150-qs003e-es-p, controlador inteligente de motores...
TRANSCRIPT
Controlador inteligente de motores SMC-50Boletín150
Inicio rápidoTraducción de las instrucciones originales
Información importante para el usuario
Lea este documento y los documentos que se indican en la sección Recursos adicionales sobre instalación, configuración y operación de este equipo antes de instalar, configurar, operar o dar mantenimiento a este producto. Los usuarios deben familiarizarse con las instrucciones de instalación y cableado, y con los requisitos de todos los códigos, las leyes y las normas vigentes.
Las actividades que incluyan instalación, ajustes, puesta en servicio, uso, montaje, desmontaje y mantenimiento deberán ser realizadas por personal debidamente capacitado de conformidad con el código de prácticas aplicable.
Si este equipo se utiliza de una forma diferente a la indicada por el fabricante, la protección proporcionada por el equipo podría verse afectada.
En ningún caso, Rockwell Automation Inc. será responsable de daños indirectos o derivados del uso o de la aplicación de este equipo.
Los ejemplos y los diagramas que aparecen en este manual se incluyen únicamente con fines ilustrativos. Debido a las numerosas variables y requisitos asociados con cada instalación en particular, Rockwell Automation, Inc. no puede asumir ninguna responsabilidad ni obligación por el uso basado en los ejemplos y los diagramas.
Rockwell Automation, Inc. no asume ninguna obligación de patente con respecto al uso de la información, los circuitos, los equipos o el software descritos en este manual.
Se prohíbe la reproducción total o parcial del contenido de este manual sin la autorización por escrito de Rockwell Automation, Inc.
Este manual contiene notas de seguridad en cada circunstancia en que se estimen necesarias.
También puede haber etiquetas sobre el equipo o dentro del mismo, con el fin de recomendar precauciones específicas.
ADVERTENCIA: Identifica información sobre prácticas o circunstancias que pueden causar una explosión en un ambiente peligroso, lo que puede ocasionar lesiones personales o la muerte, daños materiales o pérdidas económicas.
ATENCIÓN: Identifica información sobre prácticas o circunstancias que pueden producir lesiones personales o la muerte, daños materiales o pérdidas económicas. Los mensajes de Atención le ayudan a identificar un peligro, a evitar un peligro y a reconocer las consecuencias.
IMPORTANTE Identifica información esencial para usar el producto y comprender su funcionamiento.
PELIGRO DE CHOQUE: Puede haber etiquetas en el exterior o en el interior del equipo (por ejemplo, en un variador o en un motor) para advertir sobre la posible presencia de voltajes peligrosos.
PELIGRO DE QUEMADURA: Puede haber etiquetas en el exterior o en el interior del equipo (por ejemplo, en un variador o en un motor) para advertir sobre superficies que podrían alcanzar temperaturas peligrosas.
PELIGRO DE ARCO ELÉCTRICO: Puede haber etiquetas en el exterior o en el interior del equipo (por ejemplo en un centro de control de motores) para alertar sobre la posibilidad de que se produzca un arco eléctrico. Los arcos eléctricos causan lesiones graves o la muerte. Use el equipo de protección personal (PPE) apropiado. Siga TODOS los requisitos normativos respecto a prácticas de trabajo seguras y respecto al equipo de protección personal (PPE).
Tabla de contenido
Prefacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3Acerca de esta publicación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Recursos adicionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Terminología . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Precauciones generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Resumen de cambios. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Capítulo 1Instalación Envolventes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Requisitos de montaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Dimensiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Cableado de alimentación eléctrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Orejetas de alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Diagramas de alimentación típicos . . . . . . . . . . . . . . . . . . . . . . . . . . 12Cableado de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Bloque de terminales de control estándar . . . . . . . . . . . . . . . . . . . . 13Especificaciones de cableado de control . . . . . . . . . . . . . . . . . . . . . . 13Ejemplos de cableado de control típico . . . . . . . . . . . . . . . . . . . . . . 15
Cableado del ventilador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Unidades de derivación integrada . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Unidades de estado sólido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Unidades actualizadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Módulos de opción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Operación y diagramas de derivación. . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Controladores SMC-50 con derivación interna . . . . . . . . . . . . . . 19Controladores SMC-50 con derivación externa . . . . . . . . . . . . . . 19
Capítulo 2Programación Configuración de parámetros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Configuración de parámetros mediante el uso de un módulo 20-HIM-A6 (FRN1.006 o posterior). . . . . . . . . . . . . . . . . . . . . . . . 23
Acceso a parámetros básicos y estructura de categorías/archivos . . . 24Acceso a parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Estructura de categorías/archivos . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Configuración rápida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Capítulo 3Operación y resolución de problemas
Operación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Configuración del motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Ajuste de motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Control de carga resistiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Resolución de problemas mediante los LED de diagnóstico . . . . . . . 31
Indicador de estado de los LED del controlador . . . . . . . . . . . . . . 31Resolución de problemas con equipo de monitoreo. . . . . . . . . . . . . . . 31Resolución de problemas según código de fallo – Lista abreviada. . . 31
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 1

Tabla de contenido
Apéndice AClasificaciones SCCR Clasificaciones SCCR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
Prefacio
Acerca de esta publicación Esta guía de inicio rápido le proporciona la información básica requerida para instalar, poner en marcha y programar el arrancador suave SMC™-50.
El arrancador suave SMC-50 es un arrancador suave de voltaje reducido que usa un módulo de control basado en un microprocesador avanzado. Cuando se usan seis rectificadores controlados de silicio consecutivos (SCR) (dos por fase), el arrancador suave SMC-50 proporciona aceleración controlada, operación/marcha y desaceleración de motores de inducción asíncronos estándar. Las estructuras de alimentación están disponibles con un conector de derivación integral o sin este (estado sólido).
La información de esta guía de inicio rápido no reemplaza el manual del usuario. La guía de inicio rápido supone que el instalador es una persona calificada con previa experiencia y entendimiento básico de la terminología eléctrica, procedimientos de configuración, equipo requerido y precauciones de seguridad.
Por la seguridad del personal de mantenimiento y de otras personas que pueden sufrir exposición a peligros eléctricos asociados con las actividades de mantenimiento, siga todas las prácticas de trabajo seguras locales (por ejemplo, las normas de NFPA 70E, Parte II, en los Estados Unidos). El personal de mantenimiento debe recibir capacitación en prácticas, procedimientos y requisitos de seguridad relacionados con sus respectivas asignaciones de trabajo.
Recursos adicionales Estos documentos contienen información adicional relativa a productos relacionados de Rockwell Automation.
Puede ver o descargar publicaciones en http://www.rockwellautomation.com/global/literature-library/overview.page. Para solicitar copias impresas de la documentación técnica, comuníquese con el distribuidor de Allen-Bradley o representante de ventas de Rockwell Automation correspondientes a su localidad.
Terminología En esta publicación también hacemos referencia al arrancador suave SMC-50 como el controlador SMC-50. Estos términos son intercambiables.
Recurso Descripción
SMC-50 Controller User Manual, publicación 150-UM011 Proporciona amplia información al usuario sobre el controlador SMC-50.
SMC-50 Controller Selection Guide, publicación 150-SG010 Proporciona amplia información sobre la selección del controlador y accesorios SMC-50.
PowerFlex™ 20-HIM-A6 and 20-HIM-C6S HIM (Human Interface Module), publicación 20HIM-UM001
Proporciona amplia información al usuario sobre los módulos de interface de operador 20-HIM.
Pautas de cableado y conexión a tierra de equipos de automatización industrial, publicación 1770-4.1
Proporciona pautas generales para instalar un sistema industrial de Rockwell Automation.
Sitio web de certificaciones de productos,http://www.rockwellautomation.com/global/certification/overview.page
Proporciona declaraciones de conformidad, certificados y otros detalles de certificación.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 3

Prefacio
Precauciones generales
ADVERTENCIA: • Solo el personal familiarizado con el controlador y la maquinaria asociada debe planificar y llevar a cabo la instalación, la puesta en marcha y el
subsiguiente mantenimiento del sistema. De lo contrario, existe el riesgo de alguien sufra lesiones personales y/o se ocasionen daños al equipo.
• Hay voltaje peligroso presente en el circuito del motor aunque el controlador SMC-50 esté apagado. Para evitar el peligro de choque, desconecte la alimentación principal antes de comenzar a trabajar en el controlador, en el motor o en los dispositivos de control, tales como botones de arranque-paro. Los procedimientos que requieren que partes del equipo estén activadas durante la resolución de problemas, pruebas etc., deben ser realizados por personal calificado, mediante prácticas de trabajo seguras para la localidad y bajo medidas de precaución.
• El fallo de los componentes de conmutación de alimentación de estado sólido puede provocar sobrecalentamiento debido a una condición en una de las fases del motor. Para evitar lesiones o daños al equipo, se recomienda el uso de un contactor de aislamiento o de disyuntor tipo bobina de disparo en el lado de línea del controlador SMC. Este dispositivo debe ser capaz de interrumpir la corriente de rotor bloqueado del motor.
• Los voltajes peligrosos que pueden producir choques, quemaduras o la muerte están presentes en L1, L2, L3, T1, T2 y T3. En el caso de unidades de derivación, los voltajes peligrosos también están presentes en T4, T5 y T6. Las cubiertas de terminales para unidades con clasificación 90…180 A (estado sólido) y 108…480 A (derivación integrada) se pueden instalar para evitar el contacto accidental con los terminales. Desconecte la alimentación principal antes de dar servicio al controlador de motor o al cableado asociado.
ATENCIÓN:
• Se requieren las precauciones de control de electricidad estática al instalar, probar, dar servicio o reparar el ensamblaje. El controlador tiene piezas y ensamblajes sensibles a descargas electrostáticas (ESD). Si no se siguen los procedimientos de control de electricidad estática, los componentes podrían sufrir daños. Si no está familiarizado con los procedimientos de control de electricidad estática consulte los manuales pertinentes sobre protección contra descargas electrostáticas.
• Los modos de paro, tales como el frenado, no se deben usar como paro de emergencia. Usted es responsable de determinar cuál modo de paro es el más apto para la aplicación. Consulte los estándares aplicables para obtener información sobre los requisitos de paro de emergencia.
• Los modos de paro de bomba y de desaceleración lineal pueden producir calentamiento del motor. Según la dinámica mecánica del sistema, seleccione el ajuste de tiempo de paro más bajo que pare de forma satisfactoria el motor.
• El funcionamiento en baja velocidad no se debe usar para la operación continua. Esto es debido al enfriamiento reducido del motor.
• Se pueden conectar dos dispositivos periféricos al puerto de interface de programación directa (DPI™) ubicado en el módulo de control. La corriente de salida máxima a través del puerto DPI es 560 mA. NOTA: Un módulo de interface de operador (HIM) ubicado en el puerto/bisel del HIM de módulo de control (vea Figura 9) también consume alimentación del puerto DPI.
• Desconecte el controlador de la fuente de alimentación eléctrica al instalar o inspeccionar los módulos de protección o de condensador. Estos módulos se deben inspeccionar periódicamente en busca de daños o decoloración. Reemplace el módulo si ha sido dañado o si el sellante transparente o los componentes presentan decoloración.
• Podrían requerirse consideraciones adicionales para cumplir con la norma EMC. Vea el documento SMC-50 Controller User Manual, publicación 150-UM011.
4 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
Prefacio
Material de perclorato; se puede requerir manejo especial. Visite www.dtsc.ca.gov/hazardouswaste/perchlorate.
Esta advertencia de perclorato solo se aplica a celdas o baterías primarias de dióxido de manganeso y litio (LiMnO2) y productos que contengan estas celdas o baterías, vendidos o distribuidos en el estado de California, EE. UU.
Resumen de cambios Este manual contiene nueva información sobre el controlador SMC-50 con la opción de derivación interna. También actualiza y corrige información de revisiones anteriores.
ATENCIÓN:
• El controlador se debe aplicar e instalar correctamente. Si se aplica o se instala incorrectamente el controlador, pueden producirse daños a los componentes o una reducción de la vida útil del producto. El sistema podría presentar un mal funcionamiento si se producen los siguientes errores de cableado o aplicación: dimensionamiento insuficiente del motor, uso de un controlador mal dimensionado, uso de una fuente de alimentación eléctrica de CA incorrecta o inadecuada, temperatura ambiente excesiva o mala calidad de alimentación.
• Debe programar los parámetros de sobrecarga de motor para proporcionar la protección adecuada. La configuración de sobrecarga se debe coordinar adecuadamente con el motor.
• Este producto ha sido diseñado y probado como equipo de Clase A para su compatibilidad electromagnética (EMC). El uso de este producto en ambientes residenciales puede causar interferencia de radio, en cuyo caso el instalador podría necesitar emplear métodos de mitigación adicionales.
• Desconecte el controlador del motor antes de medir la resistencia de aislamiento (IR) de los bobinados del motor. Los voltajes usados para las pruebas de resistencia del aislamiento pueden causar fallo del rectificador controlado de silicio (SCR). No realice mediciones del controlador usando un probador de resistencia de aislamiento (IR) o un megóhmetro.
• Para proteger el controlador inteligente de motores (SMC) y el motor frente a sobretensiones, se pueden colocar los módulos protectores en el lado de línea, en el lado de carga o en ambos lados del controlador SMC. No coloque los módulos protectores en el lado de carga del controlador SMC al usar una conexión de motor dentro del triángulo o con el control de bomba, de desaceleración lineal o de frenado.
• El controlador puede instalarse en un sistema con condensadores de corrección del factor de potencia (PFCC). Los PFCC se deben usar solo en el lado de línea del controlador SMC. La instalación de los PFCC en el lado de carga resulta en daños y fallos de los SCR.
• La función de detección de fallo a tierra del controlador SMC-50 está concebida solo para fines de monitoreo y no como interruptor de circuito de fallo a tierra para la protección del personal según se define en el Artículo 100 del NEC. La función de detección de fallo a tierra no ha sido evaluada según UL 1053.
• Tras producirse un cortocircuito, usted deberá verificar la funcionalidad del dispositivo.
Este producto contiene una batería de litio sellada y puede ser necesario reemplazarla durante la vida útil del producto.Al final de su vida útil, la batería de este producto se debe recolectar separadamente de residuos urbanos sin clasificar.La recolecta y el reciclaje de las baterías ayudan a proteger el medio ambiente y contribuyen a la conservación de recursos naturales debido a la recuperación de materiales valiosos.
ATENCIÓN: Existe peligro de explosión si la batería de litio o el módulo del reloj en tiempo real se reemplazan incorrectamente. No reemplace la batería o el módulo del reloj en tiempo real a menos que se haya desconectado la alimentación y se haya determinado que la zona no es peligrosa.Reemplace la batería solo con una batería tipo botón CR2032 equivalente.No elimine la batería de litio o el módulo de reloj en tiempo real en el fuego o en un incinerador. Elimine las baterías usadas de acuerdo a los reglamentos locales.Para obtener información de seguridad sobre la manipulación de las baterías de litio, incluida la manipulación y eliminación de baterías con fugas, consulte el documento Pautas para el tratamiento de baterías de litio, publicación AG 5-4.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 5

Prefacio
Notas:
6 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Capítulo 1
Instalación
Envolventes El diseño estilo abierto del controlador SMC-50 requiere que se instale en un envolvente.
Tabla 1 – Requisitos del envolvente del controlador SMC-50
Las pautas en la Tabla 2 resultan del diseño abierto del controlador SMC-50 y los requisitos de espacio libre mínimo de 150 mm (6 pulg.) por encima y por debajo del controlador.
Tabla 2 – Tamaño de envolvente mínimo del controlador SMC-50
IMPORTANTE La temperatura ambiente (aire libre) o la temperatura interna del envolvente sin reducción del régimen nominal se debe mantener dentro de un rango específico. Vea Tabla 1.
Capacidades nominales de envolventesClasificación de dispositivo estándar: IP00 (tipo abierto NEMA)Envolvente requerido mínimo: IP23 (tipo 1 NEMA)Envolvente recomendado:(1)
(1) Vea la Tabla 2 para obtener el tamaño de envolvente mínimo
IP54 (tipo 12 NEMA)Rango de temperatura ambiente (aire libre) o rango de temperatura interna del envolvente sin reducción del régimen nominal:
Derivación interna -20…+50 °C (-4…+122 °F)
Estado sólido -20…+40 ºC (-4…+104 °F)
Orientación y espacio libreOrientación de montaje: Vertical SOLAMENTE
Espacio libre mínimo:Horizontal 0 cm (0 pulg.)Vertical 15 cm (6 pulg.)
Controlador SMC-50 con derivación interna
Número de catálogomm (pulg.)(1)
(1) El tamaño de envolvente real se cambia según la disipación de calor, el ciclo de servicio, la temperatura ambiente y el enfriamiento externo. Vea el manual del usuario, publicación 150-UM011, para obtener más información.
Ancho Altura Profundidad150-S108…/150-S135… 609.6 (24.0) 762.0 (30.0) 304.8 (12.0)150-S201…/150-S251… 762.0 (30.0) 965.2 (38.0) 355.6 (14.0)
150-S317…/150-S361…/150-S480… 914.4 (36.0) 1295.4 (51.0) 355.6 (14.0)Controlador SMC-50 de estado sólido
Número de catálogo Configuraciónmm (pulg.)(1)
Ancho Altura Profundidad
150-SB…Línea/estrella 609.6 (24.0) 762.0 (30.0) 304.8 (12.0)
Dentro del triángulo 762.0 (30.0) 965.2 (38.0) 355.6 (14.0)150-SC… Todos 762.0 (30.0) 965.2 (38.0) 355.6 (14.0)150-SD… Todos 914.4 (36.0) 1295.4 (51.0) 355.6 (14.0)
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 7

Capítulo 1 Instalación
Requisitos de montaje Todas las unidades se enfrían por ventiladores. Es importante colocar el controlador en una posición que permita la circulación de aire vertical a través del módulo de alimentación.
Vea la Tabla 2 para obtener las dimensiones de envolvente mínimas.
Al realizar la instalación o taladrar cerca del arrancador suave, asegúrese de tomar las medidas adecuadas para proteger el dispositivo contra polvo y materias residuales, según se muestra en la Figura 1.
Figura 1 – Protección de montaje del controlador SMC-50
IMPORTANTE El controlador se debe montar en un plano vertical para tener un mínimo de 6 pulg. (150 mm) de espacio libre por encima y por debajo del controlador. No se permite el montaje horizontal del controlador SMC-50. El envolvente debe dimensionarse de manera que la temperatura interna del envolvente permanezca dentro de las clasificaciones del controlador especificadas.
8 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
Instalación Capítulo 1
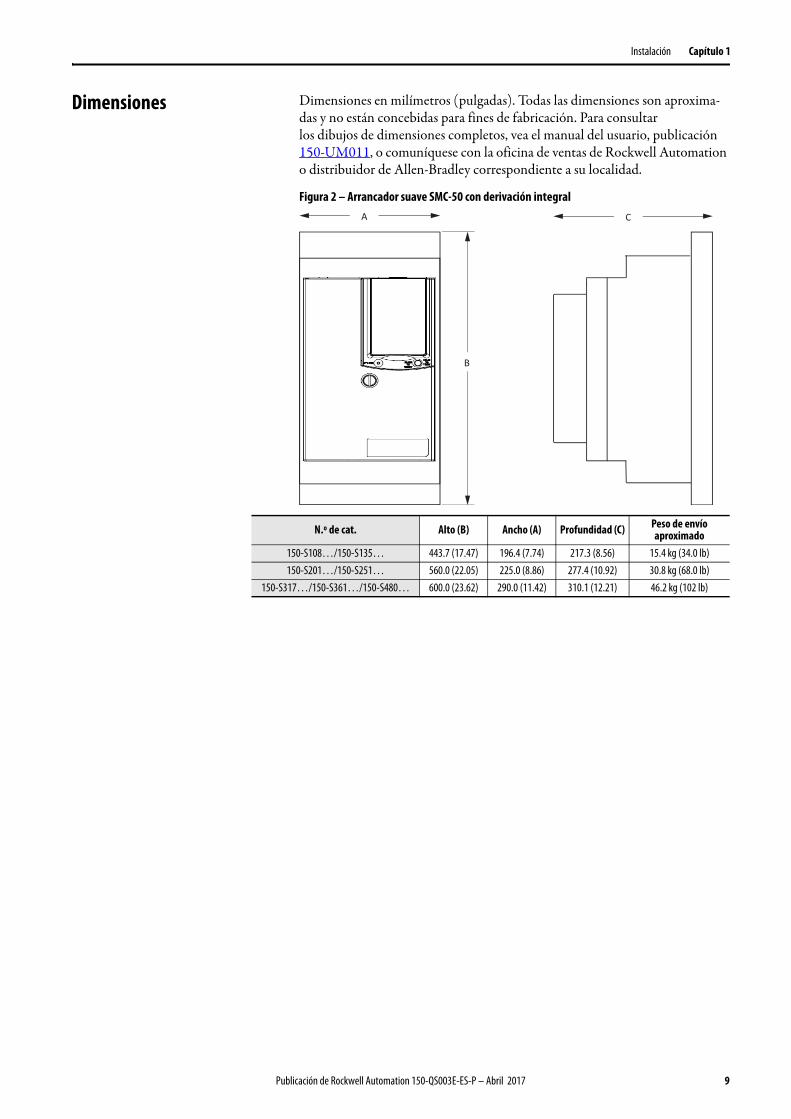
Dimensiones Dimensiones en milímetros (pulgadas). Todas las dimensiones son aproxima-das y no están concebidas para fines de fabricación. Para consultar los dibujos de dimensiones completos, vea el manual del usuario, publicación 150-UM011, o comuníquese con la oficina de ventas de Rockwell Automation o distribuidor de Allen-Bradley correspondiente a su localidad.
Figura 2 – Arrancador suave SMC-50 con derivación integralA
B
N.º de cat. Alto (B) Ancho (A) Profundidad (C) Peso de envío aproximado
150-S108…/150-S135… 443.7 (17.47) 196.4 (7.74) 217.3 (8.56) 15.4 kg (34.0 lb)150-S201…/150-S251… 560.0 (22.05) 225.0 (8.86) 277.4 (10.92) 30.8 kg (68.0 lb)
150-S317…/150-S361…/150-S480… 600.0 (23.62) 290.0 (11.42) 310.1 (12.21) 46.2 kg (102 lb)
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 9
Capítulo 1 Instalación
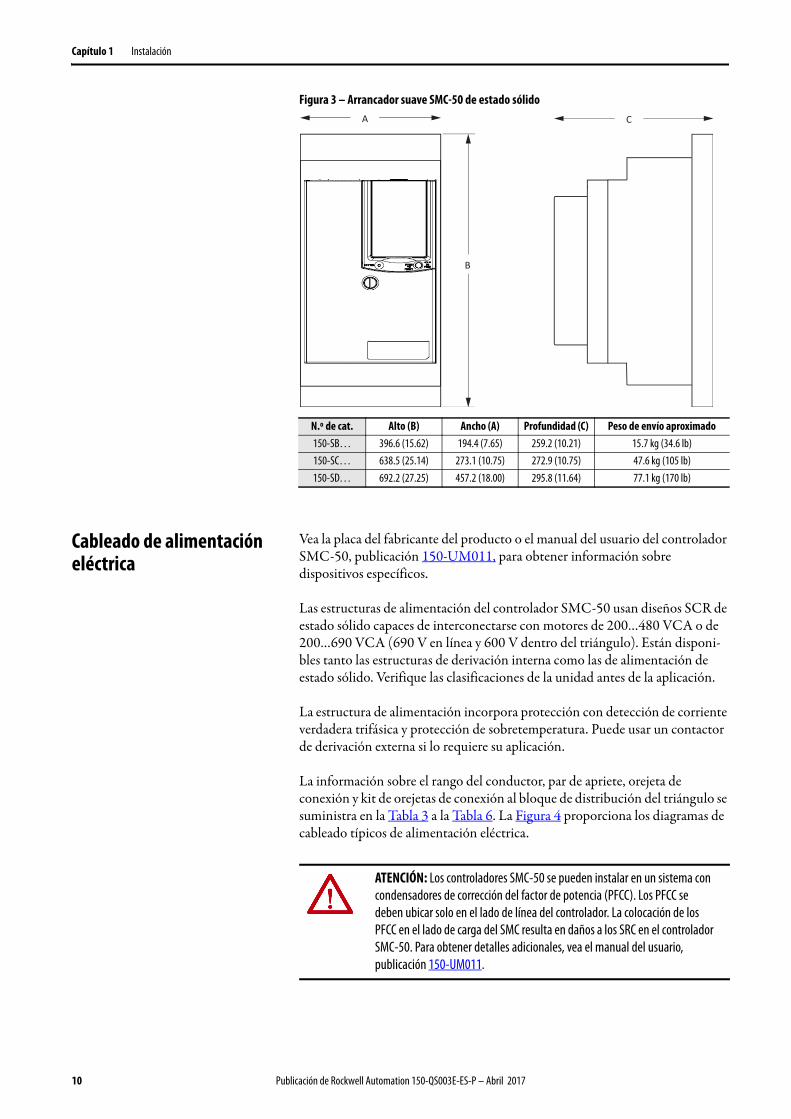
Figura 3 – Arrancador suave SMC-50 de estado sólido
Cableado de alimentación eléctrica
Vea la placa del fabricante del producto o el manual del usuario del controlador SMC-50, publicación 150-UM011, para obtener información sobre dispositivos específicos.
Las estructuras de alimentación del controlador SMC-50 usan diseños SCR de estado sólido capaces de interconectarse con motores de 200…480 VCA o de 200…690 VCA (690 V en línea y 600 V dentro del triángulo). Están disponi-bles tanto las estructuras de derivación interna como las de alimentación de estado sólido. Verifique las clasificaciones de la unidad antes de la aplicación.
La estructura de alimentación incorpora protección con detección de corriente verdadera trifásica y protección de sobretemperatura. Puede usar un contactor de derivación externa si lo requiere su aplicación.
La información sobre el rango del conductor, par de apriete, orejeta de conexión y kit de orejetas de conexión al bloque de distribución del triángulo se suministra en la Tabla 3 a la Tabla 6. La Figura 4 proporciona los diagramas de cableado típicos de alimentación eléctrica.
A
B
N.º de cat. Alto (B) Ancho (A) Profundidad (C) Peso de envío aproximado 150-SB… 396.6 (15.62) 194.4 (7.65) 259.2 (10.21) 15.7 kg (34.6 lb)150-SC… 638.5 (25.14) 273.1 (10.75) 272.9 (10.75) 47.6 kg (105 lb)150-SD… 692.2 (27.25) 457.2 (18.00) 295.8 (11.64) 77.1 kg (170 lb)
ATENCIÓN: Los controladores SMC-50 se pueden instalar en un sistema con condensadores de corrección del factor de potencia (PFCC). Los PFCC se deben ubicar solo en el lado de línea del controlador. La colocación de los PFCC en el lado de carga del SMC resulta en daños a los SRC en el controlador SMC-50. Para obtener detalles adicionales, vea el manual del usuario, publicación 150-UM011.
10 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Instalación Capítulo 1
Orejetas de alimentación Las orejetas de alimentación se requieren para dispositivos con clasificación de 108…480 A (derivación interna) y 90…520 A (estado sólido). Estas orejetas se venden en juegos. Cada juego contiene tres orejetas. El número y el tipo de orejetas requeridos se listas de la Tabla 3 a la Tabla 6.
Tabla 3 – Información sobre orejetas de conexión de dispositivos de derivación integrada SMC-50 para motores conectados en línea/estrella
Tabla 4 – Información sobre orejetas de conexión de dispositivos de derivación integrada SMC-50 para motores conectados dentro del triángulo
Tabla 5 – Información sobre cableado de alimentación del controlador SMC-50 de estado sólido, configuraciones en línea/estrella y dentro-del-triángulo
Tabla 6 – Información sobre cableado del bloque de distribución en triángulo SMC-50 de estado sólido
N.º de cat.Capacidad
nominal [A]
Kit de orejetas
de conexión
n.º de cat.
Longitud de cable a pelar
[mm]Rango de
conductores
N.º máx. orejetas de conexión/polo Par de apriete
Lado de línea
Lado de carga
Cable – orejeta de conexión
Orejeta de conexión – barra
de bus
150-S108…, 150-S135… 108…135 199-LF1 18…20 16…120 mm2
(#6…250 MCM) 1 1 31 N•m (275 lb•pulg.)
17 N•m 150 lb•pulg.
150-S201…, 150-S251… 201…251 199-LF1 18…20 16…120 mm2
(#6…250 MCM) 2 2 31 N•m (275 lb•pulg.)
23 N•m (200 lb•pulg.)
150-S317…, 150-S361…, 150-S480… 317…480 199-LG1 18…25 25…240 mm2
(#4…500 MCM) 2 2 42 N•m (375 lb•pulg.)
28 N•m (250 lb•pulg.)
N.º de cat. Capacidad nominal [A]
Kit de orejetas de
conexión n.º de cat.
Rango de conductores
N.º máx. orejetas de conexión/polo Par de apriete
Lado de línea Cable – orejeta de conexión
Orejeta de conexión – barra
de bus
150-S108…, 150-S135… 187…234 1494R-N15 25…240 mm2
(#4…500 MCM) 1 42 N•m (375 lb•pulg.)
17 N•m 150 lb•pulg.
150-S201…, 150-S251… 348…435 1494R-N14 50…120 mm2
(1/0…250 MCM) 2 31 N•m (275 lb•pulg.)
23 N•m (200 lb•pulg.)
150-S317…, 150-S361…, 150-S480… 549…831 150-LG5MC 95…240 mm2
(3/0…500 MCM) 1 34 N•m (300 lb•pulg.)
28 N•m (250 lb•pulg.)
N.º de cat. Capacidad nominal [A]
Kit de orejetas de
conexión n.º de cat.
Longitud de cable a pelar
[mm]Rango de conductores
N.º máx. orejetas de conexión/polo Par de apriete
Lado de línea
Lado de carga
Cable – orejeta de conexión
Orejeta de conexión –
barra de bus
150-SB…90…180
(línea/estrella)155…311 (delta)
199-LF1 18…20 16…120 mm2
(#6…250 MCM) 1 1 31 N•m (275 lb•pulg.)
23 N•m (200 lb•pulg.)
150-SC…210…320
(línea/estrella)363…554 (delta)
199-LF1 18…20 16…120 mm2
(#6…250 MCM) 2 2 31 N•m (275 lb•pulg.)
23 N•m (200 lb•pulg.)
150-SD…361…520
(línea/estrella)625…900 (delta)
199-LG1 18…25 25…240 mm2
(#4…500 MCM) 2 2 42 N•m (375 lb•pulg.)
28 N•m (250 lb•pulg.)
N.º de cat.Par de apriete
CantidadRango de conductores Longitud de cable a pelar [mm] Kit de orejetas de
conexión n.º de cat.Línea Carga Línea Carga Línea Carga
150-SB… 42 N•m (375 lb•pulg.) 3 25…240 mm2
(#4…500 MCM) 35 35 Allen-Bradley 1492-BG
150-SC… 67.8 N•m (600 lb•pulg.)
31 N•m (275 lb•pulg.) 1 54…400 mm2
(1/0…750 MCM)16…120 mm2
(#6…250 MCM) 45 Fila superior = 23Fila inferior = 48
Productos especiales Marathon 1353703
150-SD… 67.8 N•m (600 lb•pulg.)
67.8 N•m (600 lb•pulg.) 3 54…400 mm2
(1/0…750 MCM)54…400 mm2
(1/0…750 MCM) 45 45 Productos especiales Marathon 1352702
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 11

Capítulo 1 Instalación
Diagramas de alimentación típicos
Figura 4 – Diagramas de cableado de alimentación
(1) La clasificación nominal del contactor debe estar de acuerdo con los valores de Hp/kW y FLA del motor.(2) En aplicaciones para Norteamérica, dimensione el contactor según el valor de Hp y FLA del motor. En el caso de aplicaciones IEC,
dimensione el contactor según la clasificación AC-1 o AC-3 del motor. La clasificación de cortocircuito del contactor debe ser similar a la del SMC-50.
T1 T2 T3
K1
L1 L2 L3
K1
L1 L2 L3
T4T5
L1 L2 L3
K1
T1 T2 T3T4 T5T6
L1 L2 L3
1 3 5
2 4 6
1 3 5
2 4 6W1U1
1 3 5
L1 L2 L3
1 3 5
2 4 61 3 5
2 4 6K1
W2
U2
V2
L1 L2 L3
1 3 5
1 3 52 4 6
2 4 6
1 3 5
4V
6W
2U
K1
V1
2 4 6W1U1 V1
2 4 6
W U V
K1
1 3 5
2 2 2
T1 T2 T3
T6
Diagramas por simbología NEMA
Controlador de estado sólido SMC-50
Controlador SMC-50 con derivación interna
Controlador de estado sólido SMC-50
Controlador SMC-50 con derivación interna
Diagramas por simbología IEC
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Conexión de línea con contactor de aislamiento (modo predeterminado)
Conexión de línea con contactor de aislamiento (modo predeterminado)
Conexión dentro del triángulo con contactor de aislamiento
(modo opcional)
Conexión dentro del triángulo con contactor de aislamiento
(modo opcional)
Conexión en triángulo con protección de SCR cortocircuitado
(modo opcional)
Conexión en triángulo con protección de SCR cortocircuitado
(modo opcional)
Motor Motor Motor
3~Motor
3~Motor
3~Motor
(1) (1)
(2)
(1) (1)
(2)
12 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Instalación Capítulo 1
Cableado de control Bloque de terminales de control estándar
Los controladores SMC-50 se envían en su versión estándar con dos entradas digitales de activación/desactivación de 24 VCC y dos salidas de relé para funciones de control auxiliares. El bloque de terminales de cableado de E/S digitales estándar se encuentra en la parte superior derecha del controlador SMC-50. El bloque de terminales es extraíble.
Especificaciones de cableado de control
La tabla siguiente muestra las especificaciones de todos los bloques de terminales de cableado de control y de módulo opcional del controlador SMC-50. Cada terminal de cableado acepta dos cables como máximo.
Tabla 7 – Especificaciones de cableado de control
Calibre de cable 0.2…2.5 mm2 (#24…14 AWG)
Par máximo 0.8 N•m (7 lb•pulg.)
Longitud máx. de cable a pelar 7 mm (0.27 pulg.)
Tipo tornillo M3 con ranura
PELIGRO DE CHOQUE: Para evitar el riesgo de choque eléctrico, desconecte todas las fuentes de alimentación eléctrica del controlador y del módulo opcional antes de instalarlos o darles mantenimiento. Instale el controlador y el módulo opcional en un envolvente adecuado y manténgalos libres de contaminantes.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 13
Capítulo 1 Instalación
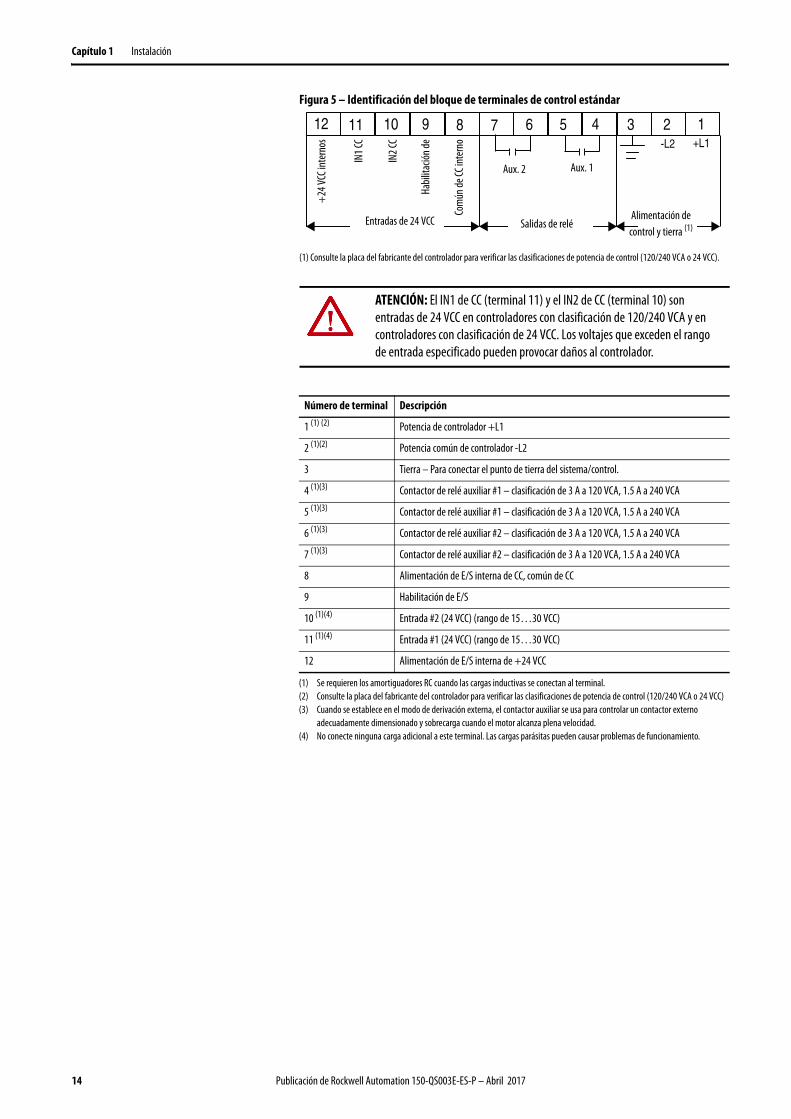
Figura 5 – Identificación del bloque de terminales de control estándar
(1) Consulte la placa del fabricante del controlador para verificar las clasificaciones de potencia de control (120/240 VCA o 24 VCC).
ATENCIÓN: El IN1 de CC (terminal 11) y el IN2 de CC (terminal 10) son entradas de 24 VCC en controladores con clasificación de 120/240 VCA y en controladores con clasificación de 24 VCC. Los voltajes que exceden el rango de entrada especificado pueden provocar daños al controlador.
Número de terminal Descripción
1 (1) (2)
(1) Se requieren los amortiguadores RC cuando las cargas inductivas se conectan al terminal.(2) Consulte la placa del fabricante del controlador para verificar las clasificaciones de potencia de control (120/240 VCA o 24 VCC)
Potencia de controlador +L1
2 (1)(2) Potencia común de controlador -L2
3 Tierra – Para conectar el punto de tierra del sistema/control.
4 (1)(3)
(3) Cuando se establece en el modo de derivación externa, el contactor auxiliar se usa para controlar un contactor externo adecuadamente dimensionado y sobrecarga cuando el motor alcanza plena velocidad.
Contactor de relé auxiliar #1 – clasificación de 3 A a 120 VCA, 1.5 A a 240 VCA
5 (1)(3) Contactor de relé auxiliar #1 – clasificación de 3 A a 120 VCA, 1.5 A a 240 VCA
6 (1)(3) Contactor de relé auxiliar #2 – clasificación de 3 A a 120 VCA, 1.5 A a 240 VCA
7 (1)(3) Contactor de relé auxiliar #2 – clasificación de 3 A a 120 VCA, 1.5 A a 240 VCA
8 Alimentación de E/S interna de CC, común de CC
9 Habilitación de E/S
10 (1)(4)
(4) No conecte ninguna carga adicional a este terminal. Las cargas parásitas pueden causar problemas de funcionamiento.
Entrada #2 (24 VCC) (rango de 15…30 VCC)
11 (1)(4) Entrada #1 (24 VCC) (rango de 15…30 VCC)
12 Alimentación de E/S interna de +24 VCC
-L2 +L1
12 11 10 9 8 7 6 5 4 3 2 1
Entradas de 24 VCC Salidas de reléAlimentación de
control y tierra (1)
+24
VCC i
nter
nos
IN1 C
C
IN2 C
C
Habil
itació
n de
Com
ún de
CC in
tern
o
Aux. 2 Aux. 1
14 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Instalación Capítulo 1
Ejemplos de cableado de control típico
La Figura 6 y la Figura 7 presentan ejemplos de diagramas de cableado de control que usan las E/S estándar del controlador. Para obtener ejemplos adicionales de cableado, vea el manual del usuario del controlador SMC-50, publicación 150-UM011.
Figura 6 – Control de dos cables (sin DPI) con indicación de fallo
(1) Suministrado por el cliente.(2) Consulte la placa del fabricante del controlador para verificar las clasificaciones de entrada de alimentación de control
(120 V/240 VCA o 24 VCC).(3) La entrada de 24 VCC en el terminal 10 (IN2) normalmente abierta (N.A.) se configura para Start/Stop o Start/Coast mediante el
parámetro 57. Al usar Start/Stop o Start/Coast, debe utilizar el contactor N.A.NOTA: El controlador genera un fallo de configuración de E/S si cualquier entrada se configura para START o SLOW y no se configura
ninguna entrada para COAST o STOP. (4) Se requiere un puente suministrado por el cliente para habilitar el funcionamiento de las E/S estándar del controlador.(5) El terminal se debe cablear a la tierra de control para mantener el buen funcionamiento.(6) El contacto de salida Aux2 se configura para Fault mediante el parámetro 176.NOTA: Debido a la fuga de corriente a través de un SCR en el estado desactivado (controlador parado), se recomienda una forma de
aislamiento de alimentación eléctrica en la línea flujo arriba si el motor requiere mantenimiento. Vea el diagrama de cableado típico de la aplicación del contactor de aislamiento en el manual del usuario.
SUGERENCIA Cuando usa el control de dos cables con IN1 y/o IN2 establecidos en Start/Stop o Start/Coast, no puede arrancar el controlador SMC-50 mediante un HIM.Si desea arrancar y parar el motor en modo de prueba mediante un HIM, siga estos pasos:• Establezca IN1 (parámetro 56) e IN2 (parámetro 57) en “Disable”.• Borre el fallo I/O Config, si aparece.• Establezca Logic Mask (parámetro 148) en el bit apropiado según el
puerto de dispositivo que el HIM usa.Ahora el motor debe arrancarse y moverse por inercia mediante comandos HIM.
-L2 +L1
-L2 +L1
-L2 +L1
12 11 10 9 8 7 6 5 4 3 2 1
+24
VCC i
nter
nos
IN1 C
C
IN2 C
C
Habil
itació
n de E
/S
Com
ún de
volta
jes CC
inte
rnos
Aux. 2 Aux. 1
Tierra de control
Alimentación eléctrica de controlStart/Stop
LED de indicación
(3)
(1)
(4)
(1)(6)
(5)
(2)
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 15
Capítulo 1 Instalación
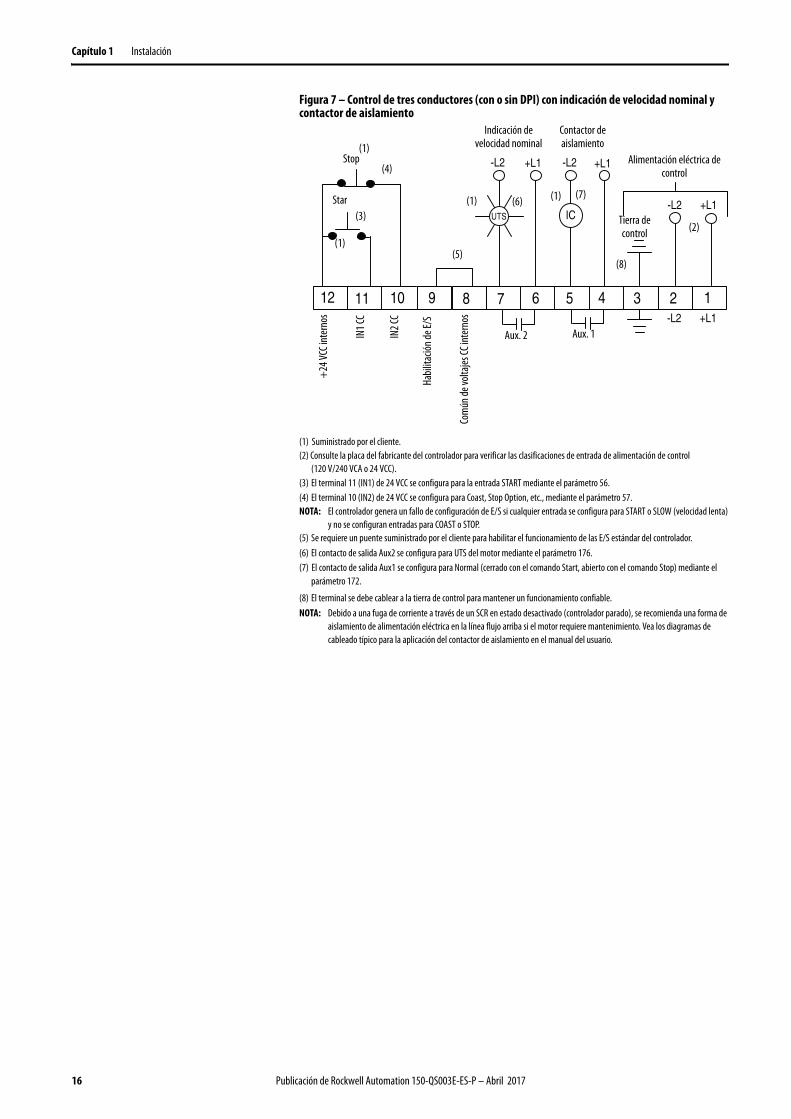
Figura 7 – Control de tres conductores (con o sin DPI) con indicación de velocidad nominal y contactor de aislamiento
(1) Suministrado por el cliente.(2) Consulte la placa del fabricante del controlador para verificar las clasificaciones de entrada de alimentación de control
(120 V/240 VCA o 24 VCC).(3) El terminal 11 (IN1) de 24 VCC se configura para la entrada START mediante el parámetro 56.(4) El terminal 10 (IN2) de 24 VCC se configura para Coast, Stop Option, etc., mediante el parámetro 57. NOTA: El controlador genera un fallo de configuración de E/S si cualquier entrada se configura para START o SLOW (velocidad lenta)
y no se configuran entradas para COAST o STOP. (5) Se requiere un puente suministrado por el cliente para habilitar el funcionamiento de las E/S estándar del controlador.(6) El contacto de salida Aux2 se configura para UTS del motor mediante el parámetro 176.(7) El contacto de salida Aux1 se configura para Normal (cerrado con el comando Start, abierto con el comando Stop) mediante el
parámetro 172.
(8) El terminal se debe cablear a la tierra de control para mantener un funcionamiento confiable.NOTA: Debido a una fuga de corriente a través de un SCR en estado desactivado (controlador parado), se recomienda una forma de
aislamiento de alimentación eléctrica en la línea flujo arriba si el motor requiere mantenimiento. Vea los diagramas de cableado típico para la aplicación del contactor de aislamiento en el manual del usuario.
IC-L2 +L1
-L2 +L1
-L2 +L1 +L1-L2
12 11 10 9 8 7 6 5 4 3 2 1
UTS
+24
VCC i
nter
nos
IN1 C
C
IN2 C
C
Habil
itació
n de E
/S
Com
ún de
volta
jes CC
inte
rnos
Aux. 2 Aux. 1
Tierra de control
Alimentación eléctrica de control
(3)
(1)
(4)
(6)
(5)
(2)
(1)
(1) (1) (7)
(8)
Stop
Star
Indicación de velocidad nominal
Contactor de aislamiento
16 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Instalación Capítulo 1
Cableado del ventilador Los ventiladores de los controladores SMC-50 se deben cablear de acuerdo a las instrucciones de esta sección.
Unidades de derivación integrada
En el caso de unidades con derivación integrada, los ventiladores se deben cablear según se muestra en la Figura 8.
Figura 8 – Cableado del ventilador – Unidades de derivación integrada
Unidades de estado sólido
Las unidades de estado sólido no requieren cableado adicional. Los ventiladores se conectan internamente.
Unidades actualizadas
En el caso de actualizaciones de control del controlador SMC Flex al controlador SMC-50, los ventiladores permanecen conectados tal como lo estaban en el controlador SMC Flex. No es necesario cambiar el cableado.
Módulos de opción Los controladores SMC-50 tienen tres puertos de expansión. Estos puertos permiten añadir módulos opcionales (entradas y salidas adicionales [E/S], capacidad de configuración de parámetros de arranque/paro simples, fallo a tierra, etc.).
• Nota: los módulos de comunicación 20-COMM-X solo pueden residir en el puerto 9.
1
4
3
2
~1
4
3
2
~
—
+
120 VCA (configurado en fábrica) 240 VCA (opcional)
24 VCC
120 VCA, 1 fase
240 VCA, 1 fase
24 VCC
Con el uso del módulo 150-SCMD (control de 120…240 VCA)
Con el uso del módulo 150-SCMR(Control de 24 VCC)
Con el uso del módulo 150-SCMD (control de 120…240 VCA)
ATENCIÓN: Existe la posibilidad de tener valores de voltaje por encima de 220 VCA en los módulos opcionales. Antes de extraer la cubierta del módulo de control para acceder a los módulos opcionales, desconecte TODA la alimentación del controlador SMC-50. No extraiga ni añada módulos opcionales con la alimentación activada.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 17

Capítulo 1 Instalación
Figura 9 – Identificación del número de puerto
Tabla 8 – Ubicación de puerto para módulos opcionales compatibles
Puerto 7
Puerto 8
Puerto 9
Bisel de HIM
Puerto de HIM
Módulo de control SMC-50 (mostrado sin cubierta)Puerto 4
Módulo opcional
n.º de cat.Nombre del módulo Descripción
Puerto de módulo de control compatible
Máx. N.º de este tipo de
módulo opcional por módulo de
controlPuerto 7 Puerto 8 Puerto 9
150-SM2 PTC, fallo a tierra(1) e interface de transformador de corriente
• Conectividad a sensores PTC del motor• Conectividad a sensores de fallo a tierra externos(2) • Conectividad a sensores de corriente externos(2)
Sí Sí No 1
150-SM3 E/S analógicas • 2 entradas analógicas• 2 salidas analógicas Sí Sí Sí 3
150-SM4 E/S digitales • 4 entradas digitales• 3 salidas de relé Sí Sí Sí 3
150-SM6 Módulo de configuración de parámetros• Tres juegos de microinterruptores de 8 posiciones y
cinco juegos de interruptores giratorios de 16 posiciones para uso con programación simple.
Sí Sí Sí 1
20-COMM-X(3)(4) Módulos de comunicación • Están disponibles varios módulos de comunicación No No Sí 1
20-HIM-A6 Teclado numérico completo mejorado con pantalla LCD
• Se puede instalar en el módulo de control en el bisel/base (puerto 1 DPI) o se puede conectar mediante un cable al puerto 2 DPI.
– – – 1(5)
20-HIM-C6S Teclado numérico completo remoto (montaje en panel) con pantalla LCD
• Normalmente se monta en puerta o en panel y se conecta mediante un cable al puerto 2 DPI. – – – 1(5)
(1) La función de detección de fallo a tierra del controlador SMC-50 está diseñada para fines de monitoreo solamente.(2) Podrían ser necesarios componentes externos. Vea el manual del usuario del controlador SMC-50, publicación 150-UM011, para obtener más información.(3) Vea la guía de selección del controlador SMC-50, publicación 150-SG010, o el manual del usuario del controlador SMC-50, publicación 150-UM011, para obtener una lista de módulos de comunicación
20-COMM-X compatibles.(4) Cuando se instalan en un controlador SMC-50, los módulos 20-COMM-X residen físicamente en el espacio asignado al puerto 9, pero se conectan al puerto 4 DPI mediante un cable plano provisto con
el módulo de comunicación.(5) En la mayoría de los sistemas, se usa un solo dispositivo HIM. Puede usar varios HIM mediante el puerto 2 DPI y un bifurcador de puerto DPI. Vea el manual del usuario del controlador SMC-50,
publicación 150-UM011, para obtener más información.
ATENCIÓN: La función de detección de fallo a tierra del controlador SMC-50 está concebida solo para fines de monitoreo y no como interruptor de circuito de fallo a tierra para la protección del personal según se define en el Artículo 100 del NEC. La función de detección de fallo a tierra no ha sido evaluada según UL 1053.
18 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Instalación Capítulo 1
Operación y diagramas de derivación
La operación de derivación varía entre el controlador SMC-50 con derivación interna y el controlador de estado sólido.
Controladores SMC-50 con derivación interna
Los controladores SMC-50 con derivación interna cuentan con uno o más contactores incorporados que se cierran cuando el motor está en velocidad nominal. Así se reduce el calor, puesto que la corriente de motor ahora pasa a través del contactor o contactores de derivación interna y no a través de los SCR.
Controladores SMC-50 con derivación externa
En el caso de la operación de derivación externa, usted deberá proporcionar un contactor de derivación. El contactor de relé auxiliar programado para derivación externa se usa para controlar un contactor externo debidamente dimensionado una vez que el motor esté funcionando a plena velocidad.
Puede conseguir la protección de sobrecarga de varias maneras. La Tabla 9 proporciona un resumen de las opciones de protección de sobrecarga de motor.
Tabla 9 – Opciones de protección de sobrecarga de motor
Tipo de estructura de alimentación
Número de catálogo
Opción de protección de sobrecarga
150-SM2 y 825-MCM180
150-SM2, 825-MCM20 y CT
externosKit de
derivaciónSobrecarga
externa
Derivación interna
150-S108…X(1)
(1) No disponible para aplicaciones dentro del triángulo.
– – X150-S135…150-S201…
– X(1) – X150-S251…150-S317…
– X(1) – X150-S361…150-S480…
Estado sólido150-SB… X – – X150-SC… – X X X150-SD… – X X X
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 19
Capítulo 1 Instalación
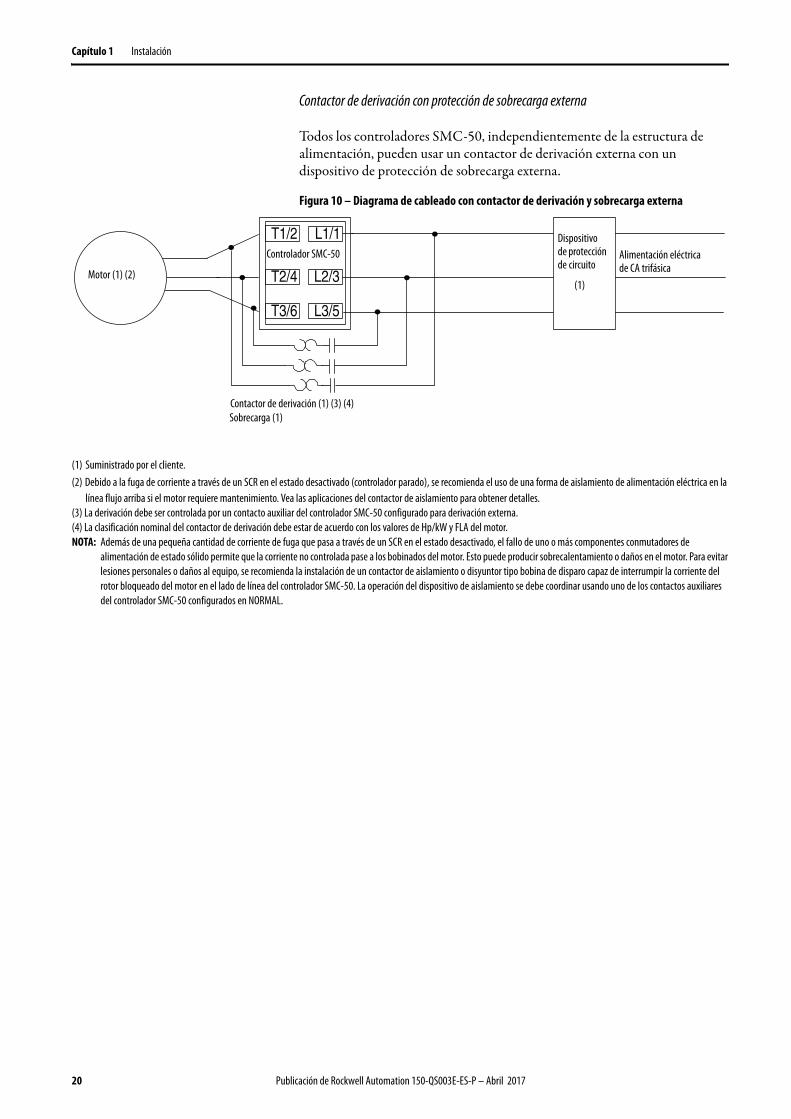
Contactor de derivación con protección de sobrecarga externa
Todos los controladores SMC-50, independientemente de la estructura de alimentación, pueden usar un contactor de derivación externa con un dispositivo de protección de sobrecarga externa.
Figura 10 – Diagrama de cableado con contactor de derivación y sobrecarga externa
(1) Suministrado por el cliente.(2) Debido a la fuga de corriente a través de un SCR en el estado desactivado (controlador parado), se recomienda el uso de una forma de aislamiento de alimentación eléctrica en la
línea flujo arriba si el motor requiere mantenimiento. Vea las aplicaciones del contactor de aislamiento para obtener detalles.(3) La derivación debe ser controlada por un contacto auxiliar del controlador SMC-50 configurado para derivación externa.(4) La clasificación nominal del contactor de derivación debe estar de acuerdo con los valores de Hp/kW y FLA del motor.NOTA: Además de una pequeña cantidad de corriente de fuga que pasa a través de un SCR en el estado desactivado, el fallo de uno o más componentes conmutadores de
alimentación de estado sólido permite que la corriente no controlada pase a los bobinados del motor. Esto puede producir sobrecalentamiento o daños en el motor. Para evitar lesiones personales o daños al equipo, se recomienda la instalación de un contactor de aislamiento o disyuntor tipo bobina de disparo capaz de interrumpir la corriente del rotor bloqueado del motor en el lado de línea del controlador SMC-50. La operación del dispositivo de aislamiento se debe coordinar usando uno de los contactos auxiliares del controlador SMC-50 configurados en NORMAL.
T1/2
T2/4
T3/6
L1/1
L2/3
L3/5
Motor (1) (2)
Dispositivo de protección de circuito
Alimentación eléctrica de CA trifásica
Contactor de derivación (1) (3) (4)
(1)
Controlador SMC-50
Sobrecarga (1)
20 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
Instalación Capítulo 1
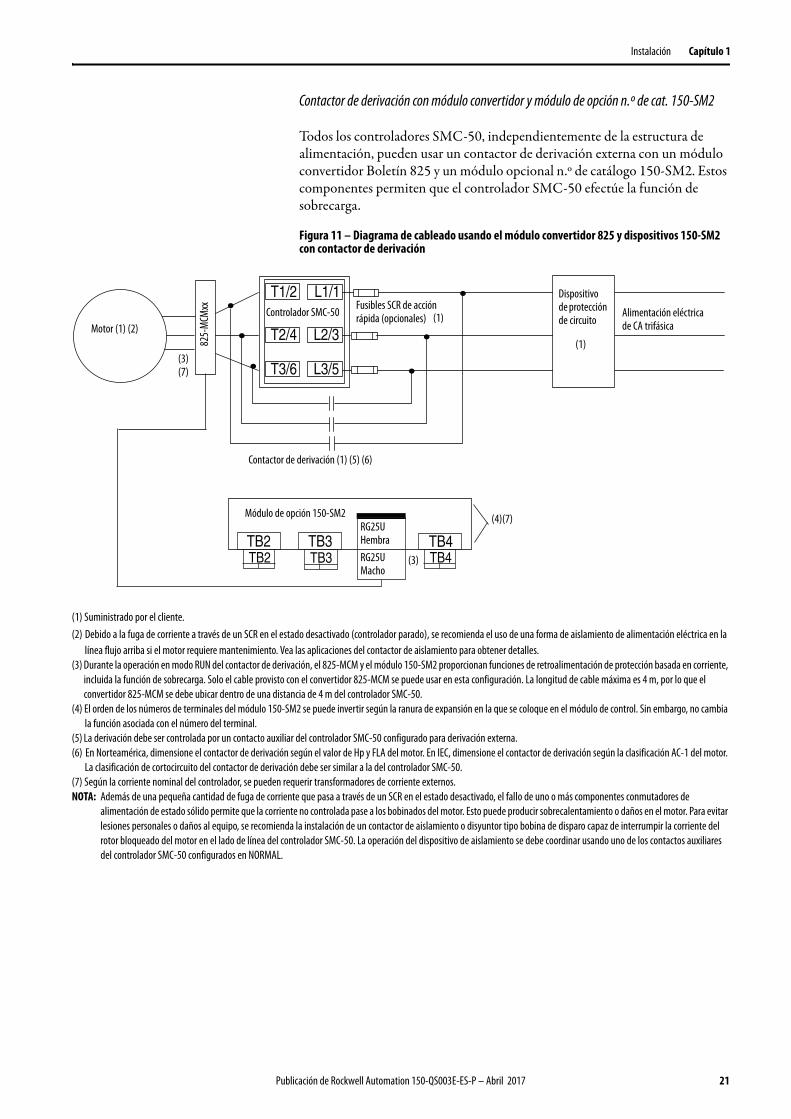
Contactor de derivación con módulo convertidor y módulo de opción n.º de cat. 150-SM2
Todos los controladores SMC-50, independientemente de la estructura de alimentación, pueden usar un contactor de derivación externa con un módulo convertidor Boletín 825 y un módulo opcional n.º de catálogo 150-SM2. Estos componentes permiten que el controlador SMC-50 efectúe la función de sobrecarga.
Figura 11 – Diagrama de cableado usando el módulo convertidor 825 y dispositivos 150-SM2 con contactor de derivación
(1) Suministrado por el cliente.(2) Debido a la fuga de corriente a través de un SCR en el estado desactivado (controlador parado), se recomienda el uso de una forma de aislamiento de alimentación eléctrica en la
línea flujo arriba si el motor requiere mantenimiento. Vea las aplicaciones del contactor de aislamiento para obtener detalles.(3) Durante la operación en modo RUN del contactor de derivación, el 825-MCM y el módulo 150-SM2 proporcionan funciones de retroalimentación de protección basada en corriente,
incluida la función de sobrecarga. Solo el cable provisto con el convertidor 825-MCM se puede usar en esta configuración. La longitud de cable máxima es 4 m, por lo que el convertidor 825-MCM se debe ubicar dentro de una distancia de 4 m del controlador SMC-50.
(4) El orden de los números de terminales del módulo 150-SM2 se puede invertir según la ranura de expansión en la que se coloque en el módulo de control. Sin embargo, no cambia la función asociada con el número del terminal.
(5) La derivación debe ser controlada por un contacto auxiliar del controlador SMC-50 configurado para derivación externa.(6) En Norteamérica, dimensione el contactor de derivación según el valor de Hp y FLA del motor. En IEC, dimensione el contactor de derivación según la clasificación AC-1 del motor.
La clasificación de cortocircuito del contactor de derivación debe ser similar a la del controlador SMC-50.(7) Según la corriente nominal del controlador, se pueden requerir transformadores de corriente externos.NOTA: Además de una pequeña cantidad de fuga de corriente que pasa a través de un SCR en el estado desactivado, el fallo de uno o más componentes conmutadores de
alimentación de estado sólido permite que la corriente no controlada pase a los bobinados del motor. Esto puede producir sobrecalentamiento o daños en el motor. Para evitar lesiones personales o daños al equipo, se recomienda la instalación de un contactor de aislamiento o disyuntor tipo bobina de disparo capaz de interrumpir la corriente del rotor bloqueado del motor en el lado de línea del controlador SMC-50. La operación del dispositivo de aislamiento se debe coordinar usando uno de los contactos auxiliares del controlador SMC-50 configurados en NORMAL.
T1/2
T2/4
T3/6
L1/1
L2/3
L3/5
TB2TB2 TB3 TB4
TB3 TB4
(3)(7)
Motor (1) (2)
825-
MCM
xx
Contactor de derivación (1) (5) (6)
Módulo de opción 150-SM2 (4)(7)
(3)
(1)
(1)Controlador SMC-50Fusibles SCR de acción rápida (opcionales)
Dispositivo de protección de circuito
Alimentación eléctrica de CA trifásica
RG25UHembraRG25UMacho
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 21
Capítulo 1 Instalación
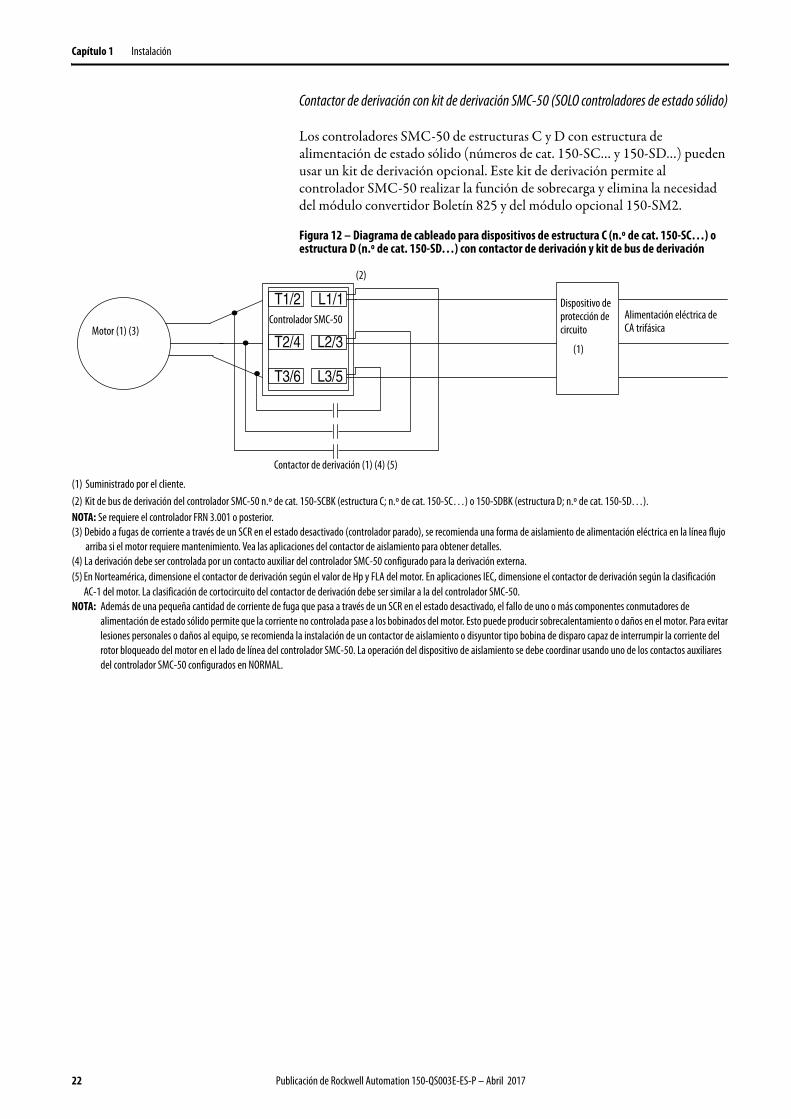
Contactor de derivación con kit de derivación SMC-50 (SOLO controladores de estado sólido)
Los controladores SMC-50 de estructuras C y D con estructura de alimentación de estado sólido (números de cat. 150-SC… y 150-SD…) pueden usar un kit de derivación opcional. Este kit de derivación permite al controlador SMC-50 realizar la función de sobrecarga y elimina la necesidad del módulo convertidor Boletín 825 y del módulo opcional 150-SM2.
Figura 12 – Diagrama de cableado para dispositivos de estructura C (n.º de cat. 150-SC…) o estructura D (n.º de cat. 150-SD…) con contactor de derivación y kit de bus de derivación
(1) Suministrado por el cliente.(2) Kit de bus de derivación del controlador SMC-50 n.º de cat. 150-SCBK (estructura C; n.º de cat. 150-SC…) o 150-SDBK (estructura D; n.º de cat. 150-SD…).NOTA: Se requiere el controlador FRN 3.001 o posterior.(3) Debido a fugas de corriente a través de un SCR en el estado desactivado (controlador parado), se recomienda una forma de aislamiento de alimentación eléctrica en la línea flujo
arriba si el motor requiere mantenimiento. Vea las aplicaciones del contactor de aislamiento para obtener detalles.(4) La derivación debe ser controlada por un contacto auxiliar del controlador SMC-50 configurado para la derivación externa.(5) En Norteamérica, dimensione el contactor de derivación según el valor de Hp y FLA del motor. En aplicaciones IEC, dimensione el contactor de derivación según la clasificación
AC-1 del motor. La clasificación de cortocircuito del contactor de derivación debe ser similar a la del controlador SMC-50.NOTA: Además de una pequeña cantidad de corriente de fuga que pasa a través de un SCR en el estado desactivado, el fallo de uno o más componentes conmutadores de
alimentación de estado sólido permite que la corriente no controlada pase a los bobinados del motor. Esto puede producir sobrecalentamiento o daños en el motor. Para evitar lesiones personales o daños al equipo, se recomienda la instalación de un contactor de aislamiento o disyuntor tipo bobina de disparo capaz de interrumpir la corriente del rotor bloqueado del motor en el lado de línea del controlador SMC-50. La operación del dispositivo de aislamiento se debe coordinar usando uno de los contactos auxiliares del controlador SMC-50 configurados en NORMAL.
T1/2
T2/4
T3/6
L1/1
L2/3
L3/5
Motor (1) (3)
Dispositivo de protección de circuito
Alimentación eléctrica de CA trifásica
Contactor de derivación (1) (4) (5)
(1)
Controlador SMC-50
(2)
22 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
Capítulo 2
Programación
Configuración de parámetros Configuración de parámetros mediante el uso de un módulo 20-HIM-A6 (FRN1.006 o posterior)
Usted puede configurar todos los parámetros del controlador SMC-50 usando el módulo 20-HIM-A6 (NEMA tipo 1) o el módulo 20-HIM-C6S (montaje remoto NEMA tipo 4X/12). El módulo identificado con el n.º de cat. 20-HIM-A6 normalmente se instala en el bisel/puerto HIM ubicado en la parte derecha superior del controlador SMC-50 (vea la Figura 9). Para operación manual temporal, puede conectar el HIM al puerto #2 DPI en la parte superior del módulo de control. Necesitará un cable n.º de cat. 20-HIM-H10 para esta operación temporal.
El texto siguiente describe las funciones básicas de pantalla y teclado del módulo n.º de cat. 20-HIM-A6. Para obtener detalles adicionales sobre la instalación y el uso de los módulos 20-HIM-A6 o 20-HIM-C6S, vea el manual del usuario, publicación 20HIM-UM001.
Teclas de una sola función de HIM
Las cuatro teclas de una sola función solo realizan sus funciones dedicadas independientemente del modo de pantalla o de entrada de datos que se esté usando.
Figura 13 – Teclas de una sola función de HIM
Star Folders Controls Stop
Tecla Función
Start Arranca el controlador si la máscara de lógica del SMC-50 se habilita para el puerto al que está conectado el HIM.(1)
Folders Accede a carpetas para parámetros, diagnóstico, funciones de memoria, preferencias y otras pruebas.
Controls Accede a jog, auto/manual y otras funciones de control.
Stop Para el controlador SMC-50 o borra un fallo. La tecla Stop siempre está activa.
(1) Si el dispositivo (puerto) se habilita y se extrae con la alimentación conectada o si se extrae un dispositivo de expansión, se genera un fallo. La ubicación de bit (tal como 0, 1, 2, etc.) corresponde a los números de puerto DPI.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 23

Capítulo 2 Programación
Acceso a parámetros básicos y estructura de categorías/archivos
Acceso a parámetros
Los parámetros del controlador SMC-50 están estructurados en cinco categorías:
1. Monitoreo
2. Configuración
3. Protección de motor
4. Comunicaciones
5. Utilidades
El módulo n.º de 20-HIM-A6 puede acceder a cualquiera o a todos los parámetros que residen en cualquier categoría. Los ejemplos siguientes muestran cómo acceder a los parámetros del controlador SMC-50 usando el módulo 20-HIM-A6.
Para obtener detalles adicionales sobre estos procedimientos, consulte el manual del usuario del módulo 20-HIM-A6 o 20-HIM-C6S, publicación 20HIM-UM001.
EJEMPLO Para realizar una búsqueda y modificación de número de parámetro, siga este procedimiento.1. y que la pantalla de encendido del HIM del SMC-50 aparezca tal como se muestra:
2. Use la tecla programable PAR# para introducir el número de parámetro que desea mostrar en pantalla; presione ENTER y seguidamente presione EDIT. Aparece la pantalla siguiente.
NOTA: Para acceder al PAR# siguiente o anterior al mostrado en pantalla actualmente, use las teclas programables de flechas hacia arriba/hacia abajo para mostrar en pantalla el parámetro que desea modificar.
3. Presione ENTER para cargar en la memoria el valor cambiado.
AUTOF
09
Stopped 0 Amps
Allen-Bradley
ESC
PORTS00 SMC-5002 20-HIM-x603 1203-USB09 SMC-50 Option
PROPERTIES
AUTOStopped 0 Amps
Allen-Bradley
ESC ENTER
00
SMC-50Jump to Param #
1
24 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Programación Capítulo 2
Estructura de categorías/archivos
Tabla 10 – Estructura de categorías/archivos del controlador SMC-50.
Monitoring Set Up
Volts P-P AveVolts P-N AveCurrent AverageTorqueMotor SpeedPower FactorReal PowerReactive PowerApparent PowerReal EnergyReactive EnergyReactive Energy+Reactive Energy-Apparent EnergyMeter Reset
Metering Basic Basic
Motor ConnectionLine VoltageStarting ModeRamp TimeIntial TorqueCur Limit LevelStop ModeStop TimeInput 1Input 2Aux1 ConfigAux2 ConfigOverload ClassService FactorMotor FLCStarting TorqueMax TorqueRated TorqueRated Speed
Starting
Starting ModeRamp TimeCur Limit LevelInitial TorqueStarting TorqueMax TorqueKickstart Time Kickstart LevelHeating TimeHeating LevelStart Delay
Stopping
Stop ModeStop TimeBraking CurrentBackspin Timer
Slow Speed
Slow Speed 1Slow Speed 2Slow Brake CurSS Ref GainSS Trans Gain
Advanced
Pump PedestalBrake Load TypeHigh Eff BrakeUTS LevelStall PositionStall LevelV Shut Off LevelI Shut Off LevelNotch MaximumTimed StartBypass DelayEnergy SaverDemand PeriodNum of Periods
I/O
Input 1Input 2Aux1 ConfigAux1 InvertAux1 On DelayAux1 Off DelayAux2 ConfigAux2 InvertAux2 On DelayAux2 Off DelayAux Control
Advanced Tuning
Force TuningStator RTotal RCoupling FactorInductanceSpeed GainTransient GainTransient ZeroTransient MagPing DegreePingsPhase Shift 0%Phase Shift 10%Phase Shift 20%Phase Shift 30%Phase Shift 40%Phase Shift 50%Phase Shift 60%Phase Shift 70%Phase Shift 80%Phase Shift 90%Phase Shift 100%
Dual Ramp
Starting Mode 2 Ramp Time 2 Cur Limit Level 2Initial Torque 2 Starting Torque 2Max Torque 2 Kickstart Time 2 Kickstart Level 2
Elapsed TimeElapsed Time 2Running TimeEnergy SavingsMtr Therm UsageTime to OL TripTime to OL ResetTime to PMStarts to PMTotal StartsProduct Status
Monitoring
Start Stats
Start Time 1Start Time 2Start Time 3Start Time 4Start Time 5Peak Current 1Peak Current 2Peak Current 3Peak Current 4Peak Current 5
THD VaTHD VbTHD VcTHD VaveTHD IaTHD IbTHD IcTHD Iave
Power Quality
Volts P-P AveVolts Phase A-BVolts Phase B-CVolts Phase C-AVolts P-N AveVolts Phase A-NVolts Phase B-NVolts Phase C-NVoltage Unbal
Metering Volts
Current AveCurrent Phase ACurrent Phase BCurrent Phase CCurrent Imbal
Metering Current
Real PowerReal Power AReal Power BReal Power CReal DemandMax Real DemandReactive PowerReactive Power AReactive Power BReactive Power CReactive DemandMax Reactive DmdApparent PowerApparent Power AApparent Power BApparent Power CApparent DemandMax Apparent DmdPower FactorPower Factor APower Factor BPower Factor C
Metering Power
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 25
Capítulo 2 Programación
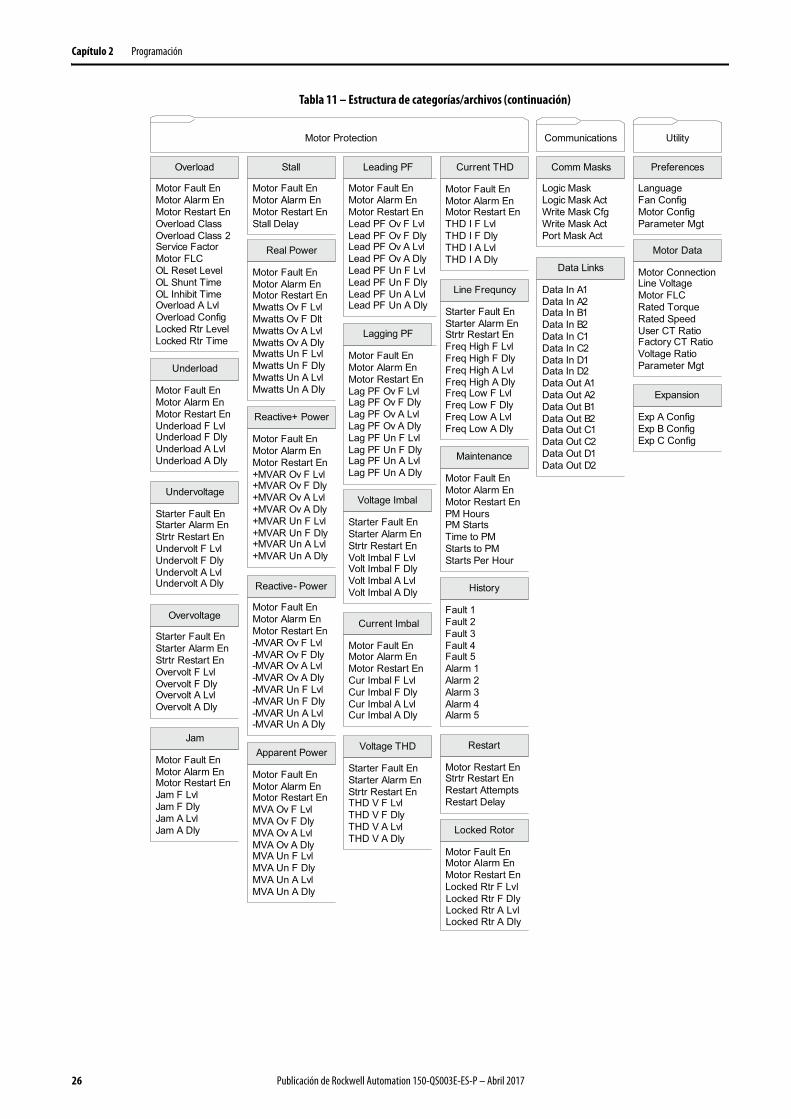
Tabla 11 – Estructura de categorías/archivos (continuación)
Motor Protection
Overload
Underload
Undervoltage
Overvoltage
Voltage Imbal
Jam
Stall
Restart
Motor Fault EnMotor Alarm EnMotor Restart EnOverload ClassOverload Class 2Service FactorMotor FLCOL Reset LevelOL Shunt TimeOL Inhibit TimeOverload A LvlOverload ConfigLocked Rtr LevelLocked Rtr Time
Motor Fault EnMotor Alarm EnMotor Restart EnUnderload F LvlUnderload F DlyUnderload A LvlUnderload A Dly
Starter Fault EnStarter Alarm EnStrtr Restart EnUndervolt F LvlUndervolt F DlyUndervolt A LvlUndervolt A Dly
Starter Fault EnStarter Alarm EnStrtr Restart EnOvervolt F LvlOvervolt F DlyOvervolt A LvlOvervolt A Dly
Starter Fault EnStarter Alarm EnStrtr Restart EnVolt Imbal F LvlVolt Imbal F DlyVolt Imbal A LvlVolt Imbal A Dly
Motor Fault EnMotor Alarm EnMotor Restart EnJam F LvlJam F DlyJam A LvlJam A Dly
Motor Fault EnMotor Alarm EnMotor Restart EnStall Delay
Motor Restart EnStrtr Restart EnRestart AttemptsRestart Delay
Maintenance
Motor Fault EnMotor Alarm EnMotor Restart EnPM HoursPM StartsTime to PMStarts to PMStarts Per Hour
Line Frequncy
Starter Fault EnStarter Alarm EnStrtr Restart EnFreq High F LvlFreq High F DlyFreq High A LvlFreq High A DlyFreq Low F LvlFreq Low F DlyFreq Low A LvlFreq Low A Dly
History
Fault 1Fault 2Fault 3Fault 4Fault 5Alarm 1Alarm 2Alarm 3Alarm 4Alarm 5
Communications
Comm Masks
Data Links
Logic MaskLogic Mask ActWrite Mask CfgWrite Mask ActPort Mask Act
Data In A1Data In A2Data In B1Data In B2Data In C1Data In C2Data In D1Data In D2Data Out A1Data Out A2Data Out B1Data Out B2Data Out C1Data Out C2Data Out D1Data Out D2
Utility
Motor Data
Preferences
LanguageFan ConfigMotor ConfigParameter Mgt
Motor ConnectionLine VoltageMotor FLCRated TorqueRated SpeedUser CT RatioFactory CT RatioVoltage RatioParameter Mgt
Real Power
Motor Fault EnMotor Alarm EnMotor Restart EnMwatts Ov F LvlMwatts Ov F Dlt Mwatts Ov A LvlMwatts Ov A DlyMwatts Un F LvlMwatts Un F DlyMwatts Un A LvlMwatts Un A Dly Expansion
Exp A ConfigExp B ConfigExp C Config
Voltage THD
Starter Fault EnStarter Alarm EnStrtr Restart EnTHD V F LvlTHD V F DlyTHD V A LvlTHD V A Dly
Reactive+ Power
Motor Fault EnMotor Alarm EnMotor Restart En+MVAR Ov F Lvl+MVAR Ov F Dly+MVAR Ov A Lvl+MVAR Ov A Dly+MVAR Un F Lvl+MVAR Un F Dly+MVAR Un A Lvl+MVAR Un A Dly
Current Imbal
Motor Fault EnMotor Alarm EnMotor Restart EnCur Imbal F LvlCur Imbal F DlyCur Imbal A LvlCur Imbal A Dly
Current THD
Motor Fault EnMotor Alarm EnMotor Restart EnTHD I F LvlTHD I F DlyTHD I A LvlTHD I A Dly
Apparent Power
Motor Fault EnMotor Alarm EnMotor Restart EnMVA Ov F LvlMVA Ov F DlyMVA Ov A LvlMVA Ov A DlyMVA Un F LvlMVA Un F DlyMVA Un A LvlMVA Un A Dly
Leading PF
Motor Fault EnMotor Alarm EnMotor Restart EnLead PF Ov F LvlLead PF Ov F DlyLead PF Ov A LvlLead PF Ov A DlyLead PF Un F LvlLead PF Un F DlyLead PF Un A LvlLead PF Un A Dly
Reactive- Power
Motor Fault EnMotor Alarm EnMotor Restart En-MVAR Ov F Lvl-MVAR Ov F Dly-MVAR Ov A Lvl-MVAR Ov A Dly-MVAR Un F Lvl-MVAR Un F Dly-MVAR Un A Lvl-MVAR Un A Dly
Lagging PF
Motor Fault EnMotor Alarm EnMotor Restart EnLag PF Ov F LvlLag PF Ov F DlyLag PF Ov A LvlLag PF Ov A DlyLag PF Un F LvlLag PF Un F DlyLag PF Un A LvlLag PF Un A Dly
Locked Rotor
Motor Fault EnMotor Alarm EnMotor Restart EnLocked Rtr F LvlLocked Rtr F DlyLocked Rtr A LvlLocked Rtr A Dly
26 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
Programación Capítulo 2
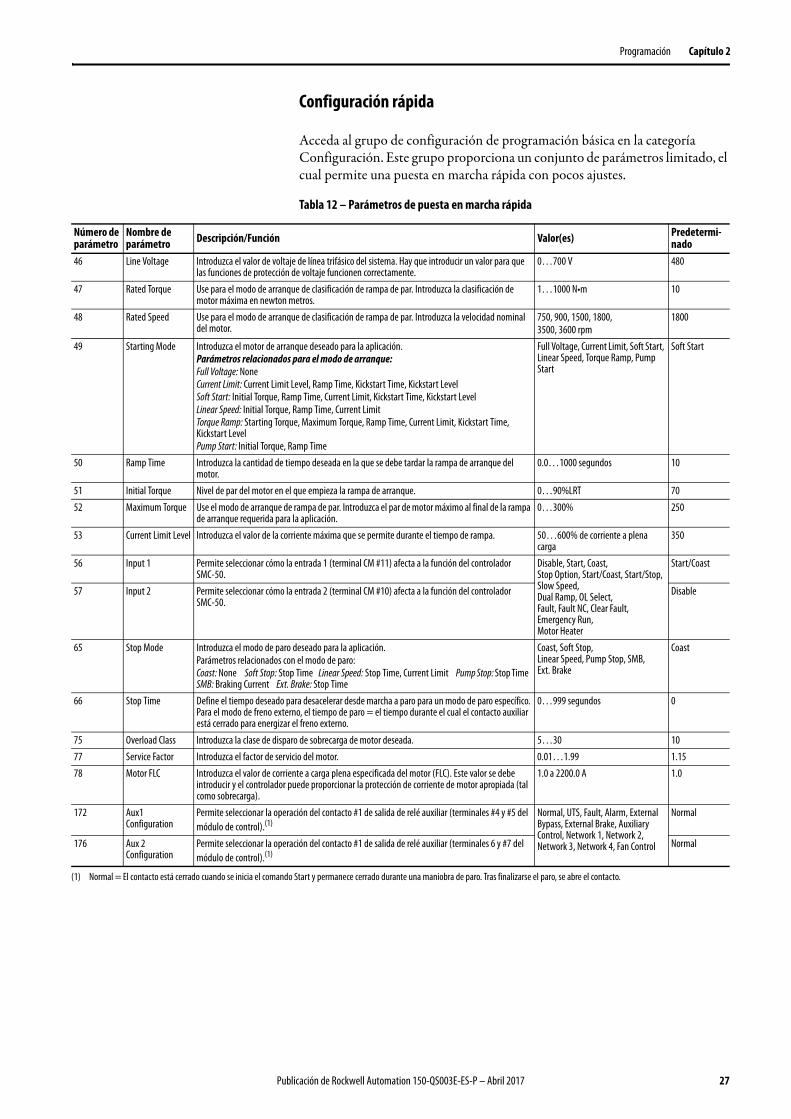
Configuración rápida
Acceda al grupo de configuración de programación básica en la categoría Configuración. Este grupo proporciona un conjunto de parámetros limitado, el cual permite una puesta en marcha rápida con pocos ajustes.
Tabla 12 – Parámetros de puesta en marcha rápida
Número de parámetro
Nombre de parámetro Descripción/Función Valor(es) Predetermi-
nado46 Line Voltage Introduzca el valor de voltaje de línea trifásico del sistema. Hay que introducir un valor para que
las funciones de protección de voltaje funcionen correctamente.0…700 V 480
47 Rated Torque Use para el modo de arranque de clasificación de rampa de par. Introduzca la clasificación de motor máxima en newton metros.
1…1000 N•m 10
48 Rated Speed Use para el modo de arranque de clasificación de rampa de par. Introduzca la velocidad nominal del motor.
750, 900, 1500, 1800, 3500, 3600 rpm
1800
49 Starting Mode Introduzca el motor de arranque deseado para la aplicación.Parámetros relacionados para el modo de arranque:Full Voltage: NoneCurrent Limit: Current Limit Level, Ramp Time, Kickstart Time, Kickstart LevelSoft Start: Initial Torque, Ramp Time, Current Limit, Kickstart Time, Kickstart LevelLinear Speed: Initial Torque, Ramp Time, Current Limit Torque Ramp: Starting Torque, Maximum Torque, Ramp Time, Current Limit, Kickstart Time, Kickstart LevelPump Start: Initial Torque, Ramp Time
Full Voltage, Current Limit, Soft Start, Linear Speed, Torque Ramp, Pump Start
Soft Start
50 Ramp Time Introduzca la cantidad de tiempo deseada en la que se debe tardar la rampa de arranque del motor.
0.0…1000 segundos 10
51 Initial Torque Nivel de par del motor en el que empieza la rampa de arranque. 0…90%LRT 70
52 Maximum Torque Use el modo de arranque de rampa de par. Introduzca el par de motor máximo al final de la rampa de arranque requerida para la aplicación.
0…300% 250
53 Current Limit Level Introduzca el valor de la corriente máxima que se permite durante el tiempo de rampa. 50…600% de corriente a plena carga
350
56 Input 1 Permite seleccionar cómo la entrada 1 (terminal CM #11) afecta a la función del controlador SMC-50.
Disable, Start, Coast, Stop Option, Start/Coast, Start/Stop, Slow Speed, Dual Ramp, OL Select, Fault, Fault NC, Clear Fault, Emergency Run, Motor Heater
Start/Coast
57 Input 2 Permite seleccionar cómo la entrada 2 (terminal CM #10) afecta a la función del controlador SMC-50.
Disable
65 Stop Mode Introduzca el modo de paro deseado para la aplicación.Parámetros relacionados con el modo de paro:Coast: None Soft Stop: Stop Time Linear Speed: Stop Time, Current Limit Pump Stop: Stop Time SMB: Braking Current Ext. Brake: Stop Time
Coast, Soft Stop, Linear Speed, Pump Stop, SMB, Ext. Brake
Coast
66 Stop Time Define el tiempo deseado para desacelerar desde marcha a paro para un modo de paro específico. Para el modo de freno externo, el tiempo de paro = el tiempo durante el cual el contacto auxiliar está cerrado para energizar el freno externo.
0…999 segundos 0
75 Overload Class Introduzca la clase de disparo de sobrecarga de motor deseada. 5…30 1077 Service Factor Introduzca el factor de servicio del motor. 0.01…1.99 1.1578 Motor FLC Introduzca el valor de corriente a carga plena especificada del motor (FLC). Este valor se debe
introducir y el controlador puede proporcionar la protección de corriente de motor apropiada (tal como sobrecarga).
1.0 a 2200.0 A 1.0
172 Aux1 Configuration
Permite seleccionar la operación del contacto #1 de salida de relé auxiliar (terminales #4 y #5 del módulo de control).(1)
Normal, UTS, Fault, Alarm, External Bypass, External Brake, Auxiliary Control, Network 1, Network 2, Network 3, Network 4, Fan Control
Normal
176 Aux 2 Configuration
Permite seleccionar la operación del contacto #1 de salida de relé auxiliar (terminales 6 y #7 del módulo de control).(1)
Normal
(1) Normal = El contacto está cerrado cuando se inicia el comando Start y permanece cerrado durante una maniobra de paro. Tras finalizarse el paro, se abre el contacto.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 27

Capítulo 2 Programación
Notas:
28 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017

Capítulo 3
Operación y resolución de problemas
Operación Los controladores SMC-50 con derivación integrada pueden controlar motores de inducción conectados en línea estándar con corrientes nominales de 27…480 A o motores tipo estrella-triángulo con corrientes nominales de 47…831 A que funcionan dentro del triángulo.
El controlador de estado sólido SMC-50 pueden controlar motores de inducción conectados en línea con corrientes nominales de 30…520 A o motores tipo estrella-triángulo con corrientes nominales de 52…900 A que funcionan dentro del triángulo.
Configuración del motor El controlador SMC-50 permite el control de motores en configuraciones en estrella conectada en línea, en triángulo conectado en línea, y dentro del trián-gulo. La función de ajuste de motor del controlador SMC-50 determina auto-máticamente la conexión de motor. El controlador realiza automáticamente el ajuste de motor durante el arranque inicial del motor o cuando es forzado por el usuario. También puede introducir la configuración de Motor Connection, parámetro 44, en el controlador SMC-50. Hay que introducir el voltaje nomi-nal en Motor Line Voltage, parámetro 46, para habilitar las funciones de pro-tección de motor (480 V es el valor predeterminado).
Ajuste de motor El controlador SMC-50 realiza el proceso de ajuste de motor al momento de la secuencia de arranque inicial del motor. El ajuste de motor incluye la identifica-ción de los parámetros del motor y la detección del tipo de conexión del motor (línea o triángulo). El controlador SMC-50 usa los datos de ajuste de motor en su algoritmo de control.
Durante el proceso de ajuste, el motor emite algunos ruidos audibles, entre ellos vibraciones y zumbidos. El tiempo que tarda finalizar el proceso de ajuste es de aproximadamente 10…20 segundos, pero varía según el tamaño y las características del motor que se use. Luego de finalizarse correctamente el pro-ceso de ajuste, el motor arranca según el perfil de arranque programado por el usuario. Si interrumpe el proceso de ajuste mediante un comando de paro o la desconexión de alimentación de la unidad, el proceso de ajuste se repite en el próximo comando de arranque. Una vez que se realiza un ajuste correcto, los arranques subsiguientes del motor no ejecutan el proceso de autoajuste.
IMPORTANTE Verifique los valores de voltaje de línea y de control del producto antes de conectar la alimentación eléctrica.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 29

Capítulo 3 Operación y resolución de problemas
Tras el ajuste inicial correcto del motor, puede reiniciarlo según uno de los métodos siguientes:
1. Cambie el estado de Force Tuning, parámetro 194, a TRUE usando una herramienta de configuración (tal como un HIM) con el motor parado. Durante el próximo ciclo de arranque, ocurre el proceso de ajuste y el parámetro 194 vuelve al estado FALSE.
2. Presione el botón “HOLD TO TEST/PUSH TO RESET” ubicado en la parte frontal del controlador durante diez segundos con el motor parado. El proceso de ajuste se realiza durante el próximo ciclo de arranque. El LED de estado parpadea de color ámbar, lo cual indica que el ajuste ocurre durante el próximo ciclo de arranque.
3. Cuando el controlador procesa un comando “Load Factory Defaults” mediante Parameter Management, parámetro 229.
NOTA: Si usa un motor mayor o menor que lo normal para la prueba inicial del sistema, tiene que realizar un ciclo de ajuste del motor que se usa en la instalación final.
Control de carga resistiva El controlador SMC-50 puede controlar cargas resistivas conectadas directamente usando el control de ángulo de fase basado en un valor de referencia. Seleccione este método de control mediante un nuevo parámetro Load Type. La selección de un tipo de carga resistiva modifica el procedimiento de ajuste de motor estándar y permite al controlador SMC-50 variar el voltaje de salida en respuesta a la fuente de referencia (Output V Ref, Analog Input o DeviceLogix™) como porcentaje del rango de pleno voltaje. Puede cambiar el valor de la fuente de referencia mientras el controlador SMC-50 está en un estado de marcha.
NOTA: No se recomienda el uso del control de carga resistiva para las unidades de derivación interna debido a la posibilidad de disparos por sobretemperatura.
Para obtener información adicional sobre este modo de operación, vea el manual del usuario del controlador SMC-50, publicación 150-UM011.
30 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
Operación y resolución de problemas Capítulo 3
Resolución de problemas mediante los LED de diagnóstico
Indicador de estado de los LED del controlador
El indicador de estado de los LED multicolores del controlador SMC-50 y el botón HOLD TO TEST, PUSH TO RESET se encuentran por debajo del puerto de bisel HIM. El LED de estado indica el estado y las condiciones de fallo del controlador SMC-50.
Tabla 13 – Correspondencia entre el color del LED y las condiciones de fallo
El botón HOLD TO TEST, PUSH TO RESET le permite restablecer una alarma/fallo, efectuar una prueba de una condición de fallo e iniciar el modo de ajuste.
Tabla 14 – Iniciación de función del botón HOLD TO TEST, PUSH TO RESET
Resolución de problemas con equipo de monitoreo
El controlador SMC-50 cuenta con códigos de fallo de diagnóstico detallados incorporados y funciones medición. Puede acceder a los códigos de fallo y las funciones de medición mediante un módulo local 20-HIM-A6 o un módulo remoto 20-HIM-C6S o mediante el uso de un paquete de software de variador de Rockwell Automation, tal como el software Connected Components Workbench™.
Resolución de problemas según código de fallo – Lista abreviada
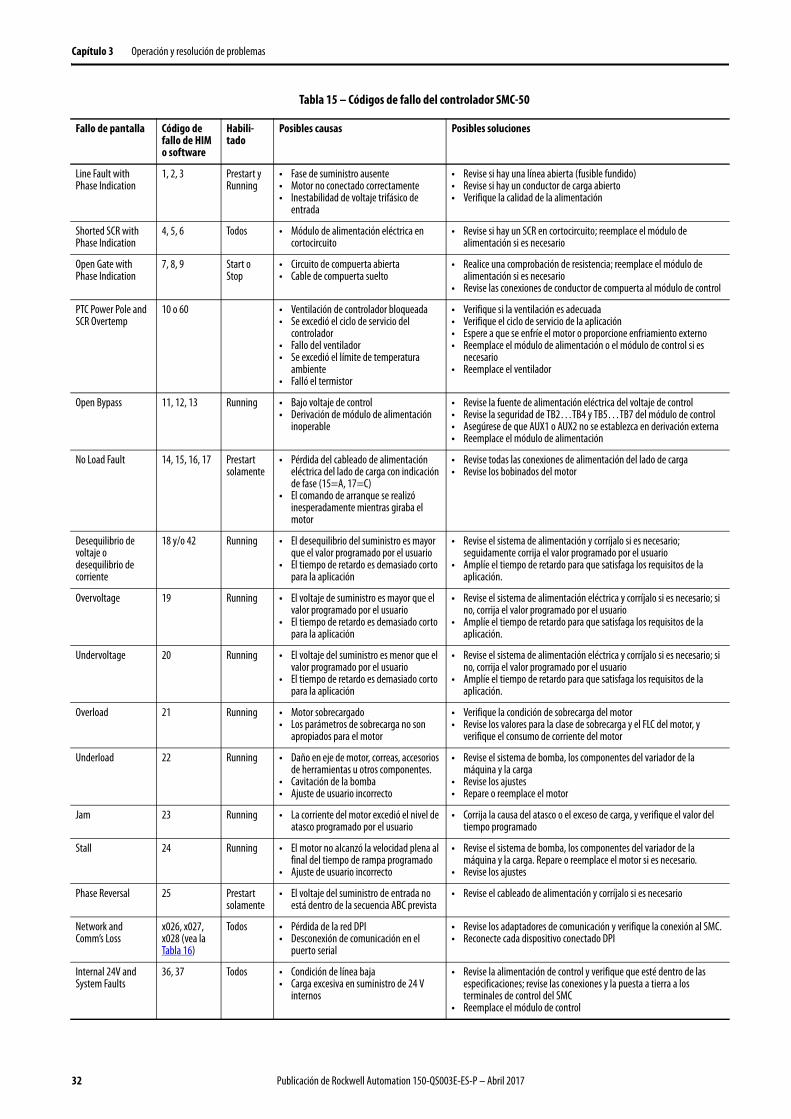
La tabla siguiente contiene una lista abreviada de los códigos de fallo disponibles. Para obtener una lista completa de resolución de problemas, códigos de fallo, descripciones y consejos, vea el manual del usuario del controlador SMC-50, publicación 150-UM011.
Color del LED de estado Modo del dispositivo
Estado del SMC
Verde Running Marcha sin alarma
Verde/ámbar Running Marcha con alarma
Verde parpadeante Ready Listo (sin inhibición y sin fallo) sin alarma
Ámbar parpadeante Ready Listo (sin inhibición y sin fallo) con ajuste habilitado en el próximo arranque
Ámbar Ready Listo con alarma (sin ajuste habilitado)
Rojo/ámbar Inhibit Inhibido; no se puede arrancar debido a un comando Stop
Rojo Faulted Ocurrió un fallo no borrable
Rojo parpadeante Faulted Ocurrió un fallo borrable
Rojo y verde Download Se está descargando el firmware
Función Tiempo requerido para presionar el botón
Fault Reset Momentáneo (menos de 2 segundos)
Test Fault Mayor que 3 segundos, pero menos de 10 segundos
Initiate Tuning Mode Mayor que 10 segundos(1)
(1) Hay que parar el motor.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 31
Capítulo 3 Operación y resolución de problemas
Tabla 15 – Códigos de fallo del controlador SMC-50
Fallo de pantalla Código de fallo de HIM o software
Habili-tado
Posibles causas Posibles soluciones
Line Fault with Phase Indication
1, 2, 3 Prestart y Running
• Fase de suministro ausente• Motor no conectado correctamente• Inestabilidad de voltaje trifásico de
entrada
• Revise si hay una línea abierta (fusible fundido)• Revise si hay un conductor de carga abierto• Verifique la calidad de la alimentación
Shorted SCR with Phase Indication
4, 5, 6 Todos • Módulo de alimentación eléctrica en cortocircuito
• Revise si hay un SCR en cortocircuito; reemplace el módulo de alimentación si es necesario
Open Gate with Phase Indication
7, 8, 9 Start o Stop
• Circuito de compuerta abierta• Cable de compuerta suelto
• Realice una comprobación de resistencia; reemplace el módulo de alimentación si es necesario
• Revise las conexiones de conductor de compuerta al módulo de control
PTC Power Pole and SCR Overtemp
10 o 60 • Ventilación de controlador bloqueada• Se excedió el ciclo de servicio del
controlador• Fallo del ventilador• Se excedió el límite de temperatura
ambiente• Falló el termistor
• Verifique si la ventilación es adecuada• Verifique el ciclo de servicio de la aplicación• Espere a que se enfríe el motor o proporcione enfriamiento externo• Reemplace el módulo de alimentación o el módulo de control si es
necesario• Reemplace el ventilador
Open Bypass 11, 12, 13 Running • Bajo voltaje de control• Derivación de módulo de alimentación
inoperable
• Revise la fuente de alimentación eléctrica del voltaje de control• Revise la seguridad de TB2…TB4 y TB5…TB7 del módulo de control• Asegúrese de que AUX1 o AUX2 no se establezca en derivación externa• Reemplace el módulo de alimentación
No Load Fault 14, 15, 16, 17 Prestart solamente
• Pérdida del cableado de alimentación eléctrica del lado de carga con indicación de fase (15=A, 17=C)
• El comando de arranque se realizó inesperadamente mientras giraba el motor
• Revise todas las conexiones de alimentación del lado de carga• Revise los bobinados del motor
Desequilibrio de voltaje o desequilibrio de corriente
18 y/o 42 Running • El desequilibrio del suministro es mayor que el valor programado por el usuario
• El tiempo de retardo es demasiado corto para la aplicación
• Revise el sistema de alimentación y corríjalo si es necesario; seguidamente corrija el valor programado por el usuario
• Amplíe el tiempo de retardo para que satisfaga los requisitos de la aplicación.
Overvoltage 19 Running • El voltaje de suministro es mayor que el valor programado por el usuario
• El tiempo de retardo es demasiado corto para la aplicación
• Revise el sistema de alimentación eléctrica y corríjalo si es necesario; si no, corrija el valor programado por el usuario
• Amplíe el tiempo de retardo para que satisfaga los requisitos de la aplicación.
Undervoltage 20 Running • El voltaje del suministro es menor que el valor programado por el usuario
• El tiempo de retardo es demasiado corto para la aplicación
• Revise el sistema de alimentación eléctrica y corríjalo si es necesario; si no, corrija el valor programado por el usuario
• Amplíe el tiempo de retardo para que satisfaga los requisitos de la aplicación.
Overload 21 Running • Motor sobrecargado• Los parámetros de sobrecarga no son
apropiados para el motor
• Verifique la condición de sobrecarga del motor• Revise los valores para la clase de sobrecarga y el FLC del motor, y
verifique el consumo de corriente del motor
Underload 22 Running • Daño en eje de motor, correas, accesorios de herramientas u otros componentes.
• Cavitación de la bomba• Ajuste de usuario incorrecto
• Revise el sistema de bomba, los componentes del variador de la máquina y la carga
• Revise los ajustes• Repare o reemplace el motor
Jam 23 Running • La corriente del motor excedió el nivel de atasco programado por el usuario
• Corrija la causa del atasco o el exceso de carga, y verifique el valor del tiempo programado
Stall 24 Running • El motor no alcanzó la velocidad plena al final del tiempo de rampa programado
• Ajuste de usuario incorrecto
• Revise el sistema de bomba, los componentes del variador de la máquina y la carga. Repare o reemplace el motor si es necesario.
• Revise los ajustes
Phase Reversal 25 Prestart solamente
• El voltaje del suministro de entrada no está dentro de la secuencia ABC prevista
• Revise el cableado de alimentación y corríjalo si es necesario
Network and Comm’s Loss
x026, x027, x028 (vea la Tabla 16)
Todos • Pérdida de la red DPI• Desconexión de comunicación en el
puerto serial
• Revise los adaptadores de comunicación y verifique la conexión al SMC. • Reconecte cada dispositivo conectado DPI
Internal 24V and System Faults
36, 37 Todos • Condición de línea baja• Carga excesiva en suministro de 24 V
internos
• Revise la alimentación de control y verifique que esté dentro de las especificaciones; revise las conexiones y la puesta a tierra a los terminales de control del SMC
• Reemplace el módulo de control
32 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
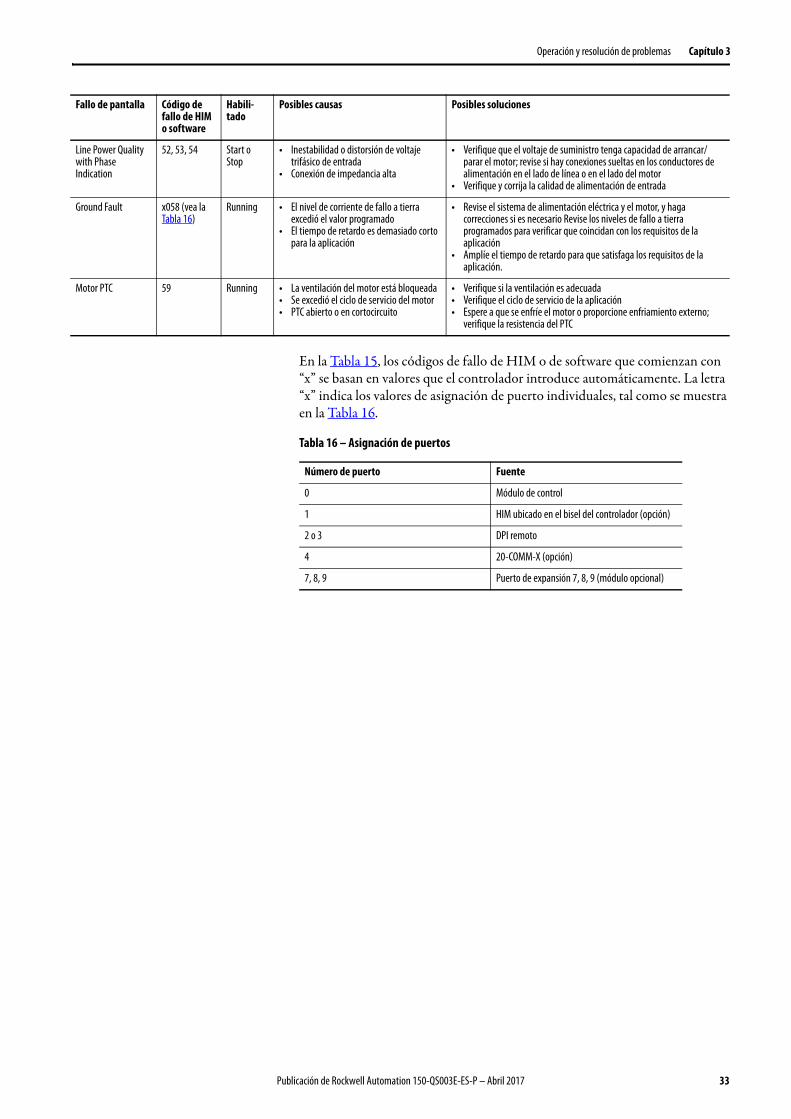
Operación y resolución de problemas Capítulo 3
En la Tabla 15, los códigos de fallo de HIM o de software que comienzan con “x” se basan en valores que el controlador introduce automáticamente. La letra “x” indica los valores de asignación de puerto individuales, tal como se muestra en la Tabla 16.
Tabla 16 – Asignación de puertos
Line Power Quality with Phase Indication
52, 53, 54 Start o Stop
• Inestabilidad o distorsión de voltaje trifásico de entrada
• Conexión de impedancia alta
• Verifique que el voltaje de suministro tenga capacidad de arrancar/parar el motor; revise si hay conexiones sueltas en los conductores de alimentación en el lado de línea o en el lado del motor
• Verifique y corrija la calidad de alimentación de entrada
Ground Fault x058 (vea la Tabla 16)
Running • El nivel de corriente de fallo a tierra excedió el valor programado
• El tiempo de retardo es demasiado corto para la aplicación
• Revise el sistema de alimentación eléctrica y el motor, y haga correcciones si es necesario Revise los niveles de fallo a tierra programados para verificar que coincidan con los requisitos de la aplicación
• Amplíe el tiempo de retardo para que satisfaga los requisitos de la aplicación.
Motor PTC 59 Running • La ventilación del motor está bloqueada• Se excedió el ciclo de servicio del motor• PTC abierto o en cortocircuito
• Verifique si la ventilación es adecuada• Verifique el ciclo de servicio de la aplicación• Espere a que se enfríe el motor o proporcione enfriamiento externo;
verifique la resistencia del PTC
Fallo de pantalla Código de fallo de HIM o software
Habili-tado
Posibles causas Posibles soluciones
Número de puerto Fuente
0 Módulo de control
1 HIM ubicado en el bisel del controlador (opción)
2 o 3 DPI remoto
4 20-COMM-X (opción)
7, 8, 9 Puerto de expansión 7, 8, 9 (módulo opcional)
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 33

Capítulo 3 Operación y resolución de problemas
Notas:
34 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017
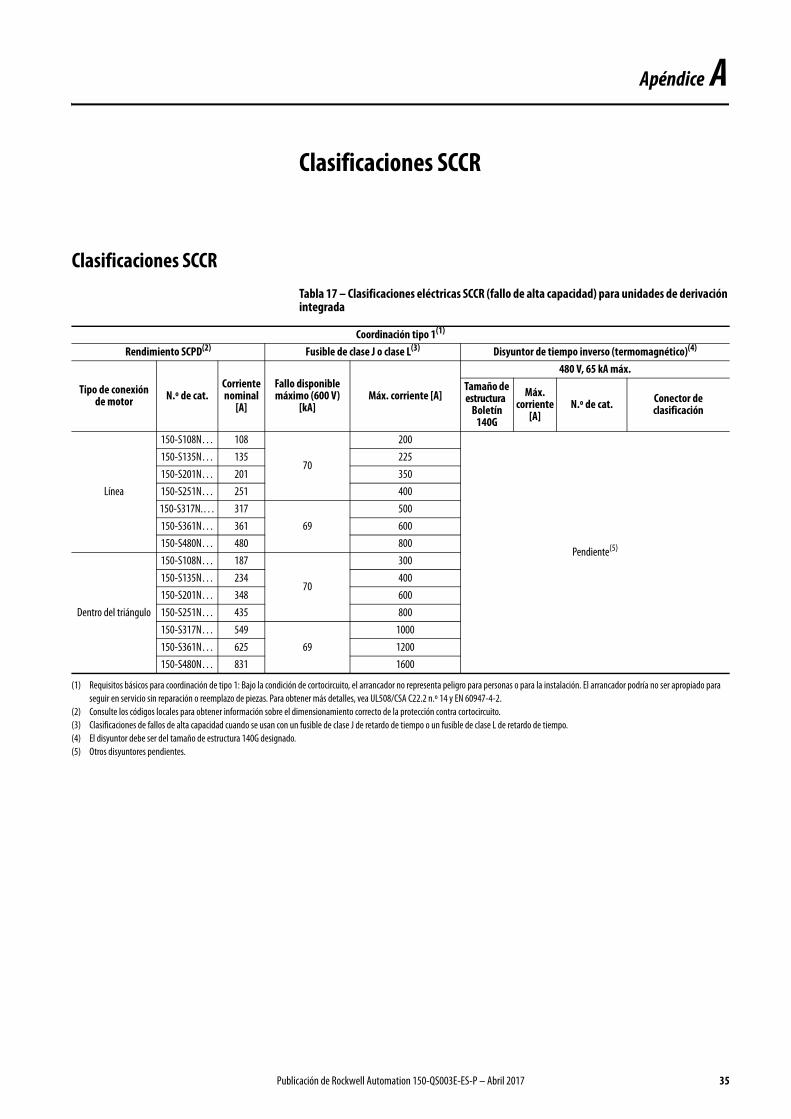
Apéndice A
Clasificaciones SCCR
Clasificaciones SCCRTabla 17 – Clasificaciones eléctricas SCCR (fallo de alta capacidad) para unidades de derivación integrada
Coordinación tipo 1(1)
Rendimiento SCPD(2) Fusible de clase J o clase L(3) Disyuntor de tiempo inverso (termomagnético)(4)
Tipo de conexión de motor N.º de cat.
Corriente nominal
[A]
Fallo disponible máximo (600 V)
[kA]Máx. corriente [A]
480 V, 65 kA máx.Tamaño de estructura
Boletín 140G
Máx. corriente
[A]N.º de cat. Conector de
clasificación
Línea
150-S108N… 108
70
200
Pendiente(5)
150-S135N… 135 225150-S201N… 201 350150-S251N… 251 400150-S317N.… 317
69500
150-S361N… 361 600150-S480N… 480 800
Dentro del triángulo
150-S108N… 187
70
300150-S135N… 234 400150-S201N… 348 600150-S251N… 435 800150-S317N… 549
691000
150-S361N… 625 1200150-S480N… 831 1600
(1) Requisitos básicos para coordinación de tipo 1: Bajo la condición de cortocircuito, el arrancador no representa peligro para personas o para la instalación. El arrancador podría no ser apropiado para seguir en servicio sin reparación o reemplazo de piezas. Para obtener más detalles, vea UL508/CSA C22.2 n.º 14 y EN 60947-4-2.
(2) Consulte los códigos locales para obtener información sobre el dimensionamiento correcto de la protección contra cortocircuito.(3) Clasificaciones de fallos de alta capacidad cuando se usan con un fusible de clase J de retardo de tiempo o un fusible de clase L de retardo de tiempo.(4) El disyuntor debe ser del tamaño de estructura 140G designado.(5) Otros disyuntores pendientes.
Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 35
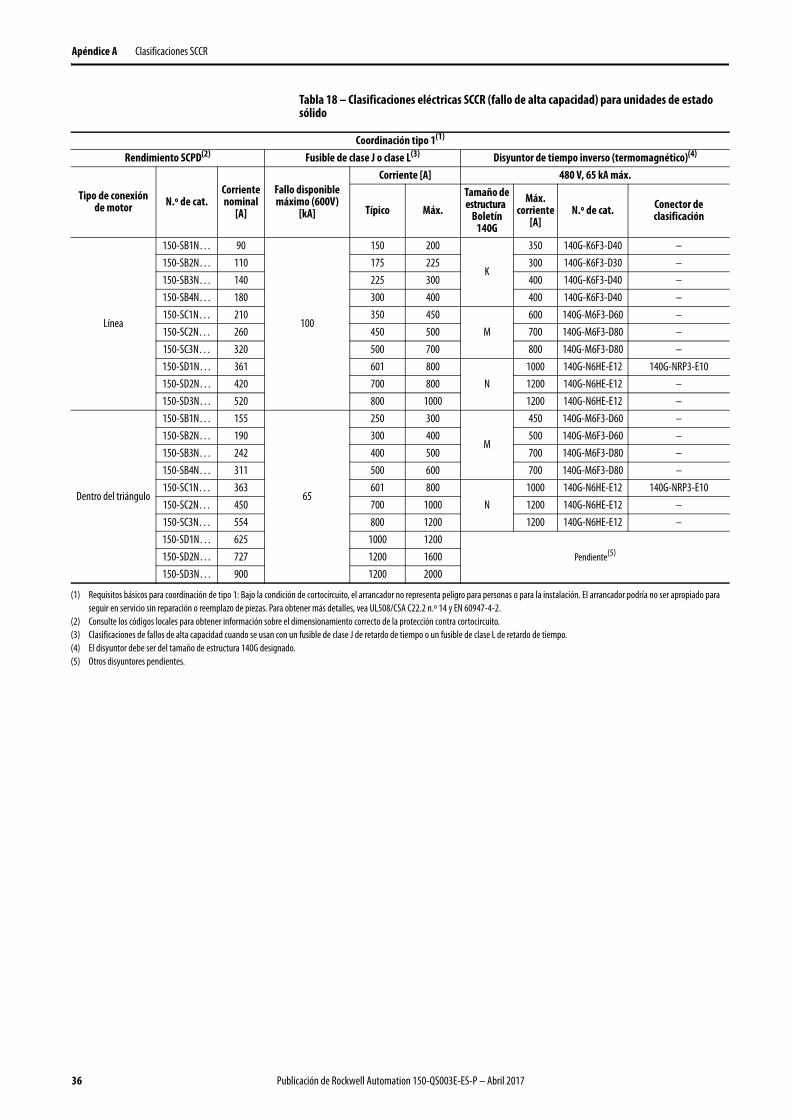
Apéndice A Clasificaciones SCCR
Tabla 18 – Clasificaciones eléctricas SCCR (fallo de alta capacidad) para unidades de estado sólido
Coordinación tipo 1(1)
Rendimiento SCPD(2) Fusible de clase J o clase L(3) Disyuntor de tiempo inverso (termomagnético)(4)
Tipo de conexión de motor N.º de cat.
Corriente nominal
[A]
Fallo disponible máximo (600V)
[kA]
Corriente [A] 480 V, 65 kA máx.
Típico Máx.Tamaño de estructura
Boletín 140G
Máx. corriente
[A]N.º de cat. Conector de
clasificación
Línea
150-SB1N… 90
100
150 200
K
350 140G-K6F3-D40 –150-SB2N… 110 175 225 300 140G-K6F3-D30 –150-SB3N… 140 225 300 400 140G-K6F3-D40 –150-SB4N… 180 300 400 400 140G-K6F3-D40 –150-SC1N… 210 350 450
M600 140G-M6F3-D60 –
150-SC2N… 260 450 500 700 140G-M6F3-D80 –150-SC3N… 320 500 700 800 140G-M6F3-D80 –150-SD1N… 361 601 800
N1000 140G-N6HE-E12 140G-NRP3-E10
150-SD2N… 420 700 800 1200 140G-N6HE-E12 –150-SD3N… 520 800 1000 1200 140G-N6HE-E12 –
Dentro del triángulo
150-SB1N… 155
65
250 300
M
450 140G-M6F3-D60 –150-SB2N… 190 300 400 500 140G-M6F3-D60 –150-SB3N… 242 400 500 700 140G-M6F3-D80 –150-SB4N… 311 500 600 700 140G-M6F3-D80 –150-SC1N… 363 601 800
N1000 140G-N6HE-E12 140G-NRP3-E10
150-SC2N… 450 700 1000 1200 140G-N6HE-E12 –150-SC3N… 554 800 1200 1200 140G-N6HE-E12 –150-SD1N… 625 1000 1200
Pendiente(5)150-SD2N… 727 1200 1600150-SD3N… 900 1200 2000
(1) Requisitos básicos para coordinación de tipo 1: Bajo la condición de cortocircuito, el arrancador no representa peligro para personas o para la instalación. El arrancador podría no ser apropiado para seguir en servicio sin reparación o reemplazo de piezas. Para obtener más detalles, vea UL508/CSA C22.2 n.º 14 y EN 60947-4-2.
(2) Consulte los códigos locales para obtener información sobre el dimensionamiento correcto de la protección contra cortocircuito.(3) Clasificaciones de fallos de alta capacidad cuando se usan con un fusible de clase J de retardo de tiempo o un fusible de clase L de retardo de tiempo.(4) El disyuntor debe ser del tamaño de estructura 140G designado.(5) Otros disyuntores pendientes.
36 Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017


Publicación de Rockwell Automation 150-QS003E-ES-P – Abril 2017 Copyright © 2017 Rockwell Automation, Inc. Todos los derechos reservados. Impreso en EE. UU.
Servicio de asistencia técnica de Rockwell AutomationUse los recursos siguientes para obtener acceso a información de asistencia técnica.
Comentarios sobre la documentaciónSus comentarios nos ayudarán a atender mejor sus necesidades de documentación. Si tiene sugerencias sobre cómo mejorar este documento, rellene el formulario How Are We Doing? en http://literature.rockwellautomation.com/idc/groups/literature/documents/du/ra-du002_-en-e.pdf.
Centro de asistencia técnicaArtículos de Knowledgebase, videos instructivos, preguntas más frecuentes, charlas, foros de usuarios y actualizaciones de notificación de producto.
https://rockwellautomation.custhelp.com/
Números de teléfono de asistencia técnica local
Encuentre el número de teléfono correspondiente a su país. http://www.rockwellautomation.com/global/support/get-support-now.page
Códigos de discado directoEncuentre el código de discado directo de su producto. Use el código para encaminar su llamada directamente a un ingeniero de asistencia técnica.
http://www.rockwellautomation.com/global/support/direct-dial.page
Literature Library Instrucciones de instalación, manuales, folletos y datos técnicos. http://www.rockwellautomation.com/global/literature-library/overview.page
Centro de compatibilidad y descarga de productos (PCDC)
Obtenga ayuda para determinar cómo interactúan los productos, verificar características y capacidades, y encontrar firmware asociado.
http://www.rockwellautomation.com/global/support/pcdc.page
Allen-Bradley, Connected Component Workbench, DeviceLogix, DPI, PowerFlex, Rockwell Software, Rockwell Automation, SMB, SMC y TechConnect son marcas comerciales de Rockwell Automation, Inc.Las marcas comerciales que no pertenecen a Rockwell Automation son propiedad de sus respectivas compañías.
Rockwell Automation ofrece información medioambiental actualizada sobre productos en su sitio web en http://www.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page.