusca dejando evolucionar las máquinas al punto de régimen
permanente vacío original. En estas figuras se ve como la máquina subamortiguada no

5 Modelos Reducidos
164
está bien representada por el modelo de orden 3 de Richards, para cambios bruscos de
par, mientras que para la sobreamortiguada se ajustan de forma muy fiel las curvas.
5-54 Aplicación brusca de par. Modelo de orden 3 Richards. Par y velocidad.
5-55 Aplicación brusca de par. Modelo de orden 3 Richards. Envolvente de intensidades y factor de
potencia.
5 Modelos Reducidos
165
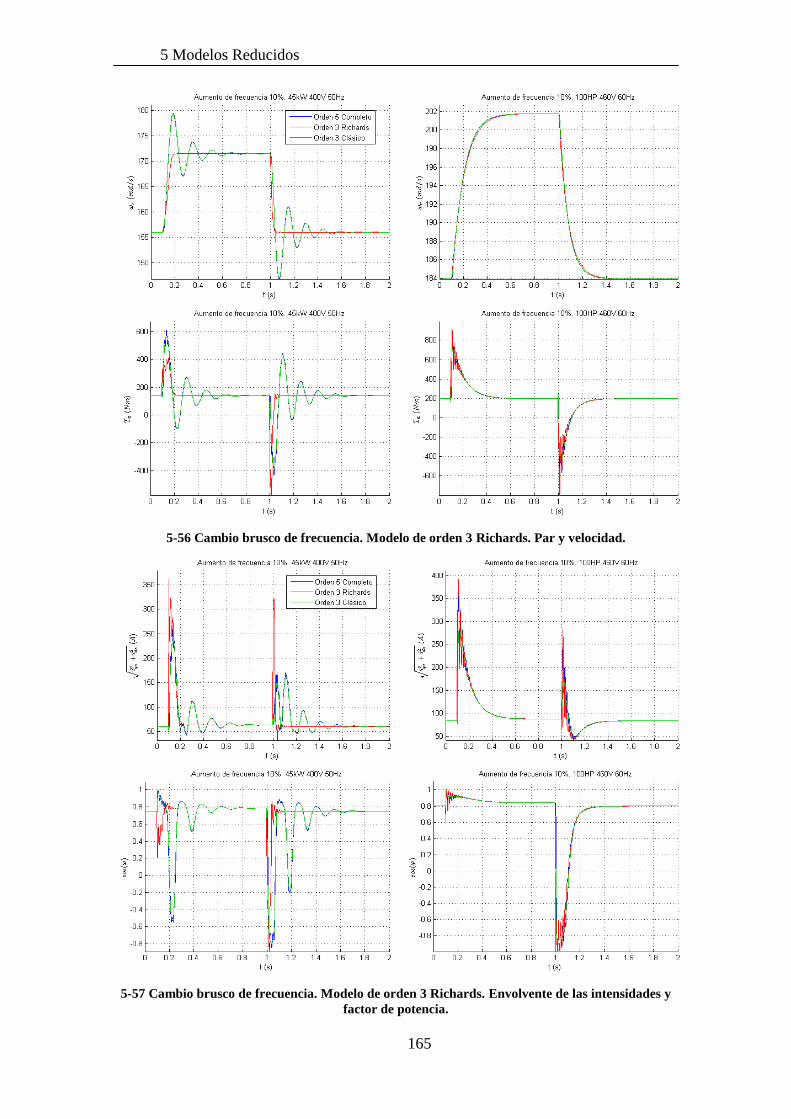
5-56 Cambio brusco de frecuencia. Modelo de orden 3 Richards. Par y velocidad.
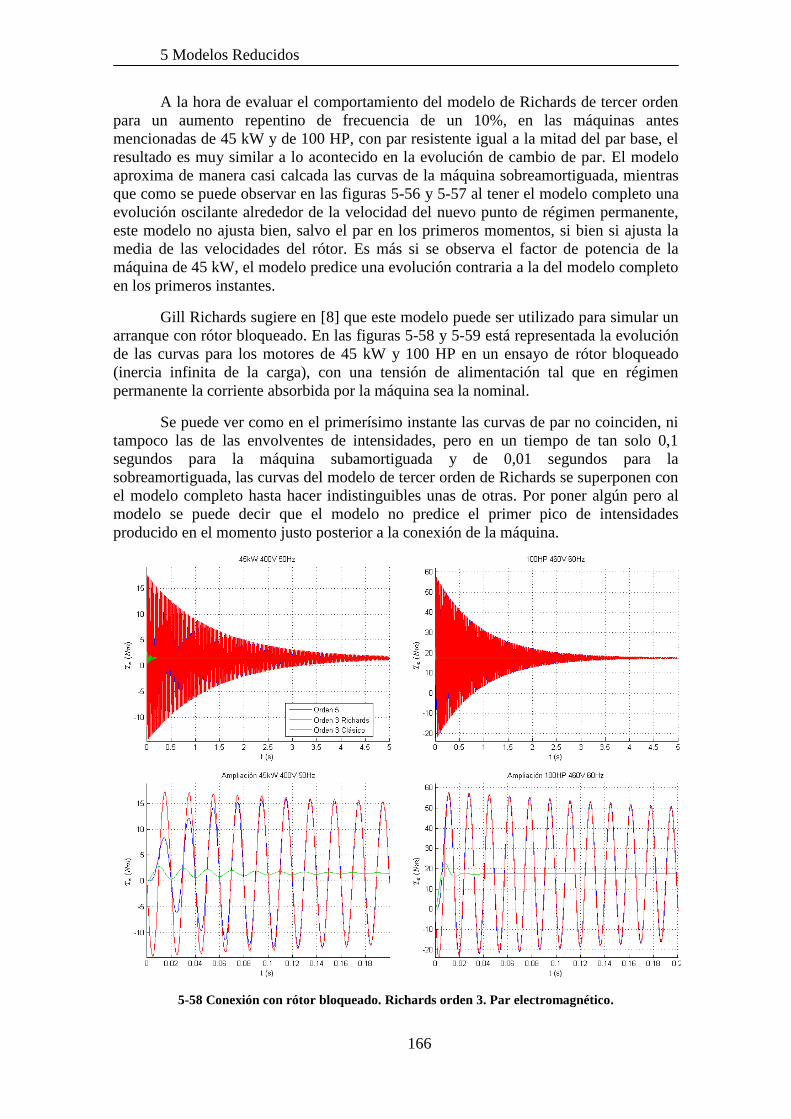
5-57 Cambio brusco de frecuencia. Modelo de orden 3 Richards. Envolvente de las intensidades y
factor de potencia.
5 Modelos Reducidos
166
A la hora de evaluar el comportamiento del modelo de Richards de tercer orden
para un aumento repentino de frecuencia de un 10%, en las máquinas antes
mencionadas de 45 kW y de 100 HP, con par resistente igual a la mitad del par base, el
resultado es muy similar a lo acontecido en la evolución de cambio de par. El modelo
aproxima de manera casi calcada las curvas de la máquina sobreamortiguada, mientras
que como se puede observar en las figuras 5-56 y 5-57 al tener el modelo completo una
evolución oscilante alrededor de la velocidad del nuevo punto de régimen permanente,
este modelo no ajusta bien, salvo el par en los primeros momentos, si bien si ajusta la
media de las velocidades del rótor. Es más si se observa el factor de potencia de la
máquina de 45 kW, el modelo predice una evolución contraria a la del modelo completo
en los primeros instantes.
Gill Richards sugiere en [8] que este modelo puede ser utilizado para simular un
arranque con rótor bloqueado. En las figuras 5-58 y 5-59 está representada la evolución
de las curvas para los motores de 45 kW y 100 HP en un ensayo de rótor bloqueado
(inercia infinita de la carga), con una tensión de alimentación tal que en régimen
permanente la corriente absorbida por la máquina sea la nominal.
Se puede ver como en el primerísimo instante las curvas de par no coinciden, ni
tampoco las de las envolventes de intensidades, pero en un tiempo de tan solo 0,1
segundos para la máquina subamortiguada y de 0,01 segundos para la
sobreamortiguada, las curvas del modelo de tercer orden de Richards se superponen con
el modelo completo hasta hacer indistinguibles unas de otras. Por poner algún pero al
modelo se puede decir que el modelo no predice el primer pico de intensidades
producido en el momento justo posterior a la conexión de la máquina.
5-58 Conexión con rótor bloqueado. Richards orden 3. Par electromagnético.

5 Modelos Reducidos
167
5-59 Conexión con rótor bloqueado. Richards orden 3. Envolvente de intensidades.
Como conclusión, se puede decir que el modelo reducido reproduce de forma
muy adecuada las corrientes y el par del modelo completo durante los transitorios de un
arranque en vacío o de un ensayo de rótor bloqueado.
En cuanto al resto de los casos, nuevamente hay que hacer distinción entre las
máquinas subamortiguadas y sobreamortigadas. El modelo de Richards elimina el
carácter de sobreoscilación en la evolución de las primeras, si bien los valores
aproximan a los promedios del modelo completo con una cierta precisión. Resultaría
interesante en estos casos realizar una alternancia de modelos de tercer orden para las
simulaciones según los tipos de evoluciones que vaya a tener la máquina, como bien
comenta Richards en su artículo.
En lo que ese refiere a máquinas sobreamortiguadas, el ajuste entre el modelo de
tercer orden de Richards y el modelo completo es tan próximo que hace que las curvas
sean casi indistinguibles en muchos de los casos, definiendo completamente las
dinámicas de estas máquinas y haciendo de este modelo el más apropiado de los vistos
hasta ahora con diferencia, si exceptuamos, como es lógico el modelo completo.
5.8. MODELO DE RICHARDS DE SEGUNDO ORDEN
En [8] Gill Richards expone este modelo que deriva de su modelo de tercer
orden explicado en el epígrafe anterior y se basa en que g recibe sus condiciones

5 Modelos Reducidos
168
iniciales, en un arranque a plena tensión, de los impulsos de 0
qds y 0
qdr cuando t=0, de
forma que
0 0
0
0 0 00 0
rs
n s
bg s r
c d db a
h h
(5-82)
Si la fase de sl
s no tiene interés en el estudio a realizar, solo es necesario
simular la amplitud de g . Denominando a esta magnitud h
2
2 2 2
h g g dg qg g (5-83)
entonces
1
2
dg dg qg qg
h g g g g g
h h
(5-84)
Sustituyendo (5-65) en (5-84) e ignorando las funciones de impulso,
1
2
0 0 0
s s s sr rn n
b b
h g g
h
s s rn
b
h
h g g
a d d bc a d d bc
h h
a d d bc
h
(5-85)
La parte del par correspondiente a la respuesta libre resulta de (5-66)
2 0 010
2
e sl
h s r g
en e kT
h h
(5-86)
0g puede ser aproximada asumiendo que h mantiene su orientación
angular inicial, por tanto
0
0
g
g h
h
(5-87)
Este valor se puede usar en (5-64) para hallar f

5 Modelos Reducidos
169
0 00 1
0
g e s
f h s r
h
nk
h h
(5-88)
y junto con (5-79) calcular l
si .
0 0
0 0
01
2 0
01
2 0
s rn s
gl s e bs h s r
h
s rn s
gl s e br h s r
h
d d ba c s m
i k s mh h h
d d ba c m r
i k m rh h h
(5-89)
Sustituyendo ahora en (5-53) junto con (5-54) se pueden calcular las
intensidades del estator.
0 0
0 0
0 0
01 1
2 0
01 1
2 0
s rn s
gs e bs h s r
h
s r
s rn s
gs e br h s r
h
d d ba c
i k s m s mh h h
s m
d d ba c
i k m r m rh h h
0 0
s rm r
(5-90)
Se ha reducido, por tanto, el orden del sistema de ecuaciones diferenciales,
pasando de un orden tres a un orden dos, ya que la ecuación (5-85) que rige el flujo no
tiene valores complejos, al contrario de lo que pasaba con el modelo de tercer orden de
Richards.
De esta forma se puede realizar la simulación de arranque de una máquina en
vacío. Otra vez, se escogen para ello las máquinas de la Tabla 4-1, y la evolución está
representada en las figura 5-60 para la evolución de la velocidad angular, en la figura
5-61 para el par electromagnético, en la 5-62 para la característica par-velocidad y en la
5-63 para la evolución de la envolvente de las intensidades del estator. En todas las
figuras se ha comparado este modelo con el completo (en línea azul) y con el de tercer
orden de Richards (en línea verde).

5 Modelos Reducidos
170
5-60 Arranque en vacío. Modelo de orden 2 Richards. Velocidad del rotor.
5-61 Arranque en vacío. Modelo de orden 2 Richards. Par electromagnético.

5 Modelos Reducidos
171
5-62 Arranque en vacío. Modelo de orden 2 Richards. Característica par-velocidad.
5-63 Arranque en vacío. Modelo de orden 2 Richards. Envolvente de las intensidades.
5 Modelos Reducidos
172
En primer lugar llama la atención el gran parecido entre las curvas del modelo
de tercer orden de Richards y el modelo de segundo orden. Tienen prácticamente el
mismo par máximo, el mismo rizado en todas las curvas al comienzo del arranque, la
misma amplitud de oscilaciones de par, etc. En cambio, se aprecia que el modelo de
segundo orden tiende a predecir un tiempo de arranque algo mayor que el modelo de
tercer orden, aunque dependiendo de la máquina este efecto es más o menos acusado.
En cualquier caso, es evidente la ventaja que supone este modelo para una
simulación de arranque frente al modelo de tercer orden de Richards, ya que predice una
dinámica muy similar y en cambio se ha reducido el orden del sistema de ecuaciones
diferenciales, con la ventaja que eso conlleva.
La desventaja de este modelo reside en la ecuación (5-82), de una forma no del
todo evidente a simple vista. Esta desventaja resulta de tener que calcular en el
momento exacto del cambio de condiciones las magnitudes de los flujos forzados y de
la velocidad angular, para mantener ese valor constante. Esto obliga a que a la hora de
escribir un programa para la simulación sea necesario que este identifique los instantes
en los que se producen dichos cambios, lo que unido a la integración de ecuaciones
puede llegar a introducir más tiempo de cálculo que el propio del modelo de tercer
orden de Richards, anulando de esta manera la ventaja de la reducción de orden.
Lo comentado en el párrafo anterior hace que este modelo sea idóneo para
simulaciones ya preparadas de antemano, y no simulaciones continuas en el que las
entradas puedan variar en cualquier instante de la simulación sin determinar, como por
ejemplo un cortocircuito trifásico con eliminación de la falta ya que habría que calcular
el ángulo de la variable relativa al flujo por segundo para dos instantes distintos.
De esta manera la única simulación que se va a realizar para este modelo, aparte
del arranque en vacío, es la de conexión con rótor bloqueado, igual que se hizo
anteriormente para el modelo de tercer orden de Richards.
Para ello se simulan las máquinas de 45 kW y 100 HP con rotor bloqueado
(velocidad inicial nula e inercia infinita), y con una tensión tal que en el régimen
permanente circule por las máquinas su corriente nominal. La simulación está
representada en las figuras 5-64, 5-65 y 5-66, con una ampliación de la curva para ver
las evoluciones de forma más clara.
Se repite el comportamiento que ha ocurrido con la simulación de arranque en
vacío, e incluso ahora el modelo de Richards de segundo orden se hace indistinguible en
las curvas del modelo de Richards de tercer orden. Siguiendo la misma evolución y con
las mismas conclusiones que se indicaron en el epígrafe 5.7, cuando se explicó el
modelo de Richards de tercer orden.
La ventaja que se aprecia en esta simulación vuelve a residir en que se ha
reducido el orden del modelo de uno de tercer orden a uno de segundo, siendo además
los resultados calcados entre ambos modelos. De esta forma cuando se vaya a hacer una
simulación de conexión con el rótor bloqueado, cuando además interesen los
transitorios del estátor, este será el mejor modelo a elegir si se pretende reducir el orden
del sistema de ecuaciones diferenciales.

5 Modelos Reducidos
173
5-64 Conexión con rótor bloqueado. Richards orden 2. Par electromagnético.
5-65 Conexión con rótor bloqueado. Richards orden 2. Envolvente de intensidades.

5 Modelos Reducidos
174
5-66 Conexión con rótor bloqueado. Richards orden 2. Factor de potencia.
En resumen, este modelo será igual de bueno como el de tercer orden de
Richards, siempre y cuando las simulaciones sean simples, de forma que se pueda
calcular el ángulo inicial de las componentes lentas de los flujos por segundo. Con la
consiguiente ventaja de reducción de orden.
5.9. MODELO DE RICHARDS Y TAN MODIFICADO
N. Derbel, B.A. Kamoun y M. Poloujadoff, proponen en [9] una modificación
del modelo de Richards y Tan de segundo orden comentado en el apartado 5.5. Lo que
se propone es un paso a coordenadas polares a partir del modelo de tercer orden clásico
y considerar el flujo por segundo del rotor como la componente lenta y el ángulo del
mismo como la componente rápida.
Si bien la modificación que proponen los autores no considera que el rotor pueda
estar alimentado, aquí se va a considerar la alimentación del rotor, dado que no
complica demasiado las ecuaciones y generaliza más el modelo. El cambio de variables
es
exp
exp exp
r r
r r r
j
dj j j
dt
(5-91)

5 Modelos Reducidos
175
Por tanto haciendo el cambio en la ecuación (5-6) y dividendo por exp j se
obtiene
exprr r n r b s r
b
d cb cj d d v v j
dt a a
(5-92)
que separando en parte real y parte imaginaria queda de la siguiente forma:
exp
exp
rr n r b s r
b
rr n r b s r
b
d cb cd d v v j
dt a a
cb cd d v v j
a a
(5-93)
Si ahora se considera que 0 en la segunda ecuación de (5-93), o sea que no
tiene peso en dicha ecuación y sustituyendo algunas constantes
2
exp
exp 1
r r b s r
ers r r
b b
d cb cd v v j
dt a a
c cbv v j
a a
(5-94)
Teniendo en cuenta ahora que exp cos senj j se puede poner
2
cos sen
cos sen 1
r r b s r s r
ers r s r r
b b
d cb c cd v v v v
dt a a a
c c cbv v v v
a a a
(5-95)
Para calcular el ángulo expresamos la ecuación (5-95) de la siguiente forma
2sen cos 1 0
sen cos 0
e rr s r s r
b b
c c cbv v v v
a a a
A A B
(5-96)
Esta ecuación se puede resolver con las siguientes relaciones trigonométricas
2 2
tan 1sen cos
1 tan 1 tan
(5-97)
que reemplazando en (5-96) y resolviendo para tan resulta

5 Modelos Reducidos
176
2 22 2 2
2 2
2 2
22
2
2
22
2
2
tan 2 tan 0
tan
1
tan
1
s s s e rr r r r
b b
s e rr r
b b
A B A A A B
A A B A B
A B
cv cv cv cbv v B v
a a a a
cv cbv
a a
(5-98)
La primera ecuación de (5-95) se puede expresar de la siguiente forma
1cos sen
1cos sen
s sr r b r b r
r r
cv cvdda cb v v
dt a a a
dda cb A A
dt a
(5-99)
Ahora, sustituyendo el seno y el coseno por los valores de (5-97), reemplazando
la tangente del ángulo por el valor de (5-98) y simplificando
2 2
22
2
2
1
11
r r b
s e rr r b r r
b b
dda cb A B
dt a
cvd cbda cb v
dt a a a
(5-100)
y la ecuación mecánica queda sustituyendo la primera ecuación de (5-91) en (5-7)
21
exp2
rr b r s L
b
e eb v j T
H a a
(5-101)
que sustituyendo la segunda ecuación de (5-94) y operando y sustituyendo el valor de la
constante a se convierte en
21
exp2
er rb r r r L
b b b
jev j T
H c
(5-102)
Las ecuaciones (5-100) y (5-102) suponen un modelo de segundo orden, se
calcula ahora la componente rápida despejando en la ecuación de (5-98),

5 Modelos Reducidos
177
22
2
2
22
2
2
1
arctan
1
s s s e rr r r r
b b
s e rr r
b b
cv cv cv cbv v B v
a a a a
cv cbv
a a
(5-103)
Con estas componentes se puede calcular el flujo del rotor mediante (5-91)
expr r j (5-104)
y ya se puede calcular el flujo del estator mediante la ecuación (5-5)
1
exps r b s
bj v
a a (5-105)
y las intensidades mediante (5-8).
exp
exp
s r b s
r r b s
sb si m j v
a a
mb mi r j v
a a
(5-106)
Aparentemente el modelo está perfectamente resuelto, aunque surge un
problema, hay situaciones en las que el ángulo no podrá ser calculado, dado que el
término que está dentro de la raíz cuadrada de la ecuación (5-98) puede hacerse
negativo y por tanto no existiría una solución en el dominio real para el ángulo del flujo
del rótor. Esto quiere decir que este modelo, tal cual, solamente es válido con la
siguiente condición.
22
2
21s e r
r r
b b
cv cbv
a a
(5-107)
En cambio, para el caso en el que la primera parte de la desigualdad dada en
(5-107) sea nula, el sistema sí tiene una solución, ya que en este caso concreto la
ecuación (5-92) vendría dada por:
rr r n r
b
d cbj d d
dt a
(5-108)
Ahora separando parte real y parte imaginaria
r r
rn
b
d cbd
dt a
cbd d
a
(5-109)

5 Modelos Reducidos
178
Imponiendo que 0 el resultado que se obtiene es que el ángulo no varía y
por tanto se mantiene en el tiempo y el flujo variará solamente en magnitud según la
primera ecuación de (5-109).
De esta forma la velocidad angular de rotor vendrá dada por la ecuación (5-101)
teniendo en cuenta que mientras dure esta situación cte . Esto permite al menos
poder simular un cortocircuito trifásico en la alimentación para una máquina sin
alimentación rotórica. En cualquier caso, y para evitar problemas de integración en
diversas situaciones lo apropiado será considerar que cte , utilizando las ecuaciones
(5-109) y (5-102) siempre que no se cumpla la condición dada en (5-107).
Este problema que presenta este modelo no es debido a la inclusión de la tensión
del rótor de las ecuaciones, sino que tras el paso a coordenadas polares, se desprecia la
variación del ángulo de la velocidad del rótor por suponer que carece de influencia en la
ecuación.
La realidad es que hay momentos puntuales en que esto no es así y sí que tiene
una influencia considerable en las ecuaciones. De hecho en [9] surge el mismo
problema y aparece una raíz cuadrada en la ecuación de la magnitud del flujo que puede
llegar a dar resultados en el dominio complejo para la magnitud del flujo, cuando la
variable de estado debe pertenecer a la fuerza al dominio real.
La simulación de arranque en vacío, que para este modelo viene representada en
las figuras 5-67, 5-68, 5-69 y 5-70 para la velocidad del rótor, el par electromagnético,
la característica de arranque de par velocidad y la envolvente de las intensidades del
estátor respectivamente. Se ha realizado como en las otras ocasiones para las máquinas
referidas en la Tabla 4-1.
Lo primero que llama la atención en la simulación de arranque en vacío es que el
tiempo en alcanzar el régimen permanente para el modelo de segundo orden modificado
es menor que para el modelo de segundo orden de Richards y Tan, haciendo que la
diferencia con el modelo completo sea incluso mayor, lo cual es una desventaja. Esto se
produce como se puede observar en la figura 5-69 por el hecho de que el par
electromagnético previsto por el modelo modificado sea en todo momento superior al
del modelo de segundo orden de Richards y Tan y porque en los primeros instantes
crece de una forma más rápida, resultando en la previsión de una mayor aceleración de
la máquina.
En cambio, la curva característica del modelo modificado aproxima mejor la del
modelo completo, siendo también más próximo el par máximo al modelo de referencia.
Otra cosa llamativa de la curva característica es que la diferencia entre las curvas de las
máquinas subamortiguadas es mayor, lo que se debe a que para estas máquinas la
evolución prevista por el modelo de segundo orden de Richards y Tan ajusta peor a la
curva característica del modelo completo.
Las corrientes decaen también en menos tiempo en este modelo, como es lógico
al predecir que se alcance antes el régimen permanente. Por lo demás las curvas son
cualitativamente muy similares, teniendo la misma forma, salvo por un leve decremento
en el modelo modificado de la corriente prevista y por un primer pico inferior de la
misma, si bien, al partir del mismo modelo original para el cálculo de las ecuaciones,
alcanzan ambos el mismo valor de intensidad para el régimen permanente.

5 Modelos Reducidos
179
5-67 Arranque en vacío. Modelo de orden 2 Richards & Tan modificado. Velocidad del rotor.
5-68 Arranque en vacío. Modelo de orden 2 Richards & Tan modificado. Par electromagnético.

5 Modelos Reducidos
180
5-69 Arranque en vacío. Modelo de orden 2 Richards & Tan modificado. Característica par-
velocidad.
5-70 Arranque en vacío. Modelo de orden 2 Richards & Tan modificado. Envolvente de
intensidades.

5 Modelos Reducidos
181
5-71 Corto trifásico. Modelo de orden 2 Richards & Tan modificado. Par y velocidad.
5-72 Corto trifásico. Modelo de orden 2 Richards & Tan modificado. Envolvente de intensidades y
factor de potencia.
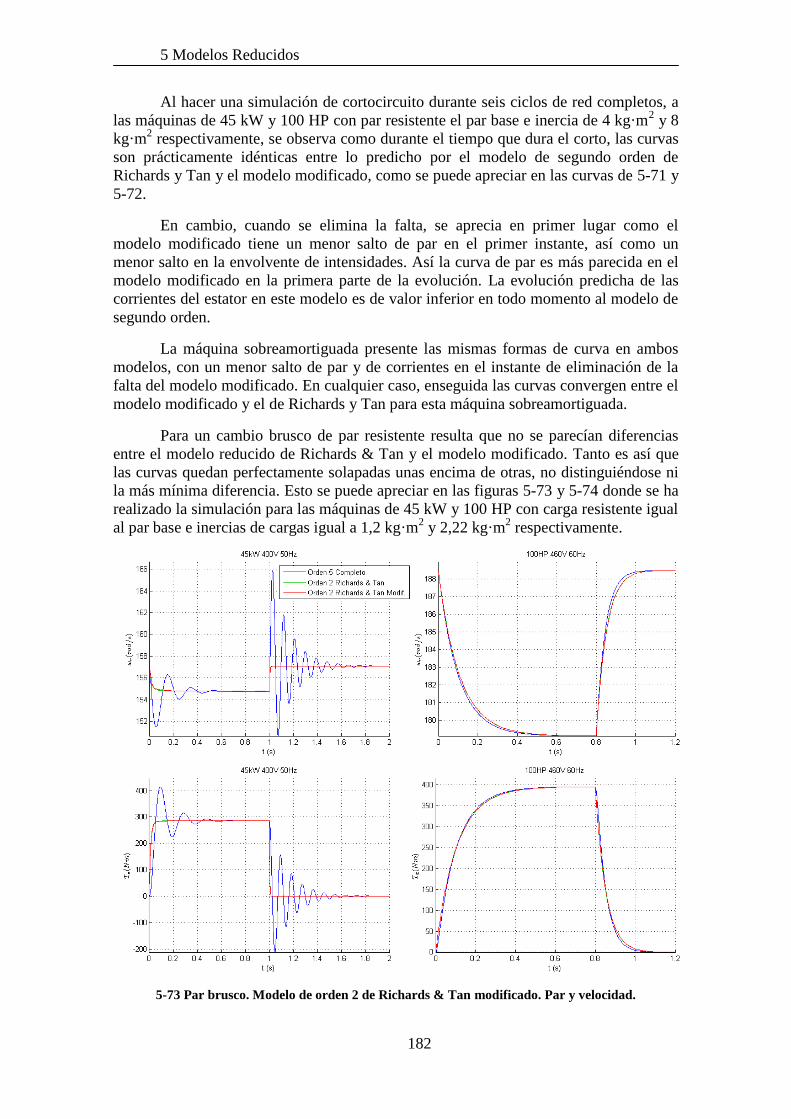
5 Modelos Reducidos
182
Al hacer una simulación de cortocircuito durante seis ciclos de red completos, a
las máquinas de 45 kW y 100 HP con par resistente el par base e inercia de 4 kg·m2 y 8
kg·m2 respectivamente, se observa como durante el tiempo que dura el corto, las curvas
son prácticamente idénticas entre lo predicho por el modelo de segundo orden de
Richards y Tan y el modelo modificado, como se puede apreciar en las curvas de 5-71 y
5-72.
En cambio, cuando se elimina la falta, se aprecia en primer lugar como el
modelo modificado tiene un menor salto de par en el primer instante, así como un
menor salto en la envolvente de intensidades. Así la curva de par es más parecida en el
modelo modificado en la primera parte de la evolución. La evolución predicha de las
corrientes del estator en este modelo es de valor inferior en todo momento al modelo de
segundo orden.
La máquina sobreamortiguada presente las mismas formas de curva en ambos
modelos, con un menor salto de par y de corrientes en el instante de eliminación de la
falta del modelo modificado. En cualquier caso, enseguida las curvas convergen entre el
modelo modificado y el de Richards y Tan para esta máquina sobreamortiguada.
Para un cambio brusco de par resistente resulta que no se parecían diferencias
entre el modelo reducido de Richards & Tan y el modelo modificado. Tanto es así que
las curvas quedan perfectamente solapadas unas encima de otras, no distinguiéndose ni
la más mínima diferencia. Esto se puede apreciar en las figuras 5-73 y 5-74 donde se ha
realizado la simulación para las máquinas de 45 kW y 100 HP con carga resistente igual
al par base e inercias de cargas igual a 1,2 kg·m2 y 2,22 kg·m
2 respectivamente.
5-73 Par brusco. Modelo de orden 2 de Richards & Tan modificado. Par y velocidad.

5 Modelos Reducidos
183
5-74 Par brusco. Modelo de orden 2 de Richards & Tan. Envolvente de intensidades y factor de
potencia.
Evaluando la respuesta en las figuras 5-75 y 5-76 del modelo modificado ante un
aumento repentino de frecuencia de un 10%, con las máquinas de 45 kW y 100 HP
trabajado sobre un par resistente igual a la mitad del par base y con una inercia de la
carga resistente de 0,6 kg·m2 y 1,11 kg·m
2, sólo se aprecia una leve diferencia entre el
modelo en cuestión y el de Richards y Tan. Eso sí, los picos de intensidad en el
momento de cambio de frecuencia del modelo modificado son aproximadamente un
20% mayores, aunque decaen más rápidamente. La similitud es tal que no se podría
decir cuál de las dos curvas ajusta mejor.
En conclusión, este modelo no aporta demasiadas mejoras respecto al modelo de
Richards & Tan expuesto en el epígrafe 5.5. Por un lado predice algo mejor las curvas
características, si bien los tiempos en los que se alcanza el régimen permanente están
más separados de la curva del modelo completo de referencia. Además obliga a
mantener en la programación el valor del paso anterior del ángulo del rótor, para poder
seguir integrando cuando no se cumpla la condición (5-107). Para cambios de par
resistente se ha visto que no hay ninguna diferencia y para cambios de frecuencia y
cortocircuitos no existen diferencias sustanciales.
La gran ventaja que tiene este modelo es que considera máquinas doblemente
alimentadas, al contrario que el de Richards & Tan que sólo considera máquinas con el
rótor cortocircuitado.
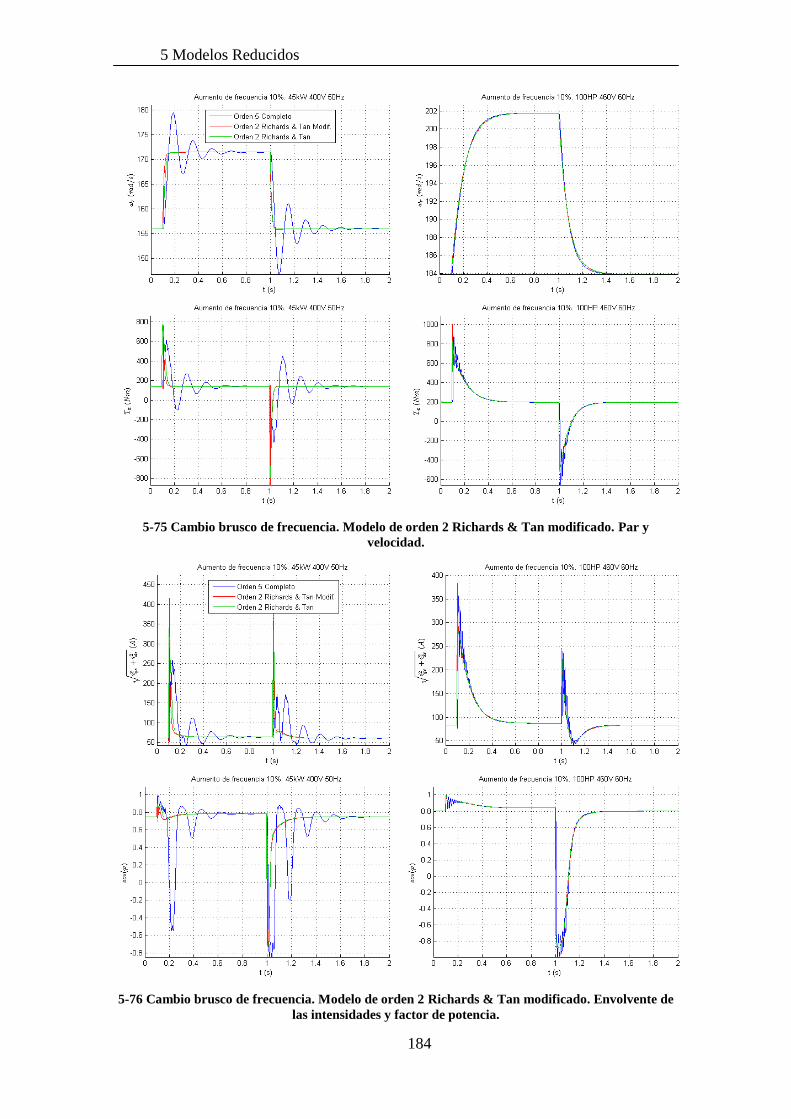
5 Modelos Reducidos
184
5-75 Cambio brusco de frecuencia. Modelo de orden 2 Richards & Tan modificado. Par y
velocidad.
5-76 Cambio brusco de frecuencia. Modelo de orden 2 Richards & Tan modificado. Envolvente de
las intensidades y factor de potencia.

5 Modelos Reducidos
185
5.10. INCLUSIÓN DE SATURACIÓN EN ALGUNOS MODELOS
La inclusión de la saturación en algunos modelos es bastante sencilla. En el
modelo completo esta inclusión es obvia y en los modelos clásicos de tercer orden y de
primer orden solo hay que adaptar las ecuaciones para el cálculo del flujo mutuo y
realizar una pequeña aproximación.
En cambio, en otros modelos la deducción de las ecuaciones con la inclusión de
la saturación acaba conduciendo a la necesidad de resolver sistemas de ecuaciones no
lineales por métodos numéricos en cada paso de la integración. De esta forma que lo
que se gana computacionalmente por un lado al reducir el orden del sistema de
ecuaciones diferenciales se pierde por otro al tener que realizar cálculos numéricos
intensivos en cada paso de la integración.
Es por esto que sólo se incluirá en este apartado los modelos de quinto orden
completo, de tercer orden clásico y de primer orden clásico.
5.10.1. MODELO DE QUINTO ORDEN
La saturación del núcleo magnético no introduce desequilibrios, por tanto, si se
alimenta la máquina de forma equilibrada también desaparecerán las componentes 0 del
rótor y el estátor. Es posible introducir la saturación en el modelo de quinto orden, sin
más que introducir la ecuación (4-101) y (4-102) escritas en forma compleja en las
ecuaciones anteriores (5-1)-(5-3). De esta forma (4-101) y (4-102) se puede escribir en
una sola ecuación en forma compleja como
s rm a
ls lr
XX X
(5-110)
donde
m md mqj (5-111)
Despejando r de la ecuación (5-110) para sustituir en (5-1) se obtiene la
variación del flujo por segundo del estátor considerado este lineal.
1 1
lr lr
s s e es b
r m s
a ls
m s mb b b s b b s
l ss s s b
s
l b
r rj v j v
X
X X
X X
X
(5-112)
Análogamente para la ecuación (5-2), despejando s de la ecuación (5-110) y
sustituyendo se calcula la variación del flujo por segundo del rótor considerando que es
lineal

5 Modelos Reducidos
186
1 1
ls lss m r
a lr
m r
lr
b r er rr b b b r b r
lr b b
e rb b r
b b
r
r r
m
X X
X X
X
rrj j v
X
j v
(5-113)
El par electromagnético se calcula sustituyendo el valor aquí deducidos de r en
la parte correspondiente al par de la ecuación (5-3), de esta forma
lr lr lrm s m s
a ls a ls
lr lr ls lsm s m r
a ls a l
lre s s s
s s r
r
r
T e eX X X X
X X X X
X X X X
X X X X
e
e e e e
(5-114)
Como el segundo término de la parte derecha de la ecuación (5-114) no tiene
parte real, por ser e imaginario puro junto con que el producto de un valor por su
conjugada resulte real y que el resto de factores sean reales, se puede eliminar de la
ecuación y al final queda
1 1
2 2e s m
ls lr
m rT j jX X
(5-115)
Con lo que la ecuación (5-3) queda de la siguiente forma
1 1
2 2
rr L
b lr
mj TH X
(5-116)
Ahora el flujo saturado se puede calcular igual que en el epígrafe 4.9. De esta
manera convirtiendo a variables complejas las ecuaciones (4-115)-(4-116) y
considerando la variable de disminución de saturación como m que sigue la misma
gráfica dada por la figura 4-71.
mm m
m
mq md mqj
(5-117)
Entonces el nuevo flujo mutuo por segundo saturado, de la ecuación (4-117) y
(4-118) será
r
l
sat s am a m
ls Mr
XX
X X X
(5-118)
que es el que se debe utilizar en lugar de m en las ecuaciones dadas por (5-112),
(5-113) y (5-116) cuando se quiere incluir la saturación.
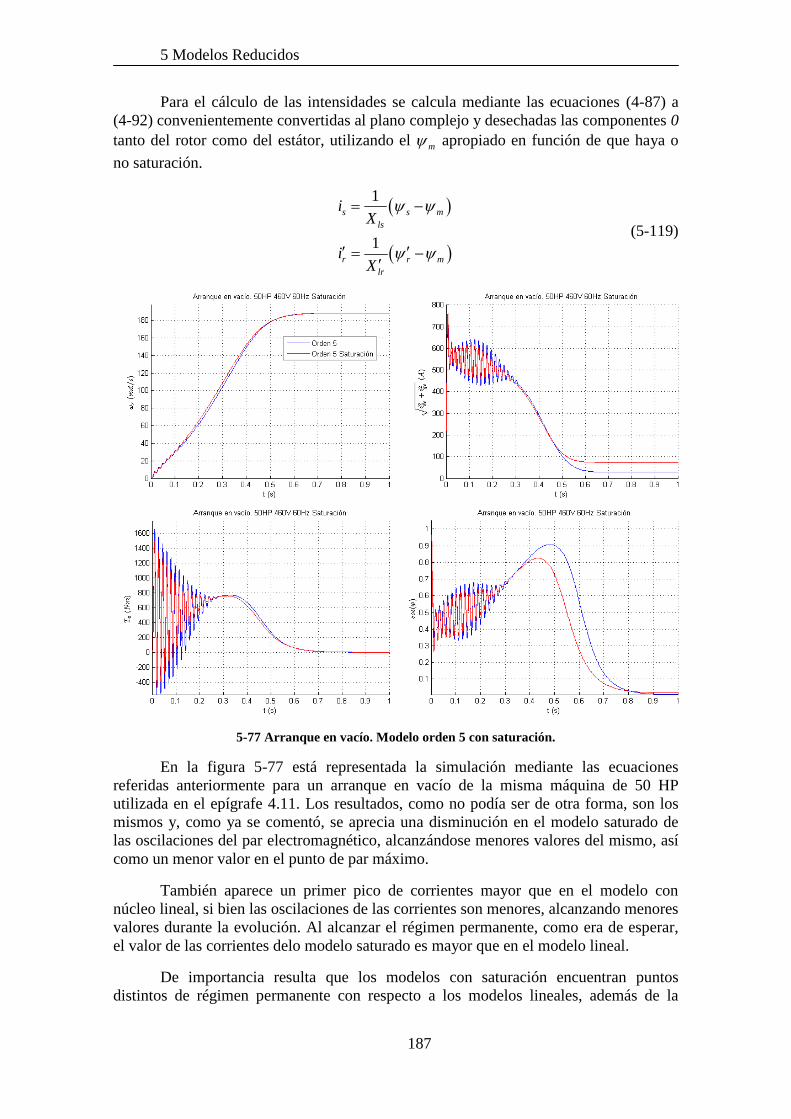
5 Modelos Reducidos
187
Para el cálculo de las intensidades se calcula mediante las ecuaciones (4-87) a
(4-92) convenientemente convertidas al plano complejo y desechadas las componentes 0
tanto del rotor como del estátor, utilizando el m apropiado en función de que haya o
no saturación.
1
1
s s m
ls
r r m
lr
iX
iX
(5-119)
5-77 Arranque en vacío. Modelo orden 5 con saturación.
En la figura 5-77 está representada la simulación mediante las ecuaciones
referidas anteriormente para un arranque en vacío de la misma máquina de 50 HP
utilizada en el epígrafe 4.11. Los resultados, como no podía ser de otra forma, son los
mismos y, como ya se comentó, se aprecia una disminución en el modelo saturado de
las oscilaciones del par electromagnético, alcanzándose menores valores del mismo, así
como un menor valor en el punto de par máximo.
También aparece un primer pico de corrientes mayor que en el modelo con
núcleo lineal, si bien las oscilaciones de las corrientes son menores, alcanzando menores
valores durante la evolución. Al alcanzar el régimen permanente, como era de esperar,
el valor de las corrientes delo modelo saturado es mayor que en el modelo lineal.
De importancia resulta que los modelos con saturación encuentran puntos
distintos de régimen permanente con respecto a los modelos lineales, además de la

5 Modelos Reducidos
188
distinta evolución, y es por esto que se ha considerado de interés incluir la saturación de
una forma sencilla en modelos reducidos.
5.10.2. MODELO DE TERCER ORDEN CLÁSICO
Se puede formular las ecuaciones para considerar la saturación a partir de la
ecuación (5-112) , considerando saturación, despreciando el término diferencial y
despejando para s
1
1 1
sat b sm s
e eb s b s
b b
s v
j j
(5-120)
Para calcular sat
m se debe conocer el valor de m , y para conocer este último
hace falta conocer s que, según la ecuación anterior, depende de sat
m . El problema
está condenado a utilizar un método numérico en cada paso de integración.
En cambio, si se aproxima el flujo mutuo saturado por el flujo mutuo lineal en la
ecuación (5-120), solamente para el cálculo del flujo lineal, se podrá tener un valor
aproximado de este último. Con esta consideración en mente, se sustituye ahora en
(5-110) y despejando
1 1
1 1
sat b sm s
e eb s b s
b
a rm a
ls ls l
b
r
XX
jX X
jX
v
(5-121)
Se considera ahora el valor de sat
m igual a m y despejando
1
1 1
a
ls a
eb s
b b ss
e eb s b s
m r
lr
ls a l
b
a
b
s
XX X
XX X
v
jX X
j
j
(5-122)
Este es el valor del flujo mutuo lineal aproximado al que se le puede aplicar la
saturación. El valor saturado calculado se sustituye en las ecuación (5-113) y (5-115)
formando un sistema de tercer orden.
La intensidad del rótor vendrá dada por la segunda ecuación de (5-119) y la del
estátor sustituyendo la ecuación (5-120) en la primera ecuación de (5-119), de manera
que
1
1 1
b s s es
e eb s b s
b b
sat
s m
ls
v j
j j
iX
(5-123)
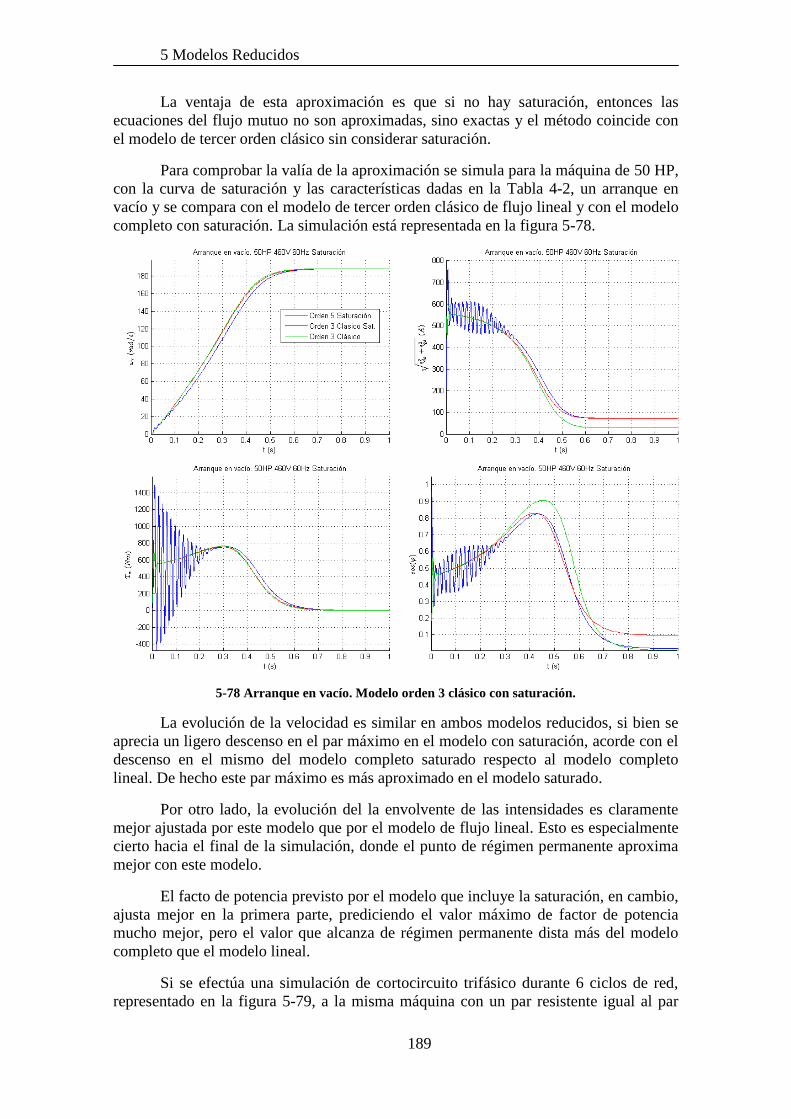
5 Modelos Reducidos
189
La ventaja de esta aproximación es que si no hay saturación, entonces las
ecuaciones del flujo mutuo no son aproximadas, sino exactas y el método coincide con
el modelo de tercer orden clásico sin considerar saturación.
Para comprobar la valía de la aproximación se simula para la máquina de 50 HP,
con la curva de saturación y las características dadas en la Tabla 4-2, un arranque en
vacío y se compara con el modelo de tercer orden clásico de flujo lineal y con el modelo
completo con saturación. La simulación está representada en la figura 5-78.
5-78 Arranque en vacío. Modelo orden 3 clásico con saturación.
La evolución de la velocidad es similar en ambos modelos reducidos, si bien se
aprecia un ligero descenso en el par máximo en el modelo con saturación, acorde con el
descenso en el mismo del modelo completo saturado respecto al modelo completo
lineal. De hecho este par máximo es más aproximado en el modelo saturado.
Por otro lado, la evolución del la envolvente de las intensidades es claramente
mejor ajustada por este modelo que por el modelo de flujo lineal. Esto es especialmente
cierto hacia el final de la simulación, donde el punto de régimen permanente aproxima
mejor con este modelo.
El facto de potencia previsto por el modelo que incluye la saturación, en cambio,
ajusta mejor en la primera parte, prediciendo el valor máximo de factor de potencia
mucho mejor, pero el valor que alcanza de régimen permanente dista más del modelo
completo que el modelo lineal.
Si se efectúa una simulación de cortocircuito trifásico durante 6 ciclos de red,
representado en la figura 5-79, a la misma máquina con un par resistente igual al par
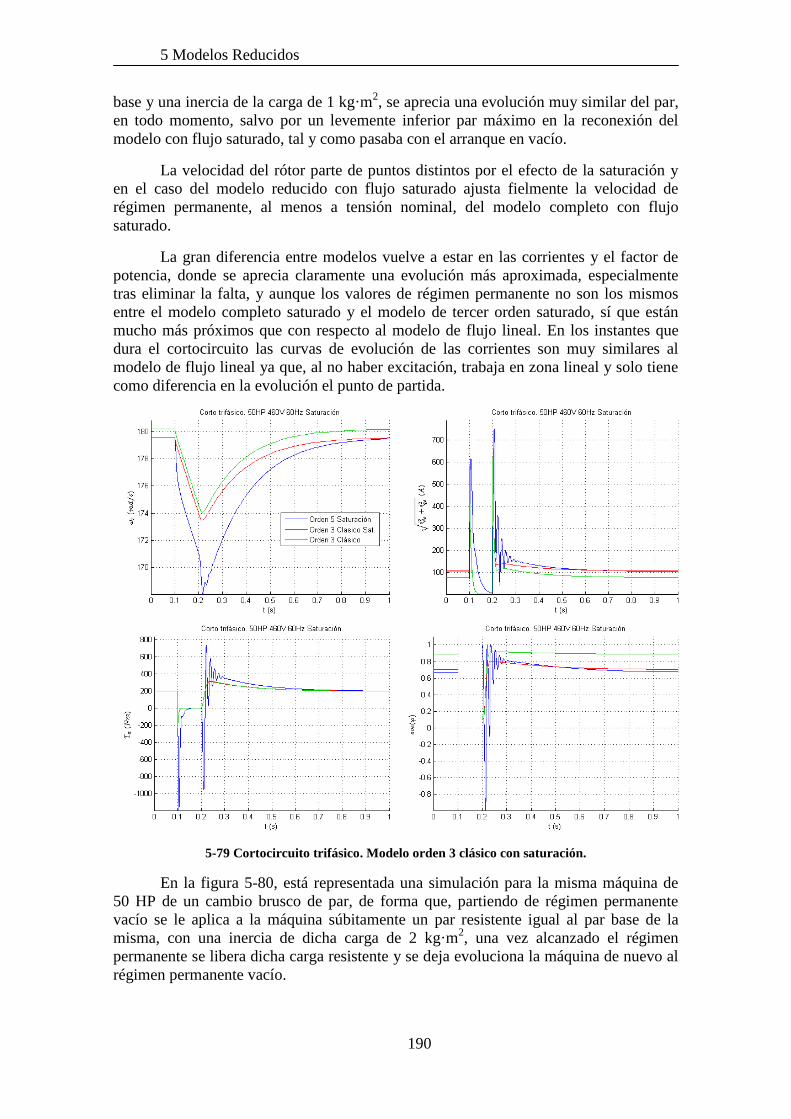
5 Modelos Reducidos
190
base y una inercia de la carga de 1 kg·m2, se aprecia una evolución muy similar del par,
en todo momento, salvo por un levemente inferior par máximo en la reconexión del
modelo con flujo saturado, tal y como pasaba con el arranque en vacío.
La velocidad del rótor parte de puntos distintos por el efecto de la saturación y
en el caso del modelo reducido con flujo saturado ajusta fielmente la velocidad de
régimen permanente, al menos a tensión nominal, del modelo completo con flujo
saturado.
La gran diferencia entre modelos vuelve a estar en las corrientes y el factor de
potencia, donde se aprecia claramente una evolución más aproximada, especialmente
tras eliminar la falta, y aunque los valores de régimen permanente no son los mismos
entre el modelo completo saturado y el modelo de tercer orden saturado, sí que están
mucho más próximos que con respecto al modelo de flujo lineal. En los instantes que
dura el cortocircuito las curvas de evolución de las corrientes son muy similares al
modelo de flujo lineal ya que, al no haber excitación, trabaja en zona lineal y solo tiene
como diferencia en la evolución el punto de partida.
5-79 Cortocircuito trifásico. Modelo orden 3 clásico con saturación.
En la figura 5-80, está representada una simulación para la misma máquina de
50 HP de un cambio brusco de par, de forma que, partiendo de régimen permanente
vacío se le aplica a la máquina súbitamente un par resistente igual al par base de la
misma, con una inercia de dicha carga de 2 kg·m2, una vez alcanzado el régimen
permanente se libera dicha carga resistente y se deja evoluciona la máquina de nuevo al
régimen permanente vacío.

5 Modelos Reducidos
191
Es apreciable como para la evolución de cambio de par el modelo de tercer
orden con saturación aproxima mejor a los resultados del modelo completo con
saturación. En concreto, la curva de par y velocidad entre los modelos nombrados es tan
similar, que se hace prácticamente indistinguible uno de otro en la gráfica, mientras que
el modelo de tercer orden sin saturación evoluciona hacia otro punto distinto tras aplicar
el par resistente.
En las curvas de la envolvente de intensidades y factor de potencia hay una leve
diferencia entre el punto hacia el que evoluciona el modelo completo con saturación y el
modelo de tercer orden con saturación. En cualquier caso es más próxima la curva que
el modelo de tercer orden de flujo lineal. Para las intensidades, también el punto de
régimen permanente es más próximo en el modelo con flujo saturado.
En cambio, se puede observar como el factor de potencia de la curva del modelo
de tercer orden con saturación dista más del modelo de referencia al tratarse del régimen
permanente en vacío. Se puede comprobar que este efecto es debido a que el modelo
con saturación prevé una mayor componente de potencia activa, siendo la potencia
reactiva muy similar. Este efecto es producto del funcionamiento en vacío, debido a que
hay muy poco consumo y una pequeña diferencia tiene un gran efecto en el factor de
potencia. En cuanto hay una pequeña carga resistente, los modelos saturados predicen
factores de potencia más parecidos.
5-80 Cambio brusco de par resistente. Modelo orden 3 clásico con saturación.
En cualquier caso, el que las curvas de intensidad y factor de potencia, en el
modelo de tercer orden saturado, no converjan al mismo punto en el modelo completo
con saturación se debe a que se ha hecho una estimación aproximada del flujo lineal, al
que posteriormente se le aplica la saturación, introduciendo un error que será mayor

5 Modelos Reducidos
192
cuanto más saturado esté el flujo, si bien siempre será más próximo que el modelo con
el flujo lineal.
Cuando se somete a la máquina a un cambio repentino de frecuencia las
consideraciones son muy similares a las de la simulación de cambio de par. En este
caso, representado en la figura 5-81, se aplica a la máquina de 50 HP con un par
resistente igual a la mitad del par base y con una inercia de la carga resistente de 1kg·m2
un aumento repentino de la frecuencia de un 10%, para posteriormente, y tras superar el
transitorio, volver a la situación inicial, dejando evolucionar la máquina hasta que se
estabilice.
Tal y como ocurría con el cambio de par, las curvas de velocidad y par
electromagnético son muy similares entre el modelo de tercer orden con saturación y el
modelo de orden completo con saturación. La curva de par en este caso es muy similar
también en el modelo con flujo lineal, aunque la evolución de la velocidad del rótor se
aprecia como parte de distintos puntos de régimen permanente y evoluciona a distintos
puntos de régimen permanente.
En este caso la similitud es también muy alta en la envolvente de intensidades y
el factor de potencia, distando mucho de la predicción del modelo de tercer orden lineal,
partiendo de valores parecidos y evolucionando de forma similar, de no ser por el rizado
originado por los transitorios del estator del modelo completo.
5-81 Cambio brusco de frecuencia. Modelo orden 3 clásico con saturación.
En resumen, cuando hay saturación el modelo aquí presentado predice
evoluciones de las curvas mucho más próximas que el modelo lineal, especialmente
para las variables eléctricas, si bien los valores de régimen permanente no coinciden

5 Modelos Reducidos
193
entre los modelos saturados, al contrario de lo que pasa cuando se comparan los mismos
modelos pero de flujo lineal.
Como se comento anteriormente esto es debido a la aproximación hecha al
calcular las ecuaciones del modelo, provocando esta aproximación que los modelos
saturados disten más entre sí cuanta más saturación haya. Aún así, se obtiene un
resultado más próximo al de referencia y con la ventaja de que en caso de ausencia de
saturación en la máquina a considerar el modelo coincide con el modelo de tercer orden
clásico.
5.10.3. MODELO DE PRIMER ORDEN CLÁSICO
Para hacer extensivo lo visto en el epígrafe anterior, si se quiere incluir la
saturación en el modelo de primer orden clásico no hay más que partir de las ecuaciones
para saturación del modelo de tercer orden clásico. Así, despreciando las variaciones del
flujo del rótor en la ecuación (5-113), considerando saturación y despejado r
1
1 1
sat b rm r
e er rb r b r
b b b
r
b
v
j j
(5-124)
Ahora, sustituyendo en (5-121) y despejando m
1 1
1 1
1 1
1 1
a am
ls lr
a
ls
sat sat
m me e r
b s b rb b b
b s b rs r
e e rb
lrs b r
b b b
j j
v v
j
X X
X X
XX
jX
(5-125)
Realizando la misma aproximación que en el modelo anterior de que sat
m m
2
1 11 1
1 1 1 1 1
ls
m
a
e erb r b s s b s
l
b r r
b b lr b
b r s e e e
s
er rb s r
M b b b M b M lr b b
X X
X X X X
j v j
X
v
Xj
(5-126)
De esta forma se tiene la aproximación del flujo mutuo por segundo lineal del
motor en función de las tensiones de alimentación. Se reduce el flujo por segundo
mutuo según se ha indicado anteriormente para calcular el valor saturado y se introduce
en la ecuación (5-127), que viene de sustituir r de la ecuación (5-124) en la ecuación
(5-115) y realizar algunas sustituciones de las constantes de acoplamiento para
simplificar la forma de la misma.

5 Modelos Reducidos
194
2
2
2 2
1 1
2 211
e rb r
b b sat satb re m m r
lr lr e re rb rb r
b bb b
T j vX X
j
(5-127)
Para el cálculo del flujo del rótor se utiliza la ecuación (5-124) y para el estátor
la ecuación (5-120). Para la intensidad del estátor se utiliza la ecuación (5-123) y para
calcular la intensidad del rótor se sustituye (5-124) en la segunda ecuación de (5-119)
1
1 1
e rb r
b b b rr r
e er rb r b r
b b b b
m
lr
i j vX
j j
(5-128)
La figura 5-82 contiene las gráficas de la simulación del modelo de primer orden
clásico con saturación para un arranque en vacío de la máquina de 50 HP descrita en la
Tabla 4-2. Este modelo se compara con el modelo completo en presencia de saturación
y con el modelo de primer orden clásico con flujo lineal.
5-82 Arranque en vacío. Modelo orden 1 clásico con saturación.
Se puede apreciar como las curvas de velocidad y de par son similares entre los
modelos de primer orden, ambos con adelanto en el tiempo de arranque con respecto al
modelo completo. Tiene una leve diferencia, que consiste en que el par máximo del

5 Modelos Reducidos
195
modelo de primer orden con saturación es ligeramente inferior al modelo de primer
orden de flujo lineal. Este descenso, que es debido a la saturación, se aprecia también al
comparar el modelo completo lineal y el modelo completo saturado.
En la curva de intensidad, hay mayor diferencia entre el modelo lineal y el
modelo con saturación, más acusada en la segunda parte de la curva, cuando se
aproxima al régimen permanente. En este caso el valor de régimen no es tan
aproximado como ocurría con el modelo de tercer orden con saturación, pero aún así es
apreciable la mejora de introducir saturación en el modelo de primer orden.
El factor de potencia del modelo de primer orden con saturación tiene una
primera parte más aproximada a la curva, mientras ocurren los transitorios del estator y
la máquina se está acelerando. En cambio cuando se aproxima a valores de
deslizamiento nulo de la máquina el valor del factor de potencia dista mucho del real, lo
que se debe a la mayor potencia activa prevista por el modelo, tal y como sucedía en el
modelo de tercer orden clásico con saturación
Al examinar la figura 5-83, en la que se describe un corto trifásico de seis ciclos
de red de la máquina de 50 HP trabajando con un par resistente igual al par base y una
inercia de 1kg·m2, es evidente la similitud de par entre los dos modelos de primer orden
y la diferencia en la curva de velocidad estriba, básicamente, en que parten de distintas
velocidades de régimen permanente los dos modelos.
Algo parecido pasa con las curvas de intensidad y de factor de potencia, la
tendencia a distintos puntos de régimen permanente marca las curvas, ya que en forma
son muy similares. De cualquier manera, es apreciable la mayor proximidad del modelo
reducido con saturación frente al modelo lineal.
5-83 Cortocircuito trifásico. Modelo orden 1 clásico con saturación.

5 Modelos Reducidos
196
En la simulación de aplicación de par resistente de forma repentina para la
máquina de 50 HP, mostrada en la figura 5-84, la curva de par es prácticamente idéntica
entre los tres modelos, si bien, aunque levemente, es más próxima al modelo de
referencia el modelos reducido con saturación aquí tratado. El efecto es, por tanto, que
en la evolución hacia al nuevo punto de régimen permanente a plena carga el modelo
con saturación aproxima más la velocidad final del modelo de referencia, si bien
presenta una diferencia apreciable con respecto a este último.
Las intensidades del modelo reducido con saturación son claramente más
próximas al modelo saturado, aunque se queda la previsión a medio camino entre el
modelo de referencia y el modelo de flujo lineal.
En cuanto al factor de potencia, a nada que haya algo de carga resistente, es el
modelo de primer orden de flujo saturado el que lo predice mejor. Al contrario, cuando
la máquina trabaja en condiciones próximas al vacío, el modelo de flujo saturado
presenta una mayor diferencia, por las razones explicadas en la simulación de arranque
en vacío.
5-84 Cambio brusco de par resistente. Modelo orden 1 clásico con saturación.
La última simulación realizada es la de aumento brusco de frecuencia en un
10%, nuevamente con la máquina de 50 HP y con un par de carga resistente igual a la
mitad del par base, con inercia de la carga de 1 kg·m2.
Esta simulación, representada en la figura 5-85 muestra nuevamente el mejor
ajuste del modelo clásico de primer orden con saturación al modelo de referencia en
todas las curvas, aunque en las de par y velocidad la diferencia no sea tan apreciable
como en las de envolvente de intensidades y factor de potencia. Las curvas tienen
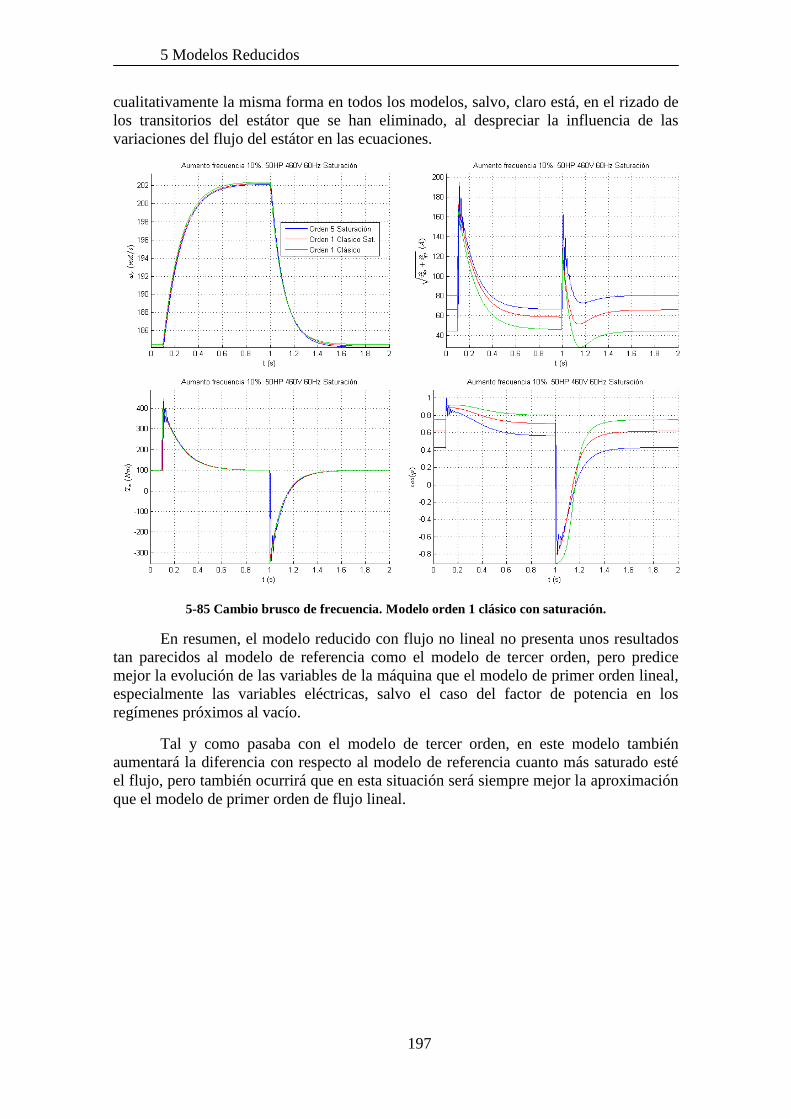
5 Modelos Reducidos
197
cualitativamente la misma forma en todos los modelos, salvo, claro está, en el rizado de
los transitorios del estátor que se han eliminado, al despreciar la influencia de las
variaciones del flujo del estátor en las ecuaciones.
5-85 Cambio brusco de frecuencia. Modelo orden 1 clásico con saturación.
En resumen, el modelo reducido con flujo no lineal no presenta unos resultados
tan parecidos al modelo de referencia como el modelo de tercer orden, pero predice
mejor la evolución de las variables de la máquina que el modelo de primer orden lineal,
especialmente las variables eléctricas, salvo el caso del factor de potencia en los
regímenes próximos al vacío.
Tal y como pasaba con el modelo de tercer orden, en este modelo también
aumentará la diferencia con respecto al modelo de referencia cuanto más saturado esté
el flujo, pero también ocurrirá que en esta situación será siempre mejor la aproximación
que el modelo de primer orden de flujo lineal.

5 Modelos Reducidos
198