ingemecanica.com · documento nº 1 memoria: memoria descriptiva miguel Ángel hernández...
TRANSCRIPT

Diseño del conjunto eje-acoplamiento-reductora epicicloidal
de un aerogenerador eólico
Titulación: Ingeniería Técnica Industrial, Esp. Mecánica
Intensificación: Construcción de Maquinaria Alumno/a: Miguel Ángel Hernández
Rodríguez Director/a/s: Miguel Lucas Rodríguez
Cartagena, 27 de Octubre de 2011
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 0 de 13
INDICE
1.1 ANTECEDENTES .................................................................................................................................. 1
1.2 OBJETO ............................................................................................................................................... 1
1.3 DESCRIPCIÓN GENERAL DEL TREN DE POTENCIA .............................................................................. 1
1.4 AERODINÁMICA DE AEROGENERADORES ......................................................................................... 3
1.4.1 La energía del viento ............................................................................................................ 3
1.4.2 La fuerza del viento .............................................................................................................. 4
1.4.3 Máxima potencia extraíble del viento .................................................................................. 4
1.4.4 El rotor .................................................................................................................................. 5
1.5 LOCALIZACIÓN O EMPLAZAMIENTO .................................................................................................. 6
1.6 ESTIMACIÓN DELOS RECURSOS ENERGÉTICOS.................................................................................. 7
1.7 PRESUPUESTO .................................................................................................................................. 11
1.8 AGRADECIMIENTOS ......................................................................................................................... 11
1.9 DOCUMENTOS DE LOS QUE CONSTA ............................................................................................... 12
1.10 BIBLIOGRAFÍA ................................................................................................................................. 12
1.11 CONCLUSIÓN A LA MEMORIA ........................................................................................................ 13
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 1 de 13
1.1 ANTECEDENTES
A petición del Departamento de Ingeniería Mecánica de la Universidad Politécnica de Cartagena se
ha encargado al alumno de Ingeniería Técnica Industrial Miguel Ángel Hernández Rodríguez la
redacción del Proyecto Industrial “Diseño del conjunto eje-acoplamiento-reductora epicicloidal de un
aerogenerador eólico” como proyecto fin de carrera y de acuerdo a la legislación vigente conseguir
por parte de los organismos oficiales la obtención del título Ingeniero Técnico Industrial, especialidad
en Mecánica.
1.2 OBJETO
El presente proyecto industrial tiene por objeto la fabricación y montaje de todos los elementos que
componen el conjunto eje-acoplamiento-reductora epicicloidal necesarios para su integración en un
generador eólico a situar en la Bahía de Portmán en la provincia de Murcia, así como la solicitación a
los organismos competentes de las pertinentes licencias para su desarrollo y puesta en marcha, al
mismo tiempo que se describen detalladamente todos los elementos integrantes en el sistema.
1.3 DESCRIPCIÓN GENERAL DEL TREN DE POTENCIA
El tren de potencia tiene la importante tarea de transformar la energía de rotación del rotor en
energía eléctrica. El tren motriz se compone de varios elementos, cada uno de ellos contribuye a una
tarea específica, el más complejo de todos ellos es la caja multiplicadora, responsable de aumentar la
velocidad angular de transmisión del rotor del generador, para satisfacer la velocidad requerida por
el generador. Como se ha comentado anteriormente, es el componente de mayor complejidad
mecánica en el tren motriz y el responsable de los mayores tiempos de inactividad operacional de la
turbina eólica, con el consiguiente aumento de los costos.
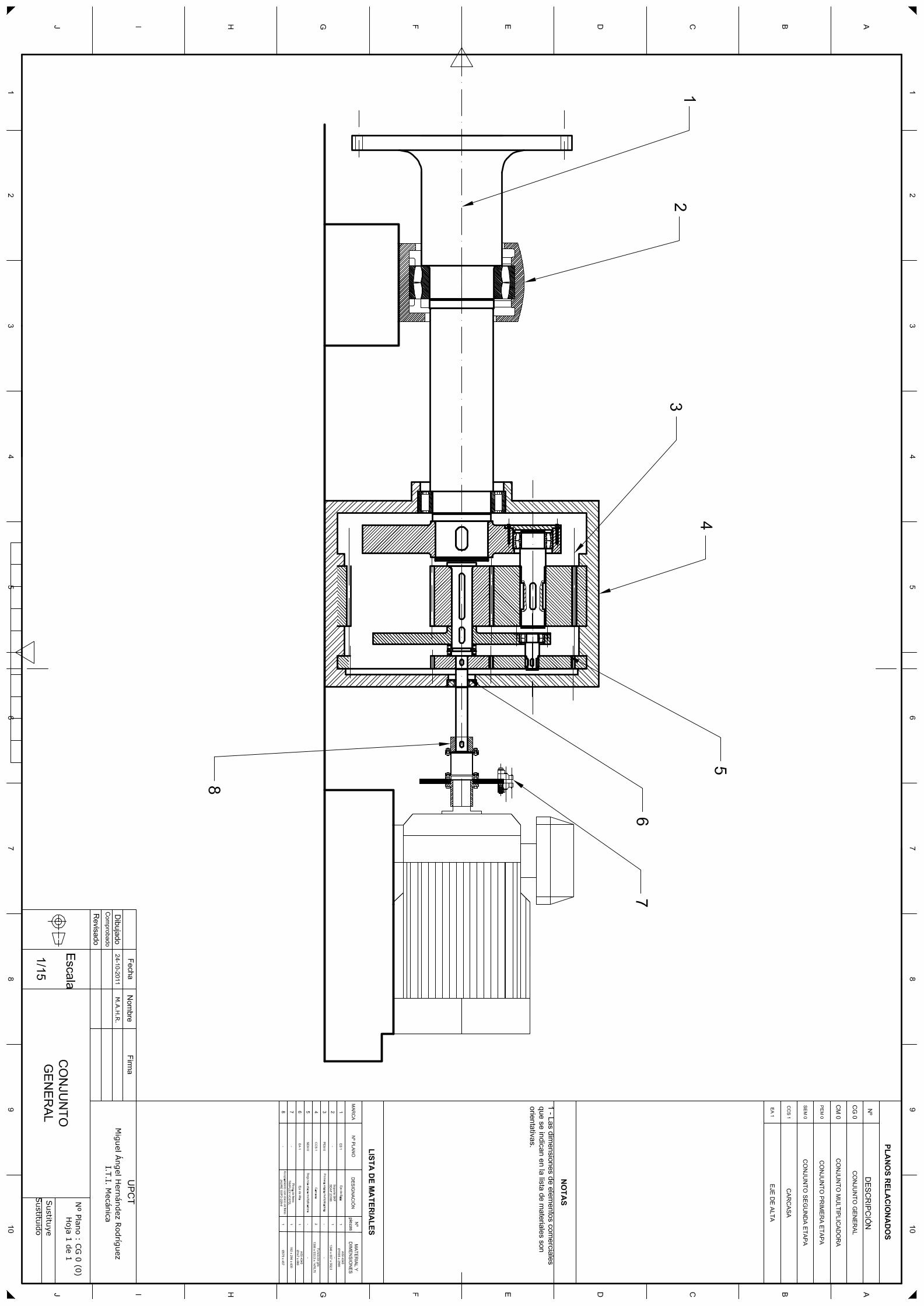
El tren de potencia del aerogenerador estará compuesto por los siguientes elementos:
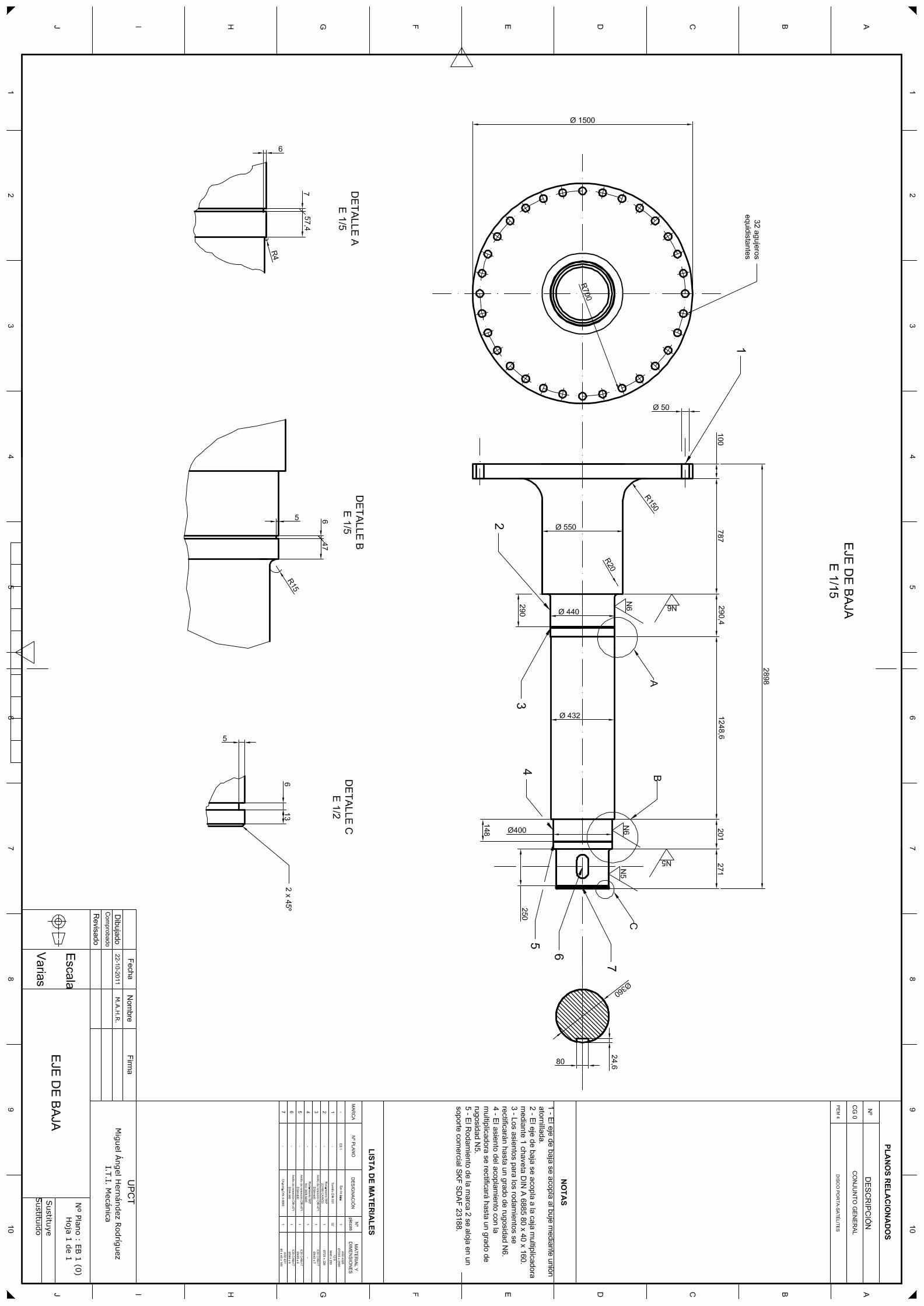
-Eje de baja velocidad o eje principal:
Acoplado a un rotor eólico constituido por un buje y tres palas con una velocidad constante de
funcionamiento de 22,16 rpm. Tiene una longitud total de 3.000 mm, y se apoya sobre dos
rodamientos.
El rodamiento principal se encuentra situado a 1.000 mm del acoplamiento con el buje, se
trata de un rodamiento de rodillos a rótula capaz de soportar las cargas axiales y radiales que
se transmiten desde el rótor eólico.
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 2 de 13
El rodamiento secundario está integrado en la carcasa de la caja multiplicadora, y se encuentra
situado a una distancia de 2.500 mm del acoplamiento con el buje. Se trata de un rodamiento
de rodillos cilíndricos que únicamente soporta carga radial.
El eje de baja está fabricado en acero F-127 o AISI 4340, el acoplamiento con el plato porta-
satélites de la primera etapa de la multiplicadora se realiza mediante chaveta y el acople con el
rótor eólico mediante 32 tornillos.
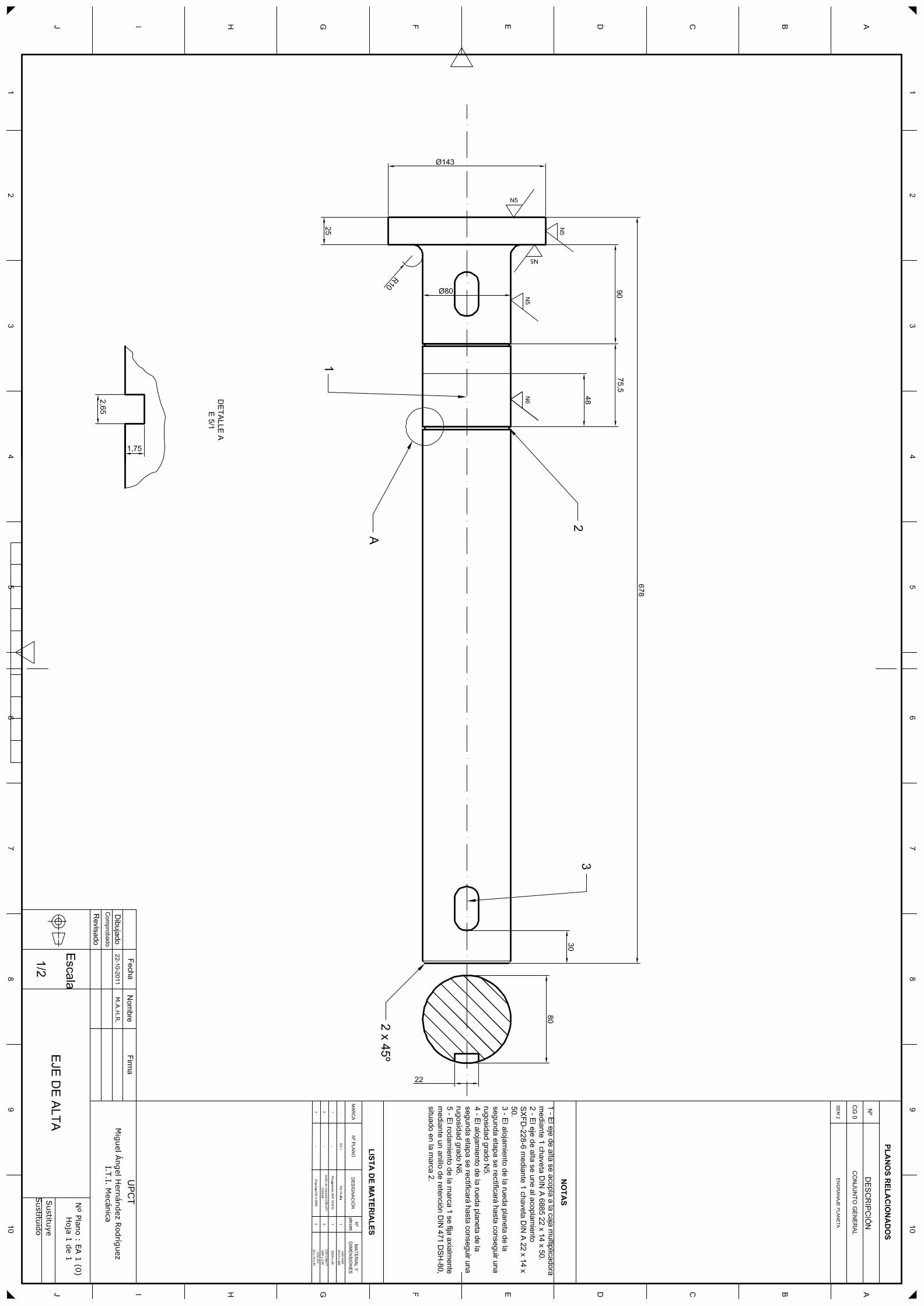
-Eje de alta velocidad
Acoplado al engranaje planetario de la segunda etapa mediante chaveta y al generador
eléctrico mediante acoplamiento comercial.
Está fabricado en acero F-127 o AISI 4340 y posee una velocidad de funcionamiento fija de
1.500 rpm. Se apoya en la caja multiplicadora sobre un rodamiento de bolas con contacto
angular.
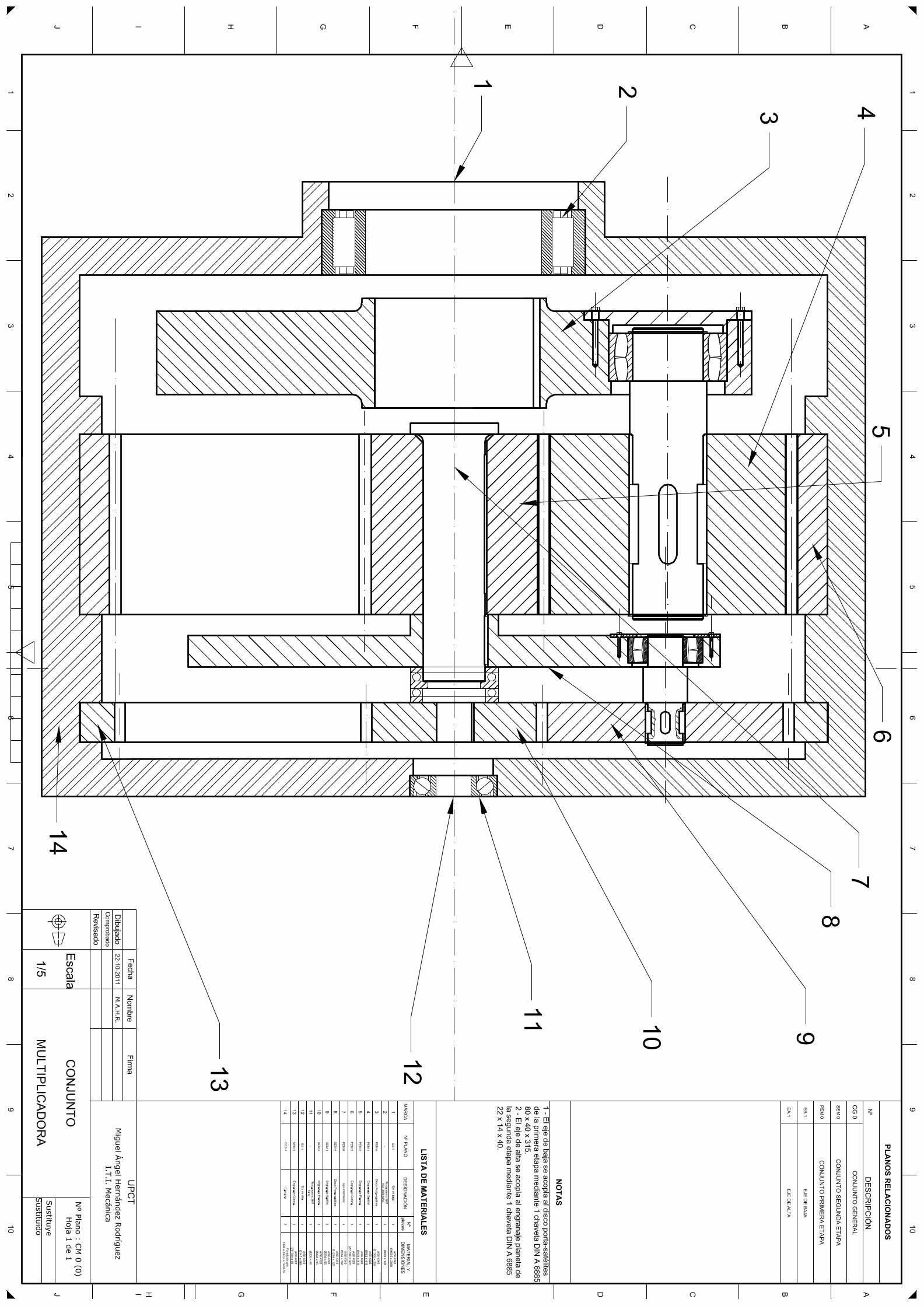
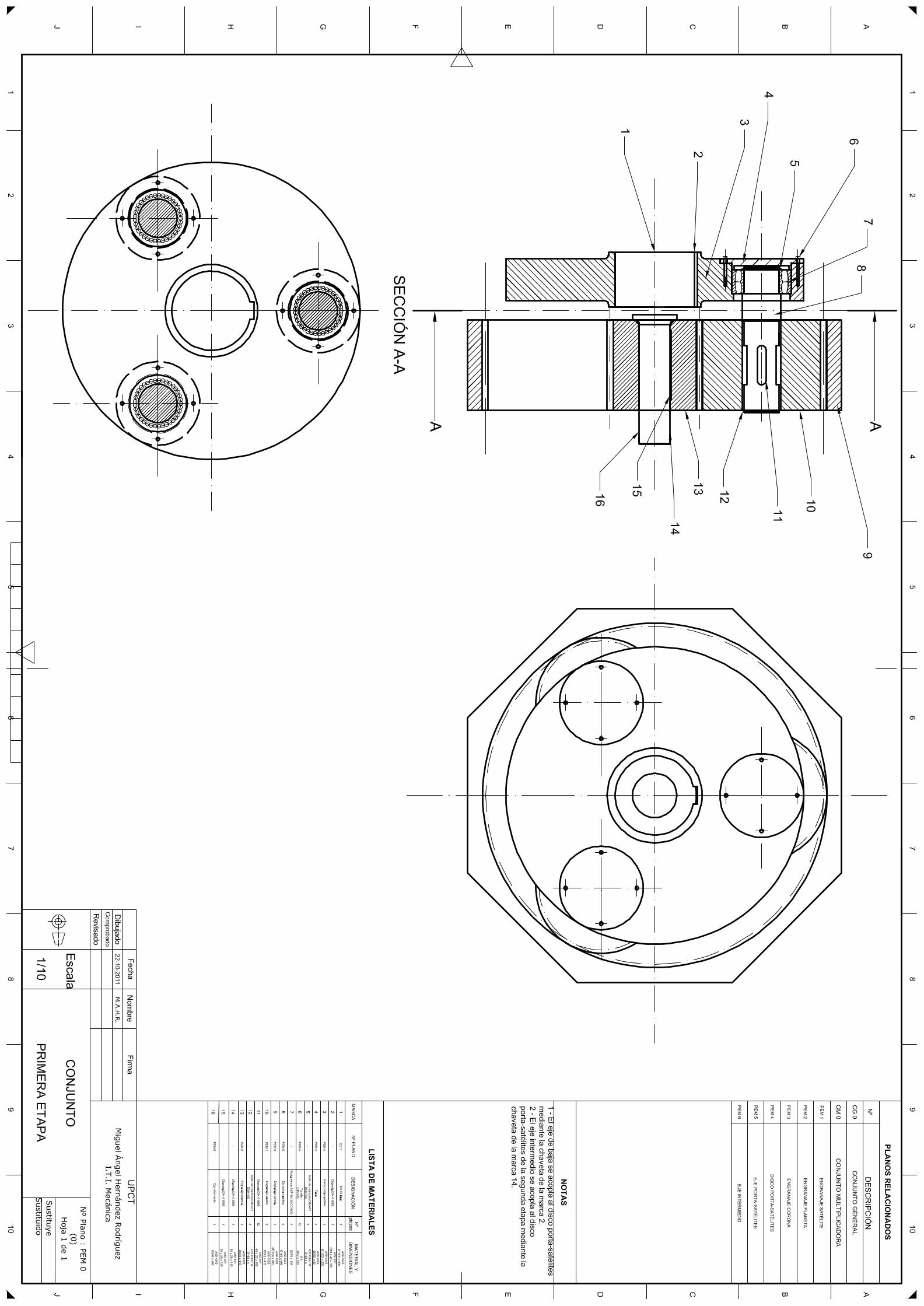
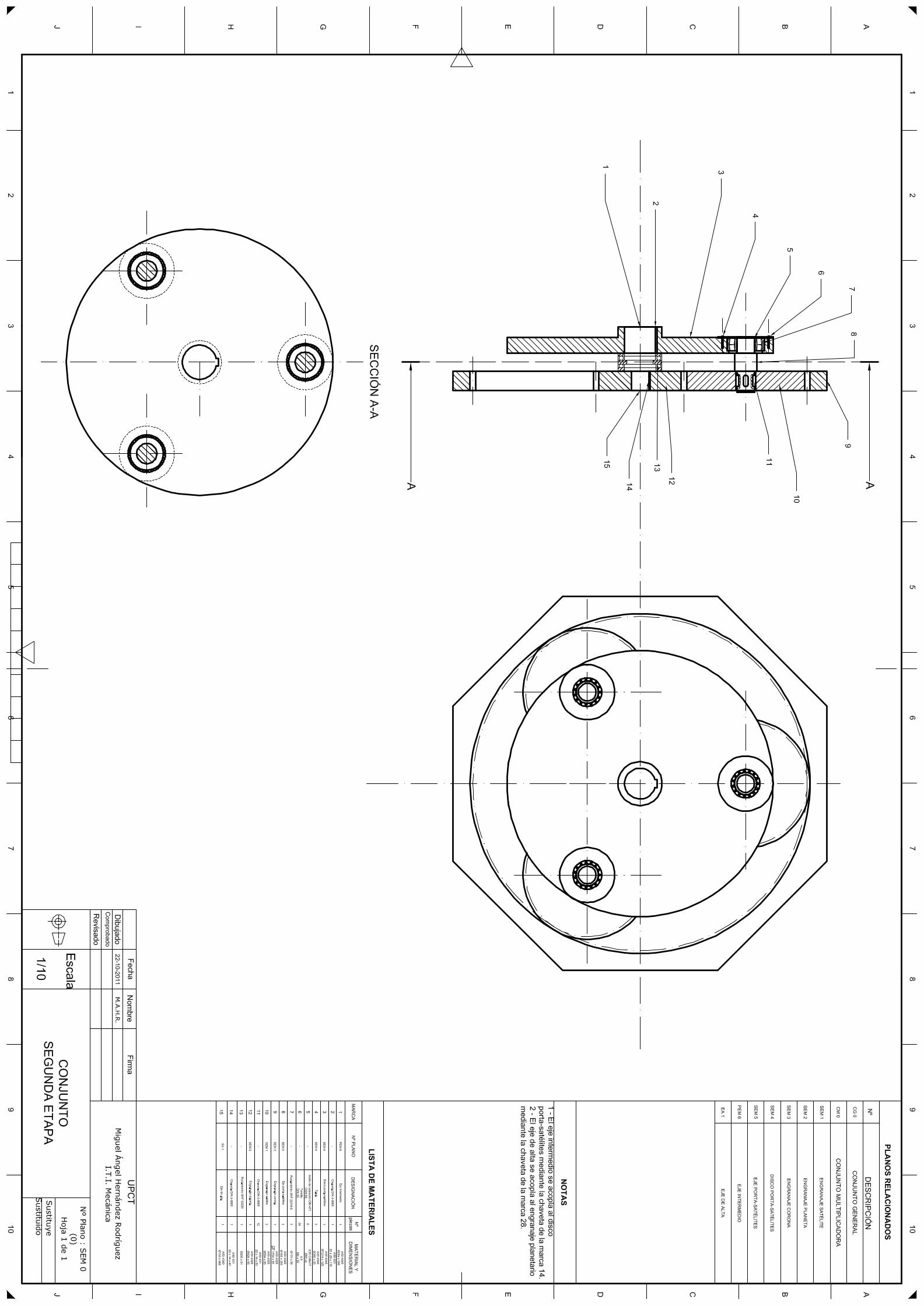
-Caja multiplicadora de velocidad de dos etapas de multiplicación de engranajes epicicloidales:
Relación de multiplicación de 8,211/1 en la primera etapa y de 8,249/1 en la segunda etapa
para un total de 67,74/1 entre la entrada y la salida. Ésta configuración de los engranajes
permite que los ejes de alta y de baja velocidad sean coaxiales. Todos los engranajes de la caja
multiplicadora se fabrican en acero AISI 4320 con un tratamiento superficial de cementado,
que será de grado AGMA 2 en el caso de la primera etapa y de grado AGMA 1 en la segunda
etapa.
Los ejes y los platos porta-satélites se fabrican en acero AISI 4340 y se unen a sus respectivos
acoples mediante chavetas.
La fijación axial de todos los elementos a los ejes se realiza mediante anillos de retención DIN
471 a excepción del eje de alta velocidad y el eje intermedio que se fijan interponiendo entre
ambos un rodamiento axial de bolas de doble efecto.
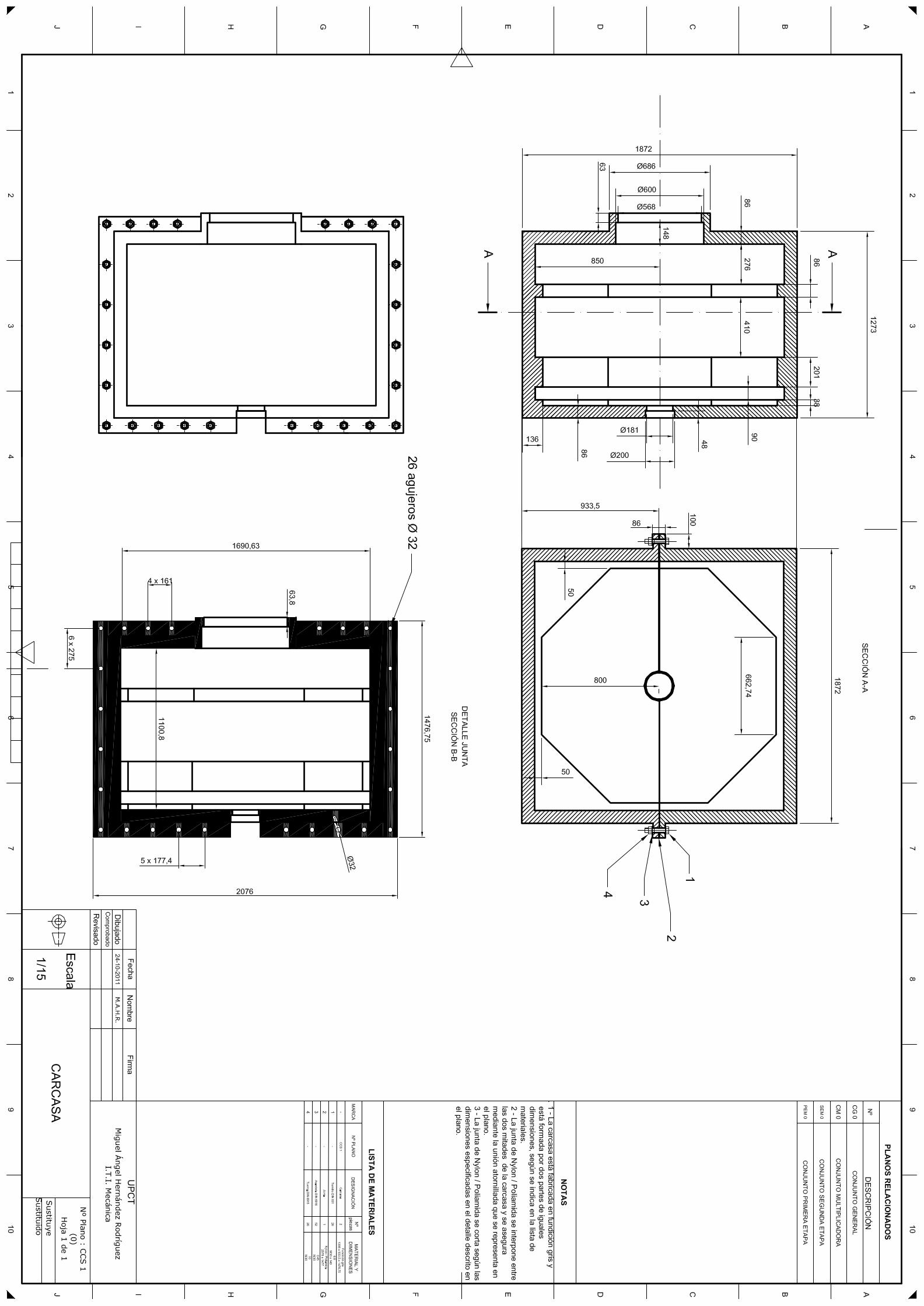
-Carcasa formada por dos partes iguales fabricadas en fundición gris A48-94 de 86 mm. de
espesor con junta estanca intermedia de Nylon/Poliamida de 5 mm. de espesor y unidas
mediante 26 tornillos.
-La velocidad del viento necesaria para arrancar el rotor será de 3,5 m/s y la de parada de 25
m/s controlado por un freno de disco situado en el eje de alta velocidad y un sistema de
control de potencia activo que regula el ángulo de paso de las palas del rotor.
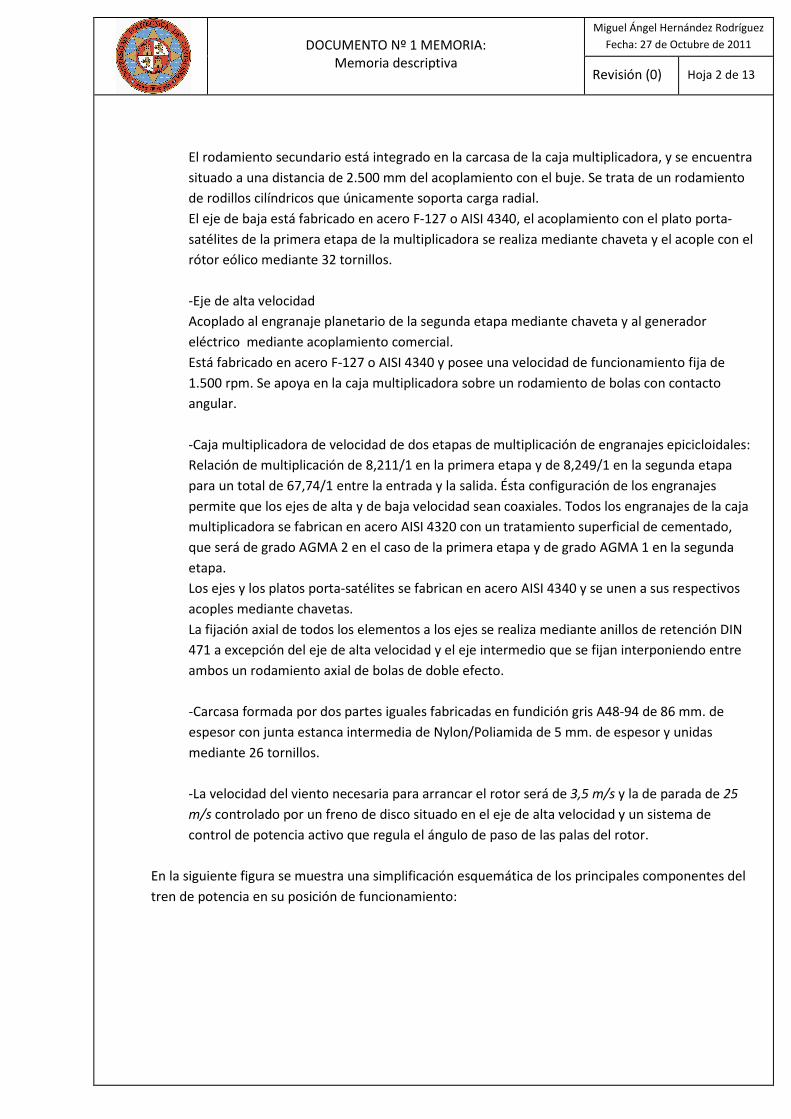
En la siguiente figura se muestra una simplificación esquemática de los principales componentes del
tren de potencia en su posición de funcionamiento:
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 3 de 13
1.4 AERODINÁMICA DE AEROGENERADORES
1.4.1 La energía del viento
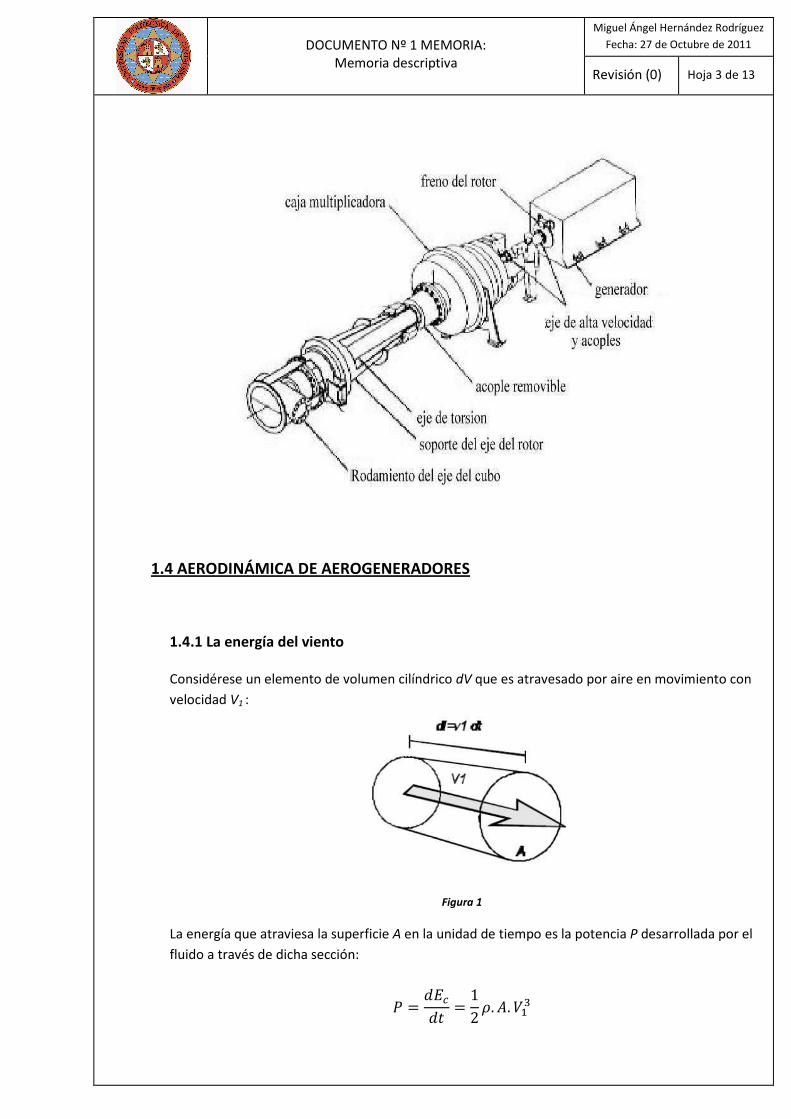
Considérese un elemento de volumen cilíndrico dV que es atravesado por aire en movimiento con
velocidad V1 :
Figura 1
La energía que atraviesa la superficie A en la unidad de tiempo es la potencia P desarrollada por el
fluido a través de dicha sección:
� =���
��=1
2. �. �
�
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 4 de 13
Se tiene así, que la potencia del viento es proporcional a la densidad del aire, al área de sección
considerada y al cubo de su velocidad.
1.4.2 La fuerza del viento
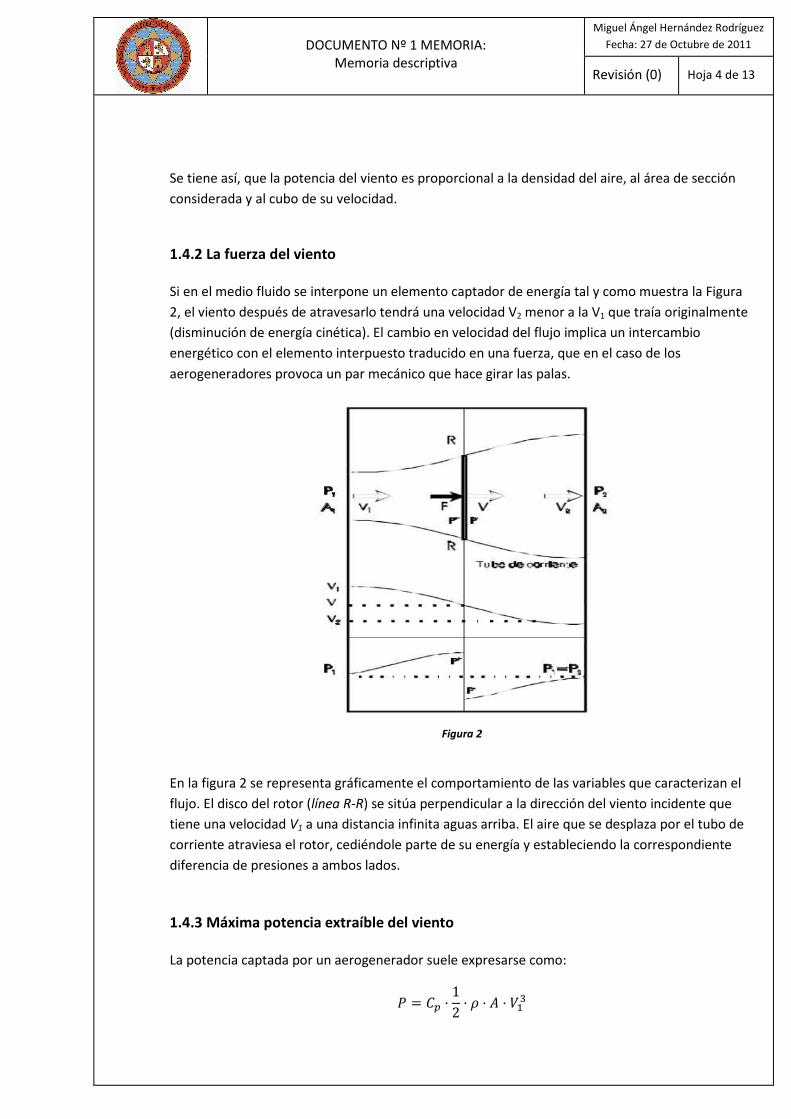
Si en el medio fluido se interpone un elemento captador de energía tal y como muestra la Figura
2, el viento después de atravesarlo tendrá una velocidad V2 menor a la V1 que traía originalmente
(disminución de energía cinética). El cambio en velocidad del flujo implica un intercambio
energético con el elemento interpuesto traducido en una fuerza, que en el caso de los
aerogeneradores provoca un par mecánico que hace girar las palas.
Figura 2
En la figura 2 se representa gráficamente el comportamiento de las variables que caracterizan el
flujo. El disco del rotor (línea R-R) se sitúa perpendicular a la dirección del viento incidente que
tiene una velocidad V1 a una distancia infinita aguas arriba. El aire que se desplaza por el tubo de
corriente atraviesa el rotor, cediéndole parte de su energía y estableciendo la correspondiente
diferencia de presiones a ambos lados.
1.4.3 Máxima potencia extraíble del viento
La potencia captada por un aerogenerador suele expresarse como:
� = �� ·1
2· · � · �
�

DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 5 de 13
donde CP es el coeficiente de potencia que determina el rendimiento aerodinámico del rotor.
1.4.4 El rotor
En los sistemas eólicos el elemento captador consiste en una hélice que transforma la energía
cinética del viento en energía rotacional que es comunicada a un generador eléctrico
aerogeneradores), a un sistema de bombeo (aerobombas) o a un sistema para moler grano
(molino de viento tradicional). El principal elemento de estas hélices es la pala.
El dimensionamiento de un rotor es una tarea complicada y que requiere integrar los
conocimientos de diferentes disciplinas: además de aerodinámica, hay que tener en cuenta
aspectos estructurales (estáticos y dinámicos), de generación de ruido, de fabricación, etc.
Como primera aproximación se necesita saber cuánta potencia debe generar el rotor, a qué
velocidad debe generarla, y a qué velocidad de giro (este último parámetro está limitado por la
maquinaria que va acoplada al rotor, por ejemplo).
De forma preliminar, se puede calcular el área del rotor deseado partiendo de la relación:
� = �� ·1
2· · � · �
�
donde se debe tomar un valor aproximado de CP ( normalmente entre 0.3 y 0.35). Pero también
hay que tener en cuenta las pérdidas en la maquinaria que va conectada al rotor (multiplicador,
generador, eje con cojinetes, bomba de agua…). Cada componente tiene su propia eficiencia, por
lo que se debe multiplicar CP por cada una de estas eficiencias para conocer la potencia útil que se
va a generar.
Los materiales a emplear en la fabricación de rotores son muy variados. En principio, una pala
puede ser fabricada en madera, metal, telas y materiales compuestos, entre otros.
Los valores que determinan cuál de estos materiales es el adecuado varían para cada caso
específico.
Con diferencia, casi todos los nuevos diseños prefieren las ventajas de los materiales compuestos:
fibras de vidrio, carbono y kévlar, resinas de poliéster, viniléster y epoxi. La ventaja de utilizar los
tejidos de fibra es que se puede optimizar la estructura para resistir las cargas en las direcciones
apropiadas, aligerando además el peso total. Además, el coste de estos materiales está
descendiendo considerablemente, por lo que su empleo se generalizará en el futuro.
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 6 de 13
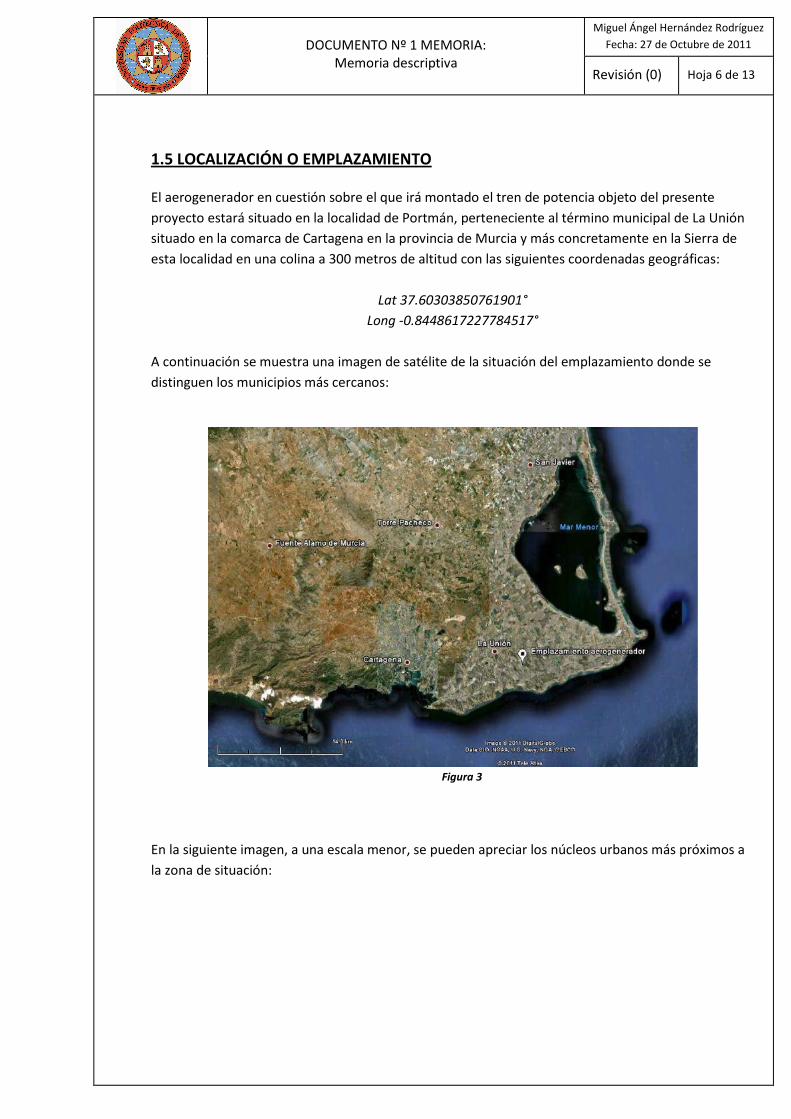
1.5 LOCALIZACIÓN O EMPLAZAMIENTO
El aerogenerador en cuestión sobre el que irá montado el tren de potencia objeto del presente
proyecto estará situado en la localidad de Portmán, perteneciente al término municipal de La Unión
situado en la comarca de Cartagena en la provincia de Murcia y más concretamente en la Sierra de
esta localidad en una colina a 300 metros de altitud con las siguientes coordenadas geográficas:
Lat 37.60303850761901°
Long -0.8448617227784517°
A continuación se muestra una imagen de satélite de la situación del emplazamiento donde se
distinguen los municipios más cercanos:
Figura 3
En la siguiente imagen, a una escala menor, se pueden apreciar los núcleos urbanos más próximos a
la zona de situación:
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 7 de 13
Figura 4
Los datos meteorológicos medios anuales en este emplazamiento son los que se muestran a
continuación
• Densidad del aire media ρ = 1,175 kg/m3 para unas condiciones de 15º C de temperatura y 0 m
de altitud (101.325 Pa de presión)
• Parámetro de forma de Weibull K = 2,133
• Parámetro de escala de Weibull C = 9,99 m/s
• Velocidad media del viento V = 8,62 m/s
• Altura del buje = 60 m
• Longitud de rugosidad = 0,05
• Clase de rugosidad = 1,5
1.6 ESTIMACIÓN DE LOS RECURSOS ENERGÉTICOS
En el apartado anterior se comentaron los datos arrojados por [1], en base a éstos datos se
procederá a determinar los recursos energéticos existentes en la zona para poder realizar una
estimación de la rentabilidad económica de un aerogenerador que integre el tren de potencia que se
detalla en éste proyecto.
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 8 de 13
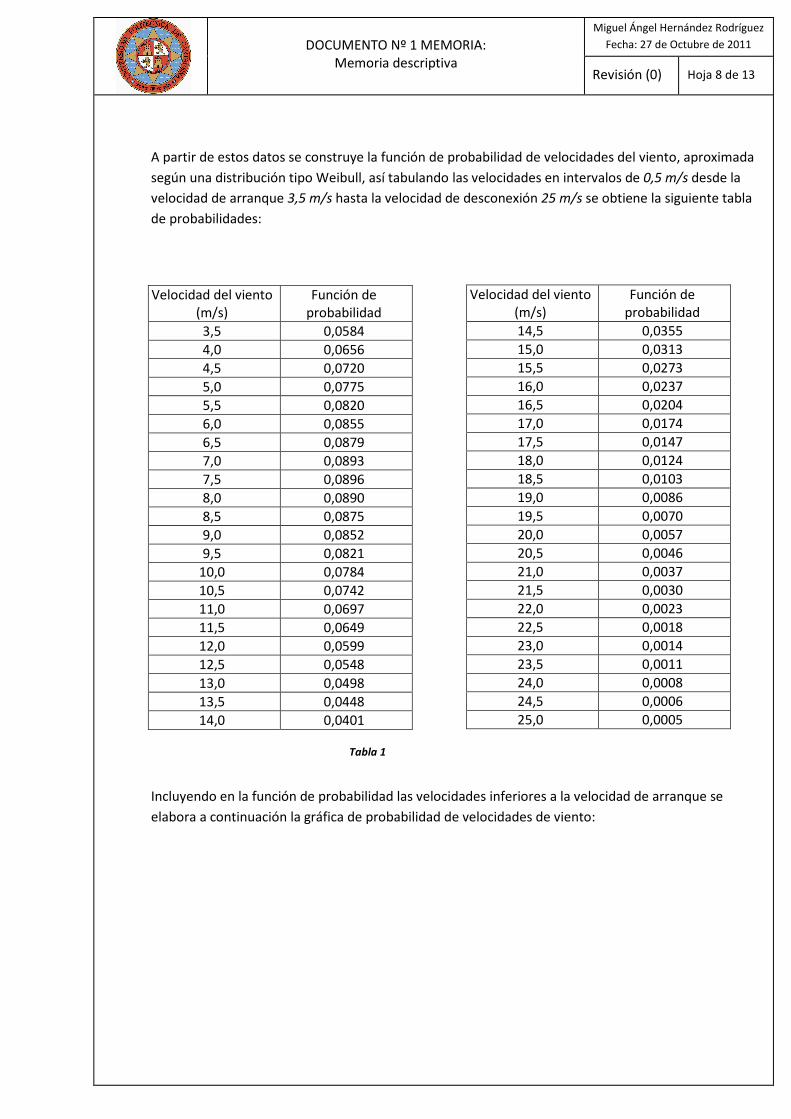
A partir de estos datos se construye la función de probabilidad de velocidades del viento, aproximada
según una distribución tipo Weibull, así tabulando las velocidades en intervalos de 0,5 m/s desde la
velocidad de arranque 3,5 m/s hasta la velocidad de desconexión 25 m/s se obtiene la siguiente tabla
de probabilidades:
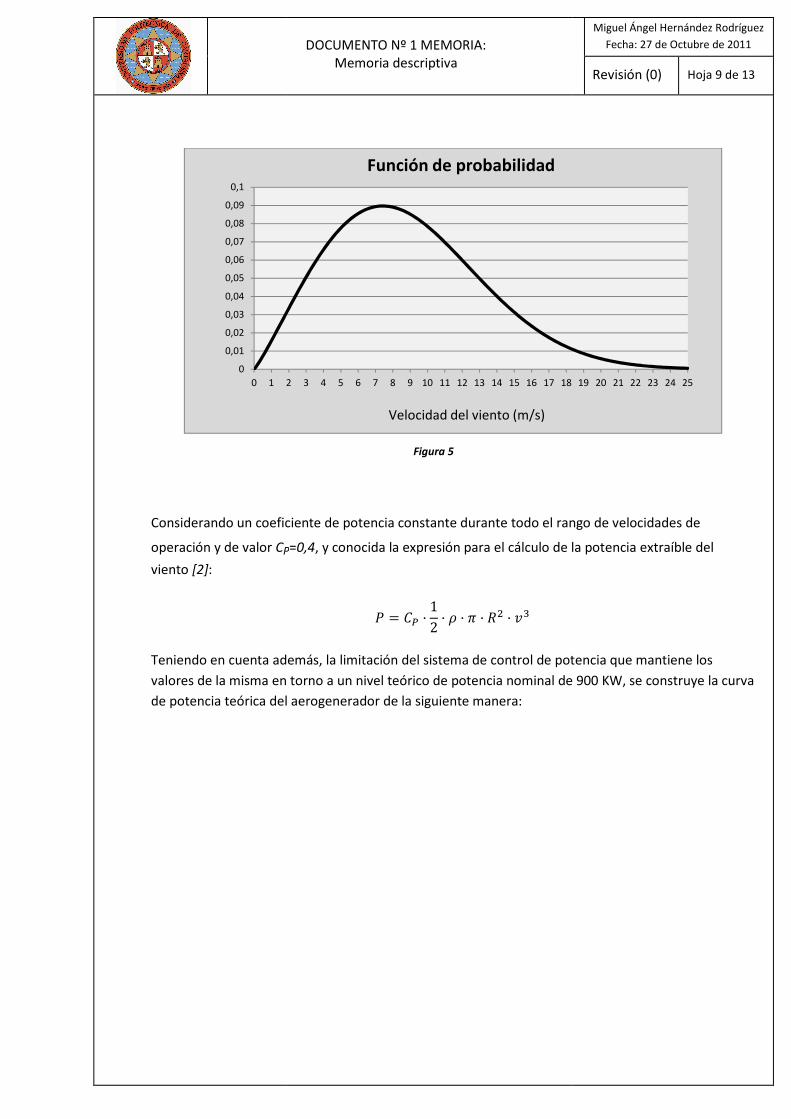
Incluyendo en la función de probabilidad las velocidades inferiores a la velocidad de arranque se
elabora a continuación la gráfica de probabilidad de velocidades de viento:
Velocidad del viento (m/s)
Función de probabilidad
14,5 0,0355
15,0 0,0313
15,5 0,0273
16,0 0,0237
16,5 0,0204
17,0 0,0174
17,5 0,0147
18,0 0,0124
18,5 0,0103
19,0 0,0086
19,5 0,0070
20,0 0,0057
20,5 0,0046
21,0 0,0037
21,5 0,0030
22,0 0,0023
22,5 0,0018
23,0 0,0014
23,5 0,0011
24,0 0,0008
24,5 0,0006
25,0 0,0005
Velocidad del viento (m/s)
Función de probabilidad
3,5 0,0584
4,0 0,0656
4,5 0,0720
5,0 0,0775
5,5 0,0820
6,0 0,0855
6,5 0,0879
7,0 0,0893
7,5 0,0896
8,0 0,0890
8,5 0,0875
9,0 0,0852
9,5 0,0821
10,0 0,0784
10,5 0,0742
11,0 0,0697
11,5 0,0649
12,0 0,0599
12,5 0,0548
13,0 0,0498
13,5 0,0448
14,0 0,0401
Tabla 1
Considerando un coeficiente de potencia constante durante todo el rango de velocidades de
operación y de valor CP
viento [2]:
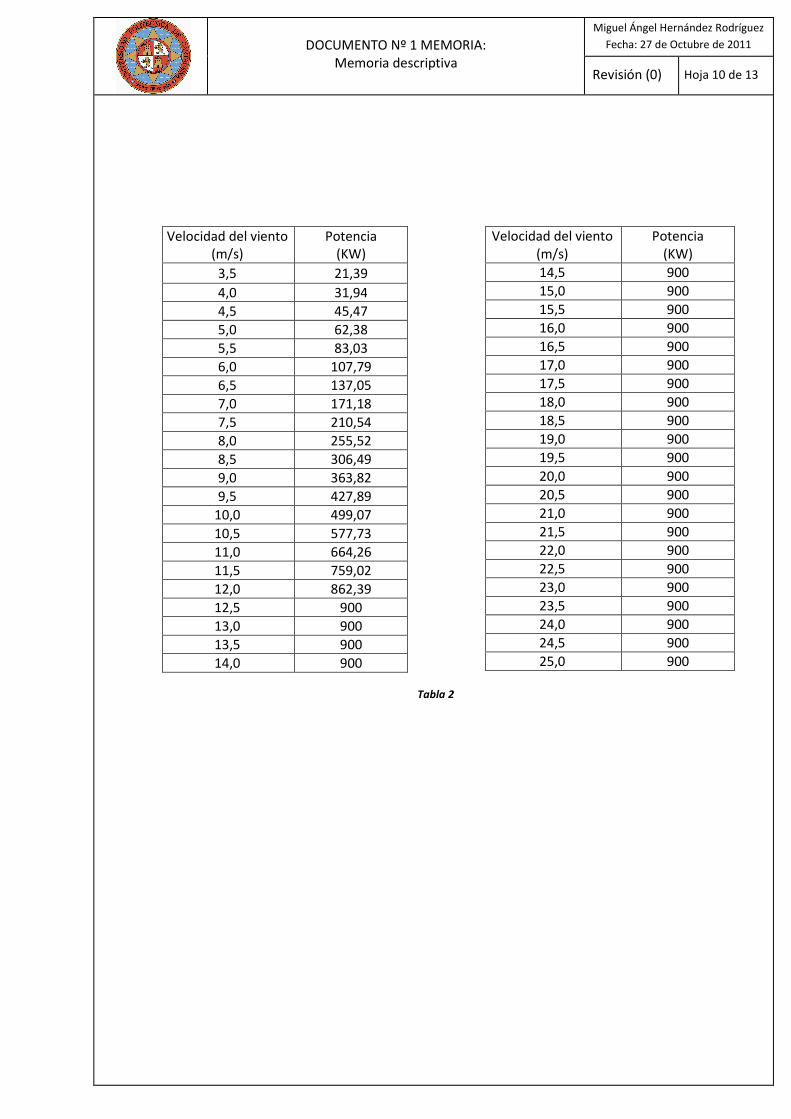
Teniendo en cuenta además, la limitación del sistema de control de potencia que mantiene los
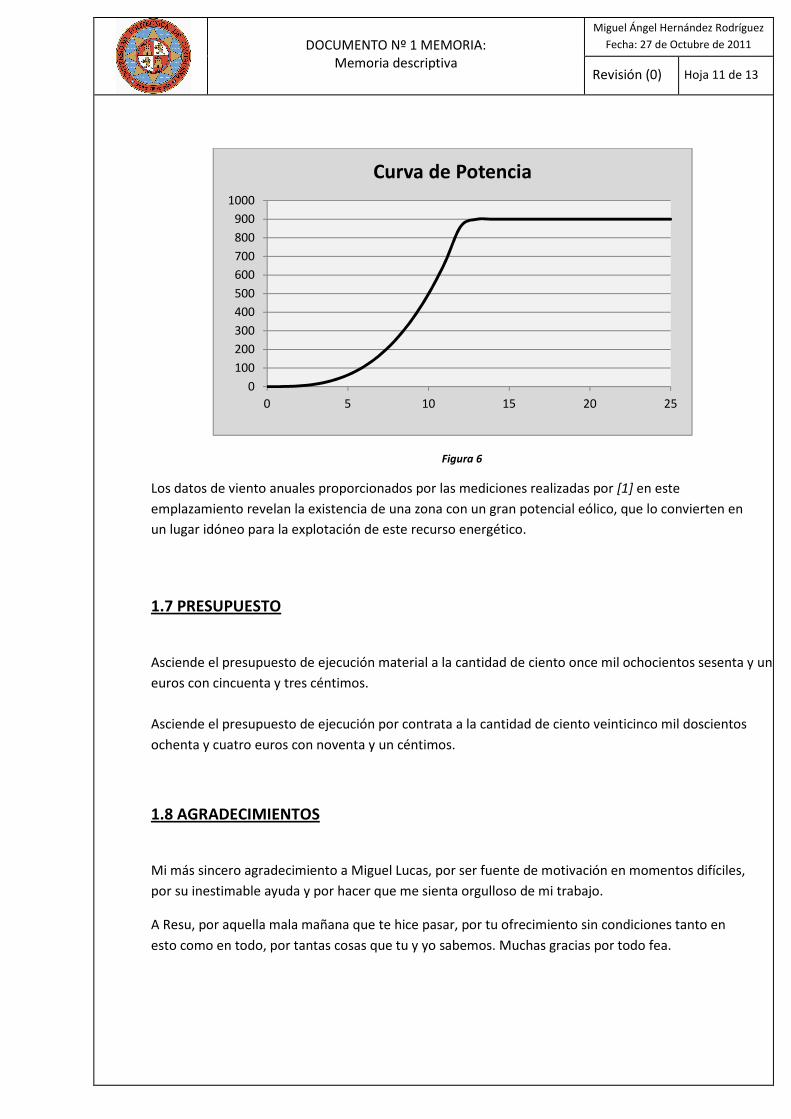
valores de la misma en torno a un nivel teórico de potencia nominal de 900 KW, se construye la curva
de potencia teórica del a
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
0,09
0,1
0 1 2
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Figura 5
Considerando un coeficiente de potencia constante durante todo el rango de velocidades de
P=0,4, y conocida la expresión para el cálculo de la potencia extraíble del
� = �� ·1
2� � � � �� � ��
Teniendo en cuenta además, la limitación del sistema de control de potencia que mantiene los
valores de la misma en torno a un nivel teórico de potencia nominal de 900 KW, se construye la curva
de potencia teórica del aerogenerador de la siguiente manera:
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Función de probabilidad
Velocidad del viento (m/s)
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 9 de 13
Considerando un coeficiente de potencia constante durante todo el rango de velocidades de
, y conocida la expresión para el cálculo de la potencia extraíble del
Teniendo en cuenta además, la limitación del sistema de control de potencia que mantiene los
valores de la misma en torno a un nivel teórico de potencia nominal de 900 KW, se construye la curva
19 20 21 22 23 24 25
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 10 de 13
Velocidad del viento (m/s)
Potencia (KW)
14,5 900
15,0 900
15,5 900
16,0 900
16,5 900
17,0 900
17,5 900
18,0 900
18,5 900
19,0 900
19,5 900
20,0 900
20,5 900
21,0 900
21,5 900
22,0 900
22,5 900
23,0 900
23,5 900
24,0 900
24,5 900
25,0 900
Tabla 2
Velocidad del viento (m/s)
Potencia (KW)
3,5 21,39
4,0 31,94
4,5 45,47
5,0 62,38
5,5 83,03
6,0 107,79
6,5 137,05
7,0 171,18
7,5 210,54
8,0 255,52
8,5 306,49
9,0 363,82
9,5 427,89
10,0 499,07
10,5 577,73
11,0 664,26
11,5 759,02
12,0 862,39
12,5 900
13,0 900
13,5 900
14,0 900
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 11 de 13
Figura 6
Los datos de viento anuales proporcionados por las mediciones realizadas por [1] en este
emplazamiento revelan la existencia de una zona con un gran potencial eólico, que lo convierten en
un lugar idóneo para la explotación de este recurso energético.
1.7 PRESUPUESTO
Asciende el presupuesto de ejecución material a la cantidad de ciento once mil ochocientos sesenta y un
euros con cincuenta y tres céntimos.
Asciende el presupuesto de ejecución por contrata a la cantidad de ciento veinticinco mil doscientos
ochenta y cuatro euros con noventa y un céntimos.
1.8 AGRADECIMIENTOS
Mi más sincero agradecimiento a Miguel Lucas, por ser fuente de motivación en momentos difíciles,
por su inestimable ayuda y por hacer que me sienta orgulloso de mi trabajo.
A Resu, por aquella mala mañana que te hice pasar, por tu ofrecimiento sin condiciones tanto en
esto como en todo, por tantas cosas que tu y yo sabemos. Muchas gracias por todo fea.
0
100
200
300
400
500
600
700
800
900
1000
0 5 10 15 20 25
Curva de Potencia
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 12 de 13
1.9 DOCUMENTOS DE LOS QUE CONSTA
El proyecto está compuesto por los siguientes documentos:
• Documento nº 1: Memoria.
o Memoria descriptiva.
o Anejo nº1: Cálculos justificativos.
• Documento nº 2: Planos.
• Documento nº 3: Pliego de condiciones.
• Documento nº 4: Presupuesto.
o Estado de mediciones.
o Cuadro de precios unitarios.
o Presupuesto general.
1.10 BIBLIOGRAFÍA
[1] Instituto para la diversificación y ahorro de la energía IDAE. Ministerio de Industria, Turismo y
Comercio.
[2] “Sistemas eólicos de producción de energía eléctrica”. J.L Rodríguez Amenedo, J.C. Burgos
Díaz, S. Arnalte Gómez. Editorial Rueda, S.L., Madrid - 2003.
[3] “Diseño de elementos de Máquinas”. Robert L. Mott, Virgilio González y Pozo. Editorial Pearson
Educación - 2006.
[4] ANSI/AGMA/AWEA 6006-A03 “Standard for Design and Specification of Gearboxes for Wind
Turbines”. American Gear Manufacturers Association, Virginia - 2004.
[5] UNE 18001.
[6] IEC 61400-1.
[7] “Wind turbines. Fundamental, Technologies, Application, Economics 2ª Edición”. Erich Hau.
Editorial Springer. Münich - 2000.
[8] “Mechanical Engineer’s Handbook”. Department of Mechanical Engineering, Auburn
University. Auburn, Alabama - 2001.
[9] “Wind Energy Explained, Theory, design and application”. Manwell J.F., McGowan J.G. and
Rogers A.L. John Wiley & Sons, Ltd, Chichester – 2002. [10] “Wind energy handbook”. Burton T., Sharpe D., Jenkins N. and Bossanyi E. John Wiley
& Sons, Ltd, Chichester – 2001.
[11] “Aceros de alta resistencia”. Jose Antonio Garcia Poggio. Editorial Montecorvo. Madrid - 1965.
[12] UNE-EN 61400-2 2007.
[13] “Elementos de máquinas”. Bernard J. Hamrock, Bo O. Jacobson, Steven R. Schmid. Editorial
McGraw Hill. México - 2.000.
DOCUMENTO Nº 1 MEMORIA:
Memoria descriptiva
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 13 de 13
[14] “Diseño en ingeniería mecánica”. Joseph F.Shigley, Larry D. Mitchell. Editorial McGraw Hill,
México – 1.983.
[15] “Tratado sobre automóviles”. José Font Mezquita, Juan F. Dols Ruiz. Universidad Politécnica de
Valencia. Valencia – 2004.
[16] “Manual de Diseño de Estructuras en Acero 2ª Edición”. ICHA. 2008.
[17] AGMA 2001-C9: “Fundamental rating factors and calculation methods for involute spur and
helical gear teeth”. American Gears Manufacturers Association, Virginia – 2001.
1.11 CONCLUSIÓN A LA MEMORIA
Teniendo en cuenta que para la redacción del proyecto industrial “Diseño del conjunto eje-
acoplamiento-reductora epicicloidal de un aerogenerador eólico” se han tenido en cuenta las
prescripciones de la legislación vigente y que de acuerdo con ellas se han cubierto los objetivos
requeridos por el peticionario se solicita la aprobación por parte de los organismos oficiales, dándolo
por terminado.
El ingeniero Técnico Industrial:
Miguel Ángel Hernández Rodríguez
Cartagena, 27 de Octubre de 2011
UNIVERSIDAD POLITÉCNICA DE CARTAGENA
E.T.S.I.I
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA Diseño del conjunto eje-acoplamiento-reductora epicicloidal
de un generador eólico
DOCUMENTO Nº 1: MEMORIA
Anejo nº 1. Cálculos justificativos
Peticionario: Departo. de Ingeniería Mecánica, Universidad Politécnica de Cartagena
Nombre: Miguel Ángel Hernández Rodríguez Lugar: Cartagena
Fecha: 27 de Octubre de 2011
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 0 de 114
ÍNDICE
1.1 ESTUDIO DE CARGAS .......................................................................................... 1
1.2 CÁLCULO DE LA VELOCIDAD DEL ROTOR ............................................................. 4
1.3 DIMENSIONADO EJE DE BAJA ............................................................................. 4
1.3.1 Determinación de las cargas sobre el eje ............................................................... 4
1.3.2 Diagramas de esfuerzos ........................................................................................ 5
1.3.3 Dimensionado a carga estática .............................................................................. 8
1.3.4 Comprobación a fatiga ........................................................................................ 12
1.4 CÁLCULO DE RELACIONES DE TRANSMISIÓN, NÚMERO DE DIENTES Y DISTANCIA
ENTRE CENTROS .................................................................................................... 18
1.4.1 Cálculo segunda etapa ........................................................................................ 20
1.4.2 Cálculo primera etapa ......................................................................................... 23
1.5 DIMENSIONADO 1ª ETAPA MULTIPLICADORA .................................................. 26
1.5.1 Cálculo de fuerzas en los engranajes ................................................................... 26
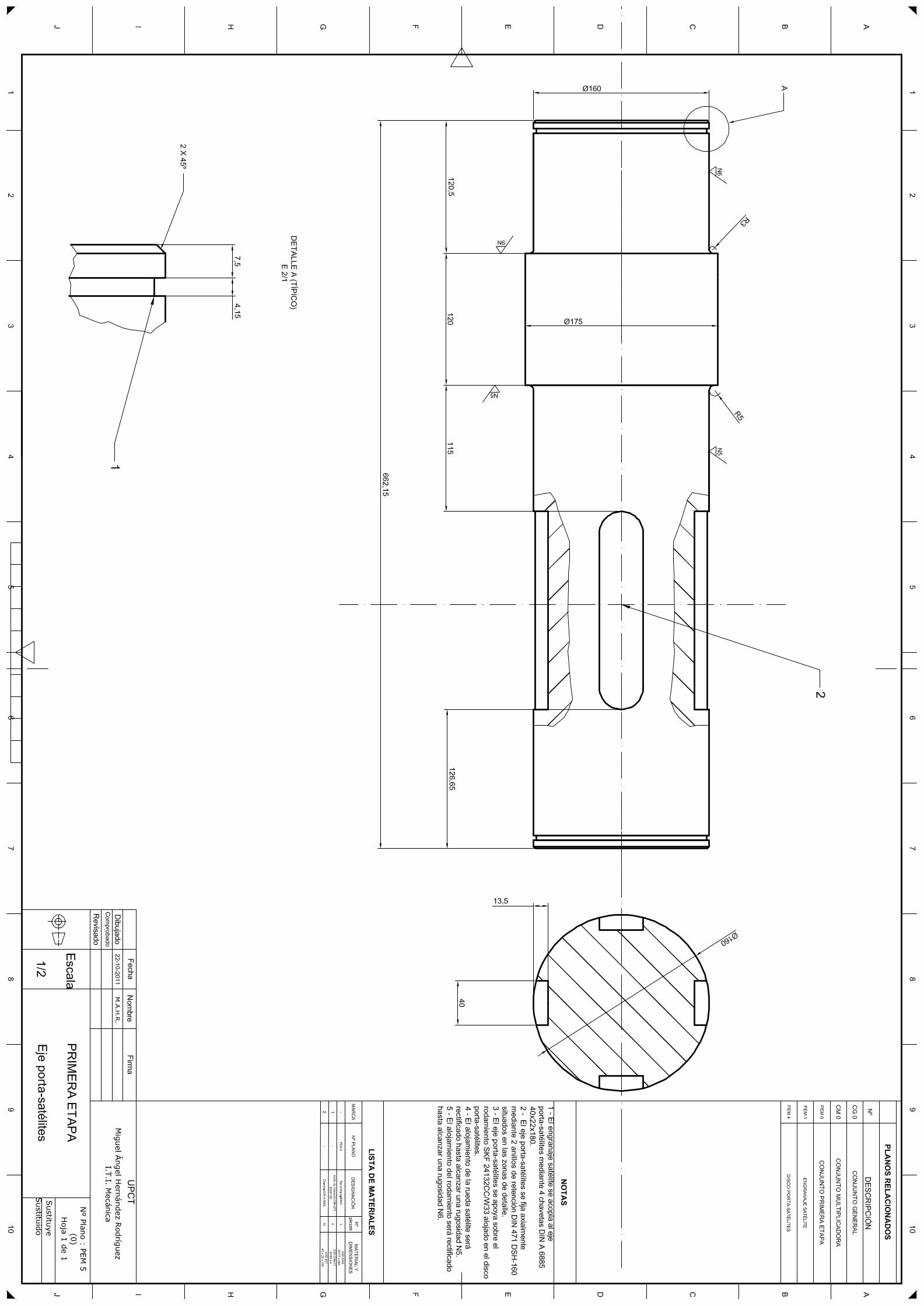
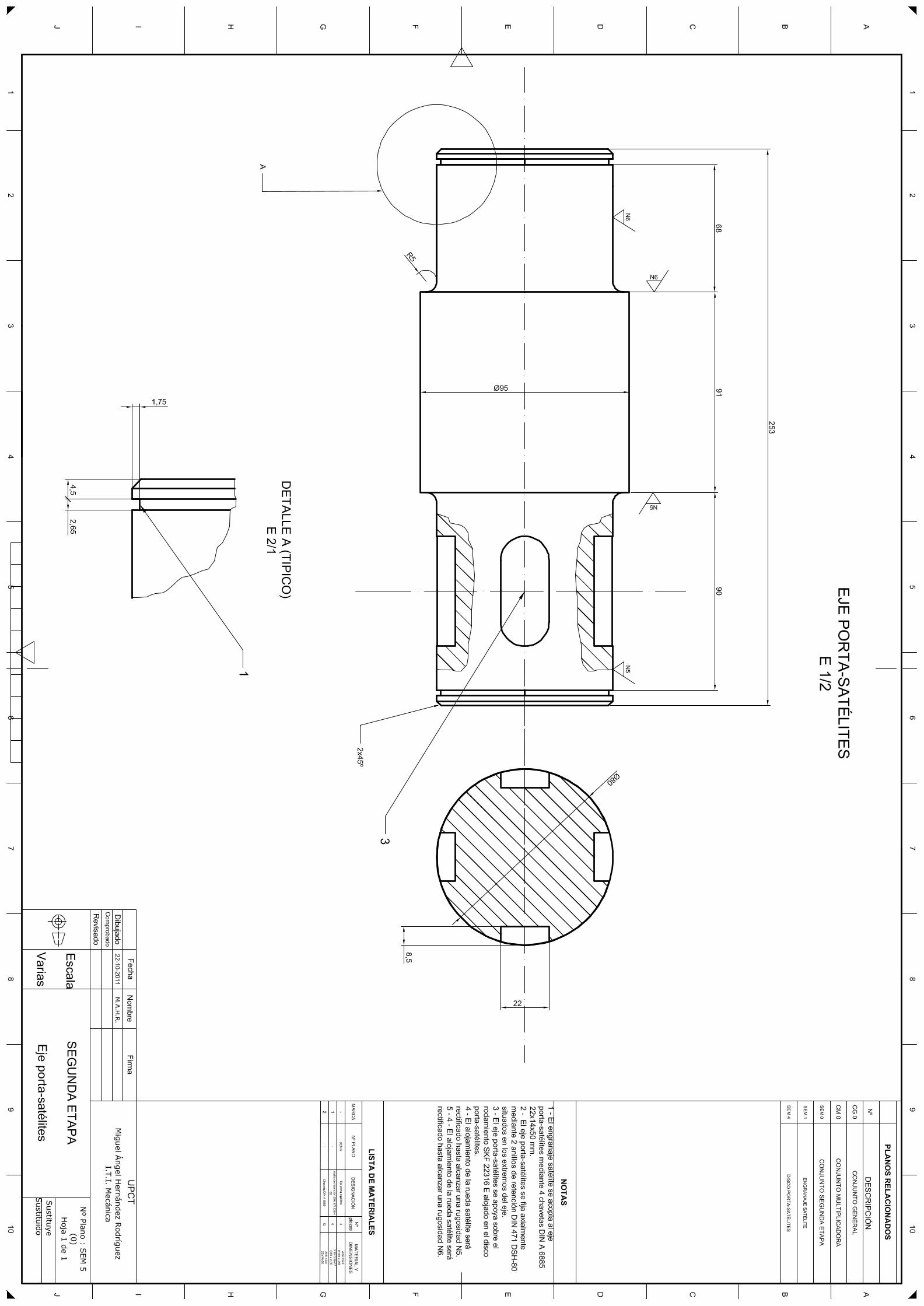
1.5.2 Dimensionado del eje porta-satélites .................................................................. 28
1.5.3 Determinación del ancho de cara de los engranajes ............................................ 36
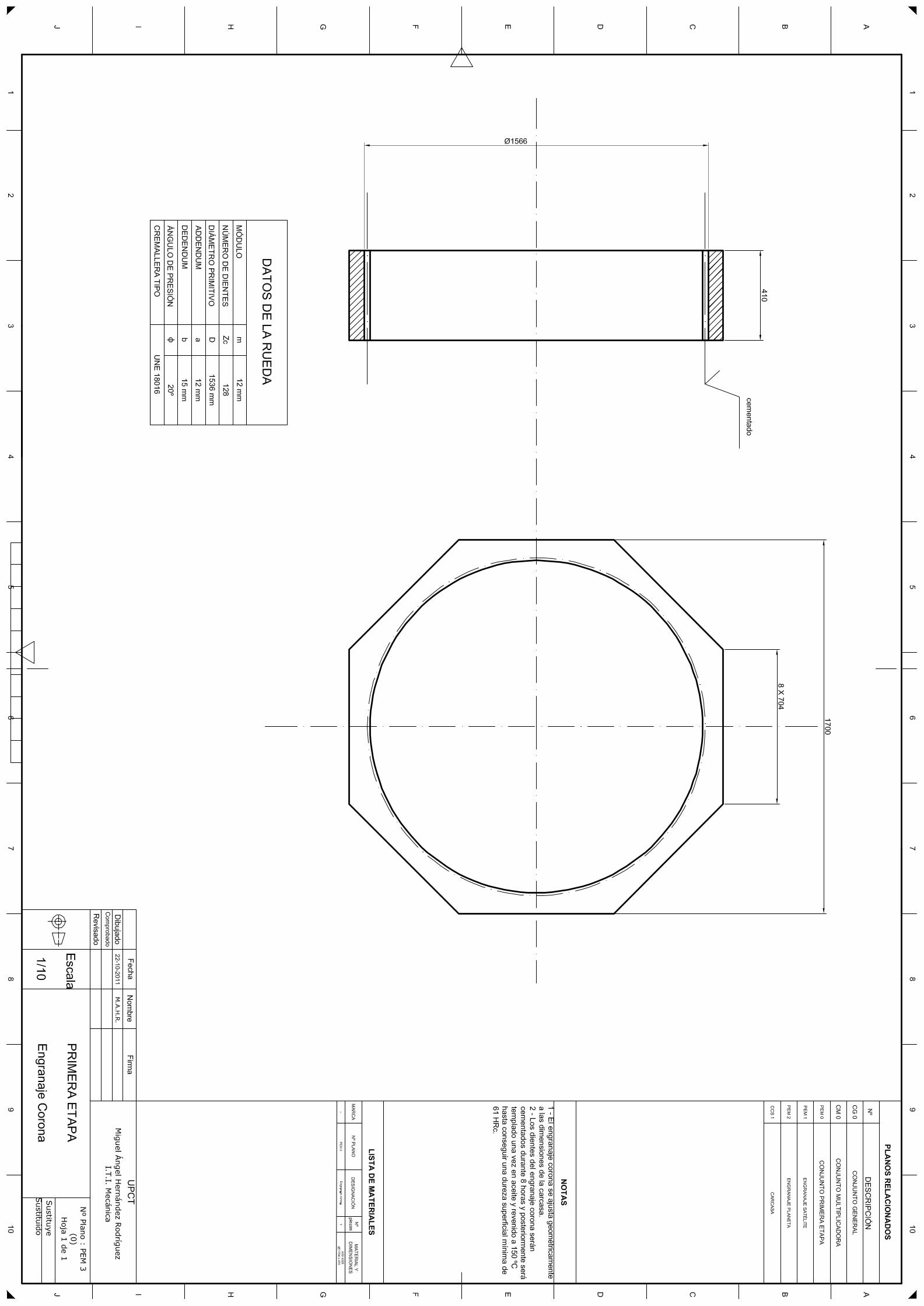
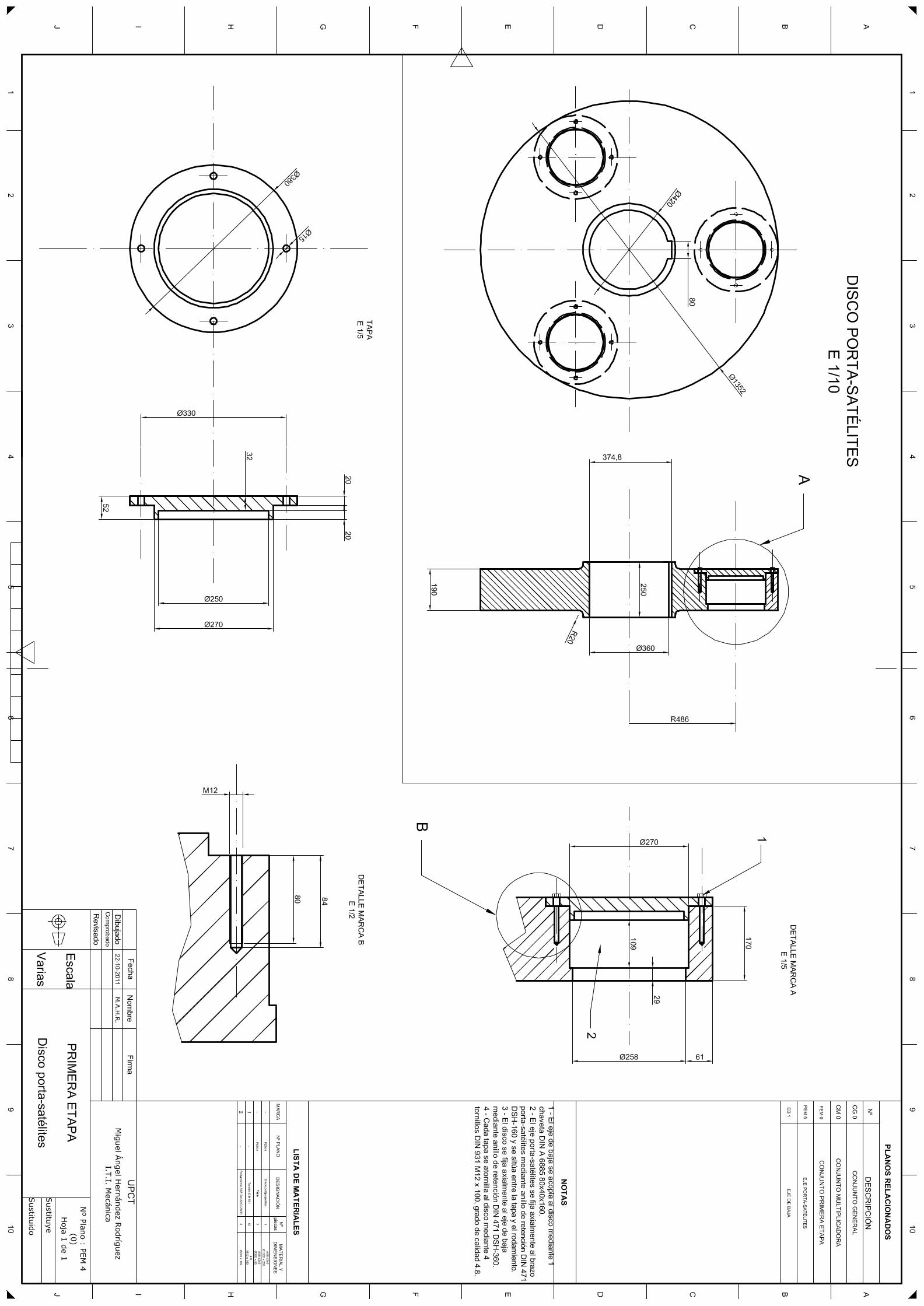
1.5.4 Dimensionado del disco porta-satélites ............................................................... 46
1.6 DIMENSIONADO 2ª ETAPA MULTIPLICADORA .................................................. 51
1.6.1 Cálculo de fuerzas en los engranajes ................................................................... 51
1.6.2 Dimensionado del eje porta-satélites .................................................................. 53
1.6.3 Determinación del ancho de cara de los engranajes ............................................ 61
1.6.4 Dimensionado del disco porta-satélites ............................................................... 66
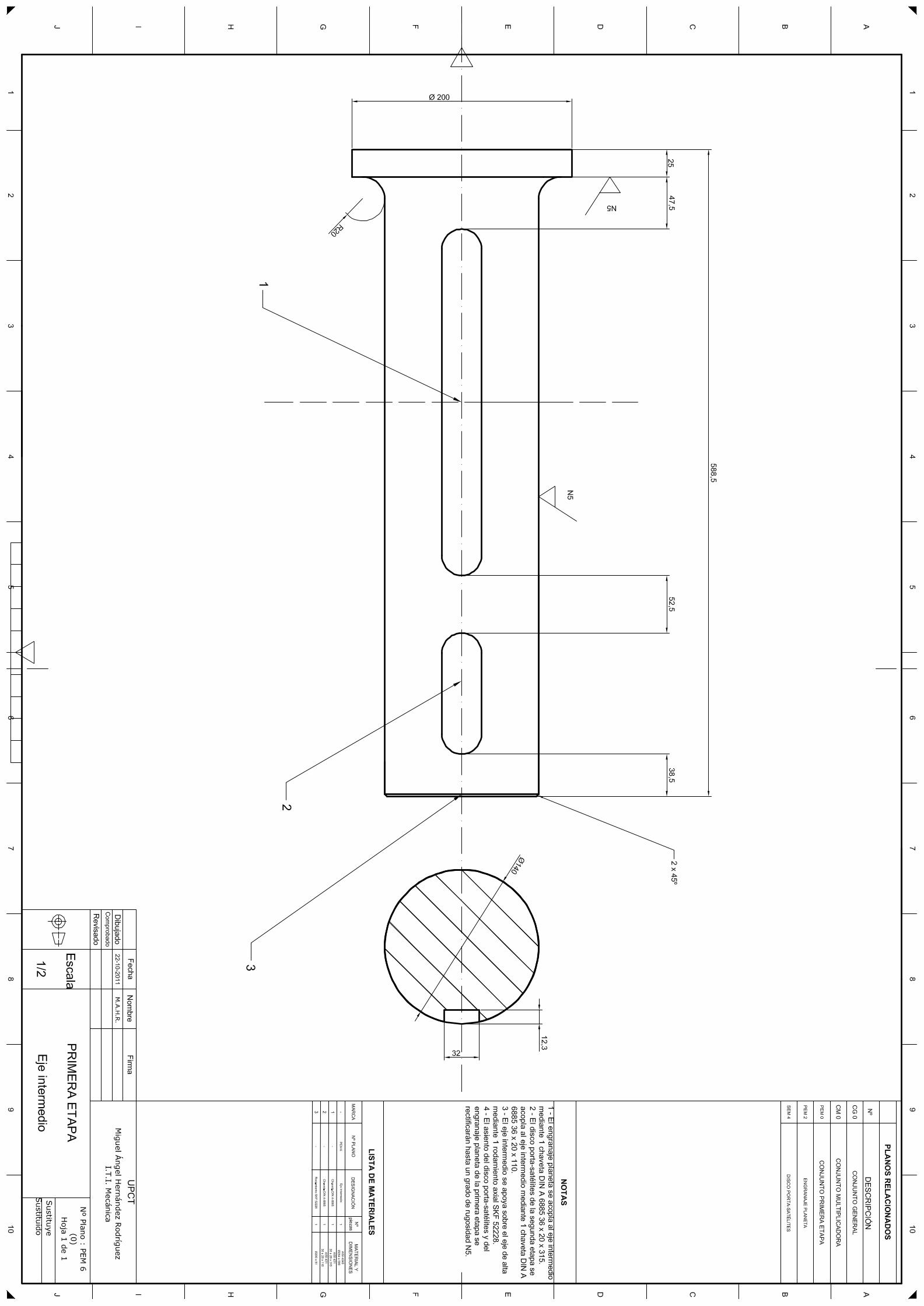
1.7 DIMENSIONADO EJE INTERMEDIO .................................................................... 70
1.7.1 Determinación de las cargas sobre el eje ............................................................. 70
1.7.2 Dimensionado a carga estática ............................................................................ 70
1.7.3 Comprobación a fatiga ........................................................................................ 73
1.8 DIMENSIONADO EJE ALTA VELOCIDAD ............................................................. 77
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 0 de 114
1.8.1 Determinación de las cargas sobre el eje ............................................................. 77
1.8.2 Diagramas de esfuerzos ...................................................................................... 77
1.8.3 Dimensionado a carga estática ............................................................................ 78
1.8.4 Comprobación a fatiga ........................................................................................ 82
1.9 SELECCIÓN DE RODAMIENTOS.......................................................................... 82
1.9.1 Dimensionado y duración de servicio .............................................................. 82
1.9.2 Rodamiento principal del eje de baja .............................................................. 85
1.9.3 Rodamiento del lado de la caja multiplicadora ................................................ 88
1.9.4 Rodamientos del eje de los satélites de la primera etapa ................................ 90
1.9.5 Rodamientos del eje de los satélites de la segunda etapa ............................... 92
1.9.6 Rodamiento de fijación axial........................................................................... 95
1.9.7 Rodamiento del eje de alta velocidad ............................................................. 97
1.10 DIMENSIONADO DISCO DE FRENO .................................................................. 99
1.10.1 Modelo de desgaste uniforme ...................................................................... 99
1.10.2 Selección del disco de freno/acoplamiento eje de alta ................................ 102
1.10.3 Selección de la pinza de freno ..................................................................... 103
1.11 CÁLCULO DEL ESPESOR DE LA CARCASA ........................................................ 104
1.11.1 Cálculo de las cargas sobre la carcasa .......................................................... 105
1.11.2 Cálculo del espesor de la chapa ................................................................... 108
1.12 CÁLCULO DEL ACOPLAMIENTO CON EL BUJE ................................................. 111
1.12.1 Selección del material ................................................................................. 111
1.12.2 Cálculo de cargas en los tornillos ................................................................ 112
1.12.3 Cálculo de seguridad a cortadura ................................................................ 112
1.12.4 Cálculo de seguridad a flexión ..................................................................... 113
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 1 de 114
1.1 ESTUDIO DE CARGAS
Habrá varios factores que afecten a la magnitud de las cargas actuantes sobre un aerogenerador: la
posición de las palas y la velocidad con que incide el viento son los más significativos.
En primer lugar se expondrán ciertas consideraciones de diseño que se han tenido en cuenta a la
hora de realizar los cálculos de dimensionado de los elementos del tren de potencia.
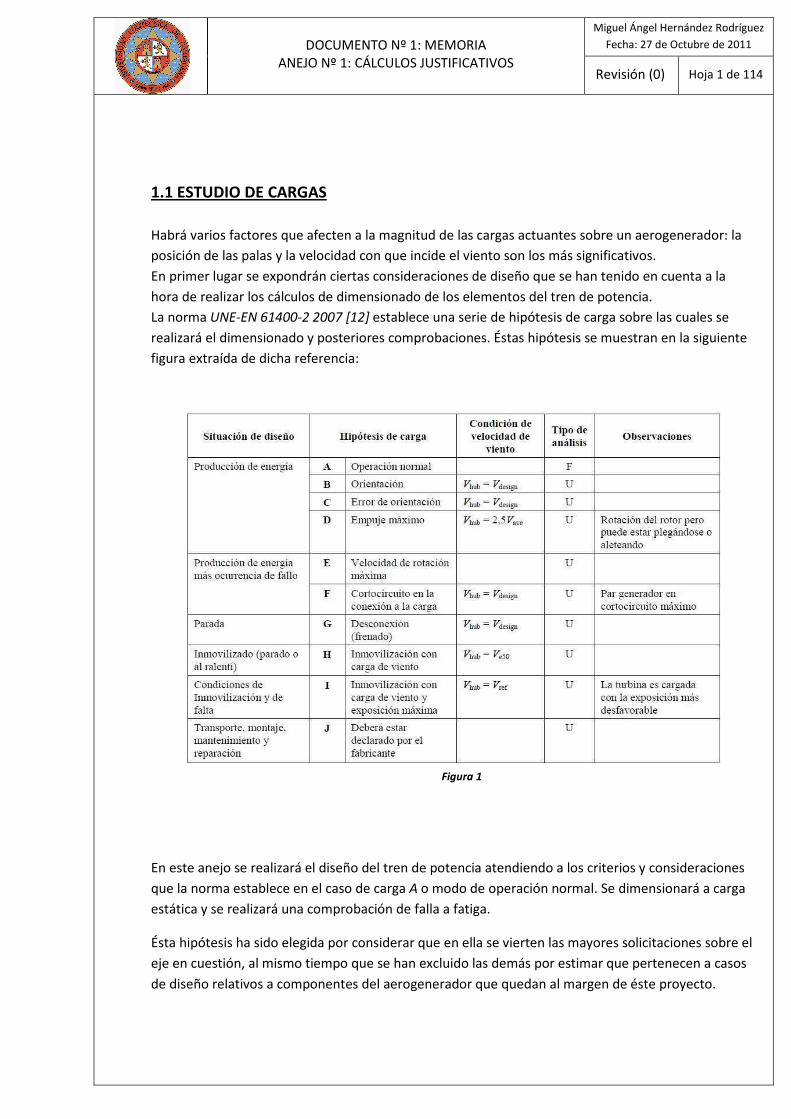
La norma UNE-EN 61400-2 2007 [12] establece una serie de hipótesis de carga sobre las cuales se
realizará el dimensionado y posteriores comprobaciones. Éstas hipótesis se muestran en la siguiente
figura extraída de dicha referencia:
Figura 1
En este anejo se realizará el diseño del tren de potencia atendiendo a los criterios y consideraciones
que la norma establece en el caso de carga A o modo de operación normal. Se dimensionará a carga
estática y se realizará una comprobación de falla a fatiga.
Ésta hipótesis ha sido elegida por considerar que en ella se vierten las mayores solicitaciones sobre el
eje en cuestión, al mismo tiempo que se han excluido las demás por estimar que pertenecen a casos
de diseño relativos a componentes del aerogenerador que quedan al margen de éste proyecto.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 2 de 114
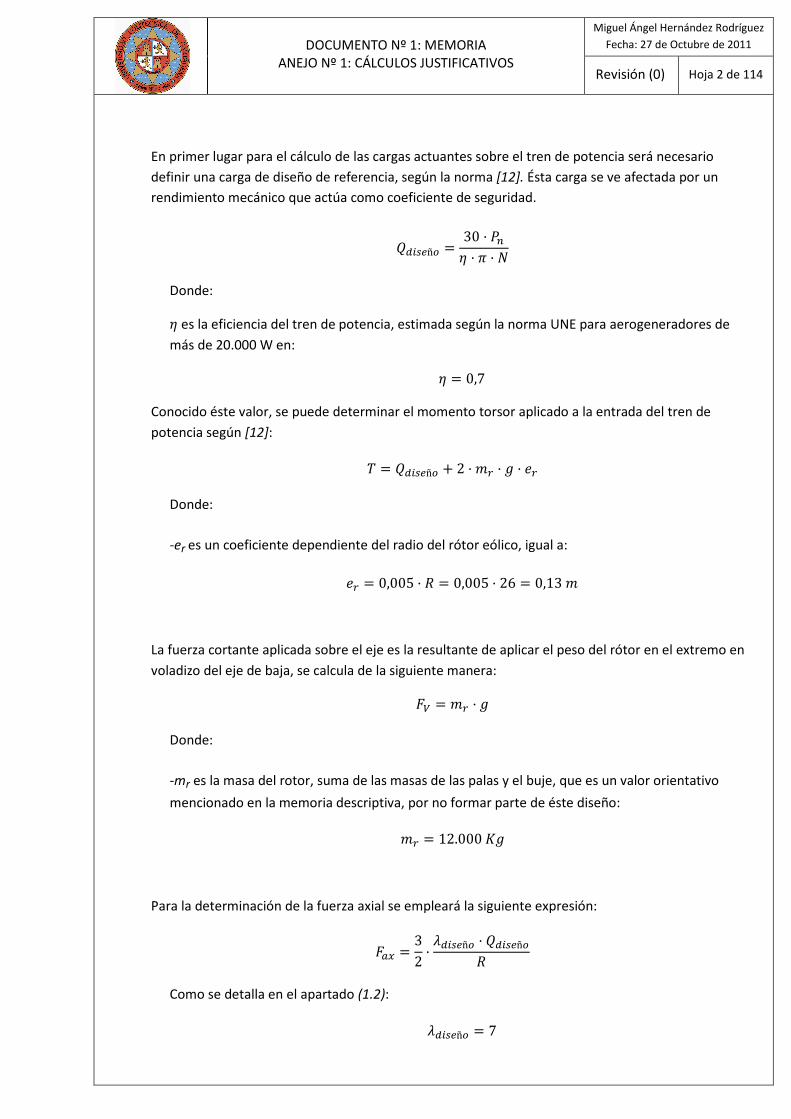
En primer lugar para el cálculo de las cargas actuantes sobre el tren de potencia será necesario
definir una carga de diseño de referencia, según la norma [12]. Ésta carga se ve afectada por un
rendimiento mecánico que actúa como coeficiente de seguridad.
�����ñ� = 30 · � � · � · �
Donde: � es la eficiencia del tren de potencia, estimada según la norma UNE para aerogeneradores de
más de 20.000 W en: � = 0,7
Conocido éste valor, se puede determinar el momento torsor aplicado a la entrada del tren de
potencia según [12]: � = �����ñ� + 2 · �� · � · ��
Donde:
-er es un coeficiente dependiente del radio del rótor eólico, igual a: �� = 0,005 · � = 0,005 · 26 = 0,13 �
La fuerza cortante aplicada sobre el eje es la resultante de aplicar el peso del rótor en el extremo en
voladizo del eje de baja, se calcula de la siguiente manera: � = �� · �
Donde:
-mr es la masa del rotor, suma de las masas de las palas y el buje, que es un valor orientativo
mencionado en la memoria descriptiva, por no formar parte de éste diseño: �� = 12.000 "�
Para la determinación de la fuerza axial se empleará la siguiente expresión:
�#$ = 32 · %����ñ� · �����ñ��
Como se detalla en el apartado (1.2): %����ñ� = 7
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 3 de 114
Para la determinación del momento flector aplicado sobre el eje de baja se emplea la siguiente
fórmula recogida de [12]:
&' = 2 · �� · � · (�) + �6 · �#$
De donde son conocidos los valores de todos los miembros a excepción de la distancia en metros
desde el buje hasta el primer rodamiento Lrb, que se fija en (1.3).
Según [12] se deben aplicar unos coeficientes de seguridad sobre la resistencia de fluencia del
material para el dimensionamiento de los elementos del tren a carga estática.
La norma distingue dos coeficientes, coeficiente de seguridad parcial para materiales γm y coeficiente
de seguridad parcial para cargas γf. Se expone el método de obtención de ambos coeficientes a
continuación:
-Coeficiente de seguridad parcial para materiales:
Las propiedades del material elegido se basan en ensayos de probeta, uno de los casos que
contempla la norma, que denomina como “caracterización mínima” y para el cual establece un valor
de: *+ = 3,0
-Coeficiente de seguridad parcial para cargas:
El método de obtención de las cargas actuantes en el eje se engloba dentro del caso que la norma
denota como “Cálculo de cargas simple”, para el que establece un valor del coeficiente de: *' = 3,0
La norma establece que éstos coeficientes se deben aplicar, como se ha apuntado anteriormente,
sobre la resistencia característica del material, es decir, la resistencia a fluencia del mismo por
tratarse del criterio de carga estática.
,#�+ = -.*+ · *'
Con las expresiones de cálculo anteriores se procederá en este anejo a determinar las cargas sobre
los elementos que componen el tren de potencia para realizar su diseño atendiendo a criterios de
solicitación estática y falla por fatiga.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 4 de 114
1.2 CÁLCULO DE LA VELOCIDAD DEL ROTOR
A continuación se muestran los datos que permiten calcular la velocidad a la que girará el rotor
eólico, que se tomará como parámetro de diseño a la hora de realizar el cálculo de las relaciones de
transmisión de la multiplicadora como velocidad de entrada.
Así se tienen el parámetro de diseño λ conocido como “Velocidad específica” o “TSR” por sus siglas
en inglés (Tip Speed Ratio) aportado por el fabricante de los álabes, el diámetro del rotor y la
velocidad media anual del emplazamiento:
λdiseño= 7
Drotor= 52 m
Vm= 8,62 m/s
mediante la definición del parámetro TSR como la relación entre la velocidad en la punta de la pala y
la velocidad del viento, se calcula la velocidad de rotación del eje de baja de la siguiente manera:
N = λ����ñ� · 60 · 1+� · 2��3�� (5. 6. 5)
� = 22,16 rpm
1.3 DIMENSIONADO EJE DE BAJA
El eje de baja velocidad está situado entre el centro del buje y la entrada a la multiplicadora. Deberá
soportar las fuerzas debidas a la acción del viento contra las palas del aerogenerador, así como el
peso de éstas.
1.3.1 Determinación de las cargas sobre el eje
La obtención de las expresiones que permiten determinar las cargas sobre el eje de baja fueron
introducidas en (1.1) y no serán explicadas en éste apartado.
-Fuerza cortante � = 12.000 · 9,81 = 117.720 �
-Fuerza axial:
�#$ = 32 · 7 · 554.046,3426 = 223.749,48 �
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 5 de 114
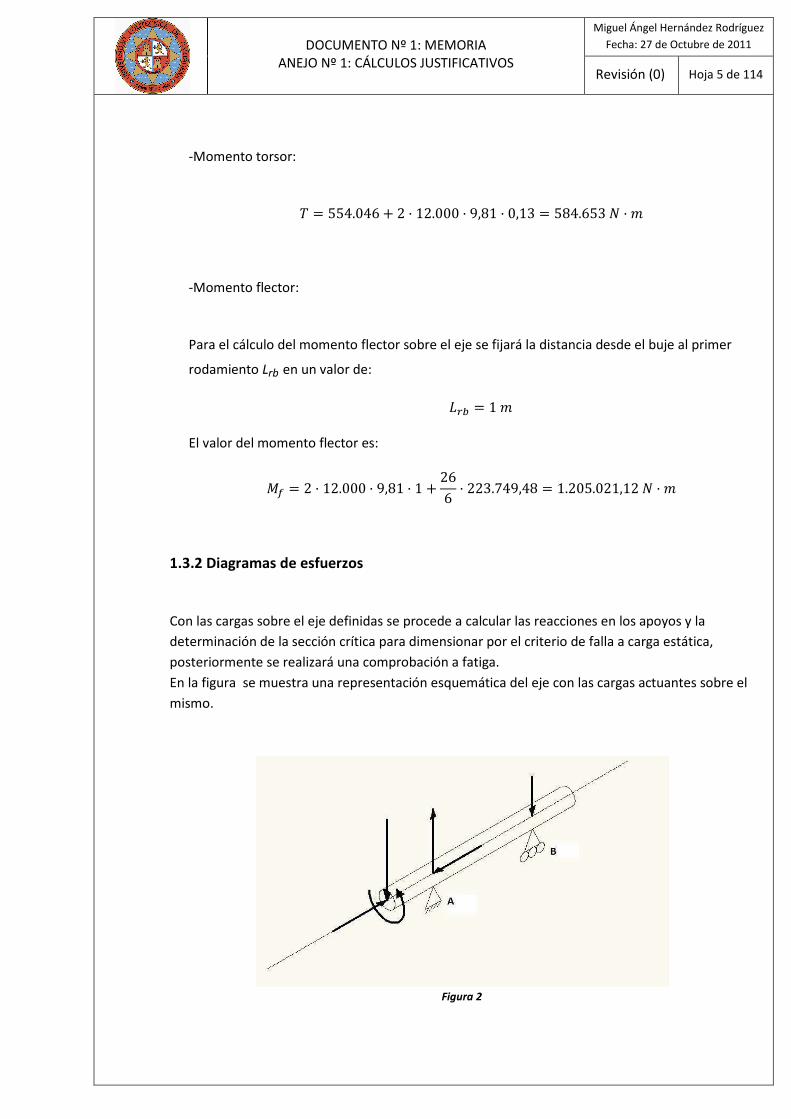
-Momento torsor:
� = 554.046 + 2 · 12.000 · 9,81 · 0,13 = 584.653 � · �
-Momento flector:
Para el cálculo del momento flector sobre el eje se fijará la distancia desde el buje al primer
rodamiento Lrb en un valor de: (�) = 1 �
El valor del momento flector es:
&' = 2 · 12.000 · 9,81 · 1 + 266 · 223.749,48 = 1.205.021,12 � · �
1.3.2 Diagramas de esfuerzos
Con las cargas sobre el eje definidas se procede a calcular las reacciones en los apoyos y la
determinación de la sección crítica para dimensionar por el criterio de falla a carga estática,
posteriormente se realizará una comprobación a fatiga.
En la figura se muestra una representación esquemática del eje con las cargas actuantes sobre el
mismo.
Figura 2
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 6 de 114
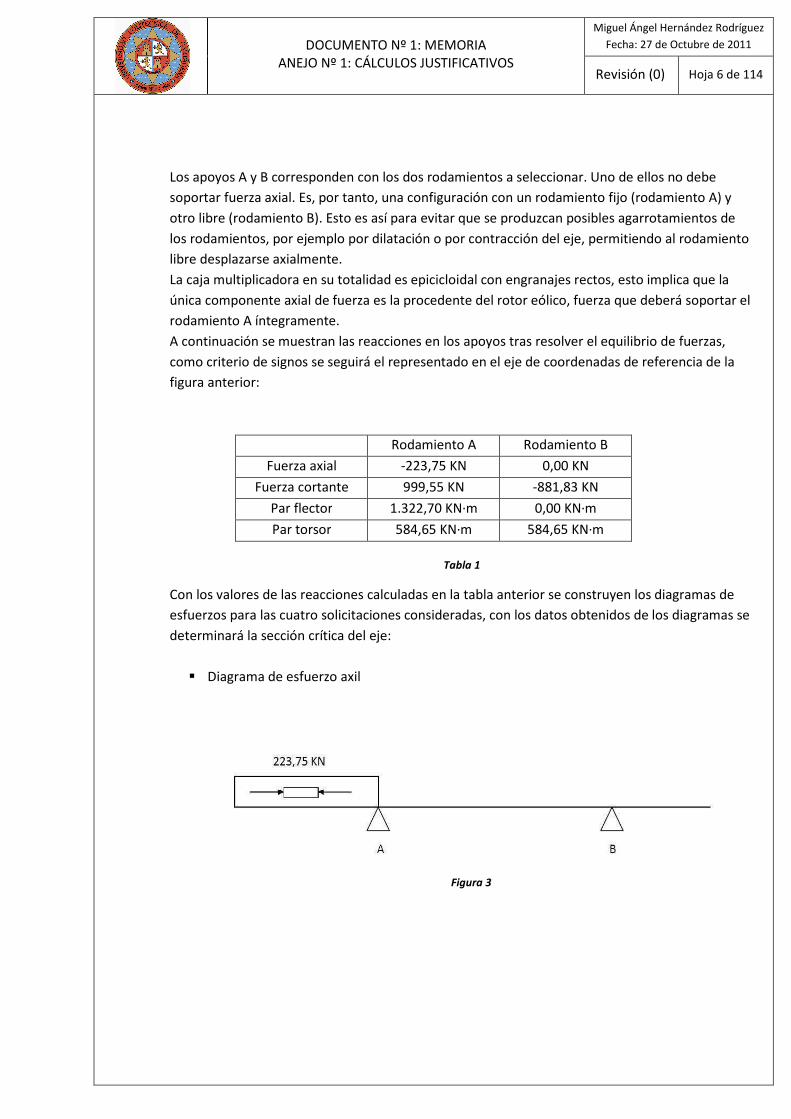
Los apoyos A y B corresponden con los dos rodamientos a seleccionar. Uno de ellos no debe
soportar fuerza axial. Es, por tanto, una configuración con un rodamiento fijo (rodamiento A) y
otro libre (rodamiento B). Esto es así para evitar que se produzcan posibles agarrotamientos de
los rodamientos, por ejemplo por dilatación o por contracción del eje, permitiendo al rodamiento
libre desplazarse axialmente.
La caja multiplicadora en su totalidad es epicicloidal con engranajes rectos, esto implica que la
única componente axial de fuerza es la procedente del rotor eólico, fuerza que deberá soportar el
rodamiento A íntegramente.
A continuación se muestran las reacciones en los apoyos tras resolver el equilibrio de fuerzas,
como criterio de signos se seguirá el representado en el eje de coordenadas de referencia de la
figura anterior:
Rodamiento A Rodamiento B
Fuerza axial -223,75 KN 0,00 KN
Fuerza cortante 999,55 KN -881,83 KN
Par flector 1.322,70 KN·m 0,00 KN·m
Par torsor 584,65 KN·m 584,65 KN·m
Tabla 1
Con los valores de las reacciones calculadas en la tabla anterior se construyen los diagramas de
esfuerzos para las cuatro solicitaciones consideradas, con los datos obtenidos de los diagramas se
determinará la sección crítica del eje:
� Diagrama de esfuerzo axil
Figura 3
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 7 de 114
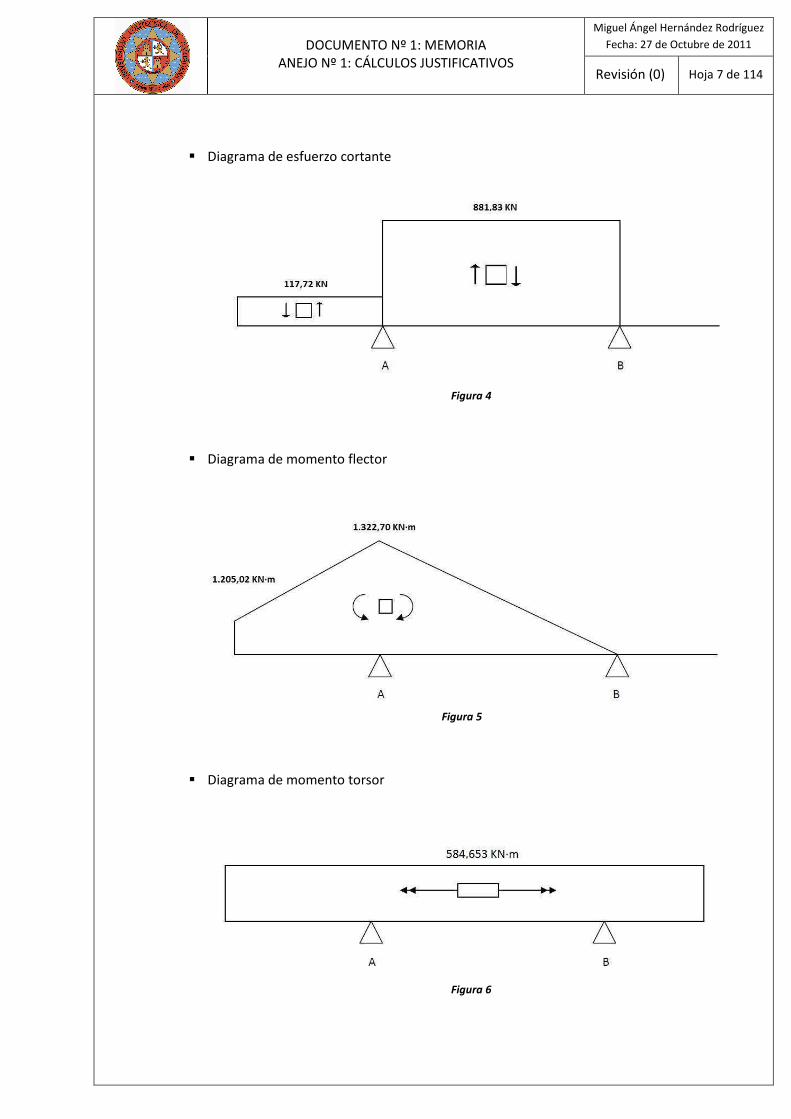
� Diagrama de esfuerzo cortante
Figura 4
� Diagrama de momento flector
Figura 5
� Diagrama de momento torsor
Figura 6
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 8 de 114
Analizando los diagramas de esfuerzos se observa que la sección A es la que soporta las mayores
solicitaciones, por lo tanto será ésta la sección crítica sobre la cual se realizarán los cálculos de
dimensionamiento.
1.3.3 Dimensionado a carga estática
1.3.3.1 Selección del material
Se ha seleccionado para la fabricación del eje de baja un acero AISI 4340 con las siguientes
características mecánicas:
Tabla 2
1.3.3.2 Coeficientes de seguridad
Se aplicarán los coeficientes de seguridad explicados en (1.1):
-Coeficiente de seguridad parcial para materiales: *+ = 3,0
-Coeficiente de seguridad parcial para cargas: *' = 3,0
,� = -.*+ · *' = 1.7173,0 · 3,0 = 190,77 &�;
Propiedades mecánicas
Resistencia a
fluencia Sy (MPa)
Resistencia a la
tensión Su (MPa) Dureza Rockwell C
1.717 1.962 53

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 9 de 114
1.3.3.3 Esfuerzos principales
El eje principal está sometido a una combinación de cargas tal y como se explica en (1.3.1).
Aquí se determinarán los esfuerzos resultantes de las cargas anteriormente citadas por
separado en función del diámetro del eje, y a continuación se realizará el cálculo de los
esfuerzos principales que servirán de base para realizar las iteraciones necesarias y hallar así
las dimensiones de la sección.
El esfuerzo normal en este caso se calcula según [13] como la suma del esfuerzo procedente
de la carga axial con el esfuerzo que resulta de la aplicación del momento flector, mientras que
el esfuerzo tangencial se determina con el momento torsor aplicado sobre el eje.
-Esfuerzo normal:
,$ = 4 · �#$� · <= + 32 · &'� · <> = 4 · 223,75 · 10>� · <= + 32 · 1.322,70 · 10>� · <> (5. ?. 5)
-Esfuerzo cortante:
@$. = 16 · �� · <> = 16 · 584,653 · 10>� · <> (5. ?. 6)
Los esfuerzos principales se calculan mediante la siguiente expresión:
,A, ,= = ,$2 ± CD,$2 E= + @$.= (5. ?. ?)
Sustituyendo las ecuaciones para el cálculo de los esfuerzos normal y cortante en la expresión
anterior de los esfuerzos principales:
,A, ,= = 2 · �#$� · <= + 16 · &'� · <> ± CF2 · �#$� · <= + 16 · &'� · <> G= + F16 · �� · <>G= (5. ?. H)

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 10 de 114
,A, ,= = 2 · 223,75 · 10>� · <= + 16 · 1.322,70 · 10>� · <> ± CI2 · 223,75 · 10>� · <= + 16 · 1.322,70 · 10>� · <> J= + I16 · 584,653 · 10>� · <> J=
Con los esfuerzos principales calculados en función del diámetro y la resistencia característica
del material se puede calcular la sección del eje mediante el empleo de un proceso iterativo y
un criterio de falla adecuado. Se emplearán para este fin la “Teoría de la energía de
distorsión”, en adelante Criterio de Von Misses, y la “Teoría del esfuerzo cortante máximo”, en
adelante Criterio de Tresca.
A continuación se expondrán las teorías de falla que se emplearán para hallar los esfuerzos
equivalentes que se compararán con la resistencia del material, con los correspondientes
coeficientes de seguridad aplicados según (1.1). De ésta manera y mediante un proceso
iterativo se determinará el diámetro de la sección del eje con el criterio que ofrezca una
solución más conservadora.
1.3.3.4 Criterio de Von Misses
El criterio de Von Misses postula que la falla es causada por la energía elástica asociada con la
deformación por cortante. Por lo tanto, la falla ocurrirá si:
(,A= + ,== − ,A · ,=)A =L ≥ -.*+ · *' (5. ?. N)
Así, sustituyendo la ecuación (1.3.4) en la ecuación (1.3.5):
4� · <> · OP8 · &' + �#$ · <Q= + 48 · �= ≥ -.*+*' (5. ?. R)
4� · <> · S(8 · 1.322,70 · 10> + 223,75 · 10> · <)= + 48 · (584,653 · 10>)= ≥ 1,7173,0 · 3,0

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 11 de 114
Realizando sucesivas iteraciones se ha determinado la solución para el diámetro según el
criterio de Von Misses en un valor de:
< � T����� = 424 ��
1.3.3.5 Criterio de Tresca
El criterio de Tresca estipula que una parte sujeta a cualquier combinación de cargas fallará, ya
sea por fluencia o por fractura, cuando el esfuerzo cortante exceda un valor crítico:
|,A − ,=| ≥ -.*+*' (5. ?. V)
Sustituyendo la ecuación (1.3.4) en la ecuación (1.3.7):
4� · <> · OP8 · &' + �#$ · <Q= + 64 · �= ≥ -.*+*' (5. ?. W)
4� · <> · S(8 · 1.322,70 · 10> + 223,75 · 10> · <)= + 64 · (584,653 · 10>)= ≥ 1,7173,0 · 3,0
Con este caso se consigue un diámetro de eje ligeramente mayor que con el criterio anterior:
<X���Y# = 427 ��
Se escogerá un valor del diámetro de:
<�Z� )#Z# = 440 ��
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 12 de 114
1.3.4 Comprobación a fatiga
En este apartado se realizará una selección de los factores de corrección para resistencia a fatiga
del material y se comprobará el diámetro calculado en la sección anterior bajo el régimen de
cargas que se expuso en (1.3.1).
1.3.4.1 Cargas actuantes
Para realizar la comprobación a fatiga se considerará que el eje principal está sometido a
flexión invertida y torsión constante. Por lo tanto no se tendrá en cuenta para este apartado la
fuerza axial sobre el eje que fue considerada en el análisis a carga estática.
Con los resultados obtenidos en el cálculo de cargas del apartado (1.3.1) se procede a
continuación a definir las componentes alternantes y medias resultantes de las solicitaciones
introducidas de acuerdo con las consideraciones expuestas en el párrafo anterior:
� Fuerza axial
Como se ha apuntado en líneas anteriores, la componente axial del empuje del viento no
será considerada en el análisis a fatiga.
� Par torsor
El par torsor al que está sometido el eje tiene un valor constante, por lo tanto:
[�+á$ = 584,653 "� · ��+í = 584,653 "� · � ̂
�+ = �+á$ + �+í 2 = 584,653 + 584,6532 = 584,653 KN · m (5. ?. 5a)
�# = �+á$ − �+í 2 = 584,653 − 584,6532 = 0 "� · �(5. ?. 55)
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 13 de 114
� Momento flector
La flexión producida en el eje es completamente invertida, por tanto:
[ &+á$ = 1.322,70 KN · m&+í = −1.322,70 KN · m ̂
&+ = &+á$ + &+í 2 = 1.322,70 + (−1.322,70)2 = 0 "� · � (5. ?. 56)
&# = &+á$ − &+í 2 = 1.322,70 − (−1.322,70)2 = 1.322,70 KN · m (5. ?. 5?)
1.3.4.2 Factores de corrección del límite a fatiga
Para el cálculo del límite a fatiga del material seleccionado en el caso concreto que se está
analizando, se empleará la siguiente expresión obtenida de [13]:
-′� = 0,5 · -c3
Donde:
-S’e es el límite a fatiga bajo condiciones ideales (en MPa).
-Sut es la resistencia última del material (en MPa).
-′� = 0,5 · 1.962 = 981 &�;
Éste límite debe ser corregido con una serie de coeficientes para la obtención del límite a la
fatiga modificado, con el que se realizarán las comprobaciones:
-� = d' · d� · d� · d3 · d+ · -′�
A continuación se detalla la obtención de dichos factores modificadores.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 14 de 114
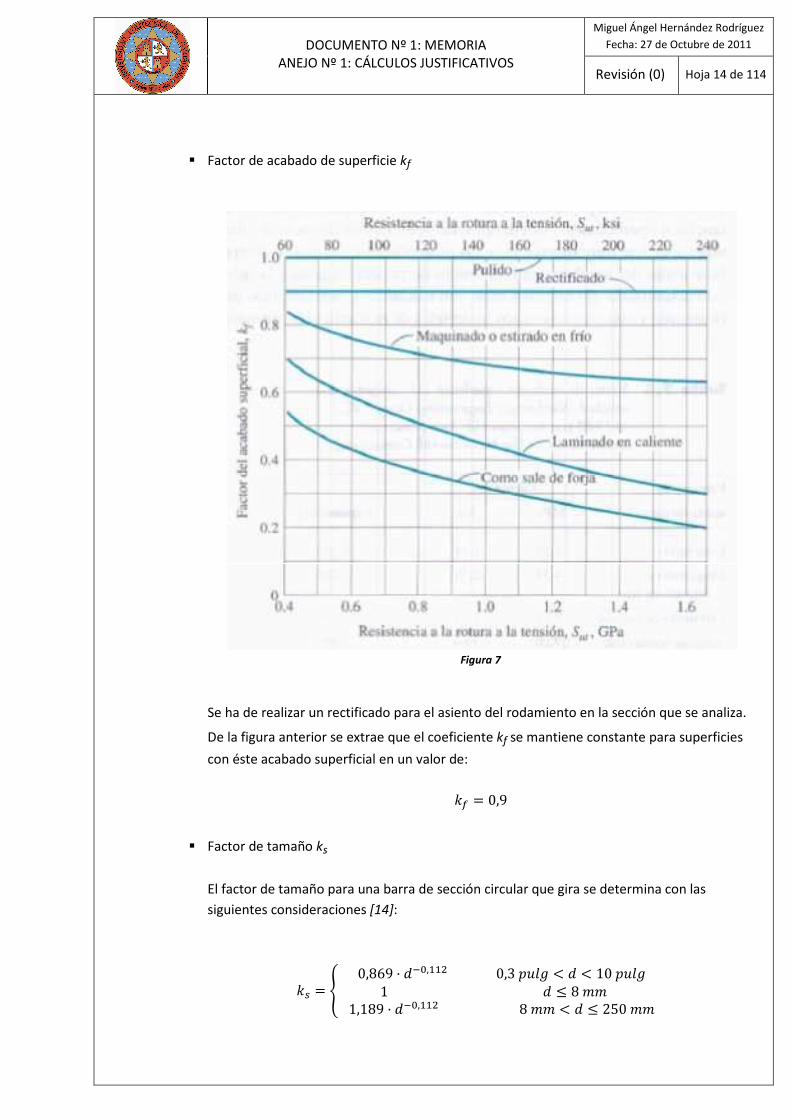
� Factor de acabado de superficie kf
Figura 7
Se ha de realizar un rectificado para el asiento del rodamiento en la sección que se analiza.
De la figura anterior se extrae que el coeficiente kf se mantiene constante para superficies
con éste acabado superficial en un valor de:
d' = 0,9
� Factor de tamaño ks
El factor de tamaño para una barra de sección circular que gira se determina con las
siguientes consideraciones [14]:
d� = e 0,869 · <fg,AA= 0,3 hij� < < < 10 hij� 1 < ≤ 8 �� 1,189 · <fg,AA= 8 �� < < ≤ 250 �� ̂

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 15 de 114
El diámetro del eje es mayor de 250 mm, por lo tanto según recomendación de [14] para
este caso se empleará un valor de:
d� = 0,65
� Factor de confiabilidad kr
Probabilidad de
supervivencia (%) kr
50 1,00
90 0,90
95 0,87
99 0,82
99.9 0,75
99.99 0,70
Tabla 3 [14]
Estimando una probabilidad de supervivencia del 99% según recomendaciones de AGMA el
valor de kr es de: d� = 0,82
� Factor de temperatura kt
No se consideran variaciones en la temperatura significativas que puedan afectar al límite
de fatiga del material, por lo tanto este factor se considerará como:
d3 = 1
� Factor de efectos diversos km
Se tomará un valor de: d+ = 1

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 16 de 114
Teniendo en cuenta los factores anteriormente detallados, se corrige el límite a fatiga de la
siguiente manera:
-� = 0,9 · 0,65 · 0,82 · 1 · 1 · 981 = 470,58 &�;
1.3.4.3 Factor de concentración de esfuerzos Kf
Debe ser considerado para el diseño previo a fatiga del eje un valor preliminar para el factor de
concentración de esfuerzos en la sección a analizar. Se ha establecido un valor inicial
suficientemente conservador para este factor de:
"' = 2,5
1.3.4.4 Factor de seguridad a fatiga
Habiendo considerado todos los coeficientes modificadores de los apartados anteriores se
procede a continuación a determinar el grado de seguridad de la pieza a fatiga con el diámetro
de la sección calculado a carga estática.
Se empleará como criterio de falla para determinar el factor de seguridad a fatiga la Teoría de
la energía de distorsión para materiales dúctiles, y más concretamente la modificación
realizada por Peterson [13]:
-.m� = CF,+ + -.-� · "' · ,#G= + 3 F@+ + -.-� · "'� · @#G= (5. ?. 5H)
La ecuación 1.3.1 en el caso de no considerar el esfuerzo axial se transforma en:
,$ = 32 · &'� · <> (5. ?. 5N)

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 17 de 114
Con las ecuaciones 1.3.2 y 1.3.15, la ecuación 1.3.14 queda de la siguiente manera al despejar
el coeficiente de seguridad:
m� = � · <> · -.32 · CF&+ + -.-� · "' · &#G= + 34 · F�+ + -.-� · "'� · �#G= (5. ?. 5R)
Introduciendo los valores hallados en las ecuaciones 1.3.10 a 1.3.13y los valores para las
resistencias del material y el diámetro expuestos en apartados anteriores, se obtiene un
coeficiente de seguridad de:
m� = � · 0,440> · 1.717.00032 · OD0 + 1.717.000470.580 · 2,5 · 1.322,70E= + 34 · (584,653 + 0)=
m� = 1,18
El coeficiente de seguridad es superior a 1, por lo tanto el esfuerzo a fatiga soportado por el
eje es inferior al esfuerzo admisible por el material empleado. Al haber escogido coeficientes y
supuestos que sobredimensionan considerablemente los esfuerzos aplicados se acepta como
válido éste coeficiente de seguridad y por consiguiente los cálculos y estimaciones
preliminares adoptadas.
Nótese que las magnitudes en las que se expresan los valores de la fórmula anterior son:
-Sy y Se en Kilopascales (KPa).
-d en Metros (m).
-Ma y Tm en Kilonewtons por metro (KN·m)
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 18 de 114
1.4 CÁLCULO DE RELACIONES DE TRANSMISIÓN, NÚMERO DE DIENTES Y DISTANCIA
ENTRE CENTROS
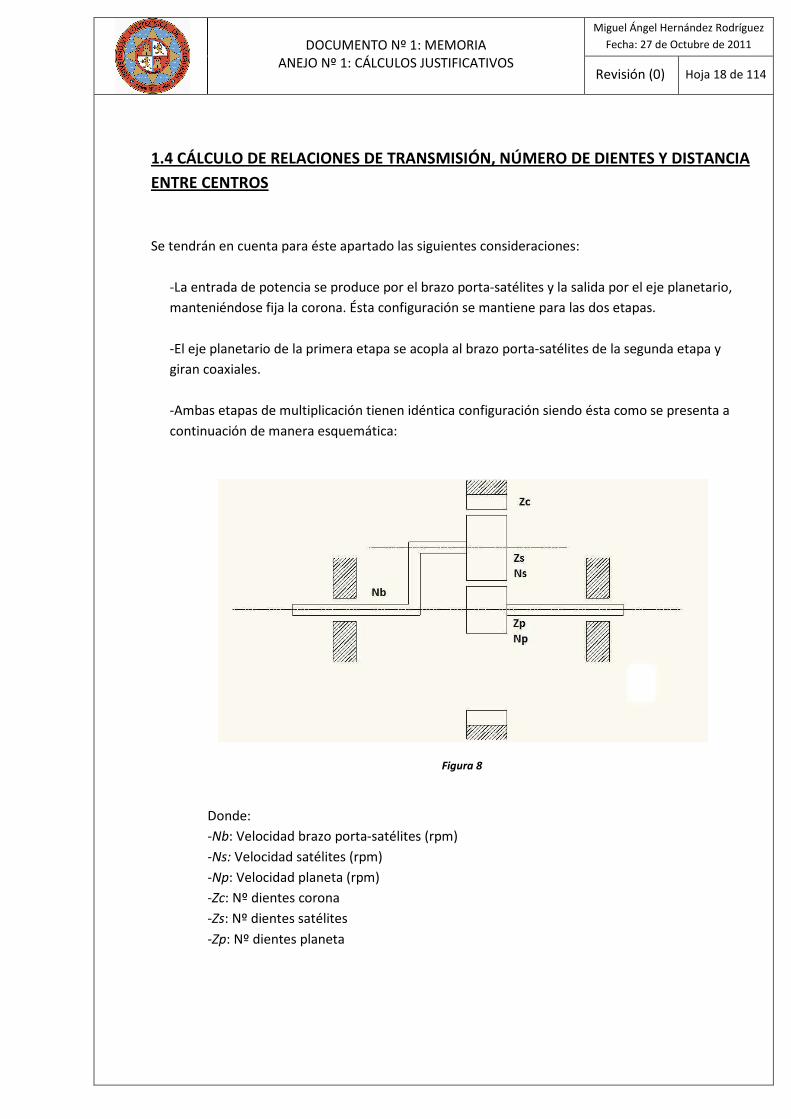
Se tendrán en cuenta para éste apartado las siguientes consideraciones:
-La entrada de potencia se produce por el brazo porta-satélites y la salida por el eje planetario,
manteniéndose fija la corona. Ésta configuración se mantiene para las dos etapas.
-El eje planetario de la primera etapa se acopla al brazo porta-satélites de la segunda etapa y
giran coaxiales.
-Ambas etapas de multiplicación tienen idéntica configuración siendo ésta como se presenta a
continuación de manera esquemática:
Figura 8
Donde:
-Nb: Velocidad brazo porta-satélites (rpm)
-Ns: Velocidad satélites (rpm)
-Np: Velocidad planeta (rpm)
-Zc: Nº dientes corona
-Zs: Nº dientes satélites
-Zp: Nº dientes planeta

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 19 de 114
-Para obtener las velocidades de cada rueda se usará la nomenclatura empleada en la figura 8 y la
fórmula de Willis [15] para engranajes epicicloidales:
�� = �YnY + �ononY + no
-La relación de transmisión total es:
p3 = �#q3#���3�� = 1.50022,16
p3 = 67,68
-Se ha considerado obtener un diseño con una relación de multiplicación mayor en la segunda
etapa debido a que esto reducirá las solicitaciones de carga a soportar por la primera etapa. Así
teniendo en cuenta que la relación total es el producto de las dos etapas, el valor de la segunda
etapa debe de ser superior a:
p= > √67.68
p= > 8.22
-Debido a las restricciones que supone la velocidad constante impuesta por el generador eléctrico
acoplado en el eje de alta velocidad del tren de potencia, se ha creído conveniente realizar el
cálculo cinemático de cada etapa de manera inversa respecto a los movimientos de entrada y
salida reales, de ésta manera se toma como entrada la velocidad procedente del eje de alta, que
es conocida y fija en 1.500 rpm, y como salida la velocidad del eje de baja, calculada
anteriormente en (1.2) e igual a 22,16 rpm.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 20 de 114
Así pues, según éstas consideraciones se procederá en primer lugar con el cálculo de la segunda
etapa de multiplicación para determinar la velocidad del brazo porta-satélites a partir de la velocidad
conocida del eje de alta.
1.4.1 Cálculo segunda etapa
El proceso se realizará mediante iteración con las fórmulas expuestas anteriormente que
relacionan velocidades, número de dientes, módulo y diámetro primitivo. De éste modo, y como
se podrá comprobar más adelante, los valores obtenidos referentes a velocidad de salida y
relación de transmisión cumplen con las restricciones expuestas en las consideraciones que se
recogen al inicio de este mismo capítulo.
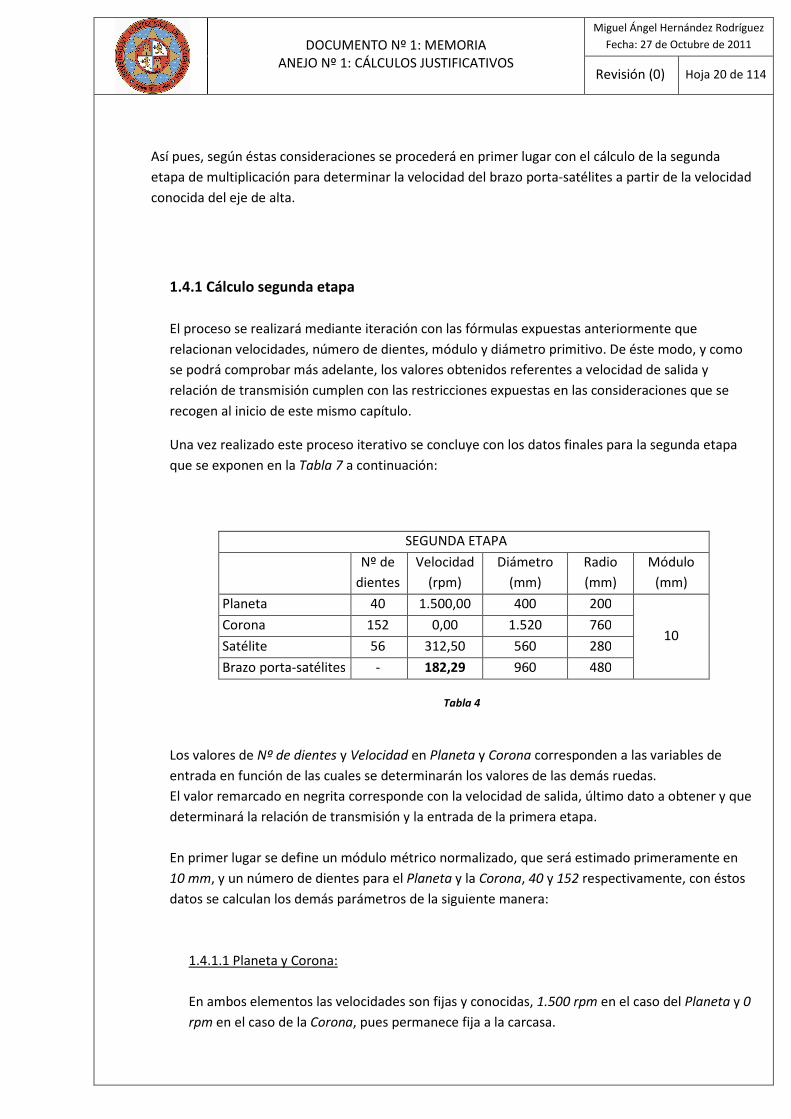
Una vez realizado este proceso iterativo se concluye con los datos finales para la segunda etapa
que se exponen en la Tabla 7 a continuación:
SEGUNDA ETAPA
Nº de
dientes
Velocidad
(rpm)
Diámetro
(mm)
Radio
(mm)
Módulo
(mm)
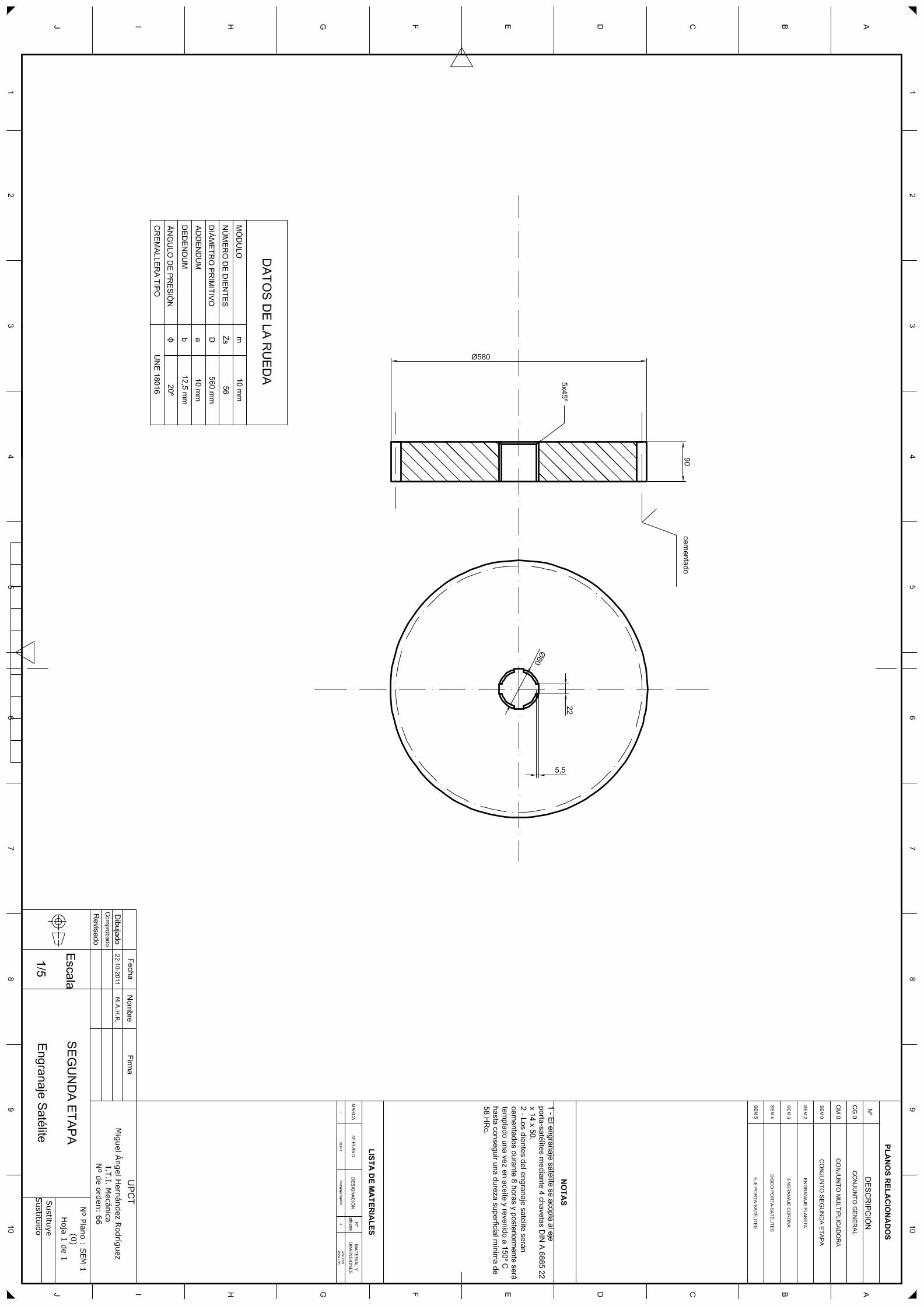
Planeta 40 1.500,00 400 200
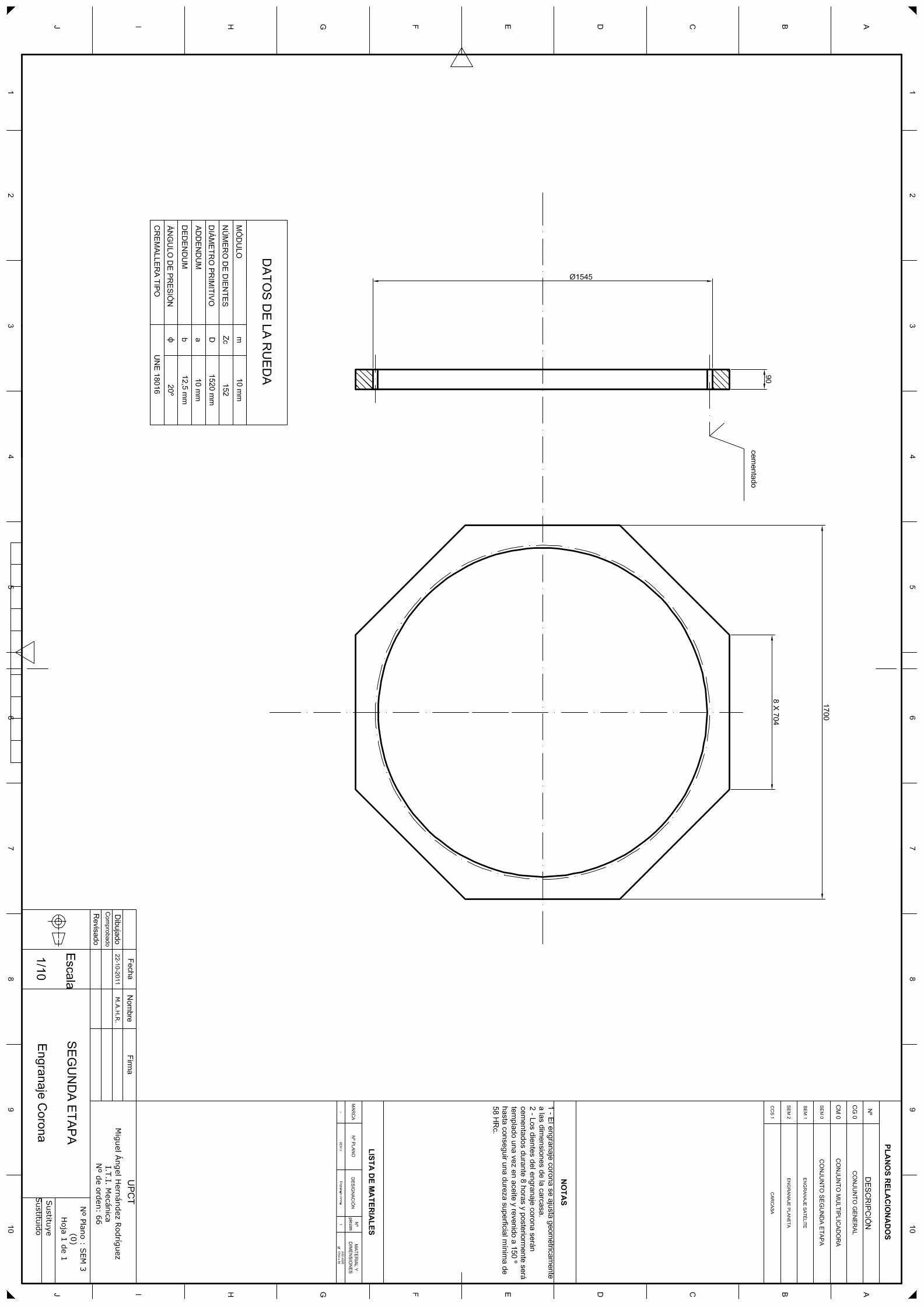
10 Corona 152 0,00 1.520 760
Satélite 56 312,50 560 280
Brazo porta-satélites - 182,29 960 480
Tabla 4
Los valores de Nº de dientes y Velocidad en Planeta y Corona corresponden a las variables de
entrada en función de las cuales se determinarán los valores de las demás ruedas.
El valor remarcado en negrita corresponde con la velocidad de salida, último dato a obtener y que
determinará la relación de transmisión y la entrada de la primera etapa.
En primer lugar se define un módulo métrico normalizado, que será estimado primeramente en
10 mm, y un número de dientes para el Planeta y la Corona, 40 y 152 respectivamente, con éstos
datos se calculan los demás parámetros de la siguiente manera:
1.4.1.1 Planeta y Corona:
En ambos elementos las velocidades son fijas y conocidas, 1.500 rpm en el caso del Planeta y 0
rpm en el caso de la Corona, pues permanece fija a la carcasa.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 21 de 114
Los diámetros primitivos se calculan a partir del número de dientes y el módulo métrico de la
siguiente manera:
2 = n · �
Así el diámetro primitivo del Planeta es:
2o = no · � = 40 · 10 = 400 ��
Y el de la Corona:
2Y = nY · � = 152 · 10 = 1.520 ��
1.4.1.2 Satélites
A continuación se determina la velocidad de los Satélites mediante la fórmula de Willis:
�� = �Y · nY + �t · nonY + no
�� = 0 · 152 + 1.500 · 40152 + 40 = 312,50 ph�
El diámetro de los Satélites será igual a la diferencia de radios entre la Corona y el Planeta:
2� = �Y − �o
2� = 760 − 200 = 560 ��

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 22 de 114
El número de dientes de los Satélites se calcula a partir del diámetro de los mismos y el
módulo métrico de la siguiente manera:
n� = 2��
n� = 56010 = 56 <u�mv�w
1.4.1.3 Brazo porta-satélites:
La longitud del brazo es la suma de los radios del Satélite y el Planeta:
�) = �� + �o = 280 + 200 = 480 ��
En último lugar se determina la velocidad del Brazo porta-satélites como se muestra a
continuación, mediante las ecuaciones de la cinemática del sólido rígido, conocidos el radio y
la velocidad de los Satélites y la longitud del Brazo porta-satélites:
�) = �x · ���) = 312,50 · 280480 = 182,29 ph�
Esta velocidad es común a ambas etapas ya que se corresponde con la salida de la primera y
por tanto, con la entrada de la segunda, siendo a su vez el parámetro que define la relación de
transmisión:
p= = �o�) = 1.500182,29 = 8,22
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 23 de 114
La cual cumple con la restricción impuesta anteriormente:
p= = 8,25 > 8,22
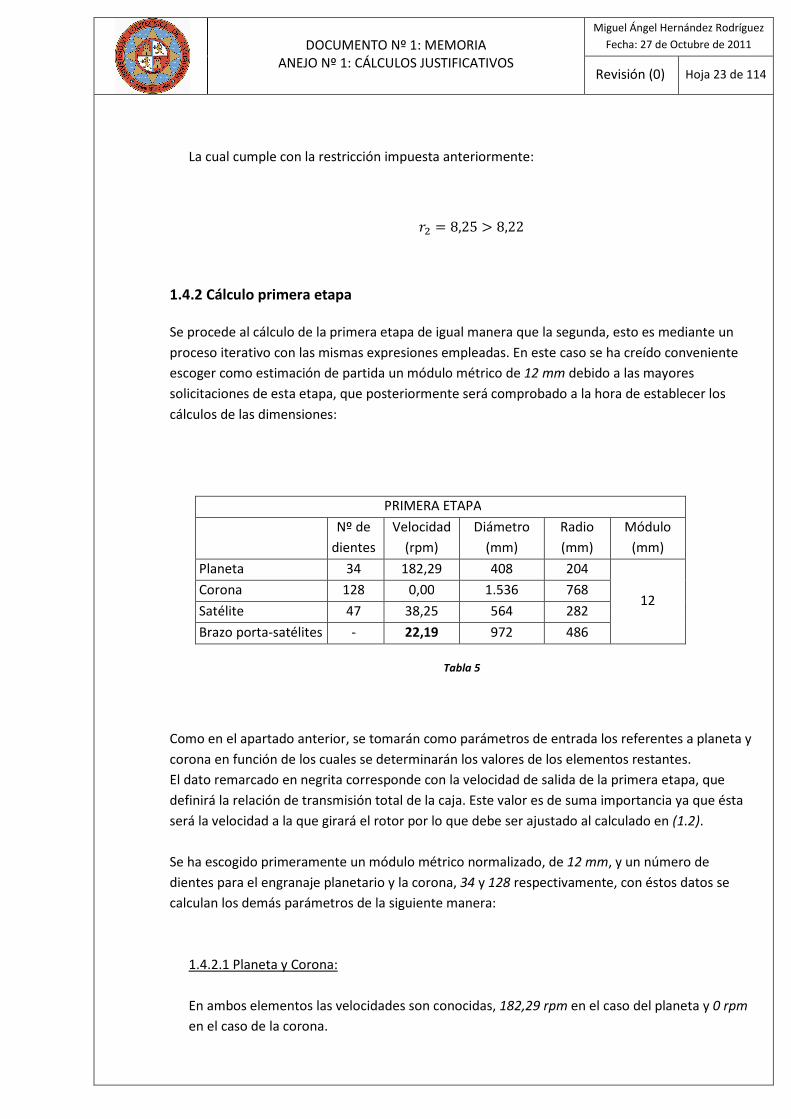
1.4.2 Cálculo primera etapa
Se procede al cálculo de la primera etapa de igual manera que la segunda, esto es mediante un
proceso iterativo con las mismas expresiones empleadas. En este caso se ha creído conveniente
escoger como estimación de partida un módulo métrico de 12 mm debido a las mayores
solicitaciones de esta etapa, que posteriormente será comprobado a la hora de establecer los
cálculos de las dimensiones:
PRIMERA ETAPA
Nº de
dientes
Velocidad
(rpm)
Diámetro
(mm)
Radio
(mm)
Módulo
(mm)
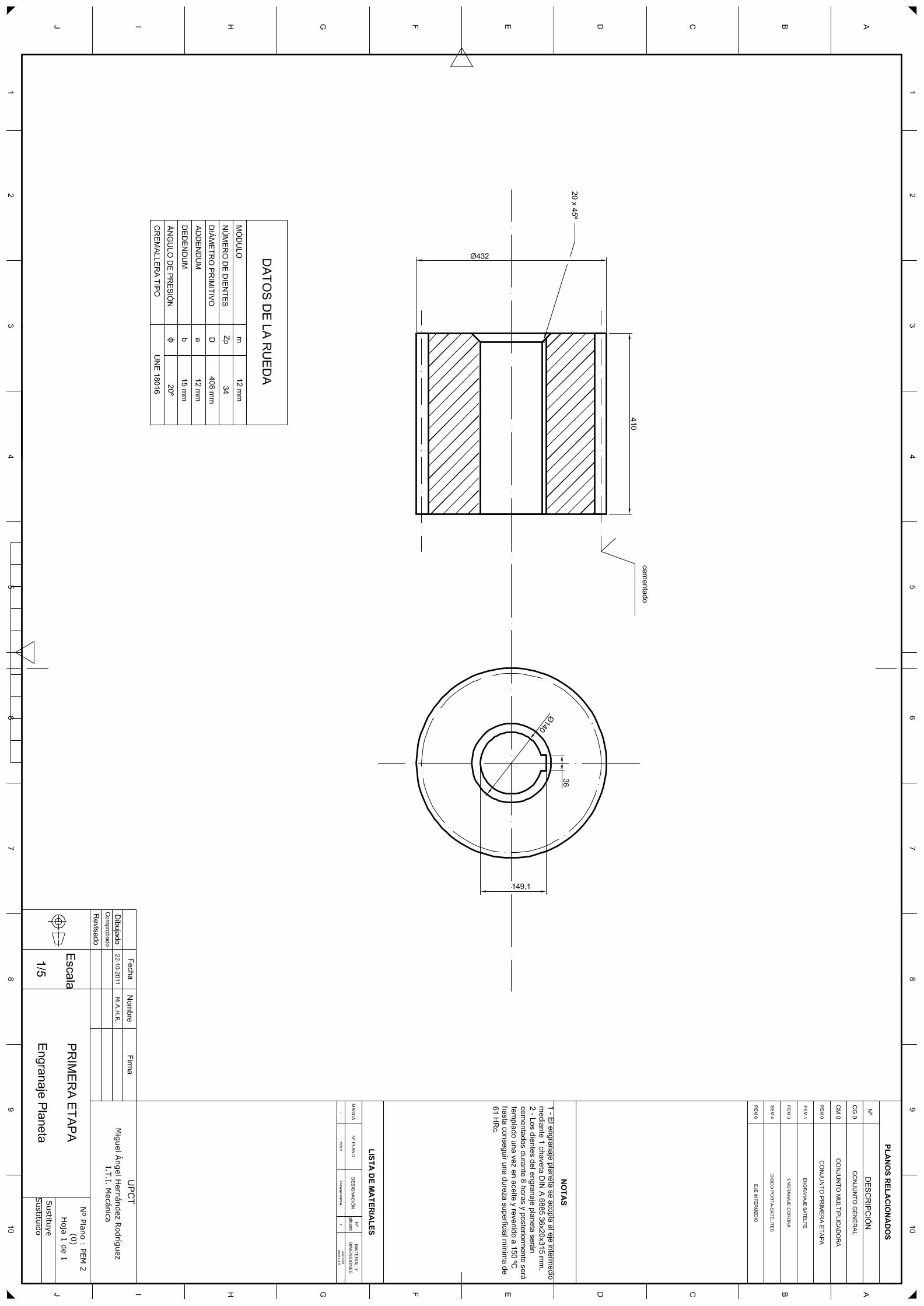
Planeta 34 182,29 408 204
12 Corona 128 0,00 1.536 768
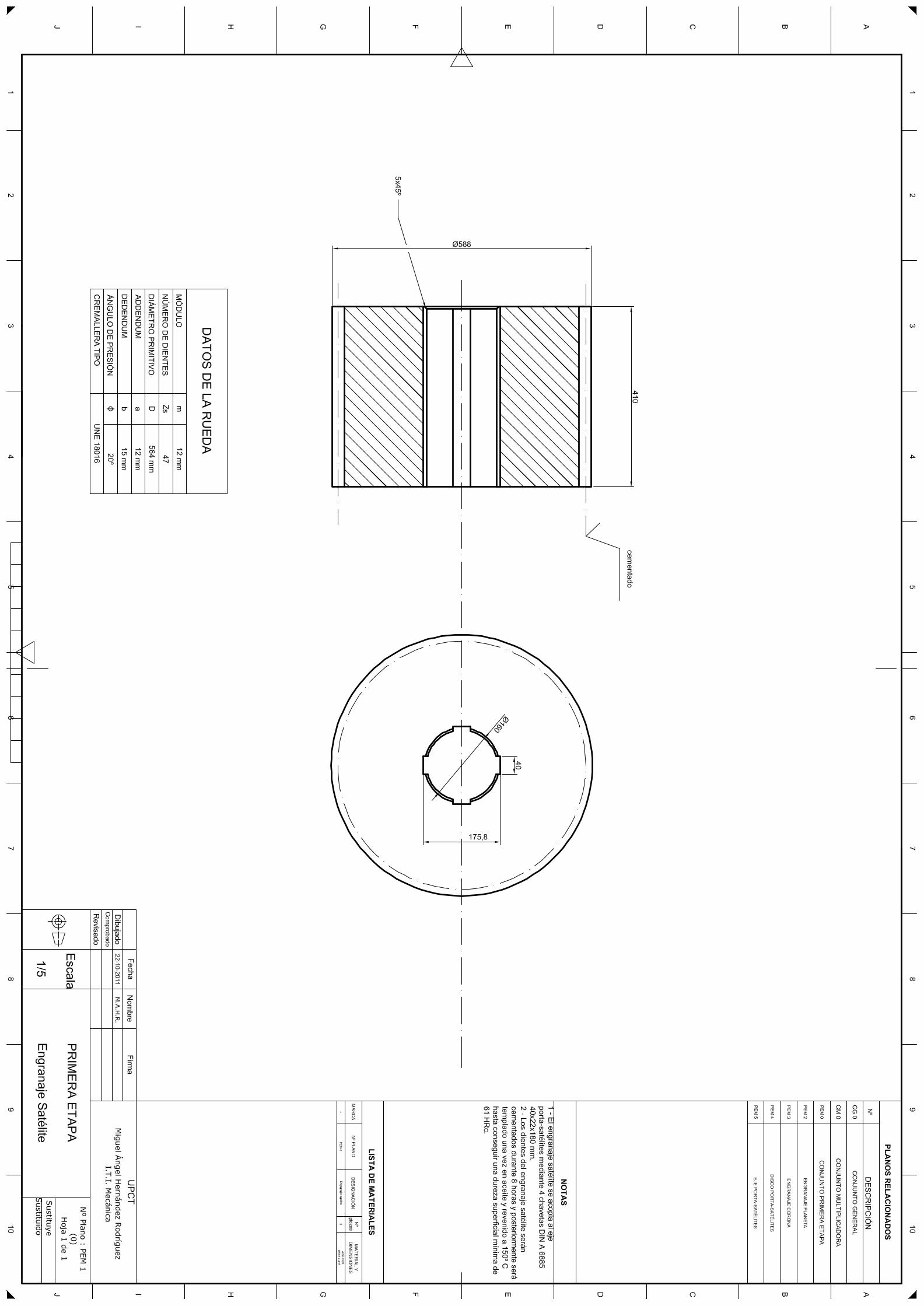
Satélite 47 38,25 564 282
Brazo porta-satélites - 22,19 972 486
Tabla 5
Como en el apartado anterior, se tomarán como parámetros de entrada los referentes a planeta y
corona en función de los cuales se determinarán los valores de los elementos restantes.
El dato remarcado en negrita corresponde con la velocidad de salida de la primera etapa, que
definirá la relación de transmisión total de la caja. Este valor es de suma importancia ya que ésta
será la velocidad a la que girará el rotor por lo que debe ser ajustado al calculado en (1.2).
Se ha escogido primeramente un módulo métrico normalizado, de 12 mm, y un número de
dientes para el engranaje planetario y la corona, 34 y 128 respectivamente, con éstos datos se
calculan los demás parámetros de la siguiente manera:
1.4.2.1 Planeta y Corona:
En ambos elementos las velocidades son conocidas, 182,29 rpm en el caso del planeta y 0 rpm
en el caso de la corona.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 24 de 114
Los diámetros primitivos se calculan a partir del número de dientes y el módulo métrico de la
siguiente manera:
2 = n · �
Así el diámetro primitivo del planeta es:
2o = no · � = 34 · 12 = 408 ��
Y el de la corona:
2Y = nY · � = 128 · 12 = 1.536 ��
1.4.2.2 Satélites
A continuación se determina la velocidad de los satélites mediante la fórmula de Willis:
�� = �Y · nY + �t · nonY + no
�� = 0 · 128 + 182,29 · 34128 + 34 = 38,25 ph�
El diámetro de los satélites será igual a la diferencia de radios entre la corona y el planeta:
2� = �Y − �o
2� = 768 − 204 = 564 ��

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 25 de 114
El número de dientes de los satélites se calcula a partir del diámetro de los mismos y el módulo
métrico de la siguiente manera:
n� = 2��
n� = 56412 = 47 <u�mv�w
1.4.2.3 Brazo porta-satélites:
La longitud del brazo es la suma de los radios del satélite y el planeta:
�) = �� + �o = 282 + 204 = 486 ��
En último lugar se determina la velocidad del brazo porta-satélites como se muestra a
continuación, mediante las ecuaciones de la cinemática del sólido rígido conocidos el radio y la
velocidad de los satélites y la longitud del brazo:
�) = �x · ���) = 38,25 · 282486 = 22,19 ph�
Esta velocidad se corresponde con el movimiento de entrada de la primera etapa y por tanto,
con la velocidad del rotor, siendo a su vez el parámetro que define la relación de transmisión:
pA = �o�) = 182,2922,19 = 8,21

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 26 de 114
Con los valores de las velocidades y relaciones de transmisión obtenidos anteriormente se realiza a
continuación una comparativa frente a los valores nominales con el objetivo de estimar el error
cometido en los cálculos de los apartados precedentes.
Nominal Calculada Error (%)
TSR 7,00 7,01
0,17 Velocidad del rotor (rpm) 22,16 22,19
Relación de transmisión 67,68 67,56
Tabla 6
1.5 DIMENSIONADO 1ª ETAPA MULTIPLICADORA
1.5.1 Cálculo de fuerzas en los engranajes
En este apartado se calcularán las fuerzas actuantes en la primera etapa del tren epicicloidal.
Cabe destacar que la configuración adoptada cuenta con tres satélites que se reparten la potencia
nominal transmitida, sin embargo, para el dimensionado se considerará como si un único satélite
transmitiera toda la potencia. En función de esta consideración se llevará a cabo el cálculo de las
fuerzas que transmite cada satélite y posteriormente se realizará un balance de fuerzas a modo
de comprobación de los resultados obtenidos.
1.5.1.1 Planeta
La fuerza tangencial transmitida se obtiene a partir del par transmitido y el diámetro de la
rueda, conocidos los datos de potencia y velocidad nominales.
�t = 30 · � � · �t = 30 · 900� · 182,29 = 47,146 "� · �
�tfx = 2 · �o2t = 2 · 47,146408 · 10f> = 231,107 "�
Ésta es la fuerza total transmitida a los tres satélites por el engranaje planetario.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 27 de 114
1.5.1.2 Satélites
Los satélites reciben el par torsor del brazo porta-satélites y reparten la fuerza resultante entre
la corona y el engranaje planetario.
�x = 30 · � � · �x = 30 · 900� · 38,25 = 224,690 "� · �
�x = �xft + �xfy
�x = 2 · �x2x = 2 · 224,690564 · 10f> = 796,773 "�
Ésta es la fuerza total que transmiten los satélites.
Así, conocida la fuerza total transmitida por el satélite y la fuerza impulsora del engranaje
planetario, para conocer la fuerza que actúa sobre la corona basta con restar ambos valores:
�xfy = �x − �xft �xfy = 796,773 − 231,107 = 565,082 "�
El punto en contacto entre el satélite y la corona es donde se transmite la mayor fuerza
tangencial sobre la rueda satélite, por lo que será el valor que se emplee para los posteriores
cálculos de dimensionado de los engranajes.
1.5.1.3 Corona
La fuerza que cada satélite ejerce sobre la corona se calculó en el apartado anterior.
�xfy = 565,082 "�
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 28 de 114
1.5.2 Dimensionado del eje porta-satélites
Para el cálculo de las dimensiones del eje de los satélites se procederá a determinar el diámetro
de la sección por criterios de resistencia a fatiga y posteriormente se realizará una comprobación
a carga estática.
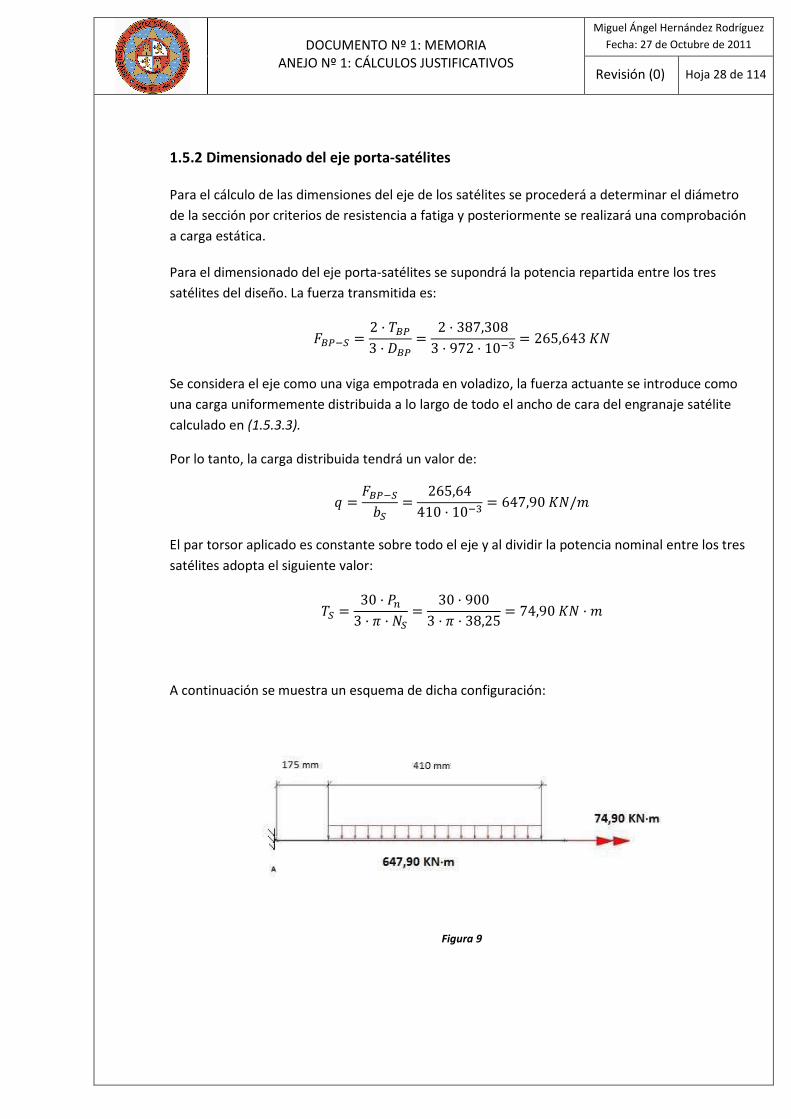
Para el dimensionado del eje porta-satélites se supondrá la potencia repartida entre los tres
satélites del diseño. La fuerza transmitida es:
�ztfx = 2 · �zt3 · 2zt = 2 · 387,3083 · 972 · 10f> = 265,643 "�
Se considera el eje como una viga empotrada en voladizo, la fuerza actuante se introduce como
una carga uniformemente distribuida a lo largo de todo el ancho de cara del engranaje satélite
calculado en (1.5.3.3).
Por lo tanto, la carga distribuida tendrá un valor de:
{ = �ztfx|x = 265,64410 · 10f> = 647,90 "�/�
El par torsor aplicado es constante sobre todo el eje y al dividir la potencia nominal entre los tres
satélites adopta el siguiente valor:
�x = 30 · � 3 · � · �x = 30 · 9003 · � · 38,25 = 74,90 "� · �
A continuación se muestra un esquema de dicha configuración:
Figura 9

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 29 de 114
Las reacciones en el apoyo se muestran en la siguiente tabla:
Rodamiento A
Fuerza axial 0,00 KN
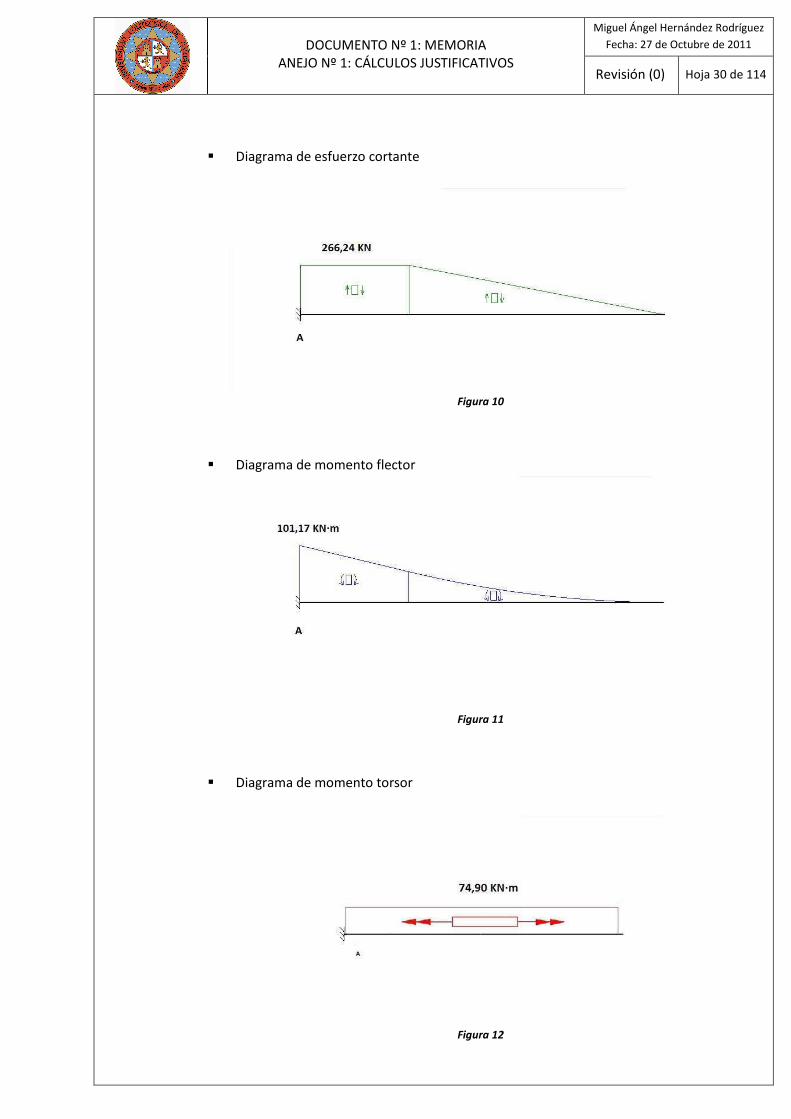
Fuerza cortante 265,64 KN
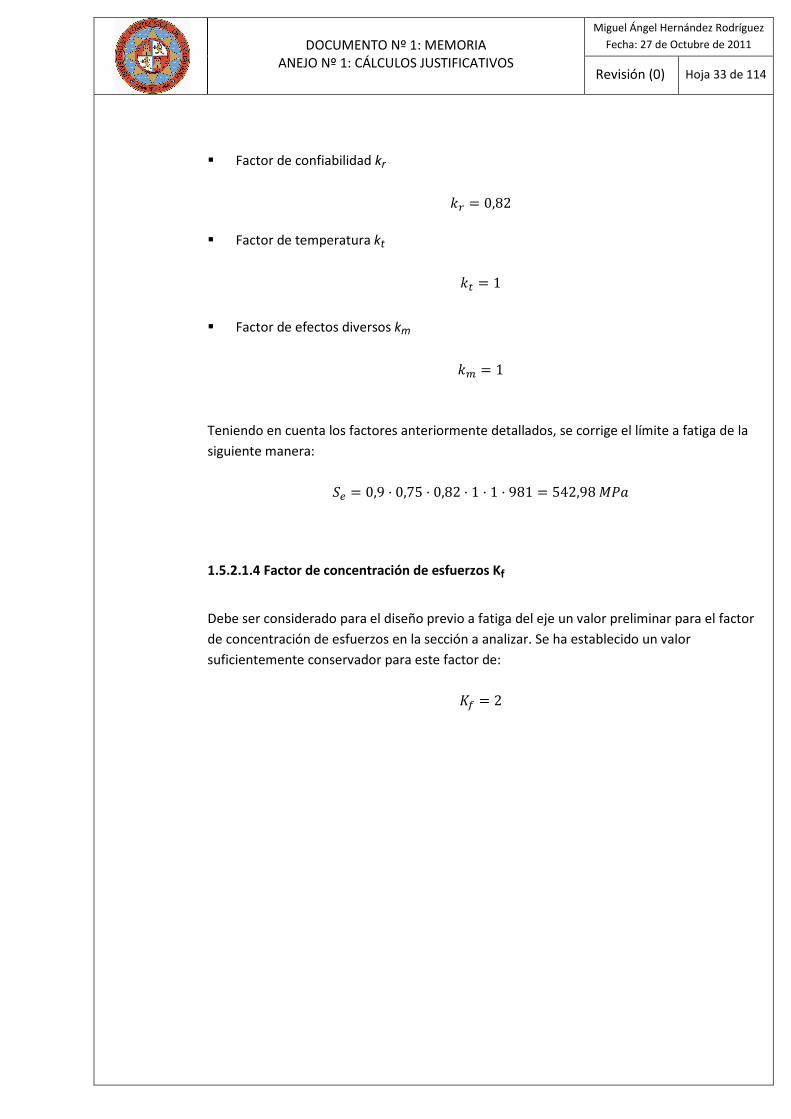
Par flector 101,17 KN·m
Par torsor 74,90 KN·m
Tabla 7
1.5.2.1 Dimensionado a fatiga
En este apartado se realizará una selección de los factores de corrección para resistencia a
fatiga del material y se determinará el diámetro de la sección que soporta las solicitaciones a
fatiga que se exponen a continuación.
Los criterios empleados para la selección de los factores correctores son los mismos que se
expusieron en (1.3.4.2).
1.5.2.1.1 Selección del material
Se empleará un acero AISI 4340 en la fabricación del eje porta-satélites, que posee las
características citadas en (1.3.3.1).
-. = 1.717 &�; -c = 1.962 &�;
1.5.2.1.2 Diagramas de esfuerzos
Los diagramas de esfuerzos son los siguientes:
� Diagrama de esfuerzo axil
No procede.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 30 de 114
� Diagrama de esfuerzo cortante
Figura 10
� Diagrama de momento flector
Figura 11
� Diagrama de momento torsor
Figura 12

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 31 de 114
Los diagramas de esfuerzos indican que la sección crítica se encuentra en A, sección que
corresponde al alojamiento del rodamiento fijo sobre el que apoya el eje.
1.5.2.1.3 Cargas actuantes
Para realizar el dimensionado a fatiga se considerará que el eje está sometido a flexión
invertida y torsión constante tal y como se detalló en (1.5.2).
Con los resultados obtenidos en el cálculo de cargas de (1.5.1.2) se procede a continuación
a definir las componentes alternantes y medias resultantes de las solicitaciones
introducidas:
• Fuerza axial
Este eje no está solicitado axialmente como se explicó en apartados previos.
• Par torsor
El par torsor al que está sometido el eje tiene un valor constante, por lo tanto:
[�+á$ = 74,90 "� · ��+í = 74,90 "� · �^
�+ = �+á$ + �+í 2 = 74,90 + 74,902 = 74,90 KN · m
�# = �+á$ − �+í 2 = 74,90 − 74,902 = 0 "� · �

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 32 de 114
• Momento flector
La flexión producida en el eje es completamente invertida, por tanto:
[ &+á$ = 81,20 KN · m&+í = −81,20 KN · m ̂
&+ = &+á$ + &+í 2 = 81,20 + (−81,20)2 = 0 "� · � &# = &+á$ − &+í 2 = 81,20 − (−81,20)2 = 81,20 KN · m
1.5.2.1.3 Factores de corrección del límite a fatiga
El tipo de solicitación al que está sometido este eje es el mismo que se consideró en el
diseño del eje principal, por lo que para el cálculo de la seguridad a fatiga se tomarán como
válidas las expresiones y consideraciones utilizadas en el cálculo del eje de baja. Por lo
tanto, los factores correctores del límite de fatiga serán idénticos a excepción del factor de
tamaño ks, que se calculará de manera particular para este eje.
-′� = 0,5 · -c3
-′� = 0,5 · 1.962 = 981 &�;
� Factor de acabado de superficie kf
d' = 0,9
� Factor de tamaño ks
El diámetro de la sección no es conocido, por lo que se empleará un valor para este
coeficiente de:
d� = 0,75
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 33 de 114
� Factor de confiabilidad kr
d� = 0,82
� Factor de temperatura kt
d3 = 1
� Factor de efectos diversos km
d+ = 1
Teniendo en cuenta los factores anteriormente detallados, se corrige el límite a fatiga de la
siguiente manera:
-� = 0,9 · 0,75 · 0,82 · 1 · 1 · 981 = 542,98 &�;
1.5.2.1.4 Factor de concentración de esfuerzos Kf
Debe ser considerado para el diseño previo a fatiga del eje un valor preliminar para el factor
de concentración de esfuerzos en la sección a analizar. Se ha establecido un valor
suficientemente conservador para este factor de:
"' = 2

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 34 de 114
1.5.2.1.5 Diámetro de la sección
Habiendo considerado todos los coeficientes modificadores de los apartados anteriores se
procede a continuación a determinar el diámetro mínimo del eje a fatiga con las
expresiones empleadas en (1.3.4.4), escogiendo un factor de seguridad de 1.
-.m� = CF,+ + -.-� · "' · ,#G= + 3 F@+ + -.-� · "'� · @#G=
< = ~32 · CF&+ + -.-� · "' · &#G= + 34 · F�+ + -.-� · "'� · �#G=� · m� · -.
�
< = �32 · OD0 + 1.717.000542.980 · 2 · 101,17E= + 34 · (74,90 + 0)=� · 1 · 1.717.000�
< = 156,25 ��
Se escogerá un valor redondeado al alza del diámetro calculado anteriormente, que será
de: <�Z� �#3éq�3�� A = 160 ��
1.5.2.2 Comprobación a carga estática
1.5.2.2.1 Criterio de Von Misses
La aplicación de este criterio fue explicada en (1.3.3.4), la fórmula de cálculo es la siguiente:
4� · <> · OP8 · &' + �#$ · <Q= + 48 · �= ≥ -.��

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 35 de 114
A diferencia de cálculos similares anteriores, en éste eje se realizará la comprobación a
carga estática en lugar del dimensionado, por lo que se despeja de la fórmula el factor de
seguridad para verificar que el diámetro de la sección calculado en (1.5.2.1.6) es válido.
�� = 1,717 · � · 160>4 · S(8 · 101,17 · 10>)= + 48 · (74,90 · 10>)= = 5,74
Como se puede comprobar el factor de seguridad es superior a 1, por lo que no habrá falla
a carga estática según este criterio, y el diámetro calculado se considera válido.
1.5.2.2.2 Criterio de Tresca
El criterio de Tresca fue explicado en (1.3.3.5), la fórmula empleada es:
4� · <> · OP8 · &' + �#$ · <Q= + 64 · �= ≥ -.��
�� = 1,717 · � · 160>4 · S(8 · 101,17 · 10>)= + 64 · (74,90 · 10>)= = 5,48
Habiendo realizado las comprobaciones a falla estática por los dos criterios expuestos
anteriormente y tras verificar que hay seguridad bajo ambas consideraciones se tomará como
válido el valor del diámetro calculado en (1.5.2.1.6). <�Z� �#3éq�3�� A = 160 ��

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 36 de 114
1.5.3 Determinación del ancho de cara de los engranajes
Como se ha podido comprobar en el apartado anterior, los engranajes satélite son los más
solicitados, por lo que la magnitud del ancho de cara determinado en esta sección para los
satélites será la que se emplee en las demás ruedas.
El dimensionado de los engranajes, desde un punto de vista resistente, se hace en función de las
solicitaciones que soporta el diente, por flexión en la base y por fatiga superficial.
Se ha seleccionado un acero de cementación AISI 4320 grado AGMA 2 [17] templado en aceite y
revenido, con una dureza superficial mínima de 61 HRC. Tiene los siguientes números de esfuerzo
admisibles: -#3 = 448,16 &�; -#Y = 1.551,32 &�;
1.5.3.1 Esfuerzo de flexión
En el caso de la flexión se plantea la fórmula de AGMA.
-3 = "� · "� · "+ · "� · �3| · � · � (5. N. 5)
Donde:
-St es el esfuerzo de flexión que soportan los dientes (en MPa).
-Ko es el factor de sobrecarga para resistencia flexionante. Considera la posibilidad de que
variaciones en la carga, vibraciones, choques u otras condiciones puedan causar cargas
máximas mayores que las calculadas.
Éste valor se fijará en 1,25 para todos los engranes de la primera etapa.
- Ks es el factor de tamaño para la resistencia flexionante. Es únicamente dependiente del
módulo empleado para el tren, que ha sido fijado en 12 mm para la primera etapa, y en 10
mm para la segunda. AGMA [17] sugiere los siguientes valores para éste factor:

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 37 de 114
Módulo métrico
(mm)
Factor de tamaño
Ks
≤5 1,00
6 1,05
8 1,15
12 1,25
20 1,40
Tabla 8
Todas las ruedas de la primera etapa, de acuerdo con lo expuesto anteriormente y a la
Tabla 11, serán dimensionadas con un factor de tamaño de 1,25. Las ruedas pertenecientes
a la segunda etapa se dimensionarán con un factor de tamaño de 1,20.
- Km es el factor de distribución de carga para resistencia flexionante, se fijará el valor de
este coeficiente para todos los engranes de la caja en 1,00.
- Kv es el factor dinámico para la resistencia flexionante. Se calcula mediante la siguiente
expresión:
"� = I� + S200 · �3� Jz
Donde: � = 50 + 56 · (1,0 − �)
� = (12 − ��)g,���4
� Qv es el número de calificación de la exactitud de la transmisión. Se escoge un grado
de exactitud 7, como unidad comercial, para toda la transmisión a diseñar.
� Vt es la velocidad de la línea de paso (en m/s).
Una de las variables de éste factor es la velocidad de la línea de paso, que es particular de
cada engranaje por lo que se calculará más adelante de manera individualizada.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 38 de 114
- Ft es la fuerza tangencial en la punta del diente (en N). Calculada en el apartado (1.5.1)
para todas las ruedas de la primera etapa.
-b es el ancho de cara del diente (en mm.).
-J es el factor geométrico del engrane. Depende del número de dientes de las ruedas en
contacto, del lugar de aplicación de la carga y del ángulo de presión empleado. El ángulo de
presión será de 20º en todas las ruedas.
Figura 13
-m es el módulo métrico normalizado (en mm.).

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 39 de 114
El valor de este esfuerzo flexionante calculado se compara con un esfuerzo admisible
dependiente del material seleccionado y del tratamiento térmico aplicado sobre el mismo.
Éste esfuerzo admisible se corrige con una serie de coeficientes modificadores que se
describen a continuación. La expresión empleada para el esfuerzo admisible corregido es la
siguiente:
-′#3 = �� · -#3-� · "� (5. N. 6)
Donde:
• Sat es el esfuerzo de flexión admisible para el material empleado:
-#3 = 448,16 &�;
• YN es el factor de duración, dependiente del número de ciclos de carga que experimenta
la rueda en cuestión durante su vida de diseño. Se definió en apartados anteriores la vida
del aerogenerador en veinte años, sin embargo no funcionará ininterrumpidamente por lo
que se estimará un porcentaje de tiempo de funcionamiento y a partir de ahí se
determinará el factor YN. Se realizará el cálculo del número de ciclos a los que está sometido el brazo porta-satélites
para hallar el factor de duración que se considerará común a todas las ruedas de la caja.
El número de ciclos que soporta esta rueda es función de su velocidad y de la vida de
diseño del sistema, estimando un porcentaje de funcionamiento del 80%:
20 ;ñ�w · 365 <í;w;ñ� · 24 ℎ�p;w<í; · 60 �umiv�wℎ�p; · 0,8 = 8.409.600 �umiv�w
1 �u�j�p���ji�uóm · 22,16 p���ji�u�m�w�umiv� = 22,16 �u�j�w/�umiv�
�y = 8.409.600 �umiv�w · 22,16 �u�j�w�umiv� = 186.356.736 �u�j�w ≅ 2 · 10��u�j�w
La fórmula empleada para el cálculo de este factor sobre engranajes cementados por
encima de 107 ciclos es la siguiente:
�� = 1,6831 · �yfg,g>=> = 1,6831 · (2 · 10�)fg,g>=> = 0,90

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 40 de 114
• SF es el factor de seguridad, que se fijará como parte del procedimiento de
determinación del ancho de cara mínimo en un valor de 1,00 para todas las ruedas de la
multiplicadora.
• KR es el factor de fiabilidad. Para una fiabilidad de 99% o más, se emplea la siguiente
expresión:
"� = 0,5 − 0,25 · log(1 − �) = 0,5 − 0,25 · log(1 − 0,99) = 1
Al no haber variaciones respecto al esfuerzo admisible del material ni respecto a los
coeficientes empleados, se puede calcular el esfuerzo flexionante admisible corregido que será
válido para todos los engranajes de la caja multiplicadora:
-′#3 = 0,90 · 448,161 · 1 = 404,83 &�;
El valor del ancho de cara mínimo de las ruedas para esfuerzo flexionante se obtiene igualando
las ecuaciones (1.5.1) y (1.5.2). Al despejar, la expresión se reduce a:
| = "� · "x · "+ · " · �3-′#3 · � · � (5. N. ?)
1.5.3.2 Esfuerzo de contacto
Para esfuerzo de contacto o picadura, se emplea la siguiente fórmula de AGMA [17]:
-Y = �o · C"� · "� · "+ · "� · �3| · � · <o (5. N. H)
Donde:
- -Y es el esfuerzo de contacto o picadura que soportan los dientes (en MPa).
-�o es el coeficiente elástico, que para engranajes de acero adopta un valor constante de
191 MPa1/2
.
-Los coeficientes "�, "�, "+, "�, �3 y | fueron introducidos en (1.5.3.1) , ya que los valores
son iguales para ambos esfuerzos.
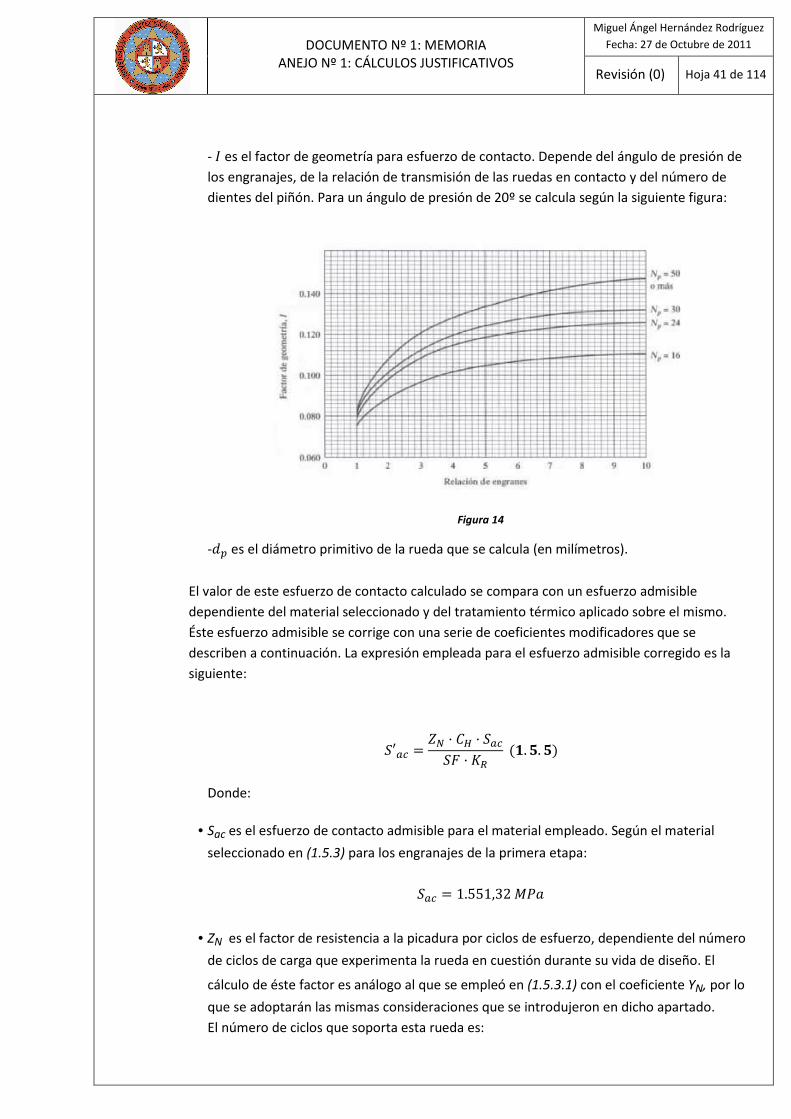
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 41 de 114
- � es el factor de geometría para esfuerzo de contacto. Depende del ángulo de presión de
los engranajes, de la relación de transmisión de las ruedas en contacto y del número de
dientes del piñón. Para un ángulo de presión de 20º se calcula según la siguiente figura:
Figura 14
-<o es el diámetro primitivo de la rueda que se calcula (en milímetros).
El valor de este esfuerzo de contacto calculado se compara con un esfuerzo admisible
dependiente del material seleccionado y del tratamiento térmico aplicado sobre el mismo.
Éste esfuerzo admisible se corrige con una serie de coeficientes modificadores que se
describen a continuación. La expresión empleada para el esfuerzo admisible corregido es la
siguiente:
-′#Y = n� · �� · -#Y-� · "� (5. N. N)
Donde:
• Sac es el esfuerzo de contacto admisible para el material empleado. Según el material
seleccionado en (1.5.3) para los engranajes de la primera etapa:
-#Y = 1.551,32 &�;
• ZN es el factor de resistencia a la picadura por ciclos de esfuerzo, dependiente del número
de ciclos de carga que experimenta la rueda en cuestión durante su vida de diseño. El
cálculo de éste factor es análogo al que se empleó en (1.5.3.1) con el coeficiente YN, por lo
que se adoptarán las mismas consideraciones que se introdujeron en dicho apartado.
El número de ciclos que soporta esta rueda es:

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 42 de 114
�y = 2,00 · 10��u�j�w
La fórmula empleada para el cálculo de este factor sobre engranajes cementados por
encima de 107 ciclos es la siguiente:
n� = 2,466 · �yfg,g�� = 2,466 · (2,00 · 10�)fg,g�� = 0,84
Este valor se conservará para el cálculo de todas las ruedas de la caja.
• SF y KR fueron introducidos en (1.5.3.1) y adoptan los mismos valores que en el esfuerzo de
flexión.
• �� es el factor por relación de durezas, se tomará como 1,00 para todas las ruedas de la
caja.
Por lo tanto, el esfuerzo de contacto admisible para los engranajes de la primera etapa es:
-′#Y = 0,83 · 1.551,321 · 1 = 1.287,59 &�;
El valor del ancho de cara mínimo de las ruedas para esfuerzo de contacto se obtiene
igualando las ecuaciones (1.5.4) y (1.5.5). Al despejar, la expresión se reduce a:
| = �t= · "� · "x · "+ · " · �3-′#Y= · � · <t (5. N. R)

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 43 de 114
1.5.3.3 Satélites
Teniendo en cuenta lo expuesto anteriormente en (1.5.3) se llevará a cabo a continuación la
determinación de los miembros de las ecuaciónes (1.5.3) y (1.5.6) para el dimensionado de
los satélites por esfuerzo de flexión y por esfuerzo de contacto.
1.5.3.3.1 Esfuerzo de flexión
� Fuerza tangencial Ft. �3 = 565,082 "�
� Factor de sobrecarga Ko.
"� = 1,25
� Factor de tamaño Ks.
"x = 1,25
� Factor de distribución de carga Km.
"+ = 1,00
� Factor de velocidad Kv.
� = (12 − ��)g,���4 = (12 − 7)g,���4 = 0,73
� = 50 + 56 · (1,0 − 0,73) = 65,12
�3� = (�) · 2Y − �� · 2�) · �60 · 1000 = (22,16 · 1536 − 38,18 · 564) · �60000 = 0,65 �/w
"� = I� + S200 · �3� Jz = �65,12 + S200 · 0,6565,12 �g,�> = 1,12
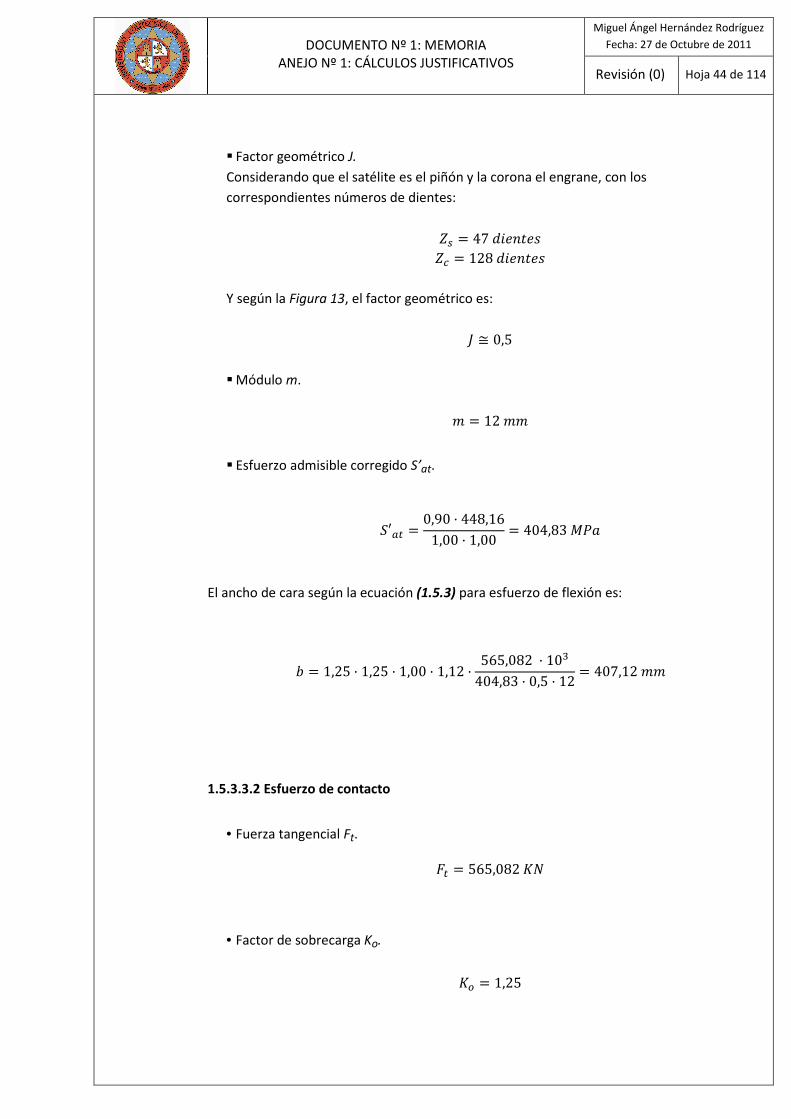
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 44 de 114
� Factor geométrico J.
Considerando que el satélite es el piñón y la corona el engrane, con los
correspondientes números de dientes:
n� = 47 <u�mv�w nY = 128 <u�mv�w
Y según la Figura 13, el factor geométrico es:
� ≅ 0,5
� Módulo m.
� = 12 ��
� Esfuerzo admisible corregido S’at.
-′#3 = 0,90 · 448,161,00 · 1,00 = 404,83 &�;
El ancho de cara según la ecuación (1.5.3) para esfuerzo de flexión es:
| = 1,25 · 1,25 · 1,00 · 1,12 · 565,082 · 10>404,83 · 0,5 · 12 = 407,12 ��
1.5.3.3.2 Esfuerzo de contacto
• Fuerza tangencial Ft. �3 = 565,082 "�
• Factor de sobrecarga Ko.
"� = 1,25

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 45 de 114
• Coeficiente elástico Cp.
�o = 191 &�;A =L
• Factor de tamaño Ks.
"x = 1,25
• Factor de distribución de carga Km.
"+ = 1,00
• Factor de velocidad Kv.
"� = I� + S200 · �3� Jz = �65,12 + S200 · 0,6565,12 �g,�> = 1,12
• Factor geométrico I.
Considerando un ángulo de presión de 20º y que el satélite es el piñón y la corona el
engrane, con los correspondientes números de dientes:
n� = 47 <u�mv�w nY = 128 <u�mv�w
Según lo anterior y la Figura 14, el factor geométrico es:
� ≅ 0,119
• Diámetro primitivo dp.
<o = 564 ��
• Esfuerzo admisible corregido S’ac.
-′#Y = 0,84 · 1.551,32 · 1,001,00 · 1,00 = 1.303,11 &�;
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 46 de 114
El ancho de cara según la ecuación (1.5.6) para esfuerzo de contacto es:
| = 191= · 1,25 · 1,25 · 1,00 · 1,12 · 565,082 · 10>1.303,11= · 0,119 · 564 = 316,54 ��
El ancho de cara definitivo escogido será por lo tanto el calculado a criterio de esfuerzo de
flexión, por ser éste un valor más sobredimensionado que el que se determinó por esfuerzo
de contacto. Éste valor será redondeado al alza por motivos de simplicidad constructiva:
| = 410 ��
Este ancho será el que se emplee para realizar el dimensionado de los engranajes satélites,
corona y planetario.
1.5.3.4 Corona
Tal y como se explicó en secciones anteriores, los satélites al ser las ruedas que soportan
mayor solicitación, condicionan las dimensiones de los demás engranes. Por lo tanto, el ancho
de cara para la corona será el mismo que el determinado para los satélites:
| = 410 ��
1.5.3.5 Planeta
Por motivos expuestos en secciones previas, el ancho de cara del engranaje planeta es:
| = 410 ��
1.5.4 Dimensionado del disco porta-satélites
A continuación se expondrán los cálculos aplicados y las consideraciones llevadas a cabo para
determinar el espesor mínimo del disco porta-satélites de la primera etapa.
Se considerará el disco como una viga de sección rectangular empotrada con una carga aplicada
en su extremo en voladizo trabajando a flexión como hipótesis para el cálculo del espesor del
disco porta-satélites.
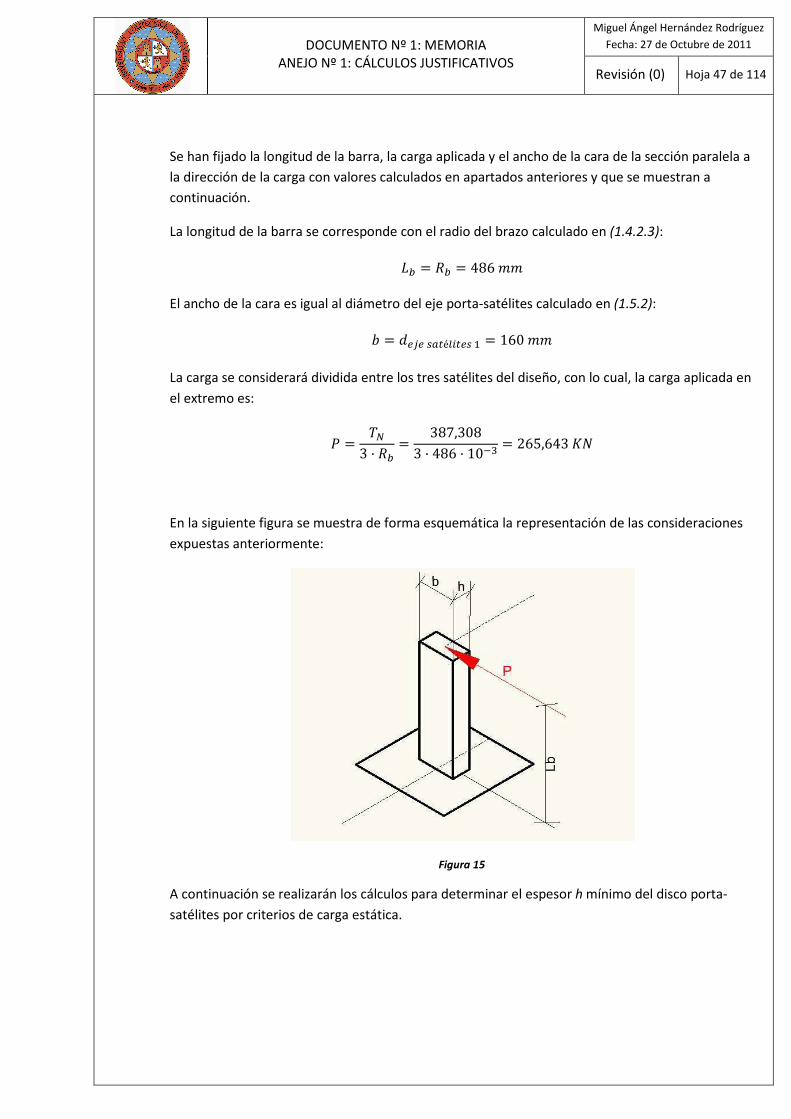
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 47 de 114
Se han fijado la longitud de la barra, la carga aplicada y el ancho de la cara de la sección paralela a
la dirección de la carga con valores calculados en apartados anteriores y que se muestran a
continuación.
La longitud de la barra se corresponde con el radio del brazo calculado en (1.4.2.3): () = �) = 486 ��
El ancho de la cara es igual al diámetro del eje porta-satélites calculado en (1.5.2): | = <�Z� �#3éq�3�� A = 160 ��
La carga se considerará dividida entre los tres satélites del diseño, con lo cual, la carga aplicada en
el extremo es:
� = ��3 · �) = 387,3083 · 486 · 10f> = 265,643 "�
En la siguiente figura se muestra de forma esquemática la representación de las consideraciones
expuestas anteriormente:
Figura 15
A continuación se realizarán los cálculos para determinar el espesor h mínimo del disco porta-
satélites por criterios de carga estática.
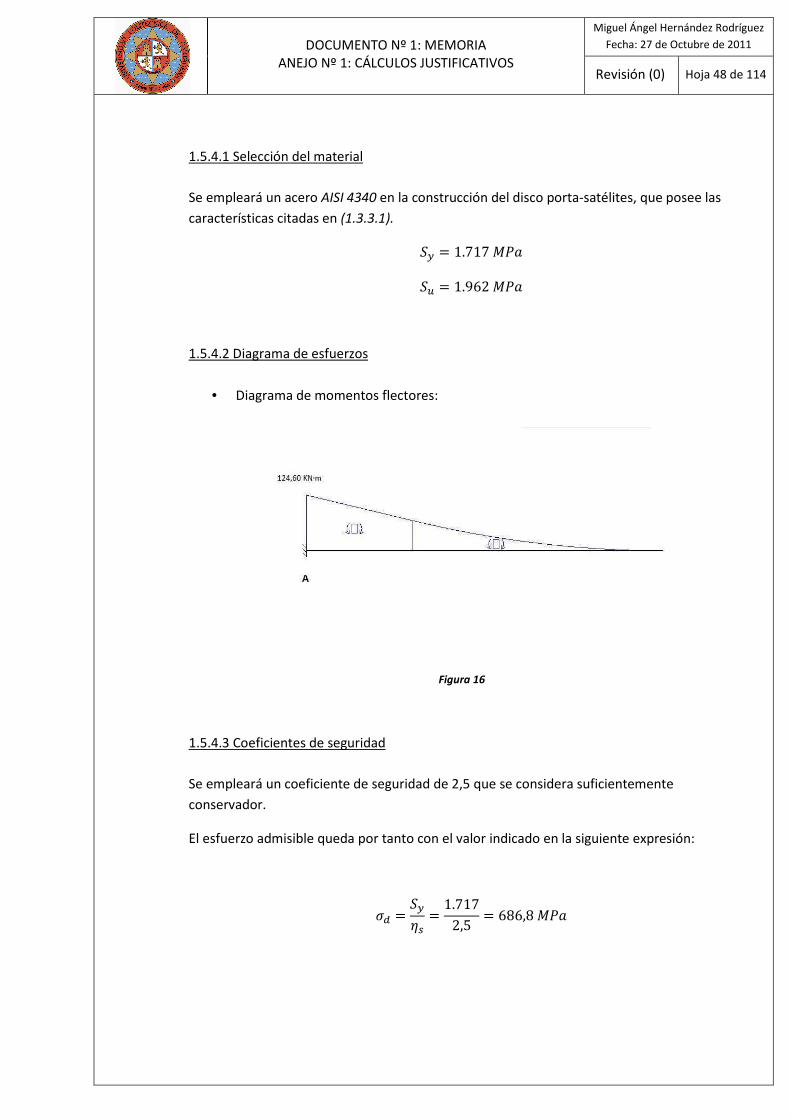
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 48 de 114
1.5.4.1 Selección del material
Se empleará un acero AISI 4340 en la construcción del disco porta-satélites, que posee las
características citadas en (1.3.3.1). -. = 1.717 &�; -c = 1.962 &�;
1.5.4.2 Diagrama de esfuerzos
• Diagrama de momentos flectores:
Figura 16
1.5.4.3 Coeficientes de seguridad
Se empleará un coeficiente de seguridad de 2,5 que se considera suficientemente
conservador.
El esfuerzo admisible queda por tanto con el valor indicado en la siguiente expresión:
,� = -.�� = 1.7172,5 = 686,8 &�;

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 49 de 114
1.5.4.4 Esfuerzos principales
Al haber considerado rectangular la sección de la barra los esfuerzos principales se calculan de
manera diferente a como se hizo en apartados análogos anteriores.
-Esfuerzo normal:
,$ = & · ��
Donde:
-M es el momento flector en la sección analizada (en KN·m):
& = 124,60 "� · �
-c es la distancia al eje neutro (en m). Para el caso de sección rectangular esta distancia es:
� = |2 = 160 · 10f>2 = 80 · 10f> �
-I es el momento de inercia de la sección (en m4). En el caso de sección rectangular es:
� = ℎ · |>12 = ℎ · 3,41 · 10f� ��
El esfuerzo normal es por lo tanto:
,$ = & · �� = 124,60 · 80 · 10f>ℎ · 3,41 · 10f� = 29.231,67ℎ

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 50 de 114
-Esfuerzo cortante:
No se aplica ninguna carga que produzca esfuerzo cortante sobre la sección.
Empleando las sustituciones y simplificaciones utilizadas en el cálculo análogo de los ejes
anteriores se obtiene la siguiente expresión para el cálculo de los esfuerzos principales:
,A, ,= = 29.231,67ℎ ± CI29.231,67ℎ J=
,A = 58.463,34ℎ
,= = − 58.463,34ℎ
1.5.4.5 Criterio de Von Misses
La aplicación de este criterio ya fue explicada en (1.3.3.4). Según la ecuación (1.3.5):
(,A= + ,== − ,A · ,=)A =L ≥ -.��
�F58.463,34ℎ G= + F− 58.463,34ℎ G= − F58.463,34ℎ G · F− 58.463,34ℎ G�A =L ≥ 686,8
√3 · F58.463,34ℎ G ≥ 686.800
El espesor mínimo del disco según la expresión de este criterio de falla es:
ℎ = 147,44 ��
1.5.4.6 Criterio de Tresca
La aplicación de este criterio ya fue explicada en (1.3.3.5). Según la fórmula (1.3.7):
|,A − ,=| ≥ -.��
2 · F58.463,34ℎ G = 686.800
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 51 de 114
El espesor según este criterio de falla es:
ℎ = 169,93 ��
Se escogerá la solución obtenida según el criterio de Tresca para el espesor mínimo del disco, por
ofrecer unas dimensiones más conservadoras, no obstante, éste valor será redondeado al alza:
ℎ = 170 ��
1.6 DIMENSIONADO 2ª ETAPA MULTIPLICADORA
1.6.1 Cálculo de fuerzas en los engranajes
En este apartado se calcularán las fuerzas actuantes en la segunda etapa del tren epicicloidal. Se
procederá con los cálculos con las mismas consideraciones adoptadas para el dimensionado de la
primera etapa de multiplicación.
1.6.1.1 Planeta
La fuerza tangencial transmitida se obtiene a partir del par transmitido y el diámetro de la
rueda, conocidos los datos de potencia y velocidad nominales.
�t = 30 · � � · �t = 30 · 900� · 1.500 = 5,729 "� · �
�tfx = 2 · �o2t = 2 · 5,729400 · 10f> = 28,645 "�
Ésta es la fuerza total transmitida a los tres satélites por el engranaje planetario.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 52 de 114
1.6.1.2 Satélites
Los satélites reciben el par torsor del brazo porta-satélites y reparten la fuerza resultante entre
la corona y el engranaje planetario.
�x = 30 · � � · �x = 30 · 900� · 312,50 = 27,500 "� · �
�x = �xft + �xfy
�x = 2 · �x2x = 2 · 27,500560 · 10f> = 98,214 "�
Ésta es la fuerza total que transmiten los satélites.
Así, conocida la fuerza total transmitida por el satélite y la fuerza impulsora del engranaje
planetario, para conocer la fuerza que actúa sobre la corona basta con restar ambos valores:
�xfy = �x − �xft �xfy = 98,214 − 28,645 = 69,569 "�
El punto en contacto entre el satélite y la corona es el más solicitado como se puede apreciar
en el valor de la fuerza calculada anteriormente, por lo tanto, será este valor el que se use para
dimensionar el engranaje satélite.
1.6.1.3 Corona
La fuerza que cada satélite ejerce sobre la corona se calculó en el apartado anterior.
�xfy = 69,569 "�
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 53 de 114
1.6.2 Dimensionado del eje porta-satélites
Para el dimensionado de este eje se procederá de igual manera a como se realizó con el eje
homónimo de la primera etapa, es decir se realizarán los cálculos de las dimensiones por criterios
de fatiga y posteriormente se llevará a cabo una comprobación a carga estática.
Se modelizará como un único brazo que soporta toda la carga a potencia nominal como criterio de
sobredimensionamiento.
La fuerza transmitida es por tanto:
�ztfx = 2 · �zt2zt = 2 · 47,146960 · 10f> = 98,220 "�
Se considera el eje como una viga empotrada en voladizo, la fuerza actuante se introduce como
una carga uniformemente distribuida a lo largo de todo el ancho de cara del engranaje satélite
calculado en (1.6.3.3).
Por lo tanto, la carga distribuida tendrá un valor de:
{ = �ztfx|x = 98,22090 · 10f> = 1.091,333 "�/�
El par torsor aplicado es constante sobre todo el eje y tiene el valor calculado en (1.5.1.2) :
�x = 30 · � � · �x = 30 · 900� · 312,50 = 27,500 "� · �
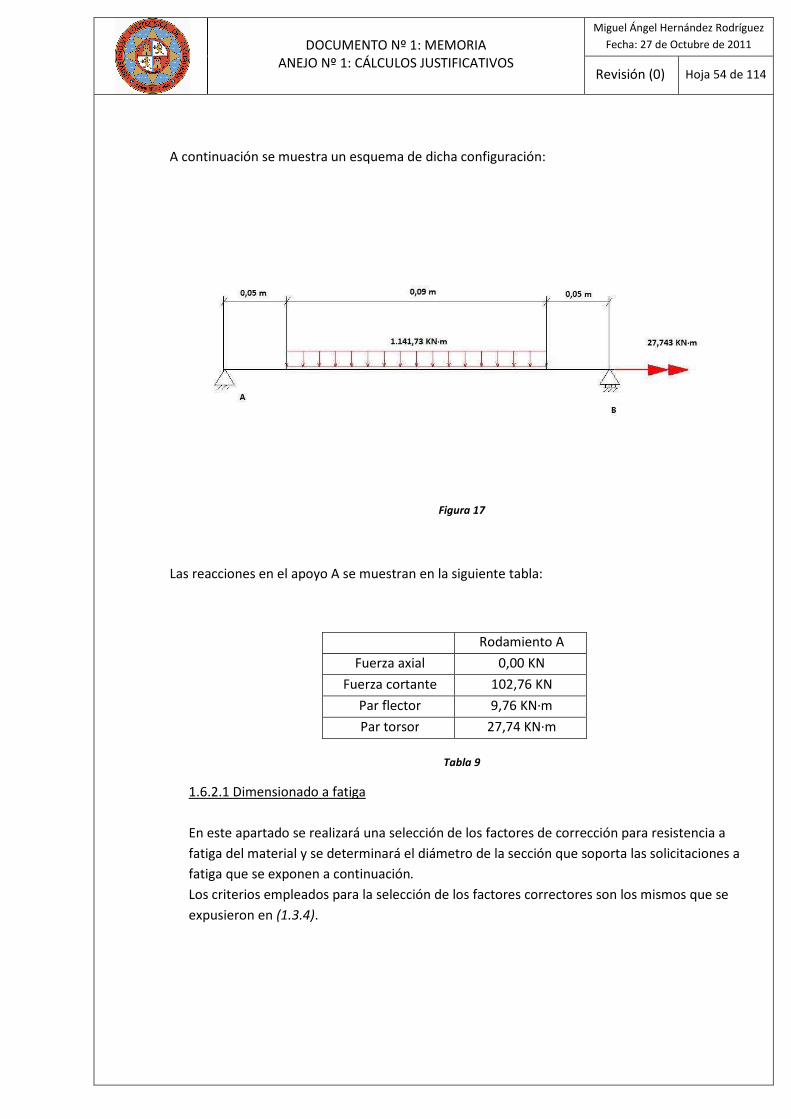
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 54 de 114
A continuación se muestra un esquema de dicha configuración:
Figura 17
Las reacciones en el apoyo A se muestran en la siguiente tabla:
Rodamiento A
Fuerza axial 0,00 KN
Fuerza cortante 102,76 KN
Par flector 9,76 KN·m
Par torsor 27,74 KN·m
Tabla 9
1.6.2.1 Dimensionado a fatiga
En este apartado se realizará una selección de los factores de corrección para resistencia a
fatiga del material y se determinará el diámetro de la sección que soporta las solicitaciones a
fatiga que se exponen a continuación.
Los criterios empleados para la selección de los factores correctores son los mismos que se
expusieron en (1.3.4).
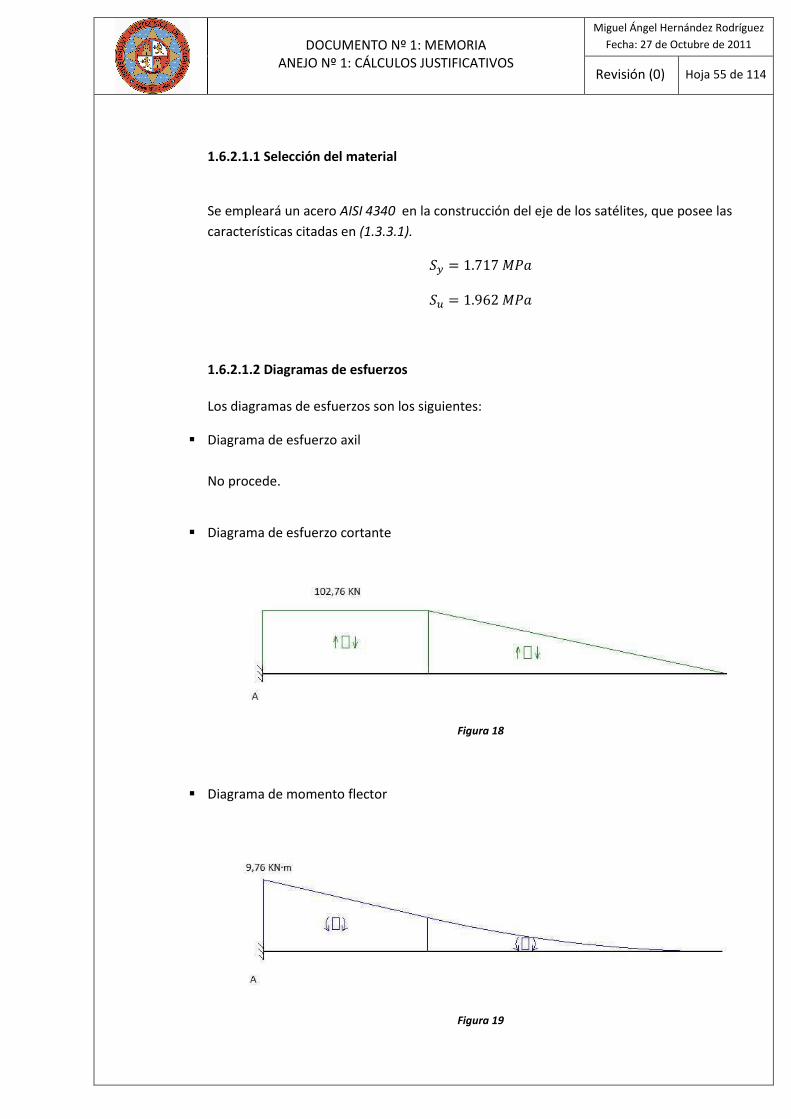
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 55 de 114
1.6.2.1.1 Selección del material
Se empleará un acero AISI 4340 en la construcción del eje de los satélites, que posee las
características citadas en (1.3.3.1). -. = 1.717 &�; -c = 1.962 &�;
1.6.2.1.2 Diagramas de esfuerzos
Los diagramas de esfuerzos son los siguientes:
� Diagrama de esfuerzo axil
No procede.
� Diagrama de esfuerzo cortante
Figura 18
� Diagrama de momento flector
Figura 19
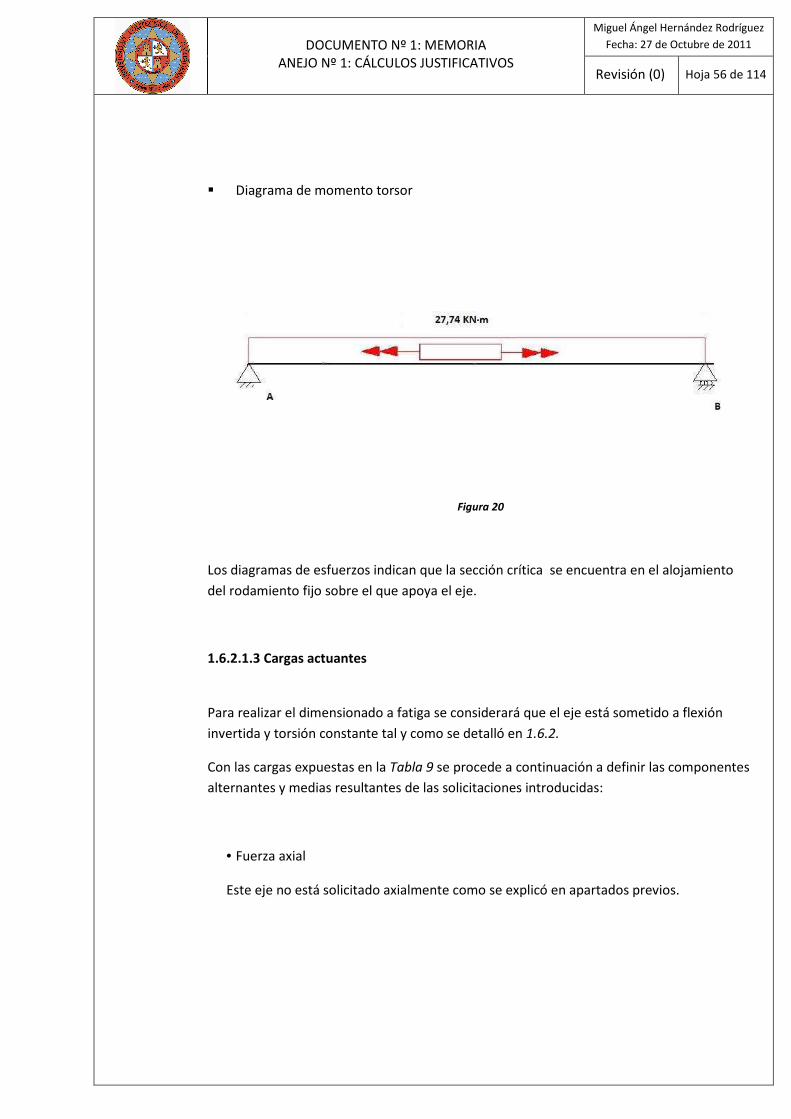
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 56 de 114
� Diagrama de momento torsor
Figura 20
Los diagramas de esfuerzos indican que la sección crítica se encuentra en el alojamiento
del rodamiento fijo sobre el que apoya el eje.
1.6.2.1.3 Cargas actuantes
Para realizar el dimensionado a fatiga se considerará que el eje está sometido a flexión
invertida y torsión constante tal y como se detalló en 1.6.2.
Con las cargas expuestas en la Tabla 9 se procede a continuación a definir las componentes
alternantes y medias resultantes de las solicitaciones introducidas:
• Fuerza axial
Este eje no está solicitado axialmente como se explicó en apartados previos.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 57 de 114
• Par torsor
El par torsor al que está sometido el eje tiene un valor constante, por lo tanto:
[�+á$ = 27,74 "� · ��+í = 27,74 "� · �^
�+ = �+á$ + �+í 2 = 27,74 + 27,742 = 27,74 KN · m (5. R. 5)
�# = �+á$ − �+í 2 = 27,74 − 27,742 = 0 "� · � (5. R. 6)
• Momento flector
La flexión producida en el eje es completamente invertida, por tanto:
[ &+á$ = 9,76 KN · m&+í = −9,76 KN · m ̂
&+ = &+á$ + &+í 2 = 9,76 + (−9,76)2 = 0 "� · � (5. R. ?)
&# = &+á$ − &+í 2 = 9,76 − (−9,76)2 = 9,76 KN · m (5. R. H)
1.6.2.1.3 Factores de corrección del límite a fatiga
El tipo de solicitación al que está sometido este eje es el mismo que se consideró en el
diseño del eje principal, por lo que para el cálculo de la seguridad a fatiga se tomarán como
válidas las expresiones y consideraciones utilizadas en el cálculo del eje de baja. Por lo
tanto, los factores correctores del límite de fatiga serán idénticos a excepción del factor de
tamaño ks, que se calculará de manera particular para este eje.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 58 de 114
-′� = 0,5 · -c3
-′� = 0,5 · 1.962 = 981 &�;
� Factor de acabado de superficie kf
d' = 0,9
� Factor de tamaño ks
El diámetro de la sección no es conocido, por lo que se empleará un valor para este
coeficiente de:
d� = 0,65
� Factor de confiabilidad kr
d� = 0,82
� Factor de temperatura kt
d3 = 1
� Factor de efectos diversos km
d+ = 1
Teniendo en cuenta los factores anteriormente detallados, se corrige el límite a fatiga de la
siguiente manera:
-� = 0,9 · 0,65 · 0,82 · 1 · 1 · 981 = 470,58 &�;
1.6.2.1.4 Factor de concentración de esfuerzos Kf
Se ha establecido un valor suficientemente conservador para este factor de:
"' = 2,25

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 59 de 114
1.6.2.1.5 Diámetro de la sección
Habiendo considerado todos los coeficientes modificadores de los apartados anteriores se
procede a continuación a determinar el diámetro mínimo del eje a fatiga con las
expresiones empleadas en (1.3.4.4), escogiendo un factor de seguridad de 1.
-.m� = CF,+ + -.-� · "' · ,#G= + 3 F@+ + -.-� · "'� · @#G=
< = ~32 · CF&+ + -.-� · "' · &#G= + 34 · F�+ + -.-� · "'� · �#G=� · m� · -.
�
< = �32 · OD0 + 1.717.000470.580 · 2,25 · 9,76E= + 34 · (27,74 + 0)=� · 1 · 1.717.000�
< = 79,17 ��
Se escogerá un valor redondeado al alza del diámetro calculado anteriormente, que será
de: <�Z� �#3éq�3�� = = 80 ��
1.6.2.2 Comprobación a carga estática
1.6.2.2.1 Criterio de Von Misses
La aplicación de este criterio fue explicada en (1.3.3.4), la fórmula de cálculo es la siguiente: 4� · <> · OP8 · &' + �#$ · <Q= + 48 · �= ≥ -.��

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 60 de 114
A diferencia de cálculos similares anteriores, en éste eje se realizará la comprobación a
carga estática en lugar del dimensionado, por lo que se despeja de la fórmula el factor de
seguridad para verificar que el diámetro de la sección calculado en 1.6.2.1.5 es válido.
�� = 1,717 · � · 80>4 · S(8 · 9,76 · 10>)= + 48 · (27,74 · 10>)= = 3,32
Como se puede comprobar el factor de seguridad es superior a 1, por lo que no habrá falla
estática según este criterio, y el diámetro calculado se considera válido.
1.6.2.2.2 Criterio de Tresca
El criterio de Tresca fue explicado en (1.3.3.5), la fórmula empleada es:
4� · <> · OP8 · &' + �#$ · <Q= + 64 · �= ≥ -.��
�� = 1,717 · � · 80>4 · S(8 · 9,76 · 10>)= + 64 · (27,74 · 10>)= = 2,93
Habiendo realizado las comprobaciones a falla estática por los dos criterios expuestos
anteriormente y tras verificar que hay seguridad bajo ambas consideraciones se tomará
como válido el valor del diámetro calculado en (1.6.2.1.6). <�Z� �#3éq�3�� = = 80 ��

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 61 de 114
1.6.3 Determinación del ancho de cara de los engranajes
Como se ha podido comprobar en el apartado anterior, los engranajes satélite son los más
solicitados, por lo que la magnitud del ancho de cara determinado en esta sección para los
satélites será la que se emplee en las demás ruedas.
Se ha seleccionado un acero de cementación AISI 4320 grado AGMA 1 [17] con una dureza
superficial mínima de 58 HRC. Tiene los siguientes números de esfuerzo admisibles:
-#3 = 379,211 &�; -#Y = 1.241,056
1.6.3.1 Esfuerzo de flexión
Se empleará la ecuación (1.5.1) de AGMA [17] utilizada en (1.5.3).
-3 = "� · "� · "+ · "� · �3| · � · �
Los coeficientes de ésta ecuación fueron explicados en (1.5.3.1) por lo que se omitirá en este
apartado dicha exposición. Se emplearán los valores de Ko, Ks, Km, y m que se definieron en la
sección anteriormente citada.
El valor de este esfuerzo flexionante calculado se comparará con un esfuerzo admisible de
igual manera que se realizó en (1.5.3.1), la expresión empleada corresponde con la ecuación
(1.5.2):
-′#3 = �� · -#3-� · "�
Los factores correctores de esta ecuación también fueron introducidos en (1.5.3.1) y sus
correspondientes valores han sido detallados de igual manera en dicha sección.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 62 de 114
El valor del ancho de cara mínimo de las ruedas para esfuerzo flexionante se obtiene igualando
las ecuaciones (1.5.1) y (1.5.2). Al despejar, la expresión se reduce a:
| = "� · "x · "+ · " · �3-′#3 · � · �
1.6.3.2 Esfuerzo de contacto
Para esfuerzo de contacto o picadura, se empleará la fórmula (1.5.6) que se extrajo de AGMA
[17] y que se empleó en el cálculo análogo de la primera etapa, con los correspondientes
factores explicados en (1.5.3.2):
-Y = �o · C"� · "� · "+ · "� · �3| · � · <o
El valor de este esfuerzo de contacto calculado se compara con el esfuerzo admisible de
contacto corregido de la ecuación (1.5.7):
-′#Y = n� · �� · -#Y-� · "�
Por tanto, el esfuerzo de contacto admisible corregido es:
-′#Y = 0,83 · 1.241,056 · 1,001,00 · 1,00 = 1.030 &�;

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 63 de 114
1.6.3.3 Satélites
Se calcula a continuación el ancho de cara de los engranajes satélites de la segunda etapa
mediante el mismo procedimiento empleado en los cálculos análogos de la primera etapa.
1.6.3.3.1 Esfuerzo de flexión
� Fuerza tangencial Ft.
�3 = 69,569 "�
� Factor de sobrecarga Ko.
"� = 1,25
� Factor de tamaño Ks.
"x = 1,20
� Factor de distribución de carga Km.
"+ = 1,00
� Factor de velocidad Kv.
� = (12 − ��)g,���4 = (12 − 7)g,���4 = 0,73
� = 50 + 56 · (1,0 − 0,73) = 65,12
�3� = (�) · 2Y − �� · 2�) · �60 · 1000 = (182,29 · 1.520 − 312,50 · 560) · �60.000 = 5,34 �/w
"� = I� + S200 · �3� Jz = �65,12 + S200 · 5,3465,12 �g,�> = 1,34
� Factor geométrico J.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 64 de 114
Considerando que el satélite es el piñón y la corona el engrane, con los
correspondientes números de dientes:
n� = 56 <u�mv�w nY = 152 <u�mv�w
Y según la Figura 13, el factor geométrico es:
� ≅ 0,5
� Módulo m.
� = 10 ��
� Esfuerzo admisible corregido S’at.
-′#3 = 0,90 · 379,2111,00 · 1,00 = 341,289 &�;
El ancho de cara según la ecuación (1.5.3) para esfuerzo de flexión es:
| = 1,25 · 1,25 · 1,00 · 1,34 · 69,569 · 10>341,289 · 0,5 · 10 = 85,36 ��
1.6.3.3.2 Esfuerzo de contacto
• Fuerza tangencial Ft. �3 = 69,569 "�
• Factor de sobrecarga Ko.
"� = 1,25

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 65 de 114
• Coeficiente elástico Cp.
�o = 191 &�;A =L
• Factor de tamaño Ks.
"x = 1,25
• Factor de distribución de carga Km.
"+ = 1,00
• Factor de velocidad Kv.
"� = I� + S200 · �3� Jz = �65,12 + S200 · 5,3465,12 �g,�> = 1,34
• Factor geométrico I.
Considerando un ángulo de presión de 20º y que el satélite es el piñón y la corona el
engrane, con los correspondientes números de dientes:
n� = 56 <u�mv�w nY = 152 <u�mv�w
Según lo anterior y la Figura 14, el factor geométrico es:
� ≅ 0,118
• Diámetro primitivo dp.
<o = 560 ��
• Esfuerzo admisible corregido S’ac.
-′#Y = 1.030 &�;
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 66 de 114
El ancho de cara según la ecuación (1.5.8) para esfuerzo de contacto es:
| = 191= · 1,25 · 1,25 · 1,00 · 1,34 · 69,569 · 10>1.030= · 0,118 · 560 = 75,80 ��
El ancho de cara definitivo escogido será por lo tanto el calculado a criterio de esfuerzo de
flexión, por ser éste un valor más sobredimensionado que el que se determinó por esfuerzo de
contacto. Éste valor será redondeado al alza por motivos de simplicidad constructiva:
| = 90 ��
Este ancho será el que se emplee para realizar el dimensionado de los engranajes satélites,
corona y planetario.
1.6.3.4 Corona
Tal y como se explicó en secciones anteriores, los satélites al ser las ruedas que soportan
mayor solicitación, condicionan las dimensiones de los demás engranes. Por lo tanto, el ancho
de cara para la corona será el mismo que el determinado para los satélites:
| = 90 ��
1.6.3.5 Planeta
Por motivos expuestos en secciones previas, el ancho de cara del engranaje planeta es:
| = 90 ��
1.6.4 Dimensionado del disco porta-satélites
En este apartado se recurrirá, como ya se hizo en (1.5.4), a un modelo de viga empotrada de
sección cuadrada con carga en voladizo aplicada en el extremo para simplificar los cálculos sobre
el espesor del disco porta-satélites en la segunda etapa. Se seguirá la nomenclatura empleada en
la figura 15.
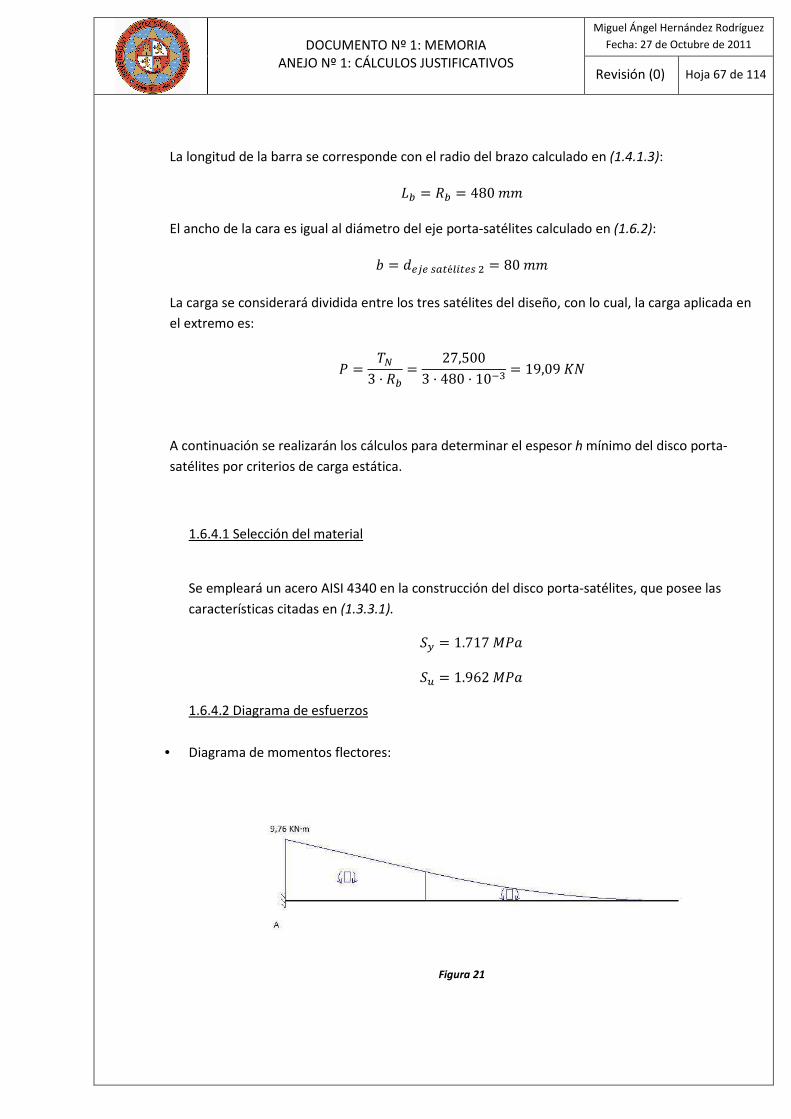
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 67 de 114
La longitud de la barra se corresponde con el radio del brazo calculado en (1.4.1.3): () = �) = 480 ��
El ancho de la cara es igual al diámetro del eje porta-satélites calculado en (1.6.2): | = <�Z� �#3éq�3�� = = 80 ��
La carga se considerará dividida entre los tres satélites del diseño, con lo cual, la carga aplicada en
el extremo es:
� = ��3 · �) = 27,5003 · 480 · 10f> = 19,09 "�
A continuación se realizarán los cálculos para determinar el espesor h mínimo del disco porta-
satélites por criterios de carga estática.
1.6.4.1 Selección del material
Se empleará un acero AISI 4340 en la construcción del disco porta-satélites, que posee las
características citadas en (1.3.3.1). -. = 1.717 &�; -c = 1.962 &�;
1.6.4.2 Diagrama de esfuerzos
• Diagrama de momentos flectores:
Figura 21
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 68 de 114
1.6.4.3 Coeficientes de seguridad
Se empleará el mismo coeficiente empleado para el cálculo del disco porta-satélites de la
primera etapa.
El esfuerzo admisible queda por tanto con el valor indicado en la siguiente expresión:
,� = -.�� = 1.7173 = 686,8 &�;
1.6.4.4 Esfuerzos principales
-Esfuerzo normal:
,$ = & · ��
Donde: & = 9,41 "� · �
� = |2 = 80 · 10f>2 = 40 · 10f> �
� = ℎ · |>12 = ℎ · 4,26 · 10f���
El esfuerzo normal es por lo tanto:
,$ = & · �� = 9,41 · 40 · 10f>ℎ · 4,26 · 10f� = 8.835,68ℎ
-Esfuerzo cortante:
No se aplica ninguna carga que produzca esfuerzo cortante sobre la sección.
Empleando las sustituciones y simplificaciones utilizadas en el cálculo análogo de los ejes
anteriores se obtiene la siguiente expresión para el cálculo de los esfuerzos principales:

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 69 de 114
,A, ,= = 8.835,68ℎ ± CI8.835,68ℎ J=
,A = 17.671,36ℎ
,= = − 17.671,36ℎ
1.6.4.5 Criterio de Von Misses
La aplicación de este criterio ya fue explicada en (1.3.3.4). Según la ecuación (1.3.5):
(,A= + ,== − ,A · ,=)A =L ≥ -.�� �F17.671,36ℎ G= + F− 17.671,36ℎ G= − F17.671,36ℎ G · F− 17.671,36ℎ G�A =L ≥ 686.800
√3 · F17.671,36ℎ G ≥ 686.800
El espesor mínimo del disco según la expresión de este criterio de falla es:
ℎ = 44,56 ��
1.6.4.6 Criterio de Tresca
La aplicación de este criterio ya fue explicada en (1.3.3.5). Según la ecuación (1.3.7):
|,A − ,=| ≥ -.*+*'
2 · F17.671,36ℎ G = 686.800
El espesor mínimo según este criterio de falla es:
ℎ = 51,45 ��
Se escogerá la solución obtenida según el criterio de Tresca para el espesor mínimo del disco, por
ofrecer unas dimensiones más conservadoras, no obstante, éste valor será redondeado al alza:
ℎ = 52 ��
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 70 de 114
1.7 DIMENSIONADO EJE INTERMEDIO
El eje intermedio se encuentra acoplado al eje planetario de la primera etapa y al disco porta-
satélites de la segunda etapa transmitiendo la potencia entre ambos elementos. En este capítulo se
procederá al diseño del eje por criterios de solicitación estática, analizando las secciones más
desfavorables y realizando una comprobación a falla de fatiga con las dimensiones calculadas.
1.7.1 Determinación de las cargas sobre el eje
Los satélites de ambas etapas se encuentran dispuestos equidistantes entre sí, de manera que las
fuerzas cortantes y momentos flectores que se pudieran inducir sobre este eje se suponen
equilibradas y pueden despreciarse.
Teniendo en cuenta la consideración anterior, el eje intermedio se estudiará como una barra
sometida únicamente a esfuerzo de torsión.
El par torsor aplicado sobre el eje intermedio para realizar el dimensionado se considera
constante a lo largo de todo el eje, y tiene el valor calculado en (1.5.1.1): �t = 47,146 "� · �
1.7.2 Dimensionado a carga estática
1.7.2.1 Diagramas de esfuerzos
• Diagrama de esfuerzo axil:
No procede.
• Diagrama de esfuerzo cortante
No procede.
• Diagrama de momento flector
No procede.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 71 de 114
1.7.2.2 Selección del material
Se empleará un acero AISI 4340 en la construcción del eje intermedio, que posee las
características citadas en (1.3.3.1). -. = 1.717 &�; -c = 1.962 &�;
1.7.2.3 Coeficientes de seguridad
Se emplearán los mismos coeficientes que se usaron para el dimensionado del eje de baja en
(1.3.3.2).
El esfuerzo admisible queda por tanto con el valor indicado en la siguiente expresión:
,� = -.*+ · *' = 1.7173 · 3 = 190,77 &�;
1.7.2.4 Esfuerzos principales
-Esfuerzo normal:
,$ = 4 · �#$� · <= + 32 · &'� · <> = 0
-Esfuerzo cortante:
@$. = 16 · �� · <> = 16 · 47,26 · 10>� · <>

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 72 de 114
Empleando las sustituciones y simplificaciones utilizadas en el cálculo análogo de los ejes
anteriores se obtiene la siguiente expresión para el cálculo de los esfuerzos principales:
,A, ,= = 0 ± C0= + I16 · 47,26 · 10>� · <> J=
1.7.2.5 Criterio de Von Misses
La aplicación de este criterio fue explicada en (1.3.3.4), la fórmula de cálculo es la siguiente: 4� · <> · OP8 · &' + �#$ · <Q= + 48 · �= ≥ -.*+ · *' 4� · <> · S48 · (47,26 · 10>)= ≥ 1,7173 · 3
El diámetro mínimo según el criterio de Von Misses es de: < � T����� = 129,35 ��
1.7.2.6 Criterio de Tresca
El criterio de Tresca fue explicado en(1.3.3.5) , la fórmula empleada es:
4� · <> · S64 · �= ≥ -.*+ · *' 4� · <> · S64 · (47,26 · 10>)= ≥ 1,7173 · 3
Con este caso se consigue un diámetro de eje mayor que con el criterio anterior:
<X���Y# = 136,14 ��
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 73 de 114
Habiendo realizado las iteraciones para el cálculo del diámetro por los dos criterios de falla antes
expuestos y tras analizar los resultados se ha estimado tomar como válido el criterio de Tresca por
ofrecer un valor de la sección más conservador y sobredimensionado que el criterio de Von
Misses. Así pues se escogerá un valor del diámetro redondeado al alza de:
<�Z� � 3��+���� = 140 ��
1.7.3 Comprobación a fatiga
En este apartado se realizará una selección de los factores de corrección para resistencia a fatiga
del material y se comprobará el diámetro calculado en la sección anterior bajo el régimen de
cargas que se expuso en (1.7.1).
El procedimiento de cálculo y los criterios empleados para la selección de los factores correctores
son los mismos que se expusieron en (1.3.4).
1.7.3.1 Cargas actuantes
Para realizar la comprobación a fatiga se considerará que el eje está sometido a torsión
constante tal y como se detalló en (1.7.1).
Con los resultados obtenidos en el cálculo de cargas del apartado (1.7.1) se procede a
continuación a definir las componentes alternantes y medias resultantes de las solicitaciones
introducidas:
� Fuerza axial
Este eje no está solicitado axialmente como se explicó en apartados previos.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 74 de 114
� Par torsor
El par torsor al que está sometido el eje tiene un valor constante, por lo tanto:
[�+á$ = 47,26 "� · ��+í = 47,26 "� · �^
�+ = �+á$ + �+í 2 = 47,26 + 47,262 = 47,26 KN · m
�# = �+á$ − �+í 2 = 47,26 − 47,262 = 0 "� · �
� Momento flector
Éste eje no está sometido a momentos flectores como se explicó en apartados anteriores.
1.7.3.2 Factores de corrección del límite a fatiga
El tipo de solicitación al que está sometido este eje es el mismo que se consideró en el diseño
del eje principal, por lo que para el cálculo de la seguridad a fatiga se tomarán como válidas las
expresiones y consideraciones utilizadas en el cálculo del eje de baja. Por lo tanto, los factores
correctores del límite de fatiga serán idénticos a excepción del factor de tamaño ks, que se
calculará de manera particular para este eje y el factor de concentración de esfuerzos a flexión
Kf que no será aplicable sobre este eje.
-′� = 0,5 · -c3
-′� = 0,5 · 1.962 = 981 &�;

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 75 de 114
� Factor de acabado de superficie kf
d' = 0,9
� Factor de tamaño ks
El factor de tamaño para una barra de sección circular que gira se determina con las
siguientes consideraciones [14]:
d� = e 0,869 · <fg,AA= 0,3 hij� < < < 10 hij� 1 < ≤ 8 �� 1,189 · <fg,AA= 8 �� < < ≤ 250 �� ̂
El diámetro del eje es menor de 250 mm, por lo que se empleará la fórmula
correspondiente:
d� = 1,189 · <fg,AA= = 1,189 · 140fg,AA= = 0.57
� Factor de confiabilidad kr
d� = 0,82
� Factor de temperatura kt
d3 = 1
� Factor de efectos diversos km
d+ = 1
Teniendo en cuenta los factores anteriormente detallados, se corrige el límite a fatiga de la
siguiente manera:
-� = 0,9 · 0,57 · 0,82 · 1 · 1 · 981 = 412,66 &�;

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 76 de 114
1.7.3.3 Factor de concentración de esfuerzos a flexión Kf
Éste eje no está sometido a esfuerzos de flexión como se explicó anteriormente, por lo que no
será necesario considerar éste factor.
1.7.3.4 Factor de seguridad a fatiga
Habiendo considerado todos los coeficientes modificadores de los apartados anteriores se
procede a continuación a determinar el grado de seguridad de la pieza a fatiga con el diámetro
de la sección calculado en (1.7.2) y las expresiones empleadas en (1.3.4.4).
-.m� = CF,+ + -.-� · "' · ,#G= + 3 F@+ + -.-� · "'� · @#G=
m� = � · <> · -.32 · CF&+ + -.-� · "' · &#G= + 34 · F�+ + -.-� · "'� · �#G=
m� = � · 0,140> · 1.717.00032 · O34 · 47,26=
m� = 11,3
El coeficiente de seguridad es superior a 1, por lo tanto el esfuerzo a fatiga soportado por el
eje es inferior al esfuerzo admisible por el material empleado. Al haber escogido coeficientes y
supuestos que sobredimensionan considerablemente los esfuerzos aplicados se acepta como
válido éste coeficiente de seguridad y por consiguiente los cálculos y estimaciones
preliminares adoptadas.
Nótese que las magnitudes en las que se expresan los valores de la fórmula anterior son:
-Sy y Se en Kilopascales (KPa).
-d en Metros (m).
-Ma y Tm en Kilonewtons por metro (KN·m).

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 77 de 114
1.8 DIMENSIONADO EJE ALTA VELOCIDAD
El eje de alta velocidad está situado entre el generador y la caja multiplicadora y transmite la
potencia generada por el viento a elevadas revoluciones pero a valores de par torsor reducidos.
Ni la caja multiplicadora ni el generador, entendidos ambos como extremos del eje, introducen
ninguna carga sobre éste excepto la ya mencionada del par torsor transmitido. Por lo tanto
estableciendo una comparativa con el eje de baja velocidad, los esfuerzos soportados por este
componente son muy inferiores como se podrá comprobar en los sucesivos apartados, permitiendo
así simplificaciones en los cálculos que más adelante se detallan.
1.8.1 Determinación de las cargas sobre el eje
Como se ha apuntado en la sección introductoria, las cargas actuantes en el eje de alta velocidad
se reducen a un esfuerzo torsor únicamente, ya que los elementos acoplados no inducen cargas
adicionales sobre el mismo.
Por consiguiente los valores de las fuerzas cortante y axial y el momento flector se consideran
nulos. � = 0 � �#$ = 0 � &' = 0 �
-Par torsor
� = 30 · � � · � · � = 30 · 900.0000,7 · � · 1.500 = 8.185,11 � · �
1.8.2 Diagramas de esfuerzos
� Diagrama de esfuerzo axial
No procede.
� Diagrama de esfuerzo cortante
No procede.
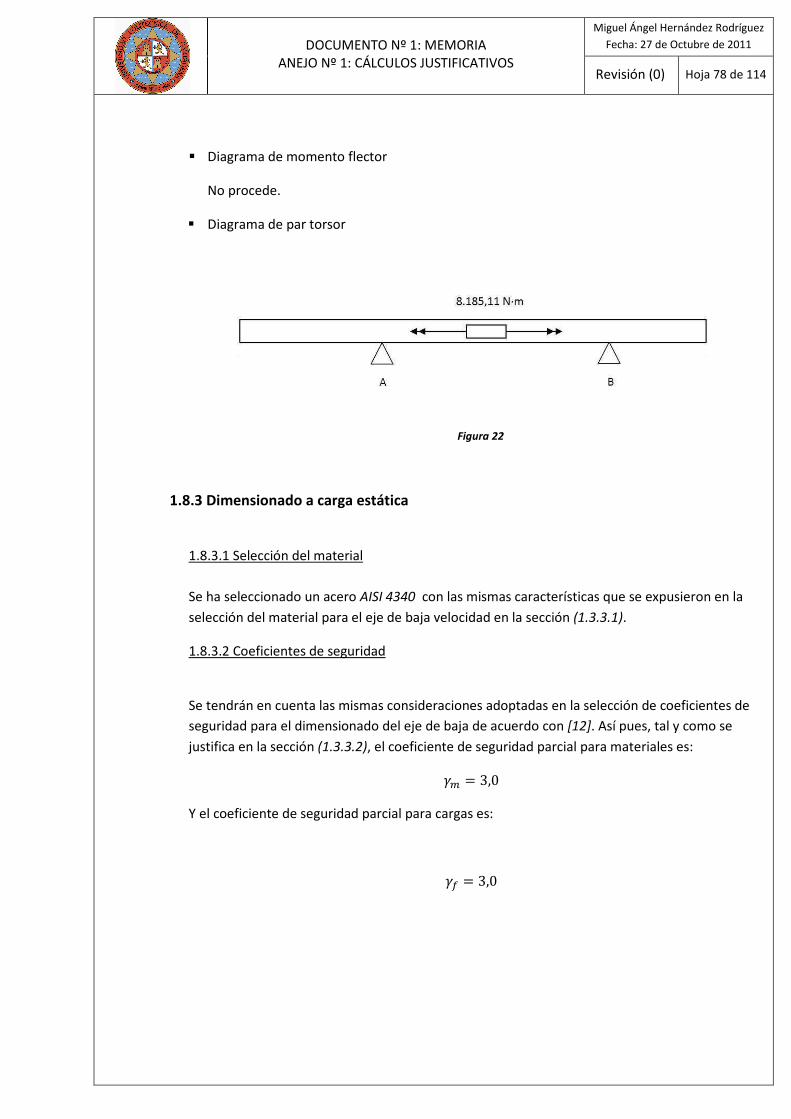
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 78 de 114
� Diagrama de momento flector
No procede.
� Diagrama de par torsor
Figura 22
1.8.3 Dimensionado a carga estática
1.8.3.1 Selección del material
Se ha seleccionado un acero AISI 4340 con las mismas características que se expusieron en la
selección del material para el eje de baja velocidad en la sección (1.3.3.1).
1.8.3.2 Coeficientes de seguridad
Se tendrán en cuenta las mismas consideraciones adoptadas en la selección de coeficientes de
seguridad para el dimensionado del eje de baja de acuerdo con [12]. Así pues, tal y como se
justifica en la sección (1.3.3.2), el coeficiente de seguridad parcial para materiales es: *+ = 3,0
Y el coeficiente de seguridad parcial para cargas es:
*' = 3,0

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 79 de 114
El esfuerzo permisible es por lo tanto:
,� = -.*+ · *' = 1.7173,0 · 3,0 = 190,77 &�;
1.8.3.3 Esfuerzos principales
En esta sección solo se desarrollan esfuerzos de torsión, por lo tanto:
-Esfuerzo normal:
,$ = 4 · �#$� · <= + 32 · &'� · <> = 4 · 0� · <= + 32 · 0� · <> = 0 &�;
-Esfuerzo cortante:
@$. = 16 · �� · <> = 16 · 8.185� · <>
Los esfuerzos principales se calculan mediante la ecuación (1.3.3) :
,A, ,= = ,$2 ± CD,$2 E= + @$.=
En este caso, al tener únicamente esfuerzo torsor la ecuación anterior se simplifica de la
siguiente manera:
,A, ,= = 0 ± C0= + F16 · 8.185� · <> G=

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 80 de 114
,A = @A = 16 · 8.185� · <>
,= = 0
,> = @> = − 16 · 8.185� · <>
@> = −@A
En los apartados siguientes se calculará el diámetro por los mismos criterios de falla
empleados en el capítulo (1.3).
1.8.3.4 Criterio de Von Misses
Para un estado de esfuerzos biaxial suponiendo ,> = 0 : ,� = (,A= + ,== − ,A · ,=)A =L ,� = (@A= − @A · @= + @==)A =L = (@A= − @A · (−@A) + (−@A=))A =L = √3 · @A
,� = √3 · F16 · 8.185� · <> G
La falla ocurrirá si:
,� ≥ -.*+ · *'
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 81 de 114
√3 · F16 · 8.185� · <> G ≥ 1,7173 · 3
< = C√3 · 16 · 8.185 · 3 · 3� · 1,717 =� 72,33 ��
Se ha determinado la solución para el diámetro según el criterio de Von Misses en un valor de:
< � T����� = 72,33 ��
1.8.3.5 Criterio de Tresca
La falla según el criterio de Tresca se producirá si:
|,A − ,>| = 2 · @A ≥ -.*+ · *'
2 · F16 · 8,185� · <> G = 1,17173 · 3
< = C2 · 16 · 8,158 · 3 · 3� · 1,717� = 75,80 �
<X���Y# = 75,8 ��
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 82 de 114
Se tomará como válido el valor obtenido según el criterio de Tresca por ser más conservador que
la otra teoría de falla considerada. El valor del diámetro definitivo será:
<�Z� #q3# = 80 ��
1.8.4 Comprobación a fatiga
No procede realizar una comprobación a fatiga en este eje ya que se ha considerado que no está
sometido a esfuerzos fluctuantes que puedan inducir este tipo de daño al material.
1.9 SELECCIÓN DE RODAMIENTOS
En este capítulo se realizará una selección de los rodamientos a emplear tanto en los apoyos del eje
principal como los que se incluyen en la caja multiplicadora.
Se establecerán como criterios de diseño el tipo de carga, englobando magnitud y dirección, y el
espacio disponible, tanto radial como axialmente.
Para facilitar la comprensión de los cálculos y establecer un orden de redacción se seleccionarán los
rodamientos desde el rótor eólico hasta el generador, es decir, se comenzará por el rodamiento
principal del eje de baja velocidad para terminar por el rodamiento del eje de alta velocidad.
A continuación se detallarán las expresiones y cálculos respecto a determinación de cargas y cálculo
de vida de los rodamientos que se emplearán en las secciones posteriores.
1.9.1 Dimensionado y duración de servicio
En primer lugar, al dimensionar un rodamiento hay que distinguir si está solicitado estáticamente
o dinámicamente. Para cada rodamiento se comprobará el tipo de solicitación soportada y se
emplearán las expresiones de cálculo adecuadas.
Todos los rodamientos del tren de potencia se seleccionarán considerando velocidad de giro y
carga constante durante toda la vida de funcionamiento.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 83 de 114
1.9.1.1 Solicitación estática
Al actuar una carga estática se calcula el factor de esfuerzos estáticos fs para comprobar si el
rodamiento posee la suficiente capacidad estática:
�� = �g�g
Donde:
-C0 es la capacidad de carga estática, característica de cada rodamiento según catálogo.
Expresada en Kilo-Newtons.
-P0 es la carga estática equivalente, expresada en Kilo-Newtons.
Éste último factor es un valor ficticio que se calcula en caso de actuar una carga combinada.
Se obtiene mediante la siguiente expresión:
�g = �g · �� + �g · �#
Donde:
-X0 es el factor radial, característico para cada tipo de rodamiento.
-Y0 es el factor axial, característico para cada tipo de rodamiento.
-Fr es la carga radial, expresada en Kilo-Newtons.
-Fa es la carga axial, expresada en Kilo-Newtons.
1.9.1.2 Solicitación dinámica
Éste procedimiento está basado en la fatiga del material. La fórmula empleada para el cálculo
de la duración es:
( = F��Go
Donde:
-L es la duración nominal en millones de revoluciones que alcanza o que la rebasa por lo
menos el 90% de un lote de rodamientos iguales.
-C es la capacidad de carga dinámica, que se indica para cada rodamiento individualmente
en catálogo. Expresado en Kilo-Newtons.
-p es el exponente de la duración y es diferente para los rodamientos de bolas y de rodillos.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 84 de 114
h = 3 h;p; p�<;�u�mv�w <� |�j;w h = 103 h;p; p�<;�u�mv�w <� p�<ujj�w
-P es la carga dinámica equivalente, expresada en Kilo-Newtons.
Éste último factor es un valor ficticio que se calcula en caso de actuar una carga combinada.
Se obtiene mediante la siguiente expresión:
� = � · �� + � · �#
Donde:
-X es el factor radial, característico para cada tipo de rodamiento.
-Y es el factor axial, característico para cada tipo de rodamiento.
-Fr es la carga radial, expresada en Kilo-Newtons.
-Fa es la carga axial, expresada en Kilo-Newtons.
Para velocidad de giro constante, la duración puede expresarse en horas:
( = ( · 10�m · 60
Siendo:
-( la vida en horas del rodamiento.
- m la velocidad del rodamiento en rpm.
1.9.1.3 Cálculo del número de horas de servicio
La vida del aerogenerador se ha fijado desde un principio en 20 años, sin embargo, el
aerogenerador, y en concreto los rodamientos que se integran en el diseño del tren de
potencia no estarán en servicio ininterrumpidamente durante todo ese margen de tiempo.
Es necesario por lo tanto realizar una estimación del tiempo que el aerogenerador se
encontrará parado y descontarlo de la vida de diseño global. Las causas por las que el
aerogenerador pueda encontrarse parado pueden ser muy diferentes:
-Vientos altos. -Vientos insuficientes. -Error de funcionamiento. -Parada Manual por tareas de mantenimiento. -Parada de Emergencia.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 85 de 114
Teniendo en cuenta todas éstas posibles situaciones se estima un funcionamiento continuo del
80 % de la vida nominal del aerogenerador. La vida de funcionamiento en horas para los
rodamientos será de:
( = 0,8 · 20 ;ñ�w · 365 <í;w;ñ� · 24 ℎ�p;w<í; = 140.160 ℎ�p;w
Y al cabo de un año:
(A = 0,8 · 1 ;ñ� · 365 <í;w;ñ� · 24 ℎ�p;w<í; = 7.008 ℎ�p;w
1.9.2 Rodamiento principal del eje de baja
El rodamiento principal está situado en el eje de baja velocidad, próximo al acoplamiento con el
buje del rótor eólico. Como se determinó en (1.3) es el apoyo más solicitado del tren de potencia,
ya que soporta una elevada carga tanto axial como radial.
Se introdujo el espacio disponible como uno de los criterios condicionantes a la hora de la de
selección de rodamientos, sin embargo en éste caso no será considerado como un factor
limitante, pues en esta zona del tren el espacio es suficientemente diáfano.
La sección donde se aleja el rodamiento tiene un diámetro de 440 milímetros.
Es la carga soportada por lo tanto el factor determinante en este rodamiento, así, la carga axial
soportada es: �# = 223,75 "�
Y la carga radial es: �� = 999,55 KN
Debido a que éste rodamiento presenta una elevada solicitación a carga radial y una carga axial
relativamente moderada y unidireccional, se ha seleccionado un rodamiento de rodillos a rótula
23188 CA/W33.
La relación entre carga y duración para una vida útil de 20 años con 7.008 horas equivalentes al
año es:
( = 10�m · 60 · F��GAg >L

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 86 de 114
Así, despejando C/P: �� = F( · m · 6010� G> AgL = F7.008 · 22,16 · 6010� G> AgL = 1,95 (5. ¡. 5)
Ésta relación servirá para ambos rodamientos del eje de baja.
El modelo seleccionado presenta una velocidad límite de 850 rpm, muy por encima de la
velocidad nominal del eje de baja.
No se considerará la fuerza axial como carga estática, sino únicamente como carga dinámica.
El rodamiento escogido presenta, según catálogo, las siguientes características con las que se
procederá al cálculo tanto a carga estática como dinámica:
1.9.2.1 Carga estática
La carga estática máxima equivalente que puede soportar este rodamiento es de:
�g = 10.000 "�
Según las características del rodamiento y las cargas soportadas, la carga estática equivalente a
la que estará sometido será:
�g = 1 �g = 2,2
�g = �g · �� + �g · �# = 1 · 999,55 + 2,2 · 223,75 = 1.491,80 "�
�� = �g�g = 10.0001.491,80 = 6,70
Como se puede comprobar en la expresión anterior, el rodamiento posee la suficiente
capacidad estática para soportar las solicitaciones a las que está sometido.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 87 de 114
1.9.2.2 Carga dinámica
La carga dinámica equivalente máxima que es capaz de soportar éste rodamiento es de:
� = 6.000 "�
Según las características del rodamiento y las cargas soportadas, la carga dinámica equivalente
a la que estará sometido será:
� = 1 � = 2,3 h = 10/3
� = � · �� + � · �# = 1 · 999,55 + 2,3 · 223,75 = 1.514,17 "�
Según la ecuación (1.9.1) la carga estática equivalente de referencia que soporta será de:
� = 1,95 · � = 1,95 · 1.514,17 = 2.952,63 "�
Como:
� = 2.952,63 "� < 6.000 "�
El rodamiento soportará la solicitación dinámica.
1.9.2.3 Cálculo de la vida del rodamiento
La vida del rodamiento será de:
( = F��Go = F 6.0001.514,17GAg >L ≅ 98 �ujj�m�w <� p���ji�u�m�w
Que en horas corresponde a:
( = 98 · 10�p���ji�u�m�w22,16 p���ji�u�m�w�umiv� · 60 �umiv�wℎ�p; = 73.706,37 ℎ�p;w
Si el aerogenerador funciona 7.008 horas al año, la vida del rodamiento será de:
(#ñ�� = 73.706,37 ℎ�p;w7.008 ℎ�p;w;ñ� ≅ 10 ;ñ�w
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 88 de 114
1.9.3 Rodamiento del lado de la caja multiplicadora
Éste rodamiento se corresponde con el apoyo libre axialmente del eje de baja velocidad, por lo
tanto solo soporta carga radial, de valor: �� = 881,83 KN El rodamiento que se selecciona en este apartado se encuentra integrado como parte de la
carcasa de la caja multiplicadora, por lo que dicha carcasa ha sido diseñada en función de las
limitaciones constructivas que impone este apoyo. Por tanto, el espacio disponible tampoco será
un factor restrictivo en la selección de este rodamiento.
La sección donde se aloja este rodamiento tiene un diámetro de 400 milímetros.
Debido a que éste rodamiento presenta únicamente solicitación a carga radial, se ha escogido un
rodamiento de rodillos cilíndricos de una hilera NU 3080 MA6.
Tal y como se explicó en (1.9.2) se tomará como referencia el valor de la relación C/P calculada en
la ecuación (1.9.1).
El modelo seleccionado presenta una velocidad límite de 1.400 rpm, muy por encima de la
velocidad nominal del eje de baja.
El rodamiento escogido presenta, según catálogo, las siguientes características con las que se
procederá al cálculo tanto a carga estática como dinámica:
1.9.3.1 Carga estática
La carga estática máxima equivalente que puede soportar este rodamiento es de:
�g = 5.500 "�
Según las características del rodamiento y las cargas soportadas, la carga estática equivalente a
la que estará sometido será:
�g = 1
�g = �g · �� = 1 · 881,83 = 881,83 "�
�� = �g�g = 5.500881,83 = 6,23
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 89 de 114
Como se puede comprobar en la expresión anterior, el rodamiento posee la suficiente
capacidad estática para soportar las solicitaciones a las que está sometido.
1.9.3.2 Carga dinámica
La carga dinámica equivalente máxima que es capaz de soportar éste rodamiento es de:
� = 2.810 "�
Según las características del rodamiento y las cargas soportadas, la carga dinámica equivalente
a la que estará sometido será:
� = 1 h = 10/3
� = � · �� = 1 · 881,83 = 881,83 "�
Según la ecuación (1.9.1) la carga estática equivalente de referencia que soporta será de:
� = 1,95 · � = 1,95 · 881,83 = 1.719,56 "�
Como:
� = 1.719,56 "� < 2.810 "�
El rodamiento soportará la solicitación dinámica.
1.9.3.3 Cálculo de la vida del rodamiento
La vida del rodamiento será de:
( = F��Go = F 2.810881,83GAg >L ≅ 48 �ujj�m�w <� p���ji�u�m�w
Que en horas corresponde a:
( = 48 · 10�p���ji�u�m�w22,16 p���ji�u�m�w�umiv� · 60 �umiv�wℎ�p; = 36.101,08 ℎ�p;w
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 90 de 114
Si el aerogenerador funciona 7.008 horas al año, la vida del rodamiento será de:
(#ñ�� = 36.101,08 ℎ�p;w7.008 ℎ�p;w;ñ� ≅ 5 ;ñ�w
1.9.4 Rodamientos del eje de los satélites de la primera etapa
Para la selección de éstos rodamientos se considerará la carga total calculada en (1.5.1.2)
repartida uniformemente sobre los tres satélites del diseño. Éstos rodamientos soportan
únicamente carga radial de valor:
�� = �ztfx3 = 796,773 = 265,60 "�
Los rodamientos que se seleccionan en este apartado permiten el movimiento relativo entre el
brazo porta-satélites y la rueda satélite, se sitúa a la izquierda de la rueda satélite y actúa como
apoyo fijo del eje. Está integrado dentro del disco porta-satélites 1, por lo tanto se ha considerado
el espacio disponible como criterio fundamental de selección.
La sección donde se aloja este rodamiento tiene un diámetro de 160 milímetros.
Debido a que éste rodamiento presenta únicamente solicitación a carga radial, y posee
restricciones de espacio como se apuntó anteriormente, se ha escogido un rodamiento de rodillos
a rótula 24132 CC/W33.
Tal y como se explicó en (1.9.2) se tomará como referencia el valor de la relación C/P, que en el
caso de este rodamiento toma el siguiente valor: �� = F( · m · 6010� G> AgL = F7.008 · 38,25 · 6010� G> AgL = 2,30
El modelo seleccionado presenta una velocidad límite de 1.900 rpm, muy por encima de la
velocidad nominal del eje de baja.
El rodamiento escogido presenta, según catálogo, las siguientes características con las que se
procederá al cálculo tanto a carga estática como dinámica:

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 91 de 114
1.9.4.1 Carga estática
La carga estática máxima equivalente que puede soportar este rodamiento es de:
�g = 1.760 "�
Según las características del rodamiento y las cargas soportadas, la carga estática equivalente a
la que estará sometido será:
�g = 1 �g = 1,6
�g = �g · �� + �g · �# = 1 · 265,64 + 1,6 · 0 = 265,64 "�
�� = �g�g = 1.760265,64 = 6,62
Como se puede comprobar en la expresión anterior, el rodamiento posee la suficiente
capacidad estática para soportar las solicitaciones a las que está sometido.
2.10.4.2 Carga dinámica
La carga dinámica equivalente máxima que es capaz de soportar éste rodamiento es de:
� = 1.180 "�
Según las características del rodamiento y las cargas soportadas, la carga dinámica equivalente
a la que estará sometido será:
� = 1 � = 1,7 h = 10/3
� = � · �� + � · �# = 1 · 265,64 + 1,7 · 0 = 265,64 "�
Según la ecuación (1.9.1) la carga estática equivalente de referencia que soporta será de:
� = 2,30 · � = 2,30 · 265,64 = 610,97 "�
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 92 de 114
Como:
� = 612,35 "� < 1.180 "�
El rodamiento soportará la solicitación dinámica.
1.9.4.3 Cálculo de la vida del rodamiento
La vida del rodamiento será de:
( = F��Go = F 1.180265,64GAg >L ≅ 144 �ujj�m�w <� p���ji�u�m�w
Que en horas corresponde a:
( = 144 · 10�p���ji�u�m�w38,25 p���ji�u�m�w�umiv� · 60 �umiv�wℎ�p; = 62.745 ℎ�p;w
Si el aerogenerador funciona 7.008 horas al año, tendrá una vida estimada de:
(#ñ�� = 62.745 ℎ�p;w7.008 ℎ�p;w;ñ� ≅ 10 ;ñ�w
1.9.5 Rodamientos del eje de los satélites de la segunda etapa
Para la selección de éstos rodamientos se considerará la carga total calculada en (1.6.2) repartida
uniformemente sobre los tres satélites del diseño. Éstos rodamientos soportan únicamente carga
radial de valor:
�� = �ztfx3 = 98,223 = 32,74 "�
Los rodamientos que se seleccionan en este apartado permiten el movimiento relativo entre el
brazo porta-satélites y la rueda satélite, sirven de apoyo fijo al eje pota-satélites y se sitúan a la
izquierda de la rueda satélite.
La sección donde se alojan éstos rodamientos tiene un diámetro de 80 milímetros.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 93 de 114
Tal y como se explicó en (1.9.2) se tomará como referencia el valor de la relación C/P, que en este
caso toma el siguiente valor: �� = F( · m · 6010� G> AgL = F7.008 · 312,50 · 6010� G> AgL = 4,32
El modelo seleccionado presenta una velocidad límite de 4.300 rpm, muy por encima de la
velocidad nominal del eje de baja.
Se ha seleccionado un rodamiento de rodillos a rótula SKF 22316 E.
1.9.5.1 Carga estática
La carga estática máxima equivalente que puede soportar este rodamiento es de:
�g = 540 "�
Según las características del rodamiento y las cargas soportadas, la carga estática equivalente a
la que estará sometido será:
�g = 1 �g = 1,8
�g = �g · �� + �g · �# = 1 · 32,74 = 32,74 "�
�� = �g�g = 54032,74 = 16,49
Como se puede comprobar en la expresión anterior, el rodamiento posee la suficiente
capacidad estática para soportar las solicitaciones a las que está sometido.
1.9.5.2 Carga dinámica
La carga dinámica equivalente máxima que es capaz de soportar éste rodamiento es de:
� = 490 "�
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 94 de 114
Según las características del rodamiento y las cargas soportadas, la carga dinámica equivalente
a la que estará sometido será:
� = 1 � = 1,9 h = 10/3
� = � · �� + � · �# = 1 · 32,74 = 32,74 "�
La carga estática equivalente de referencia que soporta será de:
� = 4,32 · � = 4,32 · 32,74 = 141,43 "�
Como:
� = 141,43 "� < 490 "�
El rodamiento soportará la solicitación dinámica.
1.9.5.3 Cálculo de la vida del rodamiento
La vida del rodamiento será de:
( = F��Go = F 49032,74GAg >L ≅ 8.200 �ujj�m�w <� p���ji�u�m�w
Que en horas corresponde a:
( = 8.200 · 10�p���ji�u�m�w312,50 p���ji�u�m�w�umiv� · 60 �umiv�wℎ�p; = 437.300 ℎ�p;w
Si el aerogenerador funciona 7.008 horas al año, el rodamiento tendrá una vida esperada de:
(#ñ�� = 473.300 ℎ�p;w7.008 ℎ�p;w;ñ� > 20 ;ñ�w

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 95 de 114
1.9.6 Rodamiento de fijación axial
Para la fijación axial del eje intermedio se ha seleccionado un rodamiento axial de bolas de doble
efecto SKF 52228. Este elemento estará situado entre el eje intermedio y el eje de alta velocidad
acoplándose a ambos.
Ninguno de los elementos que componen la caja multiplicadora introduce cargas axiales sobre
este eje, sin embargo para el cálculo de la vida y la seguridad de éste rodamiento es necesario
estimar una carga de referencia con la que se llevarán a cabo las comprobaciones pertinentes.
Se ha estimado la carga axial soportada por éste elemento en un 5 % de la carga axial introducida
por el rótor eólico que se calculó en (1.3.1):
�# = 0,05 · 223.749,48 = 11.187,47 �
Éste rodamiento posee una velocidad límite de 2.000 rpm, superior a la velocidad de rotación del
eje de alta que será la que se emplee en los cálculos.
1.9.6.1 Carga estática
La carga estática máxima equivalente que puede soportar este rodamiento es de:
�g = 620 "�
Según las características del rodamiento y las cargas soportadas, la carga estática equivalente a
la que estará sometido será:
�g = 0,5 �g = 0,9
�g = �# = 11,18 "�
�� = �g�g = 62011,18 = 55,45
Como se puede comprobar en la expresión anterior, el rodamiento posee la suficiente
capacidad estática para soportar las solicitaciones a las que está sometido.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 96 de 114
1.9.6.2 Carga dinámica
La carga dinámica equivalente máxima que es capaz de soportar éste rodamiento es de:
� = 190 "�
La carga dinámica equivalente a la que estará sometido será:
� = �# = 11,18 "�
El valor de la carga dinámica equivalente es muy inferior al valor máximo por lo que se
concluye que el rodamiento soportará la solicitación dinámica.
1.9.6.3 Cálculo de la vida del rodamiento
Al ser un rodamiento de bolas el valor del exponente p para el cálculo de la vida del
rodamiento es diferente al empleado para el resto de rodamientos: h = 3
La vida del rodamiento será entonces de:
( = F��Go = F 19011,18G> ≅ 4.910 �ujj�m�w <� p���ji�u�m�w
Que en horas corresponde a:
( = 4.910 · 10�p���ji�u�m�w1.500 p���ji�u�m�w�umiv� · 60 �umiv�wℎ�p; = 54.555 ℎ�p;w
Si el aerogenerador funciona 7.008 horas al año, la vida estimada del rodamiento será de:
(#ñ�� = 54.555 ℎ�p;w7.008 ℎ�p;w;ñ� ≅ 7,5 ;ñ�w

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 97 de 114
1.9.7 Rodamiento del eje de alta velocidad
Éste rodamiento se encuentra alojado en la carcasa de la caja multiplicadora y actúa como apoyo
del eje de alta velocidad. Tal y como se explicó en el capítulo (1.8), éste rodamiento no se
encuentra sometido a cargas externas, por lo que será necesario realizar la misma estimación
sobre la carga axial aplicada en los cálculos de (1.9.6). �# = 0,05 · 223.749,48 = 11.187,47 �
La sección donde se alojan éstos rodamientos tiene un diámetro de 80 milímetros.
Se ha seleccionado un rodamiento de bolas con contacto angular SKF 7416 M.
El modelo seleccionado presenta una velocidad límite de 4.300 rpm, valor que se encuentra por
encima de la velocidad nominal del eje de baja.
El rodamiento escogido presenta, según catálogo, las siguientes características con las que se
procederá al cálculo tanto a carga estática como dinámica:
1.9.7.1 Carga estática
La carga estática máxima equivalente que puede soportar este rodamiento es de:
�g = 153 "�
Según las características del rodamiento y las cargas soportadas, la carga estática equivalente a
la que estará sometido será:
�g = 0,5 �g = 0,28
�g = �g · �� + �g · �# = 0,5 · 0,00 + 0,28 · 11,18 = 3,13 "�
�� = �g�g = 1533,13 = 48,88
Como se puede comprobar en la expresión anterior, el rodamiento posee la suficiente
capacidad estática para soportar las solicitaciones a las que está sometido.
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 98 de 114
1.9.7.2 Carga dinámica
La carga dinámica equivalente máxima que es capaz de soportar éste rodamiento es de:
� = 178 "�
Según las características del rodamiento y las cargas soportadas, la carga dinámica equivalente
a la que estará sometido será:
� = 0,36 � = 0,62 h = 3
La carga dinámica equivalente a la que estará sometido será:
� = � · �� + � · �# = 0,62 · 11,18 = 6,93 "�
El valor de la carga dinámica equivalente es muy inferior al valor máximo por lo que se
concluye que el rodamiento soportará la solicitación dinámica.
1.9.7.3 Cálculo de la vida del rodamiento
La vida del rodamiento será de:
( = F��Go = F1786,93G> ≅ 16.900 �ujj�m�w <� p���ji�u�m�w
Que en horas corresponde a:
( = 16.900 · 10�p���ji�u�m�w1.500 p���ji�u�m�w�umiv� · 60 �umiv�wℎ�p; = 187.777,77 ℎ�p;w
Si el aerogenerador funciona 7.008 horas al año, el rodamiento tendrá una vida de:
(#ñ�� = 187.777,77 ℎ�p;w7.008 ℎ�p;w;ñ� ≅ 20 ;ñ�w
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 99 de 114
1.10 DIMENSIONADO DISCO DE FRENO
En este capítulo se determinarán las dimensiones del disco de freno acoplado en el eje de alta
velocidad. Este freno entra en funcionamiento cuando la velocidad del viento es superior a un límite
determinado por encima del cual las cargas inducidas pueden ser perjudiciales para el tren de
potencia.
Bajo estas condiciones, los sistemas de seguridad integrados en el rótor disminuyen su exposición a
la corriente eólica reduciendo las solicitaciones de manera que el freno mecánico cumple la única
función de fijar los elementos del tren de potencia con el objetivo de mantener el rótor eólico
inmóvil.
El par de cálculo que se empleará por lo tanto, tendrá un valor inferior al nominal, pero
suficientemente conservador como para contemplar los efectos de inercia del resto del tren de
potencia. En consecuencia con lo expuesto anteriormente, el par nominal de frenado ha sido
estimado en un 70 % del par torsor soportado por el eje de alta velocidad en condiciones de
funcionamiento normal. Así pues, según cálculos de (1.8.1):
� �+� #q = 0,7 · 8.185,11 = 5.729,57 � · �
1.10.1 Modelo de desgaste uniforme
Para la determinación del diámetro del disco de freno se supondrá que ocurrirá un desgaste
uniforme sobre las superficies de rozamiento. Considerando las pastillas del freno como sectores
circulares, se puede definir un radio interior ri y un radio exterior ro, estando aplicada la fuerza P
en dirección axial sobre el centro de dicha pastilla como se muestra en la siguiente figura:
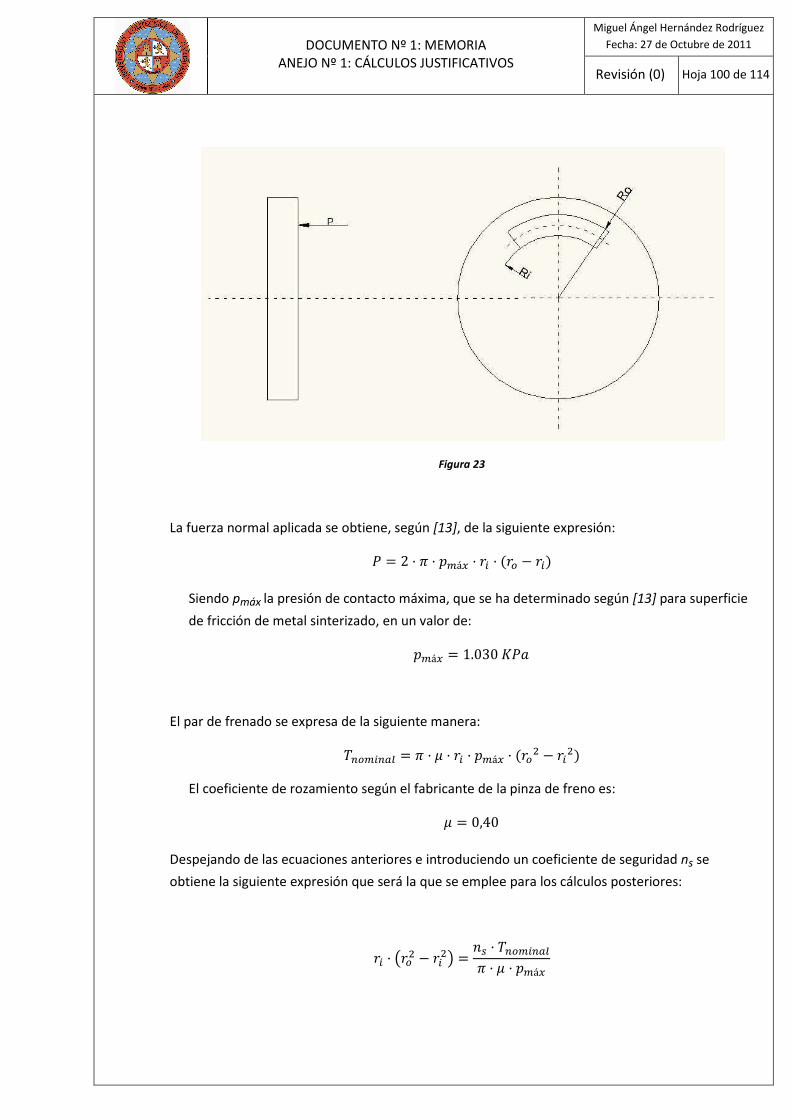
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 100 de 114
Figura 23
La fuerza normal aplicada se obtiene, según [13], de la siguiente expresión: � = 2 · � · h+á$ · p� · (p� − p�)
Siendo pmáx la presión de contacto máxima, que se ha determinado según [13] para superficie
de fricción de metal sinterizado, en un valor de: h+á$ = 1.030 "�;
El par de frenado se expresa de la siguiente manera: � �+� #q = � · ¢ · p� · h+á$ · (p�= − p�=)
El coeficiente de rozamiento según el fabricante de la pinza de freno es: ¢ = 0,40
Despejando de las ecuaciones anteriores e introduciendo un coeficiente de seguridad ns se
obtiene la siguiente expresión que será la que se emplee para los cálculos posteriores:
p� · Pp�= − p�=Q = m� · � �+� #q� · ¢ · h+á$

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 101 de 114
Fijando el valor de este coeficiente de seguridad en 2 y con los datos disponibles se puede calcular
el valor de este miembro:
p� · Pp�= − p�=Q = 2 · 5.729,57� · 0,40 · 1.030 · 10> = 88,53 · 10f�
De las expresiones anteriores se puede despejar el radio exterior de la siguiente manera:
p� = C88,53 · 10f�p� + p�=
El radio exterior mínimo se obtiene tomando la derivada del radio exterior con respecto al radio
interior e igualando a cero: <p�<p� = 0,5O88,53 · 10f�p� + p�= · I− 88,53 · 10f�p�= + 2 · p�J = 0
p� = 164,19 ��
Y sustituyendo en la expresión anterior se obtiene el radio exterior del disco de freno:
p� = C88,53 · 10f�p� + p�= = C 88,53 · 10f�164,19 · 10f> + (164,19 · 10f>)=
p� = 284,39 ��
La fuerza máxima a aplicar en el freno en dirección axial es, según las ecuaciones anteriores:
� = 2 · m� · � �+� #q¢ · (p� + p�) = 2 · 2 · 5.729,570,40 · (284,39 + 164,19) · 10f> = 127.724,82 �
La fuerza de frenado corresponde con la fuerza de rozamiento que provoca el par de frenado,
ésta fuerza será: �'�� � = ¢ · � = 0,40 · 127.724,82 = 51.089,92 �
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 102 de 114
Por lo tanto, el par máximo de frenado que aportará el freno será de:
�'�� � +á$ = �'�� � · (p� + p�)2 = 51.089,92 · (164,19 + 284,39) · 10f>2 ≅ 11.500 � · �
Habiendo determinado todos los parámetros necesarios para definir las características del freno,
se procederá a continuación a la selección de un freno comercial.
1.10.2 Selección del disco de freno/acoplamiento eje de alta
Se ha seleccionado un acoplamiento especial entre el eje de alta velocidad de la multiplicadora y
el eje del generador eléctrico. Éste acoplamiento incluye un disco de freno sobre el que se
montará la pinza que se ha seleccionado de un fabricante diferente.
Los parámetros necesarios para la selección del disco son los siguientes:
-Diámetro del eje de alta velocidad en la sección del acoplamiento. Se calculó en (1.8): <�Z� #q3# = 80 ��
-Diámetro del eje del generador en la sección del acoplamiento. Según planos constructivos
de dimensiones del generador escogido: <�Z� £� ��#��� = 120 ��
-Par nominal. Expuesto en (1.10): � �+� #q = 0,7 · 8.185,11 = 5.729,57 � · �
-Par de frenado máximo. Calculado en (1.10.1): �'�� � +á$ = 11.500 � · �
-Diámetro del disco: < = 2 · p� = 2 · 284,40 = 570 ��
-Espesor del disco: � = 30 ��
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 103 de 114
Con estos datos se ha seleccionado un acoplamiento SXFD-228-6,DBSE= 187mm, Disco Ø570x30,
1.500.
1.10.3 Selección de la pinza de freno
La pinza de freno es el elemento encargado de ejercer la fuerza axial que provoca el par de
frenado que detiene el tren de potencia. A continuación se muestran los parámetros a partir de
los cuales se ha realizado la selección de este elemento:
-Espesor del disco: � = 30 ��
-Diámetro del disco: < = 570 ��
-Radio efectivo de frenado. Calculado según indicaciones del fabricante:
�� = p� − 54 = 285 − 54 = 231 ��
-Fuerza axial de frenado. Calculada en (1.10.1):
�'�� � = 51 "�
Con estos datos se ha seleccionado un freno comercial Twiflex VCS72L con las siguientes características:
-Diámetro mínimo de disco: <+� = 500 ��
-Fuerza axial de frenado: �'�� � = 62 "�
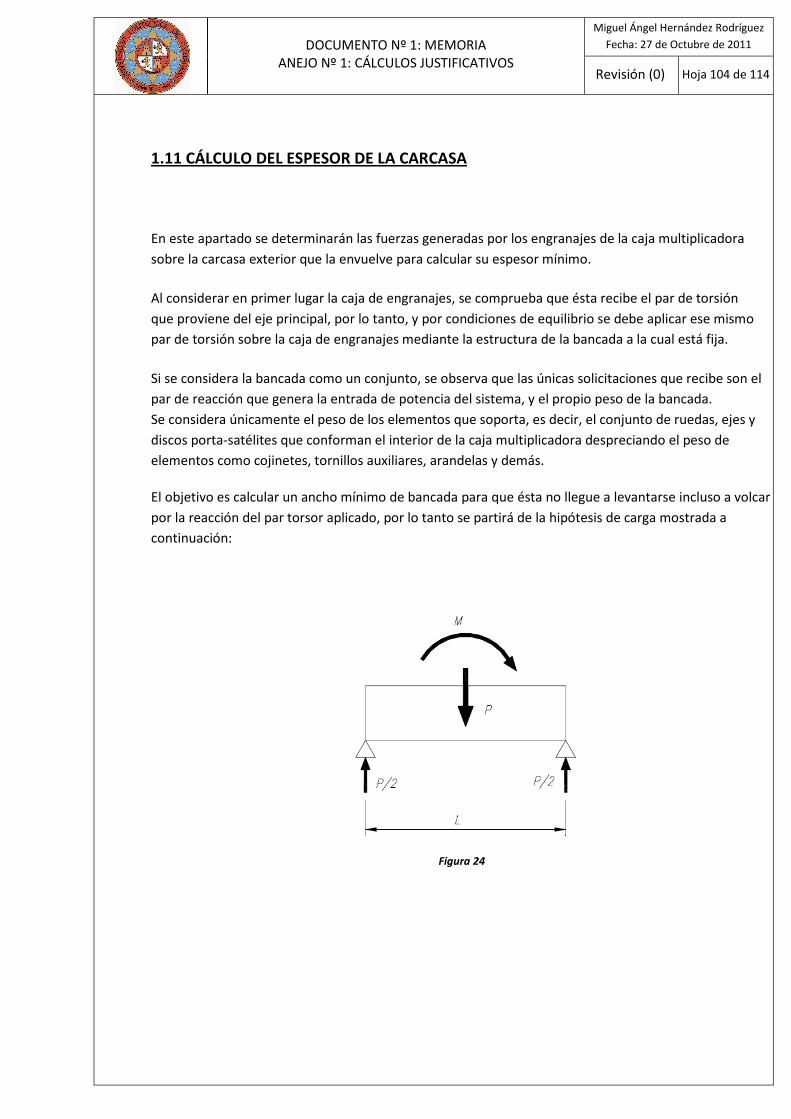
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 104 de 114
1.11 CÁLCULO DEL ESPESOR DE LA CARCASA
En este apartado se determinarán las fuerzas generadas por los engranajes de la caja multiplicadora
sobre la carcasa exterior que la envuelve para calcular su espesor mínimo.
Al considerar en primer lugar la caja de engranajes, se comprueba que ésta recibe el par de torsión
que proviene del eje principal, por lo tanto, y por condiciones de equilibrio se debe aplicar ese mismo
par de torsión sobre la caja de engranajes mediante la estructura de la bancada a la cual está fija.
Si se considera la bancada como un conjunto, se observa que las únicas solicitaciones que recibe son el
par de reacción que genera la entrada de potencia del sistema, y el propio peso de la bancada.
Se considera únicamente el peso de los elementos que soporta, es decir, el conjunto de ruedas, ejes y
discos porta-satélites que conforman el interior de la caja multiplicadora despreciando el peso de
elementos como cojinetes, tornillos auxiliares, arandelas y demás.
El objetivo es calcular un ancho mínimo de bancada para que ésta no llegue a levantarse incluso a volcar
por la reacción del par torsor aplicado, por lo tanto se partirá de la hipótesis de carga mostrada a
continuación:
Figura 24
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 105 de 114
Donde:
-M es el par torsor aplicado sobre la caja multiplicadora a través del eje de baja, que fue calculado
en (1.3.1): & = 584,653 "� · �
-P es el peso de la bancada.
1.11.1 Cálculo de las cargas sobre la carcasa
El momento flexionante M fue calculado en capítulos anteriores, sin embargo, para conocer la
carga puntual P aplicada es necesario establecer la masa de todos los elementos de las etapas
multiplicadoras. En los siguientes subapartados se realizará un cálculo estimativo de las masas de
los elementos teniendo en cuenta que:
-Todos los ejes y los dos discos porta-satélites están fabricados en acero AISI 4340, que posee
una densidad de: ¤ = 7,840 �/��>
-Todas las ruedas de la caja multiplicadora están fabricadas en acero AISI 4320, que posee una
densidad de: ¤ = 7,865 �/��>
1.11.1.1 Primera etapa
La primera etapa está compuesta por 3 ruedas satélites, 3 ejes porta-satélites, 1 disco porta-
satélites, 1 rueda planetaria y 1 corona. A continuación se determinarán las masas de todos
estos elementos mediante el cálculo de su volumen.
1.11.1.1.1 Rueda satélite
1�#3 A = �4 · (57= − 16=) · 41 = 96.378 ��>
��#3 A = 96.378 · 7,865 = 758.013 �p ≅ 758 d�
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 106 de 114
1.11.1.1.2 Rueda planetaria
1oq# A = �4 · (41= − 14=) · 41 = 47.819 ��>
�oq# A = 47.819 · 7,865 = 376.100 �p ≅ 376 d�
1.11.1.1.3 Corona
La forma exterior de la corona posee una geometría octogonal, por lo que el cálculo del
volumen se realizará de la siguiente manera:
��Y3ó£� � A = 70 · 8 = 560 ��
;�Y3ó£� � A = 1702 = 85 ��
��Y3ó£� � = ��Y3ó£� � A · ;�Y3ó£� � A = 47.600 ��=
1Y�� A = 41 · D47.600 − �4 · 154=E ≅ 1.188.000 ��>
�Y�� A = 1.188.000 · 7,865 ≅ 9.344.000 �p ≅ 9.400 d�
1.11.1.1.4 Eje porta-satélites
1� o��3 A = �4 · 16= · 66 ≅ 13.270 ��>
�� o��3 A = 13.270 · 7,84 = 104.036 �p ≅ 104 d�
1.11.1.1.5 Disco porta-satélites
1� o��3 A = �4 · (135= − 3 · 27=) · 17 ≅ 214.000 ��>
�� o��3 A = 214.000 · 7,84 ≅ 1.678.000 �p ≅ 1.680 d�
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 107 de 114
1.11.1.2 Eje intermedio
1� � 3 = �4 · 14= · 60 ≅ 9.236 ��>
�� � 3 = 9.236 · 7,84 ≅ 72.410 �p ≅ 72,5 d�
1.11.1.3 Segunda etapa
La segunda etapa está compuesta por los mismos elementos que la primera, por lo que los
cálculos de masa se realizarán mediante la misma metodología.
1.11.1.3.1 Rueda satélite
1�#3 = = �4 · (56= − 8=) · 9 ≅ 21.715 ��>
��#3 = = 21.715 · 7,865 ≅ 171.000 �p ≅ 171 d�
1.11.1.3.2 Rueda planetaria
1oq# = = �4 · (40= − 8=) · 9 ≅ 10.857 ��>
�oq# = = 10.857 · 7,865 ≅ 85.000 �p ≅ 85 d�
1.11.1.3.3 Corona
��Y3ó£� � = = 70 · 8 = 560 ��
;�Y3ó£� � = = 1702 = 85 ��
��Y3ó£� � = ��Y3ó£� � = · ;�Y3ó£� � = = 47.600 ��=
1Y�� = = 9 · D47.600 − �4 · 152=E ≅ 265.087 ��>
�Y�� = = 265.087 · 7,865 ≅ 2.085.000 �p = 2.085 d�
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 108 de 114
1.11.1.3.4 Eje porta-satélites
1� o��3 = = �4 · 8= · 25 ≅ 1.257 ��>
�� o��3 = = 1.257 · 7,84 ≅ 9.855.000 �p ≅ 10 d�
1.11.1.3.5 Disco porta-satélites
1� o��3 = = �4 · (121= − 3 · 17=) · 7,2 ≅ 78.000 ��>
�� o��3 = = 78.000 · 7,84 ≅ 611.500 �p = 612 d�
La masa total del conjunto será por lo tanto la suma de todas las masas unitarias expuestas
anteriormente teniendo en cuenta que hay tres satélites y tres ejes porta-satélites por etapa:
�3 ≅ 17.500 d�
La carga puntual será por lo tanto:
� = �3 · � = 17.500 · 9,81 ≅ 172 "�
1.11.2 Cálculo del espesor de la chapa
Para el cálculo del espesor de la chapa se determinará la deflexión de la viga y se comparará con
la deflexión admisible recomendado según [16] para deflexiones máximas en vigas sometidas a
vibración.
En primer lugar se determinará la deflexión resultante del momento aplicado, posteriormente se
calculará la deflexión provocada por la carga puntual y se superpondrán ambas deformaciones
para hallar el desplazamiento global.

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 109 de 114
- Flecha provocada por el momento flector:
Al localizarse la carga en el centro de la viga la deflexión es simétrica a ambos lados del punto de
aplicación. La ecuación de la deformada se calcula según [3] de la siguiente manera:
¥T = − &6 · ¦ · � · §I6 · (/2 − 3 · ((/2)=( − 2 · (J · ¨ − ¨>( ©
Donde: & = 584,653 "� · � ¦ = 100 ª�; ( = 1,7 �
� = ( · |>12 = 1,7 · |>12 = 0,142 · |>
La flecha máxima se calcula derivando esta expresión con respecto a la coordenada x e igualando
a 0: <¥<¨ = − &6 · ¦ · � · §F14 · (G − 3 · ¨=( © = 0
Donde:
F14 · (G − 3 · ¨=( = 0
¨ = C(=12 = C1,7=12 = 0,490 �
Según lo calculado, a una distancia x = 0,490 m se encuentra la deflexión máxima, luego
sustituyendo en la ecuación de la deformada:
¥T +á$ = − 6,862 · 10f�|> · §F14 · 1,7G · 0,490 − 0,490>1,7 ©
¥T +á$ = − 9,541 · 10f�|>

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 110 de 114
-Flecha provocada por la carga puntual:
La deflexión máxima se localiza en este caso en el mismo punto de aplicación de la carga. Se
calcula según [3] de la siguiente manera:
¥t +á$ = − � · (48 · ¦ · � = − 172 · 1,748 · 100 · 10� · 0,142 · |> = − 4,300 · 10f�|>
La deflexión máxima total será la resultante de la suma de ambas flechas máximas, así:
¥X +á$ = ¥T +á$ + ¥t +á$ = − 9,541 · 10f�|> − 4,300 · 10f�|> = − 1,384 · 10f�|>
Según [16] la deflexión admisible para vigas sometidas a vibración es de:
¥#�+ = (800 = 1,7800 = 2,125 · 10f>�
Igualando las dos últimas expresiones se determina el espesor mínimo de la carcasa para asegurar
las condiciones de deflexión admisible:
¥X +á$ = ¥#�+
2,125 · 10f> = 1,384 · 10f�|>
| = C1,384 · 10f�2,125 · 10f>� = 0,086 � = 86 ��
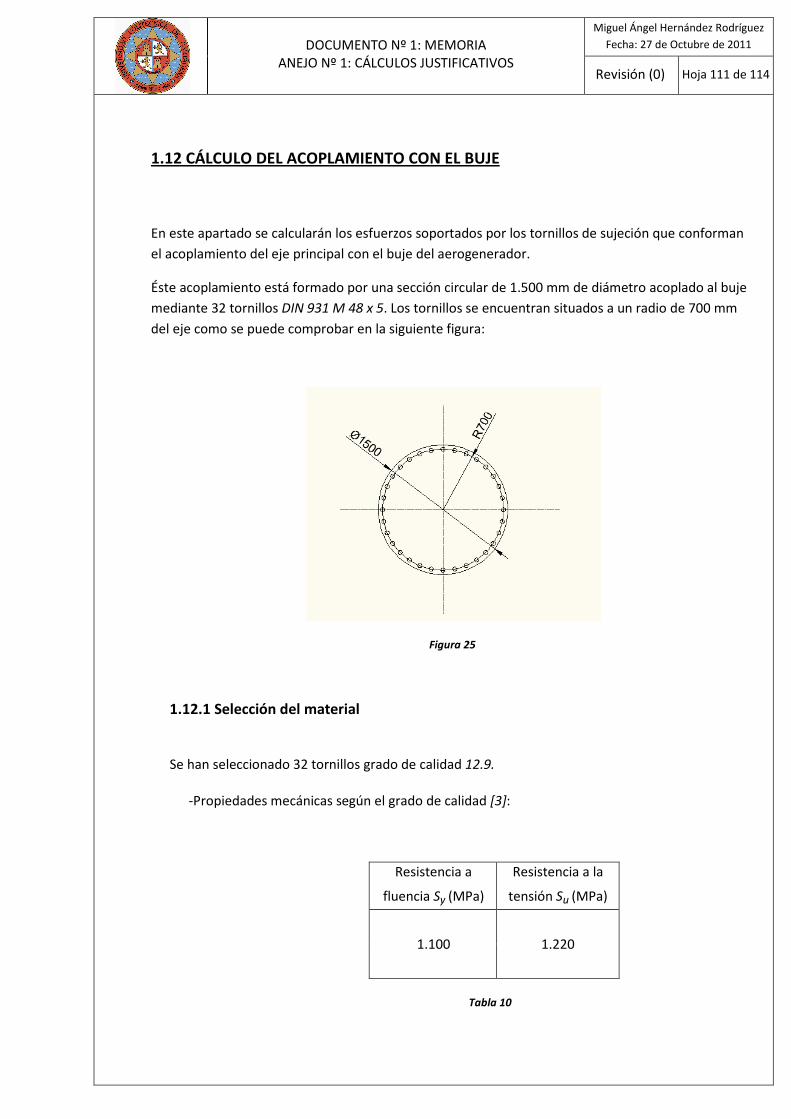
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 111 de 114
1.12 CÁLCULO DEL ACOPLAMIENTO CON EL BUJE
En este apartado se calcularán los esfuerzos soportados por los tornillos de sujeción que conforman
el acoplamiento del eje principal con el buje del aerogenerador.
Éste acoplamiento está formado por una sección circular de 1.500 mm de diámetro acoplado al buje
mediante 32 tornillos DIN 931 M 48 x 5. Los tornillos se encuentran situados a un radio de 700 mm
del eje como se puede comprobar en la siguiente figura:
Figura 25
1.12.1 Selección del material
Se han seleccionado 32 tornillos grado de calidad 12.9.
-Propiedades mecánicas según el grado de calidad [3]:
Resistencia a
fluencia Sy (MPa)
Resistencia a la
tensión Su (MPa)
1.100 1.220
Tabla 10
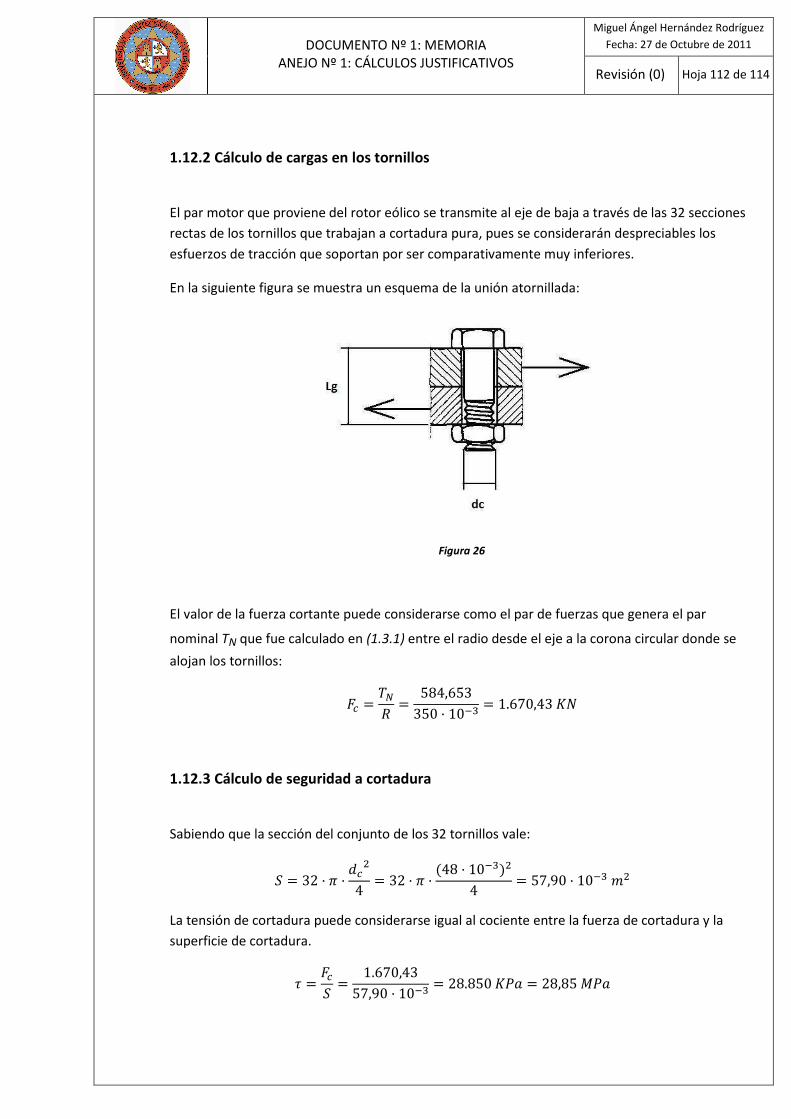
DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 112 de 114
1.12.2 Cálculo de cargas en los tornillos
El par motor que proviene del rotor eólico se transmite al eje de baja a través de las 32 secciones
rectas de los tornillos que trabajan a cortadura pura, pues se considerarán despreciables los
esfuerzos de tracción que soportan por ser comparativamente muy inferiores.
En la siguiente figura se muestra un esquema de la unión atornillada:
Figura 26
El valor de la fuerza cortante puede considerarse como el par de fuerzas que genera el par
nominal TN que fue calculado en (1.3.1) entre el radio desde el eje a la corona circular donde se
alojan los tornillos:
�Y = ��� = 584,653350 · 10f> = 1.670,43 "�
1.12.3 Cálculo de seguridad a cortadura
Sabiendo que la sección del conjunto de los 32 tornillos vale:
- = 32 · � · <Y=4 = 32 · � · (48 · 10f>)=4 = 57,90 · 10f> �=
La tensión de cortadura puede considerarse igual al cociente entre la fuerza de cortadura y la
superficie de cortadura.
@ = �Y- = 1.670,4357,90 · 10f> = 28.850 "�; = 28,85 &�;

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 113 de 114
La falla por esfuerzo cortante, según [13], ocurrirá si: @ > -$. = 0,40 · -. -$. = 0,40 · 1.100 = 440 &�;
Se comprueba que el valor del esfuerzo cortante es inferior al esfuerzo admisible, por lo tanto la
unión soporta las solicitaciones, el factor de seguridad será de:
�� = -$.@ = 44028,85 = 15,25
1.12.4 Cálculo de seguridad a flexión
Es preciso también una comprobación a flexión para asegurar que los tornillos no rompen por
estar sometidos a este tipo de carga. Para evitar esta falla se debe cumplir lo siguiente:
, = �Y · (£32 · 2 · n+ < 0,60 · -.
Donde:
- Lg es la longitud de agarre, véase la figura 28. (£ = 0,20 �
- Zm es el módulo de la sección del tornillo, su valor es:
n+ = �� = � · <Y�/64<Y/2 = � · (48 · 10f>)�/6448 · 10f>/2 = 1,08 · 10f� �>
Por lo tanto el esfuerzo de flexión será de:
, = 1.670,45 · 0,232 · 2 · 1,08 · 10f� = 483.347 "�; = 483,35 &�;
Como: 0,60 · 1.100 = 660 &�;

DOCUMENTO Nº 1: MEMORIA
ANEJO Nº 1: CÁLCULOS JUSTIFICATIVOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 114 de 114
El factor de seguridad a flexión es de:
�� = 0,60 · -., = 660483,35 = 1,36
La unión atornillada soportará ambas solicitaciones como se puede comprobar en los cálculos
anteriores.
El ingeniero Técnico Industrial:
Miguel Ángel Hernández Rodríguez
Cartagena, 27 de Octubre de 2011
UNIVERSIDAD POLITÉCNICA DE CARTAGENA
E.T.S.I.I
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA
Diseño del conjunto eje-acoplamiento-reductora epicicloidal
Documento Nº3. Pliego de Condiciones
Peticionario: Departo. de Ingeniería Mecánica Universidad Politécnica de Cartagena. Nombre: Miguel Ángel Hernández Rodríguez Lugar: Cartagena Fecha: 27 Octubre de 2011
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja de 0 de 15
ÍNDICE
1.1 CONDICIONES FACULTATIVAS Y LEGALES .................................................. 1
1.1.1 Contrato ..................................................................................................................................... 1
1.1.2 Subcontratista ............................................................................................................................ 1
1.1.3 Régimen de intervención ........................................................................................................... 1
1.1.4 Propiedad Industrial y Comercial ............................................................................................... 1
1.1.5 Artículos ..................................................................................................................................... 1
1.2 Pliego de Condiciones General. ................................................................. 4
1.2.1 Descripción General del Proyecto.............................................................................................. 4
1.2.2 Sobre Materiales ........................................................................................................................ 6
1.2.3 Sobre Ensayos ............................................................................................................................ 7
1.2.4 Sobre Pruebas ............................................................................................................................ 8
1.3. Pliego de Condiciones Económicas ........................................................... 9
1.4 Pliego de Condiciones Particulares y Técnicas ......................................... 12
1.5 Pliego de Condiciones de Seguridad e Higiene ......................................... 15
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 1 de 15
1.1 CONDICIONES FACULTATIVAS Y LEGALES
1.1.1 Contrato
A efectos de ejecución de las obras, se considerará como fecha de comienzo de las mismas la que
se especifiquen en el pliego particular de condiciones , y en su defecto la de la orden de comienzo
de los trabajos. Ésta orden se comunicara al contratista en un plazo superior a 90 días a partir de
la fecha del contrato.
El contrato será firmado por parte del contratista, por su representante legal o apoderado, quien
deberá poder probar esta extremo con la correspondiente acreditación.
1.1.2 Subcontratista
El contratista podrá subcontratar cualquier parte de la obra, previa autorización del Ingeniero
Técnico, para lo cual deberá informa con anterioridad a esta, del alcance y condiciones técnico-
económicas del subcontrato.
1.1.3 Régimen de intervención
Cuando el contratista, sea a las obligaciones o disposiciones del contrato, sea a las ordenes del
Ingeniero técnico, este la requerirá a cumplir este requisito de órdenes en un plazo determinado,
que salvo en condiciones de urgencia, no será nunca menor de 10 días de la modificación de
requerimiento.
1.1.4 Propiedad Industrial y Comercial
Al suscribir el contrato, el contratista garantiza al Ingeniero Técnico contra toda clase de
reivindicaciones que se refieran a suministro y materiales, procedimientos y medios utilizados
para la ejecución de la prensa y que proceda de titulares de patentes, licencias, planos, modelos,
marcas de fábrica o comercio.
En el caso de que fuera necesario, corresponde al contrato la obtención de las licencias o
permisos precisos, y soportar la carga de los derechos e identificación correspondientes.
En el caso de acciones dirigidas contra el Ingeniero Técnico por terceros, titulares de licencias,
autorizaciones, planos, modelos, marcas de fábrica o de comercio utilizadas por el contratista
para la ejecución de los trabajos, el contratista responderá ante el Ingeniero técnico del resultado
de dichas acciones, estando obligado además a prestarle su ayuda en el ejercicio de las
excepciones que competan al Ingeniero Técnico.
1.1.5 Artículos
Artículo 1:
El Pliego de condiciones se refiere al contrato del proyecto de diseño del conjunto eje-
acoplamiento-reductora epicicloidal de un aerogenerador eólico de 900 KW de potencia.
Artículo 2:
El mecanismo se ajustará en todo, a los planos y memorias que contiene dicho proyecto.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 2 de 15
Artículo 3:
El Ingeniero Técnico es responsable de todos los defectos, accidentes y consecuencias que
acontecieran con motivo del cálculo erróneo de alguno de los componentes del sistema.
Artículo 4:
El Ingeniero Técnico se reserva el derecho de realizar modificaciones, pruebas, ensayos e
inspecciones que crea oportunas durante la fabricación y montaje de las piezas del sistema.
Artículo 5:
La empresa contratista deberá atender cuantas órdenes verbales o escritas le sean dirigidas
por el Ingeniero Técnico, encaminadas a una mejora de la fabricación.
Artículo 6:
A tal fin existirá en el taller de la empresa contratista, y disponible en cualquier momento por
el director técnico, un libro de ordenes en que dicho técnico dará capacidad exacta a las
órdenes verbales.
Artículo 7:
A dicho libro sólo tendrá acceso el Ingeniero Técnico y el maestro de taller.
Artículo 8:
La empresa contratista de la propuesta técnica tiene la obligación de realizar esmeradamente
cada una de las piezas del sistema proyectado, y en caso de duda acudirá al consejo y consulta
del Ingeniero Técnico.
Artículo 9:
Si a juicio del ingeniero Técnico existiesen piezas mal ejecutadas, tendrá éste el derecho de
rechazarlas y la empresa contratista, tendrá el deber de realizarlas cuantas veces fuera
necesario hasta ser merecedora de aprobación. Por esta causa la empresa contratista no
tendrá derecho a compensación alguna ni a un aumento del costo sobre lo inicialmente
proyectado.
Artículo 10:
Formalización del proyecto de variación y aprobación por la entidad propietaria, de cuya
cuenta corre la modificación, se dará conocimiento de él al contratista, entendiéndose que no
se le admitirán otras reclamaciones que las que puedan referirse a la fijación de precios, no
previstos en el presupuesto que sirva de base a la contrata o la relativas a las diferencias de
coste por variación de la sexta parte en más o menos, comparativamente con el importe de
dicha contrata.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 3 de 15
Artículo 11:
El contratista no podrá hacer por sí mismo, alteraciones en ninguna de las partes del proyecto
aprobado, sin autorización escrita del Ingeniero Técnico, sin cuyo requisito no se abonarán los
aumentos que pudiesen que pudiesen resultar a consecuencia de las modificaciones no
autorizadas.
Artículo 12:
Se supone que el contratista ha realizado un minúsculo estudio de los documentos que
componen el presente proyecto, y por tanto acepta implícitamente las condiciones del
presente pliego de condiciones, así como los posibles errores que se hayan producido.
Artículo 13:
Tras la realización de la propuesta técnica, el contratista no tendrá derecho por el mayor
precio que pudiera costar, ni por erradas maniobras de fabricación que pudieran haber
ocurrido durante la misma.
Artículo 14:
La empresa contratista será responsable ante los tribunales de justicia de los accidentes o
daños que se derivan del elemento mecánico.
Artículo 15:
El taller contratista se compromete a entregar el mecanismo en el plazo proyectado, haciendo
frente a los gastos y consecuencias originadas en el retraso de la entrega.
Artículo 16:
La empresa contratista se obliga a tener al día la oportuna póliza de seguros con caja nacional
de accidentes.
Artículo 17:
Los materiales serán adquiridos por la empresa contratista en un perfecto estado de
suministro y conservación, comprobando la calidad y características de los mismos al realizar la
recepción de estos.

DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 4 de 15
1.2 PLIEGO DE CONDICIONES GENERAL.
1.2.1 Descripción General del Proyecto
1.2.1.1 Descripción
El proyecto consiste en el diseño y cálculo de todos los elementos que componen el conjunto
eje de baja-reductora epicicloidal-eje de alta.
Los materiales de las piezas diseñadas y los distintos elementos normalizados deben de ser
exactamente los indicados en la memoria de cálculo sino se cumpliera se llevarían a cabo las
sanciones económicas que más adelante se indicarán.
Las dimensiones y el montaje el cual se detalla en la memoria descriptiva debe de ser cumplido
sin excepción.
Dicha plataforma cuenta con la documentación acreditativa de adecuación al Real Decreto
1.215 de maquinaria el no cumplimiento de alguno de los apartados anteriores ocasionaría la
pérdida de dicha acreditación por parte de la propiedad.
El incorrecto mantenimiento de los elementos que conforman el conjunto del tren de potencia
puede ser otro aspecto de retirada de dicha acreditación ya que pueden haber variación en la
estructura de la mencionada maquinaria.
A la entrega de maquina el constructor debe de entregar la documentación para el montaje,
instalación y mantenimiento de lo siguiente:
- Planos mecánicos del proyecto.
- Toda información técnica que sea requerida por el contratante.
1.2.1.2Normas
En este apartado se mostrarán copia de las Normas, Reglamentos y leyes de carácter general
que sean de aplicación en la ejecución del proyecto.
1.2.1.2.1 Dibujo
- UNE 1032 Principios generales de representación.
- UNE 1166-1 Documentación técnica de productos vocabulario. Parte1: términos relativos
a los dibujos técnicos generalidades y tipo de dibujo.
- UNE-En ISO 6433 Referencia en los elementos.
- UNE 1135 Lista de elementos.
- UNE 1039 Acotación, principios generales, definiciones, métodos.
- UNE- EN ISO 6410-1 Roscas y piezas roscadas. Parte 1. Convenios generales
- UNE-EN ISO 6410-2 Roscas y piezas roscadas. Parte 2: Insertos roscados.
- UNE-EN ISO 6410-3 Roscas y piezas roscadas. Parte 3: Representación simplificada.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 5 de 15
- UNE 1037 Indicaciones de los estados superficiales en los dibujos.
1.2.1.2.2 Tolerancia, ajustes y mecanizado
- DIN 7154 Ajustes ISO para agujero único.
- DIN 7155 Ajuste ISO para eje único.
- DIN 7157 Ajuste para eje único.
- DIN 7168 Tolerancias libres de magnitudes lineales.
- UNE 1037-75 ISO 1032 Signos de mecanizado.
1.2.1.2.3 Tornillería, roscas y elementos de sujeción
- DIN 13 rosca métrica ISO.
- DIN 267 Condiciones técnicas de suministro de tornillería y tuercas.
1.2.1.2.4 Materiales
- EN 25-72.
- UNE 36-080-73 Aceros de cementación.
- UNE 36-080-85.
- EN 10083-1 Aceros para temple y revenido.
1.2.1.2.5 Seguridad
- Directiva 89/392/CEE relativa a la aproximación de las legislaciones de los estados
miembros modificada por la directiva 91/368/CEE y por la 93/44/CEE.
- R.D. 1435/1992 de 27 de noviembre por el que se traspone al derecho Español la directiva
89/392/CEE.
- R.D. 56/95 de 20/01/95 que modifica el R.D. 1435/92 de 27/11/92 sobre aplicación de las
legislaciones de los estados miembros sobre máquinas.
- Directiva 98/37/CEE del parlamento europeo y del consejo de 2 de Junio de 1998 relativa
a la aproximación de legislaciones de los estados miembros sobre máquinas (ésta directiva
deroga a ala 83/392/CEE y modificaciones, pero aún no ha sido traspuesta al derecho
español).
- R.D. 1215/1997 de 18 de julio por el que se establecen las disposiciones mínimas de
seguridad y salud para la utilización por los trabajadores de los equipos de trabajo.
- O.M. de 8/04/91 por el que se aprueba la I.T.C MSG-SM-1 del reglamento de seguridad de
máquinas referente a máquinas elementos de máquinas o sistemas de protección usados.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 6 de 15
- R.D. 830/91 de 24/05/92 y R.D. 590/89 de 19/05/89 que modifican el R.D. 1495/86 de
26/05/86 por el que se aprueba el reglamento de seguridad en máquinas.
- Ley 31/1995 de 8 de noviembre de prevención de riesgos laborales.
- UNE 74-100-88 acústica medidas del ruido aéreo emitido por las máquinas.
- UNE 74-101-88 acústica.
- UNE – EN 349;1993 distancia mínima para evitar el aplastamiento de parte del cuerpo
humano.
- UNE – EN 842:1997. Señalización visual de peligro. Requisitos generales, diseño y ensayo.
- UNE – EN 1050:1997. Principios para la evaluación del peligro.
1.2.2 Sobre Materiales
Artículo 18:
La manipulación de las piezas se hará con el mayor cuidado posible, no desembalando hasta el
instante de utilizarlas, comprobando si han sufrido algún desperfecto, en cuyo caso la pieza
será devuelta al almacén. Los órganos que han de ser engrasados tales como articulaciones,
etc., en la fase de montaje se procurará que la grasa utilizada sea neutra, únicamente estable
en el aire a temperatura comprendida entre 50 y 100 °C. Su punto de goteo debe ser lo más
alto posible y nunca inferior a 90 °C.
Artículo 19:
Todos los materiales utilizados en la fabricación han de ser de absoluta garantía.
Artículo 20:
Las piezas metálicas estarán constituidas por materiales férreos. Estarán exentas de impurezas
y de cualquier otro defecto de fábrica que modifiquen sus propiedades. Su estructura será de
grano fino y la superficie limpia y desprovista de defectos.
Artículo 21:
El aceite que se emplee para engrase será de primera calidad y sin mezclas de ningún tipo.
Artículo 22:
Los materiales a emplear en cada una de las piezas deberán corresponderse en su composición
y propiedades con los aquí citados.
Artículo 23:
Cualquier otro material para ser empleado habrá de someterse a examen y aprobación de la
Dirección Técnica.
Artículo 24:
Las características y propiedades de los materiales deben subsistir después del mecanizado y
tratamientos correspondientes.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 7 de 15
Artículo 25:
Los cortes que se hagan necesarios para proceder al mecanizado de las piezas se harán en frío.
Artículo 26:
El suministro de maquinaria se hará en perfectas condiciones debiendo reunir los siguientes
requisitos:
a) Ir totalmente engrasado y recubierto de papel fino las partes susceptibles de oxidación.
b) Todas se suministran embaladas de forma hermética y llevarán grabado en su exterior la
maquinaria que contiene, su destino y la casa suministradora.
c) Todos los gastos originados al transportador y en el almacenaje del material rechazado
serán por cuenta del ofertante.
1.2.3 Sobre Ensayos
Artículo 27:
Los materiales laminados, extrusionados y elementos tubulares deberán someterse a ensayo
de tracción, una pieza de cada lote de 25, o bien de menor cuantía dependiendo todo ello del
estado en que se reciban los materiales respecto a la posible arbitrariedad que puedan
presentar sus características técnicas.
Artículo 28:
Si los resultados de los ensayos no corresponden a los establecidos en este pliego de
condiciones, se someterán en número doble a un nuevo ensayo y si éstos resultados no son
satisfactorios serán rechazados.
Artículo 29:
Las pruebas de tracción se especificarán según las normas DIN 1542, 1543, 1602 y 1622.
Artículo 30:
Antes del pintado de la carcasa se presentarán muestras de pinturas para realizar los análisis y
ensayos correspondientes a fin de comprobar la eficacia de la misma, en cuanto a protección
se refiere, y se pintarán muestras para fijar color y acabado.
Artículo 31:
El objeto del control funcional o dinámico es la determinación de las deformaciones que
puedan presentarse y que pudieran comprometer la precisión geométrica y dimensional de las
piezas elaboradas. Este control ha de ofrecer las suficientes garantías para la seguridad de las
piezas, además de precisión geométrica y de forma.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 8 de 15
1.2.4 Sobre Pruebas
Artículo 32:
Las normas presentes de control y verificación serán representadas por los constructores, a fin
de establecer la correspondencia del productor con los requisitos exigidos de producción,
precisión y de funcionamiento. Cualquier falta de cumplimiento de las presentes normas
repercutirán en el comportamiento del comprador, en el sentido de liberarlo de este o
eximirlo de alguna de las cláusulas que pudieran afectar.
Artículo 33:
El control a máquina descargada, se hará por el constructor a medida que se construyen los
distintos órganos que constituyen la máquina y a medida que va efectuándose el montaje.
Artículo 33:
La verificación dinámica se efectuará con la máquina bajo carga. Los esfuerzos en las pruebas
deben estar comprendidos entre los límites que no produzcan deformaciones permanentes.
Artículo 34:
Todos los gastos normales ocasionados por los procesos de verificación y comprobación a que
se refiere éste pliego de condiciones, serán de cuenta del comprobador.
Artículo 35:
Si, por cualquier causa, los instrumentos previstos para la verificación no estuvieran
disponibles, podrán ser sustituidos por otros equivalentes, siempre que con ello no se
perjudique la exactitud de la precisión.
Artículo 36:
Durante la verificación no podrá hacerse ninguna separación de partes que constituyen el
sistema, la cual debe someterse al control, tal como se ha montado definitivamente. Cualquier
anormalidad que no asegure el cumplimiento exacto de este artículo, anula las pruebas que en
estas condiciones se estén ejecutando, aunque no las anteriores.
Artículo 37:
La precisión en ciertos órganos fundamentales debe estar garantizada por el constructor de la
máquina, que asume todas las responsabilidades al respecto, si bien no han de ser controladas
todas las partes de carácter funcional.
Artículo 38:
Si por alguna causa, el comprador quisiera efectuar una segunda comprobación de alguna de
las partes esenciales, lo hará a su cargo, no pudiendo exigir de la casa constructora, la
verificación de dichas partes por segunda vez.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 9 de 15
Artículo 39:
Recepción provisional: se realizará cuando se hayan terminado los trabajos objeto del presente
contrato, mediante solicitud del contratista al dueño y al Director Técnico.
Artículo 40:
El Director Técnico procederá a la inspección de los trabajos mencionados y si están en estado
de recibidos, extenderá un acta haciéndolo constar, o bien los motivos de la no aceptación en
su caso.
Artículo 41:
Recepción definitiva: seis meses después de la recepción provisional procederá el Director
Técnico a un nuevo examen, proponiendo la recepción definitiva si el conjunto de piezas
responden a las condiciones exigidas, realizándose a la vez el pago del 10% restante del coste
de fabricación, siempre y cuando resulte satisfactoria la prueba de recepción definitiva.
Artículo 42:
Una vez realizada y aceptada la revisión definitiva, el contratista queda libre de toda
responsabilidad en todo lo relacionado con la elaboración del presente proyecto.
1.3. PLIEGO DE CONDICIONES ECONÓMICAS
Artículo 43:
El cliente tendrá relación directa con el Director Técnico, con el que realizará un contrato
haciendo constar todo tipo de condiciones generales y económicas y la responsabilidad
general que éste tiene ante él, de todo lo referente a la ejecución material de que consta el
presente proyecto.
Artículo 44:
El Director Técnico contratará a su vez la empresa contratista y esta quedará así relacionada
con él y será responsable ante el mismo de todo lo que afecte o sea su incumbencia en lo
relacionado con la ejecución del conjunto de piezas.
Artículo 45:
Todos los documentos del contrato deberán ir sellados y registrados por cuenta del
contratista.
Cualquier multa que se derive del incumplimiento de estos requisitos será por cuenta del
contratista.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 10 de 15
Artículo 46:
El Pago del costo del presente proyecto, se efectuará de la siguiente forma:
El 40% en el momento en que se hace la entrega del proyecto y firma del contrato, el 50%, que
en total suman un 90%, a la mitad aproximadamente de la fabricación del conjunto de piezas,
según lo estime conveniente el Ingeniero Técnico de fabricación. Y el 10% restante una vez que
se efectúa la recepción definitiva.
Artículo 47:
El Director Técnico percibirá un 50% del total por su trabajo; cobrándose esa cantidad por
certificaciones parciales mensuales, paralelas a las que irá pagando el cliente al contratista al
irse desarrollando la elaboración de las piezas.
Artículo 48:
El autor del proyecto percibirá el 5% del importe del proyecto, cobrando dicha cantidad una
vez entregado el proyecto al cliente y habiéndolo aceptado este.
Queda así pues responsable de todos los daños que pudieran derivarse de un mal diseño o
cálculo de cualquier pieza.
Artículo 49:
En la ejecución de las piezas, el contratista no tendrá derecho a la indemnización por el precio
mayor que pudiera costar o por errores cometidos durante la ejecución.
Artículo 50:
Como constará en el contrato, existe un plazo límite para la terminación de la elaboración de
las piezas. Dicho límite establecido previamente, aceptado por el Director Técnico y el
contratista, no deberá ser sobrepasado.
Artículo 51:
Para que cumpla dicho límite, el dueño podrá establecer multas al Director Técnico por cada
día de retraso en la ejecución de las mismas, con cantidades fijadas en el contrato.
A su vez el Director Técnico podrá ponerlas al contratista, de acuerdo con el contrato realizado
entre ambos; siendo la cuantía dependiente de la fijada por el cliente al Director Técnico más
independiente de las exigidas del Director al contratista.
Artículo 52:
Una vez realizada la recepción definitiva, se liquidará al contratista la cantidad que se le
adeude.
Artículo 53:
La ejecución de los trabajos se contratará por unidades ejecutadas con arreglo a los
documentos del proyecto y en las cifras fijadas que formarán el presupuesto general para la
ejecución del trabajo contratado.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 11 de 15
El contratista someterá a la aprobación de la dirección técnica, cualquier trabajo que desee
hacer de diferentes unidades de trabajo y de igual forma se procederá con las casas
suministradoras.
La resolución de la dirección técnica será inapelable, y su inobservancia por parte del
contratista dará derecho a la entidad propietaria a ser indemnizado en los daños y perjuicios.
Artículo 54:
Los contratos se adjudicarán en general en forma privada. El cuerpo de estos documentos
contendrá:
Comunicación de la adjudicación de una cláusula en la que se exprese terminantemente que el
contrato está conforme al pliego de condiciones y demás documentos del presente proyecto.
El contratista antes de firmas el documento correspondiente, así como todas las escrituras,
habrá firmado también su conformidad al pliego de condiciones particulares que ha de regir su
trabajo en los planos y en el presupuesto general.
Artículo 55:
Ambas se someterán en sus diferencias al arbitraje amigable compuestas por vía de equidad,
designándose uno de ellos por el propietario, y otro por el contratista.
Artículo 56:
Se considerará causas suficientes de rescisión de contrato las que a continuación se señalan:
A) La muerte o incapacidad del contratista;
B) La quiebra del mismo;
C) Las alteraciones del contrato por las siguientes causas:
1. La modificación del proyecto en forma tal que presente alteraciones fundamentales del
mismo, a juicio de la Dirección Técnica, y en cualquier caso, siempre que la variación de
presupuesto de ejecución como consecuencia de estas variaciones, represente más o menos el
25% del importe total de aquel.
2. La modificación de unidades siempre que estas sean de un 40%.
D) La suspensión de la construcción comenzada siempre que el plazo de suspensión haya
excedido de tres meses como mínimo.
E) El no dar comienzo la contrata a los trabajos dentro del plazo señalado en las condiciones
particulares del siguiente proyecto.
F) La terminación de plazo de ejecución del reductor sin llegar a la culminación de éste.
G) El abandono de la ejecución sin causa justificada a juicio de la dirección técnica.
H) La mala fe en la ejecución de los trabajos a juicio de dicha dirección.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 12 de 15
1.4 PLIEGO DE CONDICIONES PARTICULARES Y TÉCNICAS
Artículo 57:
En el lugar de trabajo mientras esté presente el reductor, se procurará ser ordenado tanto en
materiales almacenados, como en los retales o desperdicios que de ello deriven, a fin de evitar
entorpecimientos en las operaciones y posibles que por dicha causa pudieran originarse.
Artículo 58:
El vestido de trabajo deberá ser cerrado y cubrir la corbata en caso de tenerla mientras se
trabaja.
Las mangas estarán abotonadas o remangadas por delante. La chaqueta de trabajo no debe
tener bolsillo en el pecho, ya que podría ser enganchado y arrancado. No se llevará cinturón.
Uso obligatorio de botas protectoras y mandil.
Artículo 59:
Para aquellos trabajos en los cuales el operario tenga que trabajar con taladrina o algún
refrigerante que pueda dañar la piel, deberá protegerse con mandil y guantes de goma.
Artículo 60:
Las gafas como medida preventiva son indispensables en las operaciones de torneado, afilado
de herramientas, desbarbado, limado, etc.
Artículo 61:
La manipulación de virutas se hará con ganchos o palas dependiendo del estado de la máquina
que las arroja; torno, fresadora, etc.
Artículo 62:
Nunca se debe utilizar el líquido refrigerante de las máquinas para lavarse las manos ya que
puede provocar enfermedades en la piel (eczemas, botón de aceite, infecciones, etc.). Para ello
existen pastas, polvos, etc., muy recomendables para el lavado de las manos después del
trabajo en el taller.
Artículo 63:
Los útiles, herramientas y calibres deberán estar colocados cerca del puesto de trabajo
correspondiente y próximos al operario, en el caso de emplearse en cada operación, pero
nunca se deben apoyar o dejar encima de cualquier órgano de la máquina.
Artículo 64:
Deberán prohibirse o llamar la atención sobre elementos que puedan aparecer, el llevar
alianzas, sortijas o pulseras durante el trabajo, ya que pueden engancharse en cualquier
órgano de la máquina.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 13 de 15
Artículo 65:
En aquellas máquinas que debido a la velocidad de corte elevada al efectuar el trabajo o
debido a la naturaleza del material, la viruta arrojada salta sobre el operario se debe proveer
éste de una protección o pantalla.
Artículo 66:
Bajo ningún concepto se deberá eliminar de la máquina aquellas carcasas, protecciones,
órganos de seguridad, etc., que posean de origen las citadas máquinas herramientas.
Artículo 67:
En el taller, y en un sitio fácilmente accesible, en la pared y a una altura de 1,20 m hasta su
base deberá haber un extintor de incendios con sus instrucciones de manejo bien visibles.
Artículo 68:
Todo los órganos de transmisión que sean giratorios, como discos porta-satélites, ejes,
engranajes, etc. Deberán ir cubiertos con carcasas de protección para evitar el contacto directo
del operario con ellos y así evitar el posible riesgo, causa en definitiva del accidente.
Artículo 69:
En la operación de pintado es conveniente el uso de mascarilla del operario, en prevención de
posibles intoxicaciones.
Artículo 70:
Obligaciones generales del contratista:
A) Cumplir personalmente y hacer cumplir al personal a sus órdenes de todas las disposiciones
de seguridad e higiene en el trabajo que sean práctica y directamente aplicables a la ejecución
que nos ocupa.
B) Adoptar cuantas medidas sean necesarias en orden a la más perfecta organización y plena
eficacia de la debida prevención de riesgos que puedan afectar a la vida, integridad y salud de
los operarios que participen en la construcción del objeto.
C) Proveer de todo cuanto fuera preciso tanto para el mantenimiento de máquina, material y
útiles de trabajo en las debidas condiciones de seguridad así como para la normal realización
de los servicios médicos en prevención de posibles accidentes.
D) Facilitar gratuitamente a los trabajadores los medios de protección personal de carácter
preventivo adecuado a los trabajos a realizar.
E) Observar con todo rigor y exactitud las normas vigentes en lo que se refiere a la ocupación
de trabajadores en máquinas.
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 14 de 15
F) Establecer determinados niveles jerárquicos mediante instrucciones escritas indicando las
facultades y deberes del personal para evitar y prevenir accidentes durante la ejecución de la
obra.
G) Facilitar instrucción al personal antes de comenzar a desempeñar cualquier puesto de
trabajo, acerca de los riesgos y peligros que en el puedan afectarle.
H) Adoptar las medidas oportunas para que el personal a su cargo cumpla con todos los
requisitos legales establecidos en:
- Ley 31/1995 de Prevención de riesgos laborales.
- R.D. 39/1997 por el que se aprueba el Reglamento de los servicios de prevención.
- R.D. 1435/1992 sobre las disposiciones de aplicación de la Directiva del Consejo 89/392/CEE
relativa a la aproximación de las legislaciones de los estados miembros sobre máquinas.
- R.D. 56/1995 por el que se modifica el R.D. 1435/192.
- R.D. 1495/1986, por el que se aprueba el Reglamento de Seguridad de las máquinas.
- R.D. 590/1991, por el que se modifica el R.D. 1495/1986.
- R.D. 830/ 1991, por el que se modifica el R.D. 1495/1986.
- Orden de 8/4/1991, por la que se aprueba la Instrucción Técnica Complementaria MSG-SM-l
del Reglamento de Seguridad en las máquinas, referente a máquinas, elementos de máquinas
o sistemas de protección usados.
I) Prohibir o paralizar, en su caso, los trabajos en los que advierte peligro inminente de
accidente o de otros siniestros profesionales, cuando no sea posible el empleo de los medios
adecuados para evitarlos.
J) Es obligación del Contratista ejecutar cuanto sea necesario para la buena construcción y
aspecto de las obras cuando no se halle expresamente estipulado en este Pliego de
Condiciones, debiendo cumplir lo que sin separarse de su espíritu y recta interpretación
disponga por escrito la Dirección de la Obra. La interpretación del proyecto corresponde, en
cualquier caso, al Ingeniero Director. El contratista queda obligado a suscribir, con su
conformidad o reparos, los partes o informes establecidos para las obras siempre que sea
requerido para ello. Las órdenes del Contratista se darán por escrito y numeradas
correlativamente. Aquel quedará obligado a firmar el recibido en el duplicado de la orden.
El contratista está obligado al cumplimiento de las disposiciones vigentes en materia laboral,
de seguridad social, de seguridad y salud en el trabajo y en materia fiscal. El Contratista
designará el personal técnico responsable de la seguridad y salud que asuma las obligaciones
correspondientes en cada centro de trabajo. El incumplimiento de estas obligaciones por parte
del Contratista o la infracción de las disposiciones sobre seguridad por parte del personal
técnico designado por él, no implicará responsabilidad alguna para la Administración.
Artículo 71:
En el ejercicio de potestad disciplinaria y conforme al procedimiento legalmente establecido, el
Director Técnico o el contratista, podrá sancionar adecuadamente a los trabajadores que estén
DOCUMENTO Nº 3
PLIEGO DE CONDICIONES
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 15 de 15
a su servicio que infrinjan los preceptos de la ordenanza general de Seguridad e Higiene en el
Trabajo y sus disposiciones complementarias.
Las sanciones que podrán imponerse serán las siguientes:
A) Por falta leve: Amonestación verbal, por escrito, multa de un día de haber.
B) Por falta grave: Amonestación pública, traslado de puesto de trabajo, multa de 2 a 6 días de
haber, suspensión de empleo de 1 a 10 días, inhabilitación por plazo no superior a un año para
el acceso a la categoría superior.
C) Por falta muy grave: Multa de 7 a 15 días de haber, suspensión de empleo y sueldo de 11
días a 2 semanas, inhabilitación de 2 años para el acceso a la categoría superior y despido.
1.5 PLIEGO DE CONDICIONES DE SEGURIDAD E HIGIENE
Artículo 72:
El contratista será responsable de los accidentes que por inexperiencia o descuido
sobreviniesen en la realización de los trabajos, ante los Tribunales de Justicia.
Artículo 73:
Queda el contratista obligado a cumplir todo lo estipulado en todas la leyes de reglamento de
carácter oficial, así como a las demás leyes y disposiciones vigentes que sean de aplicación
durante los trabajos.
El ingeniero Técnico Industrial:
Miguel Ángel Hernández Rodríguez
Cartagena, 27 de Octubre de 2011
UNIVERSIDAD POLITÉCNICA DE CARTAGENA
E.T.S.I.I
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA
Diseño del conjunto eje-acoplamiento-reductora epicicloidal
Documento Nº4. Presupuesto
Peticionario: Departo. de Ingeniería Mecánica, Universidad Politécnica de Cartagena.
Nombre: Miguel Ángel Hernández Rodríguez
Lugar: Cartagena
Fecha: 27 de Octubre de 2011.
DOCUMENTO Nº4 PRESUPUESTO
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 0 de 17
ÍNDICE
ESTADO DE MEDICIONES ......................................................................................................................... 1
CUADRO DE PRECIOS UNITARIOS ............................................................................................................ 7
PRESUPUESTO GENERAL .......................................................................................................................... 9
RESUMEN DEL PRESUPUESTO ................................................................................................................ 17
UNIVERSIDAD POLITÉCNICA DE CARTAGENA
E.T.S.I.I
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA Diseño del conjunto eje-acoplamiento-reductora epicicloidal
Documento Nº4 Presupuesto
Estado de mediciones
Peticionario: Departo. de Ingeniería Mecánica Universidad Politécnica de Cartagena. Nombre: Miguel Ángel Hernández Rodríguez Lugar: Cartagena Fecha: 27 Octubre de 2011
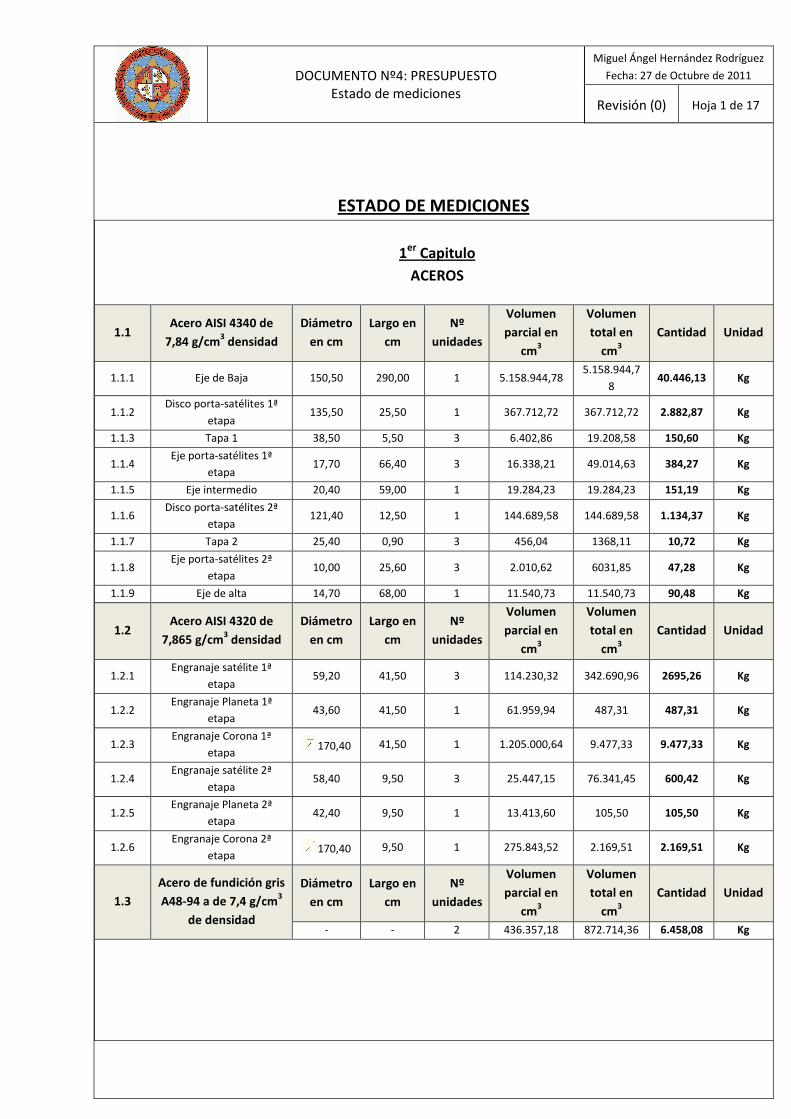
DOCUMENTO Nº4: PRESUPUESTO Estado de mediciones
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 1 de 17
ESTADO DE MEDICIONES
1er Capitulo
ACEROS
1.1 Acero AISI 4340 de
7,84 g/cm3 densidad
Diámetro
en cm
Largo en
cm
Nº
unidades
Volumen
parcial en
cm3
Volumen
total en
cm3
Cantidad Unidad
1.1.1 Eje de Baja 150,50 290,00 1 5.158.944,78 5.158.944,7
8 40.446,13 Kg
1.1.2 Disco porta-satélites 1ª
etapa 135,50 25,50 1 367.712,72 367.712,72 2.882,87 Kg
1.1.3 Tapa 1 38,50 5,50 3 6.402,86 19.208,58 150,60 Kg
1.1.4 Eje porta-satélites 1ª
etapa 17,70 66,40 3 16.338,21 49.014,63 384,27 Kg
1.1.5 Eje intermedio 20,40 59,00 1 19.284,23 19.284,23 151,19 Kg
1.1.6 Disco porta-satélites 2ª
etapa 121,40 12,50 1 144.689,58 144.689,58 1.134,37 Kg
1.1.7 Tapa 2 25,40 0,90 3 456,04 1368,11 10,72 Kg
1.1.8 Eje porta-satélites 2ª
etapa 10,00 25,60 3 2.010,62 6031,85 47,28 Kg
1.1.9 Eje de alta 14,70 68,00 1 11.540,73 11.540,73 90,48 Kg
1.2 Acero AISI 4320 de
7,865 g/cm3 densidad
Diámetro
en cm
Largo en
cm
Nº
unidades
Volumen
parcial en
cm3
Volumen
total en
cm3
Cantidad Unidad
1.2.1 Engranaje satélite 1ª
etapa 59,20 41,50 3 114.230,32 342.690,96 2695,26 Kg
1.2.2 Engranaje Planeta 1ª
etapa 43,60 41,50 1 61.959,94 487,31 487,31 Kg
1.2.3 Engranaje Corona 1ª
etapa 170,40 41,50 1 1.205.000,64 9.477,33 9.477,33 Kg
1.2.4 Engranaje satélite 2ª
etapa 58,40 9,50 3 25.447,15 76.341,45 600,42 Kg
1.2.5 Engranaje Planeta 2ª
etapa 42,40 9,50 1 13.413,60 105,50 105,50 Kg
1.2.6 Engranaje Corona 2ª
etapa 170,40 9,50 1 275.843,52 2.169,51 2.169,51 Kg
1.3
Acero de fundición gris
A48-94 a de 7,4 g/cm3
de densidad
Diámetro
en cm
Largo en
cm
Nº
unidades
Volumen
parcial en
cm3
Volumen
total en
cm3
Cantidad Unidad
- - 2 436.357,18 872.714,36 6.458,08 Kg
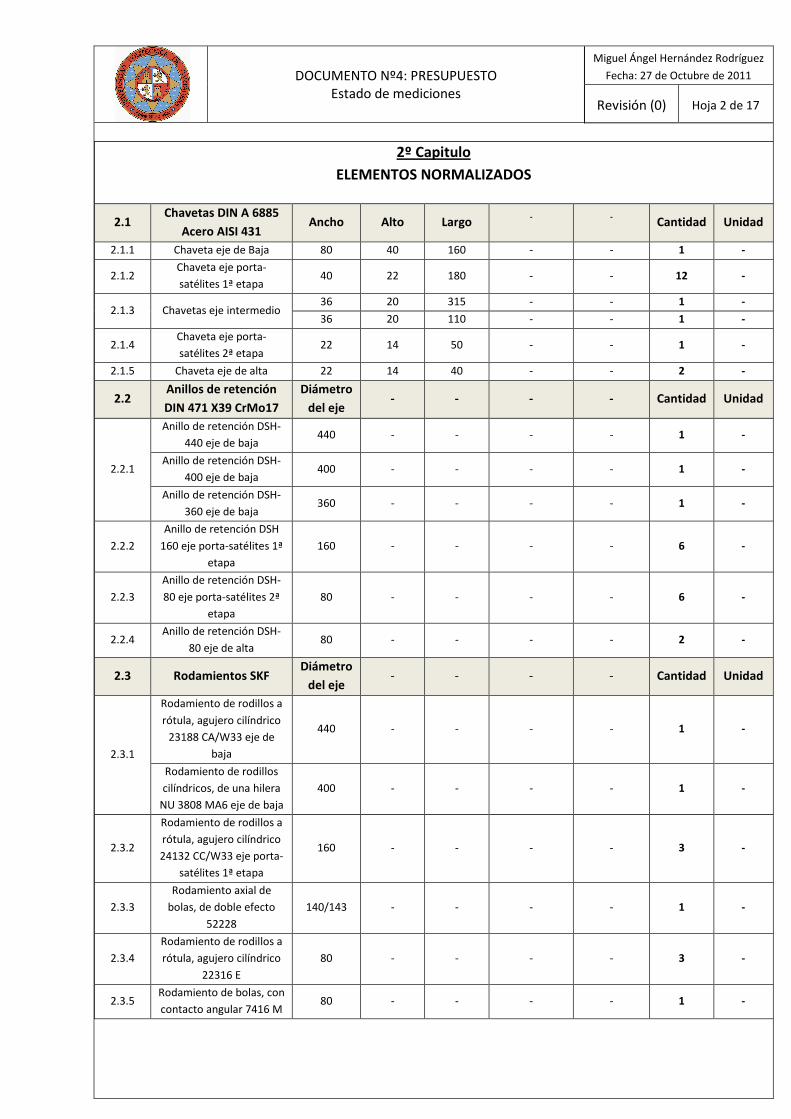
DOCUMENTO Nº4: PRESUPUESTO Estado de mediciones
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 2 de 17
2º Capitulo
ELEMENTOS NORMALIZADOS
2.1 Chavetas DIN A 6885
Acero AISI 431 Ancho Alto Largo
- - Cantidad Unidad
2.1.1 Chaveta eje de Baja 80 40 160 - - 1 -
2.1.2 Chaveta eje porta-
satélites 1ª etapa 40 22 180 - - 12 -
2.1.3 Chavetas eje intermedio 36 20 315 - - 1 -
36 20 110 - - 1 -
2.1.4 Chaveta eje porta-
satélites 2ª etapa 22 14 50 - - 1 -
2.1.5 Chaveta eje de alta 22 14 40 - - 2 -
2.2 Anillos de retención
DIN 471 X39 CrMo17
Diámetro
del eje - - - - Cantidad Unidad
2.2.1
Anillo de retención DSH-
440 eje de baja 440 - - - - 1 -
Anillo de retención DSH-
400 eje de baja 400 - - - - 1 -
Anillo de retención DSH-
360 eje de baja 360 - - - - 1 -
2.2.2
Anillo de retención DSH
160 eje porta-satélites 1ª
etapa
160 - - - - 6 -
2.2.3
Anillo de retención DSH-
80 eje porta-satélites 2ª
etapa
80 - - - - 6 -
2.2.4 Anillo de retención DSH-
80 eje de alta 80 - - - - 2 -
2.3 Rodamientos SKF Diámetro
del eje - - - - Cantidad Unidad
2.3.1
Rodamiento de rodillos a
rótula, agujero cilíndrico
23188 CA/W33 eje de
baja
440 - - - - 1 -
Rodamiento de rodillos
cilíndricos, de una hilera
NU 3808 MA6 eje de baja
400 - - - - 1 -
2.3.2
Rodamiento de rodillos a
rótula, agujero cilíndrico
24132 CC/W33 eje porta-
satélites 1ª etapa
160 - - - - 3 -
2.3.3
Rodamiento axial de
bolas, de doble efecto
52228
140/143 - - - - 1 -
2.3.4
Rodamiento de rodillos a
rótula, agujero cilíndrico
22316 E
80 - - - - 3 -
2.3.5 Rodamiento de bolas, con
contacto angular 7416 M 80 - - - - 1 -
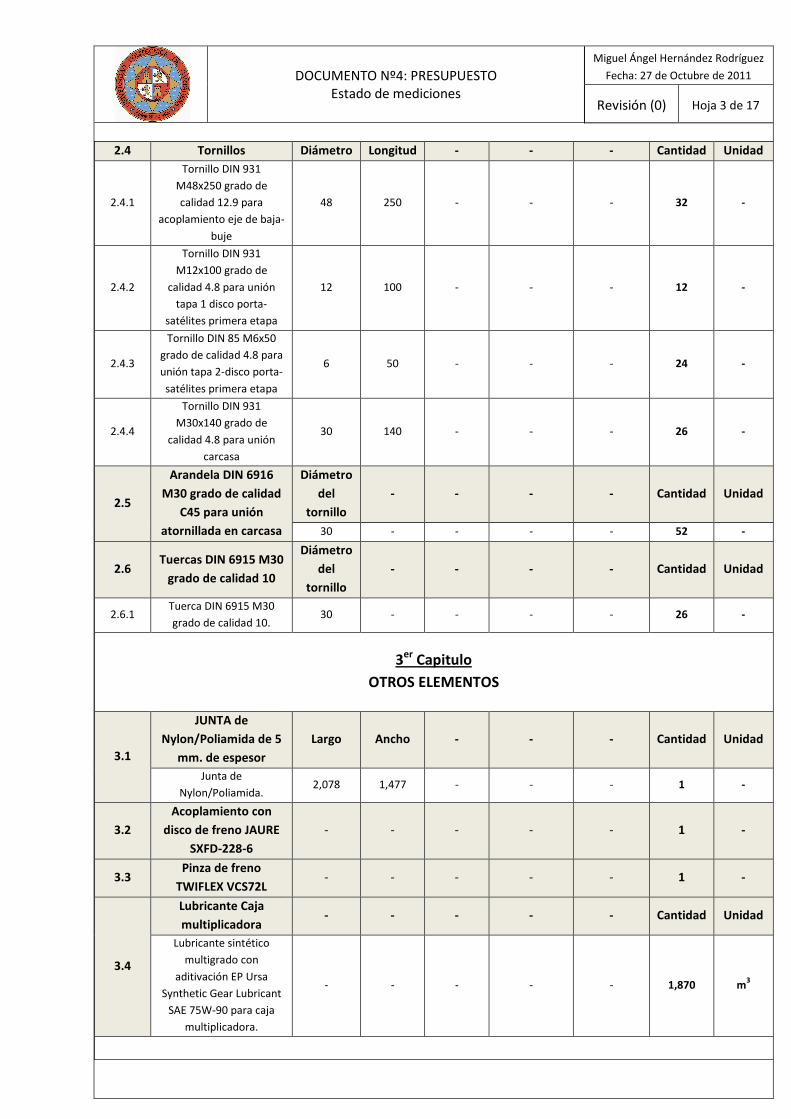
DOCUMENTO Nº4: PRESUPUESTO Estado de mediciones
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 3 de 17
2.4 Tornillos Diámetro Longitud - - - Cantidad Unidad
2.4.1
Tornillo DIN 931
M48x250 grado de
calidad 12.9 para
acoplamiento eje de baja-
buje
48 250 - - - 32 -
2.4.2
Tornillo DIN 931
M12x100 grado de
calidad 4.8 para unión
tapa 1 disco porta-
satélites primera etapa
12 100 - - - 12 -
2.4.3
Tornillo DIN 85 M6x50
grado de calidad 4.8 para
unión tapa 2-disco porta-
satélites primera etapa
6 50 - - - 24 -
2.4.4
Tornillo DIN 931
M30x140 grado de
calidad 4.8 para unión
carcasa
30 140 - - - 26 -
2.5
Arandela DIN 6916
M30 grado de calidad
C45 para unión
atornillada en carcasa
Diámetro
del
tornillo
- - - - Cantidad Unidad
30 - - - - 52 -
2.6 Tuercas DIN 6915 M30
grado de calidad 10
Diámetro
del
tornillo
- - - - Cantidad Unidad
2.6.1 Tuerca DIN 6915 M30
grado de calidad 10. 30 - - - - 26 -
3er Capitulo
OTROS ELEMENTOS
3.1
JUNTA de
Nylon/Poliamida de 5
mm. de espesor
Largo Ancho - - - Cantidad Unidad
Junta de
Nylon/Poliamida. 2,078 1,477 - - - 1 -
3.2
Acoplamiento con
disco de freno JAURE
SXFD-228-6
- - - - - 1 -
3.3 Pinza de freno
TWIFLEX VCS72L - - - - - 1 -
3.4
Lubricante Caja
multiplicadora - - - - - Cantidad Unidad
Lubricante sintético
multigrado con
aditivación EP Ursa
Synthetic Gear Lubricant
SAE 75W-90 para caja
multiplicadora.
- - - - - 1,870 m3
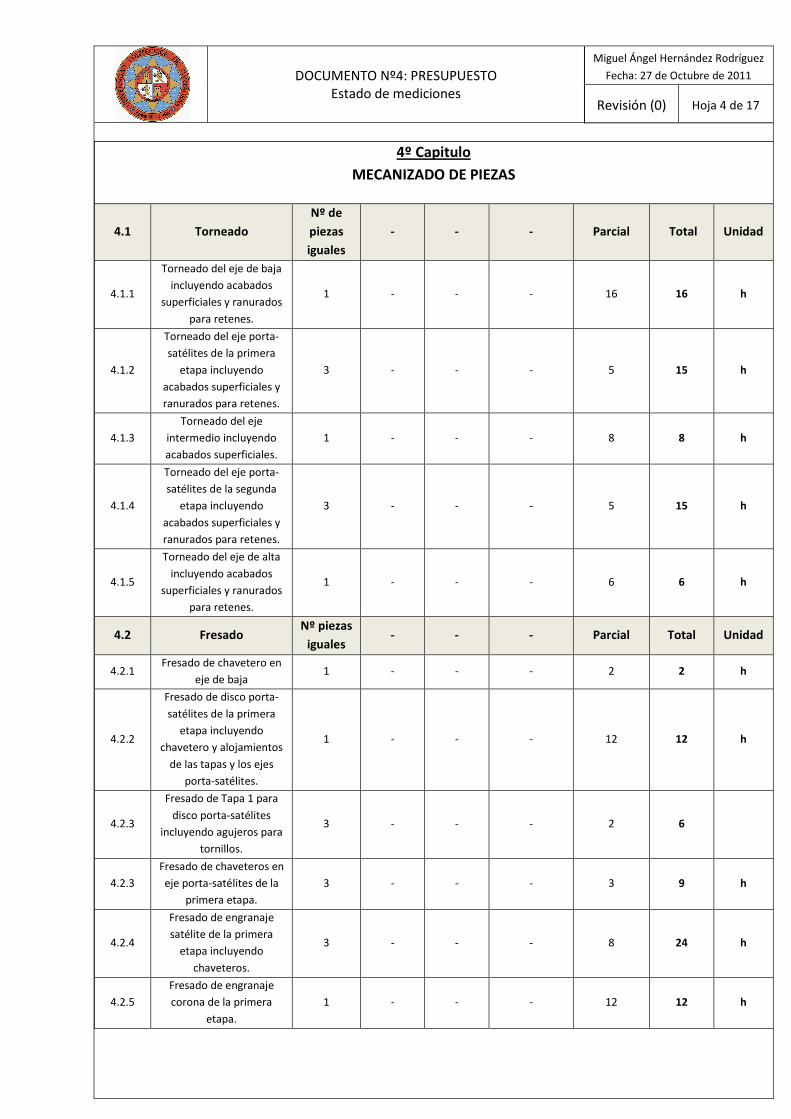
DOCUMENTO Nº4: PRESUPUESTO Estado de mediciones
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 4 de 17
4º Capitulo
MECANIZADO DE PIEZAS
4.1 Torneado
Nº de
piezas
iguales
- - - Parcial Total Unidad
4.1.1
Torneado del eje de baja
incluyendo acabados
superficiales y ranurados
para retenes.
1 - - - 16 16 h
4.1.2
Torneado del eje porta-
satélites de la primera
etapa incluyendo
acabados superficiales y
ranurados para retenes.
3 - - - 5 15 h
4.1.3
Torneado del eje
intermedio incluyendo
acabados superficiales.
1 - - - 8 8 h
4.1.4
Torneado del eje porta-
satélites de la segunda
etapa incluyendo
acabados superficiales y
ranurados para retenes.
3 - - - 5 15 h
4.1.5
Torneado del eje de alta
incluyendo acabados
superficiales y ranurados
para retenes.
1 - - - 6 6 h
4.2 Fresado Nº piezas
iguales - - - Parcial Total Unidad
4.2.1 Fresado de chavetero en
eje de baja 1 - - - 2 2 h
4.2.2
Fresado de disco porta-
satélites de la primera
etapa incluyendo
chavetero y alojamientos
de las tapas y los ejes
porta-satélites.
1 - - - 12 12 h
4.2.3
Fresado de Tapa 1 para
disco porta-satélites
incluyendo agujeros para
tornillos.
3 - - - 2 6
4.2.3
Fresado de chaveteros en
eje porta-satélites de la
primera etapa.
3 - - - 3 9 h
4.2.4
Fresado de engranaje
satélite de la primera
etapa incluyendo
chaveteros.
3 - - - 8 24 h
4.2.5
Fresado de engranaje
corona de la primera
etapa.
1 - - - 12 12 h

DOCUMENTO Nº4: PRESUPUESTO Estado de mediciones
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 5 de 17
4.2.6
Fresado de engranaje
planeta de la primera
etapa incluyendo
chavetero.
1 - - - 5 5 h
4.2.7 Fresado de chavetero en
eje intermedio. 1 - - - 4 4 h
4.2.8
Fresado de disco porta-
satélites de la segunda
etapa incluyendo
chavetero y alojamientos
de las tapas y los ejes
porta-satélites.
1 - - - 8 8 h
4.2.9
Fresado de chaveteros
en eje porta-satélites de
la segunda etapa.
3 - - - 3 9 h
4.2.11
Fresado de Tapa 2 para
disco porta-satélites
incluyendo agujeros para
tornillos.
3 - - - 2 6 h
4.2.10
Fresado de engranaje
satélite de la segunda
etapa incluyendo
chaveteros.
3 - - - 8 24 h
4.2.11
Fresado de engranaje
corona de la segunda
etapa.
1 - - - 8 8 h
4.2.12
Fresado del engranaje
planeta de la segunda
etapa incluyendo
chavetero.
1 - - - 5 5 h
4.2.13 Fresado de chaveteros
del eje de alta. 1 - - - 5 5 h
4.3 Taladrado Nº piezas
iguales - - - Parcial Total Unidad
4.3.1
Taladrado de agujeros
para tornillos M48 del
acoplamiento del eje de
baja con el buje
1 - - - 4 4 h
4.3.2
Taladrado de la rosca
M12 para alojamiento de
tornillos de sujeción en
disco porta-satélites de la
primera etapa
3 - - - 1 3 h
4.3.3
Taladrado de la rosca M6
para alojamiento de
tornillos de sujeción en
disco porta-satélites de la
segunda etapa.
3 - - - 1 3 h
4.4 Modelado de
fundición
Nº piezas
iguales - - - Parcial Total Unidad
4.4.1
Modelado de carcasa de
caja multiplicadora en
fundición gris.
2 - - - 16 16 h
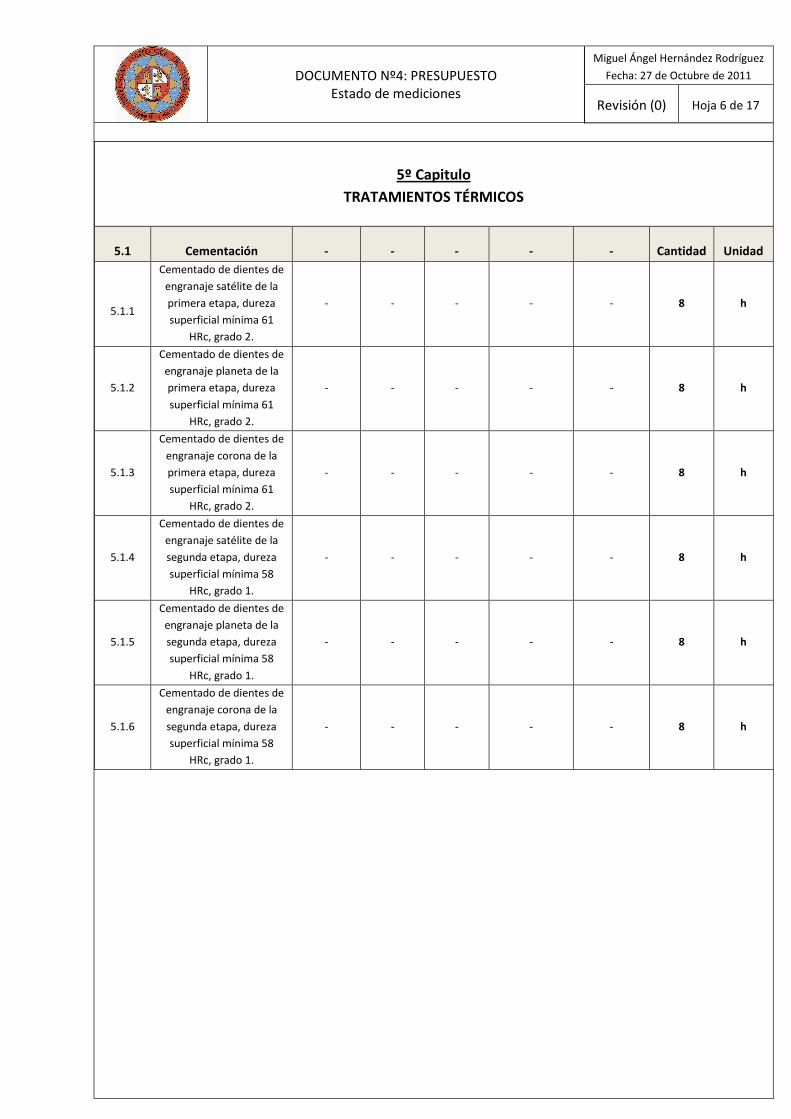
DOCUMENTO Nº4: PRESUPUESTO Estado de mediciones
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 6 de 17
5º Capitulo
TRATAMIENTOS TÉRMICOS
5.1 Cementación - - - - - Cantidad Unidad
5.1.1
Cementado de dientes de
engranaje satélite de la
primera etapa, dureza
superficial mínima 61
HRc, grado 2.
- - - - - 8 h
5.1.2
Cementado de dientes de
engranaje planeta de la
primera etapa, dureza
superficial mínima 61
HRc, grado 2.
- - - - - 8 h
5.1.3
Cementado de dientes de
engranaje corona de la
primera etapa, dureza
superficial mínima 61
HRc, grado 2.
- - - - - 8 h
5.1.4
Cementado de dientes de
engranaje satélite de la
segunda etapa, dureza
superficial mínima 58
HRc, grado 1.
- - - - - 8 h
5.1.5
Cementado de dientes de
engranaje planeta de la
segunda etapa, dureza
superficial mínima 58
HRc, grado 1.
- - - - - 8 h
5.1.6
Cementado de dientes de
engranaje corona de la
segunda etapa, dureza
superficial mínima 58
HRc, grado 1.
- - - - - 8 h
UNIVERSIDAD POLITÉCNICA DE CARTAGENA
E.T.S.I.I
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA Diseño del conjunto eje-acoplamiento-reductora epicicloidal
Documento Nº4. Presupuesto
Cuadro de precios unitarios
Peticionario: Departo. de Ingeniería Mecánica Universidad Politécnica de Cartagena. Nombre: Miguel Ángel Hernández Rodríguez Lugar: Cartagena Fecha: 27 Octubre de 2011
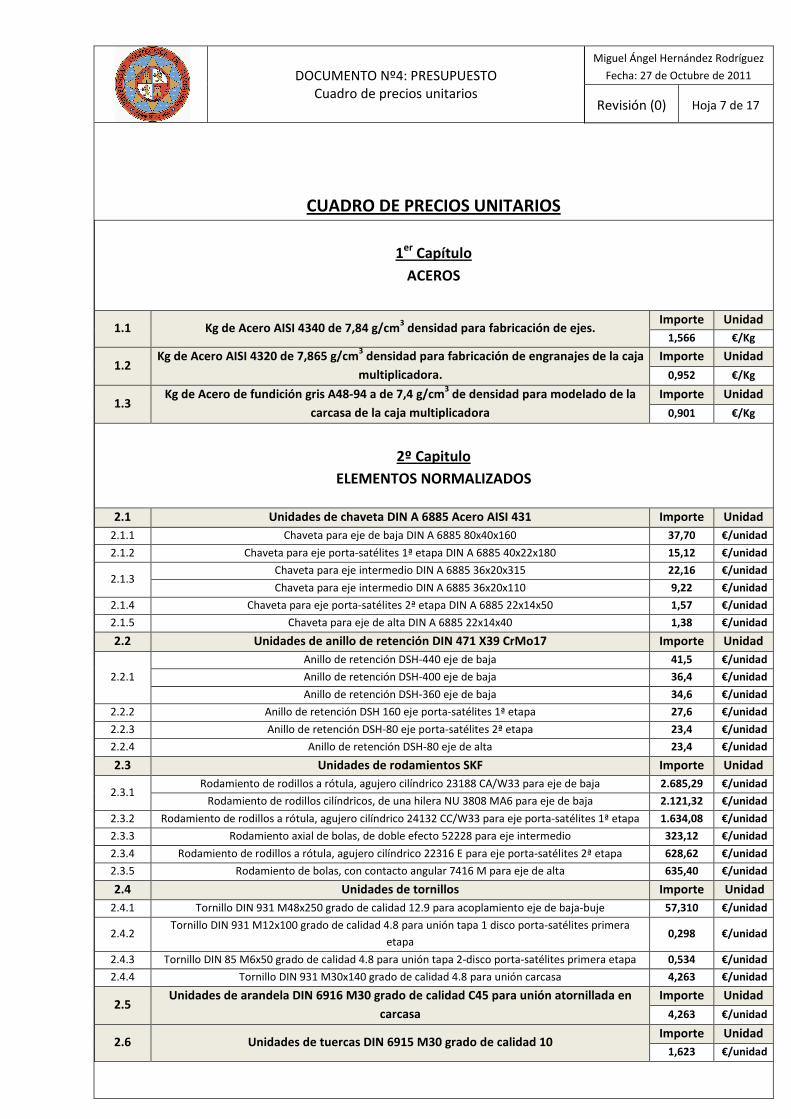
DOCUMENTO Nº4: PRESUPUESTO Cuadro de precios unitarios
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 7 de 17
CUADRO DE PRECIOS UNITARIOS
1er Capítulo
ACEROS
1.1 Kg de Acero AISI 4340 de 7,84 g/cm3 densidad para fabricación de ejes.
Importe Unidad
1,566 €/Kg
1.2 Kg de Acero AISI 4320 de 7,865 g/cm
3 densidad para fabricación de engranajes de la caja
multiplicadora.
Importe Unidad
0,952 €/Kg
1.3 Kg de Acero de fundición gris A48-94 a de 7,4 g/cm
3 de densidad para modelado de la
carcasa de la caja multiplicadora
Importe Unidad
0,901 €/Kg
2º Capitulo
ELEMENTOS NORMALIZADOS
2.1 Unidades de chaveta DIN A 6885 Acero AISI 431
Importe Unidad
2.1.1 Chaveta para eje de baja DIN A 6885 80x40x160 37,70 €/unidad
2.1.2 Chaveta para eje porta-satélites 1ª etapa DIN A 6885 40x22x180 15,12 €/unidad
2.1.3 Chaveta para eje intermedio DIN A 6885 36x20x315 22,16 €/unidad
Chaveta para eje intermedio DIN A 6885 36x20x110 9,22 €/unidad
2.1.4 Chaveta para eje porta-satélites 2ª etapa DIN A 6885 22x14x50 1,57 €/unidad
2.1.5 Chaveta para eje de alta DIN A 6885 22x14x40 1,38 €/unidad
2.2 Unidades de anillo de retención DIN 471 X39 CrMo17 Importe Unidad
2.2.1
Anillo de retención DSH-440 eje de baja 41,5 €/unidad
Anillo de retención DSH-400 eje de baja 36,4 €/unidad
Anillo de retención DSH-360 eje de baja 34,6 €/unidad
2.2.2 Anillo de retención DSH 160 eje porta-satélites 1ª etapa 27,6 €/unidad
2.2.3 Anillo de retención DSH-80 eje porta-satélites 2ª etapa 23,4 €/unidad
2.2.4 Anillo de retención DSH-80 eje de alta 23,4 €/unidad
2.3 Unidades de rodamientos SKF Importe Unidad
2.3.1 Rodamiento de rodillos a rótula, agujero cilíndrico 23188 CA/W33 para eje de baja 2.685,29 €/unidad
Rodamiento de rodillos cilíndricos, de una hilera NU 3808 MA6 para eje de baja 2.121,32 €/unidad
2.3.2 Rodamiento de rodillos a rótula, agujero cilíndrico 24132 CC/W33 para eje porta-satélites 1ª etapa 1.634,08 €/unidad
2.3.3 Rodamiento axial de bolas, de doble efecto 52228 para eje intermedio 323,12 €/unidad
2.3.4 Rodamiento de rodillos a rótula, agujero cilíndrico 22316 E para eje porta-satélites 2ª etapa 628,62 €/unidad
2.3.5 Rodamiento de bolas, con contacto angular 7416 M para eje de alta 635,40 €/unidad
2.4 Unidades de tornillos Importe Unidad
2.4.1 Tornillo DIN 931 M48x250 grado de calidad 12.9 para acoplamiento eje de baja-buje 57,310 €/unidad
2.4.2 Tornillo DIN 931 M12x100 grado de calidad 4.8 para unión tapa 1 disco porta-satélites primera
etapa 0,298 €/unidad
2.4.3 Tornillo DIN 85 M6x50 grado de calidad 4.8 para unión tapa 2-disco porta-satélites primera etapa 0,534 €/unidad
2.4.4 Tornillo DIN 931 M30x140 grado de calidad 4.8 para unión carcasa 4,263 €/unidad
2.5 Unidades de arandela DIN 6916 M30 grado de calidad C45 para unión atornillada en
carcasa
Importe Unidad
4,263 €/unidad
2.6 Unidades de tuercas DIN 6915 M30 grado de calidad 10 Importe Unidad
1,623 €/unidad
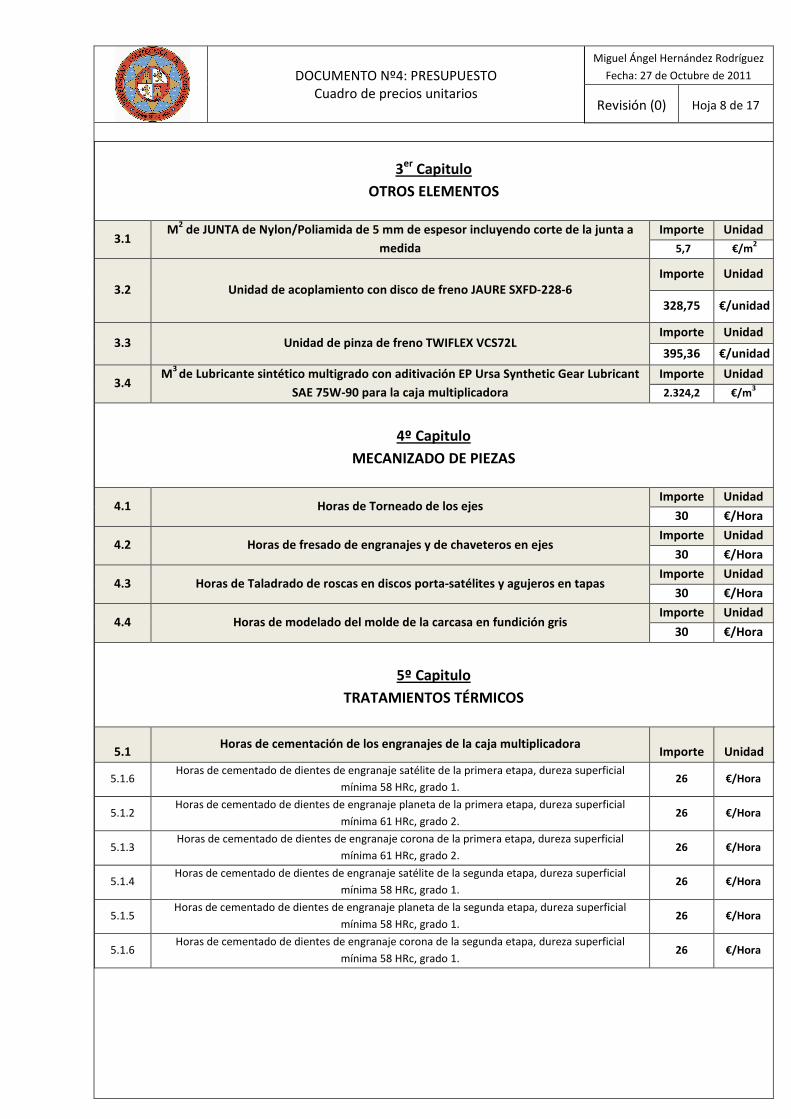
DOCUMENTO Nº4: PRESUPUESTO Cuadro de precios unitarios
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 8 de 17
3er Capitulo
OTROS ELEMENTOS
3.1 M
2 de JUNTA de Nylon/Poliamida de 5 mm de espesor incluyendo corte de la junta a
medida
Importe Unidad
5,7 €/m2
3.2 Unidad de acoplamiento con disco de freno JAURE SXFD-228-6 Importe Unidad
328,75 €/unidad
3.3 Unidad de pinza de freno TWIFLEX VCS72L Importe Unidad
395,36 €/unidad
3.4 M
3 de Lubricante sintético multigrado con aditivación EP Ursa Synthetic Gear Lubricant
SAE 75W-90 para la caja multiplicadora
Importe Unidad
2.324,2 €/m3
4º Capitulo
MECANIZADO DE PIEZAS
4.1 Horas de Torneado de los ejes Importe Unidad
30 €/Hora
4.2 Horas de fresado de engranajes y de chaveteros en ejes Importe Unidad
30 €/Hora
4.3 Horas de Taladrado de roscas en discos porta-satélites y agujeros en tapas Importe Unidad
30 €/Hora
4.4 Horas de modelado del molde de la carcasa en fundición gris Importe Unidad
30 €/Hora
5º Capitulo
TRATAMIENTOS TÉRMICOS
5.1 Horas de cementación de los engranajes de la caja multiplicadora
Importe Unidad
5.1.6 Horas de cementado de dientes de engranaje satélite de la primera etapa, dureza superficial
mínima 58 HRc, grado 1. 26 €/Hora
5.1.2 Horas de cementado de dientes de engranaje planeta de la primera etapa, dureza superficial
mínima 61 HRc, grado 2. 26 €/Hora
5.1.3 Horas de cementado de dientes de engranaje corona de la primera etapa, dureza superficial
mínima 61 HRc, grado 2. 26 €/Hora
5.1.4 Horas de cementado de dientes de engranaje satélite de la segunda etapa, dureza superficial
mínima 58 HRc, grado 1. 26 €/Hora
5.1.5 Horas de cementado de dientes de engranaje planeta de la segunda etapa, dureza superficial
mínima 58 HRc, grado 1. 26 €/Hora
5.1.6 Horas de cementado de dientes de engranaje corona de la segunda etapa, dureza superficial
mínima 58 HRc, grado 1. 26 €/Hora
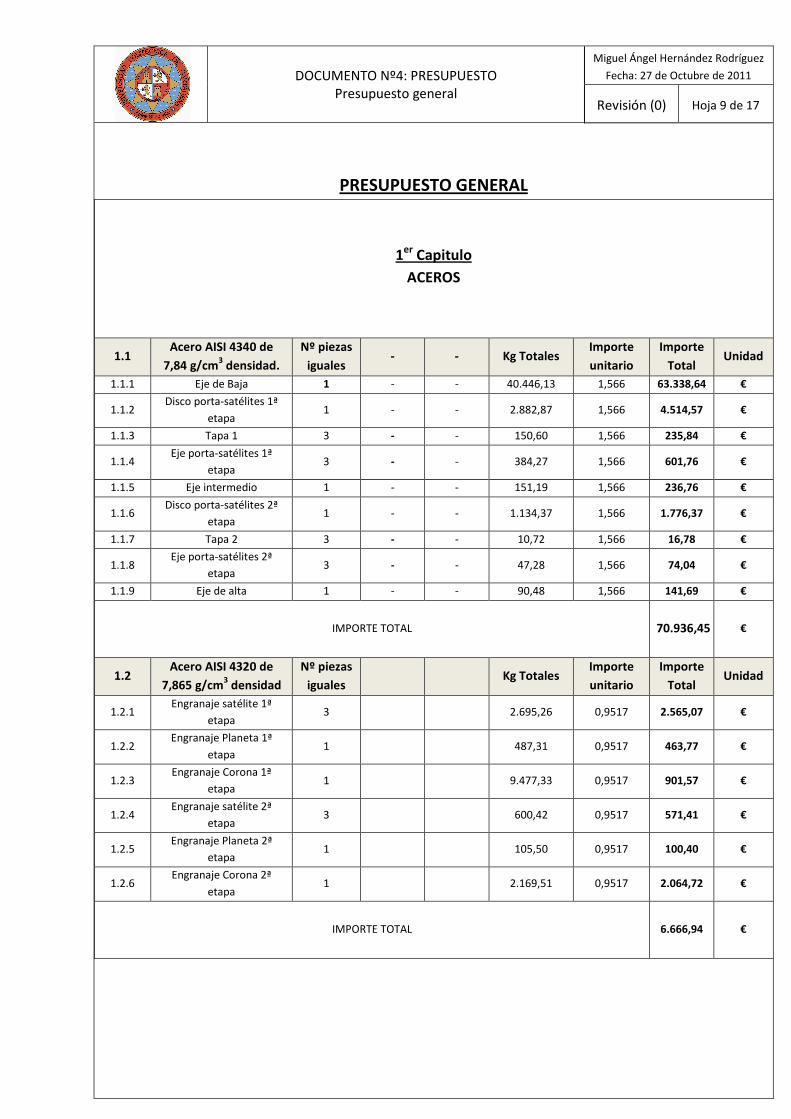
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 9 de 17
PRESUPUESTO GENERAL
1er Capitulo
ACEROS
1.1 Acero AISI 4340 de
7,84 g/cm3 densidad.
Nº piezas
iguales - - Kg Totales
Importe
unitario
Importe
Total Unidad
1.1.1 Eje de Baja 1 - - 40.446,13 1,566 63.338,64 €
1.1.2 Disco porta-satélites 1ª
etapa 1 - - 2.882,87 1,566 4.514,57 €
1.1.3 Tapa 1 3 - - 150,60 1,566 235,84 €
1.1.4 Eje porta-satélites 1ª
etapa 3 - - 384,27 1,566 601,76 €
1.1.5 Eje intermedio 1 - - 151,19 1,566 236,76 €
1.1.6 Disco porta-satélites 2ª
etapa 1 - - 1.134,37 1,566 1.776,37 €
1.1.7 Tapa 2 3 - - 10,72 1,566 16,78 €
1.1.8 Eje porta-satélites 2ª
etapa 3 - - 47,28 1,566 74,04 €
1.1.9 Eje de alta 1 - - 90,48 1,566 141,69 €
IMPORTE TOTAL 70.936,45 €
1.2 Acero AISI 4320 de
7,865 g/cm3 densidad
Nº piezas
iguales Kg Totales
Importe
unitario
Importe
Total Unidad
1.2.1 Engranaje satélite 1ª
etapa 3 2.695,26 0,9517 2.565,07 €
1.2.2 Engranaje Planeta 1ª
etapa 1 487,31 0,9517 463,77 €
1.2.3 Engranaje Corona 1ª
etapa 1 9.477,33 0,9517 901,57 €
1.2.4 Engranaje satélite 2ª
etapa 3 600,42 0,9517 571,41 €
1.2.5 Engranaje Planeta 2ª
etapa 1 105,50 0,9517 100,40 €
1.2.6 Engranaje Corona 2ª
etapa 1 2.169,51 0,9517 2.064,72 €
IMPORTE TOTAL 6.666,94 €
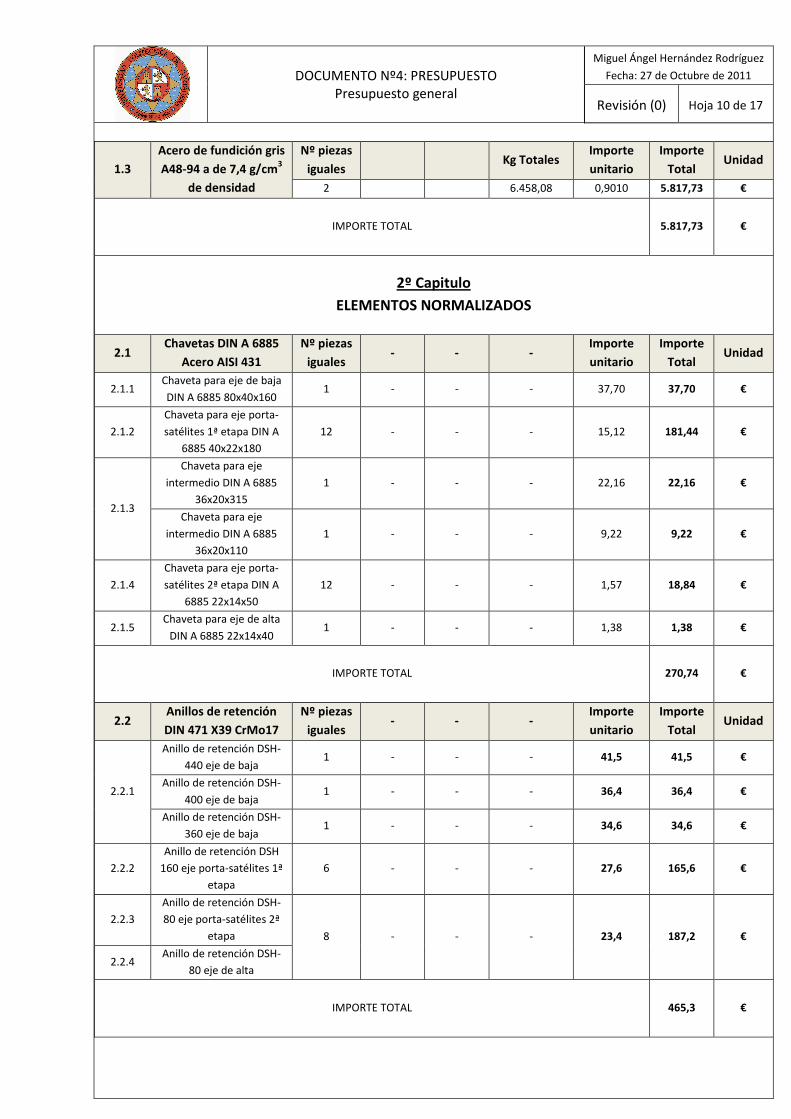
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 10 de 17
1.3
Acero de fundición gris
A48-94 a de 7,4 g/cm3
de densidad
Nº piezas
iguales Kg Totales
Importe
unitario
Importe
Total Unidad
2 6.458,08 0,9010 5.817,73 €
IMPORTE TOTAL 5.817,73 €
2º Capitulo
ELEMENTOS NORMALIZADOS
2.1 Chavetas DIN A 6885
Acero AISI 431
Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
2.1.1 Chaveta para eje de baja
DIN A 6885 80x40x160 1 - - - 37,70 37,70 €
2.1.2
Chaveta para eje porta-
satélites 1ª etapa DIN A
6885 40x22x180
12 - - - 15,12 181,44 €
2.1.3
Chaveta para eje
intermedio DIN A 6885
36x20x315
1 - - - 22,16 22,16 €
Chaveta para eje
intermedio DIN A 6885
36x20x110 1 - - - 9,22 9,22 €
2.1.4
Chaveta para eje porta-
satélites 2ª etapa DIN A
6885 22x14x50
12 - - - 1,57 18,84 €
2.1.5 Chaveta para eje de alta
DIN A 6885 22x14x40 1 - - - 1,38 1,38 €
IMPORTE TOTAL 270,74 €
2.2 Anillos de retención
DIN 471 X39 CrMo17
Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
2.2.1
Anillo de retención DSH-
440 eje de baja 1 - - - 41,5 41,5 €
Anillo de retención DSH-
400 eje de baja 1 - - - 36,4 36,4 €
Anillo de retención DSH-
360 eje de baja 1 - - - 34,6 34,6 €
2.2.2
Anillo de retención DSH
160 eje porta-satélites 1ª
etapa
6 - - - 27,6 165,6 €
2.2.3
Anillo de retención DSH-
80 eje porta-satélites 2ª
etapa 8 - - - 23,4 187,2 €
2.2.4 Anillo de retención DSH-
80 eje de alta
IMPORTE TOTAL 465,3 €
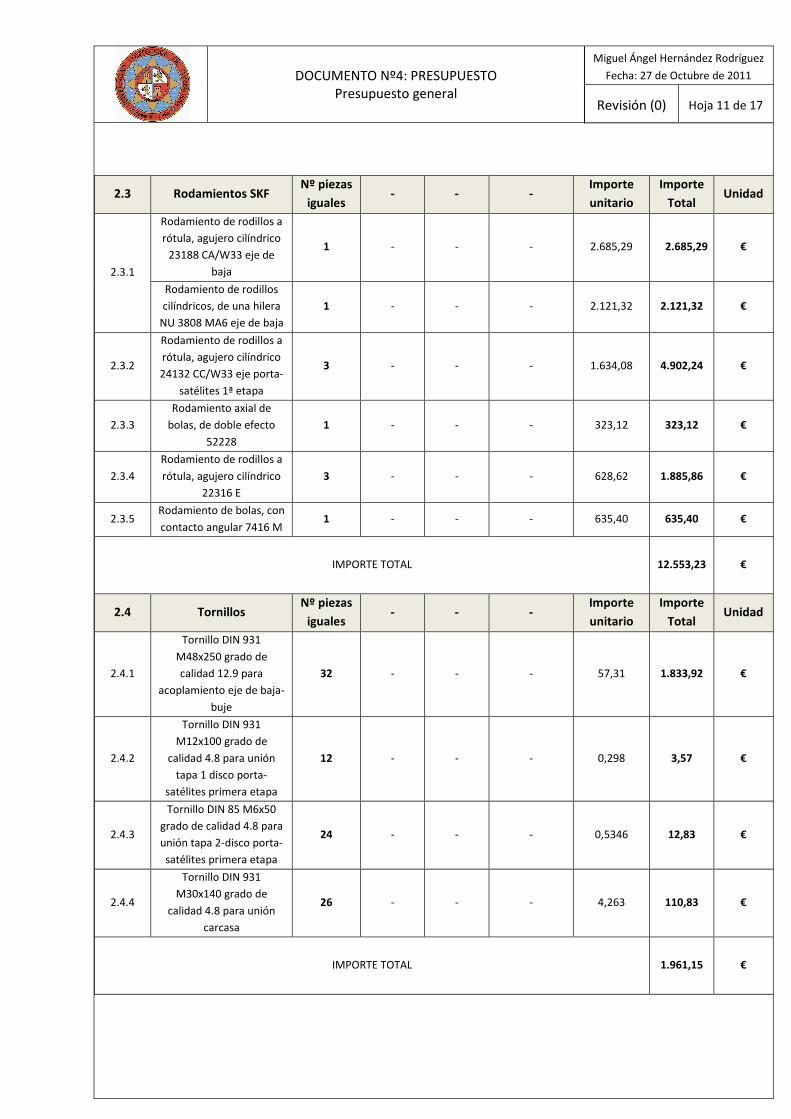
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 11 de 17
2.3 Rodamientos SKF Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
2.3.1
Rodamiento de rodillos a
rótula, agujero cilíndrico
23188 CA/W33 eje de
baja
1 - - - 2.685,29 2.685,29 €
Rodamiento de rodillos
cilíndricos, de una hilera
NU 3808 MA6 eje de baja
1 - - - 2.121,32 2.121,32 €
2.3.2
Rodamiento de rodillos a
rótula, agujero cilíndrico
24132 CC/W33 eje porta-
satélites 1ª etapa
3 - - - 1.634,08 4.902,24 €
2.3.3
Rodamiento axial de
bolas, de doble efecto
52228
1 - - - 323,12 323,12 €
2.3.4
Rodamiento de rodillos a
rótula, agujero cilíndrico
22316 E
3 - - - 628,62 1.885,86 €
2.3.5 Rodamiento de bolas, con
contacto angular 7416 M 1 - - - 635,40 635,40 €
IMPORTE TOTAL 12.553,23 €
2.4 Tornillos Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
2.4.1
Tornillo DIN 931
M48x250 grado de
calidad 12.9 para
acoplamiento eje de baja-
buje
32 - - - 57,31 1.833,92 €
2.4.2
Tornillo DIN 931
M12x100 grado de
calidad 4.8 para unión
tapa 1 disco porta-
satélites primera etapa
12 - - - 0,298 3,57 €
2.4.3
Tornillo DIN 85 M6x50
grado de calidad 4.8 para
unión tapa 2-disco porta-
satélites primera etapa
24 - - - 0,5346 12,83 €
2.4.4
Tornillo DIN 931
M30x140 grado de
calidad 4.8 para unión
carcasa
26 - - - 4,263 110,83 €
IMPORTE TOTAL 1.961,15 €
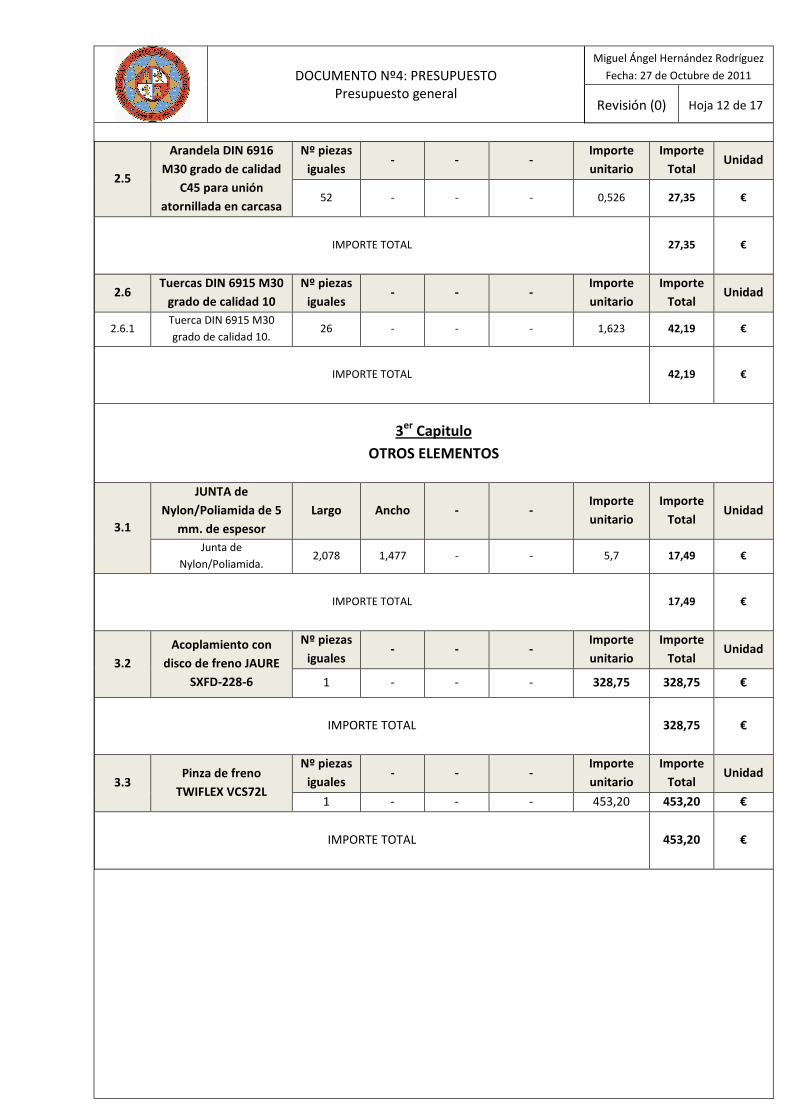
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 12 de 17
2.5
Arandela DIN 6916
M30 grado de calidad
C45 para unión
atornillada en carcasa
Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
52 - - - 0,526 27,35 €
IMPORTE TOTAL 27,35 €
2.6 Tuercas DIN 6915 M30
grado de calidad 10
Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
2.6.1 Tuerca DIN 6915 M30
grado de calidad 10. 26 - - - 1,623 42,19 €
IMPORTE TOTAL 42,19 €
3er Capitulo
OTROS ELEMENTOS
3.1
JUNTA de
Nylon/Poliamida de 5
mm. de espesor
Largo Ancho - - Importe
unitario
Importe
Total Unidad
Junta de
Nylon/Poliamida. 2,078 1,477 - - 5,7 17,49 €
IMPORTE TOTAL 17,49 €
3.2
Acoplamiento con
disco de freno JAURE
SXFD-228-6
Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
1 - - - 328,75 328,75 €
IMPORTE TOTAL 328,75 €
3.3 Pinza de freno
TWIFLEX VCS72L
Nº piezas
iguales - - -
Importe
unitario
Importe
Total Unidad
1 - - - 453,20 453,20 €
IMPORTE TOTAL 453,20 €
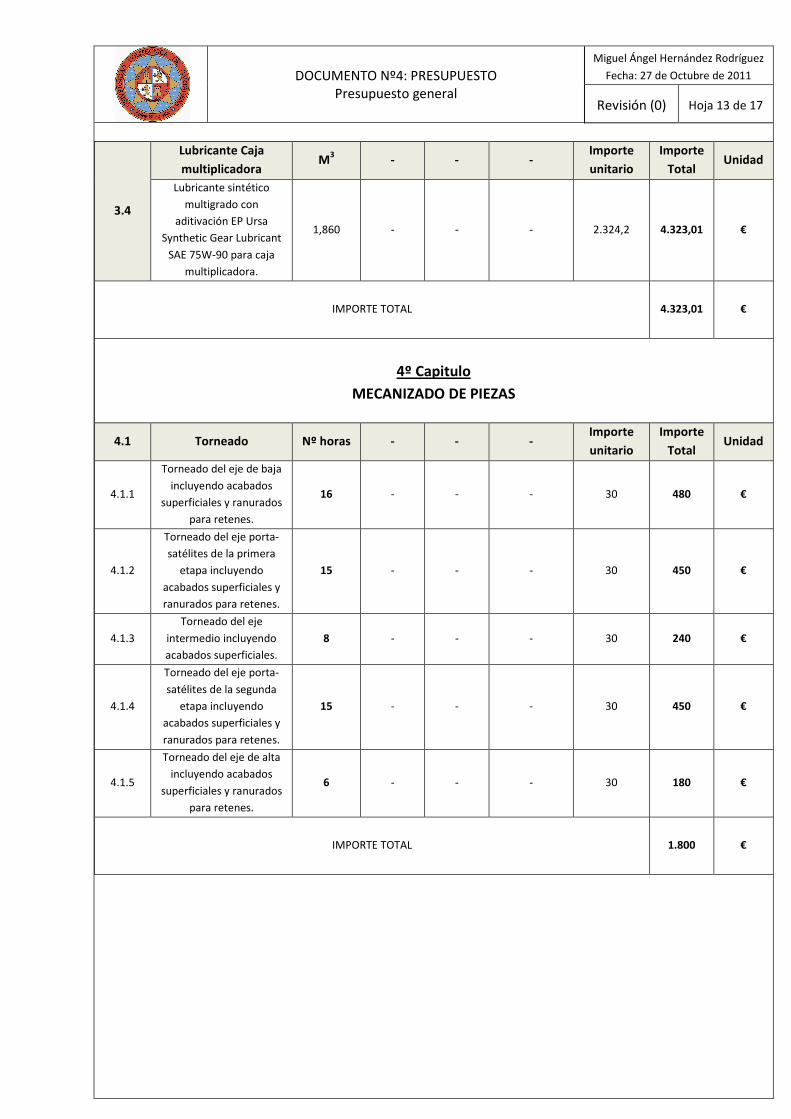
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 13 de 17
3.4
Lubricante Caja
multiplicadora M
3 - - -
Importe
unitario
Importe
Total Unidad
Lubricante sintético
multigrado con
aditivación EP Ursa
Synthetic Gear Lubricant
SAE 75W-90 para caja
multiplicadora.
1,860 - - - 2.324,2 4.323,01 €
IMPORTE TOTAL 4.323,01 €
4º Capitulo
MECANIZADO DE PIEZAS
4.1 Torneado Nº horas - - - Importe
unitario
Importe
Total Unidad
4.1.1
Torneado del eje de baja
incluyendo acabados
superficiales y ranurados
para retenes.
16 - - - 30 480 €
4.1.2
Torneado del eje porta-
satélites de la primera
etapa incluyendo
acabados superficiales y
ranurados para retenes.
15 - - - 30 450 €
4.1.3
Torneado del eje
intermedio incluyendo
acabados superficiales.
8 - - - 30 240 €
4.1.4
Torneado del eje porta-
satélites de la segunda
etapa incluyendo
acabados superficiales y
ranurados para retenes.
15 - - - 30 450 €
4.1.5
Torneado del eje de alta
incluyendo acabados
superficiales y ranurados
para retenes.
6 - - - 30 180 €
IMPORTE TOTAL 1.800 €
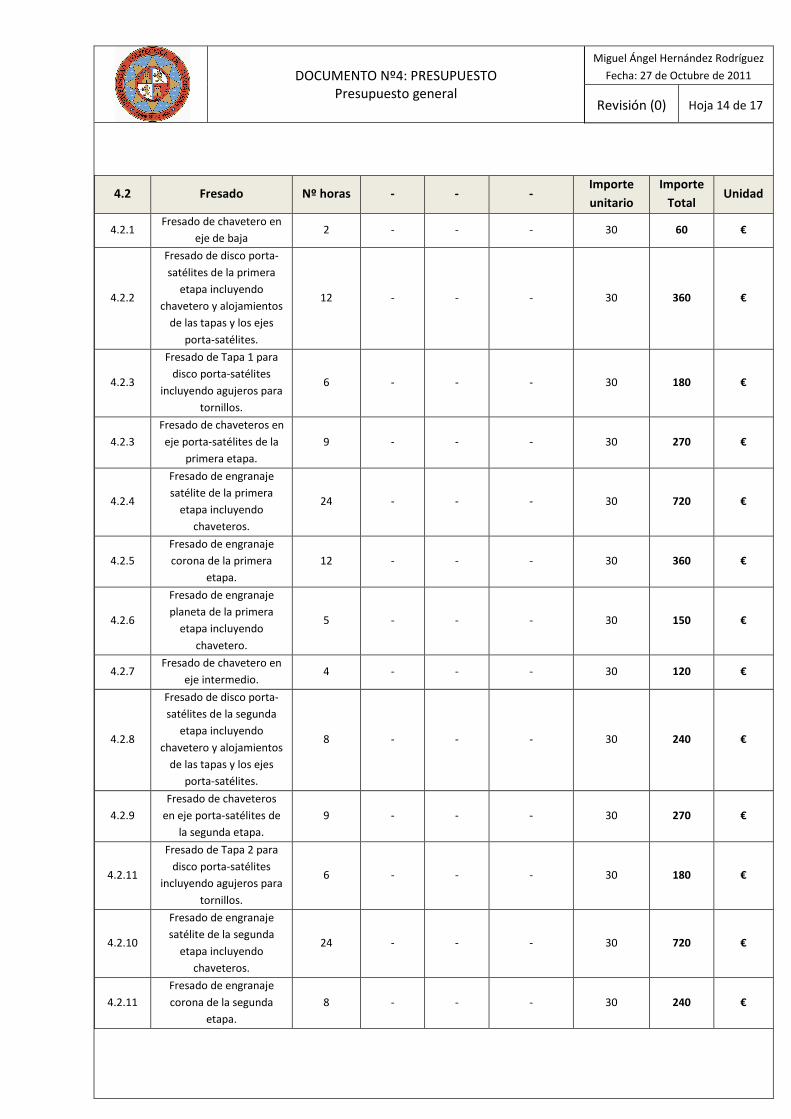
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 14 de 17
4.2 Fresado Nº horas - - - Importe
unitario
Importe
Total Unidad
4.2.1 Fresado de chavetero en
eje de baja 2 - - - 30 60 €
4.2.2
Fresado de disco porta-
satélites de la primera
etapa incluyendo
chavetero y alojamientos
de las tapas y los ejes
porta-satélites.
12 - - - 30 360 €
4.2.3
Fresado de Tapa 1 para
disco porta-satélites
incluyendo agujeros para
tornillos.
6 - - - 30 180 €
4.2.3
Fresado de chaveteros en
eje porta-satélites de la
primera etapa.
9 - - - 30 270 €
4.2.4
Fresado de engranaje
satélite de la primera
etapa incluyendo
chaveteros.
24 - - - 30 720 €
4.2.5
Fresado de engranaje
corona de la primera
etapa.
12 - - - 30 360 €
4.2.6
Fresado de engranaje
planeta de la primera
etapa incluyendo
chavetero.
5 - - - 30 150 €
4.2.7 Fresado de chavetero en
eje intermedio. 4 - - - 30 120 €
4.2.8
Fresado de disco porta-
satélites de la segunda
etapa incluyendo
chavetero y alojamientos
de las tapas y los ejes
porta-satélites.
8 - - - 30 240 €
4.2.9
Fresado de chaveteros
en eje porta-satélites de
la segunda etapa.
9 - - - 30 270 €
4.2.11
Fresado de Tapa 2 para
disco porta-satélites
incluyendo agujeros para
tornillos.
6 - - - 30 180 €
4.2.10
Fresado de engranaje
satélite de la segunda
etapa incluyendo
chaveteros.
24 - - - 30 720 €
4.2.11
Fresado de engranaje
corona de la segunda
etapa.
8 - - - 30 240 €
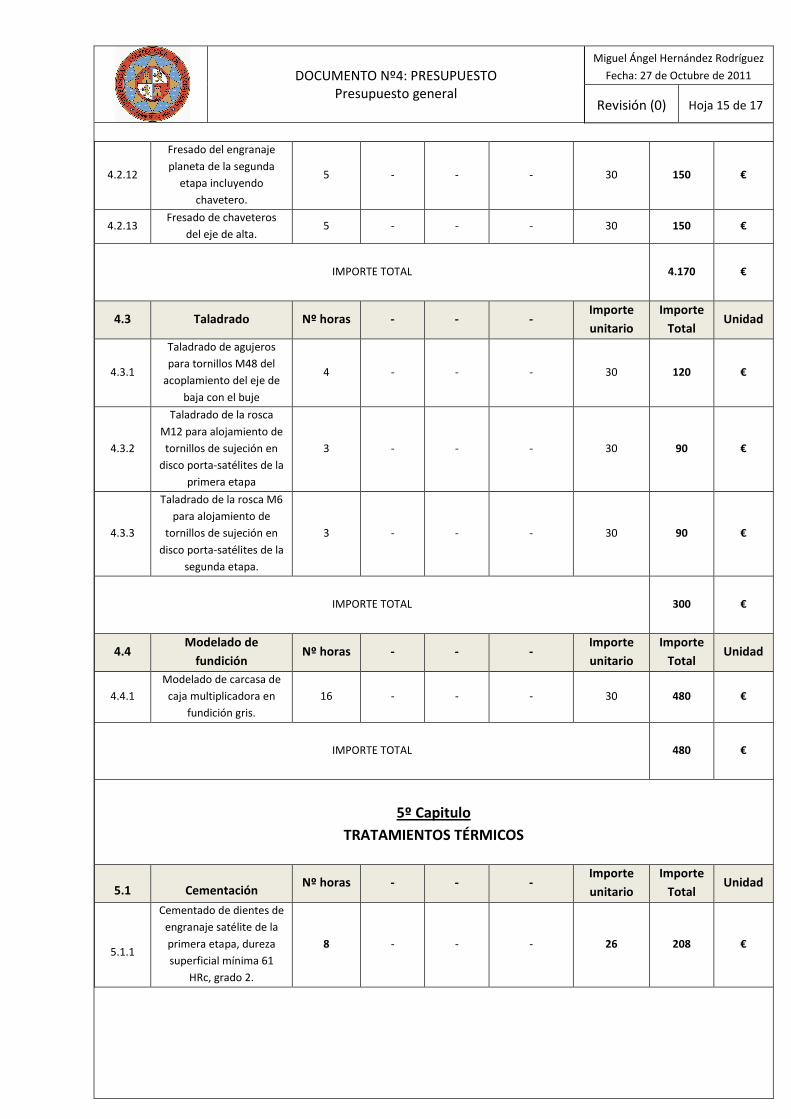
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 15 de 17
4.2.12
Fresado del engranaje
planeta de la segunda
etapa incluyendo
chavetero.
5 - - - 30 150 €
4.2.13 Fresado de chaveteros
del eje de alta. 5 - - - 30 150 €
IMPORTE TOTAL 4.170 €
4.3 Taladrado Nº horas - - - Importe
unitario
Importe
Total Unidad
4.3.1
Taladrado de agujeros
para tornillos M48 del
acoplamiento del eje de
baja con el buje
4 - - - 30 120 €
4.3.2
Taladrado de la rosca
M12 para alojamiento de
tornillos de sujeción en
disco porta-satélites de la
primera etapa
3 - - - 30 90 €
4.3.3
Taladrado de la rosca M6
para alojamiento de
tornillos de sujeción en
disco porta-satélites de la
segunda etapa.
3 - - - 30 90 €
IMPORTE TOTAL 300 €
4.4 Modelado de
fundición Nº horas - - -
Importe
unitario
Importe
Total Unidad
4.4.1
Modelado de carcasa de
caja multiplicadora en
fundición gris.
16 - - - 30 480 €
IMPORTE TOTAL 480 €
5º Capitulo
TRATAMIENTOS TÉRMICOS
5.1 Cementación Nº horas - - -
Importe
unitario
Importe
Total Unidad
5.1.1
Cementado de dientes de
engranaje satélite de la
primera etapa, dureza
superficial mínima 61
HRc, grado 2.
8 - - - 26 208 €
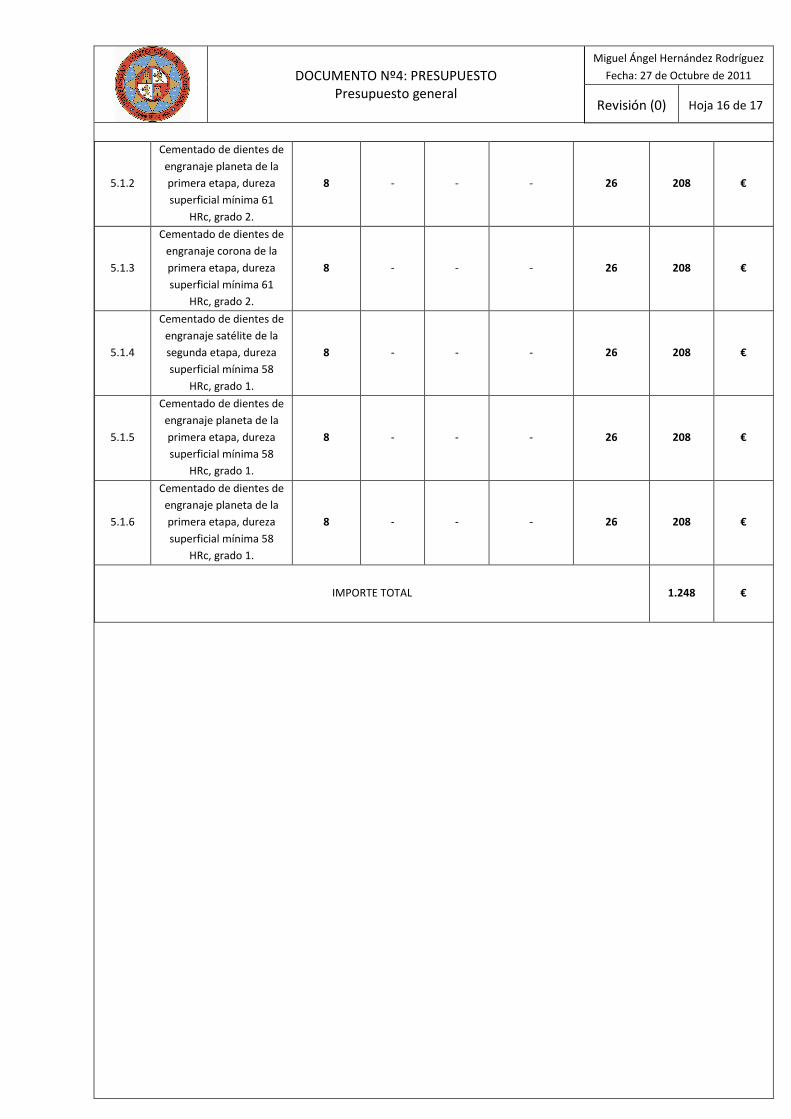
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 16 de 17
5.1.2
Cementado de dientes de
engranaje planeta de la
primera etapa, dureza
superficial mínima 61
HRc, grado 2.
8 - - - 26 208 €
5.1.3
Cementado de dientes de
engranaje corona de la
primera etapa, dureza
superficial mínima 61
HRc, grado 2.
8 - - - 26 208 €
5.1.4
Cementado de dientes de
engranaje satélite de la
segunda etapa, dureza
superficial mínima 58
HRc, grado 1.
8 - - - 26 208 €
5.1.5
Cementado de dientes de
engranaje planeta de la
primera etapa, dureza
superficial mínima 58
HRc, grado 1.
8 - - - 26 208 €
5.1.6
Cementado de dientes de
engranaje planeta de la
primera etapa, dureza
superficial mínima 58
HRc, grado 1.
8 - - - 26 208 €
IMPORTE TOTAL 1.248 €
DOCUMENTO Nº4: PRESUPUESTO Presupuesto general
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Hoja 17 de 17
RESUMEN DEL PRESUPUESTO
-1er Capítulo: Aceros………………………………………………………………….83.421,12 €
-2º Capítulo: Elementos normalizados………………………………………15.319,96 €
-3er Capítulo: Otros elementos…………………………………………..........5.122,45 €
-4º Capítulo: Mecanizado de piezas……………………………………………6.750 €
-5º Capítulo: Tratamientos térmicos………………………………………….1.248 €
PEM……………………………………………………………………………………………111.861,53 €
12% de beneficio industrial sobre el PEM……………………………………13.423,38 €
PEC………………………………………………………………………………………………125.284,91 €
Asciende el presupuesto de ejecución material a la cantidad de ciento once mil ochocientos
sesenta y un euros con cincuenta y tres céntimos.
Asciende el presupuesto de ejecución por contrata a la cantidad de ciento veinticinco mil
doscientos ochenta y cuatro euros con noventa y un céntimos.
El Ingeniero Técnico Industrial:
Miguel Ángel Hernández Rodríguez
Cartagena, 27 de Octubre de 2011
UNIVERSIDAD POLITÉCNICA DE CARTAGENA
E.T.S.I.I
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INDUSTRIAL
PROYECTO FIN DE CARRERA Diseño del conjunto eje-acoplamiento-reductora epicicloidal
Documento Nº2. Planos
Peticionario: Departo. de Ingeniería Mecánica, Universidad Politécnica de Cartagena.
Nombre: Miguel Ángel Hernández Rodríguez
Lugar: Cartagena
Fecha: 27 de Octubre de 2011.
DOCUMENTO Nº 2 PLANOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Página 0 de 0
ÍNDICE
Denominación Nº de Plano
Conjunto general……………..……………………………………………………………………………….………………CG 0
Eje de Baja………………………..………………………………………………………………………….…………………..EB 1
Conjunto multiplicadora…….………………………………………………………………………..……………….…..CM 0
Conjunto Primera etapa……..………………………………………………………………………………………….….PEM 0
Engranaje Satélite……………….……………………………………………………………………………………………..PEM 1
Engranaje Planeta……………….……………………………………………………………………………………………..PEM 2
Engranaje Corona…………………..…………………………………………………………………………………………..PEM 3
Disco porta-satélites…………………………………………………………………………………………………………..PEM 4
Eje porta-satélites……………………..………………………………………………………………………………………..PEM 5
Eje intermedio……………………………..……………………………………………………………………………………..PEM 6
Conjunto Segunda etapa……………………………………………………………………………………………….……SEM 0
Engranaje Satélite……………………………………………………………………………………………………………...SEM 1
Engranaje Planeta……………………………………………………………………………………………………………...SEM 2
Engranaje Corona……………………………………………………………………………………………………………....SEM 3
Disco porta-satélites…………………………………………………………………………………………………………..SEM 4
Eje porta-satélites……………………………………………………………………………………………………………….SEM 5
Eje de alta……………………………………………………………………………………………………………………….…..EA 1
Carcasa……………..…………………………………………………………………………………………………………..…….CCS1

DOCUMENTO Nº 2 PLANOS
Miguel Ángel Hernández Rodríguez
Fecha: 27 de Octubre de 2011
Revisión (0) Página 0 de 0
El ingeniero Técnico Industrial:
Miguel Ángel Hernández Rodríguez
Cartagena, 27 de Octubre de 2011