3‐d refraction statics · las figuras 2 y 3 ilustran el concepto básico. figura 2: trazados de...
TRANSCRIPT
3‐D Refraction Statics Dan Hampson and Brian Russell
María Virginia MasonOctubre 2008

2
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
INDICE GENERAL
Introducción……………………………………………………………………. 3 Extensión al caso 3-D…...................................................................................... 6 Uso de parches polinomiales ……………………………………………………11 Resultado del modelo ………………………………………………………….. 14 Resultado de datos reales ……………………………………………………… 16 Conclusiones…………………………………………………………………… 18

3
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
3-D REFRACTION STATICS DAN HAMPSON and BRIAN RUSSELL Durante los últimos años se ha mostrado un interés considerable en el problema de la determinación de correcciones estáticas para datos sísmicos a partir del análisis de arribos de refracciones o “first break”. Varios métodos han sido propuestos que difieren entre sí en sus cálculos detallados, pero se asemejan en el hecho de que han sido exitosos en superar los problemas de estáticas de corta y larga longitud de onda. Esto ha generado que las estáticas de refracción se han convertido en una componente estándar en el procesamiento sísmico en tierra. A pesar de que los varios métodos son más o menos extensibles a geometrías 3-D, los autores son consientes que al día de hoy no se ha publicado ningún análisis que detalle la extensión sistemática de un algoritmo de estáticas de refracción para datos sísmicos 3-D. Este trabajo mostrará la aplicación de un método, el de Inversión Lineal Generalizada (GLI), para el caso 3-D y analizará los beneficios y problemas asociados con tal extensión. El método de GLI consiste en proponer un modelo geológico del subsuelo cercano a la superficie, hacer un trazado de rayos a través de tal modelo para predecir los tiempos correspondientes a los primeros arribos teóricos, compararlos con los tiempos actuales y, finalmente, cambiar el modelo para reducir la discrepancia entre los dos conjuntos de tiempos (Hampson and Russell, 1984). En la práctica, este procedimiento es iterado varias veces. Debido a que es un modelo basado en el sistema de trazado de rayos, el método de GLI debería ser ideal para manejar geometrías 3-D o de formas arbitrarias. Pueden surgir dificultades en la actualización del modelo donde un conjunto de datos no-uniforme puede causar inestabilidad o resultados no confiables. La última instancia de la recolección de datos no uniformes ocurre en las fronteras del área 3-D donde el fold cae gradualmente a cero. Por supuesto, este problema de no unicidad está presente en todos los métodos de refracción, pero el método de GLI nos permite focalizar en esta cuestión de una manera sistemática. Para superar la distribución no uniforme de datos, se usa una nueva parametrización del modelo geológico que combina lengüetas bi-cubicas para la estructura geológica de onda larga con una parametrización de “celda” o “pixel” para la componente de onda corta. Esto se derivó del problema de tomografía, con el cual el método de GLI está muy relacionado. En este trabajo, se muestra la aplicación del método en conjuntos de datos tanto del modelo como reales. INTRODUCCION Durante los últimos anos, las estáticas de refracción han sido utilizadas con mucho éxito para corregir los efectos de las anomalías correspondientes al weathering cercano a la superficie. Como lo indica la Figura 2, estas anomalías se deben a la presencia de capas someras de baja velocidad cuyas profundidades y/o espesores varían lo suficientemente rápido como para causar una distorsión significante de la energía sísmica que pasa a través de ellas. Esta “distorsión” se manifiesta como un error en los

4
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
tiempos estructurales de las capas más profundas y como un borroneo de la imagen stacked.
Figura 1 Una gran cantidad de métodos han sido propuestos para analizar los tiempos correspondientes a los primeros arribos y calcular las correcciones estáticas. En particular, Hampson y Russell (1984) propusieron un método basado en la Inversión Lineal Generalizada cuyo objetivo es construir un modelo geológico consistente con los tiempos de los primeros arribos. Las Figuras 2 y 3 ilustran el concepto básico.
Figura 2: Trazados de rayos a través del modelo de tierra actual y a través del modelo de la aproximación
inicial.

5
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 3: Errores entre los tiempos observados y del modelo.
Suponemos que la tierra actual consiste de dos capas de baja velocidad ubicadas por encima de algún material de mayor velocidad como muestra el sector izquierdo de la Figura 2. Esto resultaría en una serie de breaks que son registrados y graficados en la Figura 3 como “tiempos observados”. Sin conocer la configuración actual de la tierra, podríamos suponer que las capas están dispuestas como muestra el panel derecho de la Figura 2. Mediante un trazado de rayos, podríamos calcular los tiempos para los cuales se espera que ocurran los breaks; esto está graficado en la Figura 3 con el nombre de “tiempos del modelo”. Si nuestra aproximación fuera exactamente correcta, y el programa para el trazado de rayos fuese exacto, esperaríamos que los tiempos del modelo coincidan con los observados. En general, la aproximación del modelo tendrá un error y habrá una discrepancia entre sus tiempos y los observados. La Figura 3 muestra el “error”, que es el resultado de restarle los tiempos del modelo a los tiempos observados. Mediante un análisis de este error, es posible estimar correcciones para nuestro modelo de aproximación inicial que mejorarán la correspondencia entre los breaks observados y los del modelo. El método de Inversión Lineal Generalizada es una manera sistemática de determinar las correcciones necesarias para mejorar este ajuste. En la práctica, se suelen realizar varias iteraciones en las cuales el modelo es actualizado sucesivamente como lo muestra la Figura 4. En cada iteración la discrepancia entre los breaks observados y del modelo es reducida.

6
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 4: Análisis de refracción mediante la Inversión Lineal Generalizada.
EXTENSION AL CASO 3-D A partir de este procedimiento, como sucede con todos los algoritmos para el análisis de refracción, surge la duda de su correcto funcionamiento con geometrías 3-D. Conceptualmente, el algoritmo de GLI debería ser extensible a cualquier geometría de adquisición ya que el procedimiento es una aproximación para el modelado. Sin embargo, en la práctica pueden ocurrir algunas dificultades relacionadas con la recolección de datos no-uniformes. Esto puede comprenderse considerando al método de GLI como uno muy cercano al problema de la tomografía (Chiu y Stewart, 1986; Stewart y Chiu, 1986). En el caso de la tomografía, uno comienza con una aproximación inicial del modelo y aplica un trazado de rayos tal como en el procedimiento de GLI. Luego el modelo es ajustado en aquellas partes donde penetran los rayos. Cualquier parte del modelo en donde los rayos no penetren no es modificada. Ante la presencia de picados ruidosos o incorrectos, la calidad del ajuste del modelo está directamente relacionada con la densidad de los rayos. En los lugares donde los rayos están más separados (típicamente en los bordes del modelo), el ajuste puede estar afectado por picados erróneos. En aquellos lugares donde los rayos son densos, la redundancia de información tiende a reducir el efecto de los errores. ¿Cómo se relaciona esto con el problema de estáticas de refracción? Básicamente, la actualización del modelo en el algoritmo de GLI es similar al procedimiento de la tomografía descripto anteriormente. Una actualización del modelo consiste en el cambio

7
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
tanto de las velocidades como de los espesores de cada capa. Estos cambios serán confiables en aquellos lugares del modelo donde penetren una cantidad suficiente de rayos. La Figura 5 muestra, por ejemplo, un único disparo en un modelo 3-D del subsuelo somero. Se supone que los receptores están ubicados alrededor el disparo con algún patrón especificado, y los caminos de los rayos corresponden a los arribos de las refracciones. Con este único disparo, podemos obtener información bastante confiable acerca de los espesores de las capas justo debajo del punto de disparo y mucho menos confiable acerca de los espesores de las capas debajo de cada receptor. En cuanto a los espesores de las capas fuera de los límites del disparo, no obtenemos información alguna. Intercambiando los roles del disparo y los receptores en la Figura 5, podemos concluir que se puede obtener información confiable acerca de los espesores de las capas en aquellas ubicaciones donde un único receptor recibe rayos provenientes de varios disparos.
Figura 5 En resumen, podemos concluir que la confiabilidad de la información acerca de los espesores de las capas está directamente relacionada con el fold de la superficie. Cuando tal fold es bajo en los bordes del relevamiento, el resultado será sensible a errores debido al picado. Otro problema potencial que surge en un análisis de refracción 3-D deriva del hecho de que las trazas a partir de un shot dado no necesitan corresponderse a un rango uniforme de offsets, como normalmente se esperaría en un relevamiento 2-D. De hecho, puede haber grupos de shots para los cuales no hay refracción desde la base de la capa meteorizada, dándonos ninguna información acerca de su espesor en aquellas

8
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
ubicaciones. Las Figuras 6 y 7 ilustran este efecto para el modelo sintético y para un conjunto de datos reales. Afortunadamente, el algoritmo de GLI maneja a los picados en cualquier orden, pero la falta de información en ciertas ubicaciones puede causar el mismo problema que la falta de fold de superficie. Mientras que la confiabilidad de los espesores de las capas puede estar relacionada con el fold de la superficie, la estimación de sus velocidades está más relacionada al fold del subsuelo. Como se ilustra en la Figura 8, el conjunto de rayos refractándose a través de una capa dada provee información en cuanto a su velocidad. La confiabilidad de la información acerca de la velocidad en cualquier punto está directamente relacionada con el número de rayos que pasan a través o cerca de tal punto (fold del subsuelo). Además, se necesita un rango de offsets. La Figura 9 ilustra el caso donde varios rayos pasan a través de un punto dado, pero como todos tienen el mismo offset fuente-receptor, no puede obtenerse ninguna información acerca de la velocidad en ese punto. Como sucede con la estimación del espesor de una capa, la confiabilidad de la información de la velocidad varía a través del área del relevamiento 3-D a medida que varía la geometría local de adquisición. Por supuesto, si en cualquier parte del relevamiento 3-D no penetran rayos, uno podría preguntarse qué diferencia hace si la estructura del subsuelo somero estimada es incorrecta. Esto es cierto si se desea usar el modelo final simplemente para calcular estáticas. El problema surge cuando la densidad de rayos no es cero, pero es lo suficientemente baja como para generar valores de estáticas no confiables en presencia de errores de picado. Estas estáticas no confiables causarán errores estructurales en nuestros datos sísmicos finales. Este problema es más agudo cerca de las fronteras de un programa 3-D donde el fold cae a cero gradualmente.
Figura 6 (a): Trazado de rayos a través de un modelo sintético.

9
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 6 (b): Primeros arribos calculados del perfil 3-D
Figura 7: Perfil de shot 3-D típico

10
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 8: Caminos de refracción de puntos medios comunes (distancias desiguales).
Figura 9: Caminos de refracción de puntos medios comunes (equidistantes).

11
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
USO DE PARCHES POLINOMIALES La Figura 10 muestra una perspectiva 3-D del plot de una capa sintética de baja velocidad. Esto podría representar, por ejemplo, la base de la capa meteorizada. En este diagrama, se supone que la superficie es plana. En la base de la figura se contornea el espesor de esta capa, y en la Figura 11 se repite el mapa de curvas de nivel en una perspectiva 2-D. Con el fin de poder manejar el ingreso de datos no uniformes, se propone modelar a esta superficie arbitraria con una serie de parches polinomiales que se conectan suavemente para formar la superficie. La Figura 12 muestra la superficie de contorno original dividida en cuatro parches. Cada uno estará representado por un polinomio cúbico de la forma: f (x) = a x3y3 + b x3y3 + c x3y + d x3 + e2y3 + f x2y2 + g x2y + h x2 + i x y3 + j x y2 + + k x y + l x + m y3 + n y2 + o y + p El polinomio tiene 16 términos, lo que implica que debemos proveer 16 coeficientes a, b, c.… para cada parche. Imponiendo la condición de que los parches deben ser continuos y deben tener derivadas primeras continuas a través de las fronteras, se reduce el número de coeficientes independientes. Para cualquier superficie arbitraria, y un número especificado de parches, puede construirse una superficie suave que aproxime a la superficie dada en el sentido de mínimos cuadrados. El número de parches controla el grado del suavizado impuesto sobre la superficie original. Si se usa un número de parches grande, el ajuste polinomial será casi exacto. Contrariamente, si se usan menos parches, se producirá una versión suavizada de la superficie original. Las Figuras 13 (a) y (b) muestran cómo se combinan los cuatro parches separados para formar la superficie de la Figura 10. Se puede notar que la perspectiva de la Figura 13 (b) está más “inclinada” que la de la Figura 10. El uso de parches polinomiales para ajustar la superficie 3-D actual puede ayudarnos de dos maneras. Primero, nos permite calcular valores de espesores y velocidad en cualquier ubicación que queramos. Dicho de otra manera, nos permite interpolar en regiones donde hay poco control. Segundo, nos permite aplicar cualquier grado de suavizado que deseemos eligiendo el número de parches a utilizar. Generalmente habrá varios rayos para cualquier parche dado y el resultado final consistirá en un ajuste de mínimos cuadrados a través de los valores de los datos crudos. Este ajuste será pesado por la densidad de rayos, por lo que aquellas regiones con una gran densidad tendrán una fuerte influencia en la forma del parche y ésta será extrapolada a regiones con una baja densidad de rayos. Ocasionalmente, habrá parches con ningún rayo. Éstos serán controlados por el hecho de que se deben plegar de una forma continua con los parches vecinos. El uso de parches polinomiales implica que nuestros modelos tendrán una suavidad determinada por el número de parches utilizado. Esto significa que sólo las componentes de mayor longitud de onda de la estática serán modeladas de esta manera. Como paso final será necesario estimar la superficie de corta longitud de onda consistente con el patrón de la estática a partir de los valores del error residual. Este procedimiento es idéntico al descripto por Hampson y Russell (1984).

12
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 10: Base de la capa meteorizada.
Figura 11

13
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 12
Figura 13(a): Separación en parches cúbicos. Figura 13(b): Superficie 3-D

14
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
RESULTADO DEL MODELO Se ilustrará este algoritmo con un ejemplo de modelo y con un resultado de datos reales. Ambos casos usaron la geometría de adquisición 3-D real que se muestra en la Figura 14. Esto muestra una serie de puntos de disparo ubicados según un patrón este-oeste y un conjunto de líneas de receptores en la dirección norte-sur. El programa entero cubre un cuadrado de aproximadamente 4 km de lado. Como muestra la Figura 14, el cubrimiento es prácticamente uniforme sobre el área programada; sin embargo hay una pérdida de cubrimiento en la esquina sudoeste. Debido al tamaño relativamente pequeño de este programa, cada capa de baja velocidad, como también las diferentes velocidades, será aproximada por un conjunto de cuatro parches como lo muestra la Figura 13. La Figura 15 muestra una superficie modelo que usaremos para demostrar la performance del algoritmo de inversión. El modelo consiste de una única capa de baja velocidad (610 m/s) ubicada por encima de un medio de mayor velocidad (2800 m/s). Para este ejemplo se tomó una superficie plana y no se muestra en la figura. Se pude observar un engrosamiento anómalo de la capa de baja velocidad hacia la esquina sudeste del modelo. Notar que esta superficie es de hecho una combinación de cuatro parches como fue descripto anteriormente. Como se impuso que los parches sean continuos, con derivadas primeras continuas, no hay discontinuidades en las intersecciones en la figura. Para probar el algoritmo de GLI, se trazaron rayos a través de este modelo y se ingresaron los tiempos de los primeros arribos resultantes en el algoritmo de GLI 3-D. Se debe ingresar al programa una aproximación inicial, y esto se muestra en la Figura 16. Ante la ausencia de cualquier otra información, se suele tomar como aproximación inicial a una capa espesor uniforme como lo muestra la Figura 16. Luego de cinco iteraciones, el algoritmo de GLI ha convergido a la solución que se muestra en la Figura 17. Si se la compara con la figura 15 se puede observar que se pudo recuperar la anomalía. Las Figuras 18 y 19 comparan curvas de contorno del modelo actual y del resultado final. Así, podemos ver ciertas discrepancias entre las dos, sin embargo esto no alcanza para afectar a los cálculos de las estáticas finales.
Figura 14

15
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 15: Modelo ingresado con la anomalía debida al weathering
Figura 16: Aproximación inicial: capa meteorizada de espesor constante.

16
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 17: Resultado final luego de 5 iteraciones.
Figura 18 Figura 19
RESULTADOS DE DATOS REALES Como se explicó en la sección anterior, la geometría de adquisición utilizada en este modelo ejemplo provino de un programa 3-D real. El resultado del picado de los primeros arribos para ese programa y el uso del algoritmo de GLI para derivar la geología del subsuelo somero se muestra en la Figura 20. En este caso hay dos capas de baja velocidad: una capa meteorizada de 610 m/s y una capa buzante de 2500 m/s. La velocidad del medio por debajo de la capa inclinada es de aproximadamente 2800 m/s.

17
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Se permitió que la velocidad varíe espacialmente en la capa buzante y en el medio por debajo. La Figura 20 muestra que el espesor de la capa meteorizada es de aproximadamente 15 m mientras que el de la capa inclinada varía desde 35 m a 60 m. Mientras que el gráfico de profundidad de la Figura 20 da una imagen geológica del subsuelo somero bastante realista, puede ser algo engañoso si se está tratando de deducir información acerca de las estáticas del weathering. La razón es que la magnitud de las anomalías del tiempo de tránsito está relacionada tanto con el espesor como con la velocidad de cada capa, y de hecho pequeñas variaciones en la capa meteorizada pueden tener un gran impacto sobre el patrón de estáticas debido a su baja velocidad. La Figura 21 muestra que mientras que la capa meteorizada es mucho más delgada que la capa buzante, el tiempo de tránsito a través de ambas capas es casi el mismo, por lo que sus contribuciones al patrón de las estáticas finales son aproximadamente iguales. Un gráfico más útil es el del espesor de la capa en unidades de tiempo de tránsito (profundidad/velocidad). La Figura 22 muestra el resultado final para el programa 3-D en unidades de tiempo de viaje y, como es esperado, ambas capas contribuyen de igual manera al stack final. Mientras que no haya mayores anomalías de estáticas podemos observar un engrosamiento de ambas capas hacia el borde oeste del programa.
Figura 20: DATOS REALES: Resultado final mostrando la base de las capas de baja velocidad.
La corrección final de la estática de larga longitud de onda es calculada reemplazando cada capa de baja velocidad por un material de igual espesor pero de alta velocidad. En este caso, la velocidad de reemplazo se fijó igual a 2800 m/s. El patrón de estáticas final se muestra en la Figura 23. Esta Figura muestra la estática “one-way” porque debe ser aplicada en forma separada para cada posición del receptor y del punto de disparo. La estática resultante para cualquier traza es la suma de estas dos componentes. Se puede observar en el patrón de la estática una tendencia general de este a oeste que debería afectar la estructura final de los datos sísmicos 3-D. Para

18
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
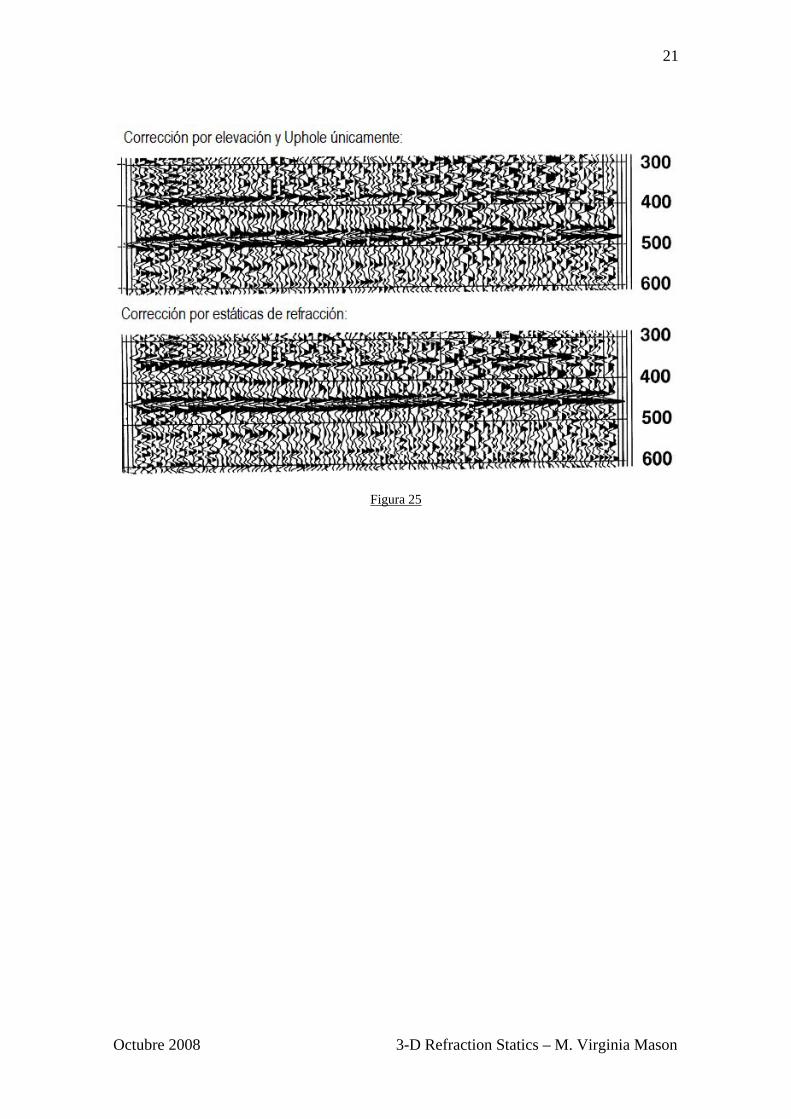
chequear esto, se examinó la línea este-oeste ubicada en el centro del programa y se muestra con una línea sólida en la Figura 23. En la Figura 24 se muestra una comparación de las secciones stacked con y sin la aplicación de las correcciones de estáticas de refracción. En el sector izquierdo de la figura, vemos el stack sólo con correcciones de uphole y de elevación, mientras que el sector derecho muestra el resultado de la aplicación de estáticas de refracción. La inclinación de la estática hacia el margen oeste de la línea ha sido corregida por las estáticas de refracción. Además, la continuidad de los eventos ha sido mejorada mediante la aplicación de la solución de la estática de corta longitud de onda. Esto es particularmente evidente en la Figura 25 que muestra un zoom de una ventana de datos. CONCLUSIONES En este trabajo se ha propuesto un nuevo método de interpretación 3-D de refracciones. Éste está basado en la técnica de inversión lineal generalizada (GLI) e incorpora una parametrización del modelo geológico que supera la distribución no uniforme de datos. Las ventajas de este método son:
• se realiza un trazado de rayos 3-D verdadero del modelo del subsuelo somero, • se puede manejar una geometría de adquisición arbitraria, • se puede incorporar como condición un modelo geológico verdadero, • los cambios laterales de velocidad son determinados automáticamente, y • puede calcularse un número arbitrario de capas del subsuelo somero.
A partir de los resultados de los datos del modelo y reales se muestra que este método converge rápidamente a un modelo de profundidad y velocidad exacto del subsuelo somero. Se mostró el cálculo de la componente de la estática a partir de este modelo para dar una imagen sísmica estructural mejorada.

19
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 21
Figura 22: DATOS REALES: Base de las capas de baja velocidad usando escalas de tiempo de recorrido.

20
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 23
Figura 24
21
Octubre 2008 3-D Refraction Statics – M. Virginia Mason
Figura 25