2. conceptos...
TRANSCRIPT

2. Conceptos básicos.
En este capitulo se pretende hacer una introducción a las redes cristalinas y suspropiedades. Consideraremos primero a los átomos en su posición de equilibrio en redes perfec-tas. Luego le introduciremos a estas redes ”perfectas” los defectos, ya que como sabemos lasredes cristalinas son idealizaciones que no encontramos en la realidad. Los materiales poseenen su estructura cantidades de defectos que dependen de numerosos factores.
2.1. Sistemas cristalinos y redes de Bravais.
La mayor parte de los sólidos de la naturaleza son cristalinos lo que signi�ca quelos átomos, moléculas o iones que los forman se disponen ordenados geométricamente en elespacio. Esta estructura ordenada no se aprecia en muchos casos a simple vista porque estánformados por un conjunto de microcristales orientados de diferentes maneras formando unaestructura policristalina, aparentemente amorfa. Esta disposición reticular se opone al desordenque se mani�estan en los gases o líquidos. Cuando un mineral no presenta estructura cristalinase denomina amorfo. Las redes cristalinas se caracterizan fundamentalmente por un ordeno periodicidad. La estructura interna de los cristales viene representada por la llamada celaunidad que se repite una y otra vez en las tres direcciones del espacio. El tamaño de esta celdaviene determinado por la longitud de sus tres aristas (a, b, c), y la forma por el valor de losángulos entre dichas aristas (α, β, γ) ver Fig.(1a).
(a) (b)
Figura 1: (a) Red espacial de un solido cristalino ideal y (b) celda unitaria mostrando las constantes de la red.
Combinando las dos traslaciones y el ángulo que forman entre sí, sólo hay cinco posi-bles formaciones de redes planas: paralelogramo, rectángulo, cuadrado, hexágono y rombo. Siformamos una red espacial apilando estas redes planas, sólo existen catorce posibles formacionesque representan las formas más sencillas en que puede descomponerse la materia cristalina sinque por ello pierdan sus propiedades originales, son las llamadas redes de Bravais1. Las celdasde bravais tridimensionales pueden verse en la Figura (2). Desde el punto de vista geométricoy cristalográ�co una red de Bravais es una disposición de puntos cuya estructura es invariantebajo cierto grupo de traslaciones. En la mayoría de casos también se da una invariancia bajo
1August Bravais (1811-1863). Cristalográ�co francés que estableció los 14 posibles ordenamientos de puntosen el espacio.
6

Figura 2: Las 14 celdas de Bravais según los sistemas cristalinos.
rotaciones o simetría rotacional. Estas propiedades hacen que en todos los puntos de la red deBravais se tenga la misma perspectiva de la red. Decimos entonces que todos los puntos de lared son equivalentes. Una red unidimensional es el caso mas elemental, simplemente consisteen una secuencia de nodos equidistantes entre si. En dos o tres dimensiones las cosas se hacenun poco mas complicadas y la variedad de formas obliga a de�nir ciertas estructuras patrónpara trabajar (Figura (2)). Para generar dichas redes, normalmente se utiliza en concepto decelda primitiva. Las celdas unitarias, son paralelogramos en (2D) o paralelepípedos en (3D)que constituyen la menor subdivisión de una red cristalina que conserva las características entoda su retícula. Una red típica de Bravais se representa de la siguiente manera
R =n∑i=1
vi~ai|vi ∈ Zn, (1)
donde ai es la base de la red y n la dimensión espacial que se considere.
2.2. Defectos en Materiales cristalinos.
En realidad no existen cristales perfectos pues contienen varios tipos de defectosque afectan a muchas de las propiedades físicas y mecánicas, que a su vez afectan a muchaspropiedades importantes de los materiales para la ingeniería, como la conformación en fríode aleaciones, la conductividad eléctrica de semiconductores, la velocidad de migración de losátomos en aleaciones y corrosión. Todas las redes cristalinas reales contienen imperfecciones,las cuales pueden ser puntuales, ocurriendo en un solo punto de la red; lineales, ocurriendo a lo
7

largo de una �la de átomos; o defectos planos, ocurriendo en un plano 2D de la red. Las mismasperturban localmente la disposición regular de la red atómica. Su presencia puede modi�carsigni�cativamente las propiedades eléctricas y mecánicas de los sólidos cristalinos. Si bien esquizás intuitivo pensar en los defectos como cosas malas, por el contrario, son necesarios.Muchas, o quizá todas, las ramas de la ciencia que estudian las diferentes propiedades de losmateriales depende de la existencia de algún tipo de defectos. Los defectos en la red cristalinase clasi�can según su forma y geometría. Los tres grupos principales son: 1) defectos puntualeso de dimensión cero, 2) defectos de linea o de una dimensión (dislocaciones) y 3) defectos dedos dimensiones que incluyen super�cies externas y super�cies limite de grano. Los defectosmacroscopicos tridimensionales o de volumen también pueden incluirse. En este trabajo noscentraremos en las dislocaciones, pero en este apartado haremos un breve recorrido por losdistintos tipos de defectos para luego enfocarnos en las dislocaciones.
2.2.1. Defectos Puntuales.
El defecto puntual mas sencillo es de vacante, un sitio atómico en el que he de de-saparecido el átomo que lo ocupaba (Figura 3a). Las vacantes pueden producirse durante lasolidi�cación como resultado de perturbaciones locales durante el crecimiento de los cristales,o por las reordenaciones atómicas en un cristal ya existente debido movilidad de los átomos.En los metales, la concentración de vacante en el equilibrio, raramente excede de aproximada-mente 1 átomo en 10000. Las vacantes son defectos en equilibrio y su energía de formaciónes del orden de 1 eV. En los metales pueden introducirse vacante adicionales durante la de-formación plástica, por el enfriamiento rápido desde elevadas temperaturas y por bombardeode partículas a alta energía, como son los neutrones. Las vacantes que no están en equilibriotienden a formar aglomerados , formando divacantes o trivacantes. Las vacantes pueden mo-verse intercambiando su posición con sus vecinas. Este proceso es importante en la migración odifusión de átomos en estado solido, particularmente a temperaturas elevadas donde la movil-idad de los átomos es mayor. Algunas veces un átomo de un cristal puede ocupar un huecointersticial entre los átomos de su entorno que ocupan posiciones atómicas normales (Figura(3b)). Este tipo de defectos puntuales se llama autointersticial o intersticialidad. Estos defectosno ocurren generalmente de forma natural por la distorsion estructural que provocan, pero sepueden introducir en la estructura por irradiacion. En cristales iónicos los defectos puntualesson más complejos debido a la necesidad de mantener la neutralidad eléctrica. Cuando dosiones de carga opuesta faltan en un cristal iónico, se crea una divacante aniónica-catiónicaque se conoce como defecto de Schottky (Figura (4)). Si un catión se mueve a un huecointersticial del cristal iónico, se crea una nueva vacante catiónica en la posición inicial delcatión. Este par defectos vacante-intersticio se llama defecto de Frenkel (Figura (4)). Lapresencia estos defectos en los cristales iónicos, aumenta la actividad eléctrica. Los átomos deimpurezas de tipo sustitucional o intersticial son también defectos puntuales y se pueden pre-sentar en cristales con enlaces metálicos o covalentes. Por ejemplo, cantidades muy pequeñasde impurezas sustitucionales en silicio puro, pueden afectar mucho su conductividad eléctricapara su uso en dispositivos electrónicos. Las impurezas iónicas son también defectos puntualesen cristales iónicos.
8

(a) (b)
Figura 3: (a) Vacante. (b) Intersticial o autointersticial, defectos puntuales en una red metalica compacta.
Figura 4: Representacion en dos dimenciones de un cristal ionico ilustrando un defecto de Schottky y un defecto de Frenkel.
2.2.2. Defectos planos.
Los defectos que se remiten a un plano, es decir 2D, son por ejemplo super�ciesexternas, limites de grano, maclas, bordes de ángulo, borde de ángulos abierto, torsiones yfallas de apilamiento. La super�cie libre o externa de cualquier material es el tipo más comúnde defecto de plano. Las super�cies externas se consideran defectos debido a que los átomos dela super�cie están enlazados a otros átomos solo por un lado. Por consiguiente, los átomos dela super�cie tienen un menor número de vecinos. Como resultado de ello, estos átomos tienenun mayor estado de energía en comparación con los átomos situados dentro del cristal, con unnúmero óptimo de vecinos. La mayor energía asociada con los átomos de la super�cie de unmaterial hace a la super�cie susceptible a la erosión y a reaccionar con elementos del ambiente.Este punto ilustra con mayor claridad la importancia de los defectos en el desempeño de losmateriales. Los límites de grano son una clase de defectos en la super�cie de los materialespolicristalinos donde se separan los granos (cristales) de diferentes orientaciones. En los metales,los limites de grano se originan durante la solidi�cación, cunado los cristales formados desde
9
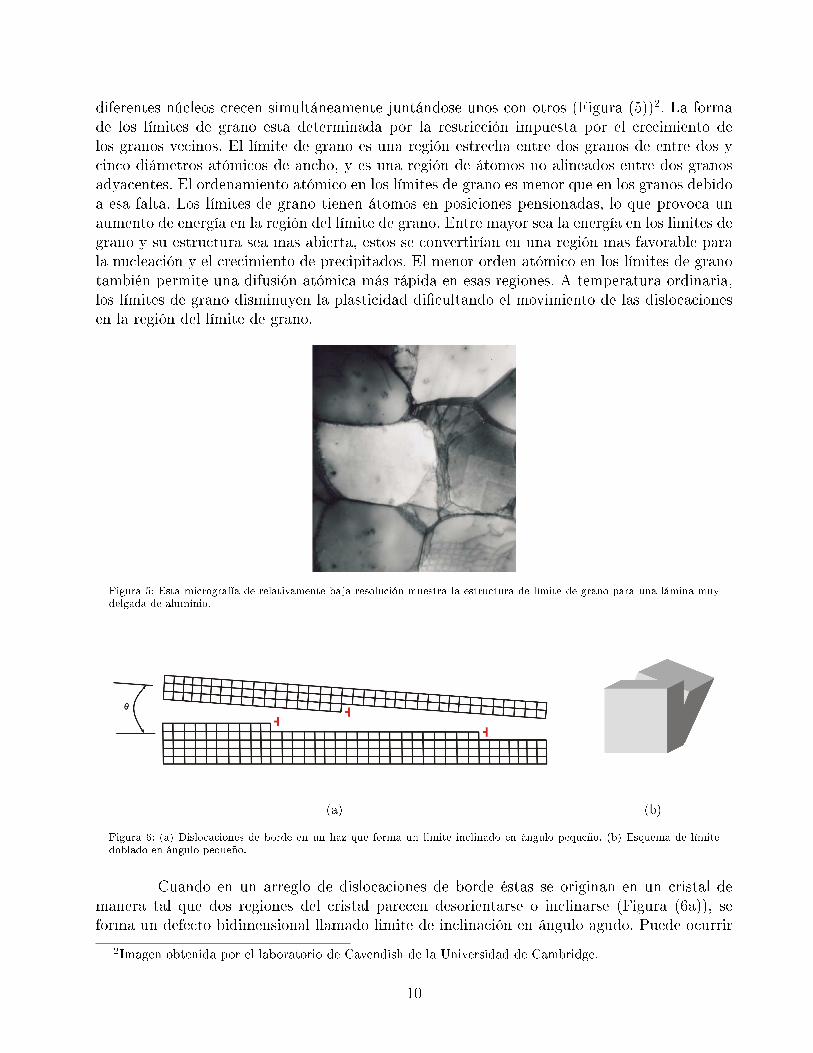
diferentes núcleos crecen simultáneamente juntándose unos con otros (Figura (5))2. La formade los límites de grano esta determinada por la restricción impuesta por el crecimiento delos granos vecinos. El límite de grano es una región estrecha entre dos granos de entre dos ycinco diámetros atómicos de ancho, y es una región de átomos no alineados entre dos granosadyacentes. El ordenamiento atómico en los límites de grano es menor que en los granos debidoa esa falta. Los límites de grano tienen átomos en posiciones pensionadas, lo que provoca unaumento de energía en la región del límite de grano. Entre mayor sea la energía en los limites degrano y su estructura sea mas abierta, estos se convertirían en una región mas favorable parala nucleación y el crecimiento de precipitados. El menor orden atómico en los límites de granotambién permite una difusión atómica más rápida en esas regiones. A temperatura ordinaria,los límites de grano disminuyen la plasticidad di�cultando el movimiento de las dislocacionesen la región del límite de grano.
Figura 5: Esta micrografía de relativamente baja resolución muestra la estructura de límite de grano para una lámina muydelgada de aluminio.
(a) (b)
Figura 6: (a) Dislocaciones de borde en un haz que forma un limite inclinado en ángulo pequeño. (b) Esquema de límitedoblado en ángulo pequeño.
Cuando en un arreglo de dislocaciones de borde éstas se originan en un cristal demanera tal que dos regiones del cristal parecen desorientarse o inclinarse (Figura (6a)), seforma un defecto bidimensional llamado limite de inclinación en ángulo agudo. Puede ocurrir
2Imagen obtenida por el laboratorio de Cavendish de la Universidad de Cambridge.
10

un fenómeno similar cuando una red de dislocaciones helicoidales crea un limite de torsión enángulo agudo (Figura (6b). El ángulo de desorientación θ de un limite de ángulo agudo sueleser menor a 10 grados. A medida que aumenta la densidad de las dislocaciones en los limitesen ángulo agudo (inclinación o torsión), aumenta el ángulo de desorientación θ. Si θ es mayorque 20 grado, el limite ya no se caracteriza como ángulo agudo, sino como un limite general degrano. De manera similar a las dislocaciones, los borde de ángulo agudo son regiones de altaenergía debido a las distorsiones locales de la red tienden a endurecer a un metal.
Una red atómica de Brabais puede formarse a partir de un apilamiento de capas deátomos en una secuencia regular. Por ejemplo una red BCC puede formarse a partir de apilarplanos (100) o (110) en la dirección 111. De la ruptura de esta regularidad se desprende otrodefecto de tipo 2D, el cual denominamos fallo de apilamiento. La presencia de de este tipo de
(a) (b)
Figura 7: Defecto de apilamiento en una estructura cubica centrada en las caras (FCC). La secuencias normal de apilamientoen los planos (111) es ABCA..., los planos en sin defectos son separados por la distancia 4, mientras que con el error seseparan por 5: (a) defecto de apilamiento intrínseco (b) defecto de apilamiento extrínseco.
fallos juega un rol importante en la plasticidad de los cristales. En redes con estructura tipoFCC dos posibles fallos de este tipo don posibles, no referiremos a ellos como intrínseco yextrínseco. Estos se deben al cambio resultante de remover o introducir una capa extra. En laFigura (7a) parte de la capa C fue removida. En la Figura (7b), en cambio, una capa extra esintroducida entre las capas A y B.
Es importante señalar que, en términos generales, de los defectos bidimensionales quese comentaron anteriormente, los limites de grano son los mas e�caces para endurecer a unmetal.
2.2.3. Defectos de Volumen.
Precipitados, huecos y burbujas son defectos de este tipo que pueden ocurrir bajociertas circunstancias y tienen importantes efectos sobre la propiedad de los sólidos cristalinos.Los nanohuecos los podemos pensar como un conjunto de vacancias puntuales. Al rededor denanohuecos es donde se originan o nuclean otro tipo de defecto tales como las dislocaciones.Publicaciones recientes muestran que la interacción entre las dislocaciones y los precipitadostienen una rol vital en el desarrollo de aleaciones de altas resistencias.
11

2.3. Dislocaciones.
Los defectos lineales o dislocaciones es los sólidos cristalinos son defectos que provo-can una distorsión de la red centrada a lo largo de una línea. Auque hoy hay muchas técnicasdisponibles para la visualización de este tipo de defectos de línea, es decir para ver las dis-locaciones en un material, la existencia de estos defectos fue deducida entre los años 1934 acomienzos de la década de los 50. Fuerte evidencia surgió de intentar explicar las diferenciasentre los valores teóricos y los resultados experimentales de la tensión de corte necesaria paradeformar plásticamente un cristal. Hoy sabemos que esta deformación existe por que en elcristal se encuentran defectos que permiten que planos atómicos deslicen respecto a otros posi-bilitando esta deformación. En un cristal perfecto, es decir, en ausencia de dislocaciones, latensión requerida para hacer que haya un deslizamiento en un plano de átomos respecto a otroen un movimiento que mantenga la red invariante fue calculada por primera vez por Frenkelen 1926. La situación es ilustrada en la Figura (8). Asumiendo que hay una fuerza constanteperiódica requerida para mover la �la de átomos de arriba a lo largo de la �la inferior es unafunción sinusoidal de la siguiente forma
τ =Gb
2πasen
2πx
b, (2)
donde τ es la tensión de corte aplicada, G es el modulo de corte, b es el espaciado entrelos átomos en la dirección de la tensión de corte, a es el espaciamiento entre �las o planos(si consideramos 3D) de átomos y x es la traslación entre las dos �las desde una posición deminima energía a otra posición de equilibrio. El termino derecho de la ecuación (2) es periódico
Figura 8: Esquema utilizado para estimar la tensión de corte máxima teórica para un deslizamiento.
en b y se reduce a la ley de Hooke para pequeñas deformaciones x/a, es decir, que en pequeñasdeformaciones sen(2πx/b) ≈ (2πx/b). El valor máximo de τ es entonces la máxima tensióncritica teórica
τth =b
afracG2π, (3)
Como b ≈ a, la resistencia teórica de corte es una considerable fracción del modulode elasticidad. Usando expresiones mas realistas para la fuerza como una función del campode desplazamiento, se obtienen valores teóricos de τth ≈ G/30. De todas formas estas aproxi-maciones muestran que τth es de algunos ordenes de magnitud mayor que los valores obtenidosen mediciones reales. Esta llamativa diferencia entre la predicción y los valores experimentales
12
fueron explicados y asociados a la presencia de dislocaciones por Orowan, Polanyi y Tayloren 1934. Luego de aquel entonces fue posible producir cristales en forma de �bras de pequeñodiámetro (llamados Whiskers) los cuales poseen un alto grado de perfección en su estructuracristalina. Estos materiales pueden llegar a fabricarse libres de dislocaciones y su resistencia esmuy cercana al valor teórico. Otra evidencia la cual contribuyó apreciablemente a la aceptación
(a)
(b)
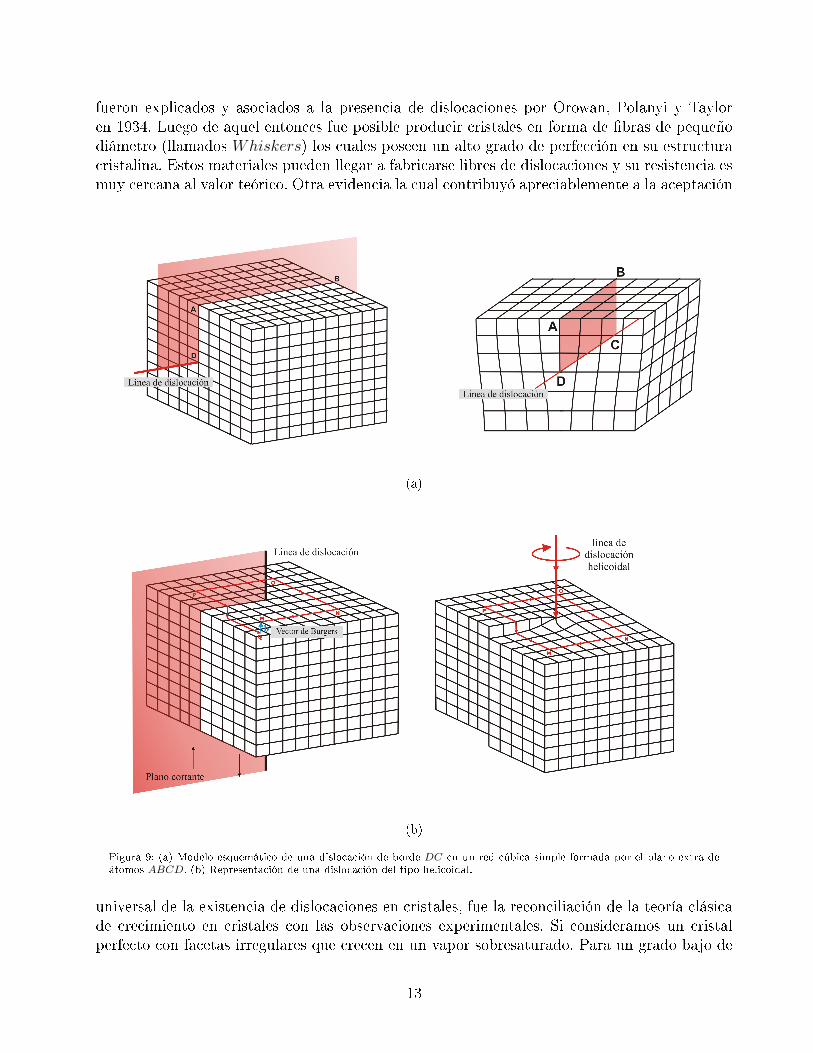
Figura 9: (a) Modelo esquemático de una dislocación de borde DC en un red cúbica simple formada por el plano extra deátomos ABCD. (b) Representación de una dislocación del tipo helicoidal.
universal de la existencia de dislocaciones en cristales, fue la reconciliación de la teoría clásicade crecimiento en cristales con las observaciones experimentales. Si consideramos un cristalperfecto con facetas irregulares que crecen en un vapor sobresaturado. Para un grado bajo de
13

Figura 10: Esquema que de una dislocación mixta en un cristal. La línea de dislocación AB es del tipo helicoidal pura cuandoentra en el cristal a la izquierda y del tipo arista o borde pura cuando deja el cristal.
sobresaturación, el crecimiento ocurre por la deposición de átomos sobre las regiones imper-fectas o irregulares del cristal. La deposición preferencial en las regiones imperfectas resulta enla formación de caras más perfecta que consiste en arreglos de planos de máxima capacidad odensidad de átomos. Además del crecimiento luego se requiere la nucleación de nuevas capasde átomos sobre una super�cie suave. Este es un proceso mucho mas di�cultoso, y la teoría denucleación predice que para que el crecimiento ocurra se requiere un grado de sobresaturaciónde aproximadamente un 50%. Esta predicción es muy dispar a algunas observaciones experi-mentales muestran que el crecimiento ocurre a una sobresaturación de 1%. La di�cultad fueluego resuelta cuando se demostró que la presencia de dislocaciones en el cristal durante el crec-imiento genera escalones sobre las caras del cristal los cuales no se eliminan por la deposiciónpreferencial, como en un cristal perfecto. Estos escalones proveen sitios para la deposición y asíeliminar la di�cultad para el proceso de nucleación. Para que se produzca deformación plásticaen los cristales metálicos grandes a baja tensión de cizalladura, es necesaria una alta densidadde dislocaciones. Un gran numero de estas (≈ 106cm/cm3) se forman durante la solidi�cacióndel metal, pero se generan muchas mas durante la deformación del metal; debido a esto, unmetal severamente deformado puede alcanzar un densidad de hasta (1012cm/cm3).
2.3.1. Geometría de las dislocaciones.
En este apartado haremos una descripción de la geometría básica de una dislocacióntipo tornillo o helicoidal y una dislocación de borde o arista. Estos términos provienen del inglesscrew y edge respectivamente. Consideremos una red cristalina cúbica simple, por convenienciaasumimos que los enlaces pueden ser representados por muelles �exibles entre átomos vecinos.Hay que destacar que el enlazamiento en los sólidos reales es mas complejo y, de hecho, lanaturaleza de los enlaces determina la disposición de los átomos alrededor de una dislocación.
14

En la Figura (9a) vemos que la disposición de una dislocación de borde puede ser simuladasuponiendo que los enlaces sobre la super�cie ABCD son rotos y las super�cies del cristal aambos lados del plano son separadas y un plano extra de átomos es disertado en la ranura.La de�exión y distorsión de los enlaces decrece cuando incrementamos la distancia desde lalínea de dislocación. Esta línea DC es llamada dislocación de borde. La disposición de átomosalrededor de una dislocación del tipo helicoidal se ve claramente en la Figura (9b). La dislo-cación helicoidal se forma a partir de un cristal perfecto aplicando esfuerzos cortantes haciaarriba y hacia abajo a los lados del plano que rompe los enlaces entre átomos. La región dis-torsionada del cristal no es bien de�nida y tiene cuanto menos varios átomos de de diámetro.Esta cuestión la veremos en los apartados siguientes. Con frecuencia los cristales exhiben mez-cla de las dislocaciones anteriores. Su vector de Burgers, concepto que introduciremos en elsiguiente apartado, no es ni perpendicular ni paralelo a la línea de dislocación, pero mantieneuna orientación �ja en el espacio. La estructura atómica local en torno a la dislocación mixtaes difícil de visualizar, pero el vector de Burgers proporciona una descripción conveniente ysencilla. Una representación de este tipo de dislocación se muestra en la Figura (10).
2.3.2. Vector y circuito de Burgers.
La de�nición mas utilizada de una dislocación es dada en términos del circuito deBurgers. Un circuito de Burgers es una trayectoria cerrada tomada en un cristal que contienedislocaciones, la cual se hace de átomo a átomo. Tal trayectoria es ilustrada en la Figura(11a), es decir MNOPQ. Si la misma trayectoria átomo a átomo se hace en un cristal librede dislocaciones, Figura (11b), y la trayectoria no es cerrada, luego el primer circuito, Figura(11a), contiene una o mas dislocaciones. El vector requerido para completar o cerrar el circuitoes llamado vector de burgers. Cuando el circuito de Burgers es dibujado alrededor de una
(a) (b)
Figura 11: (a) Circuito de Burgers alrededor de una dislocación tipo borde perpendicular al folio. (b) El mismo circuito deBurgers en un cristal perfecto libre de defectos. El error de cierre es el vector de Burgers b.
dislocación tipo tornillo (Figura (9b)), nuevamente con un circuito cerrado en un cristal quecontiene la dislocación, el vector de Burgers QM es paralelo a la línea de dislocación. Estoconduce a dos reglas importantes,
a) El vector de Burgers de una dislocación de borde es normal a la línea de la dislocación.
15
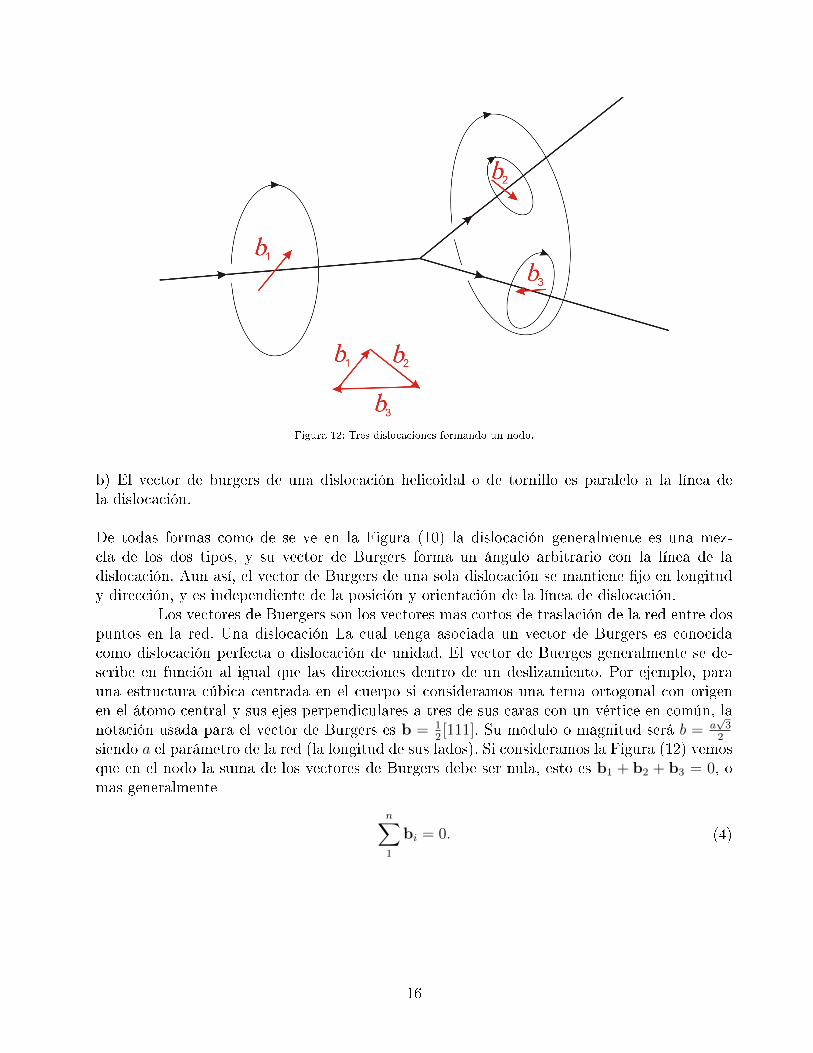
Figura 12: Tres dislocaciones formando un nodo.
b) El vector de burgers de una dislocación helicoidal o de tornillo es paralelo a la línea dela dislocación.
De todas formas como de se ve en la Figura (10) la dislocación generalmente es una mez-cla de los dos tipos, y su vector de Burgers forma un ángulo arbitrario con la línea de ladislocación. Aun así, el vector de Burgers de una sola dislocación se mantiene �jo en longitudy dirección, y es independiente de la posición y orientación de la línea de dislocación.
Los vectores de Buergers son los vectores mas cortos de traslación de la red entre dospuntos en la red. Una dislocación La cual tenga asociada un vector de Burgers es conocidacomo dislocación perfecta o dislocación de unidad. El vector de Buerges generalmente se de-scribe en función al igual que las direcciones dentro de un deslizamiento. Por ejemplo, parauna estructura cúbica centrada en el cuerpo si consideramos una terna ortogonal con origenen el átomo central y sus ejes perpendiculares a tres de sus caras con un vértice en común, lanotación usada para el vector de Burgers es b = 1
2[111]. Su modulo o magnitud será b = a
√3
2
siendo a el parámetro de la red (la longitud de sus lados). Si consideramos la Figura (12) vemosque en el nodo la suma de los vectores de Burgers debe ser nula, esto es b1 + b2 + b3 = 0, omas generalmente
n∑1
bi = 0. (4)
16